ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится главным образом к области контроля измерительной схемы, например, двигателя летательного аппарата. Оно, в частности, относится к контролю неплотного контакта, который может повлиять на датчики, типа линейного переменного дифференциального трансформатора, называемого LVDT (от английского "Linear Variable Differential Transformer"), измерительной цепи.
СОСТОЯНИЕ ПРЕДЫДУЩЕГО УРОВНЯ ТЕХНИКИ
Измерительная цепь, например, двигателя летательного аппарата, включает в себя LVDT-датчики, которые являются электрическими индуктивными датчиками линейных перемещений. LVDT-датчики используются, в частности для слежения за положением лопаток с переменным углом установки статора VSV (от английского "Variable Stator Vane"), выпускных клапанов VBV (от английского "Variable Bleed Valve") или клапана дозатора топлива. LVDT-датчики также используются для регулировки зазора турбины высокого давления HPTCC (от английского "High Pressure Turbine Clearance Control").
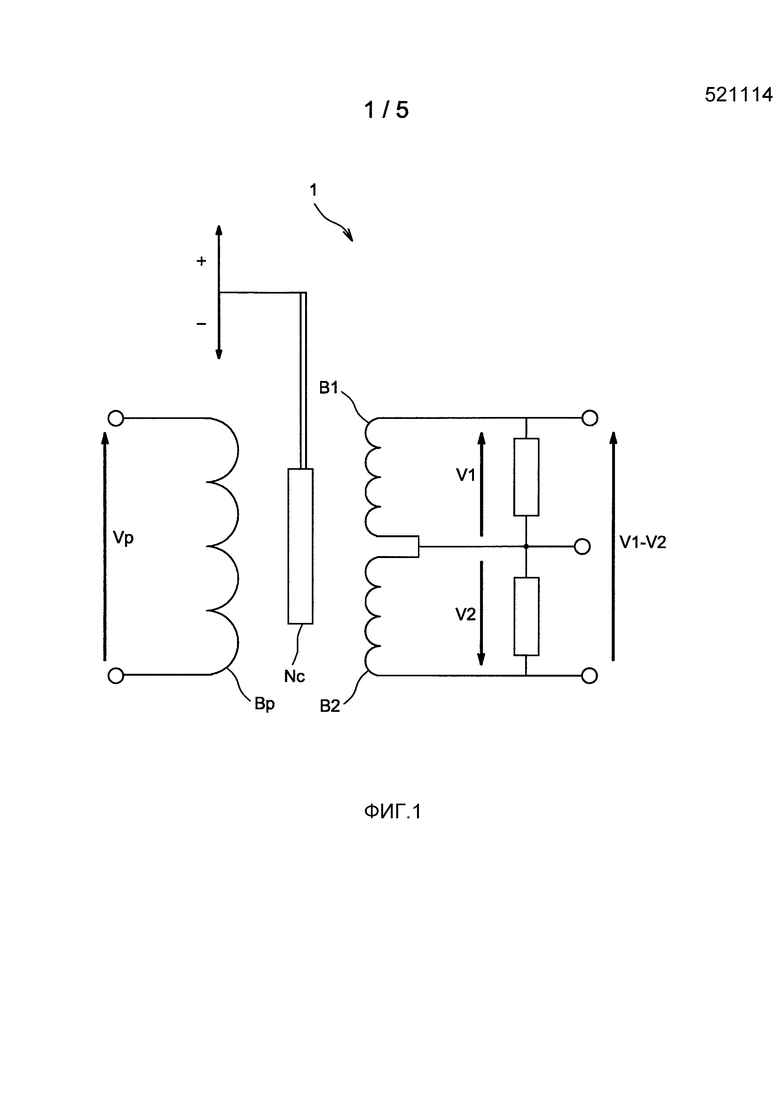
Как показано на фиг. 1, LVDT-датчик 1 содержит трансформатор, который сам по себе содержит первичную цепь, образованную обмоткой Bp, и две вторичные цепи, каждая из которых образована обмоткой B1, B2. Эти три обмотки являются цилиндрическими и соосными. Тогда как первичная обмотка Bp запитана напряжением Vp, например, синусоидальным, вторичное напряжение V1, V2 существует на клеммах каждой из вторичных обмоток B1 и B2.
LVDT-датчик 1 также содержит центральный сердечник NC, способный перемещаться вдоль оси обмоток. Перемещение сердечника вызывает изменение магнитного поля внутри трансформатора. Точнее, когда сердечник перемещается из центрального положения, напряжение, индуцированное в одной из вторичных обмоток, увеличивается и напряжение, индуцированное в другой вторичной обмотке, уменьшается. Это порождает дифференциальное выходное напряжение (V1-V2), которое линейно изменяется в зависимости от положения сердечника.
LVDT-датчик 1 может работать в дифференциальном режиме, его выход является тогда дифференциальным напряжением (V1-V2), или в дифференциальном режиме по сумме, его выход является разностью напряжений двух вторичных цепей по отношению к их сумме (V1-V2)/(V1+V2).
