Настоящее изобретение относится к ходовой направляющей для эскалатора или траволатора.
Из уровня техники известны эскалаторы и траволаторы, которые имеют несущую конструкцию. На несущей конструкции между первой областью поворота и между второй областью поворота расположены ходовые направляющие.
Документ ЕР 1679280 А1 раскрывает, например, ходовую направляющую со сложным профилем, который может крепиться к балке. Ходовая направляющая образована цельной и имеет выступающим образом сформированную перегородку с направляющей боковой поверхностью, которая сбоку ведет ролики лестничного полотна эскалатора или ролики бесступенчатого полотна траволатора.
Документ ЕР 2050708 А2 раскрывает точно также ходовую направляющую для эскалаторов или траволаторов. И эта ходовая направляющая имеет сложный профиль, который располагает соответствующими выступами, чтобы сбоку вести ролики лестничного полотна эскалатора или ролики бесступенчатого полотна траволатора.
Изготовление таких ходовых направляющих с интегрированной направляющей боковой поверхностью является трудоемким и дорогим. Определенные границы в конструировании поставлены условиями изготовления. Кроме того, сформированные направляющие боковые поверхности имеют радиус на переходе к дорожке качения ходовой направляющей, по каковым дорожкам качения движутся ролики в направлении движения. Этот радиус может сильно повреждать край роликов или чрезмерно изнашивать.
Задачей изобретения является преодоление недостатков уровня техники. В частности, для эскалатора или траволатора должна в распоряжение предоставляться ходовая направляющая, изготовление которой недорого и которая позволяет щадящее ведение опорных роликов.
Эта задача решается с помощью устройств, охарактеризованных признаками независимых пунктов формулы изобретения. Другие формы осуществления следует из зависимых пунктов формулы изобретения.
Эскалатор со ступенчатым полотном или траволатор с бесступенчатым полотном имеет первую область поворота и вторую область поворота, причем бесступенчатое полотно, соответственно ступенчатое полотно, расположены с движением по замкнутой траектории между первой областью поворота и второй областью поворота. Дальше эскалатор или траволатор содержит, по меньшей мере, расположенную между областями поворота ходовую направляющую для ведения ступенчатого полотна или бесступенчатого полотна. Ходовая направляющая имеет, по меньшей мере, опорную поверхность с дорожкой качения для роликов ступенчатого полотна или бесступенчатого полотна. Дальше эскалатор или траволатор включает, по меньшей мере, направляющую планку с направляющей боковой поверхностью для бокового ведения этих роликов, причем ролики при ведении находятся в боковом контакте с направляющей боковой поверхностью. Направляющая планка является отдельным элементом конструкции и при установке благодаря этому может выбираться положение направляющей планки относительно ходовой направляющей.
Ходовой направляющей в настоящем описании называются все неподвижные части эскалатора, соответственно траволатора, которые служат опорой роликам ступенчатого полотна или бесступенчатого полотна между обеими областями поворота в отношении силы тяжести и по дорожкам качения которых катятся ролики или части, которые препятствуют отрыву роликов от дорожек качения. Таким образом, это могут быть ходовые направляющие, дорожки качения, контрнаправляющие и много тому подобное. В случае роликов речь идет, например, об опорных роликах или роликах цепи ступенчатого полотна или бесступенчатого полотна. Благодаря тому, что направляющая планка образована в виде отдельного элемента конструкции, она может легко изготавливаться, монтироваться и подгоняться.
Бесступенчатое полотно, соответственно ступенчатое полотно, обычно содержит большое количество площадок или ступеней, которые расположены между двумя роликовыми цепями. Ролики роликовых цепей опираются на ходовые направляющие и по прямой движутся обычно без проблем. При увеличивающемся пробеге шарниры цепи, валики цепи и подшипниковые втулки в роликовых цепях изнашиваются и это может приводить к отличающимся удлинениям между левой роликовой цепью и правой роликовой цепью. Этих минимальных различий достаточно, чтобы расположенные между роликовыми цепями площадки больше не располагались совершенно ортогонально к направлению движения и отсюда происходит движение боком. Это движение боком или движение под углом является причиной бокового усилия, которое может отклонять ролики от их теоретического направления движения. Так как ролики входят в контакт с направляющей планкой, когда наступает это движение боком, является важным, что ролики при ведении входят в прямой контакт с направляющей боковой поверхностью направляющей планки. Благодаря этому прямому контакту обслуживающий персонал без проблем может слышать и даже чувствовать, что ролики касаются направляющей боковой поверхности и ведутся с ее помощью. В этом случае обслуживающий персонал может направленно провести работы по текущему ремонту.
Благодаря разделению ходовой направляющей и направляющей планки для направляющей планки могут выбираться способы изготовления, которые отличаются от способа изготовления остальной ходовой направляющей. Кроме того, могут реализоваться варианты исполнения, которые при цельном изготовлении не могли осуществляться совсем или с только с большими затратами. В частности, такие направляющие планки не имеют никакого радиуса в переходной области между дорожкой качения и направляющей боковой поверхностью. Даже возможно, что направляющие планки образованы так, что направляющая боковая поверхность не полностью доходит до опорной поверхности, а, по меньшей мере, в области направляющей боковой поверхности между направляющей боковой поверхностью и опорной поверхностью соответственно дорожкой качения имеется расстояние. Дальше не имеется никаких ограничений в выборе материала для направляющих планок. Преимущественно такие направляющие планки изготавливаются из одного из следующих материалов или сплавов: сталь, стальные сплавы, алюминий, алюминиевые сплавы, латунь, бронза, сплавы бронзы, полимерные материалы, усиленные стекловолокном полимерные материалы и многие другие. Особенно предпочтительно применение полимерных материалов для изготовления направляющих планок, если их твердость меньше твердости роликов, так что при контакте наступает износ направляющей планки, а не ролика. Преимущество заключается в том, что направляющие планки могут заменяться существенно проще, чем ролики.
