Заявляемое техническое решение применимо в пожарной технике, в водоснабжении, в химической и пищевой промышленностях.
Предлагаемое изобретение предназначено для автоматического контроля технического состояния кранов трубопроводных, выполненных с поворотными запорными деталями, имеющими седловую поверхность, форма которой представляет собой поверхность тела вращения, и для поддержания работоспособности кранов в процессе эксплуатации.
Одной из проблем эксплуатации кранов трубопроводных, длительно находящихся в статическом (закрытом или открытом) состоянии, является засорение зазора между седлом крана и запорной деталью микрочастицами жидкости, при этом возникает взаимная диффузия в поверхностных слоях контактирующих областей седла и запорной детали.
Возникающие связи между седлом и запорной деталью приводят к увеличению коэффициента трения при повороте запорной детали (цилиндра, или конуса, или шара), что вызывает необходимость прилагать значительные крутящие моменты к валу запорной детали.
При длительной неподвижности запорной детали относительно седла возникающее увеличение коэффициента трения может привести к заклиниванию запорной детали в седле и выходу из строя крана.
Целью предлагаемого изобретения является увеличение срока службы и одновременный автоматический контроль подвижности поворотного механизма крана, включая контроль коэффициента трения между седлом и запорной деталью.
Технический результат должен выражаться в автоматическом контроле и поддержании коэффициента трения между седлом крана и запорной деталью в заданных пределах во время эксплуатации крана.
Известен способ устранения заедания клапана RU 2001134610, выполненного по типу клапана, который имеет корпус, входной патрубок, расположенное в корпусе между входным и выходным патрубком седло и запорный элемент, который взаимодействует с седлом, и при его перемещении относительно седла используется вместе с седлом для изменения степени открытия клапана, заключающийся в том, что а) в стенке корпуса клапана рядом с его ставшими неподвижными в результате заедания элементами сверлят одно или несколько нагнетательных отверстий, б) внутрь клапана через одно или каждое из этих нагнетательных отверстий под избыточным давлением закачивают обрабатывающую жидкость, попадающую на ставшие неподвижными в результате заедания элементы клапана, и в) закрывают одно или каждое нагнетательное отверстие, через которое или через которые внутрь клапана закачивают обрабатывающую жидкость.
В этом способе через полученные в корпусе отверстия оказывают на элементы клапана физическое и/или химическое воздействия, разрушая образовавшиеся между седлом и запорным элементом отложения, и способствуют выведению наружу остатков отложений, при этом степень подвижности элементов клапана определяют через контрольные отверстия визуально либо при помощи зонда.
Недостатками такого способа являются: отсутствие в процессе эксплуатации крана автоматического контроля степени подвижности поворотного механизма крана; отсутствие возможности без вскрытия внутреннего пространства крана активного воздействия на вредные отложения, возникающие во время эксплуатации внутри крана; невозможность извещать о рабочем или аварийном состоянии крана.
Поставленная цель достигается при помощи способа активного контроля и поддержания подвижности поворотного механизма крана, характеризуемого принудительным воздействием на сопрягаемые области седла и запорной детали, испытывающие в процессе эксплуатации увеличение коэффициента трения между ними, согласно изобретению, осуществляют автоматически по заданному алгоритму при помощи прибора автоматического контроля и управления подачу разнополярных электроимпульсов от блока электропитания на электропривод крана, обеспечивают разнонаправленные колебательные микродвижения запорной детали в седле крана при помощи электродвигателя через механический редуктор, соединенный с валом запорной детали, при этом разрушают вредные отложения, возникающие между седлом и запорной деталью, одновременно измеряют при помощи схемы управления электродвигателем и при помощи измерителя электрических параметров электродвигателя прибора автоматического контроля и управления изменения формы и силы тока, потребляемого электродвигателем, определяют посредством микроконтроллера и заданной программы по измеренным результатам изменения коэффициента трения между седлом и запорной деталью и контролируют степень подвижности поворотного механизма крана.