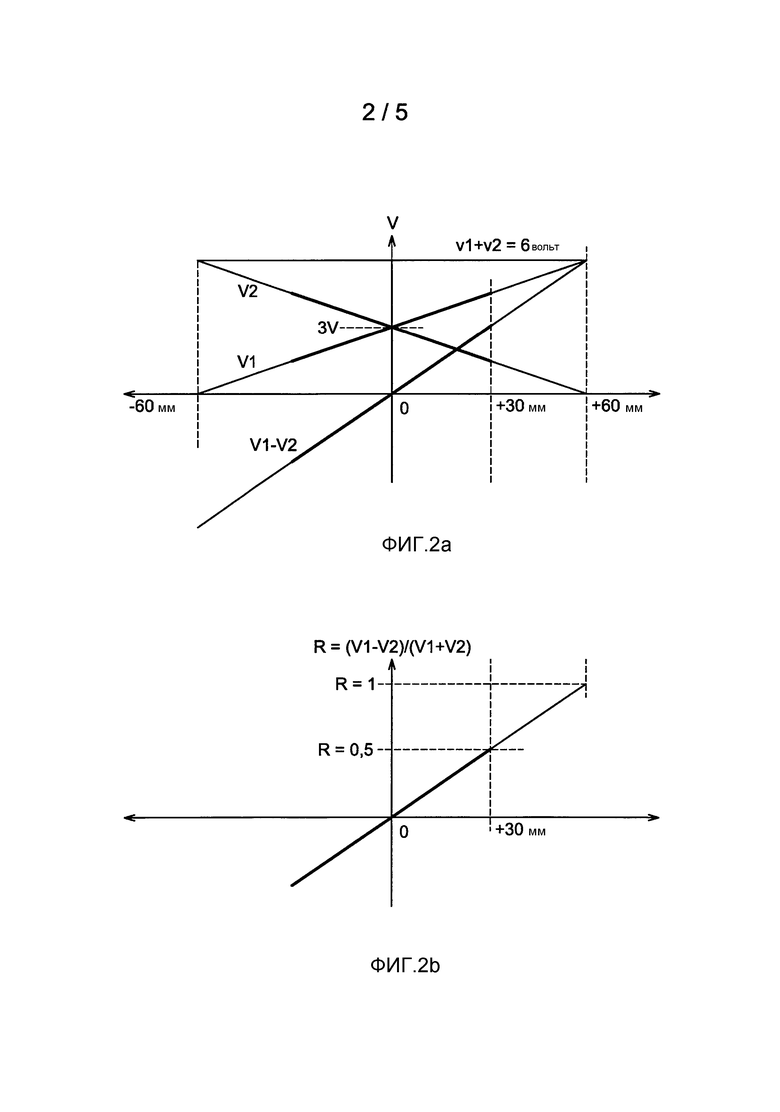
Фиг. 2a представляет изменение напряжений V1 и V2 на клеммах каждой из двух вторичных обмоток B1 и B2, а также изменение дифференциального напряжения (V1-V2) на клеммах совокупности двух обмоток, в зависимости от перемещения центрального сердечника NC.
Фиг. 2b представляет изменение коэффициента R дифференциального напряжения по отношению к сумме вторичных напряжений (V1-V2)/(V1+V2), в зависимости от смещения центрального сердечника NC.
Такая измерительная цепь работает в среде, в которой существуют сильные тепловые и вибрационные нагрузки. Эти нагрузки часто вызывают периодические сбои типа неплотного контакта. Неплотный контакт является периодическим и очень коротким разрывом электрической цепи или случайным замыканием на массу.
Когда неплотные контакты происходят на одной из вторичных обмоток, напряжение, измеренное на клеммах этой обмотки, является рубленным. После выпрямления, полученное значение RMS, и которое используется вычислительным устройством, принимает аномально низкие значения и изменяется беспорядочно, в зависимости от плотности микро-разрывов. Таким образом, позиция, рассчитанная на основании измерений LVDT-датчика, является беспорядочной и искаженной высокими или низкими пиками, в зависимости от места неисправности на одной или другой из обмоток.
Существуют также неплотные контакты с замыканием массу, которая является общей для двух вторичных обмоток. В этом случае, напряжения, измеренные на клеммах двух вторичных обмоток, страдают от сбоя и являются хаотически низкими.
Известно, что вычислительное устройство анализирует входные данные, для проверки их достоверности. Для этого, вычислительное устройство может использовать три основных типа тестов.
Первый тип является типом тестов электрической целостности. Эти тесты применяются при измерениях напряжения на клеммах вторичных обмоток LVDT-датчика.
Первый тест на электрическую целостность - проверка того, что измерения напряжения на клеммах вторичных обмоток находятся в заданном интервале, что позволяет обнаружить прямой обрыв цепи и короткое замыкание, то есть "откровенную" поломку. Однако этот тест не предназначен для обнаружения периодической разомкнутой цепи, так как в этом случае измеренные напряжения остаются в пределах заданного интервала.
Второй тест на электрическую целостность - проверка того, что сумма измерений напряжения на клеммах вторичных обмоток находится между минимальным и максимальным значением. В самом деле, LVDT-датчик обладает свойством, что сумма вторичных напряжений является почти постоянной, независимо от положения подвижного сердечника. Этот тест позволяет обнаружить электрические девиации, вызванные повреждениями изоляции. Этот тест, однако, не является удовлетворительным в случае неплотного контакта.
Действительно, наблюдение за суммой измерений напряжения на клеммах вторичных обмоток должно быть сделано в достаточно большом интервале значений, чтобы принять во внимание возможные погрешности источника питания (частоту или амплитуду возбуждающего сигнала), которые не являются поломками. Другими словами, интервал, определяемый максимальным значением и минимальным значением, является широким, так что возможно, что сумма напряжений колеблется вследствие неплотных контактов, не выходя из интервала. В таком случае, неисправность не обнаруживается.
Кроме того, когда этот тест обнаруживает периодическую поломку, сумма измерений напряжений может кратко выйти из доверительного интервала, а затем вернуться в доверительный интервал, и т.д. Следовательно, имеется периодическое обнаружение, что приводит к тому, что измерение выбранной позиции чередуется между ложным значением (когда компьютер не обнаруживает сбой) и правильным значением реконфигурации (когда компьютер обнаруживает сбой), что дестабилизирует систему.
