Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу оценки собственной позиции и к устройству оценки собственной позиции.
Уровень техники
[0002] Известна технология оценки собственной позиции автономного мобильного робота (см. патентный документ 1). В патентном документе 1, результат (информация окружающей среды) обнаружения области перемещения мобильного робота посредством датчика ограничивается в области, которая предварительно определена на основе мобильного робота, и эта ограниченная информация окружающей среды сравнивается с картой окружающих условий, заранее сохраненной в мобильном роботе, за счет этого оценивая его собственную позицию.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Выложенная публикация заявки на патент Японии номер 2008-250906
Сущность изобретения
Техническая задача
[0004] Между прочим, чтобы оценивать собственную позицию транспортного средства, возможны случаи использования линий дорожной разметки, позиционированных с обеих сторон транспортного средства в направлении ширины транспортного средства. Обычно, когда обе линии дорожной разметки одновременно обнаруживаются, ошибка может быть включена в обнаруженную позицию линий дорожной разметки. В частности, позиция линий дорожной разметки в направлении ширины транспортного средства относительно транспортного средства постоянно смещается вследствие ошибки калибровки и т.п. По этой причине, результат оценки собственной позиции становится нестабильным, или точность оценки собственной позиции уменьшается.
[0005] Настоящее изобретение осуществлено в свете вышеуказанной проблемы, и задача настоящего изобретения заключается в том, чтобы предоставлять способ оценки собственной позиции и устройство оценки собственной позиции для повышения точности оценки собственной позиции за счет исключения данных целевой позиции, которые оцениваются как имеющие большое количество ошибок относительной позиции.
Решение задачи
[0006] Способ оценки собственной позиции согласно одному аспекту настоящего изобретения включает в себя: обнаружение относительной позиции между целью, присутствующей в окрестностях движущегося объекта, и движущимся объектом; сохранение позиции, в которую обнаруженная относительная позиция перемещается на величину перемещения движущегося объекта, в качестве данных целевой позиции; выбор данных целевой позиции на основе надежности относительной позиции относительно движущегося объекта данных целевой позиции; и сравнение выбранных данных целевой позиции с картографической информацией, включающей в себя информацию позиции относительно цели, присутствующей на дороге или вокруг дороги, за счет этого оценивая собственную позицию, которая представляет собой текущую позицию движущегося объекта.
Преимущества изобретения
[0007] Согласно способу оценки собственной позиции согласно одному аспекту настоящего изобретения, поскольку могут исключаться данные целевой позиции, которые оцениваются как имеющие большое количество ошибок относительной позиции, может повышаться точность оценки собственной позиции.
Краткое описание чертежей
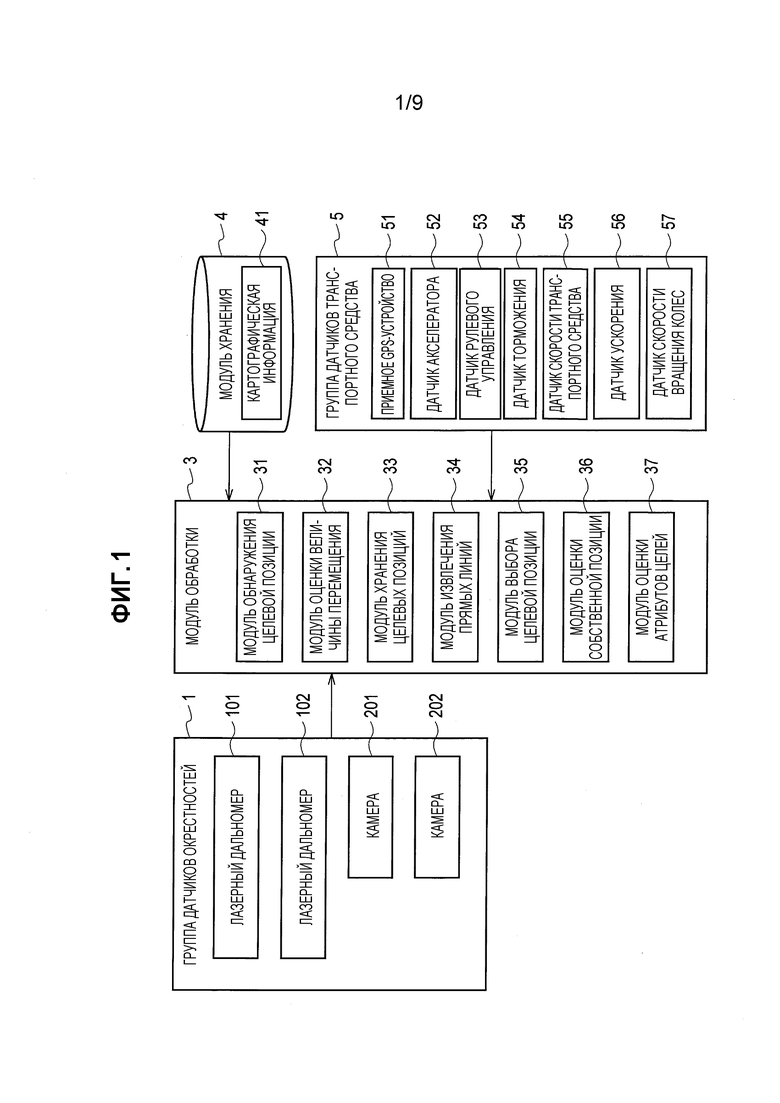
[0008] Фиг. 1 является блок-схемой, показывающей пример конфигурации устройства оценки собственной позиции согласно варианту осуществления.
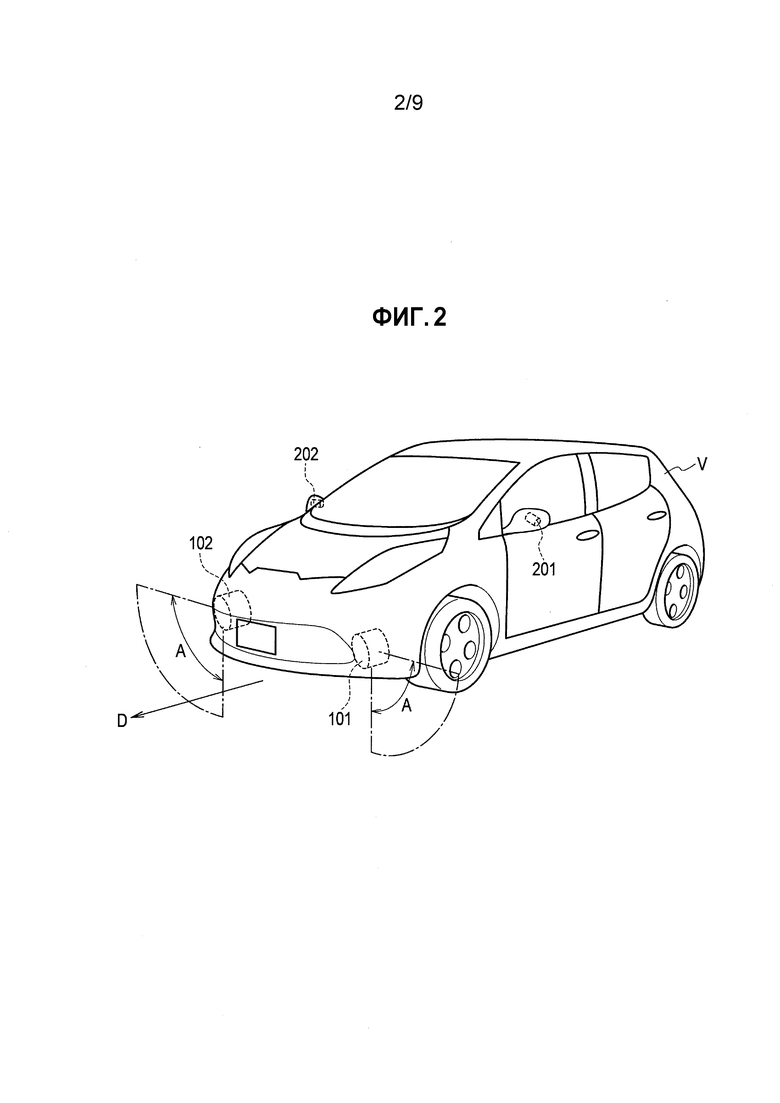
Фиг. 2 является схемой в перспективе, показывающей состояние, в котором группа 1 датчиков окрестностей монтируется в транспортном средстве V.
