Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу оценки собственного положения, которые оценивают собственное положение подвижного объекта.
Уровень техники
[0002] Разработана технология оценки собственного положения подвижного объекта, которая включает в себя: распознавание окружения подвижного объекта с помощью камеры и лазерного дальномера, установленных в подвижном объекте; и получение положения на карте и угла ориентации подвижного объекта посредством сопоставления результатов распознавания с картой. Традиционный пример этой технологии раскрыт в патентном документе 1.
[0003] В технологии оценки собственного положения по патентному документу 1 предыдущие записи результатов распознавания и величин перемещения, вычисленных посредством использования импульсов скорости вращения колёс, гироскопа и т.п., накапливаются в ассоциации друг с другом, и положение и угол ориентации подвижного объекта оцениваются с помощью регулирования, осуществляемого таким образом, что накопленные данные и карта совпадают между собой. Кроме того, в технологии оценки собственного положения патентного документа 1, использование записей результатов распознавания, полученных в пределах фиксированного расстояния в любое время, обеспечивает стабильную оценку собственного положения подвижного объекта посредством исключения влияния скорости перемещения подвижного объекта.
Список цитируемых источников
Патентные документы
[0004] Патентный документ 1. Публикация заявки на патент Японии № 2008-250906
Раскрытие изобретения
[0005] Тем не менее, в традиционной технологии оценки собственного положения, описанной выше, использование записей результатов распознавания, полученных в пределах фиксированного расстояния, приводит к проблеме, состоящей в том, что в ситуации, в которой ошибка обнаружения величины перемещения увеличивается, отклонение между результатами распознавания и картой увеличивается настолько, что оценка собственного положения становится затруднительной.
[0006] Настоящее изобретение предложено в связи с вышеизложенным, и его задача заключается в создании устройства и способа оценки собственного положения, которые позволяют стабильно оценивать собственное положение с высокой точностью даже в ситуации, в которой ошибка обнаружения величины перемещения увеличивается.
[0007] Для решения вышеуказанной задачи устройство оценки собственного положения и способ оценки собственного положения в соответствии с некоторыми вариантами осуществления настоящего изобретения обнаруживают положение ориентира для ориентира, присутствующего в окружении подвижного объекта, и обнаруживают величину перемещения подвижного объекта. Затем устройство и способ накапливают, в качестве фрагментов данных положений ориентиров, положения ориентиров, каждое из которых получается посредством перемещения обнаруженного положения ориентира на величину перемещения, и получают картографическую информацию, включающую в себя положения ориентиров для ориентиров, присутствующих на карте, посредством контроллера. Затем устройство и способ сопоставляют фрагменты данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценивают собственное положение подвижного объекта, причём определённая область задаётся на основании записей перемещения подвижного объекта, движущегося в текущее положение.