Второй тип теста - тест правдоподобия (или тест диапазона или области). Этот тест применяется к позиции, рассчитанной на основе двух вторичных напряжений LVDT-датчика. Рассчитанное положение сравнивается с минимальным порогом и максимальным порогом. Таким образом, этот тип теста обнаруживает только ошибочные позиции и не обнаруживает небольшие колебания.
Третий тип теста - тест отклонения. Когда вышеупомянутые два типа тестов не обнаружили проблем в измерениях LVDT-датчика, можно определить положение подвижного сердечника. Всегда существуют два LVDT-датчика в резерве, значит, можно убедиться, что определенная позиция совпадает с позицией, определенной с помощью второго резервного LVDT-датчика. В том случае, когда есть отклонение между двумя определенными позициями, это означает, что по крайней мере одно из этих измерений является ошибочным. Тем не менее, определение отклонения между измерениями не позволяет определить, какой из двух датчиков неисправен.
Таким образом, оказывается, что известные тесты достоверности, не являются удовлетворительными для неплотного контакта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение направлено на решение проблем предшествующего уровня техники путем предоставления способа контроля датчика типа линейного переменного дифференциального трансформатора, включающего в себя две вторичные цепи, в которых соответственно индуцируют напряжение, линейно изменяющееся в зависимости от перемещения сердечника, отличающегося тем, что он включает итеративные этапы, на которых:
- рассчитывают разность между напряжениями на клеммах одной из вторичных цепей в данный момент времени и в предшествующий момент времени,
- рассчитывают разность между напряжениями на клеммах другой вторичной цепи в данный момент времени и в предшествующий момент времени,
- рассчитывают сумму двух ранее рассчитанных разностей,
- изменяют (E3) значение индикатора в зависимости от расстояния до нуля ранее рассчитанной суммы и
- сравнивают индикатор с по меньшей мере заранее определенным порогом.
Благодаря изобретению, неисправность типа неплотного контакта детектируется, и ошибочные значения идентифицируются и могут быть исключены из дальнейшей обработки, такой как регулирование.
Изобретение применяется непосредственно к измерениям напряжения одного и того же датчика. Тогда, проблема определения неисправного датчика устранена, так как можно самодиагностировать датчик.
Рассчитанная сумма близка к нулю, когда датчик работает нормально, и удаляется от нуля в случае неплотного контакта. Таким образом, значение индикатора изменяется в зависимости от нормальной работы датчика или наличия неплотного контакта.
Индикатор хранит в памяти историю изменений измеряемых напряжений и позволяет “не периодическое” детектирование периодической неисправности.
В предпочтительном варианте осуществления, индикатор находится между двумя границами, одна из которых указывает, что датчик работает нормально, а другая означает, что датчик неисправен.
В предпочтительном варианте осуществления, изменение индикатора включает в себя увеличение индикатора, если сумма близка к нулю, и уменьшение индикатора, если сумма удалена от нуля. Таким образом, индикатор возрастает в случае нормальной работы датчика и уменьшается в случае неплотного контакта.
В предпочтительном варианте осуществления, сравнение индикатора включает в себя сравнение с первым порогом и со вторым порогом, так что переход от состояния нормального функционирования к состоянию неисправности выполняется для значения, отличного от значения для обратного перехода.
Таким образом, создается явление гистерезиса, что позволяет избежать периодического объявления неисправности датчика.
Изобретение также относится к устройству контроля датчика типа линейного переменного дифференциального трансформатора, имеющего две вторичные цепи, в которых, соответственно, индуцируется напряжение, изменяющееся линейно в зависимости от перемещения сердечника, отличающемуся тем, что оно содержит:
- средство расчета разности между напряжениями на клеммах одной из вторичных цепей в данный момент времени и в предшествующий момент времени,
- средство расчета разности между напряжениями на клеммах другой вторичной цепи, в данный момент времени и в предшествующий момент времени,
- средство расчета суммы двух разностей, вычисленных ранее,
- средство изменения индикатора в зависимости от расстояния до нуля рассчитанной ранее суммы и
- средство сравнения индикатора с по меньшей мере одним заданным порогом.
Изобретение также относится к измерительной цепи, включающей в себя датчик типа линейного переменного дифференциального трансформатора, имеющего две вторичные цепи, в которых соответственно индуцируется напряжение, изменяющееся линейно в зависимости от перемещения сердечника, и устройство контроля, такое, как представлено ранее.
Устройство и измерительная цепь согласно изобретению демонстрируют преимущества, подобные тем, что представлены ранее.
В конкретном варианте осуществления, этапы способа в соответствии с изобретением реализованы командами компьютерной программы.
В результате, изобретение также относится к компьютерной программе на информационном носителе, эта программа может быть выполнена в компьютере, эта программа включает в себя инструкции, адаптированные для осуществления этапов способа такого, как описан выше.
Эта программа может использовать любой язык программирования и быть в виде исходного кода, объектного кода или промежуточного кода между исходным кодом и объектным кодом, таком как частично скомпилированный вид, или в любой другой желаемой форме.
Изобретение также относится к читаемому компьютером информационному носителю, содержащему команды компьютерной программы.
Носитель может быть любым объектом или устройством, способным хранить программу. Например, носитель может содержать средство хранения, такое как ПЗУ, например, CD-ROM или ПЗУ на микроэлектронной схеме, или средство магнитной записи, такое как дискета или жесткий диск.
