Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена между подвижными объектами (ПО) и наземными комплексами (НК).
В настоящее время применяется система обмена сообщениями между бортовым радиоэлектронным оборудованием воздушных судов (ВС) и наземными службами ACARS, которая описана в документах ARINC-724. Она обеспечивает вызов на речевую связь и передачу данных. Бортовой комплекс связи для работы в системе ACARS, используемый на отечественных летательных аппаратах [1], решает следующие функциональные задачи:
- обмен сообщениями с наземным комплексом по MB (метровому) каналу в режимах свободного доступа и адресного опроса;
- обмен сообщениями с наземным комплексом по КВ (коротковолновому) каналу в режиме свободного доступа;
- обработку сообщений с целью передачи принятой информации экипажу;
- обработку принятых от бортовых систем и экипажа сообщений и передачу этой информации наземной службе;
- автоматизированное управление частотой радиостанции MB (метрового) диапазона по команде наземного комплекса и экипажа;
- автоматизированное управление режимами работы «прием-передача» радиостанции MB и ДКМВ диапазонов.
Бортовая система ACARS сопрягается с каналообразующей аппаратурой - радиостанциями MB и КВ диапазона и бортовыми системами в соответствии с ARINC-429.
Бортовой блок управления и связи представляет собой специализированный процессор. Основным каналом обмена текущей информации является MB канал. При полетах на трассах, не оборудованных MB связью (труднодоступные районы, тундра, горные массивы, океан), связь с воздушными судами осуществляется по КВ каналу.
Организацию обмена информацией между наземными службами и бортовыми системами осуществляет наземный комплекс, он опрашивает воздушные объекты (ВО), находящиеся в зоне его обслуживания, и собирает с них необходимую информацию. Бортовая система работает в этом случае в режиме адресного опроса. Для того чтобы бортовая система могла работать в режиме адресного опроса, ей необходимо встать на обслуживание в наземной системе. Для этого в бортовой системе предусмотрен режим прямого доступа. Кроме этих двух режимов, предусмотрена возможность работы в режиме телефонной связи по каналу передачи данных [2, 3].
К недостаткам представленной системы обмена сообщениями между бортовым радиоэлектронным оборудованием ПО и наземными службами, следует отнести невозможность управления ПО, находящимися за пределами радиогоризонта НК, который определяется границами оптической видимости. КВ каналы редко используются для управления полетом ПО из-за плохого качества принимаемых сообщений и наличия «мертвой» зоны для обеспечения связи, простирающейся до 500 км.
Известна система радиосвязи с подвижными объектами [4], состоящая из наземной и бортовой приемопередающих радиостанций, между которыми осуществляется обмен данными в соответствии с заложенными алгоритмами.
При обмене сообщениями между наземной приемопередающей станцией и воздушными объектами загрузка канала меняется в зависимости от этапа полета и информационной активности абонентов цифровой радиосвязи. Реализованный с помощью специализированного вычислителя автоматизированного рабочего места (АРМ) диспетчера управления воздушным движением (УВД) счетчик числа воздушных объектов контролирует количество объектов и выдает это число на счетчик загрузки системы. В зависимости от числа объектов и числа переспросов сообщений в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи. Для избежания столкновений при одновременной передаче несколькими объектами сообщений осуществляется контроль несущей во время воздействия на бортовой приемник. Определяется состояние, когда радиоканал свободен. Для разнесения во времени моментов выхода на связь нескольких воздушных объектов в бортовое устройство введен специализированный вычислитель, реализующий функции анализатора несущей частоты и генератора псевдослучайной задержки, которые обеспечивают соответствующую задержку на передачу сообщений от воздушных объектов. Информация о взаимном местоположении аэропорта и воздушного объекта для принятия оптимального решения на борту и в службах УВД снимается с бортовых и наземных датчиков - приемников данных глобальной навигационной системы.
Для качественного управления в системе предусмотрено использование режима ретрансляции с помощью одного или нескольких ПО, находящихся друг от друга в пределах прямой видимости, что увеличивает дальность связи НК с ПО, находящимися как в воздухе, так и на земле. Вместе с тем высокая динамика изменения воздушной обстановки накладывает дополнительные требования по управлению сетью воздушной связи, поскольку имеет место постоянное изменение дальности между взаимодействующими ПО. Поэтому возникает необходимость решения задачи учета быстроменяющегося пространственного положения взаимодействующих и часто уходящих за пределы радиогоризонта объектов. Эта задача не решается в аналоге, рассчитанном только на планомерное движение воздушных судов по известным трассам, и на стационарные наземные станции с каналами связи MB диапазона.