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы оценки собственного положения, включающей в себя устройство оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим положения установки лазерных дальномеров и камер в транспортном средстве.
Фиг. 3 является блок-схемой способа, иллюстрирующей этапы обработки при обработке оценки собственного положения посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является видом для пояснения систем координат, используемых в устройстве оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
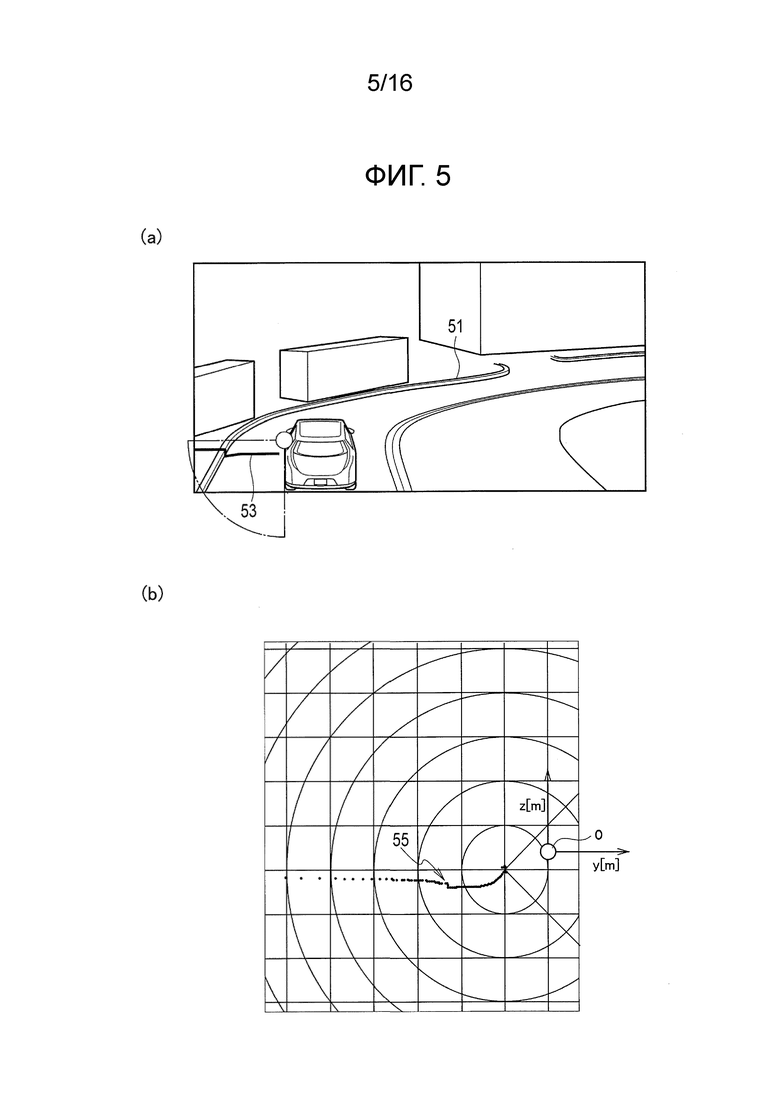
Фиг. 5 является видом для пояснения способа обнаружения посредством лазерного дальномера в устройстве оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
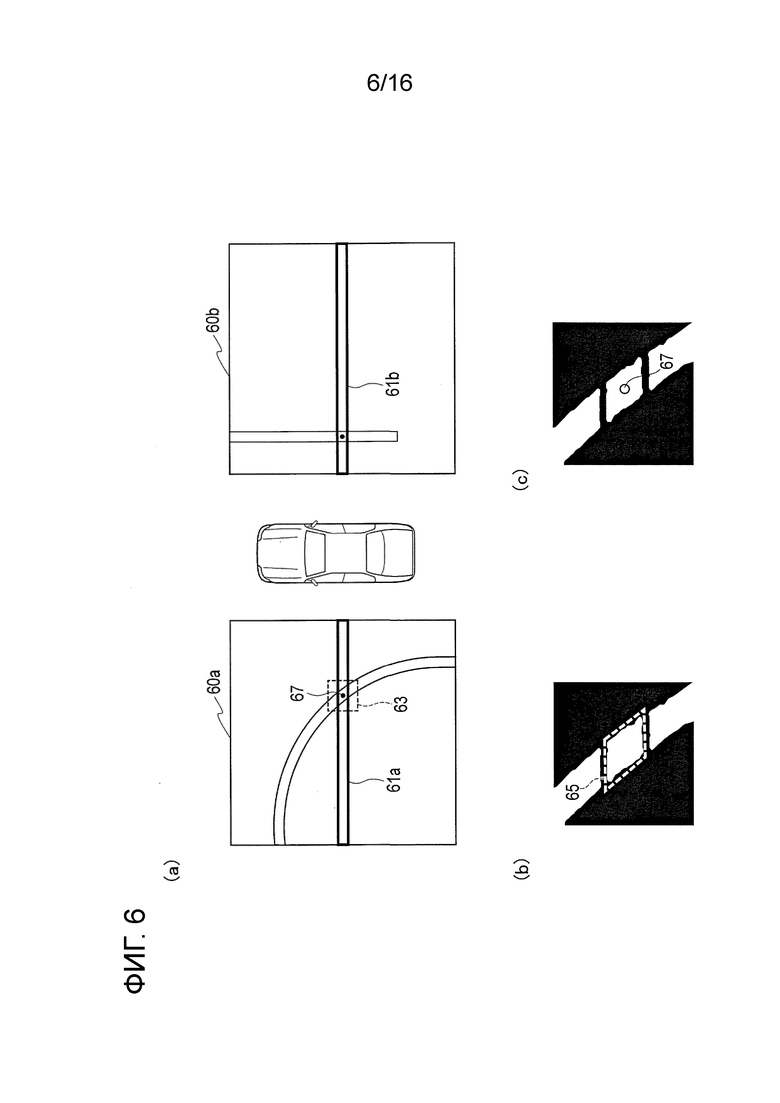
Фиг. 6 является видом для пояснения способа обнаружения сигнальной линии дорожной разметки с помощью камеры в устройстве оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
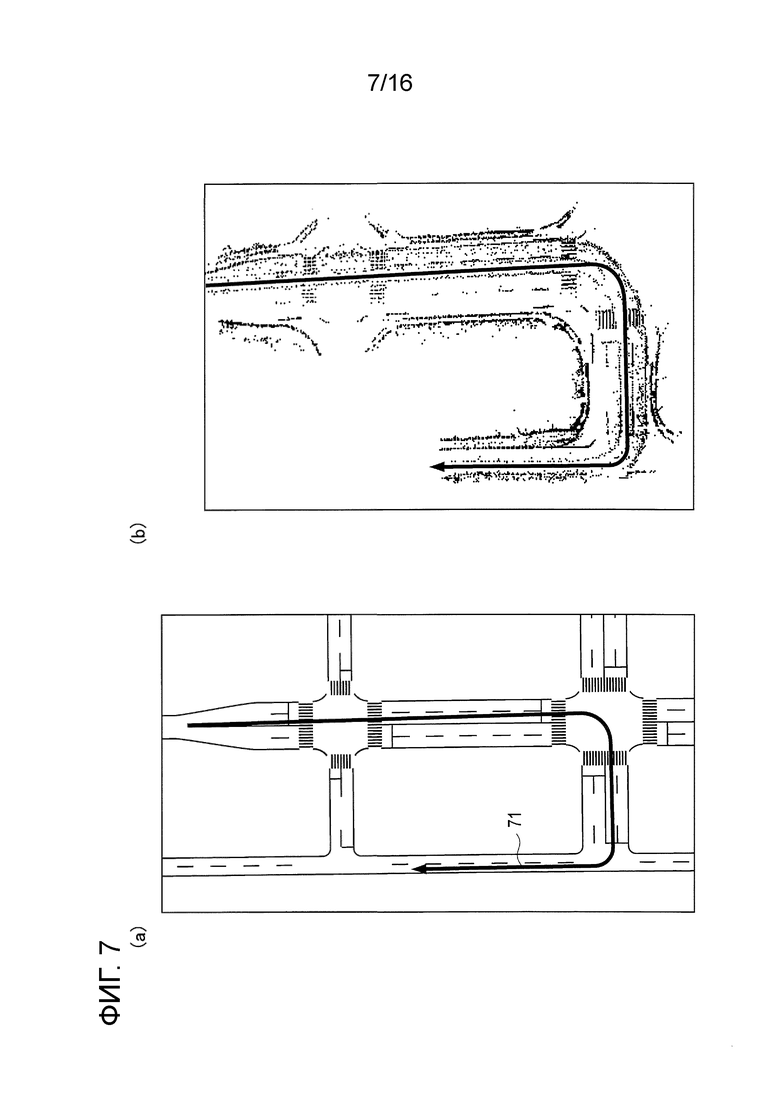
Фиг. 7 является видом, иллюстрирующим результат обнаружения ориентиров посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
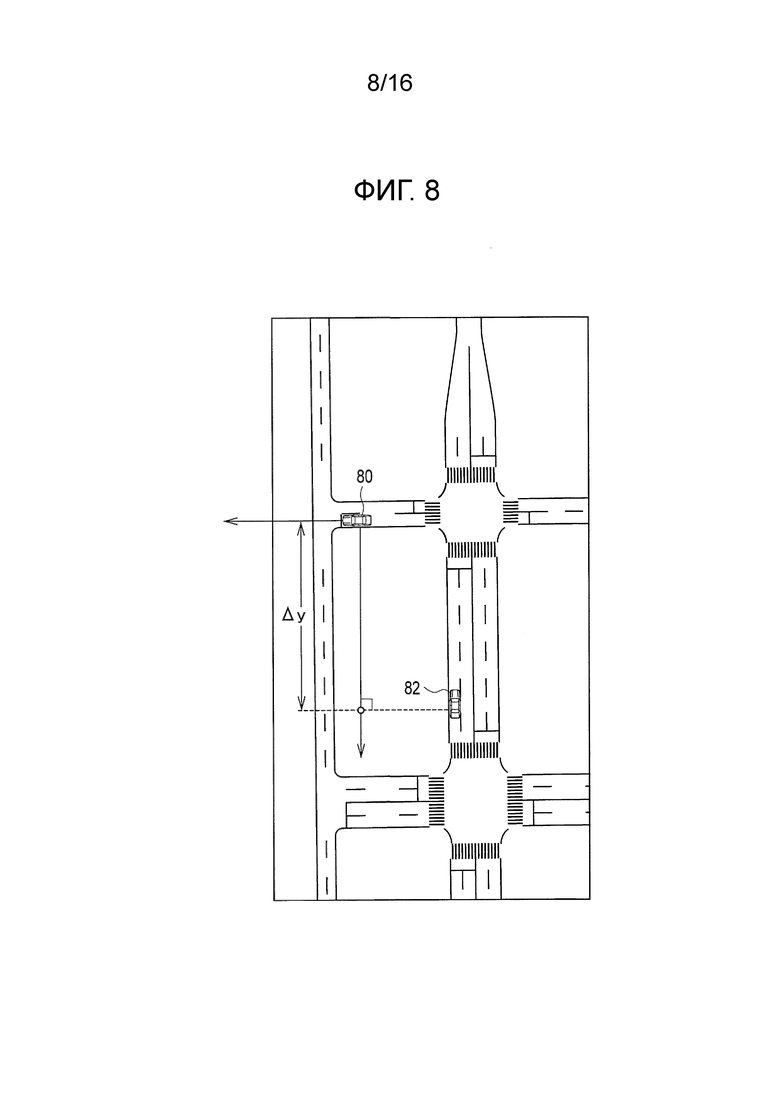
Фиг. 8 является видом для пояснения способа оценки ошибки обнаружения величины перемещения посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
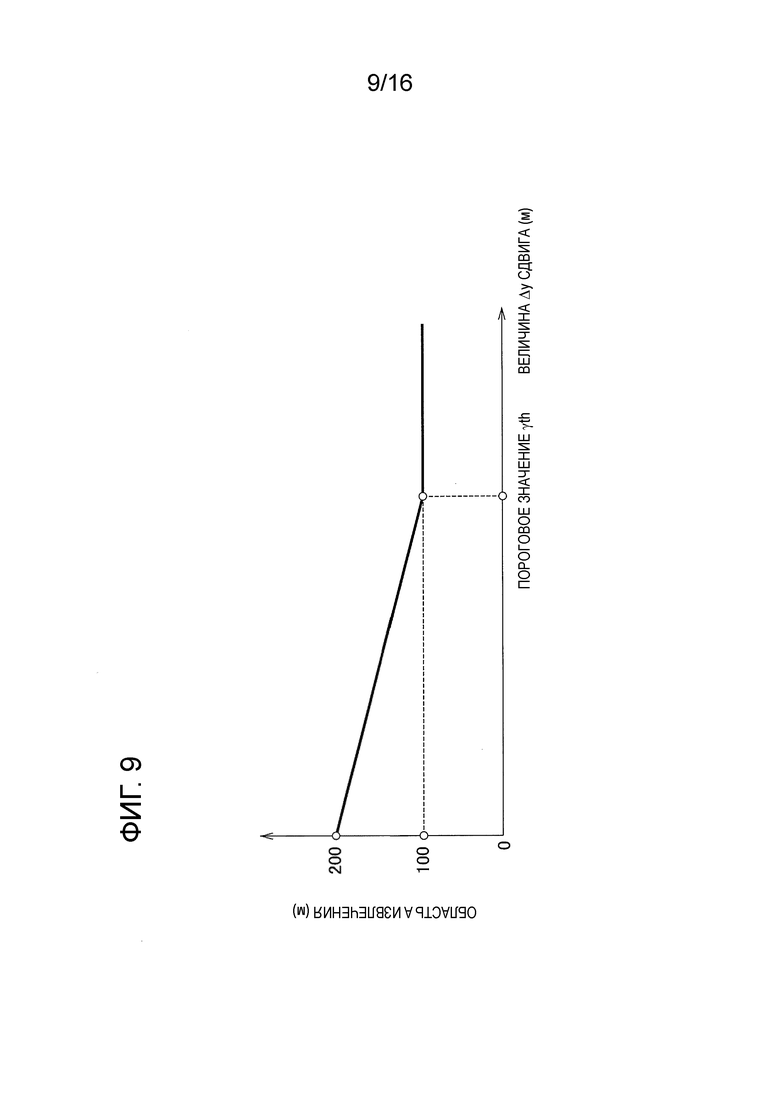
Фиг. 9 является видом для пояснения способа задания области извлечения посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
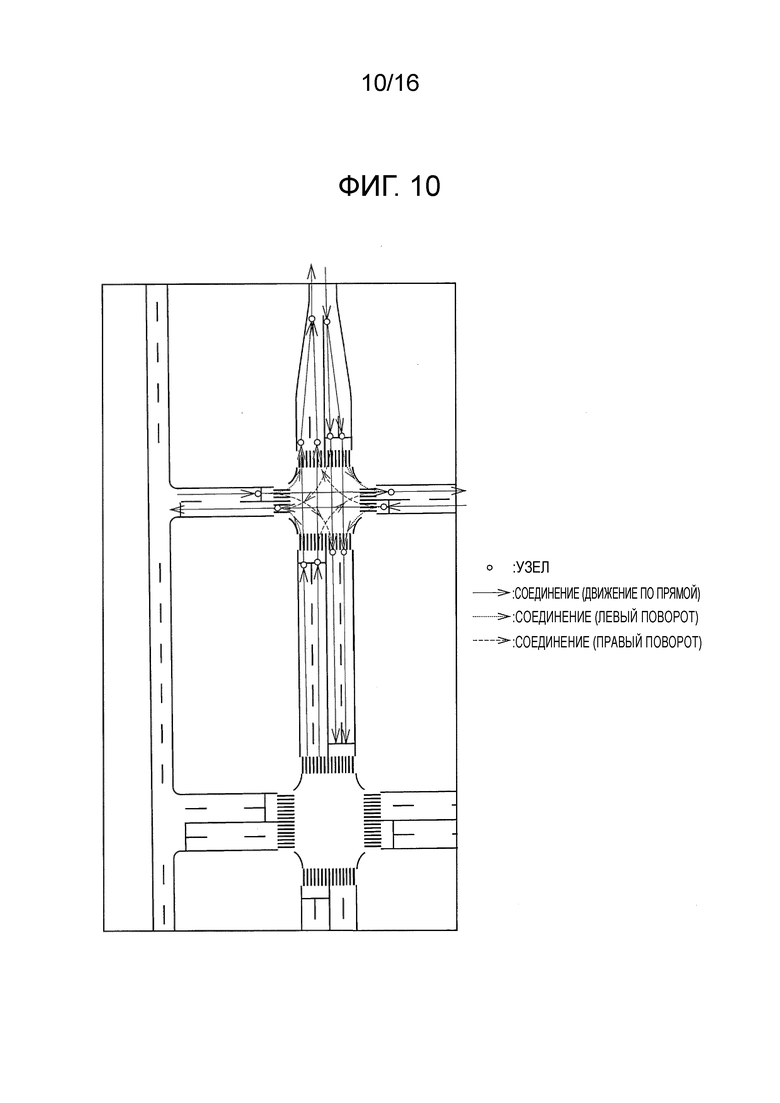
Фиг. 10 является видом для пояснения информации соединений и узлов, полученной посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
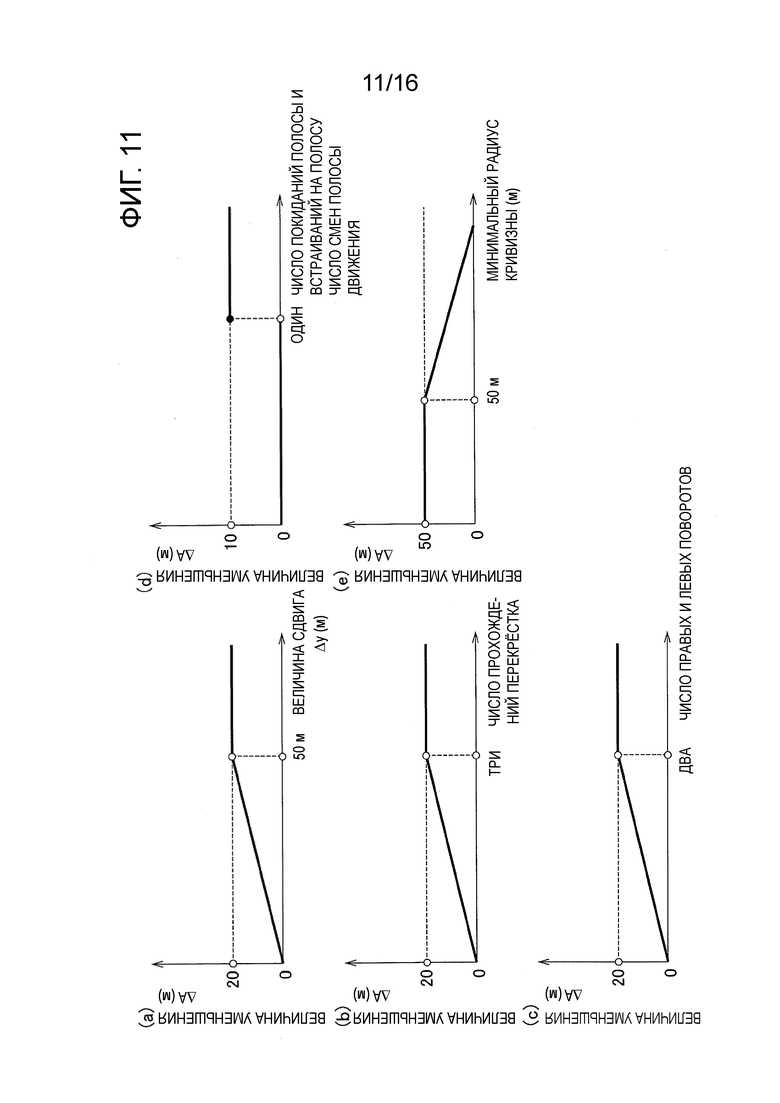
Фиг. 11 (a)-(e) являются видами для пояснения способа задания области извлечения посредством устройства оценки собственного положения согласно пятому модифицированному примеру первого варианта осуществления настоящего изобретения.
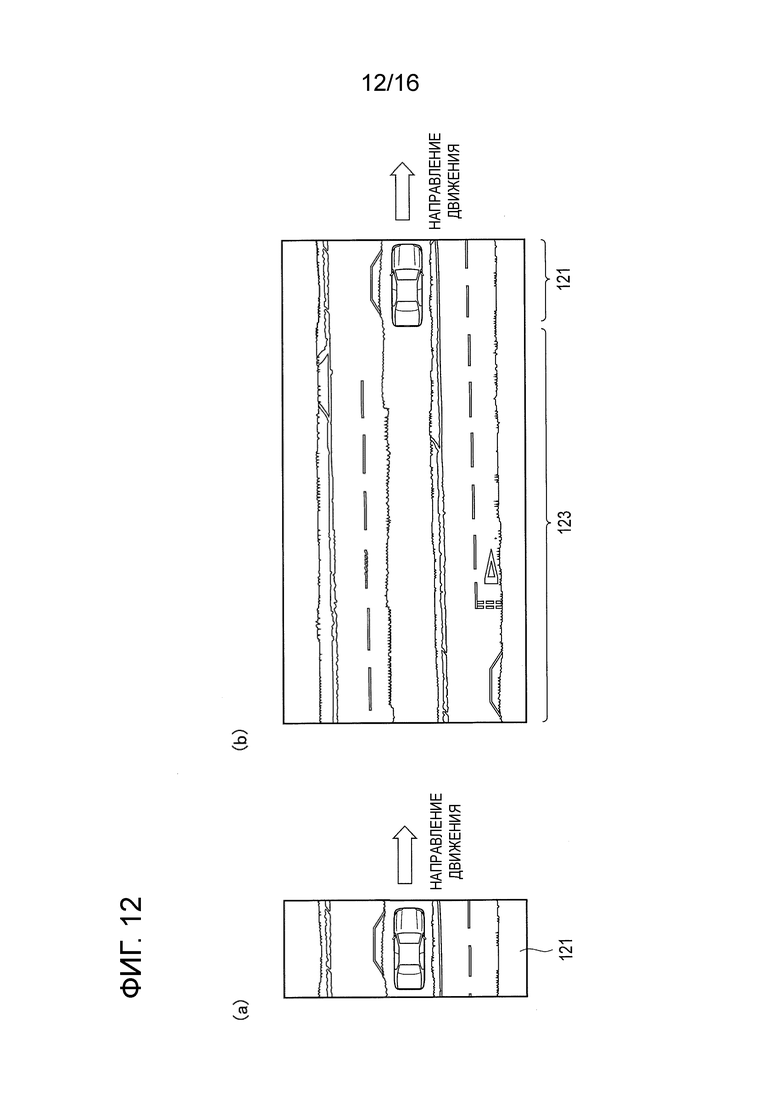
Фиг. 12 является видом для пояснения традиционной технологии оценки собственного положения.
Фиг. 13 является видом для пояснения традиционной технологии оценки собственного положения.
Фиг. 14 является видом для пояснения традиционной технологии оценки собственного положения.
Фиг. 15 является видом для пояснения способа задания области извлечения посредством устройства оценки собственного положения согласно первому варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой способа, иллюстрирующей этапы обработки при обработке оценки собственного положения посредством устройства оценки собственного положения согласно второму варианту осуществления настоящего изобретения.
