Изобретение относится к лазерной технике и может быть использовано при стабилизации частоты излучения существующих и новых, которые только будут созданы, высокостабильных по частоте лазеров, которые, в свою очередь, могут применяться в квантовой метрологии, спектроскопии, системах навигации, локации и других областях.
Известен способ активной стабилизации частоты лазера по экстремуму линии-репера - резонансу мощности излучения в лазере и устройство для его реализации [Патент РФ №2352038], включающий формирование резонанса мощности излучения в резонаторе лазера, измерение сигнала, пропорционального выходной мощности излучения лазера, модуляцию резонатора лазера пробным сигналом, пропорциональным флуктуациям частоты излучения лазера, определение знака текущего градиента резонанса мощности излучения по сигналу, пропорциональному выходной мощности излучения лазера и названному пробному сигналу, и формирование на каждом шаге подстройки сигнала подстройки резонатора лазера, совпадающего со знаком текущего градиента, на экстремум резонанса мощности излучения лазера, причем амплитуда сигнала подстройки на каждом шаге подстройки переменна и пропорциональна текущей величине модуля коэффициента асимметрии - нормированному третьему центральному моменту функции плотности распределения сигнала выходной мощности излучения лазера.
Этот способ не дает требуемого уровня стабильности, поскольку при его реализации он не обеспечивает высокую скорость настройки на экстремум линии-репера. Это означает, что уровень стабильности частоты лазерного излучения недостаточно высок из-за времени подстройки - скорости сходимости алгоритма настройки в область экстремума линии-репера, так как подстройка ведется во всем широкополосном спектре возмущений, а полезными для подстройки компонентами спектра - "полезным шумом" - являются только те, которые сильно связаны (коррелированны) с сигналом, пропорциональным выходной мощности излучения лазера. Кроме того, способ не обеспечивает высокое отношение уровня "полезного шума" к уровню общего широкополосного шума.
Известен также способ стабилизации частоты излучения лазера [Патент РФ №2266595], согласно которому формируют резонанс мощности излучения в резонаторе лазера, измеряют сигнал, пропорциональный выходной мощности излучения лазера, модулируют резонатор лазера пробным сигналом, пропорциональным флуктуациям частоты излучения лазера, определяют знак текущего градиента резонанса мощности излучения по сигналу, пропорциональному выходной мощности излучения лазера и названному пробному сигналу, и на каждом шаге подстройки формируют сигнал подстройки резонатора лазера на экстремум резонанса мощности излучения лазера, совпадающий со знаком текущего градиента, при этом амплитуда сигнала подстройки на каждом шаге подстройки переменна и пропорциональна текущей величине модуля коэффициента асимметрии - нормированному третьему центральному моменту функции плотности распределения сигнала выходной мощности излучения лазера, причем сигнал, пропорциональный флуктуациям частоты излучения лазера, пропускают через полосовой фильтр, центральная частота которого обратно пропорциональна значению временного аргумента максимума взаимной корреляционной функции между сигналом выходной мощности излучения лазера и сигналом, пропорциональным флуктуациям частоты излучения лазера. Этот способ реализуется стабилизированным по частоте лазером [Патент РФ №2266595], включающим резонатор, снабженный пьезокорректором и пьезодатчиком, фотоприемник, детектирующий мощность излучения лазера, первый усилитель, усиливающий сигнал мощности излучения лазера, выходящий из фотоприемника, определитель знака градиента выходной мощности излучения, высоковольтный усилитель, вход которого соединен с выходом определителя знака градиента, а выход - с первым пьезокорректором, а также содержащим второй усилитель, усиливающий сигнал, пропорциональный флуктуациям частоты излучения лазера, при этом выход первого усилителя соединен с первым входом определителя знака градиента, а выход второго усилителя соединен со вторым входом определителя знака градиента, а пьезодатчик соединен с входом второго усилителя. Вышеуказанные способ стабилизации частоты излучения лазера и стабилизированный по частоте лазер приняты за прототип изобретения.