Наиболее близким по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [5], которая принята за прототип. Она состоит из наземного комплекса, содержащего наземное антенно-фидерное устройство с радиостанцией МВ-ДМВ диапазона, подключенной через аппаратуру передачи данных к специализированному вычислителю АРМ, второй вход которого подключен к приемнику спутниковых радионавигационных систем ГЛОНАСС/GPS, третий вход - к пульту управления АРМ, а выход - к монитору АРМ. В состав каждого из N воздушных объектов входят бортовые датчики, блок регистрации данных и приемник спутниковых радионавигационных систем ГЛОНАСС/GPS, соединенные с бортовым специализированным вычислителем соответственно, который через аппаратуру передачи данных, радиостанцию МВ-ДМВ диапазона подключен к антенне. Каждый из N воздушных объектов содержит анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, соединенные с двумя входами специализированного вычислителя, вход-выход которого подключен к двунаправленной шине системы управления воздушным объектом, а так же формирователь типа ретранслируемых сообщений, соединенный со специализированным вычислителем АРМ на базе ПЭВМ. Передача данных с НК обеспечивается по цепочке последовательно соединенных первого ВО, второго ВО и далее до N-го ВО, а передача данных с N-го ВО на НК осуществляется в обратном порядке.
К недостаткам прототипа следует отнести невозможность обмена данными с ВО при отсутствии или при недостаточном их количестве ВО-ретрансляторов или при нахождении ВО в «мертвой» зоне линии передачи данных КВ диапазона.
Основной технической проблемой, на решение которой направлено изобретение, является расширение зоны устойчивой связи, в том числе и за пределами радиогоризонта, за счет повышения энергетического потенциала линий передачи данных, увеличения высоты подъема антенн, использования процедур экстраполяции при подготовке сеанса связи, непрерывного обмена информацией о местоположении ПО и взаимодействующих с ними наземных комплексов, а также комплексирования и выбора более мощного из радиосигналов со спутникового канала связи и линии передачи данных ВЧ диапазона при нахождении ПО за пределами радиогоризонта. Зона устойчивой связи характеризуется областью, в которой обеспечивается прием радиосигналов с величиной отношения сигнал/шум больше требуемой или с менее требуемой вероятности ошибочного приема.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, обеспечивающую передачу данных в КВ диапазоне и состоящую из наземного комплекса, содержащего наземный специализированный вычислитель автоматизированного рабочего места, соответствующие входы которого подключены к наземному приемнику глобальных навигационных спутниковых систем и пульту управления АРМ, выход - к монитору АРМ, а соответствующие входы/выходы наземного специализированного вычислителя подключены к наземному формирователю типа ретранслируемых сообщений и первой наземной аппаратуре передачи данных (АПД), которая через наземную радиостанцию МВ-ДМВ диапазона, подключена к наземной антенне МВ-ДМВ диапазона, и N подвижных объектов, в состав каждого из которых входят бортовой специализированный вычислитель, соответствующие входы которого подключены к бортовым датчикам, бортовому приемнику глобальных навигационных спутниковых систем и бортовому формирователю типа ретранслируемых сообщений, выход - к блоку регистрации данных, а соответствующие входы/выходы бортового специализированного вычислителя подключены к анализатору типа принимаемых сообщений, двунаправленной шине системы управления подвижным объектом, к первой бортовой АПД, которая через бортовую радиостанцию МВ-ДМВ диапазона, подключена к соответствующей бортовой антенне, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, дополнительно введены на подвижном объекте подключенные двухсторонними связями к соответствующим входам/выходам наземного специализированного вычислителя наземный модуль оценки энергетического потенциала и прямой видимости, наземный модуль экстраполяции (расчета) местонахождения обслуживаемого ПО на момент сеанса связи, вторая наземная АПД, которая через наземную радиостанцию КВ диапазона подключена к наземной антенне КВ диапазона, третья наземная АПД, которая через наземную спутниковую радиостанцию подключена к наземной спутниковой антенне, а на каждом ПО дополнительно введены подключенные двухсторонними связями к соответствующим входам/выходам бортового специализированного вычислителя бортовой модуль оценки энергетического потенциала и прямой видимости, бортовой модуль экстраполяции (расчета) местонахождения обслуживаемого ПО на момент сеанса связи, вторая бортовая АПД, которая через бортовую радиостанцию КВ диапазона подключена к бортовой антенне КВ диапазона, третья бортовая АПД, которая через бортовую спутниковую радиостанцию подключена к бортовой спутниковой антенне, при этом система радиосвязи дополнительно обеспечивает передачу данных в диапазоне МВ-ДМВ и в спутниковом канале.
