Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения цели и к способу обнаружения цели.
Уровень техники
[0002] Традиционно известна система обработки изображений, которая обнаруживает дорожный знак из данных изображений по окружению впереди транспортного средства (патентный документ 1). Патентный документ 1 обнаруживает позицию и ориентацию транспортного средства, чтобы за счет этого прогнозировать позицию дорожного знака, определяет область обработки изображений в данных изображений на основе прогнозной позиции и обнаруживает дорожный знак из области обработки изображений. Система обработки изображений за счет этого уменьшает нагрузку по обработке изображений.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2007-241469
Сущность изобретения
Техническая задача
[0004] Тем не менее, система обработки изображений патентного документа 1 не рассматривает ошибку в обнаруженной позиции и ориентации транспортного средства при определении области обработки изображений. На ошибку значительное влияние оказывает окружающая ситуация транспортного средства. Если ошибка является большой, то дорожный знак должен находиться за пределами области обработки изображений и в силу этого должен быть необнаруживаемым. С другой стороны, задание чрезмерно большой области обработки изображений повышает вероятность ошибочного обнаружения объекта, отличного от дорожного знака.
[0005] Настоящее изобретение осуществлено с учетом вышеуказанных обстоятельств и имеет цель в предоставлении устройства обнаружения цели и способа обнаружения цели, допускающих точное обнаружение цели.
Решение задачи
[0006] Устройство обнаружения цели согласно аспекту настоящего изобретения получает изображение посредством формирования изображений окрестности транспортного средства, обнаруживает собственную позицию транспортного средства на основе величины перемещения транспортного средства относительно начальной позиции транспортного средства и оценивает относительную позицию цели, которая расположена около транспортного средства, относительно транспортного средства на основе собственной позиции и информации относительно позиции цели на карте. Устройство обнаружения цели задает область обнаружения для цели внутри изображения на основе относительной позиции цели относительно транспортного средства и обнаруживает цель из области обнаружения. Устройство обнаружения цели оценивает ошибку, содержащуюся в собственной позиции, на основе величины перемещения транспортного средства относительно начальной позиции, и регулирует размер области обнаружения для цели согласно ошибке.
Краткое описание чертежей
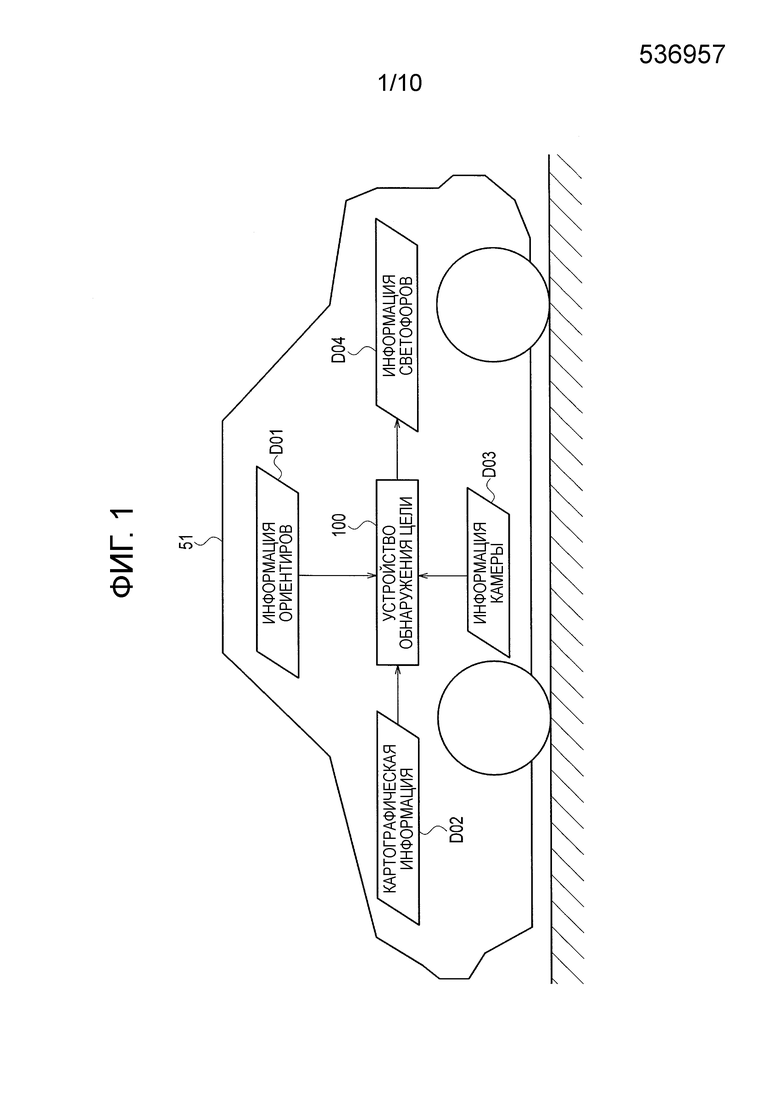
[0007] Фиг. 1 является блок-схемой, иллюстрирующей информацию, вводимую и выводимую из устройства 100 обнаружения цели согласно варианту осуществления.
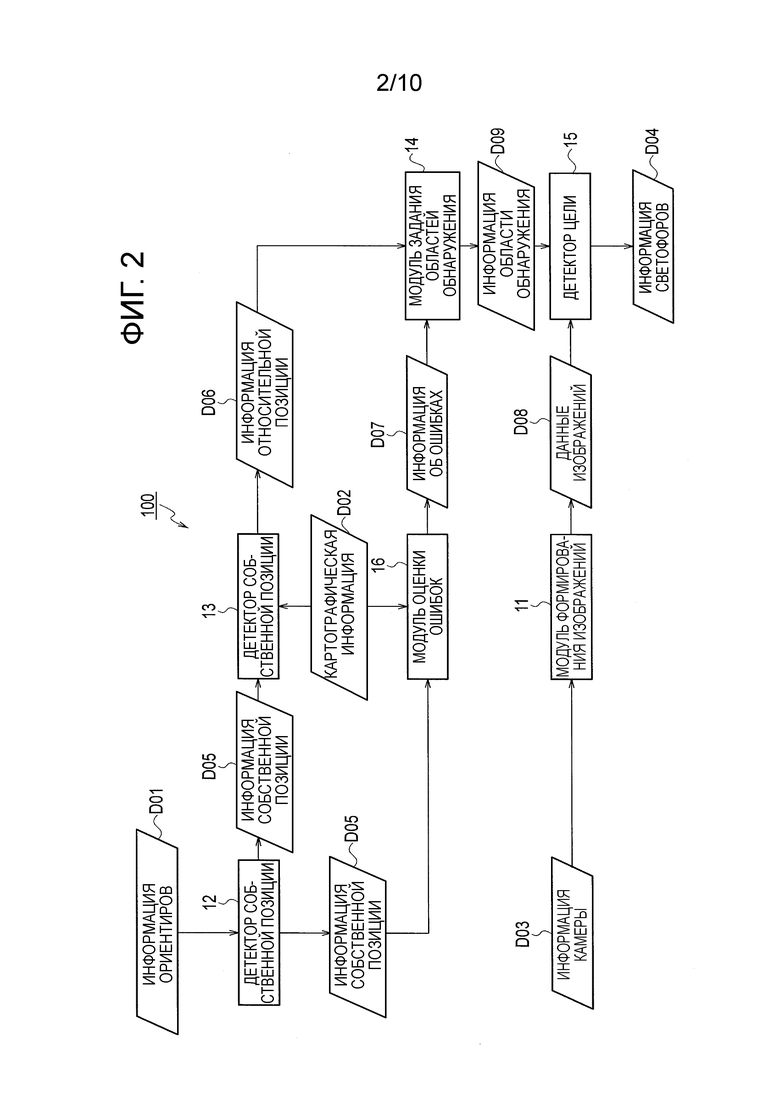
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию устройства 100 обнаружения цели согласно варианту осуществления и поток данных в нем.
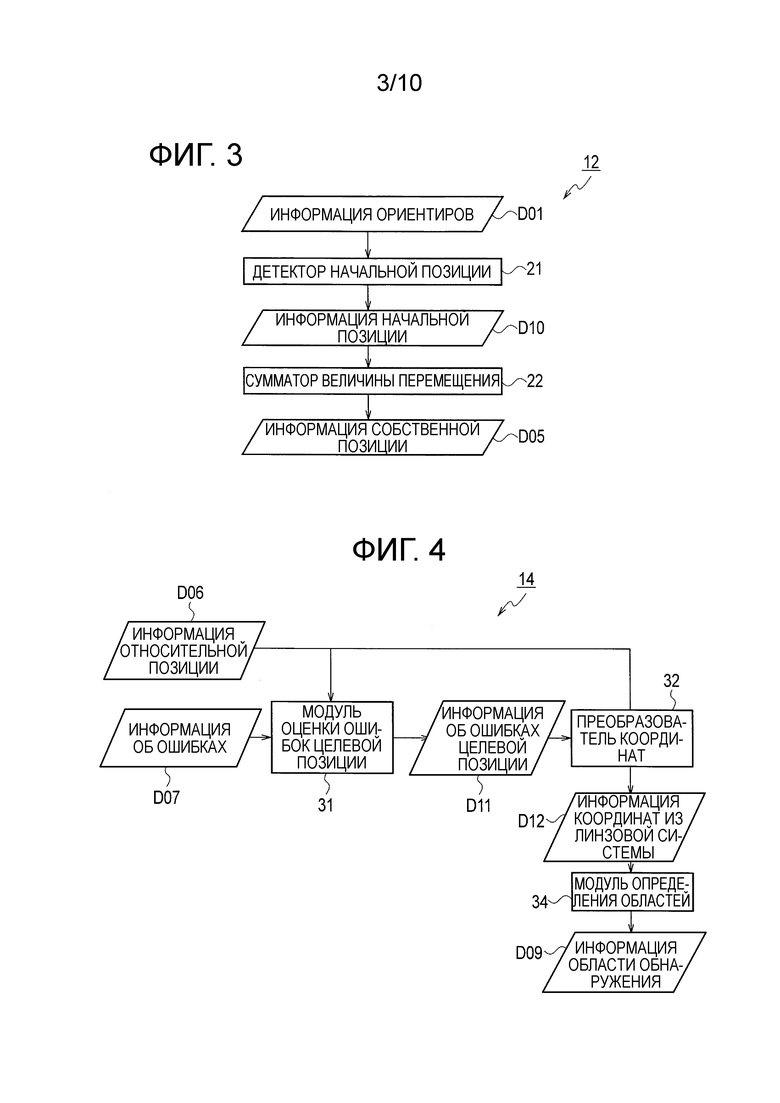
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию детектора 12 собственной позиции на фиг. 2 и поток данных в нем.