Недостатком прототипа является то, что он не обеспечивает высокую скорость настройки на экстремум линии-репера, т.е. уровень стабильности частоты лазерного излучения недостаточно высок из-за времени подстройки - скорости сходимости алгоритма настройки в область экстремума линии-репера. Хотя подстройка ведется во всем широкополосном спектре возмущений, полезными для подстройки компонентами спектра - "полезным шумом" - являются только те, которые сильно связаны (коррелированны) с сигналом, пропорциональным выходной мощности излучения лазера. Однако в прототипе для подстройки используется только одна часть спектра "полезного шума", определяемого глобальным максимумом взаимной корреляционной функции между сигналом выходной мощности излучения лазера и сигналом, пропорциональным флуктуациям частоты излучения лазера. Другие полезные части спектра, как правило, связанные с другими источниками возмущений и формирующие локальные максимумы взаимной корреляционной функции, в нем не используются, что и замедляет процесс подстройки резонатора на экстремум линии-репера.
Вместе с тем, для обеспечения быстрой сходимости в область экстремума линии-репера и высокой точности настройки на экстремум, необходимо выявлять через локальные максимумы взаимной корреляционной функции остальные полезные части спектра возмущений и использовать их для управления настройкой на экстремум линии-репера. При этом для определения градиента сигнала подстройки могут использоваться все, коррелированные с сигналом, пропорциональным выходной мощности излучения лазера, части спектра возмущений. Так как сигнал возмущений носит стохастический характер, то учет дополнительных каналов для стабилизации частоты существенно повышает надежность и качество стабилизации частоты излучения лазера.
Изобретение решает задачу повышения стабильности частоты лазерного излучения за счет увеличения скорости настройки резонатора на экстремум линии-репера за счет многоканальной схемы подстройки.
Поставленная задача решается тем, что предлагается способ стабилизации частоты излучения лазера, в соответствии с которым формируют резонанс мощности излучения в резонаторе лазера, измеряют сигнал, пропорциональный выходной мощности излучения лазера, модулируют резонатор лазера пробным сигналом, пропорциональным флуктуациям частоты излучения лазера, определяют знак текущего градиента резонанса мощности излучения по сигналу, пропорциональному выходной мощности излучения лазера и названному пробному сигналу, и на каждом шаге подстройки формируют сигнал подстройки резонатора лазера, совпадающий со знаком текущего градиента, на экстремум резонанса мощности излучения лазера, при этом амплитуда сигнала подстройки на каждом шаге подстройки переменна и пропорциональна текущей величине модуля коэффициента асимметрии - нормированному третьему центральному моменту функции плотности распределения сигнала выходной мощности излучения лазера, причем сигнал, пропорциональный флуктуациям частоты излучения лазера, пропускают через набор полосовых фильтров, соответствующие центральные частоты которых обратно пропорциональны значениям временных аргументов локальных, включая глобальный, максимумов взаимной корреляционной функции между сигналом выходной мощности излучения лазера и сигналом, пропорциональным флуктуациям частоты излучения лазера, сигналы с выходов полосовых фильтров суммируют и используют для определения амплитуды и знака сигнала подстройки.
Поставленная задача решается также тем, что предлагается стабилизированный по частоте излучения лазер, содержащий резонатор, образованный подвижным зеркалом, установленным на пьезокорректоре, и неподвижным зеркалом с установленным на нем пьезодатчиком, фотоприемник, сигнал с выхода которого подается на вход первого предварительного усилителя, пьезодатчик, сигнал с выхода которого подключен к входу второго предварительного усилителя, определитель знака градиента и амплитуды подстройки, выход которого подается на вход пьезокорректора через высоковольтный усилитель, кросс-коррелятор, причем выход первого предварительного усилителя подается на первые входы кросс-коррелятора и определителя знака градиента и амплитуды подстройки, выход второго предварительного усилителя подается на второй вход кросс-коррелятора, в который введен определитель локальных, включая глобальный, максимумов взаимной корреляционной функции и набор полосовых фильтров, причем выход кросс-коррелятора подается на вход определителя локальных, включая глобальный, максимумов взаимной корреляционной функции, выходы определителя связаны с первыми входами соответствующих полосовых фильтров, все вторые входы которых связаны с выходом второго предварительного усилителя, выходы полосовых фильтров подаются на входы сумматора, выход которого связан со вторым входом определителя знака градиента и амплитуды подстройки.