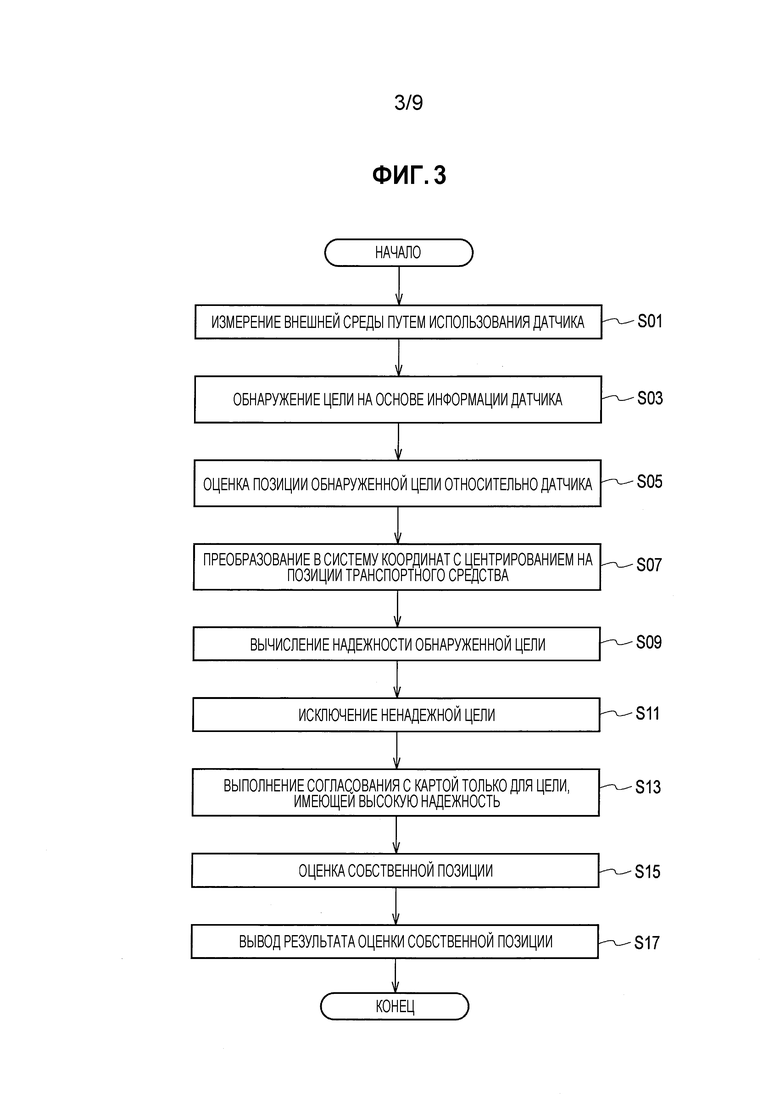
Фиг. 3 является блок-схемой последовательности операций способа, показывающей пример способа оценки собственной позиции с использованием устройства оценки собственной позиции, показанного на фиг. 1.
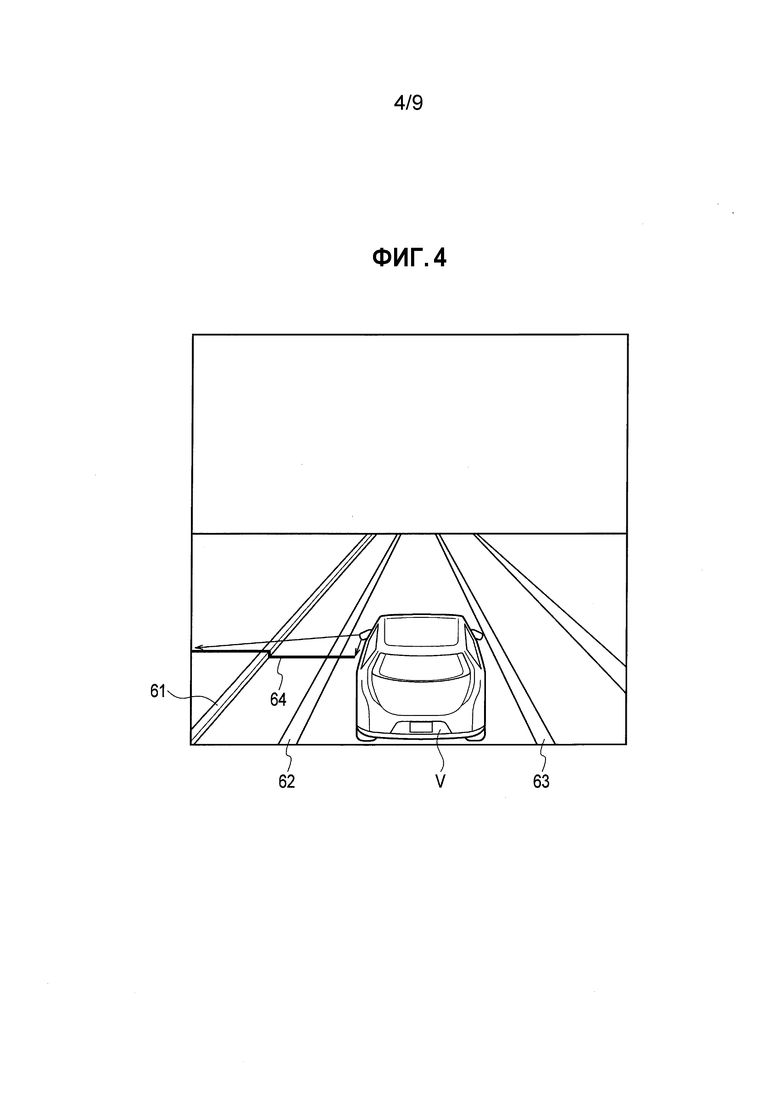
Фиг. 4 является схемой в перспективе, показывающей окружение, в котором движется транспортное средство V, когда выполняется оценка собственной позиции.
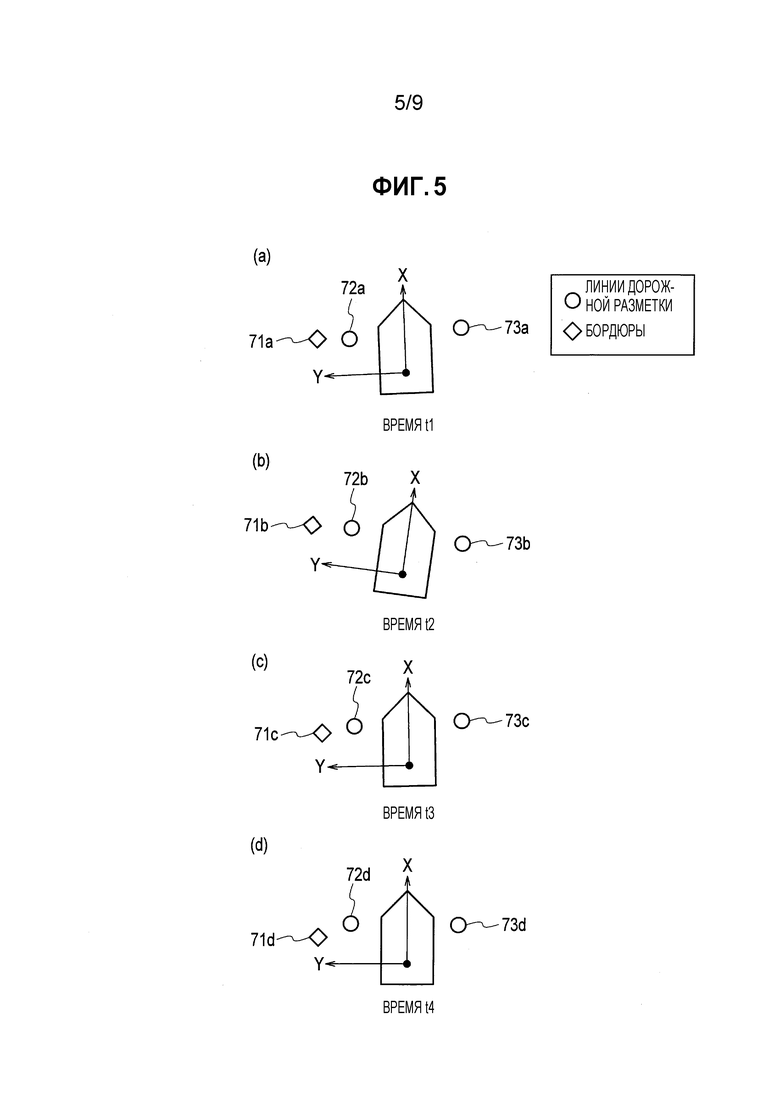
Фиг. 5(a)-5(d) являются схемами, соответственно, показывающими позиции 71 бордюров 61 и данные 72 и 73 целевой позиции линий 62 и 63 дорожной разметки в системе координат транспортного средства, обнаруженные посредством детектора 31 целевой позиции в течение времени t1-t4 в примере, показанном на фиг. 4.