Фиг. 4 является блок-схемой, иллюстрирующей конфигурацию модуля 14 задания областей обнаружения на фиг. 2 и поток данных в нем.
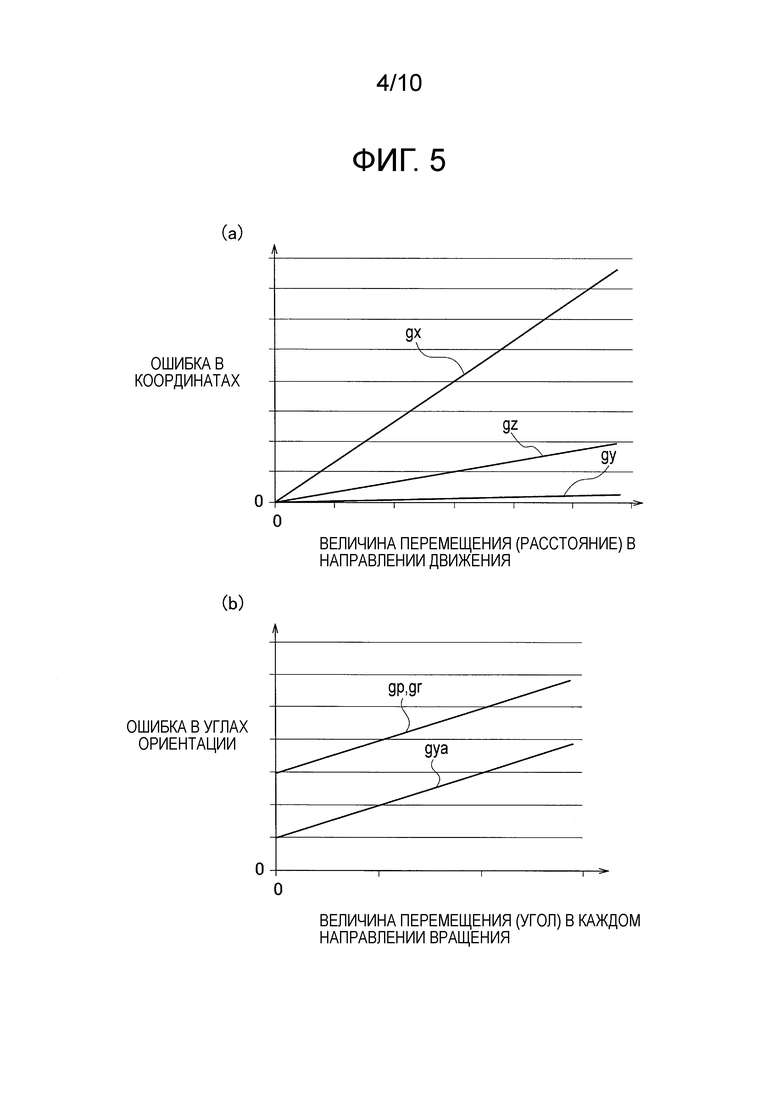
Фиг. 5(a) является графиком, показывающим взаимосвязь между ошибками в координатах транспортного средства 51 и величиной (расстоянием), на которую транспортное средство 51 перемещается от наземного ориентира в направлении движения, а фиг. 5(b) является графиком, показывающим взаимосвязь между величиной (углом), на которую транспортное средство 51 перемещается от наземного ориентира в каждом направлении вращения (направлении крена, продольном направлении, направлении относительно вертикальной оси), и ошибками в ориентации транспортного средства 51.
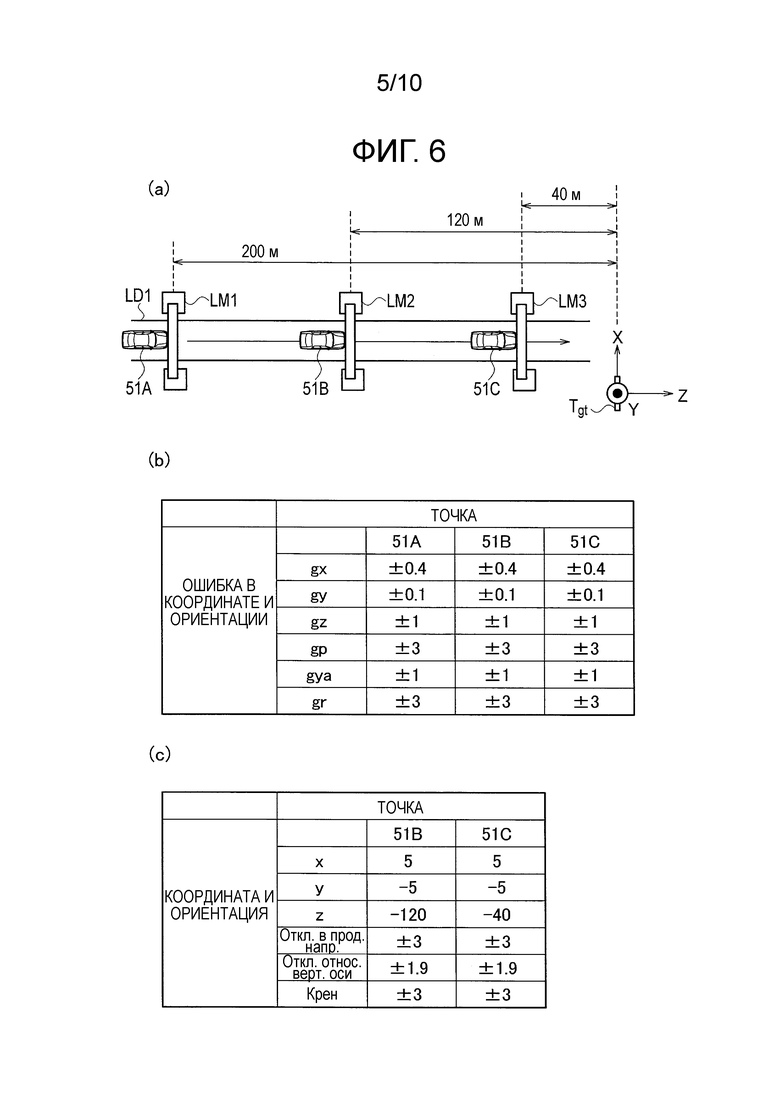
Фиг. 6(a) является схемой, показывающей транспортные средства 51A-51C, движущиеся на прямой дороге LD1, рядом с которой расположены наземные ориентиры LM1-LM3, фиг. 6(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок, а фиг. 6(c) является таблицей, показывающей собственные позиции, обнаруженные посредством детектора 12 собственной позиции.
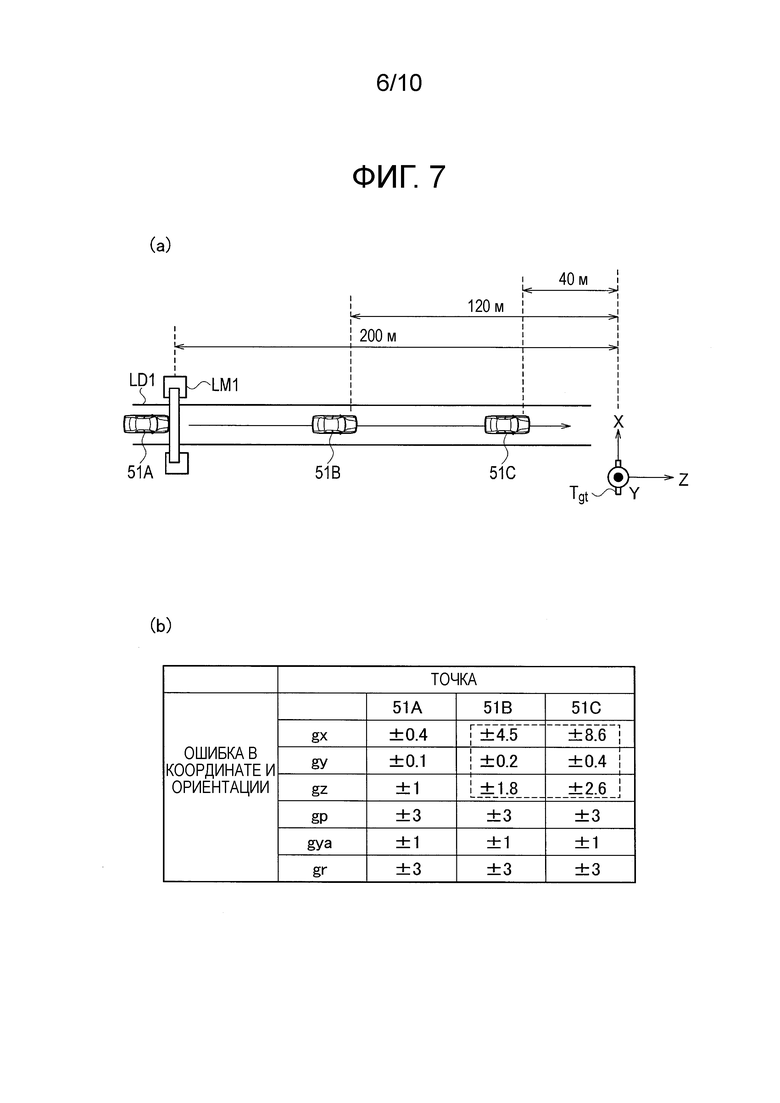
Фиг. 7(a) является схемой, показывающей транспортные средства 51A-51C, движущиеся на прямой дороге LD1, рядом с которой расположен наземный ориентир LM1, а фиг. 7(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок.
