Область техники, к которой относится изобретение
Предлагаемый способ относится к области обработки цифровых данных с помощью электрических устройств в технике связи и может использоваться в системах передачи данных автоматизированных систем управления (АСУ) жестко регламентированного реального масштаба времени.
Уровень техники
В АСУ с жестко регламентированным масштабом времени в трактах передачи данных задержки передачи информации с течением времени становятся все более значимым фактором.
Повышение скоростей воздушных и космических объектов в разы приводит к увеличению значения величины задержки передачи данных от объекта к взаимодействующему объекту АСУ. Величина задержки в свою очередь определяет величину погрешности координат контролируемого объекта. Поэтому в условиях возрастающих скоростей контролируемых объектов погрешности, определяемые задержками при передаче данных, становятся недопустимыми.
Большие территориальные автоматизированные системы жестко регламентированного реального масштаба времени или, иначе говоря, АСУ с высокой реактивностью на поступающие в систему данные, такие как АСУ для управления воздушным движением (УВД), АСУ для противовоздушной обороны (ПВО), АСУ для противоракетной обороны (ПРО), АСУ для воздушно-космической обороны (ВКО) предъявляют жёсткие требования к техническим средствам и к программному обеспечению в части временных задержек (далее - задержек) передачи данных от объекта к объекту. Время доведения и обработки поступающей информации в подобных системах составляет десятки и даже сотни миллисекунд.
Переменные задержки возникают в вычислительных машинах в комплексах обработки информации (в центральных вычислительных машинах и в машинах передачи данных) из-за периодичности по времени включения программ, из-за включения прерывающих программ, из-за периодических включений других потоков при многопотоковой работе программ, из-за сбоев работы программ и из-за процедур обмена информацией между вычислительными машинами. Переменные задержки возникают в устройствах защиты от ошибок (УЗО), работающих в названных системах в режиме с решающей обратной связью и повторной передачей данных. При поражении принимаемых данных, кодограмм, ошибками возникают переспросы, и затем происходит повторная передача данных, блока кодограмм.
Повторение передачи кодограмм является случайным процессом, в результате которого порождается случайная задержка. В устройствах преобразования сигналов при передаче из-за группирования кодовых комбинаций передаваемых данных в дибиты, трибиты, тетрабиты и так далее и при обратном разгруппирования их на биты при приеме, а также из-за прохождения потока данных через скремблер на передаче и через дескремблер на приёме также возникают случайные задержки. Случайные задержки возникают также аналогичным образом в аппаратуре засекречивания-рассекречивания данных. Результирующее значение случайной задержки при передаче данных по трактам устройств аппаратуры равно сумме всех ее составляющих и может достигать значительных величин.
Возникновение временных задержек передачи кодограмм по трактам устройств аппаратуры передачи данных приводит к тому, что кодограмма, содержащая, к примеру, текущие координаты контролируемого воздушного объекта или цели, принятая с запозданием, указывает местоположение этого объекта с ошибкой. Величина ошибки зависит от задержки передачи данных и от скорости передвижения объекта, цели. В результате возможны потери целей, перепутывание целей и в итоге снижение эффективности работы АСУ в целом. С развитием авиации происходит резкое повышение скоростей летательных аппаратов, в настоящее время скорости уже достигают нескольких скоростей звука. Развитие систем ПВО до требований ВКО, где скорости уже космические, резко обостряет проблему борьбы с временными задержками при приеме и передаче информационных данных.
Известен способ учёта составляющих постоянной (t0) и случайной (Δt) временной задержки передачи данных по трактам передачи данных, описанный в книге «Общесистемное проектирование АСУ реального времени», под редакцией Шабалина В.А., издательство “Радио и связь”, 1984г. стр. 171 и 178. Данный способ заключается в необходимости учитывать величину математического ожидания (MΔt) составляющей случайной задержки и точное знание величины постоянной задержки t0, которую можно измерить.
Недостатком данного способа является невысокая точность определения совокупной задержки (t = t0 + Δt) из-за определения составляющей случайной задержки только через её математическое ожидание (MΔt).
Наиболее близким к предлагаемому является способ учёта временных задержек передачи данных в АСУ реального масштаба времени, рассмотренный авторами Савватеевым В.С. и Суховым В.В. в статье «Задержки передачи сообщений по трактам ПД в АСУ ВКО и методы борьбы с ними», сборник статей «КНИИТМУ», «Новые информационные технологии в системах связи и управления», 2012 г., стр. 99-107. Авторами показано, насколько существенное влияние на эффективность АСУ оказывают как постоянные, так и переменные задержки при прохождении сообщений через многозвенную структуру типового тракта передачи данных, и рассмотрен способ борьбы с задержками в существующих системах ПВО.