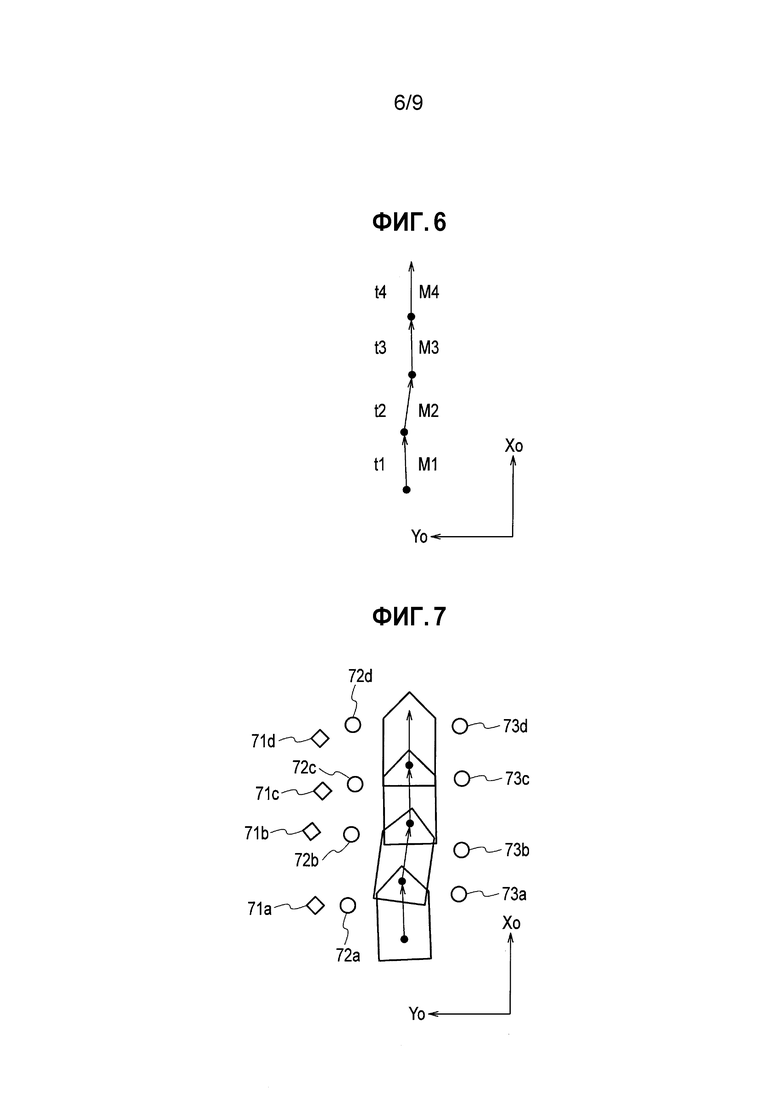
Фиг. 6 является схемой, показывающей результат интегрирования величины перемещения транспортного средства V, вычисленной на основе результата обнаружения посредством группы 5 датчиков транспортного средства в примере, показанном на фиг. 5(a)-5(d).
Фиг. 7 является схемой, показывающей данные целевой позиции, преобразованные в одометрическую систему координат в примере, показанном на фиг. 5 и 6.
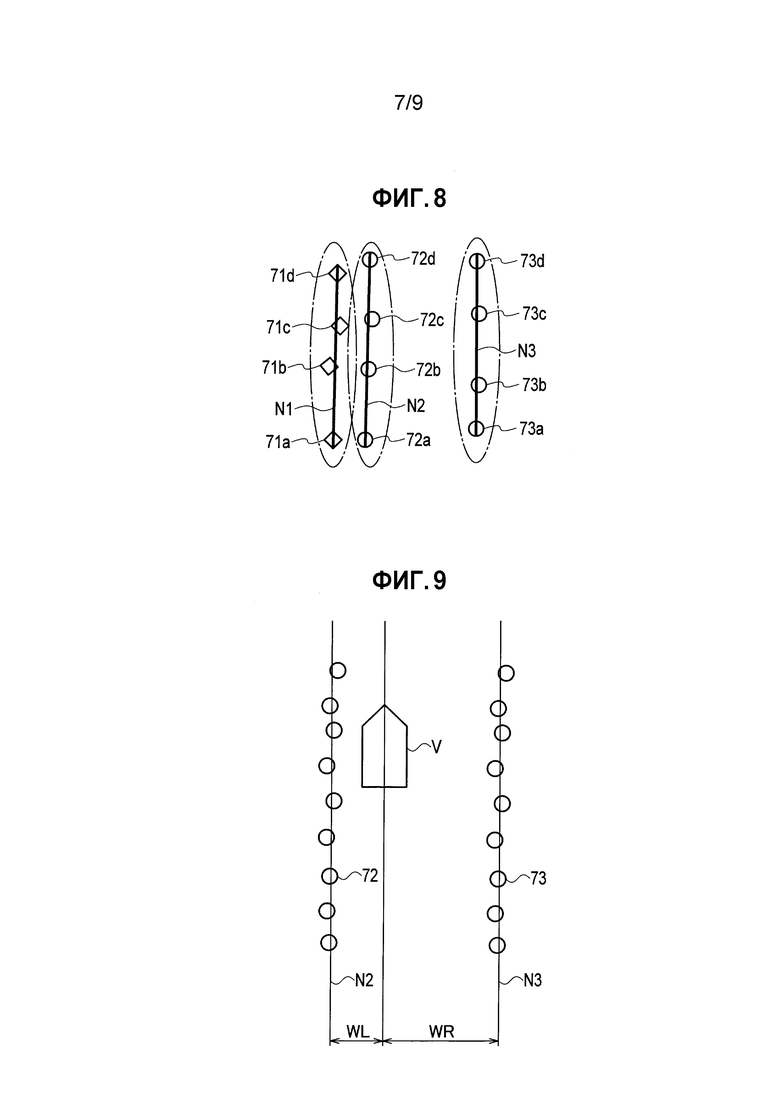
Фиг. 8 является концептуальной схемой, показывающей линейную информацию (N1, N2 и N3), извлеченную из данных (71a-71d, 72a-72d и 73a-73d) целевой позиции.
Фиг. 9 является схемой, показывающей прямые линии (N2 и N3), аппроксимированные к данным (72 и 73) целевой позиции, указывающим границы полос движения.
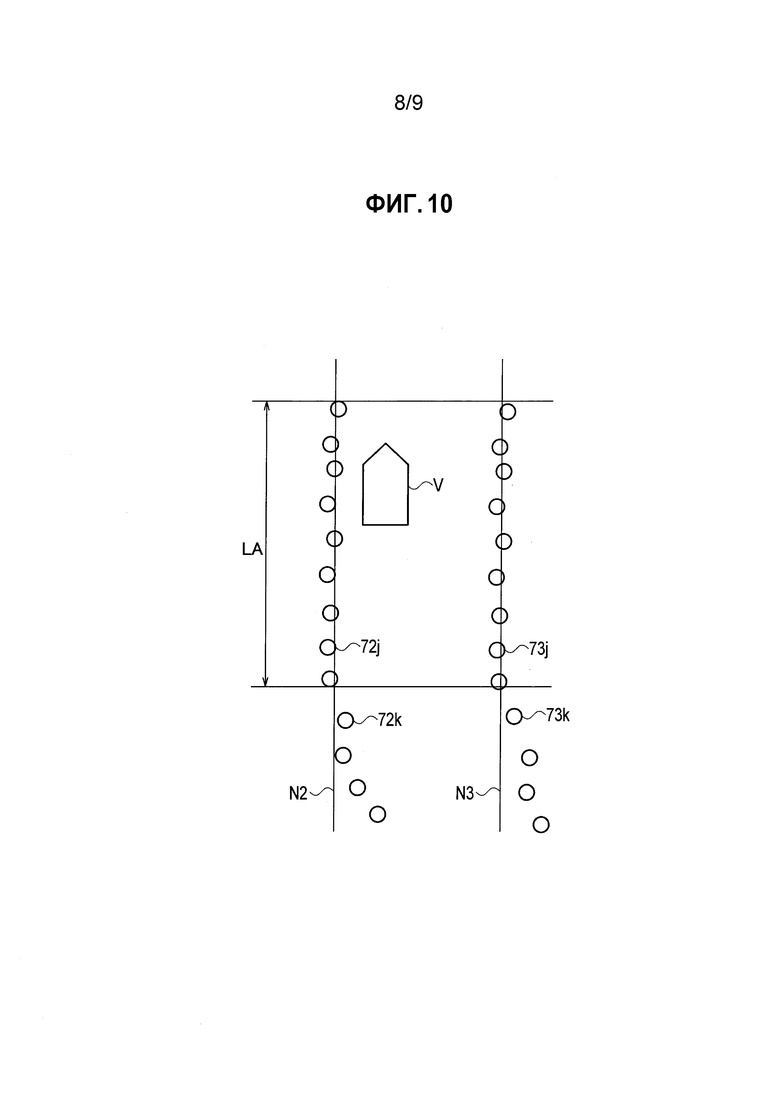
Фиг. 10 является схемой, показывающей такой аспект, что границы (72j, 72k, 73j и 73k) полос движения, которые могут линейно аппроксимироваться, обнаруживаются, что указывает границы полос движения, указывающие полосу движения, в которой движется транспортное средство V.
