Изобретение относится к области электротехники, а точнее к вентильным электродвигателям с встроенными датчиками углового положения ротора.
Известны вентильные многополюсные электродвигатели с встроенными датчиками углового положения ротора, содержащие статор с числом зубцов zст=m⋅k⋅n, где m - число фаз обмотки статора, k - число катушечных групп в фазе, n - число зубцов статора в катушечной группе, каждая из которых состоит из последовательно - встречно соединенных между собой n - 1 катушек, охватывающих по одному зубцу статора, ротор с чередующимися по полярности полюсами, число которых 2р=zст±k, тахометрическую обмотку, размещенную на зубцах статора, расположенных между катушечными группами фаз, датчик углового положения ротора, первые катушки основной обмотки фаз которого размещены в основных аксиальных отверстиях, расположенных на оси зубцов, в которых катушки основной обмотки датчика размещены в отверстиях, выполненных ортогонально основным аксиальным отверстиям, при этом основная обмотка первой фазы датчика положения расположена в первой паре ортогональных отверстий, а основная обмотка второй фазы - во второй паре ортогональных отверстий и катушки дополнительной обмотки датчика углового положения расположены на тех же зубцах, что и тахометрическая обмотка, причем катушки в каждой фазе тахометрической обмотки соединены последовательно - встречно, а катушки дополнительной обмотки датчика углового положения - последовательно-согласно (см. патент РФ №2076437, кл. H02к 29/06 от 27.03.1997 г., Бюл. №9).
Проблема такого вентильного электродвигателя состоит в низком коэффициенте использования объема, т.к. в каждой катушечной группе фазной обмотки один зубец статора не создает вращающий момент, поскольку содержит катушки тахометрической обмотки и датчика углового положения ротора, а наличие в статоре на оси зубцов аксиальных отверстий для катушек датчика угла значительно увеличивает наружный диаметр статора и соответственно его массу.
Указанные недостатки устранены в вентильном электродвигателе с встроенными датчиками углового положения ротора, содержащем электронный блок управления, статор с числом зубцов zст=m⋅k⋅n, где m - число фаз в обмотке, k - число катушечных групп в фазе, n - число катушек в катушечной группе, каждая из которых состоит из последовательно - встречно соединенных между собой катушек, охватывающих по одному зубцу статора, при этом катушечные группы каждой фазы при n четном соединены между собой встречно, а при n нечетном и m равным 3 согласно, ротор с чередующимися по полярности полюсами, выполненными из радиально намагниченных и закрепленных на магнитопроводном кольце постоянных магнитов, число которых 2р=zст±k, датчики углового положения ротора, в качестве которых приняты датчики Холла, причем датчик Холла каждой фазы при n четном установлен в пазу статора, расположенном на оси симметрии катушечной группы соответствующей фазы, а при n нечетном в ближайшем к оси симметрии катушечной группы пазу статора соответствующей фазы (см. патент РФ №2188494, кл. H02к 29/08, 29/12, 29/14).
Благодаря применению в качестве датчиков углового положения ротора датчиков Холла такой вентильный электродвигатель имеет больший коэффициент использования объема, т.к. у него все зубцы катушечных групп содержат катушки фазных обмоток, а также значительно уменьшен наружный диаметр статора из-за отсутствия расположенных на оси зубцов аксиальных отверстий для катушек датчиков угла.
Существенной проблемой такого вентильного электродвигателя является сравнительно невысокий коэффициент полезного действия (к.п.д.), т.к. из-за индуктивного сопротивления фазных обмоток ток в фазах устанавливается не сразу после включения датчика Холла, а по нарастающей кривой, аналогично и при отключении датчика Холла ток в фазе отключается не сразу, а спадает по кривой, в результате чего остаточный ток в фазе после его отключения датчиком Холла, создает на роторе, по крайней мере, двумя диаметрально расположенными зубцами статора, встречный момент. Кроме того, зубцы статора, находящиеся в зоне датчика Холла в момент его отключения, практически полностью перекрываются полюсами ротора и поэтому катушки этих зубцов не создают вращающего момента, а только увеличивают потребляемую электродвигателем мощность.
Целью данного изобретения является устранение указанной проблемы, т.е. повышение к.п.д. вентильного электродвигателя с встроенными датчиками углового положения ротора.