В специальных областях применения требования более высокого уровня могут вести к тому, что материал направляющей планки должен быть тверже материала ролика. Такими специальными областями применения могут быть экстра длинные эскалаторы и траволаторы, которые расположены, например, в метро, зданиях аэропортов или в условиях установки, труднодоступных для обслуживающего персонала.
Направляющая планка на ходовой направляющей может быть расположена участками. Например, возможно, что в направлении движения после направляющей планки ролики короткий участок едут по ходовой направляющей без ведения. Только после определенного расстояния следует, например, другая направляющая планка. Представляется, естественно, что при таком расположении участками направляющих планок получается дальнейшее сокращение затрат по сравнению с известной из ЕР 1679280 А1 ходовой направляющей с формированной, непрерывной направляющей боковой поверхностью. С помощью такого расположения участками может существенно уменьшаться точно также износ боковой кромки опорных роликов.
Направляющая планка может быть расположена на опорной поверхности рядом с собственной дорожкой качения роликов, соответственно ходовой направляющей. Например, возможно разъемное соединение или расположение. Благодаря прямому монтажу направляющей планки на опорной поверхности ходовой направляющей становится возможным уменьшение конструктивной высоты ходовой направляющей. Не задано никаких обусловленных изготовлением минимальных конструктивных высот. Благодаря разъемному положению направляющей планки в случае чрезмерного износа или при повреждении направляющую планку можно легко заменить.
Ходовая направляющая может иметь, по меньшей мере, другую опорную поверхность с дорожкой качения, которая расположена ниже первой опорной поверхности, причем дорожка качения, расположенная на первой опорной поверхности, предусмотрена для прямого хода роликов ступенчатого полотна или бесступенчатого полотна и другая дорожка качения для обратного хода роликов ступенчатого полотна или бесступенчатого полотна. Благодаря применению отдельного элемента конструкции в качестве направляющей планки является возможной разработка ходовой направляющей в виде простого U-профиля, соответственно С-профиля. Например, на верхней полке С-профиля находится дорожка качения для прямого хода, в то время как на нижней полке С-профиля расположена дорожка качения для обратного хода. Как на опорной поверхности для прямого хода, так и опорной поверхности для обратного хода могут быть расположены одна или несколько направляющих планок.
Направляющие планки для прямого хода роликов могут быть расположены в направлении движения со смещением к направляющим планкам обратного хода. С помощью смещенного расположения направляющих планок ходовая направляющая нагружается меньше боковыми усилиями, возникающими из-за не полностью ортогонально ориентированных к направлению движения движущихся ступеней или площадок.
Ходовая направляющая и/или направляющая планка могут иметь крепежные средства, которые выполнены таким образом, что является возможной боковая установка положения направляющей планки поперек к направлению движения роликов. Таким образом, увеличивается, например, полезный срок службы направляющей планки. Если, например, направляющая боковая поверхность изношена, направляющая планка может переместиться вбок или подрегулироваться, чтобы не допустить никакого чрезмерного зазора между направляющими планками и роликами ступени или площадки. Кроме того, это позволяет проводить более простой первичный монтаж ходовой направляющей. Боковой зазор может регулироваться на месте и таким образом в зависимости от установки.
Ходовая направляющая может иметь одну или несколько направляющих планок при прямом ходе и/или при обратном ходе. Таким образом, несмотря на ведение с помощью участков обеспечивается спокойное движение эскалатора или траволатора, так как боковое отклонение лестничного полотна или бесступенчатого полотна может своевременно определяться и корректироваться.
По меньшей мере, направляющая планка может иметь датчик для измерения соответственно регистрации боковых усилий, действующих на направляющую планку. Такой датчик может быть представлен, например, тензорезисторным мостом (DMS) или коммутационным устройством. Разумеется, возможны и другие варианты исполнения датчиков в виде радиолокационных датчиков, оптических датчиков всех типов, ультразвуковых датчиков, используемых в качестве датчиков GSM-модулей антенн, и многое другое. Применение датчиков позволяет, например, при чрезмерной нагрузке направляющей пластины сбрасывать предупредительное сообщение, и/или установка останавливается. Датчик может быть оборудован для регистрации ударяющихся об что-то роликах, соответственно для измерения боковых усилий, температуры, скорости или для измерения вибрации и колебаний. Разумеется, возможны и другие измерительные системы или датчики, которые могут фиксировать различные условия работы. По меньшей мере, направляющая планка, оборудованная сенсором, может смещаться сбоку к остальным направляющим планкам в направлении к дорожке качения роликов, то есть может быть расположена, выступая к остальным направляющим планкам в направлении роликов. Такая направляющая планка служит потом в первую очередь больше не только боковой направляющей соответственно боковому ведению роликов, а должна на раннем этапе замерять действующее боковое усилие. Эта направляющая планка с датчиком может применяться, таким образом, в качестве системы раннего определения латерального положения ступенчатого полотна в эскалаторе, соответственно бесступенчатого полотна в траволаторе.
Угол скоса кромок между направляющей боковой поверхностью и дорожкой качения может лежать между 90° и 140°, преимущественно между 90° и 135°, особенно предпочтительно между 90° и 125°.
Предложенная согласно изобретению направляющая планка для ходовой направляющей служит, как описано выше, для бокового ведения роликов, в частности, опорных роликов лестничного полотна или бесступенчатого полотна. Направляющая планка имеет направляющую боковую поверхность с углом скоса кромок и образована в виде отдельного от ходовой направляющей элемента конструкции. С помощью отдельного образования становится возможным, что направляющая планка и/или ходовая направляющая может особенно просто изготавливаться и монтироваться.
Направляющая планка это в основном продолговатый, простирающийся в направлении движения лестничного полотна или бесступенчатого полотна элемент конструкции. Так, например, направляющая планка может быть расположенным параллельно ходовой направляющей бруском трапециевидного, прямоугольного, квадратного или круглого поперечного сечения. Разумеется возможны и другие формы осуществления, например направляющих планок, изготовленных из фасонных прутков или фасонных труб.