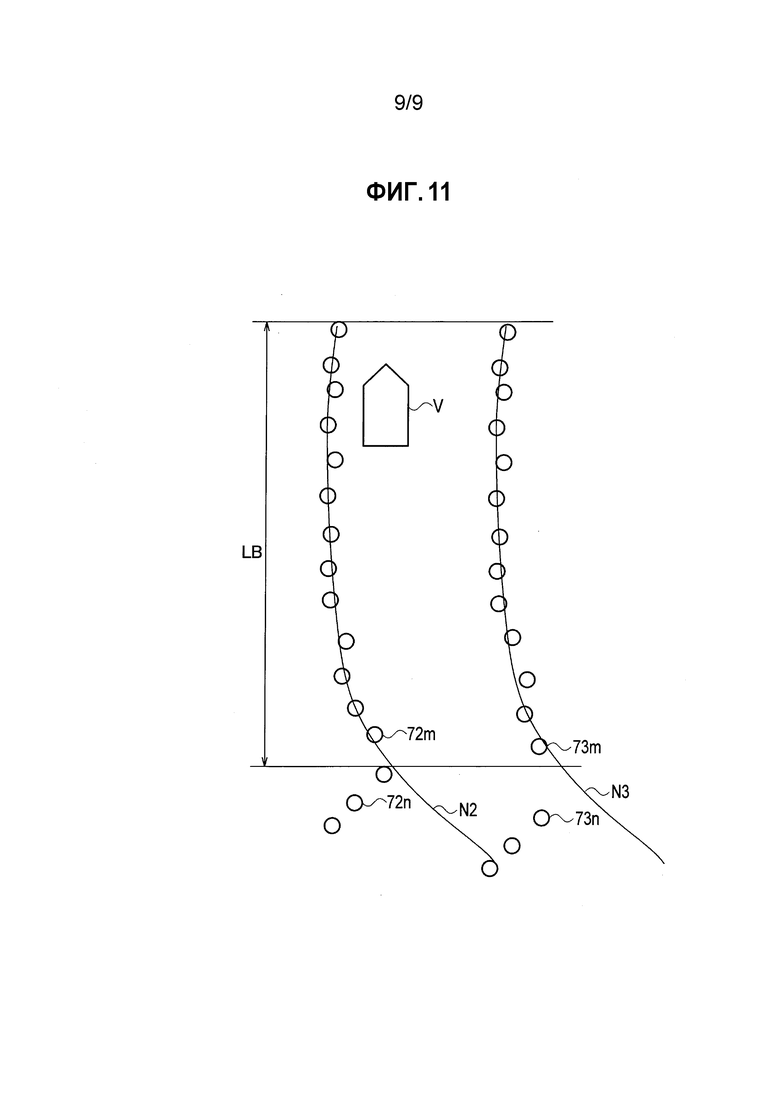
Фиг. 11 является схемой, показывающей такой аспект, что границы (72m, 72n, 73m и 73n) полос движения, которые могут криволинейно аппроксимироваться, обнаруживаются, что указывает границы полос движения, указывающие полосу движения, в которой движется транспортное средство V.
Подробное описание вариантов осуществления
[0009] Ниже поясняется вариант осуществления со ссылкой на чертежи. В описании чертежей, идентичная или аналогичная ссылка с номером присоединяется к идентичной или аналогичной части, и ее пояснение опускается.
[0010] Со ссылкой на фиг. 1, далее поясняется конфигурация устройства оценки собственной позиции согласно настоящему варианту осуществления. Устройство оценки собственной позиции согласно настоящему варианту осуществления включает в себя группу 1 датчиков окрестностей, модуль 3 обработки, модуль 4 хранения и группу 5 датчиков транспортного средства. Устройство оценки собственной позиции согласно настоящему варианту осуществления монтируется в транспортном средстве V (см. фиг. 2) и выполнено с возможностью оценивать собственную позицию транспортного средства V.
[0011] В настоящем варианте осуществления, предусмотрена такая конфигурация, чтобы оценивать всего три степени свободы, включающие в себя позиции и угол ориентации (т.е. позицию в направлении восток-запад (в направлении по оси X) (координату X(м)) и позицию в направлении север-юг (в направлении по оси Y) (координату Y(м)) в качестве собственной позиции транспортного средства V, которая должна оцениваться, и азимутальный угол θ транспортного средства (угол рыскания (рад)) в качестве данных угла ориентации транспортного средства V, которые должны оцениваться) на двумерной плоскости.
[0012] Группа 1 датчиков окрестностей включает в себя, например, множество лазерных дальномеров 101 и 102 (LRF) и множество камер 201 и 202. Лазерные дальномеры 101 и 102 (LRF), соответственно, выполнены с возможностью определять расстояние и азимут до цели путем приема света, отражаемого от цели, на которую излучается лазерный свет. Камеры 201 и 202 выполнены с возможностью захватывать окрестности транспортного средства V и получать цифровое изображение, допускающее обработку изображений. Таким образом, группа 1 датчиков окрестностей состоит из множества датчиков, соответственно, выполненных с возможностью обнаруживать цели, присутствующие в окрестностях транспортного средства V. В дополнение к множеству датчиков, группа 1 датчиков окрестностей может включать в себя сонар и/или радар. Цели, которые присутствуют в окрестностях транспортного средства V, включают в себя: цели, указывающие границы полос движения, присутствующие на полосе движения в окрестностях транспортного средства V, например, линии дорожной разметки, бордюры, разделительные полосы, дорожные ограждения и отражатели; разметки поверхности дороги, например, стоп-линии, пешеходные переходы и разметки по ограничению скорости; и дорожные сооружения, например, дорожные знаки, светофоры и столбовую опору линии электропередач.
[0013] Фиг. 2 показывает пример, иллюстрирующий состояние, в котором, например, группа 1 датчиков окрестностей монтируется в транспортном средстве V. LRF 101 и 102, соответственно, могут монтироваться около передних крыльев обеих сторон транспортного средства V. LRF 101 и 102 выполнены с возможностью сканировать лазерный свет под предварительно определенным углом сканирования (например, 90 градусов) таким образом, что след лазерного света, который должен испускаться, например, может формировать вертикальную плоскость относительно поверхности дороги в качестве оси вращения вдоль направления D спереди назад транспортного средства V. Следовательно, LRF 101 и 102 могут обнаруживать цели, такие как бордюры и т.п., которые присутствуют в направлении справа налево транспортного средства V. LRF 101 и 102 выполнены с возможностью последовательно выводить форму обнаруженной цели в модуль 3 обработки в качестве результата обнаружения.
[0014] Камеры 201 и 202, соответственно, могут монтироваться, например, в боковых зеркалах обеих сторон транспортного средства V. Камеры 201 и 202, например, выполнены с возможностью захватывать изображение посредством полупроводниковых элементов формирования изображений, например, прибора с зарядовой связью (CCD) и комплементарной структуры "металл-оксид-полупроводник" (CMOS). Камеры 201 и 202, например, выполнены с возможностью захватывать поверхность дороги для поперечного направления транспортного средства V. Камеры 201 и 202 выполнены с возможностью последовательно выводить захваченное изображение в модуль 3 обработки.