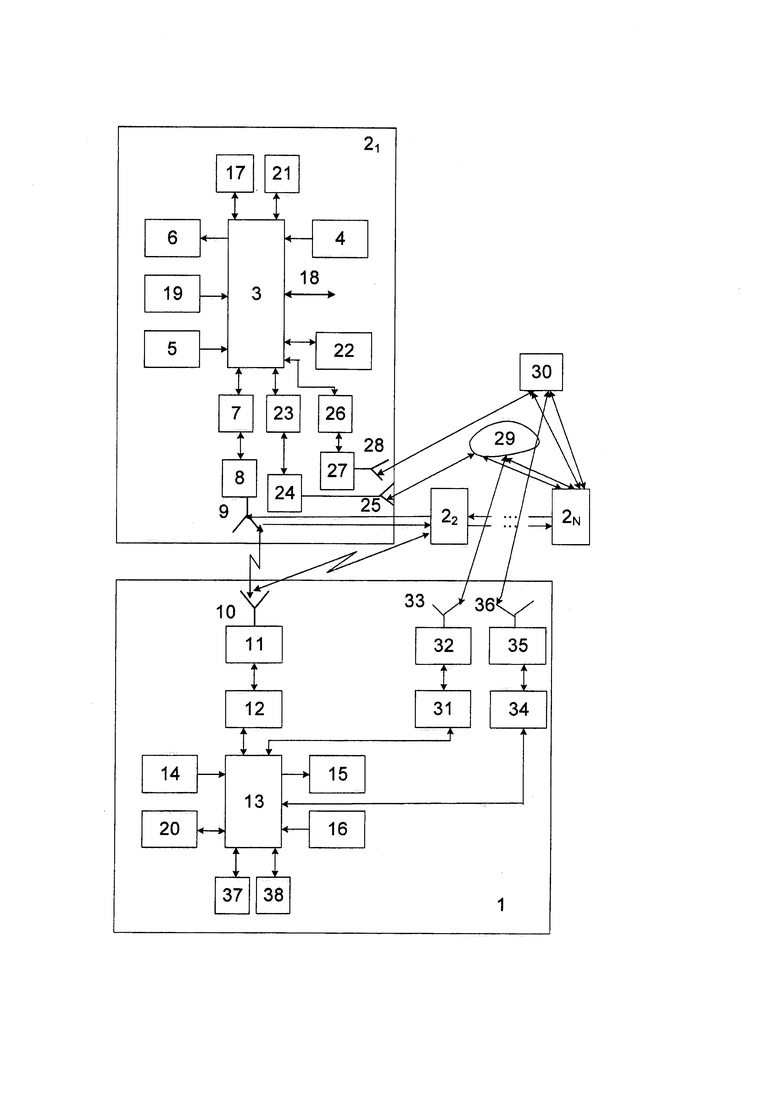
На фигуре представлена структурная схема системы радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - подвижный объект, например, воздушный;
3 - бортовой специализированный вычислитель;
4 - бортовые датчики;
5 - бортовой приемник глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS;
6 - блок регистрации данных;
7 - первая бортовая аппаратура передачи данных;
8 - бортовая радиостанция МВ-ДМВ диапазона;
9 - бортовая антенна МВ-ДМВ диапазона;
10 - наземная антенна МВ-ДМВ диапазона;
11 - наземная радиостанция МВ-ДМВ диапазона;
12 - первая наземная аппаратура передачи данных;
13 - специализированный вычислитель автоматизированного рабочего места, например, на базе ПЭВМ;
14 - наземный приемник глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS;
15 - монитор АРМ;
16 - пульт управления АРМ;
17 - анализатор типа принимаемых сообщений;
18 - двунаправленная шина системы управления подвижным объектом;
19 - бортовой формирователь типа ретранслируемых сообщений;
20 - наземный формирователь типа ретранслируемых сообщений;
21 - бортовой модуль оценки энергетического потенциала и прямой видимости;
22 - бортовой модуль экстраполяции (расчета) местонахождения обслуживаемого ПО на момент сеанса связи;
23 - вторая бортовая аппаратура передачи данных;
24 - бортовая радиостанция КВ диапазона;
25 - бортовая антенна КВ диапазона;
26 - третья бортовая аппаратура передачи данных;
27 - бортовая спутниковая радиостанция;
28 - бортовая спутниковая антенна;
29 - ионосферный отражательный слой;
30 - спутник связи;
31 - вторая наземная аппаратура передачи данных;
32 - наземная радиостанция КВ диапазона;
33 - наземная антенна КВ диапазона
34 - третья наземная аппаратура передачи данных;
35 - наземная спутниковая радиостанция;
36 - наземная спутниковая антенна;
37 - наземный модуль оценки энергетического потенциала и прямой видимости;
38 - наземный модуль экстраполяции (расчета) местонахождения обслуживаемого ПО на момент сеанса связи.