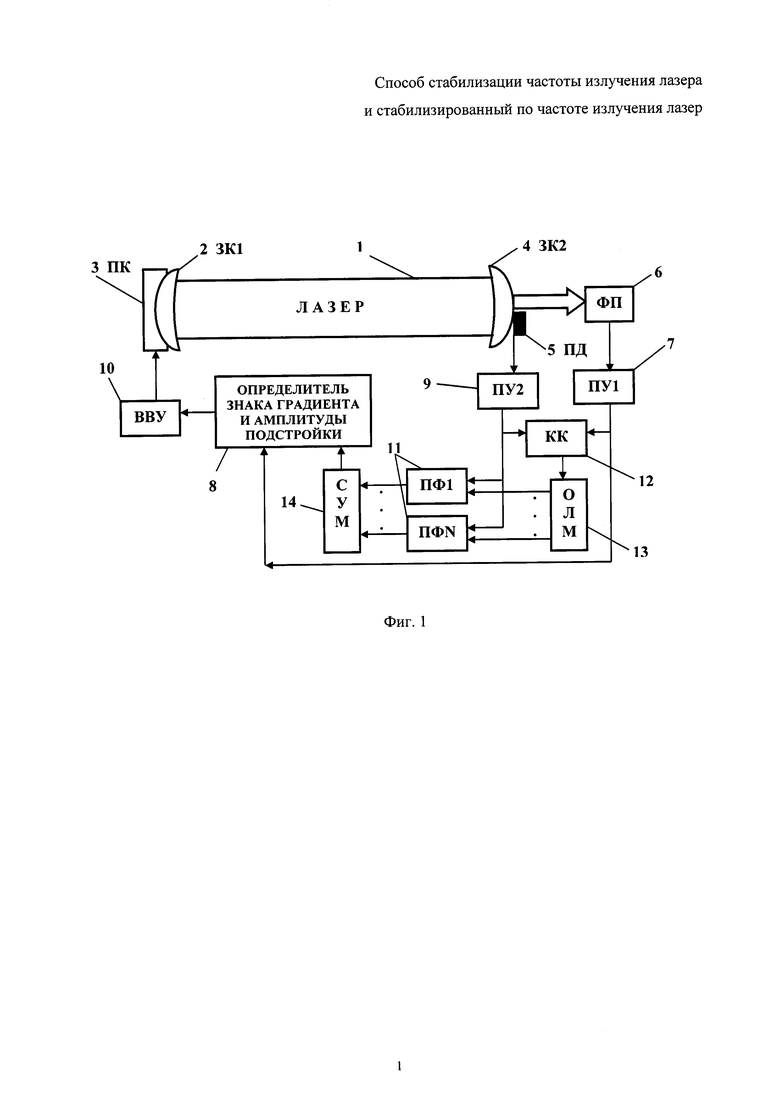
На фиг. 1 представлена функциональная схема стабилизированного по частоте лазера, реализующего предлагаемый способ, где:
1 - резонатор лазера,
2 - подвижное зеркало (на схеме обозначено как ЗК1),
3 - пьзокорректор (ПК),
4 - неподвижное зеркало (ЗК2),
5 - пьезодатчик (ПД),
6 - фотоприемник (ФП),
7 - первый предварительный усилитель (ПУ1),
8 - определитель знака градиента и амплитуды подстройки,
9 - второй предварительный усилитель (ПУ2),
10 - высоковольтный усилитель (ВВУ),
11 - полосовые фильтры (ПФ1 - ПФN),
12 - кросс-коррелятор (КК) между сигналами с выходов первого и второго предварительных усилителей,
13 - определитель локальных, включая глобальный, максимумов взаимной корреляционной функции (ОЛМ),
14 - сумматор (СУМ).