Осуществление изобретения
[0009] Ниже описаны первый и второй варианты осуществления, в которых применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Первый вариант осуществления
Конфигурация системы оценки собственного положения
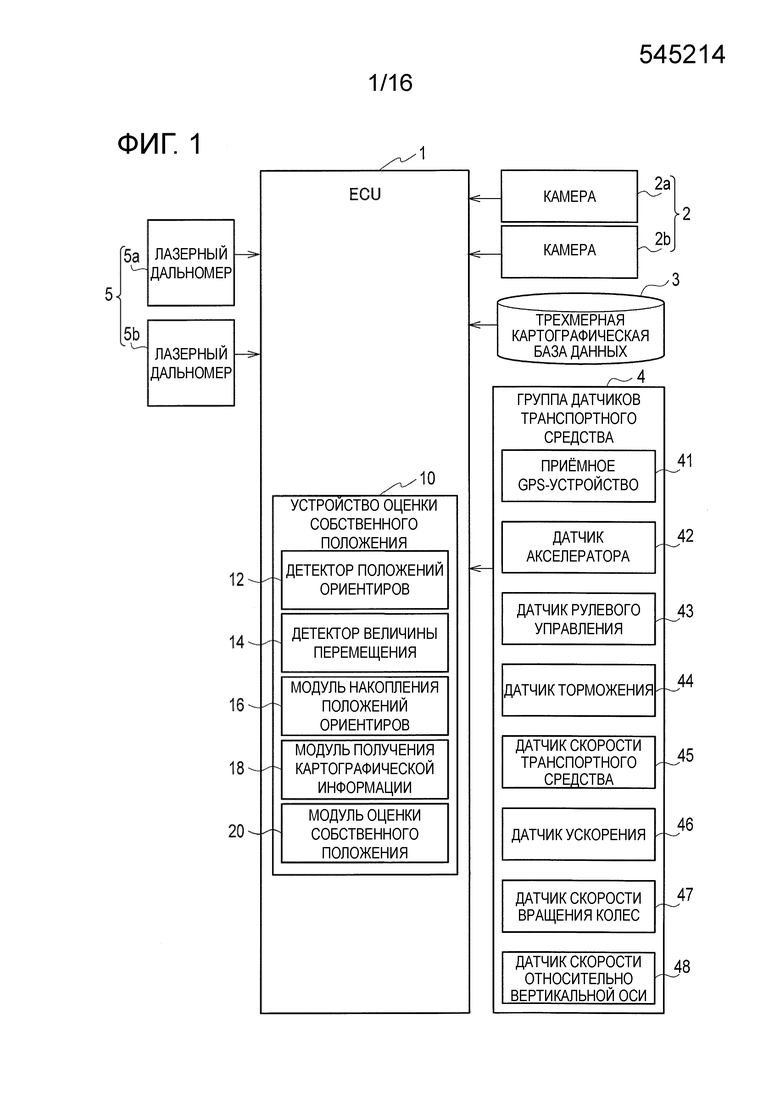
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию системы оценки собственного положения, включающей в себя устройство оценки собственного положения согласно варианту осуществления. Как проиллюстрировано на фиг. 1, система оценки собственного положения согласно варианту осуществления включает в себя ECU 1, камеры 2, трехмерную картографическую базу 3 данных, группу 4 датчиков транспортного средства и лазерные дальномеры 5.
[0011] Здесь ECU 1 представляет собой электронный блок управления, включающий в себя ROM, RAM, вычислительную схему и т.п. Программа для реализации устройства 10 оценки собственного положения согласно варианту осуществления сохраняется в ROM. Следует отметить, что ECU 1 также может служить в качестве ECU, используемого для других видов управления.
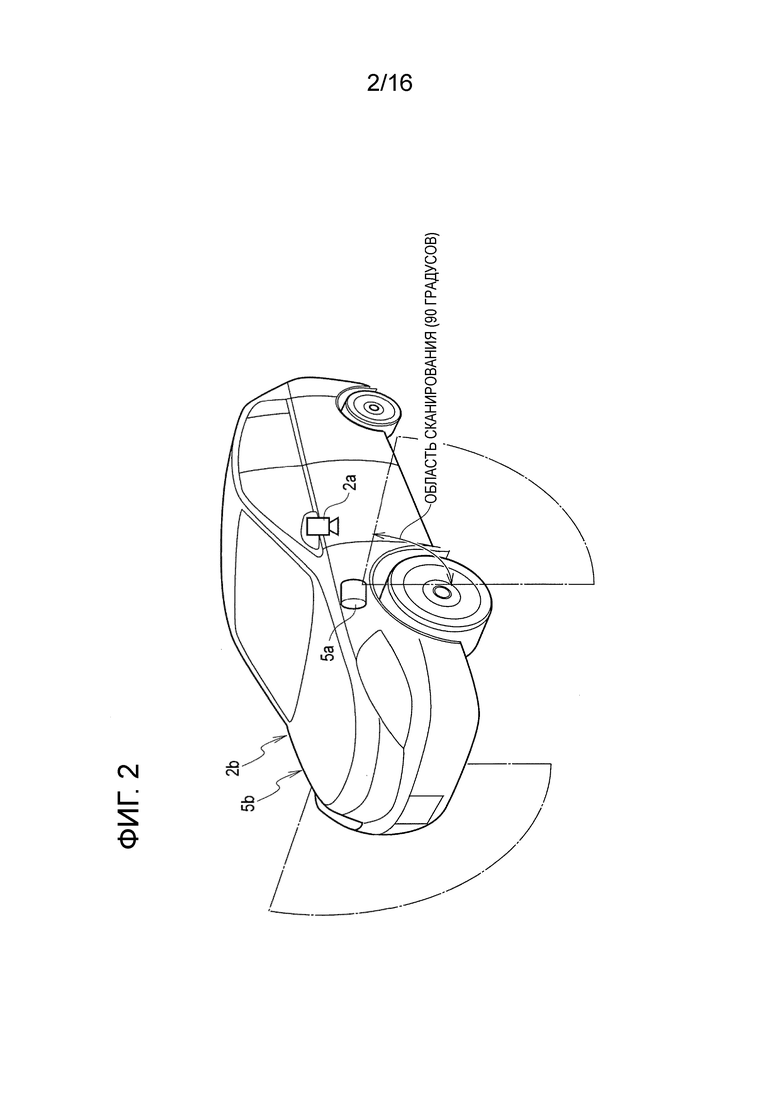
[0012] Камеры 2 (2a, 2b) представляют собой камеры с использованием полупроводниковых элементов формирования изображений, таких как CCD. Камеры 2 устанавливаются, например, в правом и левом боковых зеркалах транспортного средства, как проиллюстрировано на фиг. 2, и нацелены в таких направлениях, что камеры 2 могут захватывать изображения поверхностей дороги ниже транспортного средства. Захваченные изображения отправляются в ECU 1.
[0013] Трехмерная картографическая база 3 данных представляет собой средство хранения для сохранения картографической информации, включающей в себя положения ориентиров для ориентиров, присутствующих на карте, и сохраняет информацию трехмерного положения для окружающей среды, включающую в себя, например, отображение дороги.
Ориентиры, записанные в картографической информаций, представляют собой ориентиры, зарегистрированные в карте, и включают в себя знаки на поверхности дороги, такие как линии секций, стоп-линии, пешеходные переходы и линии дорожной разметки, в дополнение к зданиям, конструкциям и т.п. на поверхностях дороги, таким как бордюры. Фрагменты картографической информации, к примеру, сигнальные линии дорожной разметки, задаются как совокупность краев. Когда край представляет собой длинную прямую линию, край разделяется, например, каждый 1 м, и в силу этого отсутствует чрезвычайно длинный край. Когда край представляет собой прямую линию, край имеет информацию трехмерного положения, указывающую обе конечных точки прямой линии. Когда край представляет собой кривую линию, край имеет информацию трехмерного положения, указывающую обе конечных точки и центральную точку кривой линии. Кроме того, поскольку трехмерная картографическая база 3 данных сохраняет информацию узлов и соединений, включённую в общую навигационную систему, ECU 1 может выполнять обработку навигации на основании инструкций по маршруту в пункт назначения и запись предыдущего маршрута движения.
[0014] Группа 4 датчиков транспортного средства включает в себя приёмное GPS-устройство 41, датчик 42 акселератора, датчик 43 рулевого управления, датчик 44 торможения, датчик 45 скорости транспортного средства, датчик 46 ускорения, датчик 47 скорости вращения колёс и датчик 48 скорости относительно вертикальной оси. Группа 4 датчиков транспортного средства соединяется с ECU 1 и подаёт различные значения определения, определённые посредством датчиков 41-48, в ECU 1. ECU 1 использует выходные значения группы 4 датчиков транспортного средства, чтобы вычислять приблизительное положение транспортного средства и вычислять одометрию, указывающую величину перемещения транспортного средства в единицу времени.
[0015] Лазерные дальномеры 5 (5a, 5b) соединены с обеспечением возможности выполнения сканирования в направлениях слева и справа от кузова транспортного средства, как проиллюстрировано на фиг. 2. Лазерные дальномеры 5 испускают 900×2=1800 лазерных лучей в направлениях, перпендикулярных направлению движения, с интервалами в 0,1 (градуса) в области сканирования в 90 (градусов) от направления непосредственно вниз до горизонтального направления. Лазерные дальномеры 5 могут за счёт этого обнаруживать расстояния εi (м) (i=1-1800) до поверхности дороги и помехи, а также интенсивности εi (i=1-1800, 0≤εi≤255) отражённых волн.
[0016] Устройство 10 оценки собственного положения выступает в качестве контроллера, который выполняет обработку оценки собственного положения и оценивает положение и угол ориентации транспортного средства посредством сопоставления положений ориентиров для ориентиров, присутствующих вокруг транспортного средства, с картографической информацией, сохранённой в трехмерной картографической базе 3 данных. Устройство 10 оценки собственного положения выполняет программу для оценки собственного положения, сохранённой в ROM, и работает в качестве детектора 12 положений ориентиров, детектора 14 величины перемещения, модуля 16 накопления положений ориентиров, модуля 18 получения картографической информации и модуля 20 оценки собственного положения.
[0017] Детектор 12 положений ориентиров обнаруживает положения ориентиров для ориентиров, присутствующих вокруг транспортного средства, из результатов сканирования лазерных дальномеров 5. Кроме того, детектор 12 положений ориентиров может обнаруживать положения ориентиров из изображений, полученных посредством камер 2, или обнаруживать положения ориентиров посредством использования как камер 2, так и лазерных дальномеров 5.
[0018] Детектор 14 величины перемещения обнаруживает одометрию, которая представляет собой величину перемещения транспортного средства, на основании информации из группы 4 датчиков транспортного средства, установленной на транспортном средстве.
[0019] Модуль 16 накопления положений ориентиров накапливает в качестве фрагментов данных положений ориентиров положения ориентиров, полученные посредством перемещения положений ориентиров, обнаруженных посредством детектора 12 положений ориентиров, в циклах управления, выполняемых ранее, на величину перемещения, обнаруженную посредством детектора 14 величины перемещения.
[0020] Модуль 18 получения картографической информации получает картографическую информацию из трехмерной картографической базы 3 данных, и полученная картографическая информация включает в себя положения ориентиров для ориентиров, присутствующих на карте.
[0021] В варианте осуществления, модуль 20 оценки собственного положения оценивает ошибку обнаружения величины перемещения, обнаруженную посредством детектора 14 величины перемещения, на основании изменения предыдущей величины перемещения в записях движения транспортного средства (соответствующих записям перемещения подвижного объекта). Затем модуль 20 оценки собственного положения задаёт определённую область (область A извлечения, которая описана ниже), в пределах которой фрагменты данных положений ориентиров должны извлекаться из модуля 16 накопления положений ориентиров, на основании ошибки обнаружения величины перемещения, оценённой из изменения предыдущей величины перемещения в записях движения транспортного средства, извлекает фрагменты данных положений ориентиров, включённых в определённую область (область A извлечения), заданную на основании записей движения транспортного средства, из фрагментов данных положений ориентиров, накопленных в модуле 16 накопления положений ориентиров, и сопоставляет извлечённые фрагменты данных положений ориентиров с положениями ориентиров, включёнными в картографическую информацию, чтобы оценивать собственное положение транспортного средства.
[0022] Хотя в этом варианте осуществления описан случай, в котором настоящее изобретение применяется в транспортном средстве, настоящее изобретение может применяться также в таких подвижных объектах, как самолёты и суда. Когда настоящее изобретение применяется к самолётам и судам, собственное положение подвижного объекта может оцениваться посредством сопоставления ландшафтов и зданий в качестве окружающей среды вместо информации, связанной с дорожными знаками.