С другой стороны, носитель информации может быть передаваемым носителем, таким как электрический или оптический сигнал, который может быть передан через электрический или оптический кабель, по радио или с помощью других средств. Программа согласно изобретению может быть, в частности, загружена по сети типа Интернет.
В качестве альтернативы, носитель информации может быть интегральной схемой, в которой программа встроена, схема адаптирована для исполнения или для того, чтобы быть использованной при исполнении способа согласно изобретению.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие особенности и преимущества станут очевидными, при прочтении предпочтительного варианта реализации, приведенного в качестве не ограничивающего примера, описанного со ссылкой на чертежи, на которых:
- Фиг. 1 демонстрирует LVDT-датчик.
- Фиг. 2a демонстрирует вторичные напряжения LVDT-датчика в соответствии с перемещением.
- Фиг. 2b демонстрирует дифференциальное напряжение, деленное на сумму вторичных напряжений, в соответствии с перемещением.
- Фиг. 3 демонстрирует вариант осуществления устройства в соответствии с изобретением.
- Фиг. 4 представляет собой закон увеличения индикатора в соответствии с изобретением.
- Фиг. 5 представляет собой вариант осуществления способа в соответствии с изобретением, в виде блок-схемы.
ПОДРОБНОЕ ОПИСАНИЕ КОНКРЕТНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1, 2а и 2b уже были описаны.
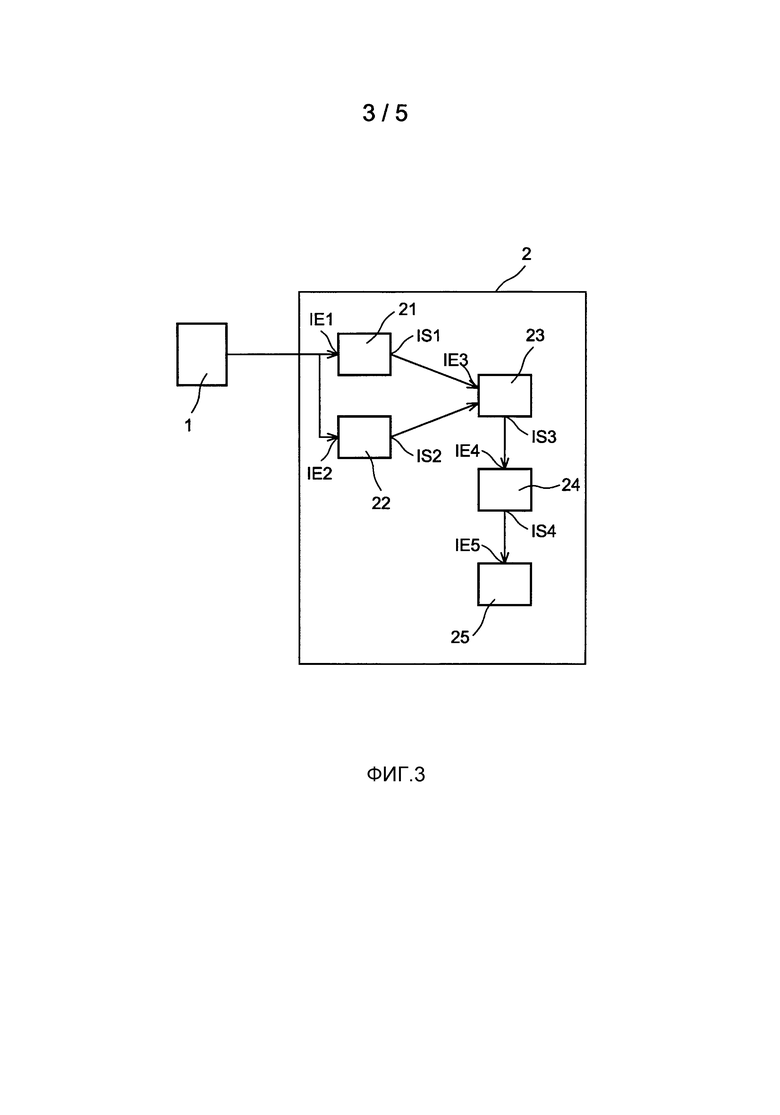
Фиг. 3 схематично представляет измерительную цепь, например, двигателя или турбореактивного двигателя летательного аппарата. Измерительная цепь обычно включает в себя два резервных пути, предназначенных для сбора с течением времени физических измерений, таких как температура, давление, положение и т.д.
Эти физические измерения производятся с помощью множества датчиков, из которых только LVDT-датчик 1 показан на фиг. 3. LVDT-датчик подключен к вычислительному устройству 2, например, ЭСУД с полной ответственностью, которое использует измерения, предоставляемые датчиками. Эти измерения производятся с заданной частотой. Обозначены V1t и V2t напряжения, соответственно измеренные на клеммах вторичных обмоток B1 и B2, в данный момент времени. Эти измеренные значения сохраняются во внутренней памяти вычислительного устройства или в памяти, связанной с ним.
В соответствии с изобретением, устройство контроля LVDT-датчика 1 связано с вычислительным устройством 2 или интегрировано в него. В обоих случаях, устройство контроля LVDT-датчик имеет структуру, общую с компьютером. Согласно варианту осуществления, показанному на фиг. 3, устройство контроля LVDT-датчика 1 встроено в вычислительное устройство 2. Только особенности, непосредственно связанные с изобретением, показаны и описаны, другие особенности вычислительного устройства хорошо известны специалисту в данной области.
Устройство контроля включает в себя входной интерфейс IЕ1, подключенный к модулю 21 расчета разницы между напряжениями на клеммах одной из вторичных цепей в данный момент времени t и в предшествующий момент времени (t-1). Например, модуль 21 рассчитывает разность: Δ1t=V1t-V1t-i.