Лазер включает резонатор 1, образованный подвижным зеркалом 2, установленным на пьезокорректоре 3, и неподвижным зеркалом 4 с установленным на нем пьезодатчиком 5. Резонатор лазера содержит усиливающую среду и нелинейно поглощающую среду, формирующую узкую линию-репер. Излучение лазера регистрируется фотоприемником 6, сигнал с выхода которого, усиленный в первом предварительном усилителе 7, подается на первые входы определителя знака градиента и амплитуды подстройки 8 и кросс-коррелятора 12. Пьезодатчик 5 подключен к входу второго предварительного усилителя 9 и служит датчиком, регистрирующим пробный сигнал, возмущающий резонатор и пропорциональный флуктуациям частоты излучения лазера, который с выхода второго предварительного усилителя 9 подается на вторые входы кросс-коррелятора 12 и полосовых фильтров 11. Выход кросс-коррелятора 12 подается на вход определителя локальных, включая глобальный, максимумов взаимной корреляционной функции 13. Сигналы с выходов определителя 13 подаются на соответствующие первые входы полосовых фильтров 11. Выходы полосовых фильтров 11 связаны с соответствующими входами сумматора 14. Выход сумматора 14 подается на второй вход определителя знака градиента и амплитуды подстройки 8. Выход определителя знака градиента и амплитуды подстройки 8 через высоковольтный усилитель 10 связан с пьезокорректором 3.
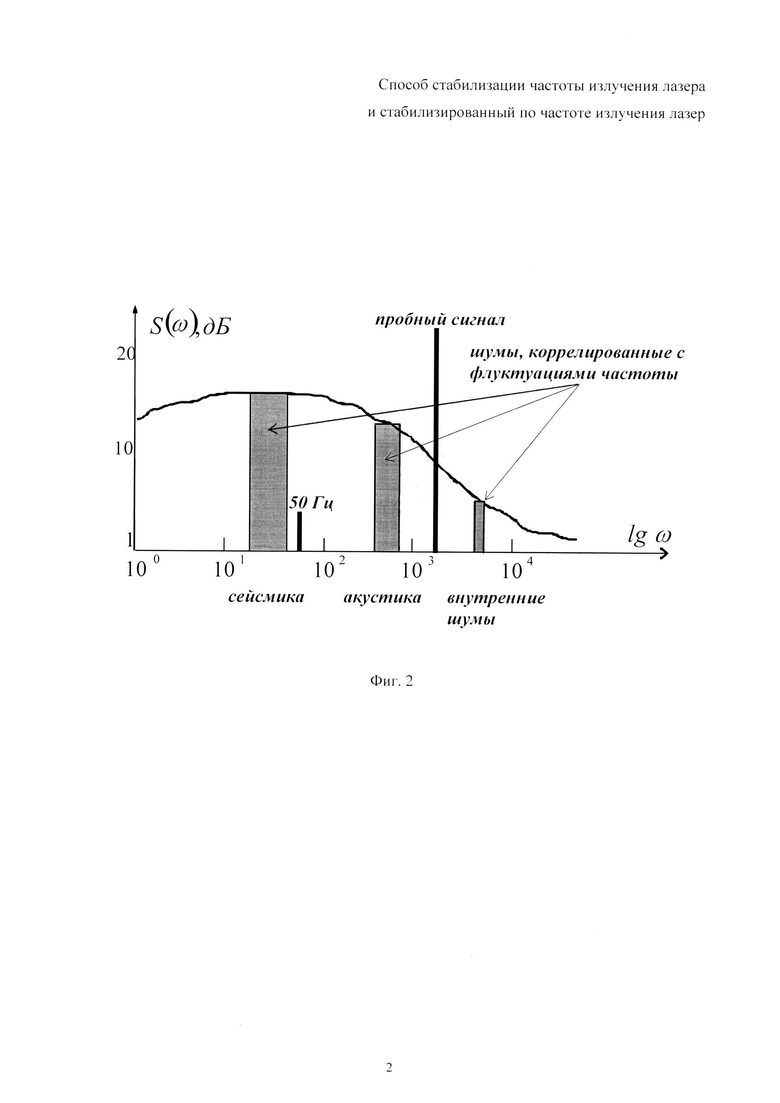
На фиг. 2 приведены спектры широкополосных возмущений лазера и характерные масштабы расположения по Фурье - частотной шкале шумов, регулярных помех (50 Гц) и классического пробного сигнала в известных схемах стабилизации частоты.