Программируют заданный алгоритм работы (длительность импульсов, скважность импульсов, количество импульсов, амплитуда импульсов) прибора автоматического контроля и управления с учетом меняющейся во времени эксплуатации структуры связей между седлом и запорной деталью.
Информируют с помощью блока индикации и сигнализации прибора автоматического контроля и управления о степени подвижности поворотного механизма крана.
Управляют дистанционно работой крана с помощью отдельных входов прибора автоматического контроля и управления.
Тестируют на исправность блок электропитания и прибор автоматического контроля и управления с помощью узла тестирования прибора автоматического контроля и управления.
В заявляемом способе разрушительное воздействие на вредные отложения осуществляют автоматически без остановки технологического процесса, в котором участвует кран; в известном способе разрушение отложений требует вывода крана из технологического процесса и требует целого ряда ручных операций. Кроме того, возникает необходимость в известном способе выполнения дополнительных нагнетательных и контрольных отверстий в кране для нагнетания обрабатывающих жидкостей и для размещения измерительных зондов.
Предложенное техническое решение, по сравнению с известным способом, является более простым, менее трудоемким и менее материалозатратным, обеспечивает автоматический контроль коэффициента трения между седлом и запорной деталью крана, от которого зависит степень подвижности поворотного механизма крана и его исправность.
Поставленная цель может быть достигнута конкретным устройством за счет того, что в устройстве активного контроля подвижности поворотного механизма крана, согласно изобретению, выполнена посредством редуктора механическая связь между валом запорной детали крана и ротором электродвигателя, который связан электропроводами с прибором автоматического контроля и управления, который связан электропроводно с блоком электропитания, при этом прибор автоматического контроля и управления выполнен с возможностью управления через редуктор микроповоротами запорной детали в прямом и обратном направлениях и с одновременной возможностью контроля коэффициента трения между запорной деталью и седлом крана, причем прибор автоматического контроля и управления содержит электронный модуль с микроконтроллером с возможностью управления прибором по определенным алгоритмам, на печатной плате электронного модуля расположены связанные между собой схема управления электропитанием электродвигателя и измеритель электрических параметров электродвигателя, по отдельности соединенные с электродвигателем и с микроконтроллером, дополнительно на печатной плате электронного модуля установлены соединенные с микроконтроллером органы управления устройством и входы для внешнего (дистанционного) управления краном, смонтирован блок индикации и сигнализации о состоянии режимов работы устройства и о степени подвижности поворотного механизма крана, расположены выходы на внешнее оборудование, выполнен узел тестирования на исправность прибора и на исправность источника питания, соединенные между собой.
Предлагаемое устройство активного контроля подвижности поворотного механизма крана позволяет осуществлять автоматически по заданной программе разнонаправленные микроповороты запорной детали в седле крана, которые будут разрушать нежелательные возникающие связи, не вызывая при этом изменения положения крана (закрытое или открытое), и способствовать удалению из зазора между седлом и запорной деталью частиц этих связей. Кроме того, предлагаемое устройство позволяет во время колебательных микроповоротов контролировать степень подвижности поворотного механизма крана, включая степень подвижности запорной детали относительно седла, имея в виду, что измеряемые параметры электродвигателя зависят от коэффициента трения.
Более подробно суть полезной модели поясняется при помощи чертежей на фигурах 1, 2.