Устройство контроля также включает в себя входной интерфейс IE2, соединенный с модулем 22 расчета разницы между напряжениями на клеммах другой из вторичных цепей в данный момент времени t и в предыдущий момент (t-1). Например, модуль 22 рассчитывает разность A2t=V2t-V2t-i.
Для обоих предыдущих расчетов разности напряжений, шаг по времени, например, 15 мс.
Эти два модуля расчета могут быть реализованы в одном модуле. Они включают в себя соответственно выходной интерфейс IS1, IS2, который соединен с входным интерфейсом IE3 модуля 23 расчета суммы двух ранее рассчитанных разностей:
St=Δ1t+Δ2t.
В теории сумма St строго равна нулю, так как перемещение подвижного сердечника вызывает увеличение, соответствующее уменьшению напряжения на клеммах одной из вторичных обмоток, и одновременно уменьшение, соответствующее увеличению напряжения на клеммах другой из вторичных обмоток, которые равны по абсолютной величине.
На практике, существуют недостатки, которые приводят к тому, что измеренные напряжения не изменяются строго линейно в соответствии с положением сердечника. Для преодоления этих недостатков, если сумма St остается в пределах диапазона значений, близких к нулю, работа датчика считается нормальной. Границы этого диапазона близки к нулю и могут быть определены экспериментально.
Этот модуль 23 включает в себя выходной интерфейс IS3, который подключен к входному интерфейсу IE4 модуля 24 актуализации индикатора IND исправности, функция которого заключается в указании неисправности.
Индикатор IND изменяется между двумя пределами, например 0 и 100. Одно из значений, значение 100, указывает на то, что датчик работает нормально, а другое значение, значение 0, указывает, что датчик неисправен.
Модуль 24 изменяет значение индикатора IND между его пределами, в зависимости от значения суммы St, предоставленного модулем 23. Более конкретно, актуализация индикатора включает в себя изменение значения индикатора в зависимости от расстояния до нуля ранее рассчитанной суммы.
Эта сумма близка к нулю, когда датчик работает нормально, и удаляется от нуля в случае неплотного контакта. Таким образом, значение индикатора изменяется в зависимости от нормальной работы датчика или от наличия неплотного контакта.
Индикатор IND инициализируется значением 100. Индикатор IND сильно уменьшается, если сумма St указывает неисправность периодического характера, то есть, если сумма St удалена от нуля. Индикатор IND слабо увеличивается, если сумма St указывает нормальную работу датчика, то есть, если сумма St близка к нулю.
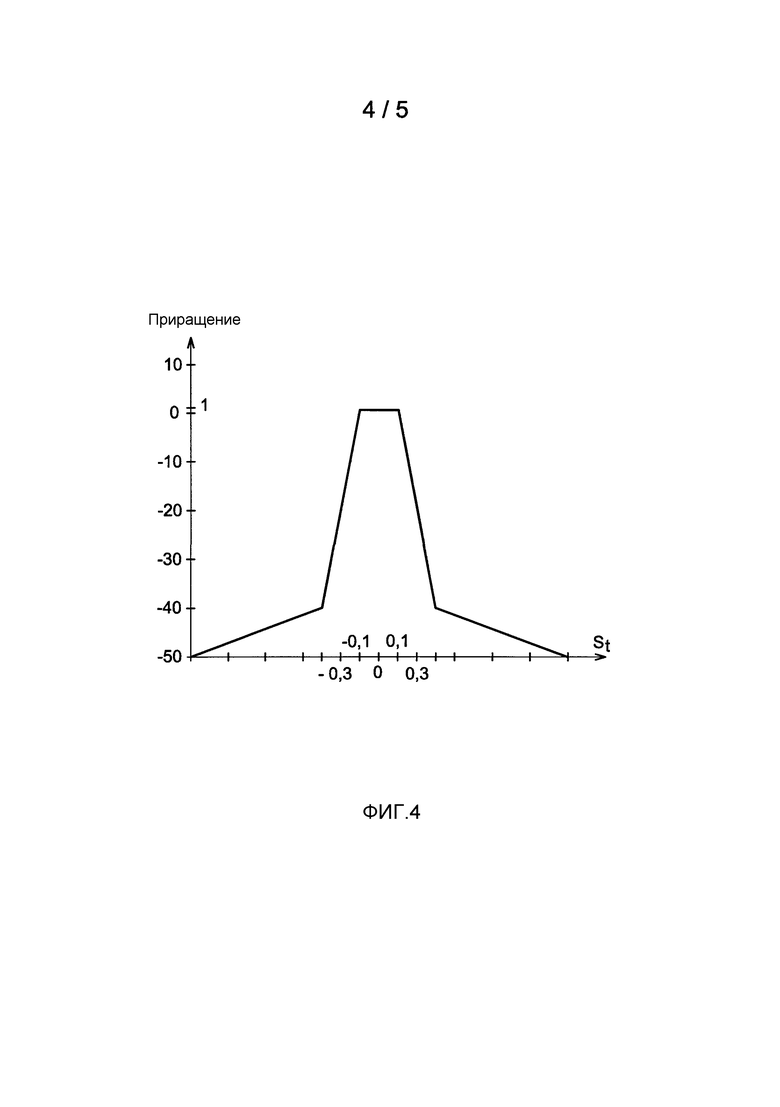
Например, увеличение индикатора IND выполняется в соответствии с приращением, таким как показано на фиг.4.
Для суммы St, содержащейся между -0,1 и 0,1, приращение будет 1.