Предлагаемый способ реализуется с помощью заявляемого стабилизированного по частоте излучения лазера следующим образом.
Излучение на выходе резонатора лазера детектируется фотоприемником 6. Сигнал, пропорциональный выходной мощности излучения лазера, усиленный в первом предварительном усилителе 7, подается на первые входы определителя знака градиента и амплитуды подстройки 8 и кросс-коррелятора 12. На второй вход кросс-коррелятора 12 подается возмущающий резонатор сигнал, пропорциональный флуктуациям частоты лазера, снимаемый с пьезодатчика 5 и усиленный во втором предварительном усилителе 9, причем этот же сигнал, пропущенный через полосовые фильтры 11, подается через сумматор 14 на второй вход определителя знака градиента и амплитуды подстройки 8.
Резонатор со своими элементами - зеркалами, фиксирующей арматурой, пьезокорректорами - образует инерционную механическую систему, на которую действуют возмущения в инфранизком (сейсмическом), акустическом и других диапазонах частот (фиг. 2). В этом диапазоне (0.1-12000 Гц) сосредоточена основная спектральная мощность возмущений, в том числе акустических и микросейсмических полей, поэтому и в известных системах стабилизации частота пробного сигнала выбирается в этом диапазоне.
В соответствии с этим, на зеркало 4 с установленным на нем пьезодатчиком 5 действуют механические возмущения, вызывающие перемещение зеркала 4. Это приводит к появлению на пьезодатчике 5 (за счет пьезоэффекта) электрического сигнала, который пропорционален амплитуде перемещения зеркала 4, а следовательно, и к изменению частоты излучения лазера. Таким образом, возмущения, испытываемые всей лазерной системой, в т.ч. резонатором 1, преобразуются пьезодатчиком 5 в широкополосный электрический сигнал, несущий информацию о флуктуациях частоты.
В определителе знака градиента и амплитуды подстройки 8, который может быть реализован или в виде программы для ЭВМ, или аппаратно в микропроцессоре, по сигналам UПУ1 и UПУ2 определяется знак градиента Sign (∂UПУ1/∂UПУ2), а по сигналу UПУ1 - переменная амплитуда сигнала подстройки. Для определения величины амплитуды используется признак, по которому на вершине (экстремуме) линии-репера, в силу локальной симметрии линии, функция плотности распределения (гистограмма) сигнала UПУ1 выходной мощности излучения тоже симметрична. Значит, отклонение рабочей точки от искомой точки экстремума вызывает асимметрию гистограммы, и степень отклонения - коэффициент асимметрии - может служить мерой величины амплитуды сигнала управления. Эта адаптивная амплитуда будет тем больше, чем больше отклонение рабочей точки от точки экстремума. В области экстремума амплитуда сигнала управления очень мала и не возмущает резонатор, в отличие от стандартных схем стабилизации частоты с постоянным пробным сигналом. Как известно, этот нормированный коэффициент Ка равен:

где

- оценка третьего центрального момента на текущем дискретном интервале (n-m), n - текущий дискретный шаг, m - начальное значение интервала усреднения,

- оценка скользящего среднего значения сигнала UПУ1 на интервале (n-m),

- среднеквадратичное отклонение (дисперсия σ2, второй центральный момент) на этом текущем интервале.