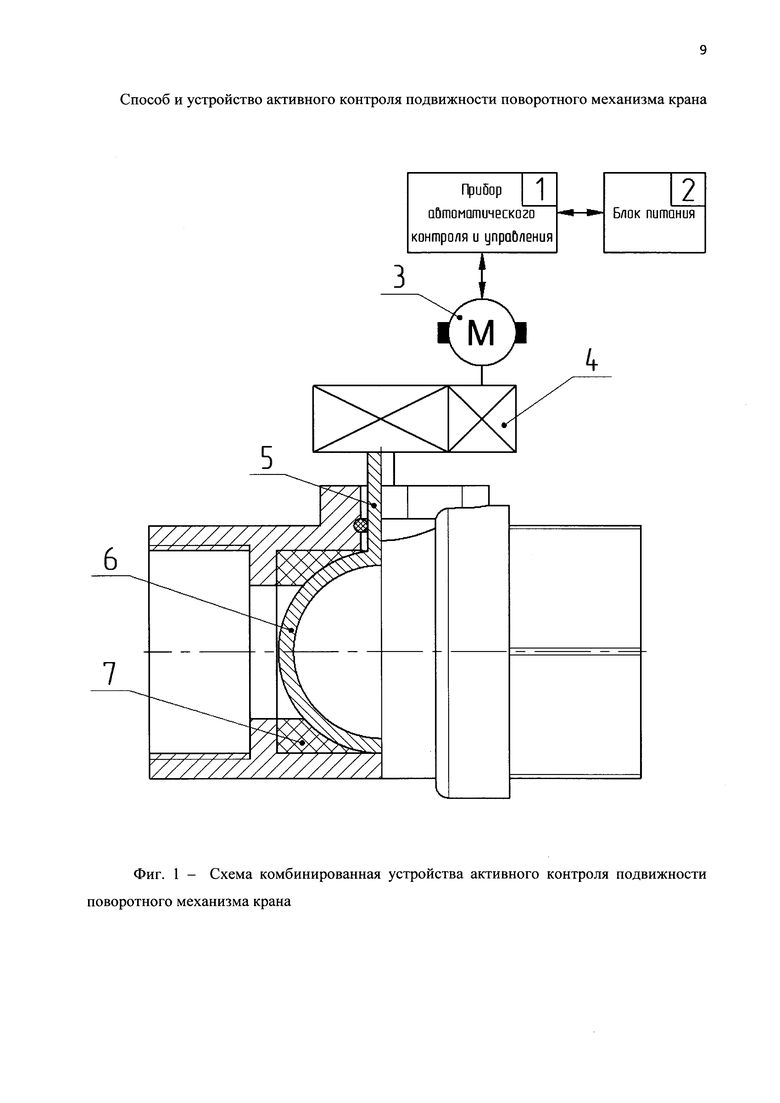
Фиг. 1 - Схема комбинированная устройства активного контроля и поддержания подвижности поворотного механизма крана.
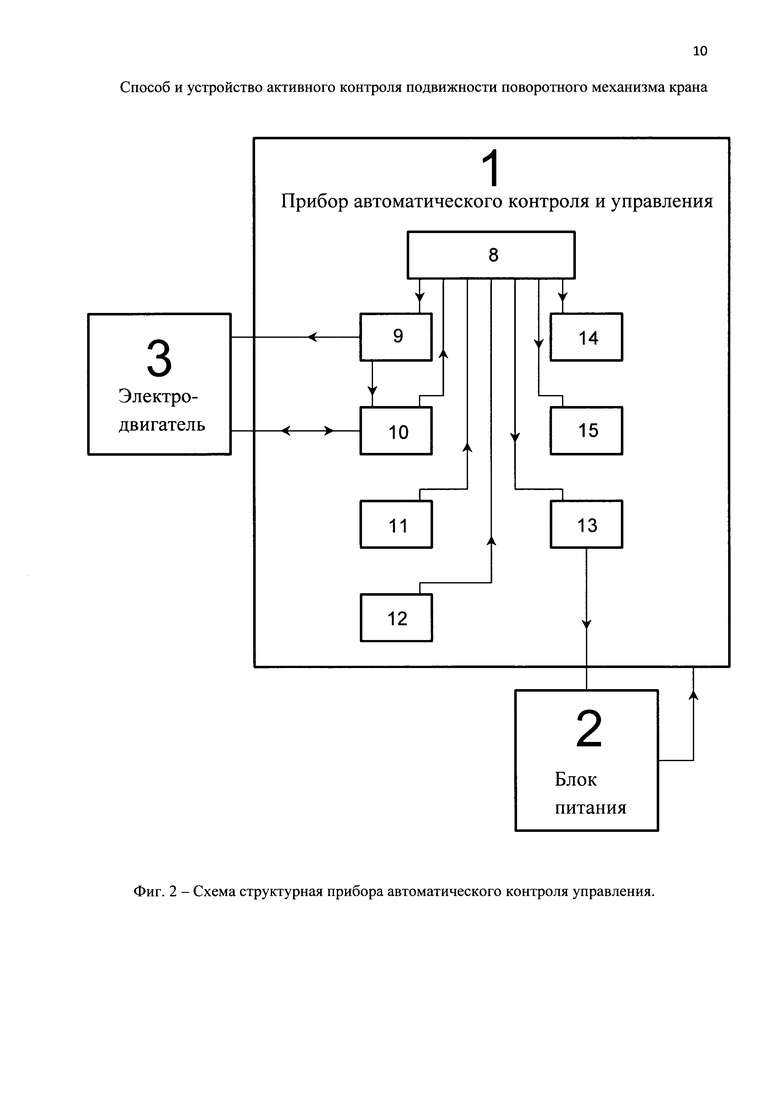
Фиг. 2 - Схема структурная прибора автоматического контроля и управления.