Для суммы St, содержащейся между +0,1 и +0,3 или между -0,1 и -0,3, приращение линейно уменьшается от 1 до -40.
Для суммы St, содержащейся между +0,3 и 1 или между -0,3 и -1, приращение линейно уменьшается от -40 до -50.
Приращение добавляется к индикатору IND, сохраняя последний в его границах, т.е. приращение не добавляется, или добавляется лишь частично, если индикатор достигает одной из своих границ.
Следует также отметить, что показатель IND может быть заморожен, когда он достигает нуля. Считается, что в данном случае датчик слишком деградировал. Даже если неплотность контакта впоследствии уменьшится, датчик не может быть вновь повторно объявлен работоспособным. Другими словами, заморозка индикатора в нуле препятствует любой реабилитации LVDT-датчика.
Разумеется, возможны другие законы изменения приращения индикатора IND в соответствии с суммой St. Кривая может состоять из линейных сегментов в больших или меньших количествах. Кривая также может быть колоколообразной или еще гауссовой.
Модуль 24 содержит выходной интерфейс IS4, который подключен к входному интерфейсу IE5 модуля 25 определения статуса работоспособности датчика. Это определение основано на сравнении индикатора IND с по меньшей мере одним заранее определенным порогом.
Преимущественно, сравнение индикатора предполагает сравнение с первым порогом и со вторым порогом, так что переход от состояния нормального функционирования к состоянию неисправности осуществляется для значения, отличного от величины для обратного перехода.
Индикатор IND задается в 100, если он затем остается выше первого порога, называемого нижним порогом, равным, например, 50, датчик объявляется нормально функционирующим. Если индикатор IND становится меньше, чем первый порог, детектируется неисправность датчика типа неплотного контакта.
Индикатор IND, бывший ниже первого порога, если он остается затем ниже второго порога, называемого верхним порогом, больше, чем первый порог, равного, например, 90, датчик продолжает считаться неисправным. Если индикатор IND становится больше, чем второй порог, датчик объявляется нормально функционирующим.
Эта работа по гистерезису позволяет избежать периодического определения неисправности. Разумеется, в упрощенном виде, можно использовать только один порог, или, другими словами, выбрать одинаковые нижний и верхний пороги.
Конечно, устройство контроля может контролировать множество LVDT-датчиков, включенных в измерительную цепь.
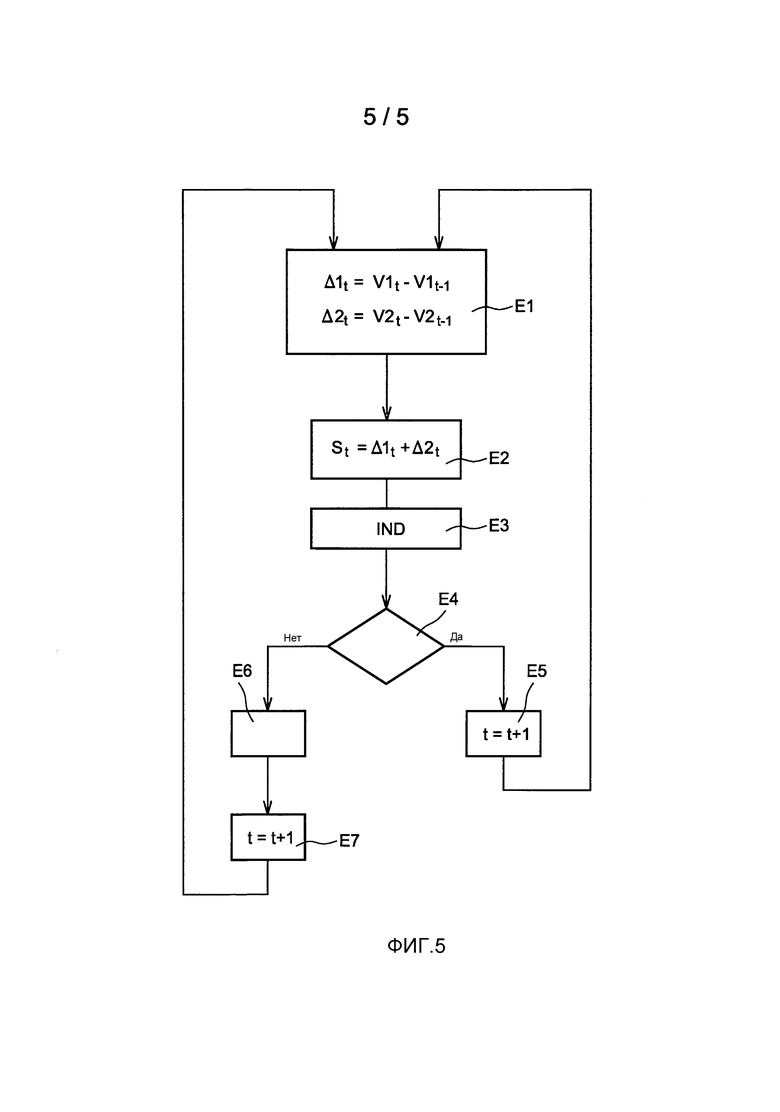
Работа устройства контроля LVDT-датчика описана со ссылкой на фиг. 5, в виде блок-схемы, содержащей этапы с E1 по E7.
Этапы с E1 по E7 выполняются многократно, например, с заданной частотой, соответствующей частоте измерения напряжений V1 и V2 LVDT-датчика. Шаг по времени, например, 15 мс.