Для исключения высокого уровня вычислительных шумов, всегда возникающих при определении градиента, используется только знак текущего градиента, с учетом которого на пьезокорректор 3 от высоковольтного усилителя 10 подается сигнал управления с переменной амплитудой в соответствии с формулой (1). Кроме того, для выделения "полезных шумов", коррелированных с сигналом выходной мощности излучения, и исключения тех, которые ухудшают отношение "полезный шум"/общий шум, сигнал, возмущающий резонатор, снимаемый с пьезодатчика 5 и усиленный во втором предварительном усилителе 9, пропускается через полосовые фильтры 11. Перестраиваемые центральные частоты этих полосовых фильтров устанавливаются сигналами с выхода определителя локальных, включая глобальный, максимумов взаимной корреляционной функции 13. Они обратно пропорциональны значениям временного аргумента соответствующего локального максимума взаимной корреляционной функции между сигналом выходной мощности излучения лазера и сигналом, пропорциональным флуктуациям частоты излучения лазера. При этом каждому номеру определяемого локального максимума соответствует свой полосовой фильтр, сигналы с выходов которых подаются на соответствующие входы сумматора 14. Сигнал с выхода сумматора подается на второй вход определителя знака градиента и амплитуды подстройки 8.
Сигнал управления Un на каждом дискретном шаге подстройки n определяется в определителе знака градиента и амплитуды подстройки 8 с помощью алгоритма итерационного типа

где в текущем режиме определяются знак и значение Кa по формулам (1), (2) и (4), а сигналу UПУ2 соответствует сумма сигналов с выходов полосовых фильтров 11.
Предлагаемый способ стабилизации частоты излучения лазера, основанный на использовании экстремума линии-репера, отличается от известных аналогов тем, что не требует дополнительного гармонического пробного сигнала с большой амплитудой девиации, а прямо использует в качестве пробного сигнал, возмущающий резонатор с высокой степенью корреляционной связи с сигналом выходной мощности излучения лазера, при этом формирование сигнала подстройки с переменной амплитудой приводит к повышению точности подстройки частоты лазера к экстремуму линии-репера и улучшению стабильности его частоты. Следует также отметить, что лазеры, реализующие описанный способ, по конструкции проще лазеров, реализующих иной способ стабилизации, а стабилизированы они более надежно. Переход от одноканальной схемы подстройки на экстремум резонанса, описанной в прототипе, к многоканальной схеме в предлагаемом способе и устройстве повышает стабильность частоты лазерного излучения за счет увеличения скорости настройки резонатора на экстремум линии-репера и надежность стабилизации частоты лазерного излучения за счет многоканальной схемы подстройки.
Способ стабилизации частоты излучения лазера включает в себя формирование резонанса мощности излучения в резонаторе лазера, измерение выходной мощности излучения лазера, модулирование резонатора лазера пробным сигналом, пропорциональным флуктуациям частоты излучения лазера. Далее определяют знак текущего градиента резонанса мощности излучения по сигналу, пропорциональному выходной мощности излучения лазера и названному пробному сигналу, на основании которого формируют сигнал подстройки. Амплитуда сигнала подстройки переменна и пропорциональна величине модуля нормированному третьему центральному моменту функции плотности распределения сигнала выходной мощности излучения лазера. Причём для определения амплитуды и знака сигнала подстройки используется набор полосовых фильтров. Технический результат заявленного решения заключается в повышении стабильности частоты лазерного излучения за счет увеличения скорости настройки резонатора на экстремум линии-репера за счет многоканальной схемы подстройки. 2 н.п. ф-лы, 2 ил.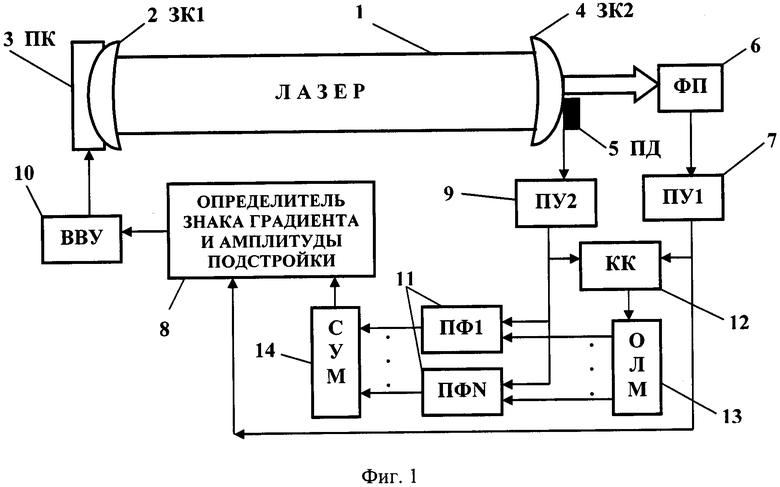