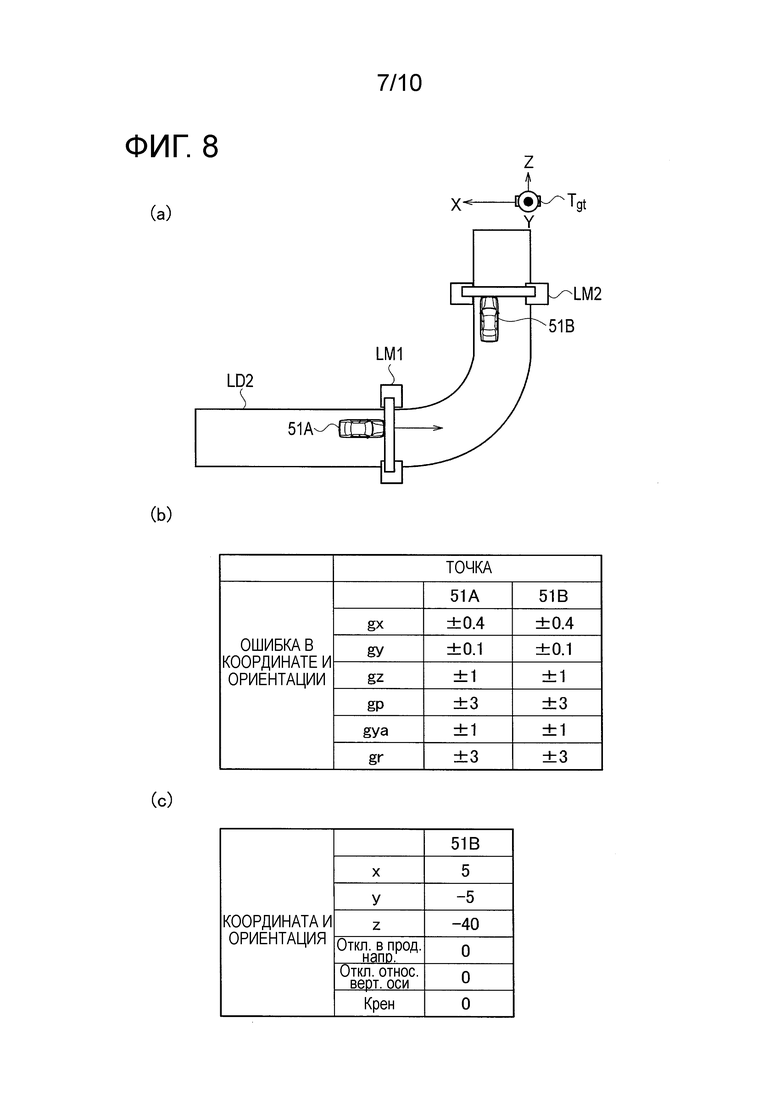
Фиг. 8(a) является схемой, показывающей транспортные средства 51A и 51B, движущиеся на искривленной дороге LD2, рядом с которой расположены наземные ориентиры LM1 и LM2, фиг. 8(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок, а фиг. 8(c) является таблицей, показывающей собственные позиции, обнаруженные посредством детектора 12 собственной позиции.
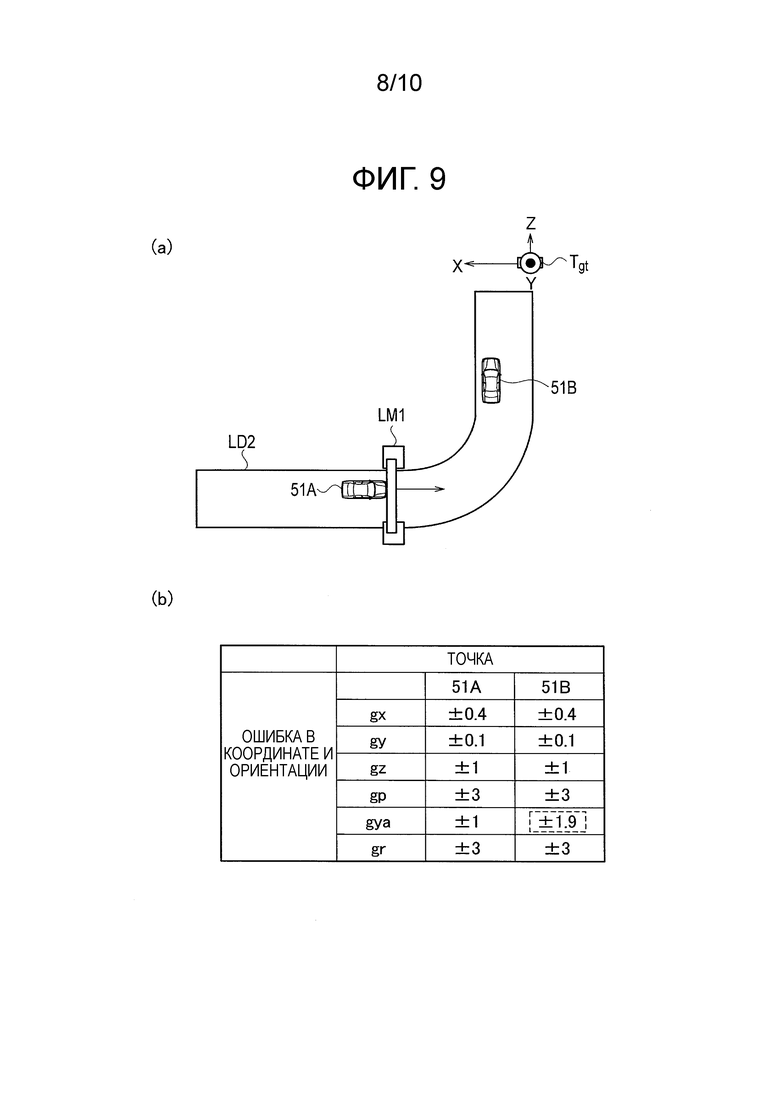
Фиг. 9(a) является схемой, показывающей транспортные средства 51A и 51B, движущиеся на искривленной дороге LD2, рядом с которой расположен наземный ориентир LM1, а фиг. 9(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок.
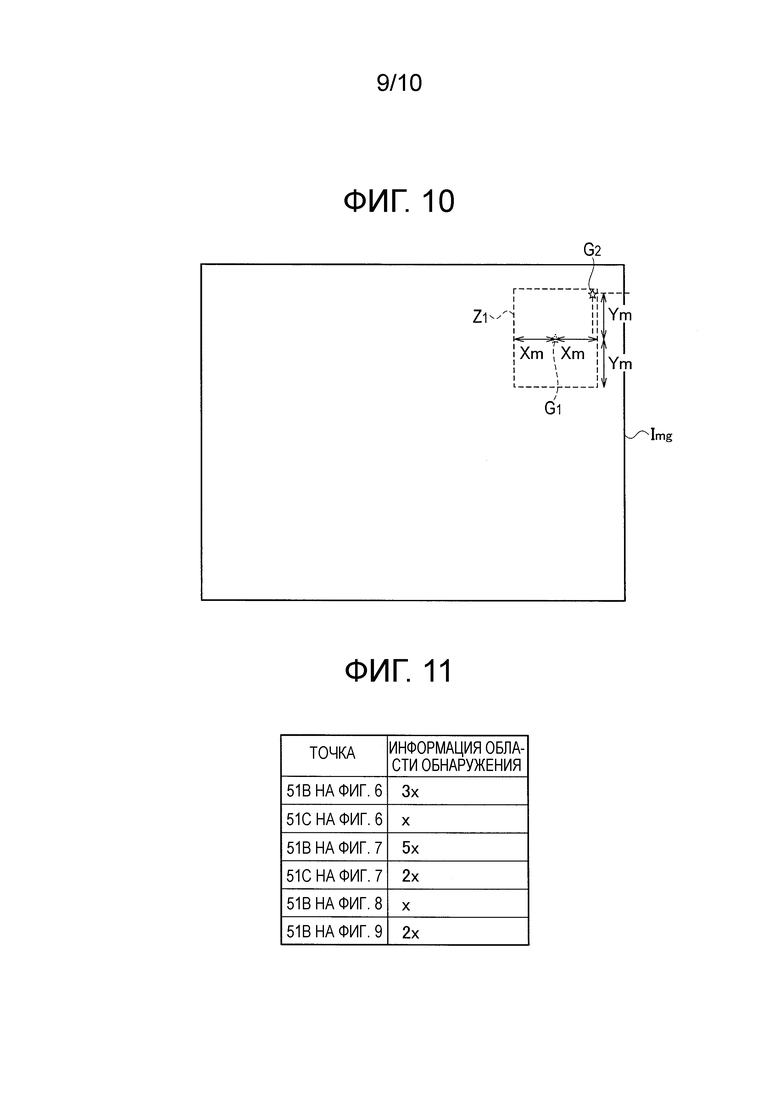
Фиг. 10 является видом сверху, показывающим двумерную систему (xl, yl) координат в изображении (Img), включающую в себя целевые координаты (G1), предположительно не содержащие ошибки, и целевые координаты (G2), предположительно содержащие максимальные ошибки.