Сущность работы системы заключается в обеспечении ее адаптации к постоянно изменяющейся обстановке, взаимного положения НК и подвижных объектов относительно друг друга. Эта задача решается путем осуществления процедур обмена данными между объектами системы, способных обеспечить устойчивую связь (с требуемой вероятностью ошибочного приема) в зоне прямой видимости и за ее пределами, сопровождения подвижного объекта методом экстраполяции при выходе ПО из зоны прямой видимости в условиях постоянно изменяющейся дальности между взаимодействующими объектами, оценки величины отношения сигнал/шум в каналах, в которых предусматривается сеанс связи.
Система радиосвязи с подвижными объектами работает следующим образом. Во время движения подвижные объекты, находящиеся в пределах радиогоризонта и, если позволяет энергетический потенциал [3], обмениваются данными с наземным комплексом 1 в МВ-ДМВ диапазоне (узлы 2-13). Энергетический потенциал каждого канала системы, характеризуемый отношением сигнал/шум, зависит от мощности передатчика бортового комплекса связи и коэффициента усиления бортовой передающей антенны радиостанции соответственно, эффективной площади приемной антенны на НК, длины волны, коэффициента усиления приемной антенны выбранного для связи ПО, если бы она использовалась и в качестве передающей, дальности связи, шумовых характеристик и эффективной полосы пропускания приемной части, коэффициента, характеризующего потери полезного сигнала в антенно-фидерных трактах ПО от выхода передатчика до входа приемника, а также от параметров устройств помехоустойчивого кодирования, перемежения, формирования и взаимокорреляционной обработки ортогональных кодов [6].
Принимаемые наземной радиостанцией 11 МВ-ДМВ диапазона из канала "воздух-земля" сообщения через первую аппаратуру передачи данных 12 поступают в наземный специализированный вычислитель 13 АРМ, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в памяти наземного специализированного вычислителя 13 АРМ. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО 2i и состоянии его датчиков выводится на экран монитора 15 АРМ. В наземном специализированном вычислителе 13 АРМ решается задача обеспечения постоянной устойчивой радиосвязи со всеми N ПО 2. При выходе за пределы радиогоризонта хотя бы одного из ПО 2 или приближении к границе зоны устойчивой радиосвязи, определяется программно один из ПО, который назначается ретранслятором сообщений, условно обозначенный на фигуре цифрой 21. При постоянном изменении дальности между взаимодействующими ПО 2 в качестве ретранслятора может быть определен любой из N ПО, местоположение которого оптимально по отношению к НК 1 и всем ПО 2, составляющих цепочку ретрансляторов для доставки информации до выбранного ПО.