[0015] Возвращаясь к фиг. 1, модуль 4 хранения представляет собой модуль хранения картографической информации, выполненный с возможностью сохранять картографическую информацию 41, включающую в себя информацию позиции относительно целей, присутствующих на дороге или вокруг дороги. Модуль 4 хранения может конструироваться путем включения в конструкцию полупроводникового запоминающего устройства, магнитного диска и т.п. Цели (ориентир), записанные в картографической информации 41, включают в себя, например, различные инфраструктурные объекты, которые могут обнаруживаться посредством группы 1 датчиков окрестностей, помимо: дорожной разметки, указывающей стоп-линии, пешеходные переходы, предварительных уведомлений относительно пешеходного перехода, линий секций и т.п.; конструкций, например, бордюров и т.п. и т.д. Также относительно цели, фактически имеющей трехмерную конструкцию, такой как бордюры, картографическая информация 41 описывается только с помощью информации позиции относительно двумерной плоскости. В картографической информации 41, информация позиции, например, бордюры и линии дорожной разметки, задается путем агрегирования линейной информации, имеющей информацию двумерной позиции относительно обеих конечных точек. Картографическая информация 41 описывается как линейная информация на двумерной плоскости, аппроксимированная с помощью ломаной линии, когда форма реального окружения является кривой.
[0016] Группа 5 датчиков транспортного средства включает в себя приемное GPS-устройство 51, датчик 52 акселератора, датчик 53 рулевого управления, датчик 54 торможения, датчик 55 скорости транспортного средства, датчик 56 ускорения, датчик 57 скорости вращения колес и другие датчики, к примеру, датчик скорости относительно вертикальной оси. Каждый датчик 51-57 соединяется с модулем 3 обработки и выполнен с возможностью последовательно выводить различные результаты обнаружения в модуль 3 обработки. Модуль 3 обработки может вычислять позицию транспортного средства V в картографической информации 41 или может вычислять одометрию, указывающую величину перемещения транспортного средства V в единицу времени, за счет использования каждого результата обнаружения группы 5 датчиков транспортного средства. Например, в качестве способа измерения величины перемещения транспортного средства V, может рассматриваться различные схемы, например, способ одометрического измерения на частоте вращения шины, способ инерционного измерения с использованием гироскопа или датчика ускорения, способ с использованием приема электрических волн из спутников, например, глобальной навигационной спутниковой системы (GNSS) и системы одновременной локализации и отображения на карте (SLAM), для оценки величины перемещения из изменения значения измерения внешних датчиков; но может использоваться любой способ.
[0017] Модуль 3 обработки включает в себя: модуль 31 обнаружения целевой позиции, модуль 32 оценки величины перемещения, модуль 33 хранения целевых позиций, модуль 34 извлечения прямых линий, модуль 35 выбора целевой позиции, модуль 36 оценки собственной позиции и модуль 37 оценки атрибутов целей. Модуль 3 обработки, например, может конструироваться путем включения микроконтроллера, который представляет собой интегральную схему, содержащую центральный процессор (CPU), запоминающее устройство, интерфейс ввода-вывода и т.п. В этом случае, множество модулей (31-37) обработки информации, составляющих модуль 3 обработки, реализуются посредством CPU, выполняющего компьютерную программу, предварительно установленную в микроконтроллере. Каждый модуль, составляющий модуль 3 обработки, может конструироваться путем включения интегрированных аппаратных средств или может конструироваться путем включения дискретных аппаратных средств. Микроконтроллер, например, также может использоваться в качестве электронного модуля управления (ECU), используемого для другого управления в отношении транспортного средства V, например, управления автоматическим вождением. "Схема оценки собственной позиции" предоставляется здесь путем включения модуля 32 оценки величины перемещения, модуля 33 хранения целевых позиций, модуля 34 извлечения прямых линий, модуля 35 выбора целевой позиции, модуля 36 оценки собственной позиции и модуля 37 оценки атрибутов целей.
[0018] Модуль 31 обнаружения целевой позиции обнаруживает относительную позицию между целью, присутствующей в окрестностях транспортного средства V, и транспортным средством V на основе результата обнаружения, по меньшей мере, любого из LRF 101 и 102 и камер 201 и 202. Относительная позиция, обнаруженная модулем 31 обнаружения позиции цели, представляет собой позицию в системе координат транспортного средства. Система координат транспортного средства может приспосабливать центр оси задних колес транспортного средства V в качестве исходной точки, прямое направление транспортного средства V в качестве положительного направления по оси X, направление влево транспортного средства V в качестве положительного направления по оси Y и направление вверх в качестве положительного направления по оси Z. Кроме того, формула преобразования из системы координат (системы координат датчика) LRF 101 и 102 и камер 201 и 202 в систему координат транспортного средства заранее задается в модуле 31 обнаружения целевой позиции. "Датчик обнаружения цели" предоставляется здесь путем включения группы 5 датчиков транспортного средства и модуля 31 обнаружения целевой позиции.
[0019] Модуль 32 оценки величины перемещения обнаруживает одометрию, которая является величиной перемещения транспортного средства V в единицу времени, на основе информации результатов обнаружения, по меньшей мере, любого из датчиков, включенных в группу 5 датчиков транспортного средства. Величина перемещения транспортного средства V определяется в качестве величины перемещения в одометрической системе координат. Модуль 33 хранения целевых позиций сохраняет позицию, в которую относительная позиция цели, обнаруженной модулем 31 обнаружения позиции цели, перемещается на величину перемещения транспортного средства V, определенную модулем 32 оценки величины перемещения, в качестве данных целевой позиции, в первичном модуле хранения или в модуле 4 хранения в модуле 3 обработки.
[0020] Модуль 34 извлечения прямых линий извлекает линейную информацию из данных целевой позиции, сохраненных в модуле 33 хранения целевых позиций. Модуль 37 оценки атрибутов целей оценивает атрибут цели на основе результата обнаружения, по меньшей мере, любого из LRF 101 и 102 и камер 201 и 202. Модуль 35 выбора целевой позиции выбирает данные целевой позиции на основе надежности относительной позиции относительно транспортного средства данных целевой позиции. Модуль 35 выбора целевой позиции определяет надежность относительной позиции данных целевой позиции относительно транспортного средства V на основе линейной информации, извлеченной модулем 34 извлечения прямых линий, и атрибута цели, оцененного модулем 37 оценки атрибутов целей. Модуль 36 оценки собственной позиции оценивает собственную позицию, которая представляет собой текущую позицию транспортного средства V, путем сравнения выбранных данных целевой позиции с картографической информацией, включающей в себя информацию позиции относительно цели, присутствующей на дороге или вокруг дороги.
[0021] Со ссылкой на фиг. 3, далее поясняется пример способа оценки собственной позиции с использованием устройства оценки собственной позиции, показанного на фиг. 1. Во-первых, на этапе S01, устройство оценки собственной позиции измеряет окрестности транспортного средства V с использованием группы 1 датчиков окрестностей.
[0022] Переходя к этапу S03, группа 1 датчиков окрестностей, соответственно, обнаруживает цели, присутствующие в окрестностях транспортного средства V. Переходя к этапу S05, модуль 31 обнаружения целевой позиции оценивает позицию цели относительно LRF 101 и 102 и камер 201 и 202 (т.е. относительную позицию цели в системе координат датчика) на основе результата обнаружения, по меньшей мере, любого из LRF 101 и 102 и камер 201 и 202. Например, в случае камер 201 и 202, взаимосвязь между позицией в изображении и фактическим расстоянием может заранее измеряться. Альтернативно, можно использовать стереосистему обнаружения движения. Способ оценки не ограничен этим способом, и также могут использоваться другие известные способы. Если используется другой датчик (например, сонар, LRF или радар) допускающий получение информации расстояния, значение, которое должно получаться, может непосредственно использоваться.
[0023] Фиг. 4 является примером, иллюстрирующим окружение, в котором движется транспортное средство V, когда выполняется оценка собственной позиции. В примере, показанном на фиг. 4, поверхность дороги, включающая в себя бордюр 61, облучается лазерным светом, излучаемым из LRF 101, как показано посредством линии 64. Модуль 31 обнаружения целевой позиции извлекает место, в котором изменение формы является большим, в качестве позиции бордюра 61, на основе направления и расстояния излучаемого лазерного света, и за счет этого обнаруживает позицию в системе координат датчика. Поскольку можно предполагать, что всегда имеется поверхность дороги в вертикальном направлении вниз LRF 101 и 102, бордюр 61 может обнаруживаться путем извлечения точки, в которой возникает большое изменение, когда поверхность дороги сравнивается с его высотой.
[0024] Кроме того, модуль 31 обнаружения целевой позиции обнаруживает линии 62 и 63 дорожной разметки, которые присутствуют с обеих сторон транспортного средства V, соответственно, на основе информации яркости изображений, захваченных посредством камер 201 и 202. Например, модуль 31 обнаружения целевой позиции обнаруживает рисунок, из которого яркость изменяется в порядке темного участка, яркого участка и яркого участка, на основе полутонового изображения, захваченного посредством камеры (201, 202), и в силу этого может обнаруживать центр яркого участка в качестве линии (62, 63) дорожной разметки. Позиции линий 62 и 63 дорожной разметки в системе координат датчика могут, соответственно, обнаруживаться на основе позиционной взаимосвязи между камерами 201, 202 и поверхностью дороги. Позиция в системе координат датчика, обнаруженная на этапе S05, в дальнейшем обрабатывается в качестве двумерных данных, из которых исключается информация высоты.