Фиг. 11 является таблицей, сравнивающей размеры области (Z1) обнаружения, показанной на фиг. 10.
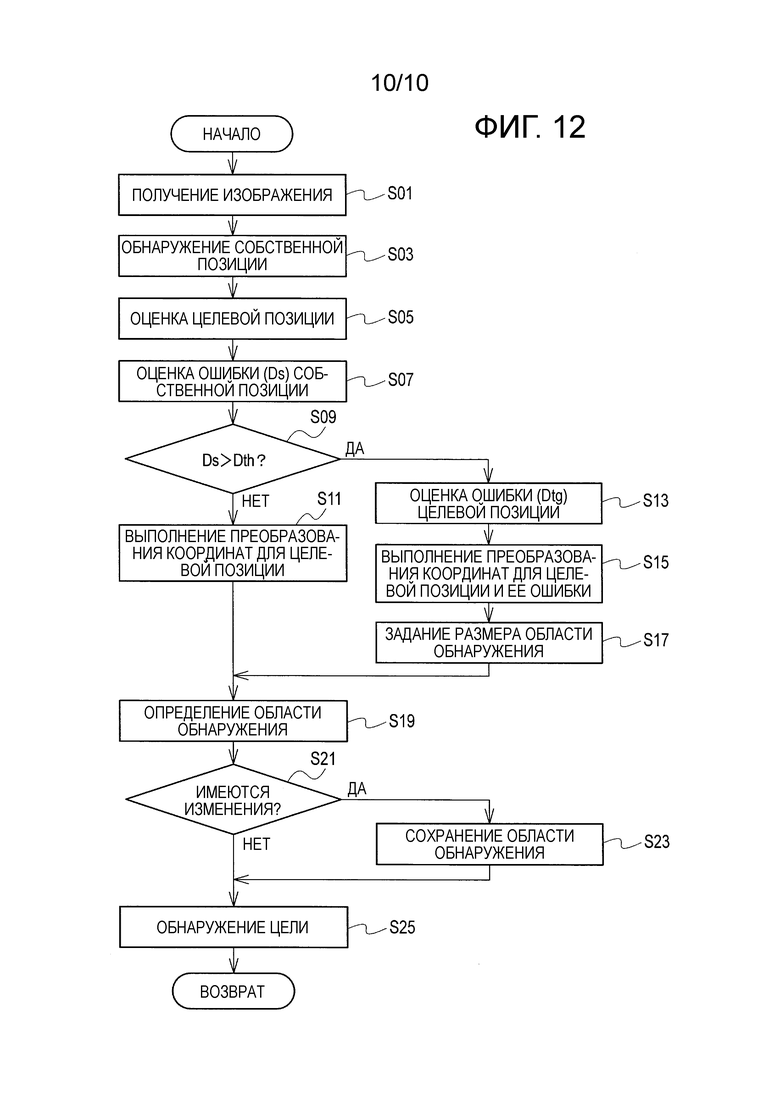
Фиг. 12 является блок-схемой последовательности операций, показывающей пример способа обнаружения цели с использованием устройства 100 обнаружения цели.
Подробное описание вариантов осуществления
[0008] Ниже описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. Идентичные компоненты обозначаются посредством идентичных ссылок с номерами и не описываются с тем, чтобы не допускать повторяющегося описания.
[0009] Первый вариант осуществления
Со ссылкой на фиг. 1, приводится описание информации, вводимой и выводимой из устройства 100 обнаружения цели настоящего варианта осуществления. Устройство 100 обнаружения цели обнаруживает цель, размещенную около дороги, из изображения, снятого посредством модуля формирования изображений (камеры), смонтированного в транспортном средстве 51. Цель фиксированно установлена на земле и включает в себя, например, светофор и дорожный знак. В вариантах осуществления в данном документе, светофор используется в качестве примера.
[0010] Устройство 100 обнаружения цели принимает ввод картографической информации D02, информации D01 ориентиров и информации D03 камеры. Картографическая информация D02 содержит позиционную информацию относительно цели, в которой позиция на карте и позиция в фактическом окружении ассоциированы друг с другом заранее. Информация D01 ориентиров используется для того, чтобы вычислять собственную позицию транспортного средства 51 в фактическом окружении. Ориентиры включают в себя характеристический объект на земле (наземные ориентиры) и спутник глобальной системы позиционирования (GPS), который передает GPS-сигналы, принимаемые посредством транспортного средства 51. В первом варианте осуществления, наземный ориентир используется в качестве примера. Информация D01 ориентиров содержит, например, позиционную информацию относительно наземных ориентиров. Информация D03 камеры используется для того, чтобы извлекать изображение окрестностей (например, впереди) транспортного средства 51 из модуля формирования изображений. На основе этих фрагментов информации D01-D03 устройство 100 обнаружения цели выводит результат распознавания светофора, который является примером цели, в качестве информации D04 светофоров.
[0011] Со ссылкой на фиг. 2, описывается конфигурация устройства 100 обнаружения цели согласно настоящему варианту осуществления и поток данных в нем. Устройство 100 обнаружения цели включает в себя модуль 11 формирования изображений, детектор 12 собственной позиции, модуль 13 оценки целевой позиции, модуль 14 задания областей обнаружения, детектор 15 цели и модуль 16 оценки ошибок.
[0012] Модуль 11 формирования изображений монтируется в транспортном средстве 51 и получает изображение посредством формирования изображений окрестности транспортного средства 51. Модуль 11 формирования изображений представляет собой камеру, включающую в себя твердотельный элемент съемки изображений, например, CCD и CMOS, и получает изображение, для которого может выполняться обработка изображений. Модуль 11 формирования изображений задает свой угол обзора для изображения и вертикальный и горизонтальный ракурс камеры на основе информации D03 камеры и выводит полученное изображение в качестве данных D08 изображений.
[0013] Детектор 12 собственной позиции обнаруживает собственную позицию транспортного средства 51 на основе величины перемещения транспортного средства 51 относительно его начальной позиции в картографической информации D02, причем начальная позиция основана на информации D01 ориентиров. Информация D01 ориентиров указывает, например, относительную позицию наземного ориентира (магазина, достопримечательности или экскурсионного пункта), обнаруженного посредством датчика, такого как бортовая камера или лазерный радар, относительно транспортного средства 51. В картографической информации D02 предварительно регистрируется позиционная информация относительно наземного ориентира. Детектор 12 собственной позиции может обнаруживать собственную позицию транспортного средства 51 посредством сверки информации D01 ориентиров и информации относительной позиции для наземного ориентира между собой. В данном документе "позиция" включает в себя координаты и ориентацию. Более конкретно, позиция наземного ориентира включает в себя координаты и ориентацию наземного ориентира, и позиция транспортного средства 51 включает в себя координаты и ориентацию транспортного средства 51. В качестве информации D05 собственной позиции детектор 12 собственной позиции выводит координаты (x, y, z), представленные в опорной системе координат, и компоненты ориентации (наклон в продольном направлении, наклон относительно вертикальной оси и крен) в направлениях вращения соответствующих осей координат.
[0014] Модуль 13 оценки целевой позиции оценивает относительную позицию цели относительно транспортного средства 51 на основе картографической информации D02 и информации D05 собственной позиции. В картографической информации D02 предварительно регистрируется позиционная информация (информация координат) для цели. Относительные координаты цели для транспортного средства могут получаться из координат цели и координат и ориентации транспортного средства 51. Модуль 13 оценки целевой позиции выводит оцененные относительные координаты цели в качестве информации D06 относительной позиции.
[0015] Модуль 16 оценки ошибок оценивает ошибки, содержащиеся в собственной позиции, обнаруженной посредством детектора 12 собственной позиции, на основе величины перемещения транспортного средства относительно начальной позиции. Ниже приводится подробное описание модуля 16 оценки ошибок со ссылкой на фиг. 5-9.
[0016] Модуль 14 задания областей обнаружения задает область обнаружения цели внутри изображения на основе относительной позиции цели. Поскольку модуль 11 формирования изображений крепится на транспортном средстве 51, позиция в изображении, в которой с большой вероятностью формируется изображение цели, может указываться внутри изображения, когда определяется угол обзора модуля 11 формирования изображений. На основе этой позиции в изображении модуль 14 задания областей обнаружения определяет область обнаружения цели внутри изображения.
[0017] Модуль 14 задания областей обнаружения регулирует размер области обнаружения цели согласно ошибкам, оцененным посредством модуля 16 оценки ошибок. Модуль 14 задания областей обнаружения выводит область обнаружения, заданную и отрегулированную таким способом, в качестве информации D09 области обнаружения. Ниже приводится подробное описание модуля 14 задания областей обнаружения со ссылкой на фиг. 10 и 11.
[0018] Детектор 15 цели обнаруживает цель из области обнаружения, заданной и отрегулированной. В частности, детектор 15 цели выполняет обработку изображений для обнаружения цели для данных D08 изображений в области обнаружения. Способ обработки изображений не ограничен. В примере, в котором цель представляет собой светофор, сигнал светофора может обнаруживаться с использованием обработки синхронного обнаружения на основе переменного цикла сетей общего пользования или с использованием обработки определения подобия оттенков и форм. Другая известная обработка изображений также может использоваться для обнаружения цели. Выполнение обработки изображений не для всех данных D08 изображений, а только для их части (области обнаружения) уменьшает нагрузку по обработке информации для обнаружения цели, обеспечивая возможность быстрого обнаружения цели. Детектор 15 цели выводит результат обнаружения цели в качестве информации D04 цели.