Направляющая планка может иметь крепежное средство для крепления на ходовой направляющей. Преимущественно крепежные средства устроены таким образом, что направляющая планка при своей боковой установке может перемещаться поперек к направлению движения подлежащих ведению роликов. При этом речь идет, например, об образованном ортогонально к теоретическому направлению движения шлицевом отверстии, через которое с помощью винта направляющая планка может крепиться на ходовой направляющей соответственно на приданном ходовой направляющей крепежном средстве.
Направляющая боковая поверхность в, по меньшей мере, концевой области направляющей планки может иметь выпуклое закругление и/или угол захода между 1° и 45°, преимущественно между 5° и 35°, особенно предпочтительно между 10° и 25°. Под углом захода при этом подразумевается угол между идеальным направлением движения роликов (теоретическое направление движения) и прямой в направляющей боковой поверхности в концевой области в плоскости опорной поверхности.
Такая изогнутая или имеющая излом концевая область делает возможным простое улавливание, соответственно придание направления и ориентирование роликов, когда они из-за бокового увода ушли с их оптимальной дорожки качения. Преимущественно обе концевые области направляющей боковой поверхности снабжены такими выпуклыми закруглениями или углами захода, так что независимо от направления движения вперед или назад ролики могут направляться и ориентироваться. Однако также возможно, что направляющая планка имеет только одну такую концевую область. Например, направляющие планки могут быть образованы совсем прямыми, однако могут быть расположены под углом к направлению движения в соответствии с углом захода. Таким образом, хотя работа эскалатора или траволатора возможна всего лишь в одном направлении, зато направляющие планки соответственно могут изготавливаться просто.
На направляющей планке может быть расположен датчик, например, тензорезисторный мост, радиолокационный датчик, GSM-антенна, служащая в качестве датчика, или коммутатор или измерительный щуп для регистрации усилий со стороны ограждения соответственно боковых усилий, действующих на направляющую боковую поверхность. Благодаря тому, что направляющая планка оборудована датчиком, может осуществляться реакция на слишком высокие боковые усилия с генерированием и передачей сообщения о сбое. Датчик может быть, однако, также образован для снятия, соответственно измерений, других параметров работы как, к примеру, температура роликов, их скорость, колебания и вибрация и много другого.
Датчик может быть расположен в области между двумя крепежными средствами. Само собой разумеется, что датчик расположен преимущественно на стороне направляющей планки, обращенной от направляющей боковой поверхности.
Другим аспектом данного изобретения является применение ходовой направляющей, как описано выше, и/или направляющей планки, как описано выше, для ведения роликов, причем направляющая планка оборудована датчиком. Величины, замеренные датчиком, например, усилие или величина расстояния используются для создания служебных сообщений. Например, такая величина, соответственно такое значение, может приниматься блоком обработки сигналов и обрабатываться дальше. Возможно, что сообщения о состоянии или служебное сообщение отправляется автоматически или устанавливается режимом работы.
Возможными служебными сообщениями являются, например:
- при небольших замеренных боковых усилиях: необходим контроль установки и возможно проведение незначительных регулировочных работ, соответственно работ по обслуживанию обслуживающим персоналом внутри в течение недель,
- при средних боковых усилиях: необходим контроль установки обслуживающим персоналом с регулировкой натяжения цепей или замена роликовой цепи в течение 24 часов и возможна всего лишь ограниченная техническая эксплуатация,
- при высоких замеренных боковых усилиях: из соображений безопасности эксплуатация прерывается, пока проводится контроль или ремонт обслуживающим персоналом.
При этом значения «небольшие», «средние», «высокие» это обычно заданные значения, величины и размеры, которые не ограничиваются только боковыми усилиями. Точно также подобные сообщения о состоянии или служебные сообщения возможны также при достижении определенных температур при работе, скоростей эксплуатации или при наступлении заданных значений вибрации.
Направляющая планка, как упомянуто выше, может иметь датчик для регистрации соответственно измерения, по меньшей мере, измеряемой величины. Этой измеряемой величиной может быть механический шум лестничного полотна или бесступенчатого полотна, колебания, толщина бандажей роликов, толщина грязи, налипшей на дорожку качения и/или ролики, или положение кольца шарикоподшипника ролика относительно его оси ролика.
Изобретение ниже более подробно поясняется чертежами, на которых представлено следующее:
фиг. 1 - схематично вид сбоку эскалатора, расположенного на несущей структуре, который имеет опорные структуры, ходовые направляющие, балюстрады и движущееся по замкнутой траектории лестничное полотно, которые расположены между первой областью поворота и второй областью поворота;
фиг. 2 - схематично вид сбоку траволатора, расположенного на несущей структуре, который имеет опорные структуры, ходовые направляющие, балюстрады и движущееся по замкнутой траектории бесступенчатое полотно, которые расположены между первой областью поворота и второй областью поворота;
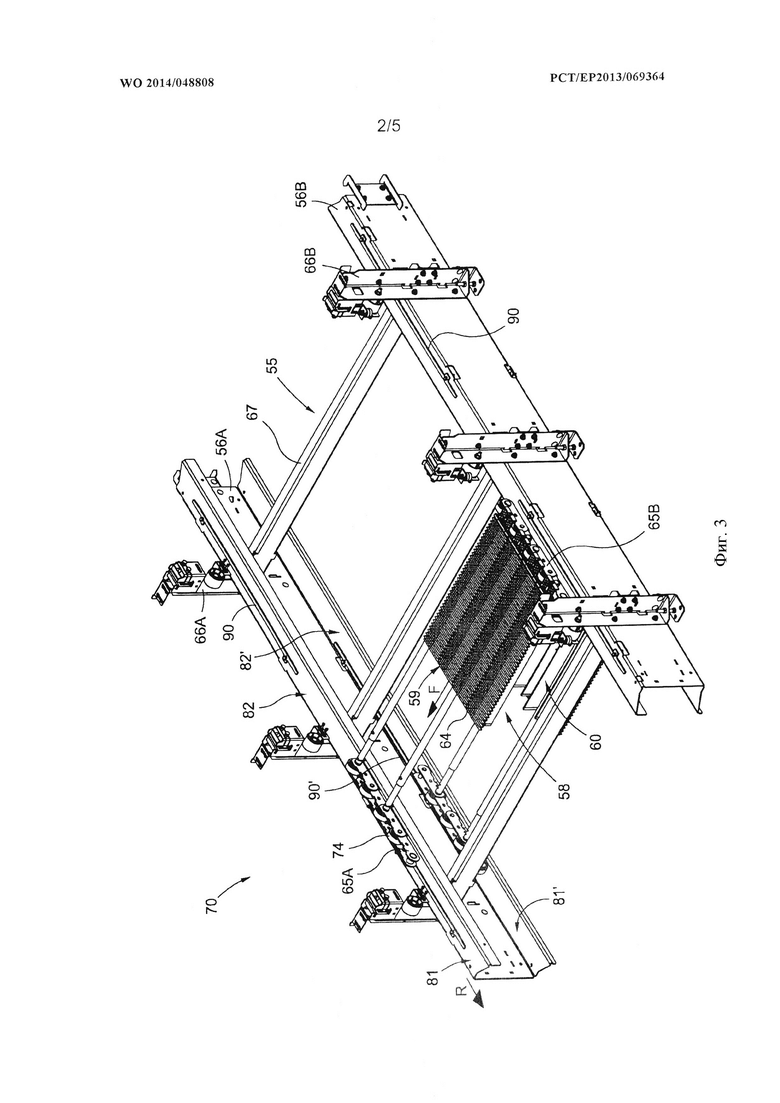
фиг. 3 - пространственный вид модуля полотна траволатора по фиг. 2, образованный из ходовых направляющих и опорных структур;
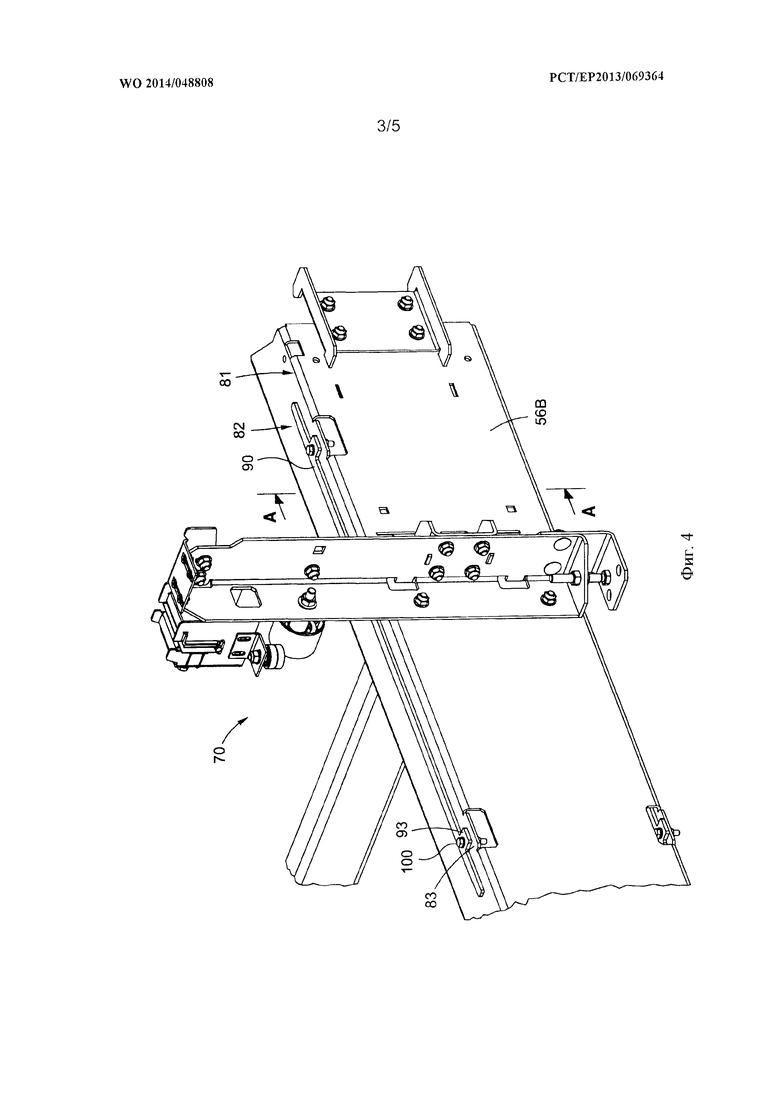
фиг. 4 - увеличенный вид частичной области модуля полотна согласно фиг. 3;
фиг. 5 - поперечное сечение ходовой направляющей и направляющей планки в плоскости разреза А-А, показанной на фиг. 4;
фиг. 6 - пространственный вид направляющей планки;
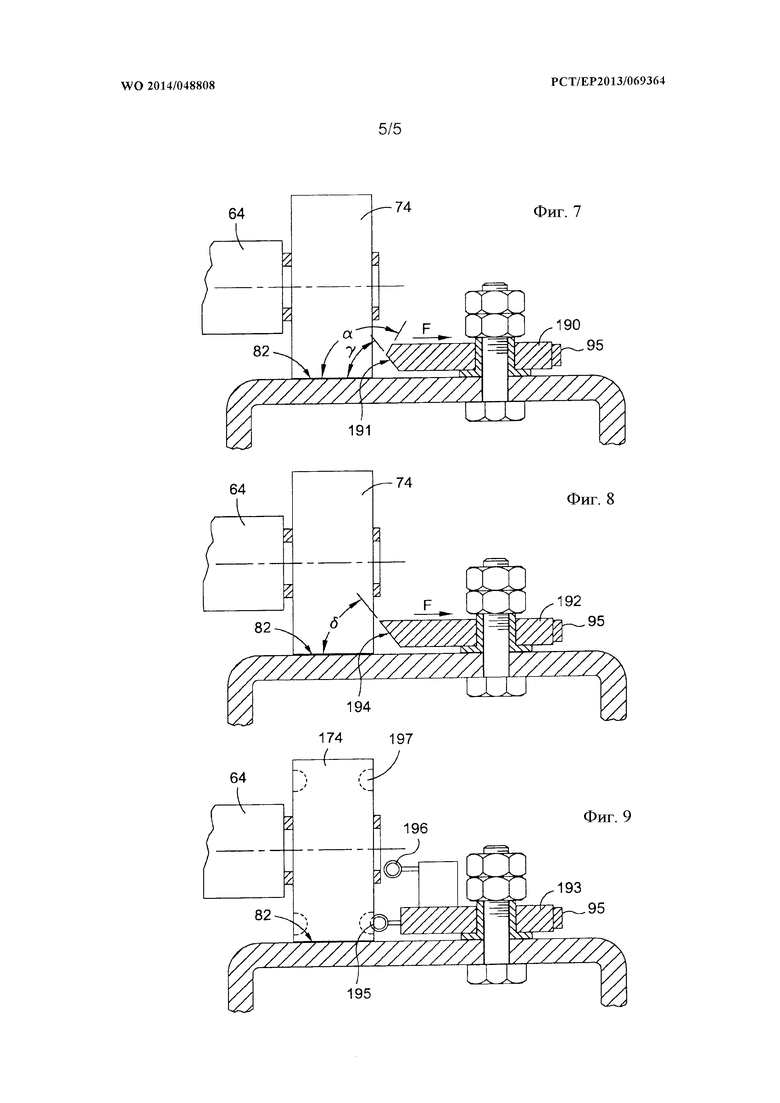
фиг. 7 - поперечное сечение ходовой направляющей и направляющей планки при втором осуществлении аналогично разрезу А-А, изображенному на фиг. 5;
фиг. 8 - поперечное сечение ходовой направляющей и направляющей планки при третьем осуществлении аналогично разрезу А-А, изображенному на фиг. 5;
фиг. 9 - поперечное сечение ходовой направляющей и направляющей планки при четвертом осуществлении аналогично разрезу А-А, изображенному на фиг. 5.
Фиг. 1 иллюстрирует вид сбоку эскалатора 10, который расположен на несущей структуре 11 и который соединяет нижнюю плоскость Е1 с верхней плоскостью Е2. Несущая структура 11 в качестве примера оформлена в стиле старого моста, чтобы ясно показать, что эта несущая структура 11 может быть отдана архитекторам в части свободы исполнения. Несущая структура 11 может быть также в виде бетонированного лестничного марша, решетчатой конструкции или двумя двутавровыми балками. Несущая структура 11 должна выполнять определенные условия относительно своей жесткости и несущей способности, которые изготовитель эскалатора или траволатора задает архитекторам.