[0023] Этапы при обработке оценки собственного положения
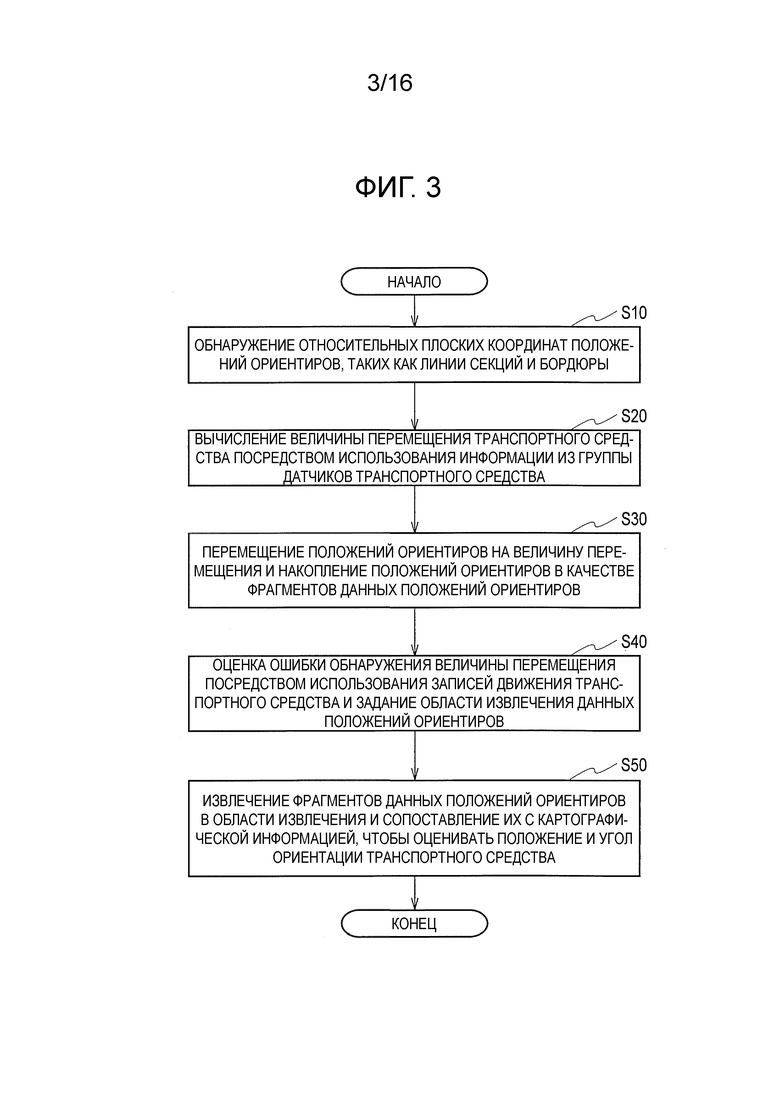
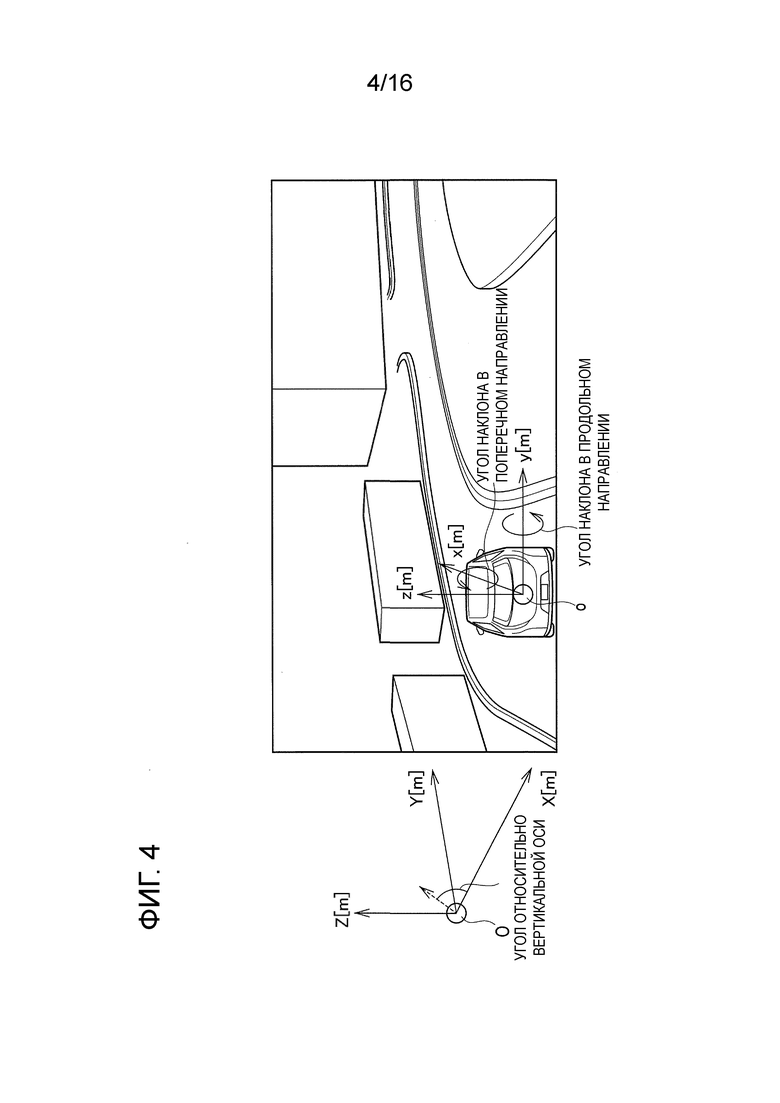
Далее описаны этапы для обработки оценки собственного положения согласно варианту осуществления со ссылкой на блок-схему способа по фиг. 3. Следует отметить, что в варианте осуществления, две системы координат, проиллюстрированные на фиг. 4, используются, когда оценивается собственное положение транспортного средства. В частности, две системы координат представляют собой абсолютную систему координат, центр которой находится в исходной точке картографической информации, и относительную систему пространственных координат, исходная точка которой находится в центре задней оси транспортного средства. В абсолютной системе координат, исходная точка картографической информации задаётся в качестве исходной точки O, направление восток-запад задаётся в качестве оси X, направление север-юг задаётся в качестве оси Y, и направление вертикально вверх задаётся в качестве оси Z. В абсолютной системе координат, азимутальный угол θ (угол относительно вертикальной оси) (рад), представляющий собой курс транспортного средства, выражается посредством угла против часовой стрелки, при этом 0 представляет собой направление на восток (направление по оси X). Кроме того, в относительной системе пространственных координат, центр задней оси транспортного средства задаётся в качестве исходной точки 0, направление спереди назад транспортного средства задаётся в качестве оси X, направление ширины транспортного средства задаётся в качестве оси Y, и направление вертикально вверх задаётся в качестве оси Z.
[0024] Следует отметить, что в варианте осуществления, положение и угол ориентации оцениваются всего с тремя степенями свободы, включающими в себя: положение (координату X (м)) в направлении восток-запад (в направлении по оси X) и положение (координату Y (м)) в направлении север-юг (в направлении по оси Y), которые представляют собой оценённое собственное положение транспортного средства; и азимутальный угол θ (угол относительно вертикальной оси (рад)) транспортного средства, который является информацией угла ориентации транспортного средства. Тем не менее, положения и углы ориентации в пространстве с шестью степенями свободы могут получаться вместо положения и угла ориентации с тремя степенями свободы. Кроме того, обработка оценки собственного положения, описанная ниже, выполняется последовательно с интервалами, например, приблизительно в 100 мс.
[0025] Как проиллюстрировано на фиг. 3, во-первых, на этапе S10, детектор 12 положений ориентиров обнаруживает положения ориентиров для ориентиров, присутствующих вокруг транспортного средства. В частности, детектор 12 положений ориентиров получает результаты сканирования лазерных дальномеров 5 и извлекает положения ориентиров знаков на поверхности дороги, таких как линии секций и стоп-линии, и конструкций, таких как бордюры и здания. Положения ориентиров, извлекаемые в контексте данного документа, имеют относительные плоские координаты (xj(t), yj(t)) положения (м) относительно транспортного средства в относительной системе пространственных координат. Следует отметить, что j в xj, yj равны числу знаков на поверхности дороги и бордюров, которые извлекаются. Кроме того, t выражает текущий момент времени (цикл).
[0026] Способ получения относительных плоских координат положения знака на поверхности дороги заключается в следующем. Когда интенсивность δi отражённой волны испускаемого лазерного луча достигает или превышает пороговое значение δth, детектор 12 положений ориентиров определяет то, что лазерный луч падает на знак на поверхности дороги, и получает относительные плоские координаты положения посредством использования расстояния εi от рассматриваемого транспортного средства до точки, в которой падает лазерный луч, и угла лазерного луча. Относительные плоские координаты положения могут получаться этим способом, поскольку участок знака на поверхности дороги поверхности дороги содержит большую величину отражающего материала и отражает лазерный луч при более высокой интенсивности, чем участок асфальта поверхности дороги. Кроме того, пороговое значение δth может получаться заранее посредством экспериментов и т.п. и сохраняться в ECU 1. В варианте осуществления, пороговое значение δth задаётся равным 120.
[0027] Относительно способа получения положений ориентиров таких конструкций, как бордюры и здания, относительные плоские координаты (xj(t), yj(t)) положения каждой точки, в которой падает лазерный луч, вычисляются и получаются посредством использования расстояния εi до точки, в которой падает лазерный луч, и угла лазерного луча. В частности, например, в ситуации, проиллюстрированной в части (a) по фиг. 5, когда лазерный дальномер 5 испускает лазерные лучи, лазерные лучи падают на поверхность дороги, включающую в себя бордюр 51, как проиллюстрировано посредством линии 53. Когда точечная группа лазерных лучей, испускаемых так, как описано выше, обнаруживается, как проиллюстрировано в части (b) по фиг. 5, участок 55 большого изменения обнаруживается. Участок, в котором наклон точечной группы значительно изменяется, извлекается из обнаруженной точечной группы посредством использования способа обнаружения сегментов, такого как преобразование Хафа, и вычисляются относительные плоские координаты (xj(t), yj(t)) положения этого участка. Также в случае, если конструкция на поверхности дороги представляет собой здание, относительные плоские координаты (xj(t), yj(t)) положения могут получаться аналогично посредством извлечения участка, в котором наклон точечной группы значительно изменяется.
[0028] Кроме того, на этапе S10, детектор 12 положений ориентиров может получать изображения камер 2 и извлекать относительные плоские координаты (xj(t), yj(t)) положения дорожных знаков, таких как линии секций, посредством использования изображений камер 2. Ниже описан способ извлечения относительных плоских координат положения дорожных знаков посредством использования изображений камер 2 со ссылкой на фиг. 6. Часть (a) по фиг. 6 иллюстрирует изображение 60a камеры 2a, захватывающей изображение нижнего левого участка транспортного средства, и изображение 60b камеры 2b, захватывающей изображение нижнего правого участка транспортного средства. В изображениях 60a, 60b, детектор 12 положений ориентиров обнаруживает сигнальные линии дорожной разметки в областях 61a, 61b. Например, детектор 12 положений ориентиров выполняет преобразование в двоичную форму для областей 61a, 61b, чтобы извлекать область 63 с высоким значением яркости, и обнаруживает участок 65 с высоким значением яркости, как проиллюстрировано в части (b) по фиг. 6. Затем, как проиллюстрировано в части (c) по фиг. 6, детектор 12 положений ориентиров вычисляет центр 67 тяжести участка 65 высоких значений яркости и получает относительные плоские координаты (xj(t), yj(t)) положения центра 67 тяжести посредством использования внутренних параметров (модели камеры) и внешних параметров (положения крепления камеры 2 к транспортному средству) камеры 2.
[0029] Следует отметить, что сразу после того, как запускается двигатель транспортного средства, либо в случае, если транспортное средство представляет собой электромобиль, сразу после того, как включается электропитание для приведения в движение, результаты сканирования лазерных дальномеров 5 не накапливаются. Соответственно, в варианте осуществления, когда двигатель транспортного средства отключается, либо в случае, если транспортное средство представляет собой электромобиль, когда электропитание для приведения в движение выключается, результаты сканирования в нижеописанной области A извлечения (м) из текущего положения, извлекаются и записываются в запоминающее устройство ECU 1 или на носитель записи. После этого, когда двигатель транспортного средства запускается, либо в случае, если транспортное средство представляет собой электромобиль, когда электропитание для приведения в движение включается, записанные результаты сканирования распознаются.
[0030] Кроме того, операция подвергания относительных плоских координат (xj(t), yj(t)) положения линий секций, бордюров, зданий и т.п., извлечённых на этапе S10, обработке, которая описана ниже, чтобы записывать их в качестве относительных плоских координат положения в текущий момент t времени, продолжается до тех пор, пока двигатель транспортного средства не будет выключен. Когда транспортное средство представляет собой электромобиль, запись относительных плоских координат (xj(t), yj(t)) положения продолжается до тех пор, пока электропитание для приведения в движение не будет выключено.
[0031] Затем, на этапе S20, детектор 14 величины перемещения обнаруживает одометрию, которая представляет собой величину перемещения транспортного средства в период от момента времени за один цикл до текущего момента t времени, на основании информации датчиков, полученной из группы 4 датчиков транспортного средства. Одометрия представляет собой величину перемещения, которую транспортное средство проезжает в единицу времени. Например, в варианте осуществления, относительно величины перемещения угла относительно вертикальной оси, скорость γ относительно вертикальной оси (рад/с), полученная из датчика 48 скорости относительно вертикальной оси, умножается на 100 мс, что представляет собой цикл вычисления ECU 1, чтобы получать величину Δθ(t) изменения (рад) угла относительно вертикальной оси. Кроме того, относительно величины перемещения в направлении перемещения в пространстве, скорость V транспортного средства[m/s], полученная из датчика 45 скорости транспортного средства, умножается на 100 мс, что представляет собой цикл вычисления ECU 1, чтобы получать величину ΔL(t) перемещения (м) в направлении перемещения в пространстве. Кроме того, вычисление одометрии может выполняться таким образом, что параметры шин колёс транспортного средства измеряются, и угол бокового скольжения кузова транспортного средства и величина бокового скольжения кузова транспортного средства оцениваются и вычисляются посредством использования модели велосипеда и т.п.
[0032] На этапе S30, модуль 16 накопления положений ориентиров перемещает положения ориентиров, обнаруженные посредством детектора 12 положений ориентиров, на величину перемещения, обнаруженную посредством детектора 14 величины перемещения, и накапливает положения ориентиров в качестве фрагментов данных положений ориентиров. В частности, относительные плоские координаты (xj(t), yj(t)) положения ориентиров, таких как линии секций и бордюры, полученные на этапе S10 предыдущих циклов, перемещаются на величину одометрии, полученной на этапе S20. Другими словами, положения ориентиров, таких как линии секций и бордюры, полученные ранее посредством использования одного или обоих из лазерных дальномеров 5 и камер 2, преобразуются в положения в относительной системе пространственных координат, исходная точка которой представляет собой центр задней оси транспортного средства в данный момент, посредством использования информации одометрии.
[0033] Положения ориентиров в силу этого могут указываться из результатов сканирования лазерных дальномеров 5, как проиллюстрировано, например, в части (b) по фиг. 7. Часть (b) по фиг. 7, является видом, иллюстрирующим фрагменты данных положений ориентиров, накопленных, когда транспортное средство движется по маршруту стрелки 71 на проезжей дороге, вид сверху которой проиллюстрирован в части (a) по фиг. 7. В частности, часть (b) по фиг. 7, является примером, иллюстрирующим результат перемещения фрагментов информации положения ориентиров, обнаруженных посредством лазерных дальномеров 5 на этапе S10, на величину перемещения, обнаруженную на этапе S20, и накопления фрагментов информации положения. В части (b) по фиг. 7, отображаются положения точек на поверхности дороги с высокой интенсивностью отражения, таких как, например, линии секций, стоп-линии и пешеходные переходы, а также положения бордюров, в которых результаты лазерного обнаружения значительно изменяются.