[0019] Детектор 12 собственной позиции, модуль 13 оценки целевой позиции, модуль 16 оценки ошибок, модуль 14 задания областей обнаружения и детектор 15 цели могут реализовываться с использованием микроконтроллера, имеющего CPU, запоминающее устройство и модуль ввода и вывода. В частности, CPU выполняет предварительно установленные компьютерные программы для того, чтобы реализовывать несколько информационных процессоров (12-16) в микроконтроллере. Часть запоминающего устройства в микроконтроллере формирует картографическую базу данных, сохраняющую картографическую информацию D02. Микроконтроллер также может использоваться в качестве ECU, используемого для других видов управления транспортным средством (например, для управления автономным вождением).
[0020] Со ссылкой на фиг. 3, описываются конфигурация детектора 12 собственной позиции, показанного на фиг. 2, и поток данных. Детектор 12 собственной позиции включает в себя детектор 21 начальной позиции и сумматор 22 величины перемещения. Детектор 21 начальной позиции обнаруживает начальную позицию транспортного средства 51 с использованием информации D01 ориентиров. Начальная позиция представляет собой позицию, на основе которой собственная позиция транспортного средства 51 является обнаруживаемой, и представляет собой позицию, т.е. координаты и ориентацию, транспортного средства 51, которая может непосредственно получаться из информации D01 ориентиров. Альтернативно, предусмотрен случай, в котором устройство определения позиции транспортного средства размещено рядом с дорогой, чтобы обнаруживать позиции транспортных средств, движущихся в пределах этого участка дороги, обеспечивая возможность получения позиционной информации относительно транспортного средства 51 через связь между транспортным средством и дорожной инфраструктурой и т.п. В таком случае детектор 21 начальной позиции может получать позицию, на основе которой собственная позиция транспортного средства 51 является обнаруживаемой, посредством приема позиции транспортного средства 51 из придорожного устройства определения позиции транспортного средства.
[0021] Сумматор 22 величины перемещения накапливаемо суммирует величину перемещения транспортного средства с начальной позицией, обнаруженной посредством детектора 21 начальной позиции, и за счет этого вычисляет собственную позицию транспортного средства 51. В случае, если, например, наземный ориентир обнаружен посредством датчика, детектор 12 собственной позиции обнаруживает информацию относительно начальной позиции в качестве информации D05 собственной позиции без накапливаемого суммирования величины перемещения транспортного средства. Когда наземный ориентир не обнаружен, детектор 12 собственной позиции выводит в качестве информации D05 собственной позиции информацию, полученную посредством накапливаемого суммирования величины перемещения транспортного средства с начальной позицией, которая обнаружена в прошлый раз. Способ, используемый для оценки величины перемещения транспортного средства, не ограничен, и может использоваться любой известный способ. Например, сумматор 22 величины перемещения может использовать одометр, радар, гироскопический датчик, датчик скорости относительно вертикальной оси и датчик угла поворота рулевого механизма, чтобы оценивать величину перемещения транспортного средства, т.е. величину изменения координат и ориентации транспортного средства, в единицу времени.
[0022] В отношении конфигурации детектора 12 собственной позиции на фиг. 3, модуль 16 оценки ошибок на фиг. 2 оценивает ошибки в собственной позиции на основе величины перемещения транспортного средства 51, которая накапливаемо суммируется посредством сумматора 22 величины перемещения. Величина перемещения транспортного средства, оцененная посредством сумматора 22 величины перемещения, имеет более низкую точность, чем начальная позиция, обнаруженная с использованием ориентира. Когда такая величина перемещения транспортного средства накапливаемо суммируется с начальной позицией, ошибки, содержащиеся в собственной позиции, также накапливаемо суммируются. Таким образом, на ошибки, содержащиеся в собственной позиции транспортного средства, значительное влияние оказывает величина перемещения относительно начальной позиции, обнаруженной с использованием ориентира. Когда ошибки оцениваются на основе величины перемещения относительно начальной позиции, ошибки могут оцениваться точно. Ниже приводятся подробности означенного со ссылкой на фиг. 5-9.
[0023] Со ссылкой на фиг. 4, описываются конфигурация модуля 14 задания областей обнаружения на фиг. 2 и поток данных в нем. Модуль 14 задания областей обнаружения включает в себя модуль 31 оценки ошибок целевой позиции, преобразователь 32 координат и модуль 34 определения областей.
[0024] Модуль 31 оценки ошибок целевой позиции оценивает ошибки, которые должны вызываться в относительной позиции цели, посредством ошибок, содержащихся в собственной позиции. В частности, модуль 31 оценки ошибок целевой позиции принимает ввод информации D06 относительной позиции и информации D07 об ошибках. Затем модуль 31 оценки ошибок целевой позиции оценивает ошибки, которые должны вызываться в относительных координатах цели относительно транспортного средства 51, если ошибки, оцененные посредством модуля 16 оценки ошибок, вызываются в координатах и ориентации транспортного средства 51. Модуль 31 оценки ошибок целевой позиции выводит ошибки, которые должны вызываться в относительных координатах цели, в качестве информации D11 об ошибках целевой позиции.
[0025] Преобразователь 32 координат преобразует относительные координаты цели и их ошибки в координаты в изображении, в котором формируется изображение цели. В частности, преобразователь 32 координат принимает ввод информации D06 относительной позиции и информации D11 об ошибках целевой позиции. Затем на основе линзовой оптической системы в модуле 11 формирования изображений преобразователь 32 координат преобразует координаты цели в трехмерной системе (x, y, z) координат в координаты цели в изображении в двумерной системе (xl, yl) координат. Способ для преобразования координат не ограничен, и может использоваться любой известный способ. Преобразователь 32 координат выводит двумерные координаты цели, предположительно не содержащие ошибки, и двумерные координаты цели, предположительно содержащие максимальные ошибки, в качестве информации D12 координат из линзовой системы.
[0026] Модуль 34 определения областей определяет размер области обнаружения на основе разности между координатами, предположительно не содержащими ошибки, и координатами, предположительно содержащими максимальные ошибки, и определяет координаты центра области обнаружения на основе координат, предположительно не содержащих ошибки. Ниже приводятся подробности означенного со ссылкой на фиг. 10. Размер и центральные координаты области обнаружения выводятся в качестве информации D09 области обнаружения.
[0027] Со ссылкой на фиг. 5-9, приводится описание ошибок в собственной позиции, оцененной на основе величины перемещения транспортного средства 51, которая накапливаемо суммируется посредством сумматора 22 величины перемещения. Горизонтальная ось на фиг. 5(a) представляет величину перемещения транспортного средства 51 относительно начальной позиции в направлении движения (направлении по оси Z), а вертикальная ось на фиг. 5(a) представляет ошибки (gx, gy, gz), содержащиеся в координатах транспортного средства 51. В частности, gz обозначает ошибку в направлении движения транспортного средства 51, gx обозначает ошибку в направлении ширины транспортного средства 51 и gy обозначает ошибку в направлении высоты транспортного средства 51.
[0028] Ошибки (gx, gy, gz), содержащиеся в координатах транспортного средства 51, увеличиваются пропорционально величине перемещения относительно начальной позиции. Когда величина перемещения относительно начальной позиции является нулевой, ошибки (gx, gy, gz) также являются нулевыми. Следует отметить, что фиг. 5(a) не рассматривает ошибки, содержащиеся в начальной позиции, обнаруженной посредством детектора 21 начальной позиции. Координаты транспортного средства 51 вычисляются посредством накапливаемого суммирования величин изменения координат в единицу времени с начальной позицией. По этой причине, когда величина перемещения относительно начальной позиции является большей, большие величины изменения координат накапливаемо суммируются, увеличивая ошибки, которые должны содержаться в координатах транспортного средства 51. Относительно величины перемещения в направлении по оси Z (в направлении движения) ошибка (gx) в направлении ширины транспортного средства 51 является наибольшей и ошибка (gy) в направлении высоты транспортного средства является наименьшей.
[0029] Горизонтальная ось на фиг. 5(b) представляет величину перемещения транспортного средства 51 (величину углового изменения) в каждом направлении вращения (в направлении крена, продольном направлении и направлении относительно вертикальной оси) относительно начальной позиции, а вертикальная ось на фиг. 5(b) представляет ошибки (gr, gp, gya), содержащиеся в ориентации транспортного средства 51. В частности, gr обозначает ошибку в направлении крена транспортного средства 51, gp обозначает ошибку в продольном направлении транспортного средства 51 и gya обозначает ошибку в направлении относительно вертикальной оси транспортного средства 51.
[0030] Ошибки (gr, gp, gya), содержащиеся в ориентации транспортного средства 51, увеличиваются пропорционально величине изменения ориентации относительно ориентации транспортного средства 51 в начальной позиции (т.е. начальной ориентации). Когда величины изменения относительно начальной ориентации являются нулевыми, вызываются предварительно определенные ошибки (gr, gp, gya). Другими словами, фиг. 5(b) рассматривает ошибки, содержащиеся в начальной ориентации, обнаруженной посредством детектора 21 начальной позиции. Ориентация транспортного средства 51 вычисляется посредством накапливаемого суммирования величин изменения ориентации в единицу времени с начальной ориентацией. По этой причине, когда величины изменения относительно начальной ориентации являются большими, большие величины изменения ориентации накапливаемо суммируются, увеличивая ошибки (gr, gp, gya), которые должны содержаться в ориентации транспортного средства 51. Относительно величин изменения направлений вращения, ошибки (gr) в направлении крена и (gp) продольном направлении являются наибольшими и ошибка (gya) в направлении относительно вертикальной оси является наименьшей. Когда транспортное средство 51 вращается в направлении относительно вертикальной оси, вызывается только ошибка (gya) в направлении относительно вертикальной оси. То же верно для направления крена и продольного направления.