В этом случае автоматически или оператором АРМ назначается ПО 21, который будет использоваться в качестве ретранслятора, и по анализу местоположения, энергетического потенциала канала связи определяемого параметрами узлов: 3, 7-13 или 3, 7-9 следующего ПО 2 при ретрансляции и параметров движения остальных ПО 2 определяются оптимальные пути доставки сообщений удаленному от НК 1 за радиогоризонт подвижному, например, воздушному объекту. Сообщение от НК 1 через последовательную цепочку, состоящую из (N-1) ПО 2, может быть доставлено N-му ПО 2N. Для этого на НК 1 в формирователе 20 типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладываются номер ПО 21, назначенного ретранслятором и адреса подвижных объектов 2i, обеспечивающих заданный трафик сообщения. Принятые в МВ-ДМВ диапазоне сообщения на ПО 2 в блоке 17 анализа типа принимаемых сообщений анализируются. Если сообщение предназначено для данного ПО 2, то после анализа решается вопрос о направлении данных по двунаправленной шине 18 на систему управления или в режиме ретрансляции - передаче их на соседний ПО 2i. Для исключения коллизий минимизируется число разрядов в передаваемом сообщении, и ретрансляция данных осуществляется последовательно во времени. Если после приема сообщения на него требуется ответ, то в бортовом формирователе 19 формируется ответное слово, которое транслируется на НК 1 по той же последовательной цепочке через ПО 2i, но только в обратном порядке. При передаче с НК 1 приоритетных сообщений в соответствии с принятыми в системе радиосвязи с подвижными объектами категориями срочности для ПО 2 в наземном формирователе 20 типа ретранслируемых сообщений в заголовке сообщения формируется код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранный ПО 2i с учетом времени время задержки в средствах обработки сигналов подвижного объекта на принятое сообщение. Принимаемая на ПО 2i, информация отображается на блоке 6 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов на фоне электронной карты местности, характеризующих поставленную задачу. В беспилотных ПО блок 6 регистрации данных может отсутствовать. В таких случаях данные по двунаправленной шине 18 поступают непосредственно на систему управления ПО, не показанную на фигуре.
Остальные менее приоритетные сообщения в соответствии с протоколом обмена находятся в очереди соответствующей категории срочности. В специализированных вычислителях 3 и 13 определяется время "старения" информации и, если сообщение в течение определенного промежутка времени не было передано в канал связи, то оно "стирается" и посылается запрос на повторную передачу сообщения.
В обычном режиме с НК 1, когда не требуется ретрансляция сигналов, в МВ-ДМВ диапазоне осуществляется адресный опрос ПО 2 путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) на наземном формирователе 20 сообщение отображается на мониторе 15 АРМ. На ПО 2 после прохождения радиосигнала через антенну 9, радиостанцию 8, аппаратуру передачи данных 7 он поступает в бортовой специализированный вычислитель 3, где происходит идентификация принятого в сообщении адреса с адресом подвижного объекта, хранящимся в дешифраторе адреса. Далее сообщение передается в анализатор 17 типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ПО 2. Информационная часть сообщения записывается в память бортового специализированного вычислителя 3 и при необходимости выводится на экран блока 6 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
В зависимости от числа подвижных объектов и числа переспросов сообщений в канале радиосвязи в системе используются динамические алгоритмы организации обмена сообщениями и управления каналами радиосвязи ПО 2. При использовании определенного формата заголовка сообщения с выхода бортовых формирователей 19 типа ретранслируемых сообщений может быть использован режим свободного доступа со стороны подвижных объектов 2 или режим с выделением временного интервала при организации системы обмена данными с наземного комплекса 1.
В результате анализа состояния и загрузки каналов радиосвязи в системе с подвижными объектами в НК 1 определяется число столкновений сообщений в канале радиосвязи, и когда это число превышает предельно допустимое, система переходит в режим адресного опроса для упорядочения работы канала передачи данных "воздух-земля". Для того, чтобы избежать столкновений при одновременной передаче несколькими объектами сообщений, в специализированных вычислителях 3 и 13 осуществляется контроль несущей за время воздействия на бортовую радиостанцию заголовка (служебной части сообщений), и подготовленное сообщение передается только в том случае, когда радиоканал свободен. Для того, чтобы разнести по времени моменты выхода на связь подвижных объектов в то время, когда они обнаружили, что радиоканал свободен, в специализированных вычислителях 3 и 13 анализируется несущая частота и формируется псевдослучайная задержка передачи сообщений от подвижных объектов.
В режиме адресного опроса инициатором связи может быть только НК 1. Предусмотрена возможность оперативной передачи по цифровому каналу радиосвязи аварийных (экстренных) сообщений от подвижных объектов 2. Если ПО 2 сформировали для передачи сообщения и обнаружили, что радиоканал свободен, то они информируют остальные ПО 2 о начале цикла передачи данных, в том числе о своем местоположении, и случайным образом в выделенных им временных слотах распределяют передаваемые сообщения. Каждый из ПО 2, используя сигнал несущей в радиоканале и импульсы синхронизации, подсчитывает в специализированном вычислителе 3 сумму периодов передачи и свободных периодов очередности (равным одному временному окну (слоту)). При совпадении этой суммы со значением установленной очередности ПО 2 начинает передачу собственного пакета в выделенном интервале времени.