[0034] На этапе S40, модуль 20 оценки собственного положения оценивает ошибку обнаружения величины перемещения транспортного средства на основании изменения предыдущей величины перемещения в записях движения транспортного средства и задаёт определённую область (область A извлечения), в которой фрагменты данных положений ориентиров должны извлекаться из модуля 16 накопления положений ориентиров, на основании оценённой ошибки обнаружения величины перемещения. В частности, в варианте осуществления, ошибка обнаружения величины перемещения оценивается посредством использования изменения предыдущей величины перемещения в записях движения транспортного средства. Конкретные примеры изменения предыдущей величины перемещения в записях движения транспортного средства, используемых для того, чтобы оценивать ошибку обнаружения величины перемещения, включают в себя изменение предыдущих величин перемещения в текущем положении транспортного средства и положении транспортного средства за определённое время до текущего момента времени или положении после текущего положения на предварительно определённое расстояние.
[0035] Как проиллюстрировано на фиг. 8, модуль 20 оценки собственного положения сравнивает собственное положение 80 (X(t), Y(t), θ (t)) транспортного средства, вычисленное на этапе S50 предыдущего цикла, с собственным положением 82 (X (t-T), Y (t-T), θ (t-T)) транспортного средства за время T (с) до текущего момента времени, и получает величину перемещения, посредством использования записей движения. Следует отметить, что собственное положение в данном документе означает положение в направлении восток-запад (координату X (м)), положение в направлении север-юг (координату Y (м)) и азимутальный угол θ против часовой стрелки (угол относительно вертикальной оси (рад)) в абсолютной системе координат, при этом азимутальный угол θ является информацией угла ориентации, в которой направление на восток составляет 0.
[0036] На фиг 8, собственное положение 82 транспортного средства за время T (с) до текущего момента времени в записях движения имеет изменение предыдущей величины перемещения, которая сдвигается посредством абсолютного значения Δy (м) в направлении ширины транспортного средства при просмотре из транспортного средства в текущей собственного положения 80. Когда абсолютное значение Δy (м) величины сдвига, которое представляет собой изменение предыдущей величины перемещения в направлении ширины транспортного средства, составляет пороговое значение yth (м) или более, модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является большой. Между тем, когда абсолютное значение Δy (м) величины сдвига, которое представляет собой изменение предыдущей величины перемещения в направлении ширины транспортного средства, меньше порогового значения yth (м), модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является небольшой.
[0037] Перемещением транспортного средства в направлении ширины транспортного средства, как проиллюстрировано на фиг. 8, может считаться то, что транспортное средство выполняет поворачивание, смены полосы движения, правый или левый повороты или движется по искривленной дороге, что заключает в себе большое изменение величины перемещения, и в силу этого имеет тенденцию вызывать накопление ошибок одометрии. Соответственно, модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является большой.
[0038] Когда модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, посредством использования изменения предыдущей величины перемещения в записях движения, модуль 20 оценки собственного положения увеличивает область A извлечения (м), в котором фрагменты данных положений ориентиров должны извлекаться на этапе S50, который описан ниже, и задаёт его равным, например, 200 м. Между тем, когда модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, посредством использования изменения предыдущей величины перемещения в записях движения, модуль 20 оценки собственного положения уменьшает область A извлечения (м) и задаёт её равной, например, 100 м. Кроме того, как проиллюстрировано на фиг. 9, модуль 20 оценки собственного положения может изменять область A извлечения таким образом, что область A извлечения непрерывно уменьшается по мере того, как величина Δy сдвига, представляющая собой изменение предыдущей величины перемещения, возрастает. Другими словами, область A извлечения задаётся таким образом, что она уменьшается по мере того, как ошибка обнаружения величины перемещения, оценённая посредством использования изменения предыдущей величины перемещения в записях движения, увеличивается. Когда ошибка обнаружения величины перемещения оценивается как большая посредством использования изменения предыдущей величины перемещения в записях движения, как описано выше, накопление ошибок в одометрии уменьшается посредством уменьшения области A извлечения.
[0039] Следует отметить, что пороговое значение yth может задаваться равным, например, 50 м. Кроме того, величина уменьшения области A извлечения задаётся равной соответствующему значению посредством изучения совпадающего состояния на этапе S50 заранее посредством экспериментов и моделирований и может задаваться равной значениям, отличным от значения, которое уменьшает область A извлечения с 200 м до 100 м.
[0040] Кроме того, модуль 20 оценки собственного положения может оценивать изменение предыдущей величины перемещения посредством использования, в качестве записей движения, не только величины перемещения в направлении ширины транспортного средства, но также и числа перекрёстков, которые проходит транспортное средство, и оценивает размер ошибки обнаружения величины перемещения. В этом случае, область A извлечения сначала задаётся равной 200 м, и число раз, которое транспортное средство проходит перекрёстки в области A извлечения, подсчитывается в качестве записей движения, посредством использования информации соединений и узлов, зарегистрированной в трехмерной картографической базе 3 данных.
[0041] Когда число раз, которое транспортное средство проходит перекрёстки, в записях движения меньше трех, изменение предыдущей величины перемещения является небольшим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и выходит за пределы области A извлечения как есть, что составляет 200 м. Между тем, когда число раз, которое транспортное средство проходит перекрёстки в записях движения, равно трём или более, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной 100 м. Помимо этого, модуль 20 оценки собственного положения может выполнять операции следующим образом. Модуль 20 оценки собственного положения выполняет поиск максимального градиента на карте в области A извлечения. Например, когда секция с максимальным градиентом 4% или более включена в качестве записей движения, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной 100 м.
[0042] Как описано выше, модуль 20 оценки собственного положения может оценивать изменение предыдущей величины перемещения посредством обращения не только к текущему положению транспортного средства и поло транспортного средства в предварительно определённый момент времени до текущего момента времени, но также и к картографической информации на маршруте движения транспортного средства в качестве записей движения, и оценивать ошибку обнаружения величины перемещения. Модуль 20 оценки собственного положения за счёт этого может уменьшать область A извлечения и уменьшать накопление ошибок одометрии, когда маршрут движения включает в себя точки, в которых изменение величины перемещения является большим, и ошибки одометрии имеют тенденцию накапливаться, к примеру, секции с высоким градиентом и перекрёстки, заключающие в себе правые и левые повороты, остановки и начала движения.
[0043] На этапе S50, модуль 20 оценки собственного положения извлекает фрагменты данных положений ориентиров, включённых в набор области A извлечения на этапе S40, из фрагментов данных положений ориентиров, накопленных в модуле 16 накопления положений ориентиров. Затем модуль 20 оценки собственного положения сопоставляет извлечённые фрагменты данных положений ориентиров с положениями ориентиров, включёнными в картографическую информацию, и оценивает собственное положение транспортного средства.
[0044] В частности, модуль 20 оценки собственного положения извлекает фрагменты данных положений ориентиров в наборе области A извлечения на этапе S40, из фрагментов данных положений ориентиров на линиях секций, бордюрах и т.п., накопленных на этапе S30. В этом случае, модуль 20 оценки собственного положения суммирует величины ΔL перемещения, вычисленные на этапе S20, при возвращении из текущего момента t времени, и извлекает фрагменты данных положений ориентиров до тех пор, пока суммированное значение не превысит область A извлечения.
[0045] Затем модуль 20 оценки собственного положения сопоставляет извлечённые фрагменты данных положений ориентиров с положениями ориентиров в картографической информации, сохранённой в трехмерной картографической базе 3 данных, и оценивает собственное положение транспортного средства в абсолютной системе координат. В частности, модуль 20 оценки собственного положения оценивает положение и угол ориентации всего с тремя степенями свободы, которые включают в себя положение (координату X) транспортного средства в направлении восток-запад, положение (координату Y) транспортного средства в направлении север-юг и азимутальный угол θ (угол θ относительно вертикальной оси) транспортного средства. Когда собственное положение оценивается так, как описано выше, обработка оценки собственного положения согласно варианту осуществления завершается.
[0046] Следует отметить, что ICP (итеративный алгоритм ближайших точек) используется в сопоставлении на этапе S50. В этом случае, например, линия секций из числа положений ориентиров, включённых в картографическую информацию трехмерной картографической базы 3 данных, согласовывается посредством использования конечных точек с обоих концов линии секций в качестве точек оценки. Кроме того, чем ближе фрагмент данных положений ориентиров к транспортному средству (камере 2), тем меньше он затрагивается посредством ошибки одометрии. Соответственно, число точек оценки увеличивается около транспортного средства посредством выполнения линейной интерполяции, тогда как число точек оценки уменьшается в области на большом расстоянии от транспортного средства.
[0047] Модифицированный пример 1
В качестве модифицированного примера 1 варианта осуществления, при оценке ошибки обнаружения величины перемещения посредством использования записей движения транспортного средства на этапе S40, когда число правых и левых поворотов транспортного средства является большим в конкретном примере записей движения, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и уменьшает область A извлечения. Это обусловлено тем, что изменение предыдущей величины перемещения увеличивается по мере того, как возрастает число поворотов. В этом случае, область A извлечения сначала задаётся равной 200 м, и число раз, когда транспортное средство выполняет левые и правые повороты на перекрёстках в области A извлечения, подсчитывается посредством использования информации соединений и узлов, зарегистрированной в трехмерной картографической базе 3 данных.
[0048] Как проиллюстрировано на фиг. 10, в информации соединений и узлов, записываются разделенные соединения (стрелки) и узлы (круги) и информация атрибутов, из которой может определяться движение по прямой, правый поворот, левый поворот, встраивание на полосу или покидание полосы, назначается каждому соединению. Соответственно, информация правых и левых поворотов транспортного средства может получаться посредством обнаружения соединений, которые проходит транспортное средство, и обращения к информации соединений и узлов.
[0049] Когда число правых и левых поворотов на перекрёстках в записях движения меньше двух, изменение предыдущей величины перемещения является небольшим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и задаёт область A извлечения равной большому значению, например, выходящей за пределы области A извлечения на уровне 200 м. Между тем, когда число правых и левых поворотов на перекрёстках в записях движения равно двум или более, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной небольшому значению, например, 100 м. В этом случае, область A извлечения может непрерывно изменяться в зависимости от числа правых и левых поворотов.
[0050] Как описано выше, когда транспортное средство выполняет правые и левые повороты, которые имеют тенденцию вызывать накопление ошибок одометрии, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0051] Модифицированный пример 2
В качестве модифицированного примера 2, когда число смен полосы движения транспортного средства является большим в конкретном примере записей движения на этапе S40, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и уменьшает область A извлечения. Это обусловлено тем, что изменение предыдущей величины перемещения увеличивается по мере того, как возрастает число смен полосы движения. В этом случае, область A извлечения сначала задаётся равной 200 м, и число раз, когда транспортное средство выполняет смены полосы движения в области A извлечения, подсчитывается посредством использования информации соединений и узлов, зарегистрированной в трехмерной картографической базе 3 данных. Как проиллюстрировано на фиг. 10, в информации соединений и узлов, информация линии связи задаётся отдельно для каждой полосы движения в дороге с несколькими полосами движения. Соответственно, число смен полосы движения может подсчитываться посредством обращения к информации соединений и узлов.
[0052] Когда число смен полосы движения в записях движения равно нулю, изменение предыдущей величины перемещения является небольшим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и задаёт область A извлечения равной большому значению, например, выходящему за пределы области A извлечения на уровне 200 м. Между тем, когда число смен полосы движения в записях движения равно одному или более, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной небольшому значению, например, 100 м.
[0053] Как описано выше, когда транспортное средство выполняет смены полосы движения, которые имеют тенденцию вызывать накопление ошибок одометрии, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0054] Модифицированный пример 3
В качестве модифицированного примера 3, когда число покиданий полосы и встраиваний на полосу транспортного средства является большим в конкретном примере записей движения на этапе S40, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и уменьшает область A извлечения. Это обусловлено тем, что изменение предыдущей величины перемещения увеличивается по мере того, как возрастает число покиданий полосы и встраиваний на полосу. В этом случае, область A извлечения сначала задаётся равной 200 м, и число раз, когда транспортное средство покидает полосу движения или встраивается на полосу движения в области A извлечения, подсчитывается посредством использования информации соединений и узлов, зарегистрированной в трехмерной картографической базе 3 данных. Определение покидания полосы или встраивания на полосу может осуществляться посредством обращения к информации атрибутов, назначаемой каждому соединению в информации соединений и узлов, как проиллюстрировано на фиг. 10. На фиг. 10, хотя соединение покидания полосы или встраивания на полосу не проиллюстрировано, поскольку информация атрибутов, из которой может определяться движение по прямой, правый поворот, левый поворот, встраивание на полосу или покидание полосы, назначается каждому соединению, то, транспортное средство покидает полосу движения или встраивается на полосу движения, может определяться посредством обращения к этой информации атрибутов.
[0055] Когда число покиданий полосы и встраиваний на полосу в записях движения равно нулю, изменение предыдущей величины перемещения является небольшим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и задаёт область A извлечения равной большому значению, например, выходящему за пределы области A извлечения на уровне 200 м. Между тем, когда число покиданий полосы и встраиваний на полосу в записях движения равно одному или более, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной небольшому значению, например, 180 м.