Этап Е1 - расчет разности между напряжением, измеренным в текущий момент, и напряжением, измеренным в предыдущий момент времени, для каждой из двух вторичных обмоток:
Δ1t=V1t-V1t-i
Δ2t=V2t-V2t-i
Следующий этап Е2 - расчет суммы рассчитанных ранее разностей:
St=Δ1t+Δ2t
Следующий этап E3 - актуализация индикатора IND исправности, функция которого - указать неисправность.
Индикатор IND изменяется между двумя границами, например 0 и 100. Одно из значений, значение 100, указывает на то, что датчик работает нормально, а другое значение, значение 0, указывает, что датчик неисправен.
Этап E3 изменяет значение индикатора IND между его границами, в зависимости от значения суммы St, рассчитанной на предыдущем этапе. Точнее, актуализация индикатора состоит в изменении значения индикатора в зависимости от расстояния до нуля ранее рассчитанной суммы.
Эта сумма близка к нулю, когда датчик работает нормально, и удаляется от нуля в случае неплотного контакта. Таким образом, значение индикатора изменяется на этапе E3 в зависимости от нормальной работы датчика или наличия неплотного контакта.
Индикатор IND инициализируется значением 100. Индикатор IND сильно уменьшается, если сумма St указывает на периодический характер неисправности, то есть, если сумма St удалена от нуля. Индикатор IND слабо увеличивается, если сумма St указывает на нормальную работу датчика, то есть, если сумма St близка к нулю.
Например, увеличение индикатора IND выполняется в соответствии с приращением, таким как показано на фиг. 4, описанной ранее.
Приращение применяется к индикатору IND, поддерживая его между его границами, т.е. приращение не применяется или применяется лишь частично, если индикатор достигает одной из своих границ.
Можно принять, что индикатор остается неподвижным в нулевом значении, если он его достиг, для предотвращения впоследствии переквалификации испорченного LVDT-датчика как работоспособного.
Конечно, возможны другие законы изменения приращения индикатора IND, в соответствии с суммой St. Кривая может состоять из линейных сегментов в больших или меньших количествах. Кривая также может быть колоколообразной или еще гауссовой.
Следующий этап Е4 - определение статуса пригодности датчика. Это определение основано на сравнении индикатора IND с по меньшей мере одним заранее определенным порогом.
Предпочтительно, сравнение индикатора состоит в сравнении с первым порогом и со вторым порогом, так что переход из состояния нормального функционирования в состояние неисправности осуществляется для значения, отличного от значения обратного перехода.
Индикатор IND задается в 100, если он затем остается выше первого порога, называемого нижним порогом, равного, например, 50, датчик называется нормально функционирующим. Если индикатор IND становится меньше, чем первое пороговое значение, детектируется неисправность датчика типа неплотного контакта.
Индикатор IND, бывший ниже первого порога, если он остается затем ниже второго порога, называемого верхним порогом, больше чем первый порог, равного, например, 90, датчик продолжает считаться неисправным. Если индикатор IND становится больше чем второй порог, датчик объявляется нормально функционирующим.
Эта работа по гистерезису позволяет избежать прерывистого определения неисправности. Разумеется, в упрощенном виде, можно использовать только один порог, или, другими словами, выбрать одинаковые нижний и верхний пороги.
Если датчик объявляется нормально функционирующим, то за этапом Е4 следует этап E5, при котором параметр времени увеличивается на один шаг. За этапом Е5 следует этап E1, описанный ранее, осуществляемый в следующий шаг времени.
Если датчик объявлен как затронутый неисправностью типа неплотного контакта, то за этапом Е4 следует этап Е6, при котором создается предупреждение для присвоения метки "недействительно" значениям напряжения V1t и V2t, измеренным в момент t. Вычислительное устройство 2 может затем отбросить эти значения из дальнейшей обработки.
На следующем этапе Е7, временной параметр увеличивается на один шаг. За этапом Е7 следует этап E1, описанный выше, осуществляемый в следующий шаг времени.
Способ согласно изобретению может быть реализован по мере получения измерений, или, альтернативно, он может быть реализован на множестве ранее измеренных и сохраненных значений.