[0031] Далее описываются оценка ошибок посредством модуля 16 оценки ошибок и обнаружение собственной позиции посредством детектора 12 собственной позиции с использованием конкретных примеров форм дорог и наземных ориентиров, показанных на фиг. 6-9.
[0032] Фиг. 6(a) показывает транспортные средства 51A-51C, движущиеся на прямой дороге LD1, рядом с которой размещены наземные ориентиры LM1-LM3. Фиг. 6(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок, а фиг. 6(c) является таблицей, показывающей собственные позиции, обнаруженные посредством детектора 12 собственной позиции. Транспортное средство 51A показывает позицию транспортного средства, обозначающую его наибольшее приближение к наземному ориентиру LM1. Аналогично, транспортное средство 51B и транспортное средство 51C показывают позиции транспортного средства, обозначающие их наибольшее приближение к наземным ориентирам LM2 и LM3 соответственно. Светофор, который является примером цели Tgt, находится от транспортных средств 51A, 51B и 51C на расстоянии в 200 м, 120 м и 40 м соответственно.
[0033] В каждой из точек транспортных средств 51A-51C детектор 12 собственной позиции может вычислять собственную позицию посредством использования начальной позиции транспортного средства 51 как есть без накапливаемого суммирования величины перемещения транспортного средства. Таким образом, как показано на фиг. 6(b), ошибки, оцененные посредством модуля 16 оценки ошибок в точках транспортных средств 51A-51C, равны ошибкам, содержащимся в начальной ориентации, обнаруженной посредством детектора 21 начальной позиции. Поскольку транспортное средство 51 движется на прямой дороге LD1, собственная позиция, обнаруженная посредством детектора 12 собственной позиции, изменяется только в координате (z) в направлении движения (в направлении по оси Z), как показано на фиг. 6(c). Цель Tgt является началом координат, показанным на фиг. 6(c). Единицы следующие: gx [м], gy [м], gz [м], gp [°], gya [°], gr [°], x [м], y [м], z [м], наклон в продольном направлении [°], наклон относительно вертикальной оси [°] и крен [°].
[0034] Фиг. 7(a) показывает другой пример, в котором только наземный ориентир LM1 размещен рядом с прямой дорогой LD1. В точке транспортного средства 51A детектор 12 собственной позиции может вычислять собственную позицию посредством использования начальной позиции транспортного средства 51 как есть без накапливаемого суммирования величины перемещения транспортного средства. Таким образом, как показано на фиг. 7(b), ошибки, идентичные ошибкам на фиг. 6(b), вызываются в координатах и ориентации в точке транспортного средства 51A. Поскольку наземные ориентиры LM2 и LM3 не размещены, собственные позиции в транспортных средствах 51B и 51C вычисляются через накапливаемое суммирование величины перемещения из транспортного средства 51A. Таким образом, ошибки в координатах в транспортном средстве 51B и транспортном средстве 51C отличаются от ошибок в координатах на фиг. 6(b). Модуль 16 оценки ошибок обращается к данным, показанным на фиг. 5(a), и вычисляет ошибки в координатах на основе величин перемещения из транспортного средства 51A (80 м, 160 м). Чем больше величина перемещения из транспортного средства 51A, тем больше ошибки (gx, gy, gz) в координатах. Поскольку транспортное средство 51 не перемещается в направлениях вращения в этом примере, ошибки в ориентации в транспортных средствах 51B и 51C являются идентичными ошибкам в ориентации на фиг. 6(b).
[0035] Фиг. 8(a) показывает транспортные средства 51A и 51B, движущиеся на искривленной дороге LD2, рядом с которой размещены наземные ориентиры LM1 и LM2. Фиг. 8(b) является таблицей, показывающей ошибки, оцениваемые посредством модуля 16 оценки ошибок, а фиг. 8(c) является таблицей, показывающей собственные позиции, обнаруженные посредством детектора 12 собственной позиции. Транспортные средства 51A и 51B показывают позиции транспортного средства, обозначающие их наибольшее приближение к наземным ориентирам LM1 и LM2 соответственно.
[0036] В каждой точке транспортных средств 51A и 51B детектор 12 собственной позиции может вычислять собственную позицию посредством использования начальной позиции транспортного средства 51 как есть без накапливаемого суммирования величины перемещения транспортного средства. Таким образом, как показано на фиг. 8(b), ошибки, оцененные посредством модуля 16 оценки ошибок в точках транспортных средств 51A и 51B, равны ошибкам, содержащимся в начальной ориентации, обнаруженной посредством детектора 21 начальной позиции. Цель Tgt является началом координат, показанным на фиг. 8(c).
[0037] Фиг. 9(a) показывает другой пример, в котором только наземный ориентир LM1 размещен рядом с искривленной дорогой LD2. В точке транспортного средства 51A детектор 12 собственной позиции может вычислять собственную позицию посредством использования начальной позиции транспортного средства 51 как есть без накапливаемого суммирования величины перемещения транспортного средства. Таким образом, как показано на фиг. 9(b), ошибки, идентичные ошибкам на фиг. 8(b), вызываются в координатах и ориентации в точке транспортного средства 51A. Поскольку наземный ориентир LM2 не размещен, собственная позиция в транспортном средстве 51B вычисляется через накапливаемое суммирование величины перемещения из транспортного средства 51A. Между транспортным средством 51A и транспортным средством 51B транспортное средство вращается в направлении относительно вертикальной оси на 90°. Модуль 16 оценки ошибок обращается к данным, показанным на фиг. 5(b), и вычисляет ошибку в направлении относительно вертикальной оси на основе величины перемещения из транспортного средства 51A. Как показано на фиг. 9(b), ошибка (gya) в направлении относительно вертикальной оси увеличивается в транспортном средстве 51B. Между транспортным средством 51A и транспортным средством 51B координаты транспортного средства также изменяются в дополнение к ориентации транспортного средства. Тем не менее в этом примере учитывается только изменение ориентации, а изменение координат не учитывается.
[0038] Со ссылкой на фиг. 10 описывается примерный способ определения размера и центральных координат области обнаружения. Фиг. 10 является видом сверху, показывающим двумерную систему (xl, yl) координат в изображении (Img). Координаты (G1) представляют собой двумерные координаты цели, предположительно не содержащие ошибки, после преобразования координат посредством преобразователя 32 координат. Координаты (G2) представляют собой двумерные координаты цели, предположительно содержащие максимальные ошибки, после преобразования координат посредством преобразователя 32 координат. Разности (Xm, Ym) между координатами (G1) и координатами (G2) соответствуют ошибкам, содержащимся в относительных координатах цели, которые подвергнуты преобразованию координат посредством преобразователя 32 координат.
[0039] Модуль 14 задания областей обнаружения определяет область (Z1) обнаружения, имеющую координаты (G1) в качестве центральных координат, и четыре стороны, полученные посредством суммирования, с размером цели, длины 2 x Xm в направлении по оси X и длины 2 x Ym в направлении по оси Y. При такой области (Z1) обнаружения, даже максимальные ошибки приводят к тому, что координаты (G2) цели попадают в пределы области (Z1) обнаружения, что делает маловероятным то, что цель находится за пределами области обнаружения. Кроме того, поскольку область (Z1) обнаружения не увеличивается чрезмерно, ошибочное обнаружение объекта, отличного от цели, является маловероятным, а также обнаружение цели может достигаться при меньшей вычислительной нагрузке.
[0040] Альтернативно, модуль 14 задания областей обнаружения может выбирать область (Z1) обнаружения, имеющую ближайший размер, из множества предварительно определенных областей (Z1) обнаружения в различными размерами.
[0041] Со ссылкой на фиг. 11 области (Z1) обнаружения в примерах, показанных на фиг. 6-9, сравниваются по размеру. Здесь, размер области (Z1) обнаружения в транспортном средстве 51C на фиг. 6 и в транспортном средстве 51B на фиг. 8 задается в качестве опорного (x). Транспортное средство 51B на фиг. 6 является идентичным транспортному средству 51C на фиг. 6 по ошибкам, содержащимся в собственной позиции (в координатах и ориентации), но отличается от транспортного средства 51C на фиг. 6 по расстоянию до цели. Таким образом, размер области (Z1) обнаружения в транспортном средстве 51B на фиг. 6 в три раза превышает опорное значение (x). Вследствие отсутствия наземного ориентира транспортное средство 51B на фиг. 7 имеет ошибки, вызываемые посредством накапливаемого суммирования величины перемещения. По этой причине размер области (Z1) обнаружения дополнительно увеличивается до пятикратного превышения опорного значения (x). В транспортном средстве 51C на фиг. 7 ошибки, вызываемые посредством накапливаемого суммирования величины перемещения, увеличиваются еще больше, но расстояние до цели уменьшается. Таким образом, размер области (Z1) обнаружения уменьшается до двукратного превышения опорного значения (x). Аналогично, транспортное средство 51B на фиг. 9 имеет ошибки, вызываемые посредством накапливаемого суммирования величины перемещения; следовательно, размер области (Z1) обнаружения в два раза превышает опорное значение (x).
[0042] Как описано выше, когда расстояние до цели является большим, ошибки (gya, gp) в направлении относительно вертикальной оси и продольном направлении являются значительными, и в силу этого область обнаружения должна быть большой. С другой стороны, когда расстояние до цели является небольшим, ошибки (gx, gy, gz) в координатах являются значительными, и в силу этого размер области (Z1) обнаружения различается в зависимости от того, присутствует информация ориентиров или отсутствует.
[0043] Со ссылкой на фиг. 12, описывается пример способа обнаружения цели с использованием устройства 100 обнаружения цели.