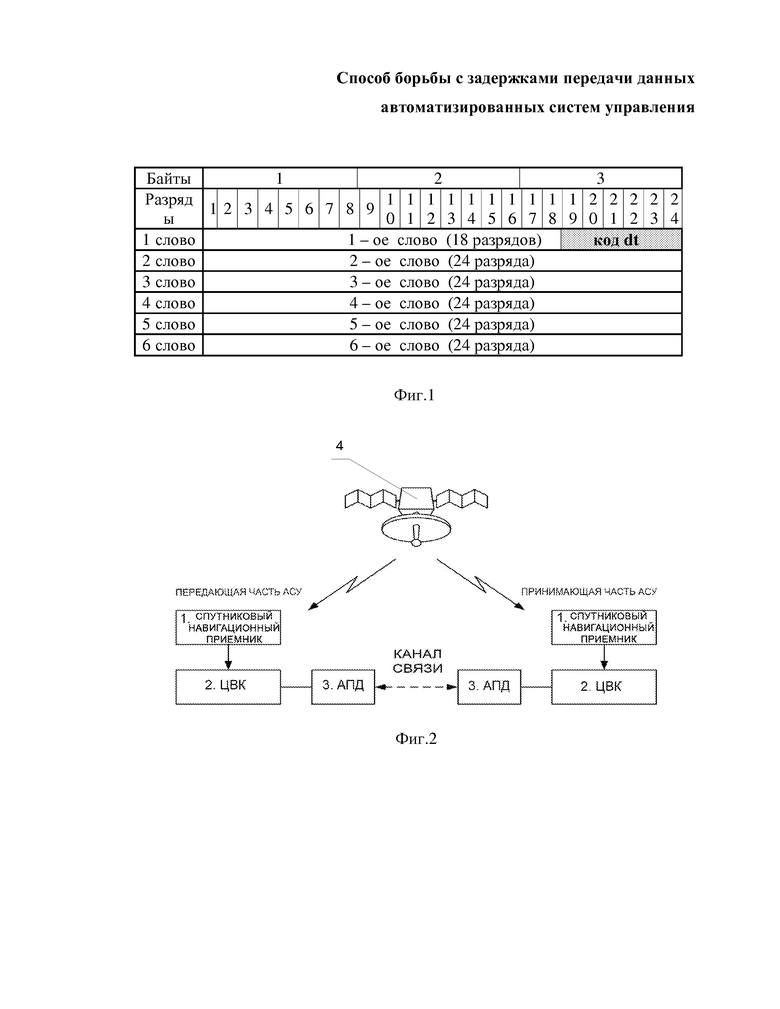
Известный способ заключается в том, что для обмена по трактам передачи данных используется типовая шестисловная кодограмма на основе алгоритма кодограммы «Аккорд СС-ПД 165/144», содержащая с целью учета временных задержек в первом слове шесть разрядов кода времени dt (см. фиг.1). В периоды нахождения сообщений в буферах в ЭВМ и ждущих обработки контролируется время ожидания, и в случае превышения фиксированного времени цены младшего разряда каждый раз код времени dt увеличивается на единицу. Цена деления младшего разряда кода времени dt равна 0,03129 секундам, что обеспечивает пределы измерения задержки в диапазоне от 0 до 1,96875 секунд. Верхняя граница диапазона измерения является достаточной для учёта задержек в АСУ ПВО.
Недостатком существующего способа является то, что он позволяет бороться только со случайными задержками, возникающими в буферах ЭВМ в периоды ожидания начала обработки, и не решает проблему в целом, так как не учитываются задержки, возникающие в устройствах защиты от ошибок, в устройствах преобразования сигналов, в устройствах засекречивания-рассекречивания.
Кроме того, цена младшего разряда кода времени dt, равная 0,03129 секундам, для учета задержек очень груба, и увеличение количества разрядов кода времени dt невозможно из-за того, что практически все разряды в кодограммах обычно заняты. По современным представлениям цена разряда кода времени dt для учета задержек не должна превышать единиц миллисекунд. В итоге можно констатировать: существующий способ не обеспечивает необходимой точности учета задержек, так как позволяет бороться только с задержками, возникающими в буферах ЭВМ, и не решает проблем задержек, возникающих в процессе передачи по другим причинам.
Раскрытие изобретения
Задачей заявляемого изобретения является обеспечение формирования группового сигнала и передачи его, независимо напрямую или через промежуточные узлы АСУ, на значительные расстояния с возможностью получения предельно точных информационных данных об объектах, целях.
Техническим результатом изобретения является получение способа точного учета составляющих как постоянной, так и случайной временной задержки передаваемых информационных данных по трактам в АСУ реального масштаба времени.