На этой несущей структуре 11, выполняемой силами заказчика, могут предусматриваться или потом устанавливаться установочные элементы 12, на которых монтируются части эскалатора 10. Для лучшей наглядности только три установочных элемента 12 снабжены позициями, хотя в настоящем примере для каждой опорной структуры имеется установочный элемент 12. Установочные элементы 12 могут быть простыми монтажными плитами, которые, например, непосредственно соединены с арматурой несущей структуры. При этом могут применяться и другие подходящие установочные элементы 12 как: бетонные анкеры, винтовые штанги, сварные плиты, отверстия под винты и тому подобное.
Эскалатор включает первую область поворота 13 и вторую область поворота 14, а также расположенные между областями поворота 13, 14 опорные структуры 15, ходовые направляющие 16, балюстрады 17 и движущееся по замкнутой траектории лестничное полотно 18. Ради наглядности позицией обозначения снабжена только одна опорная структура 15. Лестничное полотно 18 изменяет направление движения в верхней плоскости Е2 и в нижней плоскости Е1 и имеет таким образом передний ход 19 ступенчатого полотна и обратный ход 20 лестничного полотна. Для лучшей наглядности отказались от детального изображения лестничного полотна 18.
На фиг. 1 ясно видно, что ходовые направляющие 16 разделены на участки 21, 22, 23 ходовых направляющих и с помощью соединительных пластин 25 свинчены друг с другом. Участки 21, 22, 23 ходовой направляющей имеют преимущественно одинаковую длину, но, как можно видеть на фиг. 1, могут иметь и различные длины. Ходовые направляющие с помощью нескольких опорных структур 15 опираются на несущую структуру 11. Из опорных структур 15 видны только опоры 26, направленные к плоскости рассмотрения, поэтому опорные структуры 15 дальше ниже при описании фиг. 3 описываются более подробно. Хотя там описаны опорные структуры изображенного на фиг. 2 траволатора, но конструкция и функционирование опорных структур 15 эскалатора 10 соответствуют опорным структурам, показанным и описанным на фиг. 3. Каждая из опор 26 имеет область крепления основания, которая, как изображено, жестко соединена с приданным установочным элементом 12 несущей структуры 11.
Фиг. 2 иллюстрирует вид сбоку траволатора 50, который расположен на несущей структуре 51. В качестве несущей структуры 51 служит пол соответственно бетонный фундамент, который обладает достаточной прочностью. Траволатор 50 может также монтироваться на одной из несущих структур, как они упоминаются в описании к фиг. 1. Пол также имеет установочные элементы 52, к которым крепятся элементы конструкции траволатора 50. К этим элементам конструкции принадлежат первая область поворота 53 и вторая область поворота 54, а также расположенные между областями поворота 53, 54 опорные структуры 55, ходовые направляющие 56, балюстрады 57 и движущееся по замкнутой траектории бесступенчатое полотно 58. Таким образом, конструкция траволатора 50 в основном соответствует описанной на фиг. 1 конструкции эскалатора 10, даже если в данных примерах осуществления на фиг. 1 и 2 у эскалатора 10 изображены с расположением друг над другом две ходовых направляющие 26, а у траволатора 50 только одна ходовая направляющая 56.