[0056] Как описано выше, когда транспортное средство покидает полосу движения или встраивается на полосу движения, что имеет тенденцию вызывать накопление ошибок одометрии, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0057] Модифицированный пример 4
В качестве модифицированного примера 4, когда радиус кривизны кривой, через которую движется транспортное средство, является небольшим в конкретном примере записей движения на этапе S40, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и уменьшает область A извлечения. Это обусловлено тем, что изменение предыдущей величины перемещения увеличивается по мере того, как возрастает радиус кривизны. В этом случае, область A извлечения сначала задаётся равной 200 м, и радиус кривизны кривой, через которую движется транспортное средство в области A извлечения, определяется посредством использования информации соединений и узлов, зарегистрированной в трехмерной картографической базе 3 данных. Поскольку радиус кривизны сохраняется в каждом соединении в информации соединений и узлов, радиус кривизны может обнаруживаться посредством указания соединения, посредством которого движется транспортное средство.
[0058] Затем когда радиус кривизны кривой, через которую движется транспортное средство, в записях движения превышает 50 м, изменение предыдущей величины перемещения является небольшим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и задаёт область A извлечения равной большому значению, например, выходящему за пределы области A извлечения на уровне 200 м. Между тем, когда радиус кривизны кривой, через которую движется транспортное средство, в записях движения, составляет 50 м или менее, изменение предыдущей величины перемещения является большим, и за счёт этого модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной небольшому значению, например, 100 м. В этом случае, область A извлечения может непрерывно изменяться в зависимости от радиуса кривизны.
[0059] Как описано выше, когда транспортное средство движется через кривую с небольшим радиусом кривизны, что имеет тенденцию вызывать накопление ошибок одометрии, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0060] Модифицированный пример 5
В качестве модифицированного примера 5, модуль 20 оценки собственного положения может оценивать изменение предыдущей величины перемещения, оценивать ошибку обнаружения величины перемещения и задавать область A извлечения посредством использования нескольких форм записей движения в вышеуказанном варианте осуществления и модифицированных примерах 1-4. В этом случае, как проиллюстрировано на фиг. 11, величина ΔA уменьшения области A извлечения задаётся для каждой величины Δy сдвига, представляющей собой изменение предыдущей величины перемещения в записях движения и факторов ошибки, таких как число правых и левых поворотов, которые предположительно вызывают большое изменение предыдущей величины перемещения. Когда ошибка обнаружения для каждого фактора ошибки оценивается как большая, величина ΔA уменьшения, соответствующая этому фактору ошибки, вычитается из области A извлечения. Например, на фиг. 11, величина ΔA уменьшения задаётся равной 20 м для каждого из случая, в котором величина Δy сдвига в записях движения составляет 50 м или более, случая, в котором число прохождений перекрёстки равно трем или более, и случая, в котором число правых и левых поворотов составляет два или более в записях движения, в то время как уменьшение ΔA задаётся равным 10 м для случая, в котором число покиданий полосы, встраиваний на полосу или смен полосы движения составляет одно или более. Кроме того, величина ΔA уменьшения задаётся равной 50 м для случая, в котором радиус кривизны кривой, через которую движется транспортное средство, составляет 50 м или менее в записях движения. Затем когда имеются несколько факторов ошибки, которые согласно оценке вызывают большую ошибку обнаружения величины перемещения, область A извлечения задаётся посредством вычитания суммы величин ΔA уменьшения, соответствующих этим факторам ошибки, из 200 м, заданных заранее. Например, когда число правых и левых поворотов равно двум, и число смен полосы движения равно одному в записях движения, 30 м, составляющие сумму величин уменьшения в 20 м и 10 м для соответствующих факторов ошибки, вычитаются из 200 м, и область A извлечения задаётся равной 170 м. В этом случае, когда сумма величин ΔA уменьшения является слишком большой, область A извлечения становится слишком малой, и затруднительно выполнять сопоставление, выполняемое на этапе S50. Соответственно, минимальное значение области A извлечения задаётся равным, например, 100 м. Кроме того, каждая величина ΔA уменьшения задаётся равной соответствующему значению посредством изучения совпадающего состояния на этапе S50 заранее посредством экспериментов и моделирований.
[0061] Преимущества первого варианта осуществления
Далее описаны преимущества устройства оценки собственного положения в варианте осуществления. Во-первых, приводится описание традиционной технологии оценки собственного положения. В традиционной технологии, величины перемещения и результаты распознавания накапливаются и связываются для того, чтобы оценивать собственное положение. Например, часть (a) по фиг. 12 иллюстрирует изображение вида «с высоты птичьего полёта», полученное посредством преобразования изображений камер типа «рыбий глаз», выполненных с возможностью захвата изображений правой и левой сторон транспортного средства в направлении вниз. Хотя текущее изображение 121 вида «с высоты птичьего полёта» является небольшим, как проиллюстрировано в части (a) по фиг. 12, предыдущее изображение вида «с высоты птичьего полёта» фиксированной секции может получаться посредством добавления участка 123 в текущее изображение 121 вида «с высоты птичьего полёта», как проиллюстрировано в части (b) по фиг. 12, причём участок 123 получается посредством накопления и связывания записей предыдущих величин перемещения и результатов распознавания (изображений вида «с высоты птичьего полёта»). Соответственно, даже когда присутствует помеха, такая как припаркованное транспортное средство, собственное положение может оцениваться посредством использования предыдущих результатов распознавания.
[0062] В этом случае, в традиционной технологии оценки собственного положения, записи результатов распознавания в пределах фиксированного расстояния всегда используются для того, чтобы исключать эффекты скорости перемещения подвижного объекта и стабильно выполнять оценку собственного положения. Это обусловлено тем, что когда используются записи результатов распознавания в пределах фиксированного времени, результаты распознавания, полученные, когда подвижный объект движется на чрезвычайно низкой скорости или является стационарным, являются идентичными текущим результатам распознавания. Кроме того, когда скорость перемещения является высокой, область, полученная посредством связывания записей результатов распознавания, является большой, и большая вычислительная нагрузка требуется для того, чтобы выполнять регулирование сопоставления результатов распознавания с картографической информацией.
[0063] Тем не менее, поскольку традиционная технология оценки собственного положения, описанная выше, использует записи результатов распознавания в пределах фиксированного расстояния, эта технология имеет такую проблему, что в ситуации, в которой ошибка обнаружения величины перемещения является большой, отклонение между результатами распознавания и картографической информацией является большим, и оценка собственного положения является затруднительной.
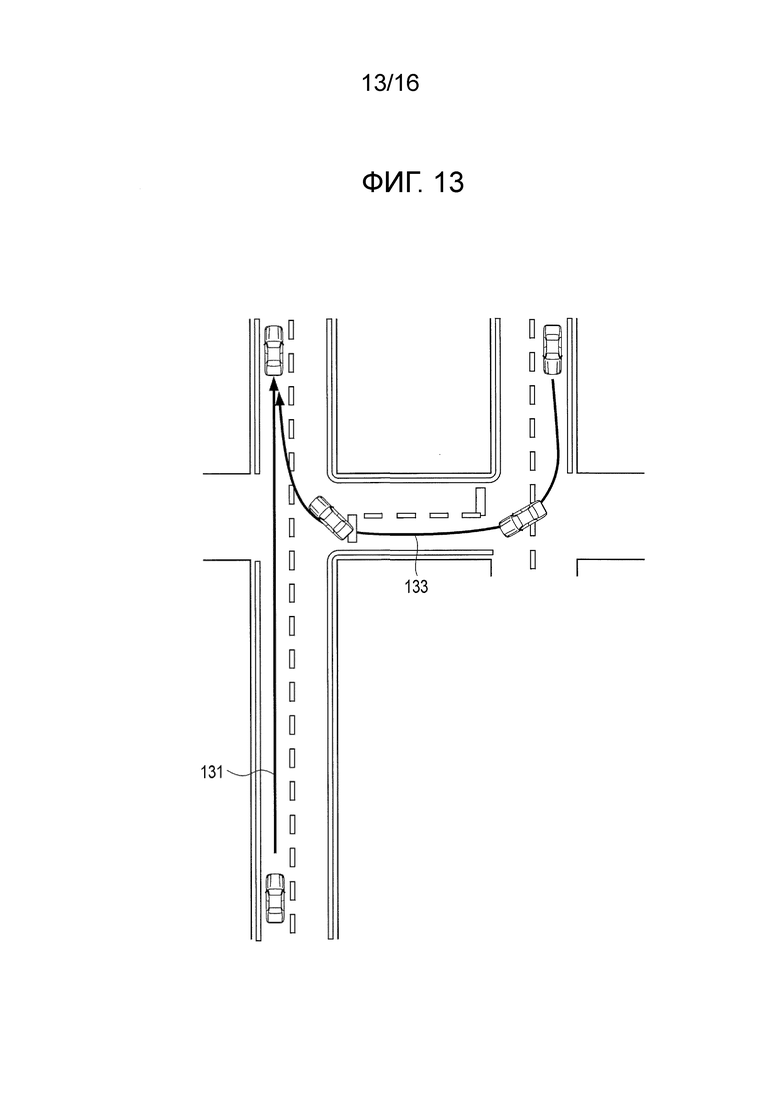
[0064] Например, как проиллюстрировано на фиг. 13, результат связывания результатов распознавания для идентичного расстояния сравнивается между случаем 131, в котором записи движения транспортного средства указывают то, что транспортное средство движется по прямой с постоянной скоростью, и случаем 133, в котором записи движения транспортного средства указывают то, что транспортное средство многократно выполняет правый или левый повороты при ускорении и замедлении.
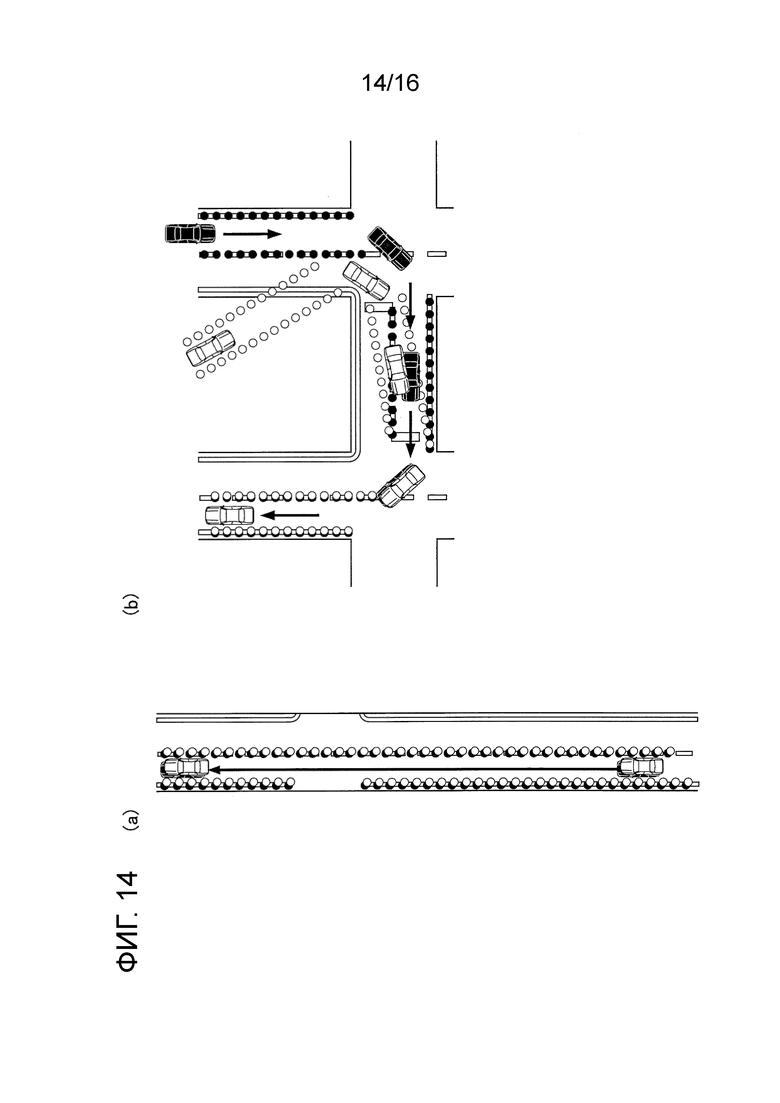
[0065] Фиг. 14 является видом, иллюстрирующим результаты сравнения. Черные круги на фиг. 14 указывают положения краев сигнальных линий дорожной разметки, обнаруженные в каждый момент времени посредством лазерных дальномеров, установленных на транспортном средстве, а белые круги указывают результат связывания предыдущих результатов распознавания в традиционной технологии оценки собственного положения.
[0066] Как проиллюстрировано в части (a) по фиг. 14, когда записи движения транспортного средства указывают то, что транспортное средство движется по прямой с постоянной скоростью, изменение предыдущей величины перемещения транспортного средства является небольшим, и в силу этого ошибка обнаружения величины перемещения является небольшой. Соответственно, отклонение между обнаруженными краями сигнальных линий дорожной разметки (черными кругами) и связанными результатами распознавания (белыми кругами) является небольшим.
[0067] С другой стороны, как проиллюстрировано в части (b) по фиг. 14, когда записи движения транспортного средства указывают то, что транспортное средство многократно выполняет правый или левый повороты при ускорении и замедлении, изменение предыдущей величины перемещения транспортного средства является большим, и как результат, ошибка обнаружения величины перемещения является большой. Соответственно, отклонение между обнаруженными краями сигнальных линий дорожной разметки (черными кругами) и связанными результатами распознавания (белыми кругами) возрастает от настоящего момента к предыдущему. В таком случае, есть возможность уменьшать ошибку обнаружения величины перемещения посредством обеспечения большей точности модели транспортного средства, используемой в обнаружении величины перемещения. Тем не менее, в случае, например, транспортного средства, затруднительно точно моделировать изменение коэффициента трения поверхности дороги и изменение массы кузова транспортного средства вследствие изменений пассажиров и топлива на борту, и в силу этого затруднительно разрешать вышеуказанную проблему.