Указанный технический результат достигается тем, что способ борьбы с задержками передачи данных автоматизированной системы управления (АСУ) реального масштаба времени заключается в использовании в составе кодовой комбинации кодограммы передаваемых данных разрядов кода времени.
В качестве кода времени в способе используют код высокоточного времени, которое получают в передающей и принимающей частях АСУ синхронизированным от спутника связи.
В кодограмму в передающей части АСУ вписывают текущее значение кода высокоточного времени момента передачи ТПЕР кодограммы данных. В принимающей части АСУ фиксируют текущее значение кода высокоточного времени момента приема ТПРМ кодограммы данных и вычисляют результирующую величину задержки передачи данных ТРЕЗ.
Результирующую величину задержки ТРЕЗ определяют как разница значения высокоточного времени при приеме и соответствующего ему значения при передаче данных ТРЕЗ = ТПРМ - ТПЕР, где ТПЕР – текущее значение кода высокоточного времени при передаче данных, ТПРМ – текущее значение кода высокоточного времени при приеме данных.
Краткое описание чертежей
На фигурах изображены структурная схема передачи данных и вид кодограммы, поясняющие заявляемое изобретение.
Фиг.1 - вид типовой кодограммы аппаратуры передачи данных (АПД) «Аккорд СС-ПД 165/144», используемой в автоматизированных системах управления (АСУ) специального назначения и работающих в реальном масштабе времени;
Фиг.2 - структурная схема передачи данных между передающей и принимающей частями АСУ реального масштаба времени.
На фиг.2 цифрами обозначены следующие позиции:
1 – спутниковый навигационный приемник; 2 – цифровой вычислительный комплекс (ЦВК); 3 – аппаратура передачи данных (АПД); 4 – спутник связи.
Осуществление изобретения
Реализация предлагаемого способа поясняется и показана на структурной схеме передачи данных между передающей и принимающей частями АСУ реального масштаба времени (см. фиг.2).
Способ борьбы с задержками передачи данных АСУ реального масштаба времени осуществляется нижеследующим образом.
На передающую и приемную части АСУ посредством спутниковых навигационных приемников 1 получают со спутника связи 4, на котором установлено соответствующее оборудование, высокоточное время. Спутниковым навигационным приемником 1 оборудована принимающая и передающая части АСУ, поэтому высокоточное время принимающей части АСУ синхронизировано с высокоточным временем источника кодограммы данных передающей части АСУ. Получаемое со спутника связи 4 синхронизированное высокоточное время используют в кодограммах при передаче данных.
Кодограмма данных предлагаемого способа содержит в качестве кода времени, обозначенного как dt, код высокоточного времени с ценой разряда в диапазоне единиц миллисекунд. Исходя из максимальной величины учитываемой задержки ТРЕЗ, выбирают необходимое количество разрядов кода высокоточного времени в кодограмме данных.
В качестве примера при осуществлении предлагаемого способа приведен вид типовой кодограммы данных «Аккорд СС-ПД 165/144», используемой в автоматизированных системах специального назначения и работающих в реальном масштабе времени (см. фиг.1).
Кодограмма данных может формироваться в том формате, который наилучшим образом отвечает требованиям тех или иных вероятностно-временных характеристик (ВВХ). Поэтому виды кодограмм данных могут быть различны и каждая отдельная вновь сформированная кодограмма может отличаться и должна быть не обязательно в виде кодограммы Аккорд СС-ПД 165/144 (см. фиг.1).
В соответствии с указанными требованиями в цифровом вычислительном комплексе (ЦВК) 2 передающей части АСУ при формировании сообщений в отношении контролируемого объекта в кодограмму данных для учета задержек в качестве кода времени dt вписывают текущее значение кода высокоточного времени момента передачи ТПЕР кодограммы данных.
Полностью сформированная в ЦВК 2 кодограмма данных сообщения из аппаратуры передачи данных (АПД) 3, обеспечивающей передачу группового сигнала, передающей части отправляется по одному из каналов связи и поступает в АПД 3 принимающей части АСУ контролируемого объекта (см. фиг.2). В процессе передачи данных значения разрядов кодов сформированной в передающей части АСУ кодограммы данных вместе с кодом высокоточного времени неизменны.
Полученная кодограмма данных из АПД 3 поступает в ЦВК 2 принимающей части АСУ контролируемого объекта. После декодирования в ЦВК 2 разряды кодограммы данных с кодом высокоточного времени полученного сообщения считываются в ЦВК 2 принимающей части АСУ.