1. Способ стабилизации частоты излучения лазера, в соответствии с которым формируют резонанс мощности излучения в резонаторе лазера, измеряют сигнал, пропорциональный выходной мощности излучения лазера, модулируют резонатор лазера пробным сигналом, пропорциональным флуктуациям частоты излучения лазера, определяют знак текущего градиента резонанса мощности излучения по сигналу, пропорциональному выходной мощности излучения лазера и названному пробному сигналу, и на каждом шаге подстройки формируют сигнал подстройки резонатора лазера, совпадающий со знаком текущего градиента, на экстремум резонанса мощности излучения лазера, при этом амплитуда сигнала подстройки на каждом шаге подстройки переменна и пропорциональна текущей величине модуля коэффициента асимметрии - нормированному третьему центральному моменту функции плотности распределения сигнала выходной мощности излучения лазера, отличающийся тем, что сигнал, пропорциональный флуктуациям частоты излучения лазера, пропускают через набор полосовых фильтров, соответствующие центральные частоты которых обратно пропорциональны значениям временных аргументов локальных, включая глобальный, максимумов взаимной корреляционной функции между сигналом выходной мощности излучения лазера и сигналом, пропорциональным флуктуациям частоты излучения лазера, сигналы с выходов полосовых фильтров суммируют и используют для определения амплитуды и знака сигнала подстройки.
2. Стабилизированный по частоте излучения лазер, содержащий резонатор, образованный подвижным зеркалом, установленным на пьезокорректоре, и неподвижным зеркалом с установленным на нем пьезодатчиком, фотоприемник, сигнал с выхода которого подается на вход первого предварительного усилителя, пьезодатчик, сигнал с выхода которого подключен к входу второго предварительного усилителя, определитель знака градиента и амплитуды подстройки, выход которого подается на вход пьезокорректора через высоковольтный усилитель, кросс-коррелятор, причем выход первого предварительного усилителя подается на первые входы кросс-коррелятора и определителя знака градиента и амплитуды подстройки, выход второго предварительного усилителя подается на второй вход кросс-коррелятора, отличающийся тем, что он содержит определитель локальных, включая глобальный, максимумов взаимной корреляционной функции и набор полосовых фильтров, причем выход кросс-коррелятора подается на вход определителя локальных, включая глобальный, максимумов взаимной корреляционной функции, выходы определителя связаны с первыми входами соответствующих полосовых фильтров, все вторые входы которых связаны с выходом второго предварительного усилителя, выходы полосовых фильтров подаются на входы сумматора, выход которого связан со вторым входом определителя знака градиента и амплитуды подстройки.
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ИЗЛУЧЕНИЯ ЛАЗЕРА | 2009 |
|
RU2447557C2 |
| СТАБИЛИЗИРОВАННЫЙ ПО ЧАСТОТЕ ЛАЗЕР | 1993 |
|
RU2073949C1 |
| CN 103532002 A 22.01.2014 | |||
| US 6738408 B2 18.05.2004. | |||