Также изображенные на фиг. 2 ходовые направляющие 56 траволатора 50 разделены на участки 61, 62, 63 ходовых направляющих и опираются с помощью опорных структур 55, области крепления основания которых закреплены к установочным элементам 52. Если отдельные участки 61, 62, 63 ходовых направляющих и приданные им опорные структуры 55 уже на заводе-изготовителе собираются с образованием модулей полотна, транспорт от изготовителя до места установки и монтаж траволатора 50 или эскалатора 10 на подготовленных на месте установки несущих структурах 11, 51 могут существенно упрощаться.
На фиг. 3 показан в пространственном виде модуль 70 транспортного полотна траволатора 50 согласно фиг. 2, образованный из трех опорных структур 55 и двух расположенных друг напротив друг друга ходовых направляющих 56А, 56В, соответственно участков ходовых направляющих. На ходовых направляющих 56А, 56В изображена только небольшая часть бесступенчатого полотна 58, именно, участок 59 бесступенчатого полотна при прямом ходе и участок 60 бесступенчатого полотна при обратном ходе, чтобы показать функцию ходовых направляющих 56А, 56В. Отдельные площадки 64 бесступенчатого полотна 58 изображены только наполовину, чтобы показать обе роликовые цепи 65А, 65В и их ролики 74 по обеим сторонам бесступенчатого полотна 58. Опорные структуры 55 имеют соответственно две опоры 66А, 66В, которые с помощью поперечной связи 67 жестко соединены друг с другом.
Ходовые направляющие 56А, 56В образованы в виде С-профиля. При этом обе полки С-профиля имеют по опорной поверхности 81, 81', на которых проходят дорожки качения 82, 82' для роликов 74, в частности, опорных роликов, а именно роликов ступеней, роликов площадок или роликов цепи ступенчатого полотна или бесступенчатого полотна. При этом опорная поверхность 81 расположена на верхней полке ходовой направляющей 56А, 56В и другая опорная поверхность 81' расположена на нижней полке ходовой направляющей 56А, 56В.
Бесступенчатое полотно 58, ролики 74 которого опираются на ходовые направляющие 56А, 56В, обычно без проблем движется по прямой. С увеличивающимся пробегом изнашиваются звенья цепи, валики цепи и подшипниковые втулки в роликовых цепях 65А, 65В и это может вести к расходящимся удлинениям между левой роликовой цепью 65А и правой роликовой цепью 65В. Этого минимального различия достаточно, чтобы площадки 64, расположенные между роликовыми цепями 65А, 65В, больше не располагались полностью под прямым углом к направлению R движения, и вследствие этого наступало боковое движение. Это движение боком или движение под углом является причиной возникновения бокового усилия F, которое может отклонять ролики 74 от их теоретического направления R движения.
В этих случаях для обеспечения ведения роликов 74 по ходовым направляющим 56А. 56В или по соответствующим дорожкам качения 82, 82', в направлении R движения и таким образом в продольном простирании траволатора или эскалатора, на опорных поверхностях 81, 81' на расстоянии друг от друга расположены направляющие планки 90, 90'. Направляющие планки 90, 90' имеют направляющие боковые поверхности 97 (см. фиг. 5), которые ведут ролики 74 бесступенчатого полотна 58 по ходовым направляющим 56А, 56В. Направляющие планки 90, 90' при этом воспринимают боковое усилие F.
На фиг. 4 представлен увеличенный вид частичной области показанного на фиг. 3 модуля 70 полотна. Можно видеть одну из ходовых направляющих 56В с ее верхней опорной поверхностью 81. На опорной поверхности 81 образованы крепежные средства 83, с помощью которых направляющая планка 90, которая имеет корреспондирующее крепежное средство 93, может располагаться на опорной поверхности 81. Направляющая планка 90, таким образом, ограничивает сбоку дорожку качения 82 роликов 74 (см. фиг. 3) бесступенчатого полотна или ступенчатого полотна.
Как уже было упомянуто, ходовая направляющая 56В оформлена в виде С-профиля. Например, ходовая направляющая 56В может изготавливаться с использованием простого процесса гибки металлического листа. Крепежные средства 83 ходовой направляющей 83 при этом могут вырезаться перед гибкой и после гибки в плоскости опорной поверхности 81 выступать над ходовой направляющей 56В. Направляющие планки 90 крепятся к опорной поверхности 81 с помощью соединения 100, состоящего из винтов и гаек. Точно также возможны другие виды соединения, например, с помощью заклепок, зажимов, сварки, пайки, склеивания, с помощью штифтов и многих других.
Фиг. 5 иллюстрирует поперечное сечение ходовой направляющей 56В с опорной поверхностью 81 в приведенной на фиг. 4 плоскости разреза А-А. Точно также представлен ролик 74 площадки 64 бесступенчатого полотна 58 (см. фиг. 3), который во время ходового режима катится по дорожке качения 82. Направляющая планка 90 имеет направляющую боковую поверхность 97, которая обращена к ролику 74. Эта направляющая боковая поверхность 97 имеет направляющий угол α, который преимущественно составляет 95°. Направляющая планка 90 имеет в качестве крепежного средства 93 сверленое отверстие, в котором расположена опорная втулка 94. Опорная втулка 94 имеет бортик, так что направляющая планка 90 может крепиться без того, чтобы она лежала всей своей нижней стороной на опорной поверхности 81. Это позволяет допустить простое боковое отклонение соответственно прогиба без существенных сил трения между опорной поверхностью 81 и обращенной к ней поверхностью направляющей планки 90, поперек к направлению R движения (см. фиг. 3) роликов 74, когда на направляющую планку 90 действует боковое усилие F. Направляющая планка 90 оборудована датчиком 95. Этот датчик 95 расположен на стороне, расположенной напротив направляющей боковой поверхности 97, например, в форме тензорезисторного моста.