Введенные в НК 1 и ПО 2 соответственно формирователи 20 и 19 типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми (формализованными) данными по каналу "оператор-пилот" взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке 3 регистрации данных ПО 2 и мониторе 15 АРМ НК 1 соответственно.
Сообщения с выходов приемников 5 и 14 глобальных навигационных спутниковых систем ежесекундно записываются в память специализированных вычислителей 3 и 13 с привязкой к глобальному времени и синхронизируются. В специализированных вычислителях 3 и 13 эти данные используются для расчета навигационных характеристик и параметров движения каждого ПО. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 2 в специализированном вычислителе 3 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 2. Принятые на НК 1 навигационные сообщения от всех ПО 2 системы обрабатываются в специализированном вычислителе 13 и на фоне электронной карты местности выводятся на экран монитора 15 АРМ. ПО 2, находящиеся вблизи зон устойчивой радиосвязи выделяются от остальных, например, цветом на экране монитора 15 АРМ, и для них в специализированных вычислителях 3 и 13 начинается решение задачи выбора оптимального пути трансляции управляющих сообщений от НК 1, так как постоянно в специализированном вычислителе 13 оцениваются зоны устойчивой радиосвязи для НК 1 и всех ПО 2. Наличие приемника 14 глобальных навигационных спутниковых систем позволяет проводить управление ПО 2 с мобильного НК 1. В аппаратуре передачи данных 7 и 12 осуществляются операции: модуляции и демодуляции, кодирования и декодирования и другие.
При выходе ПО 2 из зоны устойчивой связи или за пределы прямой видимости, а также при отсутствии ПО-ретрансляторов или их недостаточном количестве, в узлах 21 и 37 формируется команда вычислителям 3 и 13 о переходе на работу по спутниковому каналу связи (узлы 3, 26, 27, 28, спутник 30, узлы 36, 35, 34, 13). На основании известных данных местонахождения и параметров движения в узлах 21 и 37 формируется команда соответствующим модулям 22 и 38 о начале формирования стробов сопровождения (процедуры экстраполяции [7]) выбранным для связи ПО 2. После того, как дальность связи между объектами, выбранными для связи, будет более 500 км, т.е. объект вышел из «мертвой» зоны КВ диапазона, то узлами 21, 22, 23, 24, 25, через ионосферный отражающий слой 29 и узлы 33, 32, 31, 37, 38 совместно с вычислителями 3 и 13 осуществляется переход на более дешевый канал КВ диапазона.
В процессе движения ПО 2 радиостанциями 8, 11, 24, 27, 32 и 35 постоянно осуществляется мониторинг радиочастотного спектра на наличие радиосигналов от объектов системы на заранее известных частотах с помощью команд с вычислителей 3 и 13. Приоритет отдается обмену данными в МВ-ДМВ диапазоне, затем следует канал КВ диапазона и далее спутниковый канал. В малонаселенных районах, где радиосеть МВ-ДМВ диапазона слабо развита, в основном, используется канал КВ диапазона и в некоторых случаях, например, когда область отражения радиоволн КВ диапазона находится в зоне главного ионосферного провала, переходят на спутниковый канал.
Повышение энергетического потенциала линий передачи данных может быть осуществлено за счет улучшения характеристик передатчиков и приемников радиостанций 8, 24, 27, 11, 32, 35, направленности антенн 9, 25, 28, 10, 33, 36, введения в АПД 7, 34, 12, 31, 34 процедур помехоустойчивого кодирования и перемежения и других [3].
Расширение зоны устойчивой связи (дальности прямой видимости) в МВ-ДМВ диапазоне может быть осуществлено за счет увеличения высоты подъема антенны 9 ПО и наземной антенны 10, а также использования процедур экстраполяции при подготовке сеанса связи, комплексирования и выбора более мощного из радиосигналов с спутникового канала связи и линии передачи данных КВ диапазона при нахождении ПО за пределами радиогоризонта [3].