Изобретение может быть реализовано в дополнение к известным тестам достоверности, таким как электрический тест, тест правдоподобия и тест отклонения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА КОНТУРА ОБРАТНОЙ СВЯЗИ ПРИВОДНОЙ СИСТЕМЫ ПЕРЕМЕННЫХ ГЕОМЕТРИЙ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2580194C2 |
| УСТРОЙСТВО ИНДИКАТОРА ВЫСОКОГО НАПРЯЖЕНИЯ | 2023 |
|
RU2801618C1 |
| Многофункциональный пороговый модуль с кодовой перестройкой логики | 1972 |
|
SU474108A1 |
| ВЕРИФИКАЦИЯ ТОКА КОНТУРА УПРАВЛЕНИЯ ПРОЦЕССА | 2006 |
|
RU2413307C2 |
| СИСТЕМА МОНИТОРИНГА ИЗМЕРИТЕЛЬНОЙ СХЕМЫ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2601669C2 |
| Устройство для контроля напряжения аккумуляторной батареи | 1989 |
|
SU1642538A2 |
| Устройство контроля работоспособности электромагнитного исполнительного механизма постоянного тока | 1987 |
|
SU1529270A1 |
| Выпрямитель с защитой | 1985 |
|
SU1246287A1 |
| Мост для измерения активного сопротивления электрических цепей,находящихся под напряжением переменного тока | 1983 |
|
SU1150558A1 |
| Устройство для измерения давления | 1990 |
|
SU1831668A3 |
Способ контроля LVDT-датчика, включающего в себя две вторичные цепи, отличающийся тем, что он состоит из итеративных этапов, на которых: рассчитывают (E1) разность между напряжениями на клеммах одной из вторичных цепей в данный момент времени и в предшествующий момент времени, рассчитывают (E1) разность между напряжениями на клеммах другой вторичной цепи в данный момент времени и в предшествующий момент времени, рассчитывают (E2) сумму двух ранее рассчитанных разностей, изменяют (E3) значение индикатора в зависимости от расстояния до нуля ранее рассчитанной суммы и сравнивают (E4) индикатор с по меньшей мере заранее определенным порогом. Техническим результатом при реализации заявленного способа является повышение точности определения неисправности. 5 н. и 3 з.п. ф-лы, 5 ил.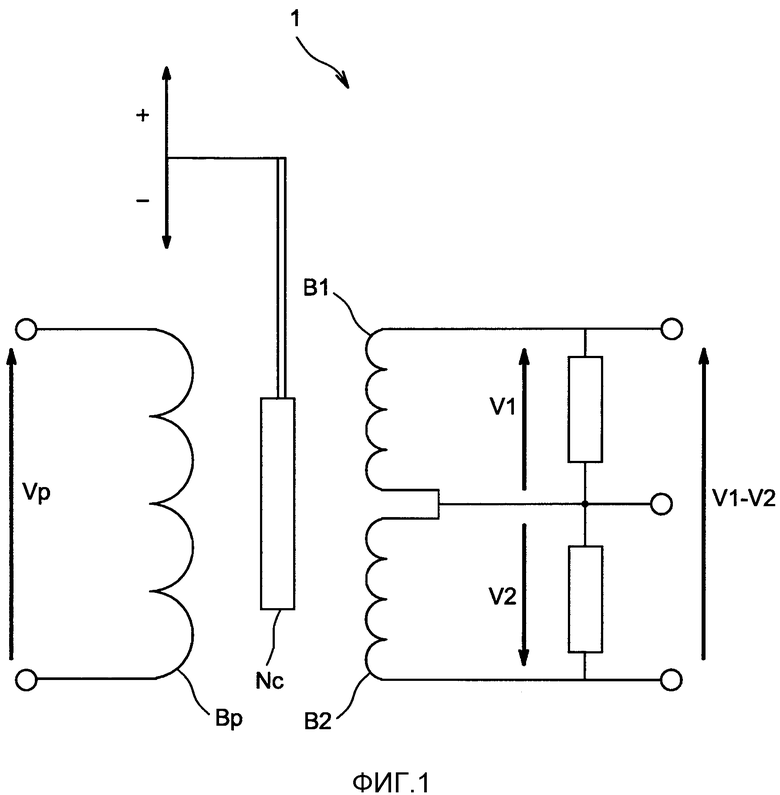
1. Способ контроля датчика (1) типа линейного переменного дифференциального трансформатора, включающего в себя две вторичные цепи (B1, В2), в которых соответственно индуцируют напряжение, линейно изменяющееся в зависимости от перемещения сердечника, отличающийся тем, что он включает в себя итеративные этапы, на которых:
- рассчитывают (Е1) разность между напряжениями на клеммах одной из вторичных цепей в данный момент времени и в предшествующий момент времени,
- рассчитывают (Е1) разность между напряжениями на клеммах другой из вторичных цепей в данный момент времени и в предшествующий момент времени,
- рассчитывают (Е2) сумму двух ранее рассчитанных разностей,
- изменяют (Е3) значение индикатора неисправности датчика в зависимости от расстояния до нуля ранее рассчитанной суммы, и
- сравнивают (Е4) упомянутый индикатор с по меньшей мере заранее определенным порогом.
2. Способ контроля по п. 1, отличающийся тем, что упомянутый индикатор изменяется между двумя границами, одна из которых обозначает, что датчик функционирует нормально, а другая обозначает, что датчик неисправен.
3. Способ контроля по п. 1, отличающийся тем, что изменение (Е3) упомянутого индикатора включает в себя увеличение индикатора, если сумма близка к нулю, и уменьшение индикатора, если сумма удалена от нуля.
4. Способ контроля по любому из пп. 1-3, отличающийся тем, что сравнение индикатора включает в себя сравнение с первым порогом и со вторым порогом, так что переход от состояния нормального функционирования к состоянию неисправности осуществляется для значения, отличного от значения обратного перехода.
5. Устройство контроля датчика типа линейного переменного дифференциального трансформатора, имеющего две вторичные цепи, в которых соответственно индуцируется напряжение, изменяющееся линейно в зависимости от перемещения сердечника, отличающееся тем, что оно содержит:
- средство (21) расчета разности между напряжениями на клеммах одной из вторичных цепей в данный момент времени и в предшествующий момент времени,
- средство (22) расчета разности между напряжениями на клеммах другой из вторичных цепей в данный момент времени и в предшествующий момент времени,
- средство (23) расчета суммы двух разностей, вычисленных ранее,
- средство (24) изменения индикатора неисправности датчика в зависимости от расстояния до нуля рассчитанной ранее суммы, и
- средство (25) сравнения упомянутого индикатора с по меньшей мере одним заданным порогом.
6. Измерительная цепь, включающая в себя датчик типа линейного переменного дифференциального трансформатора, имеющего две вторичные цепи, в которых, соответственно, индуцируется напряжение, изменяющееся линейно в зависимости от перемещения сердечника, и устройство контроля по п. 5.
7. Читаемый компьютером носитель, на котором записана компьютерная программа, включающая в себя инструкции для осуществления этапов способа по любому из пп. 1-4.
| US7138794 B1, 21.11.2006 | |||
| DE10036935 A1, 07.02.2002 | |||
| US 4047086 A 06.09.1977. |