Благодаря продольной протяженности направляющей планки 90, которая закреплена по обеим сторонам, датчик 95 расположен между обоими крепежными средствами 93, так что может регистрироваться отклонение или прогибание направляющей планки 90 при силовом воздействии бокового усилия F. Преимущественно направляющие планки 90 крепятся на ходовой направляющей 56В без датчика 95 и без опорной 94, так что обращенные друг к другу поверхности ходовой направляющей 56В и направляющих планок 90 прилегают друг к другу и придают направляющей планке 90 более высокую жесткость поперек к направлению движения роликов 74. Разумеется, направляющая планка 90 может иметь больше двух крепежных средств 93, если полностью должно отсутствовать или допустимо совсем по возможности небольшое отклонение середины направляющей планки.
Фиг. 6 показывает пространственный вид направляющей планки 90. Отчетливо можно видеть продолговатое образование направляющей планки 90. Дальше в концевой области 96 ее направляющей боковой поверхности 97 можно видеть угол раствора β, который обеспечивает, что ролики 74 (см. фиг. 3), которые удаляются от идеальной линии дорожки качения, снова улавливаются и направляются, соответственно движутся вдоль направляющей боковой поверхности 97. Точно также можно видеть в направляющей планке 90 два сверленых отверстия, которые служат (см. фиг. 3 и 4) в качестве крепежного средства 93 для крепления направляющей планки 90 на ходовой направляющей 56А, 56В, например, с помощью соединения 100, состоящего из винтов и гаек.
На стороне, обращенной от направляющей боковой поверхности 97, расположен датчик 95 в форме тензорезисторного моста. Разумеется могут применяться и другие датчики 95, которые могут регистрировать усилие, действующее на направляющую планку или также ее упругие деформации или смещения относительно ходовой направляющей 56В. Сигнал измерения датчика 95 через измерительную магистраль 98 передается блоку 99 обработки сигнала или сигнал измерения с помощью блока обработки сигнала периодически запрашивается у датчика 95. Блок 99 обработки сигнала обрабатывает сигнал и предоставляет в распоряжение информацию, которая представляет состояние эскалатора или траволатора в области датчика 95. На основе этой информации могут производиться действия, например работа без остановки, служебное сообщение, расчет продолжительности остающейся эксплуатации бесступенчатого полотна или ступенчатого полотна и многие другие. Далее информация может быть снабжена датой и хронологически накапливаться. Обработка, таким образом, истории может дать ценные указания, например, для структурных подгонок.
Фиг. 7 и 8 показывают в основном еще раз тот же разрез А-А фиг. 5. Единственное отличие от фиг. 5 заключается в различно оформленных направляющих планках 190, 192, 193, поэтому идентичные на фиг. 5, 7, 8 и элементы конструкции, как площадка 64, дорожка качения 82 и датчик 95 имеют те же самые позиции обозначения. Они больше подробно не описываются.
Фиг. 7 показывает второй вариант осуществления направляющей планки 190 с датчиком 95. Направляющая боковая поверхность 191 направляющей пластины, направленная к ролику 74, имеет первый угол скоса кромок α>90° и второй угол скоса кромок γ<90°, так что имеется направляющая кромка, направленная к ролику 74 под тупым углом. Это осуществление годится особенно для измерения состояния бандажей роликов. Если состоящий обычным образом из круглого корпуса ролика и бандажного обода ролик 74 начинает по причине износа разрушаться, области бандажного обода могут по периметру выдаваться неодинаково. Эти неодинаково выступающие вращающиеся области воздействуют на направляющую планку 190 увеличивающимся усилием, вследствие чего датчик 95 регистрирует волнообразное изменение усилий. Это изменение усилий может рассматриваться в качестве показателя прогрессирующего разрушения бандажного обода ролика 74.
Изображенное на фиг. 8 третье осуществление направляющей планки 192 с сенсором 95 особенно годится для контроля вкладышей подшипников роликов 74. Для регистрации определенного диапазона диаметра ролика 74, в котором расположен его не показанный подшипник, направляющая планка 192 имеет направляющую боковую поверхность 194, угол скоса кромок которой δ<90°. Направляющая боковая поверхность 194 имеет, таким образом, точно так же направленную к ролику 47 направляющую кромку. Как только вкладыш подшипника ролика 74 будет выдаваться, он будет надавливать на эту направляющую кромку и приложит усилие к сенсору 95.
Фиг. 9 показывает четвертое осуществление направляющей планки 193 с первым датчиком 95 и со вторым датчиком 196. Первый датчик 95 при каждом проходящем мимо ролике с помощью измерительного штифта входит в зацепление с кольцевым свободным положением 197 ролика. В нормальном состоянии каждый ролик 174 подает сигнал с двумя пиками.
Если теперь диаметр ролика 174 из-за явлений износа становится меньше, снижается кольцеобразное свободное положение 197 относительно измерительного штифта, так что ступица ролика 174 создает третий пик. Но если вследствие чрезмерных отложений грязи между дорожкой качения 82 и роликом 174 на дорожке качения 82 возникает способное нести покрытие, ролик 174 поднимается от дорожки качения 82, так что измерительный штифт больше не сможет входить в кольцеобразное свободное положение 197. Вследствие этого измерительный штифт 195 во время прохода ролика 174 касается только его бандажа и первый датчик 95 регистрирует только всего лишь один пик.
Второй датчик 196 служит для регистрации механического шума или вибрации оси цепи площадок, которая соединяет площадку 64 с роликом 174.