Использование заявляемой системы радиосвязи позволяет расширить зону устойчивой связи по сравнению с аналогами и прототипом за счет:
- обмена точными данными о местоположении НК и ПО, находящихся даже за пределами радиогоризонта, что позволяет с помощью метода экстраполяции оптимально спланировать маршрут движения и соответствующий план связи, сократить потери топлива, избежать аварийной ситуации и выполнить поставленную задачу;
- непрерывного мониторинга наличия радиосигналов трех диапазонов и сравнения в них величины отношения сигнал/шум с требуемой, что позволяет обеспечить беспровальное сопровождение ПО по трассе;
- использования радиосигналов трех диапазонов, что позволяет повысить помехоустойчивость системы.
Литература:
1. Автоматизированное управление движением авиационного транспорта / В.В. Бочкарев, Г.А. Крыжановский, Н.Н. Сухих; Под ред. Г.А. Крыжановского. - М.: Трансп., 1999. - 319 с.
2. АС №1401626, дата публикации 07.06.1988.
3. Системы и техника радиосвязи в авиации: учеб. пособие /А.В. Кейстович, А.В. Комяков - Нижний Новгород: НГТУ, 2012. - 226 с.
4. Патент РФ на полезную модель №2195774, дата публикации 27.12.2002 Бюл. №36.
5. Патент РФ на полезную модель №44907, дата публикации 27.03.2005 Бюл. №9 (прототип).
6. Патент РФ на изобретение №2720215, дата публикации 28.04.2020 Бюл. №13.
7. Автоматизация обработки, передачи и отображения радиолокационной информации. / Под общ. ред. В.Г. Корякова. - Москва: Сов. радио, 1975. - 303 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2673680C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2530015C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793150C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2643182C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535922C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена между подвижными объектами (ПО) и наземными комплексами. Техническим результатом является расширение зоны устойчивой связи, в том числе и за пределами радиогоризонта, за счет повышения энергетического потенциала линий передачи данных, увеличения высоты подъема антенн, использования процедур экстраполяции при подготовке сеанса связи, непрерывного обмена информацией о местоположении ПО и взаимодействующих с ними наземных комплексов, а также комплексирования и выбора более мощного из радиосигналов со спутникового канала связи и линии передачи данных ВЧ-диапазона при нахождении ПО за пределами радиогоризонта. Упомянутый технический результат достигается путем введения в систему радиосвязи бортовых и наземных модулей оценки энергетического потенциала и прямой видимости и модуля экстраполяции расчета местонахождения обслуживаемого ПО на момент сеанса связи. 1 ил.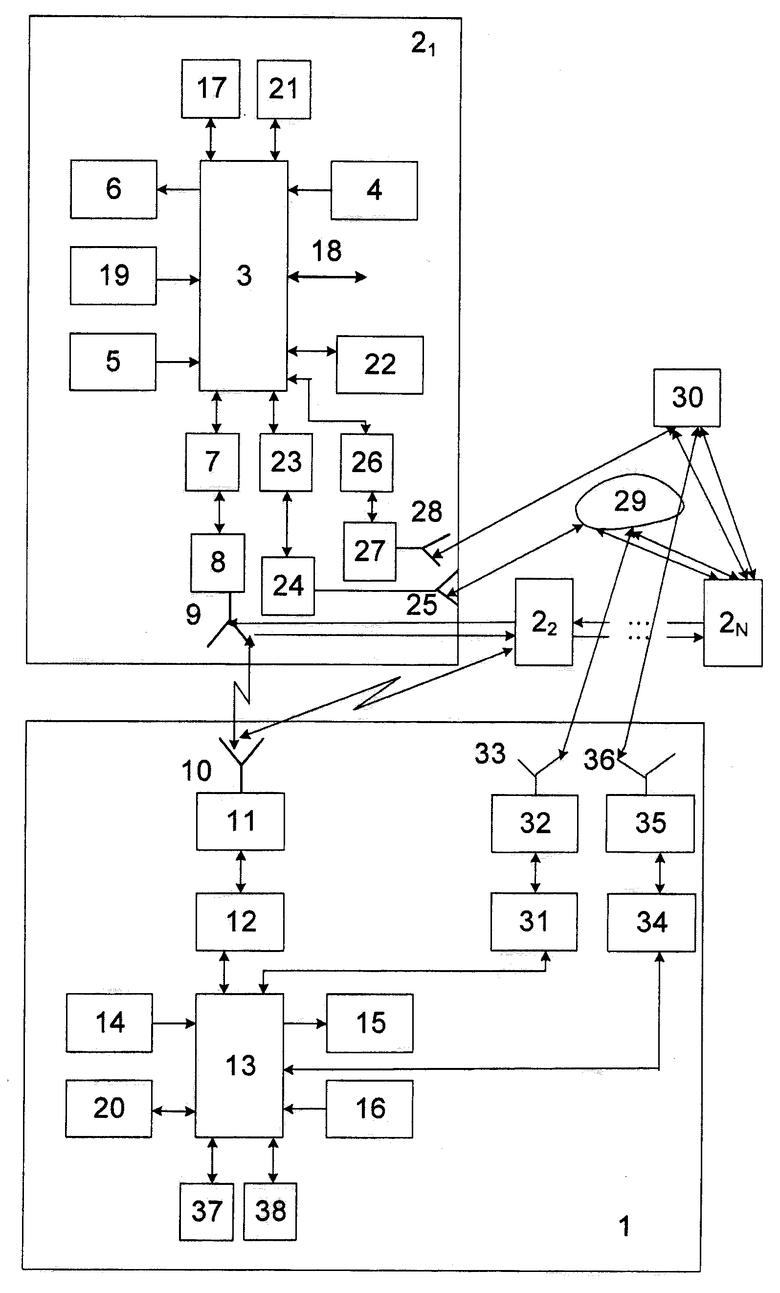