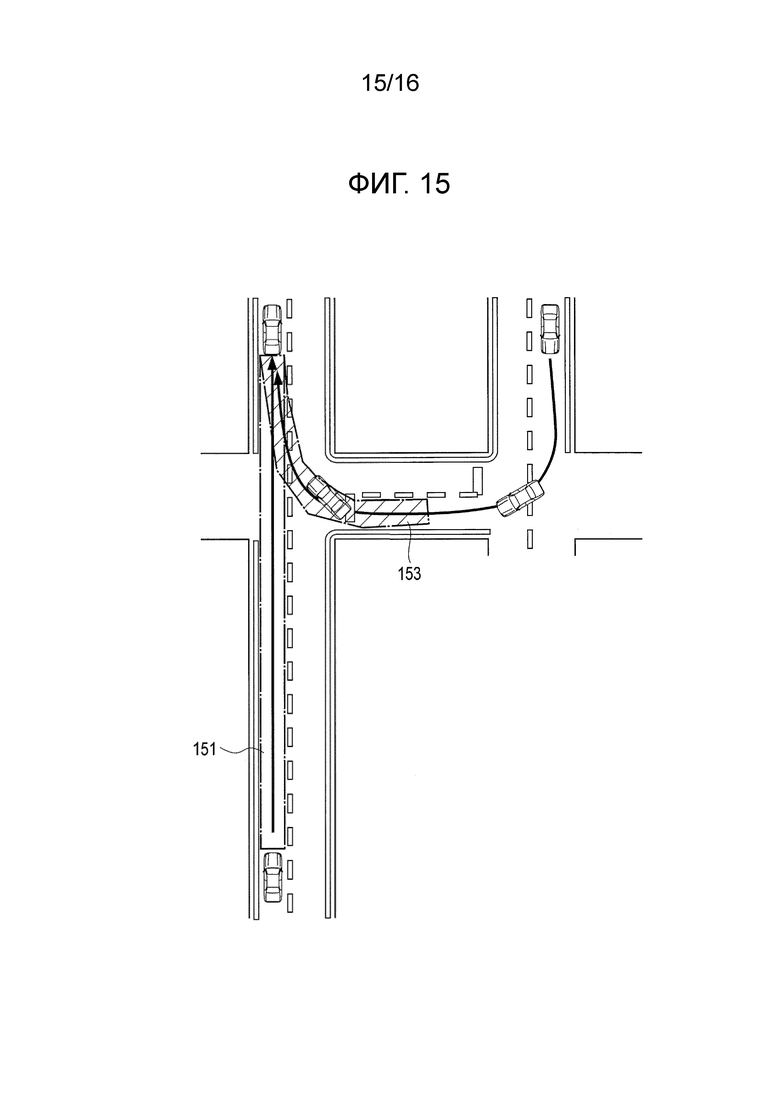
[0068] Соответственно, устройство оценки собственного положения согласно варианту осуществления оценивает ошибку обнаружения величины перемещения посредством использования записей движения транспортного средства и уменьшает область извлечения данных накопленных фрагментов данных положений ориентиров по мере того, как возрастает оценённая ошибка обнаружения. Например, как проиллюстрировано на фиг. 15, большая область 151 извлечения задаётся, когда транспортное средство движется по прямой, что вызывает небольшую ошибку обнаружения величины перемещения, и небольшая область 153 извлечения задаётся, когда транспортное средство повторяет правые и левые повороты, что вызывает большую ошибку обнаружения.
[0069] Как описано выше, устройство оценки собственного положения согласно варианту осуществления задаёт определённую область (область A извлечения) для фрагментов данных положений ориентиров на основании записей движения и оценивает собственное положение транспортного средства посредством сопоставления извлечённых фрагментов данных положений ориентиров в определённой области (области A извлечения) с положениями ориентиров, включёнными в картографическую информацию. Когда записи движения указывают то, что транспортное средство многократно выполняет правые и левые повороты, изменение предыдущей величины перемещения является большим. Таким образом, устройство оценки собственного положения определяет то, что ошибка обнаружения является большой, и уменьшает определённую область (область A извлечения) таким образом, что фрагменты данных положений ориентиров могут согласовываться с положениями ориентиров в картографической информации в области, в которой отклонение от картографической информации является достаточно небольшим. Кроме того, когда записи движения указывают то, что транспортное средство движется по прямой на постоянной скорости, изменение предыдущей величины перемещения является небольшим. Таким образом, устройство оценки собственного положения определяет то, что ошибка обнаружения является небольшой, и увеличивает определённую область (область A извлечения) таким образом, что большее число фрагментов данных положений ориентиров может согласовываться с положениями ориентиров в картографической информации. Соответственно, собственное положение может стабильно оцениваться с высокой точностью на основании записей движения не только в ситуации, в которой ошибка обнаружения величины перемещения является небольшой, но также и в ситуации, в которой ошибка обнаружения является большой.
[0070] Кроме того, устройство оценки собственного положения согласно варианту осуществления уменьшает определённую область по мере того, как возрастает число правых и левых поворотов транспортного средства в записях движения. Правые и левые повороты на перекрёстках заключают в себе не только поворачивание транспортного средства, но также и замедление и ускорение до и после поворотов, и изменение предыдущей величины перемещения в силу этого является большим. Соответственно, ошибка обнаружения величины перемещения в направлении спереди назад кузова транспортного средства является большой. Таким образом, когда возникает множество правых и левых поворотов, которые имеют тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0071] Кроме того, устройство оценки собственного положения согласно варианту осуществления уменьшает определённую область по мере того, как возрастает число смен полосы движения транспортного средства в записях движения. При смене полосы движения транспортного средства, возникает перемещение при боковом скольжении кузова транспортного средства, которое является нелинейным и которое заключает в себе большое изменение предыдущей величины перемещения. Соответственно, оценка величины перемещения с высокой точностью является затруднительной, и ошибка обнаружения величины перемещения увеличивается. Таким образом, когда возникает множество смен полосы движения, которые имеют тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0072] Кроме того, устройство оценки собственного положения согласно варианту осуществления уменьшает определённую область по мере того, как возрастает число покиданий полосы и встраиваний на полосу транспортного средства в записях движения. При покидании полосы и встраивании на полсоу транспортного средства, транспортное средство выполняет такие действия, как смены полосы движения и повороты, которые заключают в себе большое изменение предыдущих величин перемещения и которые увеличивают ошибку обнаружения величины перемещения. Таким образом, когда возникает множество покиданий полосы и встраиваний на полосу, которые имеют тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0073] Кроме того, устройство оценки собственного положения согласно варианту осуществления уменьшает определённую область по мере того, как уменьшается радиус кривизны кривой, через которую движется транспортное средство, в записях движения. Когда транспортное средство движется через плотную кривую на высокой скорости транспортного средства, перемещение при боковом скольжении кузова транспортного средства, которое является нелинейным и которое заключает в себе большое изменение предыдущей величины перемещения, возникает аналогично смене полосы движения, и оценка величины перемещения с высокой точностью в силу этого становится затруднительной. Таким образом, когда транспортное средство движется через кривую с небольшим радиусом кривизны, что имеет тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0074] Второй вариант осуществления
Далее описано устройство оценки собственного положения согласно второму варианту осуществления настоящего изобретения со ссылкой на чертежи. Следует отметить, что поскольку конфигурация устройства оценки собственного положения согласно варианту осуществления является идентичной с конфигурацией первого варианта осуществления, ее подробное описание опускается.
[0075] Этапы при обработке оценки собственного положения
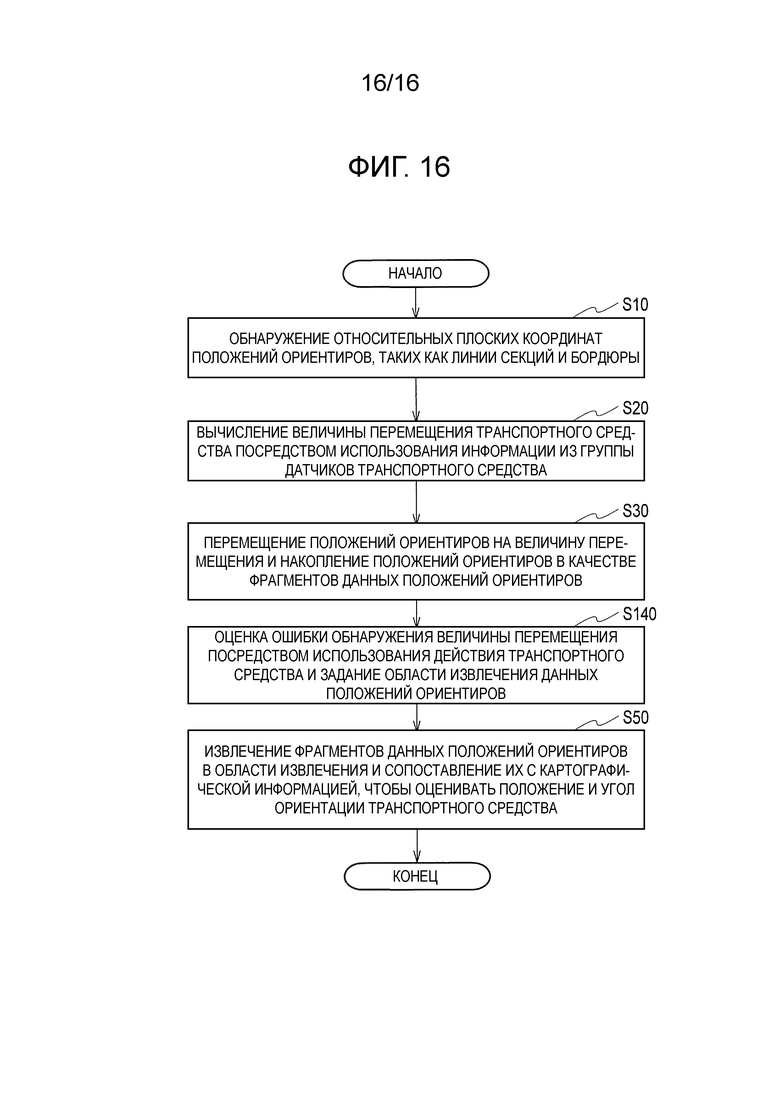
Ниже описаны этапы при обработке оценки собственного положения согласно варианту осуществления со ссылкой на блок-схему способа по фиг. 16. В первом варианте осуществления, ошибка обнаружения величины перемещения оценивается на этапе S40 посредством использования записей движения транспортного средства. Тем не менее, этот вариант осуществления отличается от первого варианта осуществления тем, что на этапе S140, определённая область (область A извлечения) задаётся посредством сосредоточения на действиях транспортного средства в записях движения. Следует отметить, что поскольку этап S10-S30 и этап S50 являются идентичными этапам на фиг. 3 первого варианта осуществления, их подробное описание опускается.
[0076] На этапе S140, модуль 20 оценки собственного положения оценивает ошибку обнаружения величины перемещения транспортного средства посредством использования записей движения и задаёт определённую область (область A извлечения), в которой фрагменты данных положений ориентиров должны извлекаться из модуля 16 накопления положений ориентиров, на основании оценённой ошибки обнаружения величины перемещения. В частности, в варианте осуществления, ошибка обнаружения величины перемещения оценивается посредством использования действия транспортного средства, которое представляет собой изменение предыдущей величины перемещения в записях движения. Конкретные примеры действий транспортного средства, используемых для того оценивать то, что ошибка обнаружения величины перемещения, включают в себя величину поворота транспортного средства.
[0077] Модуль 20 оценки собственного положения вычисляет разность между углом θ(t) ориентации транспортного средства, вычисленным на этапе S50 в предыдущем цикле, и углом θ(t-T) ориентации транспортного средства за время T (с) до текущего момента времени посредством использования записей движения, и получает величину dθ поворота (рад), которая представляет собой изменение величины перемещения. Затем когда абсолютное значение величины dθ поворота, которое представляет собой изменение предыдущей величины перемещения, в общем, равно или превышает пороговое значение dθth, модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является большой. Между тем, когда абсолютное значение величины dθ поворота, которое представляет собой изменение предыдущей величины перемещения, меньше порогового значения dθth, модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является небольшой. Следует отметить, что пороговое значение dθth может задаваться равным, например, 1,745 (рад) ≈ 100 (градусы).
[0078] Когда величина поворота, которая представляет собой изменение величины перемещения транспортного средства, является большой, как описано выше, можно допускать то, что транспортное средство выполняет поворачивание, смены полосы движения, правый или левый повороты или движется по искривленной дороге, что имеет тенденцию вызывать накопление ошибок одометрии. Соответственно, модуль 20 оценки собственного положения может оценивать то, что ошибка обнаружения величины перемещения является большой.
[0079] Когда модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, посредством использования изменения предыдущей величины перемещения в записях движения, модуль 20 оценки собственного положения увеличивает область A извлечения (м), в которой фрагменты данных положений ориентиров должны извлекаться на этапе S50, и задаёт его равным, например, 200 м. Между тем, когда модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, посредством использования изменения предыдущей величины перемещения в записях движения, модуль 20 оценки собственного положения уменьшает область A извлечения (м) и задаёт её равной, например, 100 м. Кроме того, модуль 20 оценки собственного положения может изменять область A извлечения таким образом, что область A извлечения непрерывно уменьшается по мере того, как величина поворота, представляющая собой изменение предыдущей величины перемещения в записях движения, увеличивается. Другими словами, область A извлечения задаётся таким образом, что она уменьшается по мере того, как ошибка обнаружения величины перемещения, оценённая посредством использования изменения предыдущей величины перемещения в записях движения, увеличивается.