Основой заявляемого устройства служит прибор 1 автоматического контроля и управления, питаемый от блока питания 2. Прибор электрически связан с электродвигателем 3, который соединен при помощи редуктора 4 с валом 5 запорной детали (шара) 6, установленной в седле 7 крана.
Основой прибора 1 автоматического контроля и управления служит микроконтроллер 8, который через схему 9 управления электропитанием электродвигателя связан с электродвигателем 3 и с измерителем 10 электрических параметров электродвигателя, при этом измеритель имеет дополнительную непосредственную связь с микроконтроллером, кроме того, микроконтроллер соединен с органами 11 управления устройства и с входами 12 внешнего (дистанционного) управления краном, микроконтроллер соединен с узлом 13 тестирования на исправность прибора и блока его питания, микроконтроллер связан с блоком 14 индикации и сигнализации и имеет выходы 15 для трансляции сигналов о состоянии устройства на внешнее оборудование.
Устройство активного контроля и поддержания подвижности поворотного механизма, включающего в себя электродвигатель 3 с редуктором 4 и соединенную через вал 5 запорную деталь 6, осуществляет при помощи прибора 1 в автоматическом режиме работы по заданному алгоритму подачу разнополярных импульсов питания от блока питания 2 на электродвигатель 3, представляющий собой электромашину постоянного тока. Под действием импульсов питания электродвигатель совершает разнонаправленные вращающие движения, которые через редуктор 4 передаются на вал 5 запорной детали 6, запорная деталь в седле 7 совершает микроколебания вокруг оси, вызывая разрушение нежелательных вредных связей, возникающих при длительном застойном состоянии запорной детали в седле.
Алгоритм работы прибора 1 задает его программируемый микроконтроллер 8, для установки режима работы выполнены органы управления 11, причем для дистанционного управления выполнены дополнительные входы 12. Для проверки исправности самого прибора 1 и для проверки исправности блока 2 питания в приборе функционирует узел 13 тестирования на исправность. С помощью блока 14 осуществляется световая индикация о состоянии режимов работы устройства, в т.ч. о степени подвижности поворотного механизма, кроме того, блок имеет возможность предавать сообщения на дополнительные средства сигнализации, включая звуковые. Трансляция сигналов на внешнее оборудование, например на пульт управления объекта, осуществляется через выходы 15. Питающие импульсы на электродвигатель 3 поступают через схему 9 управления электродвигателем, при этом измеритель 10, связанный одновременно с электродвигателем и со схемой, измеряет основные параметры питания (полярность, форму и силу тока, длительность импульса и т.п.) и передает измеренные значения в микроконтроллер 8, который на основе заданной программы по изменениям параметров питания определяет степень подвижности поворотного механизма, контролирует коэффициент трения между седлом и запорной деталью, на предмет его выхода за заданные пределы.