[0044] На этапе S01 модуль 11 формирования изображений получает изображение посредством формирования изображений окрестности транспортного средства 51 на основе информации D03 камеры. На этапе S03 детектор 12 собственной позиции получает начальную позицию транспортного средства 51 из информации D01 ориентиров, обнаруживает собственную позицию транспортного средства на основе величины перемещения транспортного средства 51 относительно начальной позиции и выводит обнаруженную собственную позицию в качестве информации D05 собственной позиции.
[0045] На этапе S05 на основе картографической информации D02 и информации D05 собственной позиции модуль 13 оценки целевой позиции оценивает относительную позицию цели относительно транспортного средства 51. На этапе S07 на основе собственной позиции, обнаруженной на этапе S03, модуль 16 оценки ошибок оценивает ошибку (Ds), содержащуюся в собственной позиции. Более конкретно, в отношении фиг. 5(a) и 5(b), модуль 16 оценки ошибок оценивает ошибки (gx, gy, gz, gr, gp, gya), содержащиеся в собственной позиции транспортного средства 51, согласно величинам перемещения (расстоянию и углу) относительно начальной позиции.
[0046] На этапе S09 определяется то, превышает или нет оцененная ошибка (Ds) предварительно определенное пороговое значение (Dth). Когда ошибка (Ds) превышает пороговое значение (Dth) ("Да" на S09), большие ошибки вызываются в относительной позиции цели. В таком случае имеется значительная необходимость регулирования области (Z1) обнаружения по размеру согласно ошибкам. Таким образом, на этапе S13 модуль 31 оценки ошибок целевой позиции оценивает ошибки, которые вызываются в относительной позиции цели, посредством ошибок, содержащихся в собственной позиции.
[0047] Пороговое значение (Dth) может задаваться для каждой из ошибок (gx, gy, gz), содержащихся в координатах транспортного средства, и каждой из ошибок (gr, gp, gya), содержащихся в ориентации транспортного средства. После этого, когда любая из этих ошибок превышает свое пороговое значение, положительное определение ("Да") выполняется на этапе S09. Альтернативно, положительное определение ("Да") может выполняться на этапе S09 только тогда, когда все ошибки превышают их пороговые значения.
[0048] На этапе S15, как показано на фиг. 10, преобразователь 32 координат преобразует относительные координаты цели и их ошибки в координаты (xl, yl) в изображении (Img) цели. На этапе S17, как показано на фиг. 11, модуль 34 определения областей задает размер области (Z1) обнаружения на основе разностей (Xm, Ym) между координатами (G1), предположительно не содержащими ошибки, и координатами (G2), предположительно содержащими максимальные ошибки. На этапе S19 модуль 34 определения областей определяет центральные координаты области (Z1) обнаружения на основе координат (G1), предположительно не содержащих ошибки. Таким образом, определяется область (Z1) обнаружения.
[0049] Между тем, когда ошибка (Ds) равна или меньше порогового значения (Dth) ("Нет" на S09), небольшие ошибки вызываются в относительной позиции цели. В таком случае, имеется незначительная необходимость регулирования области (Z1) обнаружения по размеру согласно ошибкам. Таким образом, на этапе S11 преобразователь 32 координат выполняет преобразование координат для относительных координат цели, оцененных на этапе S05, и получает координаты (G1), предположительно не содержащие ошибки. На этапе S19 модуль 34 определения областей определяет центральные координаты области (Z1) обнаружения на основе координат (G1), предположительно не содержащих ошибки. Размер области (Z1) обнаружения в этом случае является предварительно определенным значением, которое является, например, опорным значением (x) на фиг. 11. Другими словами, когда ошибка (Ds) равна или меньше порогового значения (Dth), область (Z1) обнаружения определяется с размером, не отрегулированным согласно ошибке (Ds).
[0050] На этапе S21 модуль 34 определения областей определяет то, равна или выше либо нет величина изменения ошибки (Ds) между предыдущей ошибкой и текущей ошибкой предварительно определенного опорного значения. Когда величина изменения ошибки (Ds) равна или выше предварительно определенного значения ("Да" на S21), последовательность операций переходит к этапу S23, на котором модуль 34 определения областей сохраняет величину регулирования размера в области обнаружения в запоминающем устройстве, в качестве примера информации D09 области обнаружения. Когда величина изменения ошибки (Ds) меньше предварительно определенного опорного значения ("Нет" на S21), модуль 34 определения областей не обновляет величину регулирования размера в области обнаружения. Затем на этапе S25 детектор 15 цели выполняет обработку изображений для обнаружения цели для данных D08 изображений в области обнаружения, заданной и отрегулированной.
[0051] Устройство обнаружения цели согласно первому варианту осуществления, описанное выше, обеспечивает следующие преимущества.
[0052] Устройство обнаружения цели оценивает ошибку (Ds), содержащуюся в собственной позиции транспортного средства 51, на основе величины перемещения транспортного средства относительно начальной позиции, а затем регулирует размер области (Z1) обнаружения цели согласно ошибке (Ds). Область (Z1) обнаружения цели в силу этого может регулироваться по размеру с учетом ошибки (Ds). Таким образом, даже когда на ошибку (Ds) значительное влияние оказывает окружение транспортного средства, размер области (Z1) обнаружения может задаваться надлежащим образом согласно ошибке (Ds). Например, область обнаружения увеличивается по размеру, когда ошибка является большой, так что маловероятно то, что цель находится за пределами области обнаружения. С другой стороны, область обнаружения снижается по размеру, когда ошибка является небольшой, так что маловероятно то, что объект, отличный от цели, ошибочно обнаруживается. Нагрузка по обработке изображений также уменьшается. Когда размер области обнаружения цели за счет этого надлежащим образом регулируется с учетом ошибки, содержащейся в собственной позиции транспортного средства, цель может обнаруживаться точно. Даже когда имеется ошибка, цель может обнаруживаться при меньшей вычислительной нагрузке в области обнаружения, которая задается максимально возможно небольшой, но достаточно большой для того, чтобы распознавать цель.
[0053] На ошибку (Ds), содержащуюся в собственной позиции транспортного средства 51, значительное влияние оказывает величина перемещения, которая накапливаемо суммируется с начальной позицией, обнаруженной с использованием ориентира (например, наземных ориентиров LM1-LM3). Таким образом, ошибка может точно оцениваться посредством оценки ошибок, которая основана на величине перемещения относительно начальной позиции.
[0054] Детектор 12 собственной позиции может обнаруживать собственную позицию точно посредством сверки позиционной информации относительно характеристического объекта на земле (наземных ориентиров LM1-LM3) и картографической информации D02 между собой. Таким образом, ошибка (Ds) может быть точно оценена на основе величины перемещения от ориентира до собственной позиции.
[0055] В качестве собственной позиции детектор 12 собственной позиции обнаруживает координаты транспортного средства и ориентацию транспортного средства. Модуль 16 оценки ошибок оценивает ошибки, содержащиеся в координатах транспортного средства, на основе величины перемещения в направлении движения транспортного средства, и оценивает ошибки, содержащиеся в ориентации транспортного средства, на основе величины перемещения в направлениях вращения транспортного средства. Это обеспечивает точную оценку ошибки (Ds), содержащейся в собственной позиции транспортного средства, и в свою очередь, обеспечивает точную оценку ошибки в относительной позиции цели, которая вызывается посредством ошибки (Ds).
[0056] Модуль 34 определения областей сохраняет величину регулирования размера в области обнаружения, когда величина изменения ошибки (Ds) равна или выше предварительно определенного опорного значения. Это обеспечивает возможность хранения последней информации D09 области обнаружения.
[0057] Второй вариант осуществления
Второй вариант осуществления описывается с рассмотрением примера, в котором собственная позиция обнаруживается с использованием, вместо ориентира, GPS-спутника, который передает GPS-сигналы, принимаемые посредством транспортного средства 51. Детектор 12 собственной позиции принимает GPS-сигнал в качестве информации D01 ориентиров и обнаруживает начальную позицию (начальные координаты и начальную ориентацию) транспортного средства 51 из GPS-сигнала.
[0058] Транспортное средство 51 может не иметь возможность принимать GPS-сигналы вследствие окружения транспортного средства, например, когда имеется множество зданий, окружающих транспортное средство, которые блокируют GPS-сигналы. В таком случае, детектор 12 собственной позиции вычисляет собственную позицию транспортного средства посредством накапливаемого суммирования величины перемещения транспортного средства с начальной позицией, обнаруженной посредством детектора 21 начальной позиции.
[0059] Детектор 21 начальной позиции на фиг. 3 обнаруживает начальную позицию транспортного средства 51 с использованием GPS-сигнала. Начальная позиция представляет собой позицию, т.е. координаты и ориентацию, транспортного средства 51, непосредственно получаемую из GPS-сигнала. Когда GPS-сигнал не принимается, сумматор 22 величины перемещения вычисляет собственную позицию транспортного средства 51 посредством накапливаемого суммирования величины перемещения транспортного средства с начальной позицией, полученной посредством GPS-сигнала, принимаемого в прошлый раз.
[0060] Например, когда GPS-сигналы принимаются, детектор 12 собственной позиции обнаруживает информацию относительно начальной позиции в качестве информации D05 собственной позиции без накапливаемого суммирования величины перемещения транспортного средства. Когда GPS-сигналы не принимаются, детектор 12 собственной позиции выводит, в качестве информации D05 собственной позиции, информацию относительно позиции, полученную посредством накапливаемого суммирования величины перемещения транспортного средства с начальной позицией, обнаруженной в прошлый раз.
[0061] В примерах, показанных на фиг. 6(a)-9(a), позиции транспортных средств 51A-51C, обозначающих их наибольшее приближение к наземным ориентирам LM1-LM3, надлежащим образом соответствуют точкам, в которых начальные позиции транспортного средства 51 обнаруживаются посредством приема GPS-сигналов.