Указанная цель достигается тем, что в вентильном электродвигателе с встроенными датчиками углового положения ротора, содержащем электронный блок управления, статор с числом зубцов zст=m⋅k⋅n, где m - число фаз обмотки статора, k - число катушечных групп в фазе, n - число катушек в катушечной группе, каждая из которых состоит их последовательно - встречно соединенных между собой катушек, охватывающих по одному зубцу статора, при этом катушечные группы каждой фазы при n четном соединены между собой встречно, а при n нечетном и m равном 3 согласно, ротор с чередующимися по полярности полюсами, изготовленными из радиально намагниченных и закрепленных на магнитопроводном кольце постоянных магнитов, число которых 2р=zст±k, датчики углового положения ротора, в качестве которых приняты датчики Холла, причем датчик Холла каждой фазы при n четном установлен в пазу статора, расположенном на оси симметрии катушечной группы соответствующей фазы, а при n нечетном в ближайшем к оси симметрии катушечной группы пазу статора соответствующей фазы, каждая фаза содержит дополнительный датчик Холла, расположенный от основного датчика Холла, установленного на оси симметрии катушечной группы этой фазы на числе зубцовых делений в диапазоне от 1 до zст / 2k.
При этом, при реверсе предложенного вентильного электродвигателя используются те же основные и дополнительные датчики Холла, подключенные к фазам электронным блоком управления соответственно заданному направлению вращения ротора.
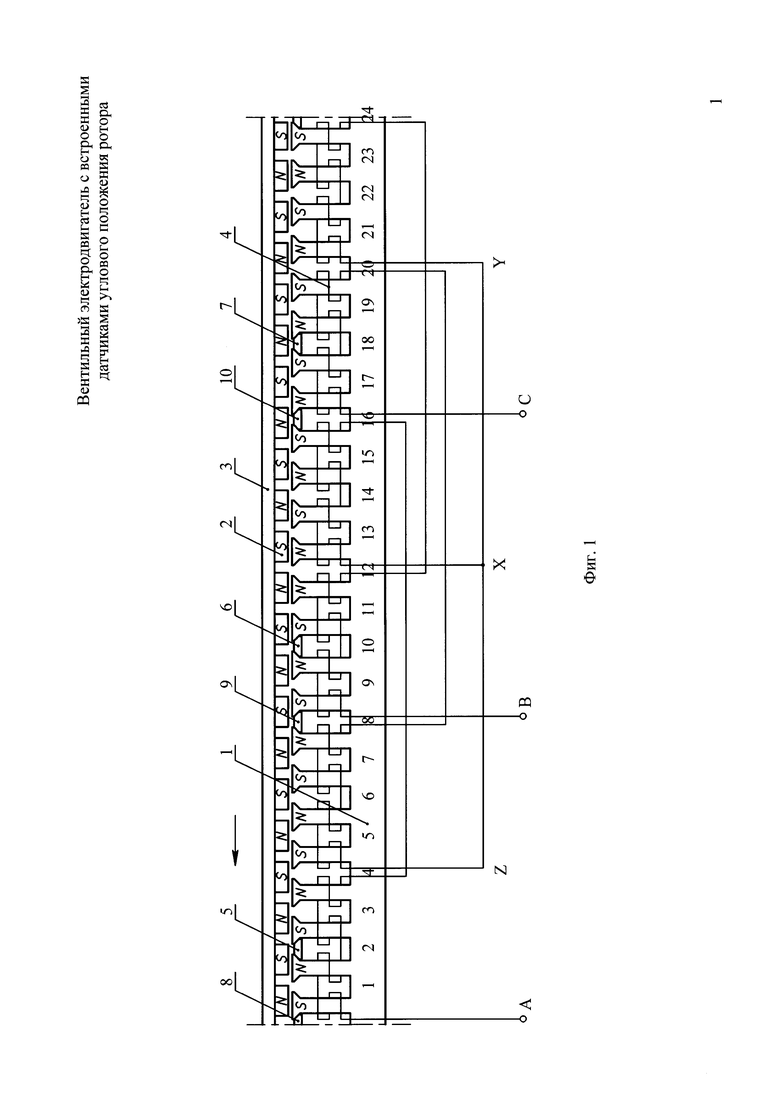
На чертеже фиг. 1 представлена развернутая схема предложенного трехфазного вентильного электродвигателя с встроенными датчиками углового положения ротора.
На чертеже фиг. 2 представлена диаграмма сигналов датчиков Холла для трех фаз электродвигателя, изображенного на фиг. 1.
На чертеже фиг. 3 представлена диаграмма сигналов датчиков Холла для трех фаз электродвигателя, изображенного на фиг. 1 при вращении ротора в обратном направлении.