ЦВК 2 принимающей части АСУ, фиксируя текущее значение кода высокоточного времени, синхронизированного с источником полученной кодограммы данных, передающей части АСУ, проводит вычисление разницы между временем отправки и временем получения сообщения, учитывая, таким образом, полную величину задержки прохождения данных по тракту их передачи. Вычисляемое в ЦВК 2 принимающей части АСУ результирующее значение полной величины задержки ТРЕЗ кодограммы данных однозначно указывает на суммарную величину задержки, которая включает как постоянную, так и случайные составляющие задержки передачи кодограммы данных сообщения по тракту передачи данных.
Результирующее значение задержки ТРЕЗ передачи данных используется для экстраполяции положения контролируемого объекта с учетом скорости и направления его движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| Устройство для моделирования тракта передачи данных | 1980 |
|
SU926665A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КАНАЛОВ ПЕРЕДАЧИ ДАННЫХ | 2014 |
|
RU2598807C2 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КАНАЛОВ ПЕРЕДАЧИ ДАННЫХ В АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ РЕАЛЬНОГО МАСШТАБА ВРЕМЕНИ | 2018 |
|
RU2700551C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ГОСУДАРСТВЕННОГО РЕГИСТРА НАСЕЛЕНИЯ | 2004 |
|
RU2280280C1 |
| Устройство передачи и приема информации | 1987 |
|
SU1453605A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
Изобретение относится к области обработки цифровых данных и заключается в использовании в составе кодовой комбинации кодограммы передаваемых данных разрядов кода времени. Техническим результатом изобретения является возможность точного учета составляющих как постоянной, так и случайной временной задержки передаваемых информационных данных по трактам в АСУ реального масштаба времени. В кодограмму в передающей части АСУ вписывают код высокоточного времени момента передачи ТПЕР кодограммы данных. В принимающей части АСУ фиксируют текущее значение кода высокоточного времени момента приема ТПРМ кодограммы данных и вычисляют результирующую величину задержки передачи данных ТРЕЗ. Результирующую величину задержки ТРЕЗ определяют как разница значения высокоточного времени при приеме ТПРМ и соответствующего ему значения при передаче данных ТПЕР. 2 ил.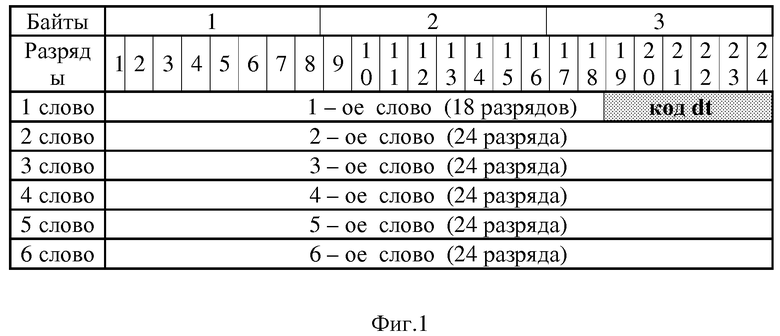
Способ борьбы с задержками передачи данных автоматизированной системы управления (АСУ) реального масштаба времени, заключающийся в использовании в составе кодовой комбинации кодограммы передаваемых данных разрядов кода времени, отличающийся тем, что в кодограмме данных в качестве кода времени используют код высокоточного времени, полученного от спутника связи, причем высокоточное время получают синхронизированным в передающей и принимающей частях АСУ, в передающей части АСУ вписывают в кодограмму данных текущее значение кода высокоточного времени при передаче данных ТПЕР, а в принимающей части АСУ фиксируют текущее значение кода высокоточного времени при приеме данных ТПРМ и вычисляют результирующую величину задержки передачи данных ТРЕЗ, определяемой как разница значения высокоточного времени при приеме и соответствующего ему значения при передаче данных ТРЕЗ = ТПРМ - ТПЕР, где ТПЕР – текущее значение кода высокоточного времени при передаче данных, ТПРМ – текущее значение кода высокоточного времени при приеме данных.
| НОВЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ В СИСТЕМАХ СВЯЗИ И УПРАВЛЕНИЯ | |||
| ТРУДЫ XI РОССИЙСКОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ | |||
| КАЛУГА, ИЗДАТЕЛЬСТВО ООО "НООСФЕРА", 2012 г., с.99-107 | |||
| ОБЩЕСИСТЕМНОЕ ПРОЕКТИРОВАНИЕ АСУ РЕАЛЬНОГО ВРЕМЕНИ | |||
| ПОД РЕД | |||
| ШАБАЛИНА В.А | |||
| МОСКВА, РАДИО И СВЯЗЬ, 1984, с.171, 178 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОДГОТОВКОЙ И ПУСКОМ РАКЕТ-НОСИТЕЛЕЙ | 2012 |
|
RU2491599C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ | 2004 |
|
RU2261470C1 |
| CN 2891495 Y, 18.04.2007. | |||