[0025] Переходя к этапу S07, модуль 31 обнаружения целевой позиции преобразует относительную позицию цели в системе координат датчика в относительную позицию цели в системе координат транспортного средства с использованием заранее заданной формулы преобразования.
[0026] Фиг. 5(a)-5(d) являются схемами, соответственно, показывающими позиции 71 бордюра 61 и данные 72 и 73 целевой позиции линий 62 и 63 дорожной разметки в системе координат транспортного средства, обнаруженные посредством позиции 31 детектора цели в течение времени t1-t4 в примере, показанном на фиг. 4. Время t1 является самым ранним временем, и время t4 является последним временем.
[0027] Затем, на этапе S07, модуль 32 оценки величины перемещения интегрирует величину перемещения транспортного средства V, вычисленную на основе результата обнаружения из группы 5 датчиков транспортного средства, и в силу этого вычисляет позицию транспортного средства V в одометрической системе координат. Для одометрической системы координат, азимутальный угол транспортного средства V может задаваться равным 0 градусов, со ссылкой на позицию транспортного средства V, в качестве исходной точки, в то время, когда мощность подается в устройство оценки собственной позиции, или обработка сбрасывается. Интегрирование величины перемещения транспортного средства V выполняется в одометрической системе координат.
[0028] Фиг. 6 является схемой, показывающей результат интегрирования величины (M1, M2, M3 и M4) перемещения транспортного средства V, вычисленной на основе результата обнаружения посредством группы 5 датчиков транспортного средства в примере, показанном на фиг. 5(a)-5(d). Величина перемещения включает в себя изменение позиции и ориентации (θ: угла рыскания) в двумерной системе координат. Таким образом, модуль 32 оценки величины перемещения вычисляет позицию (Xo, Yo) транспортного средства V в одометрической системе координат.
[0029] На этапе S07, модуль 33 хранения целевых позиций сохраняет позицию, в которую относительная позиция цели в системе координат транспортного средства, обнаруженная модулем 31 обнаружения позиции цели, перемещается на величину перемещения транспортного средства V, определенную модулем 32 оценки величины перемещения, в качестве данных целевой позиции.
[0030] Фиг. 7 является схемой, показывающей данные (71a-71d, 72a-72d и 73a-73d) целевой позиции, преобразованные в одометрическую систему координат в примере, показанном на фиг. 5 и 6. Таким образом, модуль 33 хранения целевых позиций преобразует позицию цели в системе координат датчика, измеренную в прошлом (t1, t2, t3...), в позицию цели в одометрической системе координат на основе величины (M1, M2, M3, M4) перемещения транспортного средства V, и сохраняет преобразованные данные позиции в качестве данных целевой позиции.
[0031] Переходя к этапу S09, модуль 35 выбора целевой позиции извлекает данные (71a-71d, 72a-72d и 73a-73d) целевой позиции, указывающие границу полосы движения, на основе множества сохраненных данных целевой позиции и вычисляет надежность относительной позиции относительно транспортного средства V относительно извлеченных данных (71a-71d, 72a-72d и 73a-73d) целевой позиции.
[0032] Во-первых, как показано на фиг. 8, модуль 34 извлечения прямых линий извлекает линейную информацию (N1, N2 и N3) на основе данных (71a-71d, 72a-72d и 73a-73d) целевой позиции, сохраненных в модуле 33 хранения целевых позиций. Линейная аппроксимация применяется к результату обнаружения линии дорожной разметки (данным целевой позиции). Кроме того, модуль 35 выбора целевой позиции определяет надежность относительной позиции данных целевой позиции относительно транспортного средства V в соответствии с разностью между расстоянием от транспортного средства V до цели, полученной на основе относительной позиции цели, и предполагаемым расстоянием от транспортного средства V до цели. Модуль 35 выбора целевой позиции определяет то, что надежность является более высокой по мере того, как вышеуказанная разность меньше.
[0033] Например, модуль 34 извлечения прямых линий аппроксимирует прямые линии (N2 и N3) относительно данных (72 и 73) целевой позиции, указывающих границу полосы движения, показанную на фиг. 9. Модуль 35 выбора целевой позиции измеряет соответствующие расстояния в направлении ширины транспортного средства от транспортного средства V до соответствующих прямых линий (N2 и N3). Когда ширина полосы движения составляет 4 метра, и транспортное средство V движется в центре полосы движения, соответствующие предполагаемые расстояния от центра транспортного средства V до соответствующих линий дорожной разметки составляют 2 метра. Когда абсолютное значение разности между расстоянием от транспортного средства V до прямой линии (N2, N3) и предполагаемым расстоянием (2 метра), включающим в себя отклонение позиции транспортного средства V относительно полосы движения, ошибку обнаружения и т.п., равно 1 метру или больше, определяется то, что имеется высокая вероятность того, что расстояние от транспортного средства V до прямой линии (N2, N3) является неточным. В примере, показанном на фиг. 3, абсолютное значение разности между расстоянием WL и оцененным расстоянием (2 метра) меньше 1 метра, но абсолютное значение разности между расстоянием LR и оцененным расстоянием (2 метра) равно или больше 1 метра. Соответственно, модуль 35 выбора целевой позиции низко оценивает надежность данных 73 целевой позиции, указывающих правостороннюю границу полосы движения, и высоко оценивает надежность данных 72 целевой позиции, указывающих левостороннюю границу полосы движения. Модуль 35 выбора целевой позиции исключает данные 73 целевой позиции, надежность которых низко оценивается, и приспосабливает только данные 72 целевой позиции, надежность которых высоко оценивается.
[0034] Вышеуказанный способ определения надежности на основе разности с предполагаемым расстоянием является применимым не только к границам полос движения, например, линиям дорожной разметки и бордюрам, но является применимым также к другим целям. Например, дорожные сооружения, например, дорожные знаки, светофоры и столбы линии электропередач, присутствуют в боковых полосах. Соответственно, предполагаемое расстояние может задаваться на основе ширины полосы движения, и в силу этого разность между относительным расстоянием до дорожного сооружения, обнаруженного из транспортного средства V, и предполагаемым расстоянием может вычисляться.
[0035] Модуль 35 выбора целевой позиции дополнительно определяет надежность на основе атрибута цели относительно данных 72 целевой позиции, выбранных на основе вышеуказанной разности с предполагаемым расстоянием. Более конкретно, модуль 35 выбора целевой позиции определяет надежность данных 72 целевой позиции на основе атрибута цели, оцененного модулем 37 оценки атрибутов целей, и дополнительно сокращает данные целевой позиции, которые должны использоваться для оценки собственной позиции.
[0036] Например, поскольку обнаруживаемая область сплошной линии превышает обнаруживаемую область пунктирной линии, даже если обе линии представляют собой идентичную линию дорожной разметки, можно определять то, что точность обнаружения (т.е. надежность) относительной позиции является относительно высокой. Путем обращения к картографической информации, можно заранее указывать то, представляет собой обнаруженная линия дорожной разметки сплошную линию или пунктирную линию. Когда оказывается то, что линия дорожной разметки, позиционированная на одной стороне транспортного средства V, представляет собой сплошную линию, и линия дорожной разметки, позиционированная на другой стороне, представляет собой пунктирную линию, определяется то, что надежность данных целевой позиции, указывающих линию дорожной разметки, позиционированную на одной стороне, является относительно высокой, даже если ошибки обнаружения обеих сторон или соответствующие расстояния от транспортного средства V являются приблизительно идентичными. Следовательно, данные целевой позиции, указывающие линию дорожной разметки, позиционированную в одной стороне, выбираются.
[0037] Тип линии дорожной разметки представляет собой просто пример атрибута целей, и в силу этого другие атрибуты целей также могут применяться к нему. Например, относительно цвета линии секций, проще обнаруживать линии дорожной разметки, чем желтые линии, и в силу этого надежность линий дорожной разметки высоко определяется. Кроме того, надежности различной цели могут определяться относительно друг друга. Например, при сравнении стоп-линий и пешеходных переходов друг с другом, поскольку число характерных частей пешеходных переходов превышает число стоп-линий, надежность пешеходных переходов высоко определяется.
[0038] Модуль 35 выбора целевой позиции дополнительно определяет надежность данных целевой позиции на основе периода времени, когда данные целевой позиции могут непрерывно обнаруживаться относительно данных целевой позиции, выбранных на основе вышеуказанного атрибута цели.