Предложенный вентильный электродвигатель содержит: статор 1 с числом зубцов статора zст=24, (см. фиг. 1) изготовленный из листовой стали; ротор с числом полюсов 2p=22, изготовленных из постоянных магнитов 2, намагниченных в радиальном направлении и закрепленных на магнитопроводном кольце 3; трехфазную обмотку, состоящую из соединенных по схеме звезда фаз А - X, В - Y, С - Z, каждая из которых состоит из последовательно - встречно соединенных между собой k=2 катушечных групп, в свою очередь каждая из которых состоит из последовательно - встречно соединенных между собой катушек 4, число которых п определяется из соотношения n= zст / m⋅k=24 / 3⋅2=4; шесть датчиков Холла, три из которых 5, 6, 7 основные, установленные в пазах, расположенных на оси симметрии катушечных групп соответствующей фазы, и три дополнительных 8, 9,10, смещенных относительно основных датчиков Холла 5, 6, 7 в одну сторону на число зубцовых делений в диапазоне от 1 до zст /2k, т.е. от 1 до 6, а точнее на два зубцовых деления статора (см. фиг. 1). Поскольку число пар полюсов ротора 2p, равное 22, меньше числа зубцов статора zст, равного 24, направление вращения ротора противоположно направлению вращения электромагнитного поля статора (см. фиг. 1 и 2), при этом, одному электрическому периоду поля статора (360 градусов), соответствует поворот ротора на два полюсных деления ротора.
Работает предложенный вентильный двигатель следующим образом.
Подключается электронный блок управления (на графических материалах не представлен), в результате чего срабатывают датчики Холла в соответствии с полярностью находящихся против них постоянных магнитов, далее сигналы с датчиков Холла обрабатываются контроллером, при необходимости инвертируются, усиливаются и подаются на транзисторы, которые управляют током в фазах. На фиг. 1 изображено исходное положение ротора, при котором переключающая датчики Холла линия, находящаяся на оси симметрии между соседними магнитами, совпадает с линией, проходящей через середину пазов 11 и 23, а на фиг. 2 с вертикальными линиями, соответствующими пазам 11 и 23. При таком положении ротора подключены все три фазы А, В и С, создающие направленный по указанной на фиг. 1 стрелке суммарный момент, под воздействием которого ротор поворачивается от исходного положения, изображенного на фиг. 1, по направлению стрелки, например, на 1/12 электрического периода, т.е на 30 электрических градусов, что соответствует повороту электромагнитного поля статора вправо на два зубцовых деления (т.е. от 11 до 13 вертикальной линии фиг. 2), а ротора на 1/6 полюсного деления влево. В результате чего срабатывает дополнительный датчик Холла 8, отключая ток в фазе А.Поскольку дополнительный датчик Холла фазы А 8 срабатывает раньше основного датчика Холла этой фазы 5 на 30 электрических градусов, то длительность сигнала фазы А (см. фиг. 2), а соответственно и тока в фазе А составляет 150 электрических градусов. При дальнейшем повороте ротора на 1/6 полюсного деления, а поля статора на 30 электрических градусов (до вертикальной линии паза 15 фиг. 2) срабатывает датчик Холла 5, сигнал с которого включает ток обратного направления в фазе А. Далее, при повороте ротора еще на 1/6 полюсного деления, а поля статора до линии 17 (см. фиг. 2), срабатывает дополнительный датчик Холла 10, отключая ток в фазе С также на 30 электрических градусов раньше, чем его отключил бы датчик Холла 7. При последующем повороте ротора на 1/6 полюсного деления, а поля ротора до линии 19 срабатывает основной датчик Холла 7 и включает ток в фазе С. Затем, при повороте ротора еще на 1/6 полюсного деления, а поля статора на фиг. 2 до линии 21, срабатывает дополнительный датчик Холла 9, сигнал которого отключает ток в фазе В также раньше, чем его отключил бы датчик Холла 6 и т.д..
При реверсе предложенного вентильного электродвигателя используются те же самые 6 датчиков Холла. Так, посредством электронного блока управления, реверс осуществляется, например, следующим образом. Управление фазы А происходит так же, как и при вращении ротора по направлению стрелки (см. фиг. 1) датчиками Холла 5 и 8, а датчики Холла фазы В 6 и 9 управляют током фазы С и соответственно датчики Холла фазы С 7 и 10 током фазы В (см. фиг. 3).
Таким образом, благодаря наличию дополнительных датчиков Холла 8, 9 и 10, сигналы на отключение тока в каждом полупериоде фаз поступают через 150 электрических градусов после его включения, а не через 180, как в прототипе, что уменьшает потери мощности в фазных обмотках, а также исключает возникновение на роторе встречного момента, в результате чего обеспечивается повышение к.п.д. вентильного электродвигателя.