[0080] Как описано выше, когда величина поворота транспортного средства является большой, и ошибки одометрии имеют тенденцию накапливаться, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0081] Кроме того, величина dθ поворота может получаться посредством интегрирования абсолютных значений величины Δθ(t) изменения угла относительно вертикальной оси в соответствующие моменты в прошлое время T (с) вплоть до текущего момента t времени, которые записываются в записях движения. В этом способе, модуль 20 оценки собственного положения может обнаруживать то, что фактическая величина поворачивания является большой, даже когда транспортное средство выполняет слаломное вождение и т.п., и кажется, что угол ориентации возвращается к исходному углу.
[0082] Кроме того, модуль 20 оценки собственного положения может обнаруживать, вместо интегрированного значения величин поворота, максимальное абсолютное значение γabs (рад/с) угловой скорости поворота (скорости относительно вертикальной оси) в области A извлечения, и оценивать то, что ошибка обнаружения величины перемещения является большой, когда γabs превышает пороговое значение γth (рад/с). Пороговое значение γth может задаваться равным, например, 0,39 (рад/с) ≈ 20 (градус/с).
[0083] Модифицированный пример 6
В качестве модифицированного примера 6, когда изменение скорости транспортного средства транспортного средства, которое является конкретным примером действия транспортного средства на этапе S140, является большим, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и уменьшает область A извлечения. В этом случае, модуль 20 оценки собственного положения сначала задаёт область A извлечения равной 200 м и обнаруживает максимальное абсолютное значение αabs (м/с2) значения α измерения (м/с2) датчика 46 ускорения, выполненного с возможностью измерения ускорения транспортного средства в направлении спереди назад.
[0084] Затем когда αabs, представляющее собой запись движения, меньше порогового значения αth (м/с2), модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является небольшой, и задаёт область A извлечения равной большому значению, например, выходящему за пределы области A извлечения на уровне 200 м. Между тем, когда αabs, представляющее собой запись движения, в общем, равно или превышает пороговое значение αth, модуль 20 оценки собственного положения оценивает то, что ошибка обнаружения величины перемещения является большой, и задаёт область A извлечения равной небольшому значению, например, 100 м. Пороговое значение αth может задаваться равным, например, 0,2 (м/с2). В этом примере, область A извлечения может непрерывно изменяться в зависимости от αabs.
[0085] Как описано выше, когда транспортное средство значительно изменяет скорость транспортного средства, что имеет тенденцию вызывать накопление ошибок одометрии, область A извлечения уменьшается для уменьшения накопления ошибок одометрии.
[0086] Следует отметить, что модуль 20 оценки собственного положения может измерять ускорения в направлении ширины транспортного средства и направлении сверху вниз транспортного средства посредством использования многоосного датчика в качестве датчика 46 ускорения и выполнять определение на основании комбинированного компонента ускорений. Кроме того, на этапе S140, модуль 20 оценки собственного положения может определять то, выполняет либо нет транспортное средство, например, правый или левый поворот на перекрёстке, смену полосы движения и т.п., из действия транспортного средства и задавать область A извлечения способом, описанным в первом варианте осуществления.
[0087] Преимущества второго варианта осуществления
Как подробно описано выше, устройство оценки собственного положения в варианте осуществления оценивает то, что чем больше величина поворота транспортного средства, которая представляет собой предыдущую величину перемещения в записях движения, тем больше ошибка обнаружения величины перемещения, и уменьшает определённую область (область A извлечения). Когда транспортное средство поворачивает, в дополнение к ошибке обнаружения величины перемещения в направлении поворачивания, ошибка обнаружения величины перемещения в направлении ширины транспортного средства увеличивается вследствие скольжения шин. Таким образом, когда величина поворота транспортного средства является большой в записях движения, что имеет тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0088] Кроме того, устройство оценки собственного положения в варианте осуществления оценивает то, что чем больше переключение скорости транспортного средства находится в записях движения, тем больше ошибка обнаружения величины перемещения, и уменьшает определённую область (область A извлечения). Когда транспортное средство ускоряется или замедляется, изменение предыдущей величины перемещения является большим, и в силу этого ошибка обнаружения величины перемещения в направлении спереди назад транспортного средства является большой. Таким образом, когда изменение скорости транспортного средства является большим в записях движения, что имеет тенденцию вызывать накопление ошибок обнаружения величины перемещения, накопление ошибок обнаружения величины перемещения может уменьшаться посредством уменьшения определённой области (области A извлечения), и это обеспечивает стабильную оценку собственного положения с высокой точностью.
[0089] Следует отметить, что варианты осуществления, описанные выше, являются примерами настоящего изобретения. Настоящее изобретение в силу этого не ограничено посредством вышеописанных вариантов осуществления, и, как и следовало ожидать, режимы, отличные от вышеописанных вариантов осуществления, могут выполняться посредством внесения различных изменений в зависимости от конструкций и т.п. в пределах объёма без отступления от технической идеи настоящего изобретения.
[0090] В частности, хотя в вышеприведённом варианте осуществления описаны примеры с использованием транспортного средства, настоящее изобретение может применяться к любому подвижному объекту, таком как самолёт или судно, при условии, что подвижный объект имеет датчик для измерения одометрии и одно или оба по меньшей мере из одной камеры и по меньшей мере одного лазерного дальномера. Кроме того, хотя положение и угол ориентации транспортного средства с тремя степенями свободы получаются в вышеприведённом варианте осуществления, положения и углы ориентации с шестью степенями свободы могут оцениваться.
Список условных обозначений
[0091] 1 - ECU
2, 2a, 2b - камера
3 - трехмерная картографическая база данных
4 - группа датчиков транспортного средства
5, 5a, 5b - лазерный дальномер
10 - устройство оценки собственного положения
12 - детектор положений ориентиров
14 - детектор величины перемещения
16 - модуль накопления положений ориентиров
18 - модуль получения картографической информации
20 - модуль оценки собственного положения
41 - приёмное GPS-устройство
42 - датчик акселератора
43 - датчик рулевого управления
44 - датчик торможения
45 - датчик скорости транспортного средства
46 - датчик ускорения
47 - датчик скорости вращения колес
48 - датчик скорости относительно вертикальной оси
Группа изобретений относится к области оценки собственного положения. Оценка собственного положения осуществляется по способу устройством, которое обнаруживает положение ориентира для ориентира, присутствующего в окружении подвижного объекта, обнаруживает величину перемещения подвижного объекта и накапливает положения ориентиров, каждый из которых получается посредством перемещения обнаруженного положения ориентира на величину перемещения. Затем получает картографическую информацию, включающую в себя положения ориентиров, присутствующих на карте, посредством контроллера, сопоставляет фрагменты данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценивает собственное положение подвижного объекта, причём определённая область задаётся на основании записей перемещения подвижного объекта, движущегося в текущее положение. Обеспечивается повышение точности оценки собственного положения. 2 н. и 7 з.п. ф-лы, 16 ил.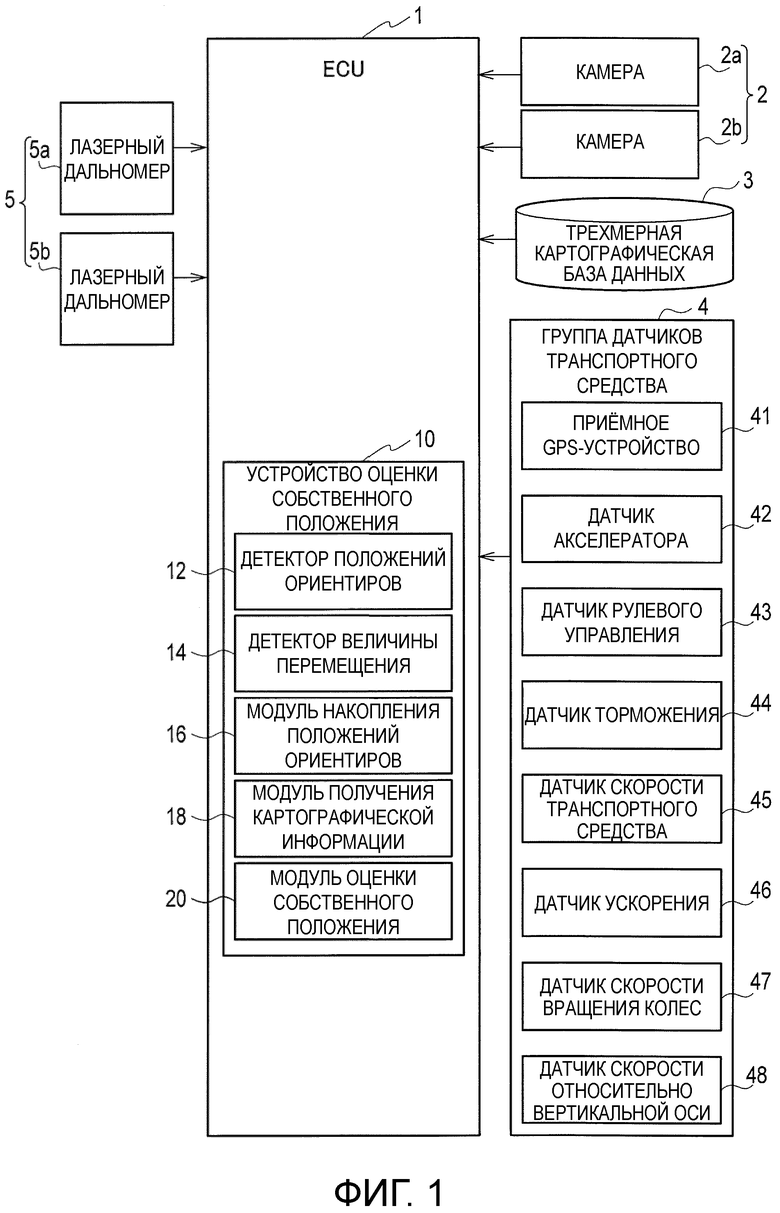
1. Устройство оценки собственного положения, выполненное с возможностью оценки собственного положения подвижного объекта, причём устройство оценки собственного положения содержит:
детектор положений ориентиров, выполненный с возможностью обнаружения положения ориентира для ориентира, присутствующего в окружении подвижного объекта;
детектор величины перемещения, выполненный с возможностью обнаружения величины перемещения подвижного объекта;
модуль накопления положений ориентиров, выполненный с возможностью накопления, в качестве фрагментов данных положений ориентиров, положений ориентиров, каждое из которых получается посредством перемещения положения ориентира, обнаруженного посредством детектора положений ориентиров, на величину перемещения, обнаруженную посредством детектора величины перемещения;
модуль получения картографической информации, выполненный с возможностью получения картографической информации, включающей в себя положения ориентиров для ориентиров, присутствующих на карте; и
модуль оценки собственного положения, выполненный с возможностью сопоставления фрагментов данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценки собственного положения подвижного объекта, причём определённая область задаётся на основании факторов ошибки в записях перемещения подвижного объекта, движущегося в текущее положение.
2. Устройство оценки собственного положения по п. 1, в котором модуль оценки собственного положения уменьшает определённую область по мере того, как возрастает изменение предыдущей величины перемещения подвижного объекта в записях перемещения.
3. Устройство оценки собственного положения по п. 1 или 2, в котором:
подвижный объект представляет собой транспортное средство, и
модуль оценки собственного положения уменьшает определённую область по мере того, как возрастает число правых и левых поворотов транспортного средства в записях перемещения.
4. Устройство оценки собственного положения по п. 1 или 2, в котором:
подвижный объект представляет собой транспортное средство, и
модуль оценки собственного положения уменьшает определённую область по мере того, как возрастает число смен полосы движения транспортного средства в записях перемещения.
5. Устройство оценки собственного положения по п. 1 или 2, в котором:
подвижный объект представляет собой транспортное средство, и
модуль оценки собственного положения уменьшает определённую область по мере того, как возрастает число покиданий полосы и встраиваний на полосу транспортного средства в записях перемещения.
6. Устройство оценки собственного положения по п. 1 или 2, в котором:
подвижный объект представляет собой транспортное средство, и
модуль оценки собственного положения уменьшает определённую область по мере того, как уменьшается радиус кривизны кривой, через которую движется транспортное средство, в записях перемещения.
7. Устройство оценки собственного положения по п. 1 или 2, в котором:
модуль оценки собственного положения уменьшает определённую область по мере того, как возрастает величина поворота подвижного объекта в записях перемещения.
8. Устройство оценки собственного положения по п. 1 или 2, при этом устройство оценки собственного положения уменьшает определённую область по мере того, как возрастает изменение скорости перемещения подвижного объекта в записях перемещения.
9. Способ оценки собственного положения для оценки собственного положения подвижного объекта, причём способ оценки собственного положения содержит этапы, на которых:
обнаруживают положение ориентира для ориентира, присутствующего в окружении подвижного объекта, посредством контроллера, установленного на подвижном объекте;
обнаруживают величину перемещения подвижного объекта посредством контроллера;
накапливают, в качестве фрагментов данных положений ориентиров, положения ориентиров, каждое из которых получается посредством перемещения обнаруженного положения ориентира на обнаруженную величину перемещения посредством контроллера;
получают картографическую информацию, включающую в себя положения ориентиров для ориентиров, присутствующих на карте, посредством контроллера; и
согласуют фрагменты данных положений ориентиров в определённой области с положениями ориентиров, включёнными в картографическую информацию, и оценивают собственное положение подвижного объекта посредством контроллера, причём определённая область задаётся на основании факторов ошибки в записях перемещения подвижного объекта, движущегося в текущее положение.
| EP 1334869 A2, 13.08.2003 | |||
| US 2014214271 A1, 31.07.2014 | |||
| WO 2014083410 A1, 05.06.2014. |