[0062] Другие конфигурации для устройства 100 обнаружения цели и способа обнаружения цели являются идентичными конфигурациям в первом варианте осуществления и в силу этого не описываются с тем, чтобы не допускать повторяющегося описания.
[0063] Как описано выше, детектор 12 собственной позиции обнаруживает собственную позицию посредством использования GPS-спутника в качестве ориентира, и модуль 16 оценки ошибок оценивает ошибку на основе величины перемещения от позиции транспортного средства при последнем приеме сигнала, передаваемого из GPS-спутника, до собственной позиции. Начальная позиция может быть точно обнаружена посредством использования GPS-сигнала, передаваемого из GPS-спутника. Ошибка (Ds) может точно оцениваться на основе величины перемещения от приема GPS-сигнала до собственной позиции.
[0064] Настоящее изобретение описано выше с использованием вариантов осуществления. Тем не менее, настоящее изобретение не ограничено тем, что описано выше, и может модифицироваться и улучшаться различными способами, как очевидно специалистам в данной области техники.
[0065] Например, детектор 12 собственной позиции может обнаруживать собственную позицию с использованием как наземного ориентира, так и GPS-спутника в качестве ориентира. В этом случае, модуль 16 оценки ошибок может оценивать ошибку (Ds) на основе величины перемещения либо от последнего обнаружения наземного ориентира, либо от последнего приема GPS-сигнала до собственной позиции.
[0066] Когда транспортное средство 51 может обмениваться данными с наземным ориентиром, относительная позиция наземного ориентира и транспортного средства 51 относительно друг друга может получаться посредством связи, аналогично случаю использования GPS-спутника. В этом случае, модуль 16 оценки ошибок может оценивать ошибку (Ds) на основе величины перемещения от последнего приема позиции, передаваемой из наземного ориентира, до собственной позиции.
[0067] Предусмотрен случай, в котором устройство определения позиции транспортного средства устанавливается рядом с дорогой, чтобы обнаруживать позиции транспортных средств, движущихся в пределах этого участка дороги, предоставляя возможность получения позиционной информации относительно транспортного средства через связь между транспортным средством и дорожной инфраструктурой и т.п. В таком случае, детектор 12 собственной позиции может обнаруживать собственную позицию транспортного средства 51 посредством связи между транспортным средством и дорожной инфраструктурой и т.п. с придорожным устройством определения позиции транспортного средства. Затем модуль 16 оценки ошибок может оценивать ошибку (Ds) на основе величины перемещения от последнего приема позиции транспортного средства (начальной позиции), передаваемой из придорожного устройства определения позиции транспортного средства, до собственной позиции.
Список номеров ссылок
[0068] 11 - модуль формирования изображений
12 - детектор собственной позиции
13 - модуль оценки целевой позиции
14 - модуль задания областей обнаружения
15 - детектор цели
16 - модуль оценки ошибок
21 - детектор начальной позиции
22 - сумматор величины перемещения
Z1 - область обнаружения
Изобретение относится к области навигационного приборостроения и может найти применение в системах обнаружения цели. Технический результат – повышение точности. Для этого устройство обнаружения цели получает изображение посредством формирования изображений окрестности транспортного средства, обнаруживает собственную позицию транспортного средства на основе величины перемещения транспортного средства относительно его начальной позиции и оценивает относительную позицию цели, расположенной около транспортного средства, относительно транспортного средства на основе собственной позиции и информации относительно позиции цели на карте. Устройство обнаружения цели задает область обнаружения для цели внутри изображения на основе относительной позиции цели относительно транспортного средства и обнаруживает цель из области обнаружения. Устройство обнаружения цели оценивает ошибку, содержащуюся в собственной позиции, на основе величины перемещения транспортного средства относительно начальной позиции, и регулирует размер области обнаружения для цели согласно ошибке. 2 н. и 4 з.п. ф-лы, 12 ил.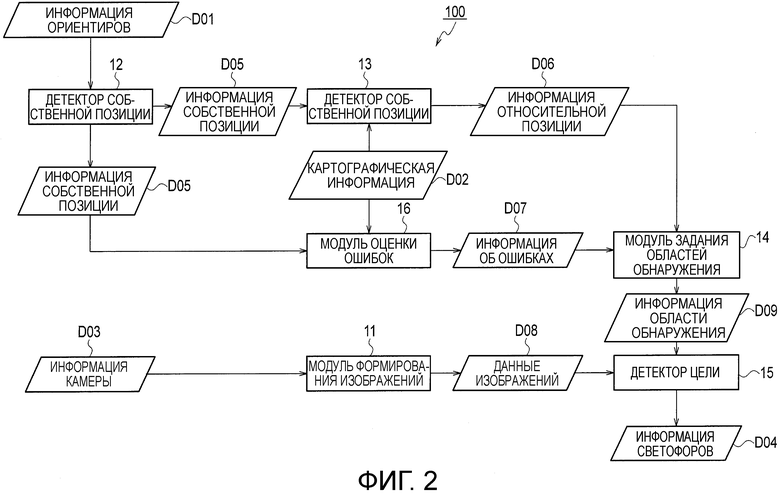
1. Устройство обнаружения цели, содержащее:
- модуль формирования изображений, смонтированный в транспортном средстве и выполненный с возможностью получать изображение посредством формирования изображений окрестности транспортного средства;
- детектор собственной позиции, выполненный с возможностью обнаруживать собственную позицию транспортного средства на основе величины перемещения транспортного средства относительно начальной позиции транспортного средства;
- модуль оценки целевой позиции, выполненный с возможностью оценивать относительную позицию цели, которая расположена около транспортного средства, относительно транспортного средства на основе собственной позиции и информации относительно позиции цели на карте;
- модуль задания областей обнаружения:
- выполненный с возможностью указывать позицию формирования изображений в изображении, в которой формируется изображение цели, на основе относительной позиции цели относительно транспортного средства, и
- выполненный с возможностью задавать область обнаружения для цели на основе позиции формирования изображений в изображении;
- детектор цели, выполненный с возможностью обнаруживать цель из области обнаружения; и
- модуль оценки ошибок, выполненный с возможностью оценивать ошибку, содержащуюся в собственной позиции, обнаруженной посредством детектора собственной позиции, на основе величины перемещения транспортного средства от начальной позиции до собственной позиции, при этом:
- модуль задания областей обнаружения регулирует размер области обнаружения для цели согласно ошибке, оцененной посредством модуля оценки ошибок.
2. Устройство обнаружения цели по п. 1, в котором:
- детектор собственной позиции включает в себя:
- детектор начальной позиции, выполненный с возможностью обнаруживать начальную позицию транспортного средства посредством использования ориентира, и
- сумматор величины перемещения, выполненный с возможностью вычислять собственную позицию посредством накапливаемого суммирования величины перемещения транспортного средства с начальной позицией, и
- модуль оценки ошибок оценивает ошибку на основе величины перемещения транспортного средства от начальной позиции до собственной позиции транспортного средства.
3. Устройство обнаружения цели по п. 2, в котором:
- детектор начальной позиции обнаруживает начальную позицию посредством использования спутника глобальной системы позиционирования в качестве ориентира, и
- модуль оценки ошибок оценивает ошибку на основе величины перемещения транспортного средства от начальной позиции до собственной позиции, соответствующей последнему приему сигнала, передаваемого из спутника глобальной системы позиционирования.
4. Устройство обнаружения цели по любому из пп. 1-3, в котором:
- в качестве собственной позиции детектор собственной позиции обнаруживает координаты транспортного средства и ориентацию транспортного средства, и
- модуль оценки ошибок оценивает ошибку, содержащуюся в координатах транспортного средства, на основе величины перемещения транспортного средства в направлении движения, и оценивает ошибку, содержащуюся в ориентации транспортного средства, на основе величины перемещения транспортного средства в направлении вращения.
5. Устройство обнаружения цели по любому из пп. 1-3, в котором:
- модуль задания областей обнаружения сохраняет величину регулирования размера области обнаружения, когда величина изменения ошибки равна или выше предварительно определенного опорного значения.
6. Способ обнаружения цели с использованием устройства обнаружения цели, содержащего модуль формирования изображений, смонтированный в транспортном средстве, детектор собственной позиции, модуль оценки целевой позиции, модуль задания областей обнаружения, детектор цели и модуль оценки ошибок,
причем способ обнаружения цели содержит этапы, на которых:
- получают изображение посредством формирования изображений окрестности транспортного средства посредством использования модуля формирования изображений;
- обнаруживают собственную позицию транспортного средства на основе величины перемещения транспортного средства относительно начальной позиции транспортного средства посредством использования детектора собственной позиции;
- оценивают относительную позицию цели, которая расположена около транспортного средства, относительно транспортного средства на основе собственной позиции и информации относительно позиции цели на карте посредством использования модуля оценки целевой позиции;
- указывают позицию формирования изображений в изображении, в которой формируется изображение цели, на основе относительной позиции цели относительно транспортного средства посредством использования модуля задания областей обнаружения;
- задают область обнаружения для цели на основе позиции формирования изображений в изображении посредством использования модуля задания областей обнаружения;
- оценивают ошибку, содержащуюся в собственной позиции, на основе величины перемещения транспортного средства от начальной позиции до собственной позиции посредством использования модуля оценки ошибок;
- регулируют размер области обнаружения для цели согласно ошибке посредством использования модуля задания областей обнаружения; и
- обнаруживают цель из области обнаружения посредством использования детектора цели.
| JP 2008287572 А, 27.11.2008 | |||
| JP 2007309757 А, 29.11.2007 | |||
| WO 2008075438 А1, 26.06.2008 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2109344C1 |
| Ботуз С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| - М.: ИПРЖ "Радиотехника", 1998 | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