[0039] Не только линии дорожной разметки, но и любые цели, присутствующие в общих окружениях, не всегда могут непрерывно обнаруживаться с постоянной надежностью вследствие ухудшения характеристик вследствие старения, затемнения и других эффектов. Кроме того, в случае приспособления системы слияния данных датчиков для охвата различных направлений посредством множества датчиков, также считается, что обнаружение только определенного направления всегда является неопределенным. Следовательно, информация относительно линии дорожной разметки или границы полосы движения оценивается вместе с периодом времени обнаружения этого. Затем, только когда она непрерывно обнаруживается в течение определенного периода времени (например, 10 секунд) или больше, определяется то, что ее надежность является высокой, и эти данные целевой позиции должны выбираться.
[0040] Модуль 35 выбора целевой позиции дополнительно определяет надежность данных целевой позиции на основе распределения ошибок, когда данные целевой позиции границы полосы движения линейно аппроксимируются относительно данных целевой позиции, выбранных на основе вышеуказанного непрерывного периода времени обнаружения. Другими словами, модуль 35 выбора целевой позиции определяет надежность данных целевой позиции на основе линейной информации (прямой линии для аппроксимации), извлеченной модулем 34 извлечения прямых линий, и дополнительно сокращает данные целевой позиции, которые должны использоваться для оценки собственной позиции.
[0041] Модуль 35 выбора целевой позиции определяет то, обнаруживаются или нет множество параллельных границ полос движения в качестве данных целевой позиции, которые указывают границы полос движения (например, линии дорожной разметки) для указания полосы движения, в которой движется транспортное средство V. Кроме того, когда множество параллельных границ полос движения обнаруживаются, надежность данных целевой позиции в диапазоне, который может аппроксимироваться с помощью прямой линии в результатах обнаружения линий дорожной разметки (данных целевой позиции), высоко оценивается, и выбирает высокооцененные данные целевой позиции в качестве данных целевой позиции, которые должны использоваться для оценки собственной позиции. Например, как показано на фиг. 10, обнаруживаются данные (72j, 72k, 73j и 73k) целевой позиции, указывающие множество параллельных границ полос движения, которые указывают полосу движения, в которой движется транспортное средство V. Модуль 34 извлечения прямых линий применяет линейную аппроксимацию к данным целевой позиции, указывающим границу полосы движения. Модуль 35 выбора целевой позиции выбирает данные (72j и 73j) целевой позиции, включенные в диапазон LA, который может аппроксимироваться с помощью прямых линий, из числа данных (72j, 72k, 73j и 73k) целевой позиции. В это время, модуль 35 выбора целевой позиции расширяет диапазон LA, который может аппроксимироваться с помощью прямых линий относительно транспортного средства V. Например, секция, в которой число данных целевой позиции, имеющих минимальное расстояние данных целевой позиции, находящихся в пределах диапазона от-15 см до+15 см относительно аппроксимирующей линии, равно или больше 80%, задается в качестве диапазона LA, который может аппроксимироваться с помощью прямых линий. С другой стороны, данные (72k и 73k) целевой позиции, не включенные в диапазон LA, который может аппроксимироваться с помощью прямых линий, исключаются.
[0042] Помимо этого, как показано на фиг. 11, когда полоса движения, в которой движется транспортное средство V, представляет собой искривленную секцию, аппроксимирующая линия не всегда представляет собой прямую линию. В этом случае, модуль 34 извлечения прямых линий выполняет аппроксимацию на кривой вместо линейной аппроксимации (аппроксимации на прямой линии). Модуль 35 выбора целевой позиции высоко оценивает надежность данных (72m и 73m) целевой позиции, включенных в диапазон LB, который может аппроксимироваться с помощью кривых линий (N2 и N3), и выбирает высокооцененные данные целевой позиции в качестве данных целевой позиции, которые должны использоваться для оценки собственной позиции. С другой стороны, данные (72n и 73n) целевой позиции, не включенные в диапазон LB, который может аппроксимироваться с помощью кривых линий, исключаются.
[0043] В настоящем варианте осуществления, показан пример, в котором модуль 35 выбора целевой позиции определяет надежность относительной позиции данных целевой позиции относительно транспортного средства V в порядке (1) разности между расстоянием от транспортного средства V до цели и предполагаемым расстоянием, (2) атрибута цели, (3) непрерывного периода времени обнаружения и (4) распределения ошибок, когда данные целевой позиции, указывающие границу полосы движения, линейно аппроксимируются. Настоящее изобретение не ограничено таким примером, и последовательность определения надежности может произвольно заменяться. Альтернативно, только часть обработки определения из числа обработки определения по (1)-(4) также может выполняться. Кроме того, всесторонняя оценка может выполняться путем количественного определения каждого определения надежности. Например, при каждом определении надежности, точки оценки могут выдаваться на нескольких стадиях, так что они добавляются в нее, и в силу этого общая точка оценки может вычисляться. Следовательно, надежность обнаруженной цели может задаваться количественно с тем, чтобы определяться.
[0044] Затем, переходя к этапу S13, модуль 36 оценки собственной позиции сравнивает данные целевой позиции, выбранные модулем 35 выбора целевой позиции, с позицией цели в картографической информации 41. Другими словами, позиция цели в картографической информации 41 и данные целевой позиции, определенные таким образом, что они имеют высокую надежность, модулем 35 выбора целевой позиции, согласуются между собой.
[0045] Переходя к этапу S15, модуль 36 оценки собственной позиции оценивает собственную позицию транспортного средства V путем выполнения вышеуказанного сравнения (согласования с картой) позиции цели. Более конкретно, модуль 36 оценки собственной позиции оценивает позицию и угол ориентации всех трех степеней свободы, состоящих из позиции в направлении восток-запад транспортного средства V (координаты X), позиции в направлении север-юг (координаты Y) и азимутального угла (угла θ рыскания). Известный способ оценки собственной позиции может использоваться в качестве способа оценки позиции на карте. Переходя к этапу S17, модуль 36 оценки собственной позиции выводит оцененную собственную позицию транспортного средства V.
[0046] Помимо этого, итеративный алгоритм ближайших точек (ICP) может использоваться для сравнения на этапе S13. В это время, относительно линий секций, например, модуль 36 оценки собственной позиции согласует конечные точки их обоих концов в качестве точки оценки из числа позиций цели, включенной в картографическую информацию 41. Кроме того, поскольку на данные целевой позиции в меньшей степени оказывает влияние ошибка одометрии, так как они находятся ближе к транспортному средству V (группа 1 датчиков окрестностей), модуль 36 оценки собственной позиции может увеличивать число точек оценки для цели около транспортного средства V путем линейного дополнения цели и может сокращать число точек оценки для цели на большом расстоянии от транспортного средства V.
[0047] Как упомянуто выше, согласно вариантам осуществления, могут получаться следующая работа/функциональные преимущества.
[0048] Поскольку данные целевой позиции выбираются на основе надежности относительной позиции данных целевой позиции относительно транспортного средства V, данные целевой позиции, которые оцениваются как имеющие большое количество ошибок относительной позиции, могут исключаться, и в силу этого повышается точность оценки собственной позиции.
[0049] Секция 35 выбора целевой позиции определяет то, что надежность относительной позиции данных целевой позиции относительно транспортного средства является более высокой по мере того, как разность между расстоянием от транспортного средства V до цели и предполагаемым расстоянием меньше. Как результат, поскольку данные целевой позиции, которые оцениваются как имеющие большую ошибку в относительной позиции, могут надлежащим образом исключаться, может повышаться точность оценки собственной позиции.
[0050] Модуль 35 выбора целевой позиции определяет надежность относительной позиции данных целевой позиции относительно транспортного средства V на основе атрибута цели. Например, при сравнении сплошной линии и пунктирной линии линий дорожной разметки друг с другом, модуль 35 выбора целевой позиции определяет то, что сплошная линия, допускающая устойчивое получение данных целевой позиции, является более надежной, чем пунктирная линия. Соответственно, поскольку данные целевой позиции, которые оцениваются как имеющие большое количество ошибок в относительной позиции, могут надлежащим образом определяться, может повышаться точность оценки собственной позиции.
[0051] Модуль 35 выбора целевой позиции определяет надежность относительной позиции данных целевой позиции относительно транспортного средства V на основе периода времени, когда данные целевой позиции могут непрерывно обнаруживаться. Как результат, можно стабильно и точно оценивать собственную позицию.