На основе вышеизложенного можно утверждать, что предлагаемый способ и устройство обеспечивают возможность, во-первых, автоматически по заданному алгоритму разрушать возникающие вредные связи между запорной деталью и седлом крана, во-вторых, по измеряемым параметрам электропитания двигателя контролировать степень подвижности поворотного механизма, в-третьих, своевременно извещать посредством индикации и сигнализации о состоянии крана, в-четвертых, оптимизировать за счет адаптивного алгоритма работы расход потребляемой электроэнергии и снизить износ седла и запорной детали. Все вышеперечисленные преимущества позволяют поддерживать автоматически работоспособное состояние крана и продлевать срок его службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И АВТОНОМНОЕ ПОЖАРНОЕ СИГНАЛЬНО-ПУСКОВОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744900C1 |
| СПОСОБ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ СКЛАДОВ СО СТЕЛЛАЖНЫМ ХРАНЕНИЕМ И УСТРОЙСТВО СИГНАЛЬНО-ПУСКОВОЕ АВТОНОМНОЕ АВТОМАТИЧЕСКОЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2671122C1 |
| СПОСОБ АДАПТИВНОГО КОНТРОЛЯ ПОЖАРНОЙ ОПАСНОСТИ И АДАПТИВНОГО ТУШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2604300C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И УПРАВЛЕНИЯ НЕСТАНДАРТНОЙ СИТУАЦИЕЙ, ИНТЕЛЛЕКТУАЛЬНАЯ СТАНЦИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2589617C1 |
| ДОЗАТОР НАПОРНЫЙ АВТОМАТИЧЕСКИЙ С ВОЗМОЖНОСТЬЮ ПЕРЕКАЧКИ ПЕНООБРАЗОВАТЕЛЯ ИЗ ТРАНСПОРТНОЙ ЕМКОСТИ В ИСТОЧНИК ПЕНООБРАЗОВАТЕЛЯ | 2022 |
|
RU2812106C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2005 |
|
RU2290745C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2021 |
|
RU2780757C1 |
| СИСТЕМА И СПОСОБЫ ПОЖАРОТУШЕНИЯ | 2019 |
|
RU2730962C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
Способ и устройство активного контроля и поддержания подвижности поворотного механизма крана трубопроводного предназначены для автоматического контроля технического состояния крана и для поддержания его работоспособности в процессе эксплуатации, не допуская увеличения коэффициента трения между запорной деталью и седлом в кране. В устройстве выполнена механическая связь посредством редуктора между валом и запорной деталью крана и электродвигателем, который связан с прибором автоматического контроля и управления, с возможностью управления микроповоротами запорной детали в корпусе, с возможностью измерения электрических параметров электродвигателя, по которым контролируется коэффициент трения. 2 н. и 4 з.п. ф-лы, 2 ил.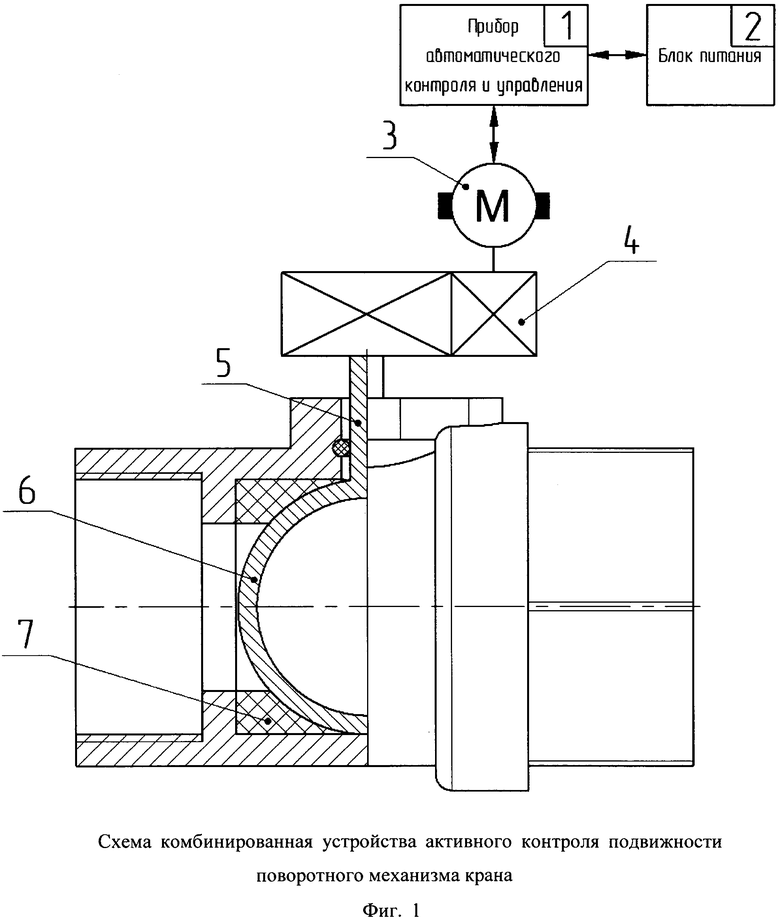
1. Способ активного контроля подвижности поворотного механизма крана путем воздействия на сопрягаемые области седла и запорной детали, испытывающих в процессе эксплуатации увеличение коэффициента трения между ними, отличающийся тем, что осуществляют автоматически по заданному алгоритму при помощи прибора автоматического контроля и управления подачу разнополярных электроимпульсов от блока электропитания на электропривод крана, обеспечивают разнонаправленные колебательные микродвижения запорной детали в седле крана при помощи электродвигателя через механический редуктор, соединенный с валом запорной