Система радиосвязи с подвижными объектами, обеспечивающая передачу данных в KB-диапазоне, состоящая из наземного комплекса (НК), содержащего наземный вычислитель автоматизированного рабочего места (АРМ), соответствующие входы которого подключены к наземному приемнику глобальных навигационных спутниковых систем и пульту управления АРМ, выход - к монитору АРМ, а соответствующие входы/выходы наземного вычислителя подключены к наземному формирователю типа ретранслируемых сообщений и первой наземной аппаратуре передачи данных (АПД), которая через наземную радиостанцию МВ-ДМВ-диапазона подключена к наземной антенне МВ-ДМВ-диапазона, и N подвижных объектов (ПО), в состав каждого из которых входят бортовой вычислитель, соответствующие входы которого подключены к бортовым датчикам, бортовому приемнику глобальных навигационных спутниковых систем и бортовому формирователю типа ретранслируемых сообщений, выход - к блоку регистрации данных, а соответствующие входы/выходы бортового вычислителя подключены к анализатору типа принимаемых сообщений, двунаправленной шине системы управления подвижным объектом, к первой бортовой АПД, которая через бортовую радиостанцию МВ-ДМВ-диапазона подключена к соответствующей бортовой антенне, причем передача данных с НК обеспечивается по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передача данных с N-го ПО на НК осуществляется в обратном порядке, отличающаяся тем, что в состав системы дополнительно введены на подвижном объекте подключенные двухсторонними связями к соответствующим входам/выходам наземного вычислителя наземный модуль оценки энергетического потенциала и прямой видимости, наземный модуль экстраполяции местонахождения обслуживаемого ПО на момент сеанса связи, вторая наземная АПД, которая через наземную радиостанцию KB-диапазона подключена к наземной антенне KB-диапазона, третья наземная АПД, которая через наземную спутниковую радиостанцию подключена к наземной спутниковой антенне, а на каждом ПО дополнительно введены подключенные двухсторонними связями к соответствующим входам/выходам бортового вычислителя бортовой модуль оценки энергетического потенциала и прямой видимости, бортовой модуль экстраполяции местонахождения обслуживаемого ПО на момент сеанса связи, вторая бортовая АПД, которая через бортовую радиостанцию KB-диапазона подключена к бортовой антенне KB-диапазона, третья бортовая АПД, которая через бортовую спутниковую радиостанцию подключена к бортовой спутниковой антенне, при этом система радиосвязи дополнительно обеспечивает передачу данных в диапазоне МВ-ДМВ и в спутниковом канале.
| Щетка | 1934 |
|
SU44907A1 |
| СИСТЕМА РАДИОСВЯЗИ С ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2017 |
|
RU2642490C1 |
| Управляемый полупроводниковый выпрямитель | 1955 |
|
SU106062A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СИСТЕМА СВЯЗИ С РЕТРАНСЛЯТОРАМИ, ИЗМЕНЯЮЩИМИ СВОЕ МЕСТОПОЛОЖЕНИЕ В ПРОСТРАНСТВЕ | 2007 |
|
RU2352067C1 |
| KR 101089370 B1, 02.12.2011. | |||