[0052] Модуль 35 выбора целевой позиции выбирает данные целевой позиции, имеющие высокую надежность относительной позиции относительно транспортного средства V, когда обнаруживаются данные целевой позиции, указывающие множество параллельных границ полос движения, которые указывают полосу движения, в которой движется транспортное средство V. Следовательно, граница полосы движения, имеющая высокую точность позиции, может выбираться, и точность оценки собственной позиции становится более высокой.
[0053] Секция 35 выбора целевой позиции определяет то, что надежность относительной позиции данных целевой позиции, указывающих границу полосы движения относительно транспортного средства V, является более высокой по мере того, как ошибка из аппроксимирующей линии при аппроксимации границы полосы движения меньше. Следовательно, граница полосы движения, имеющая высокую точность обнаруженной позиции, может выбираться, и точность оценки для оценки собственной позиции дополнительно становится более высокой.
[0054] Выше описываются варианты осуществления настоящего изобретения, в качестве раскрытия сущности, включающего в себя ассоциированное описание и чертежи, которое должно истолковываться как иллюстративное, не ограничивающее. Это раскрытие сущности проясняет множество альтернативных вариантов осуществления, рабочих примеров и технологий работы для специалистов в данной области техники.
[0055] Движущийся объект не ограничен транспортным средством V в качестве движущихся объектов, которые перемещаются на материке, но включает в себя суда, самолет, космический корабль и другие движущиеся объекты.
[0056] Функции, описанные в соответствующих вариантах осуществления, могут реализовываться в одной или более схем обработки. Такая схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Кроме того, обрабатывающее устройство включает в себя специализированную интегральную схему (ASIC) и/или такое устройство, как традиционный схемный компонент, выполненное с возможностью выполнять функции, описанные в соответствующих вариантах осуществления.
Список номеров ссылок
[0057] 1 - группа датчиков окрестностей (датчик обнаружения цели)
31 - модуль обнаружения целевой позиции (датчик обнаружения цели)
32 - модуль оценки величины перемещения (схема оценки собственной позиции)
33 - модуль хранения целевых позиций (схема оценки собственной позиции)
34 - модуль извлечения прямых линий (схема оценки собственной позиции)
35 - модуль выбора целевой позиции (схема оценки собственной позиции)
36 - модуль оценки собственной позиции (схема оценки собственной позиции)
37 - модуль оценки атрибутов целей (схема оценки собственной позиции)
41 - картографическая информация
61 - высота уступа (цель)
62, 63 - линия дорожной разметки (цель)
72j, 72k, 72m, 72n - данные целевой позиции
73j, 73k, 73n, 73m - данные целевой позиции
M1-M4 - величина перемещения движущегося объекта
N1, N2, N3 - линия, аппроксимирующая множество данных целевой позиции
V - транспортное средство (движущийся объект)
Изобретение относится к системам определения положения транспортного средства. Способ оценки собственной позиции с использованием датчика обнаружения цели и схемы оценки собственной позиции. Датчик обнаружения цели монтируется в движущемся объекте, причем датчик обнаружения цели выполнен с возможностью обнаруживать относительную позицию между целью, присутствующей в окрестностях движущегося объекта, и движущимся объектом. Схема оценки собственной позиции выполнена с возможностью сохранять позицию, в которую относительная позиция перемещается на величину перемещения движущегося объекта, в качестве данных целевой позиции и сравнивать сохраненные данные целевой позиции с картографической информацией, включающей в себя информацию позиции относительно цели, присутствующей на дороге или вокруг дороги, за счет этого оценивая собственную позицию. Способ оценки собственной позиции содержит этапы, на которых выбирают данные целевой позиции, из сохраненных данных целевой позиции, на основе надежности относительной позиции данных целевой позиции относительно движущегося объекта и сравнивают выбранные данные целевой позиции с картографической информацией, за счет этого оценивая собственную позицию. Достигается повышение точности определения положения транспортного средства 2 н. и 5 з.п. ф-лы, 14 ил.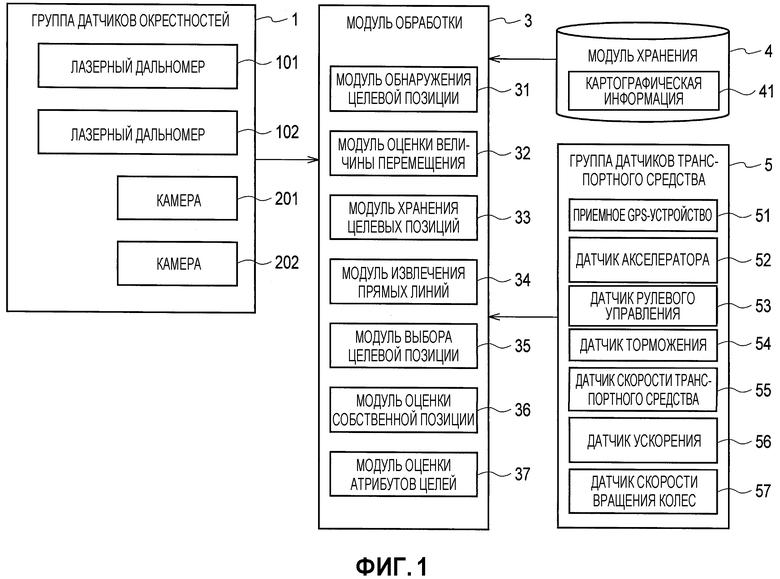
1. Способ оценки собственной позиции с использованием датчика обнаружения цели и схемы оценки собственной позиции,
причем датчик обнаружения цели монтируется в движущемся объекте, причем датчик обнаружения цели выполнен с возможностью обнаруживать относительную позицию между целью, присутствующей в окрестностях движущегося объекта, и движущимся объектом,
причем схема оценки собственной позиции выполнена с возможностью сохранять позицию, в которую относительная позиция перемещается на величину перемещения движущегося объекта, в качестве данных целевой позиции и сравнивать сохраненные данные целевой позиции с картографической информацией, включающей в себя информацию позиции относительно цели, присутствующей на дороге или вокруг дороги, за счет этого оценивая собственную позицию, которая представляет собой текущую позицию движущегося объекта,
при этом способ оценки собственной позиции содержит этапы, на которых:
- выбирают данные целевой позиции, подлежащие сравнению с картографической информацией, из сохраненных данных целевой позиции, на основе надежности относительной позиции данных целевой позиции относительно движущегося объекта; и
- сравнивают выбранные данные целевой позиции с картографической информацией, за счет этого оценивая собственную позицию.
2. Способ оценки собственной позиции по п. 1, в котором надежность определяется таким образом, что надежность является более высокой по мере того, как разность между расстоянием от движущегося объекта до цели, полученным из относительной позиции, и предполагаемым расстоянием от движущегося объекта до цели является меньшей.
3. Способ оценки собственной позиции по п. 1 или 2, в котором надежность определяется на основе атрибута цели.
4. Способ оценки собственной позиции по п. 1 или 2, в котором надежность определяется на основе периода времени, когда данные целевой позиции могут непрерывно обнаруживаться.
5. Способ оценки собственной позиции по п. 1 или 2, в котором данные целевой позиции, имеющие высокую надежность относительной позиции относительно движущегося объекта, выбираются, когда обнаруживаются данные целевой позиции, указывающие множество параллельных границ полос движения, которые указывают полосу движения, в которой движется движущийся объект.
6. Способ оценки собственной позиции по п. 5, в котором надежность определяется таким образом, что надежность относительной позиции данных целевой позиции, указывающих границу полосы движения относительно движущегося объекта, является более высокой по мере того, как ошибка между линией, аппроксимирующей множество данных целевой позиции, указывающих границу полосы движения, и множеством данных целевой позиции является меньшей.
7. Устройство оценки собственной позиции, содержащее:
- датчик обнаружения цели, смонтированный в движущемся объекте, причем датчик обнаружения цели выполнен с возможностью обнаруживать относительную позицию между целью, присутствующей в окрестностях движущегося объекта, и движущимся объектом; и
- схему оценки собственной позиции, выполненную с возможностью сохранять позицию, в которую относительная позиция перемещается на величину перемещения движущегося объекта, в качестве данных целевой позиции, чтобы выбирать данные целевой позиции, подлежащие сравнению с картографической информацией, из сохраненных данных целевой позиции, на основе надежности относительной позиции данных целевой позиции относительно движущегося объекта, и сравнивать выбранные данные целевой позиции с картографической информацией, включающей в себя информацию позиции относительно цели, присутствующей на карте, за счет этого оценивая собственную позицию, которая представляет собой текущую позицию движущегося объекта.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИОННОЙ ПОГРЕШНОСТИ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2254558C2 |
| Токарный резец | 1924 |
|
SU2016A1 |