детали, при этом разрушают вредные отложения, возникающие между седлом и запорной деталью, одновременно измеряют при помощи схемы управления электродвигателем и при помощи измерителя электрических параметров электродвигателя прибора автоматического контроля и управления изменения формы и силы тока, потребляемого электродвигателем, определяют посредством микроконтроллера и заданной программы по измеренным результатам изменения коэффициента трения между седлом и запорной деталью и контролируют степень подвижности поворотного механизма крана.
2. Способ по п. 1, отличающийся тем, что заданный алгоритм работы (длительность импульсов, скважность импульсов, количество импульсов, амплитуда импульсов) прибора автоматического контроля и управления программируют с учетом меняющейся во времени эксплуатации структуры связей между седлом и запорной деталью.
3. Способ по п. 1, отличающийся тем, что информируют с помощью блока индикации и сигнализации прибора автоматического контроля и управления о степени подвижности поворотного механизма крана.
4. Способ по п. 1, отличающийся тем, что управляют дистанционно работой крана с помощью отдельных входов прибора автоматического контроля и управления.
5. Способ по п. 1, отличающийся тем, что тестируют на исправность блок электропитания и прибор автоматического контроля и управления с помощью узла тестирования прибора автоматического контроля и управления.
6. Устройство активного контроля подвижности поворотного механизма крана, характеризующееся тем, что выполнена посредством редуктора механическая связь между валом запорной детали крана и ротором электродвигателя, который связан электропроводами с прибором автоматического контроля и управления, который связан электропроводно с блоком электропитания, при этом прибор автоматического контроля и управления выполнен с возможностью управления через редуктор микроповоротами запорной детали в прямом и обратном направлениях и с одновременной возможностью контроля коэффициента трения между запорной деталью и седлом крана, причем прибор автоматического контроля и управления содержит электронный модуль с микроконтроллером с возможностью управления прибором по определенным алгоритмам, на печатной плате электронного модуля расположены связанные между собой схема управления электропитанием электродвигателя и измеритель электрических параметров электродвигателя, по отдельности соединенные с электродвигателем и с микроконтроллером, дополнительно на печатной плате электронного модуля установлены соединенные с микроконтроллером органы управления устройством и входы для внешнего (дистанционного) управления краном, смонтирован блок индикации и сигнализации о состоянии режимов работы устройства и о степени подвижности поворотного механизма крана, расположены выходы на внешнее оборудование, выполнен узел тестирования на исправность прибора и на исправность блока питания, соединенные между собой.
| US 6698444 B1, 02.03.2004 | |||
| JP 2001295956 A, 26.10.2001 | |||
| DE 3920365 C1, 10.05.1990 | |||
| Способ промывки забоя буровых скважин | 1950 |
|
SU86689A1 |
| Устройство для контроля технического состояния гидропривода | 1980 |
|
SU926388A1 |