Поскольку предлагаемые вентильные электродвигатели выполняются, как правило, с числом катушечных групп в фазе к не менее двух, то основной датчик Холла фазы может находиться в одной катушечной группе, а дополнительный датчик Холла этой же фазы в другой, В этом случае число зубцовых делений между основным и дополнительным датчиком Холла фазы принимается из того же соотношения, т.е. в диапазоне от 1 до zст / 2k, только в качестве основного датчика Холла принимается ось симметрии другой катушечной группы, относительно которой установлен дополнительный датчик Холла.
Предложенный вентильный электродвигатель может быть выполнен с датчиками углового положения ротора другого типа, например, оптическими, которые также обеспечивают длительность сигнала в полупериоде меньше 180 электрических градусов.
Предложенный вентильный двигатель может быть выполнен с ротором, выполненным из листовой электротехнической стали с полюсами, возбуждаемыми постоянным током.
Предложенный вентильный электродвигатель при использовании в разрабатываемых следящих электрических приводах, обеспечил получение высоких энергетических показателей и в дальнейшем планируется его серийное изготовление.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| Многополюсный синхронный электродвигатель | 2021 |
|
RU2779505C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074489C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2072611C1 |
| М-ФАЗНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2113755C1 |

Изобретение относится к электротехнике. Технический результат состоит в повышении КПД. Вентильный электродвигатель со встроенными датчиками углового положения ротора содержит электронный блок управления, статор с числом зубцов zст=m⋅k⋅т, где m - число фаз обмотки статора, k - число катушечных групп в фазе, n - число катушек в катушечной группе, каждая из которых состоит из последовательно - встречно соединенных между собой катушек, охватывающих по одному зубцу статора. Катушечные группы каждой фазы при n четном соединены между собой встречно, а при n нечетном и m, равном трем, согласно. Ротор выполнен с чередующимися по полярности полюсами, изготовленными из радиально намагниченных и закрепленных на магнитопроводном кольце постоянных магнитов, число которых 2р=zст±k. В качестве датчиков углового положения ротора использованы датчики Холла. Датчик Холла фазы при n четном установлен в пазу статора, расположенном на оси симметрии катушечной группы соответствующей фазы, а при n нечетном в ближайшем к оси симметрии катушечной группы пазу соответствующей фазы. Каждая фаза содержит дополнительный датчик Холла, установленный от основного датчика Холла на оси симметрии катушечной группы этой фазы на числе зубцовых делений в диапазоне от 1 до zст/2k. 1 з.п. ф-лы, 3 ил.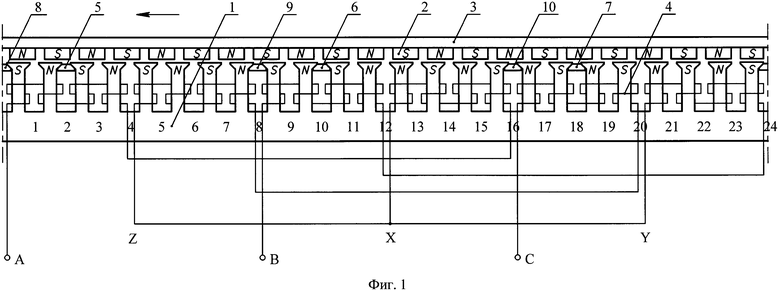
1. Вентильный электродвигатель с встроенными датчиками углового положения ротора, содержащий электронный блок управления, статор с числом зубцов zст=m⋅k⋅n, где m - число фаз обмотки статора, k - число катушечных групп в фазе, n - число катушек в катушечной группе, каждая из которых состоит из последовательно - встречно соединенных между собой катушек, охватывающих по одному зубцу статора, при этом катушечные группы каждой фазы при n четном соединены между собой встречно, а при n нечетном и m, равном трем, согласно, ротор с чередующимися по полярности полюсами, изготовленными из радиально намагниченных и закрепленных на магнитопроводном кольце постоянных магнитов, число которых 2р=zст±k, датчики углового положения ротора, в качестве которых приняты датчики Холла, причем датчик Холла фазы при n четном установлен в пазу статора, расположенном на оси симметрии катушечной группы соответствующей фазы, а при n нечетном в ближайшем к оси симметрии катушечной группы пазу соответствующей фазы, отличающийся тем, что каждая фаза содержит дополнительный датчик Холла, расположенный от основного датчика Холла, установленного на оси симметрии катушечной группы этой фазы на числе зубцовых делений в диапазоне от 1 до zст/2k.
2. Вентильный электродвигатель по п. 1, отличающийся тем, что при реверсе используются те же основные и дополнительные датчики Холла, подключенные посредством электронного блока управления соответственно заданному направлению вращения ротора.
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| СИНХРОННЫЙ АГРЕГАТ | 1991 |
|
RU2076437C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2231202C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 1997 |
|
RU2153757C2 |
| WO1992006530 A1, 16.04.1992. | |||