Несмотря на то, что изобретение детально было описано с помощью модуля полотна траволатора, очевидно, что модуль полотна эскалатора может выполняться одинаковым образом. Например, несколько направляющих могут применяться с различно образованными направляющими боковыми поверхностями и различными системами датчиков. Дальше дорожка качения при ходе вперед бесступенчатого полотна или ступенчатого полотна может быть образована на первой ходовой направляющей и дорожка качения хода обратно бесступенчатого полотна или ступенчатого полотна может быть образована на второй ходовой направляющей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДВИЖУЩЕГОСЯ ПОЛОТНА ДЛЯ ЭСКАЛАТОРА ИЛИ ТРАВЕЛАТОРА | 2013 |
|
RU2641566C2 |
| СИСТЕМА ПРОЕЗЖЕЙ ЧАСТИ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2015 |
|
RU2672317C1 |
| ШАРНИРНАЯ ЦЕПЬ ТРАВОЛАТОРА ИЛИ ЭСКАЛАТОРА | 2015 |
|
RU2682693C1 |
| ЦЕПНОЕ КОЛЕСО ЭЛЕВАТОРНОЙ ЦЕПИ ИЛИ НАПРАВЛЯЮЩЕЕ КОЛЕСО С УВЕЛИЧЕННЫМ СРОКОМ СЛУЖБЫ | 2013 |
|
RU2640374C2 |
| КОНТРОЛЬ МЕХАНИЧЕСКОГО СОСТОЯНИЯ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2018 |
|
RU2754023C2 |
| АВАРИЙНЫЙ ТОРМОЗ ДЛЯ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2013 |
|
RU2581640C1 |
| СПОСОБ МОДЕРНИЗАЦИИ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2017 |
|
RU2735750C2 |
| ЭСКАЛАТОР | 1994 |
|
RU2092422C1 |
| ЭСКАЛАТОР ИЛИ ТРАВОЛАТОР | 2014 |
|
RU2678529C2 |
| ОСНОВАНИЕ СТУПЕНИ ИЛИ ПЛАТФОРМЫ ДЛЯ ТЕЛЕЖЕК ДВИЖУЩЕГОСЯ УСТРОЙСТВА, ТЕЛЕЖКИ И ДВИЖУЩЕЕСЯ УСТРОЙСТВО | 2008 |
|
RU2499761C2 |


Ходовая направляющая 56A, 56B для эскалатора или траволатора включает, по меньшей мере, ровную опорную поверхность 81, 81' с дорожкой качения 82, 82' для роликов 74, в частности для опорных роликов лестничного полотна или бесступенчатого полотна 58 эскалатора или траволатора и, по меньшей мере, направляющую планку 90, 90' с боковой поверхностью для бокового ведения этих роликов 74. Направляющая планка 90, 90' состоит из отдельных частей, расположенных на ходовой направляющей. Изобретение обеспечивает снижение стоимости изготовления конструкции эскалатора или траволатора. 2 н. и 13 з.п. ф-лы, 9 ил.
1. Эскалатор (10) с лестничным полотном (18) или траволатор (50) с бесступенчатым полотном (58), с первой областью поворота (13, 53) и со второй областью поворота (14, 54), причем бесступенчатое полотно (58), соответственно лестничное полотно (18) выполнено с возможностью перемещения по замкнутой траектории, расположено между первой областью поворота (13, 53) и второй областью поворота (14, 54), причем эскалатор (10) или траволатор (50) содержит, по меньшей мере, расположенную между областями поворота (13, 14, 53, 54) ходовую направляющую (16, 56, 56А, 56В) для ведения лестничного полотна (18) или бесступенчатого полотна (58), а ходовая направляющая (56А, 56В) имеет, по меньшей мере, опорную поверхность (81) с дорожкой качения (82) для роликов (74) лестничного полотна (18) или бесступенчатого полотна (58), причем эскалатор (10) или траволатор (50) включает, по меньшей мере, направляющую планку (90, 90') с направляющей боковой поверхностью (97) для бокового ведения этих роликов (74), причем ролики (74) при ведении находятся в боковом контакте с направляющей боковой поверхностью (79), причем направляющая планка (90, 90') является отдельным элементом конструкции и выполнена с возможностью установки в заданное положение относительно ходовой направляющей (56А, 56В), отличающийся тем, что части по меньшей мере одной направляющей планки (90, 90') расположены на ходовой направляющей (56А, 56В).
2. Эскалатор или траволатор по п. 1, отличающийся тем, что направляющая планка (90) расположена с возможностью разъема на опорной поверхности (81) рядом с дорожкой качения (82) ходовой направляющей (56А, 56В).
3. Эскалатор или траволатор по п. 1 или 2, отличающийся тем, что ходовая направляющая (56А, 56В) имеет, по меньшей мере, другую опорную поверхность (81') с другой дорожкой качения (82'), которая расположена ниже опорной поверхности (81), при этом дорожка качения (82) предназначена для прямого хода (19, 59) роликов (74) ступенчатого полотна (18) или бесступенчатого полотна (58) и другая дорожка качения (82') для обратного хода (20, 60) роликов (74).
4. Эскалатор или траволатор по п. 3, отличающийся тем, что направляющие планки (90, 90') для прямого хода (19, 59) роликов (74) расположены со смещением в направлении (R) движения к направляющим планкам (90') обратного хода (20, 60).
5. Эскалатор или траволатор по п. 1 или 2, отличающийся тем, что ходовая направляющая (56А, 56В) и/или направляющая планка (90, 90') имеют крепежные средства (13, 100), которые обеспечивают боковую установку положения направляющей планки (90, 90') поперек к направлению (R) движения роликов (74).
6. Эскалатор или траволатор по п. 1 или 2, отличающийся тем, что ходовая направляющая (56А. 56В) имеет несколько направляющих планок (90, 90') на прямом ходе (19, 59) и/или на обратном ходе (20, 60).
7. Эскалатор или траволатор по п. 1 или 2, отличающийся тем, что угол скоса кромки (α) между направляющей боковой поверхностью (97) и дорожкой качения (82, 82') составляет от 90° до 140°, предпочтительно от 90° до 135°, особенно предпочтительно от 90° до 125°.
8. Эскалатор или траволатор по п. 1 или 2, отличающийся тем, что, по меньшей мере, направляющая планка (90, 90') имеет датчик (95) для регистрации или измерения боковых сил (F), действующих на направляющую планку (90, 90').
9. Эскалатор или траволатор по п. 8, отличающийся тем, что по меньшей мере одна направляющая планка (90, 90') с датчиком (95) расположена выступающей сбоку по отношению к остальным направляющим планкам (90, 90') в направлении к дорожке качения (82, 82') роликов (74).
10. Эскалатор или траволатор по п. 8, отличающийся тем, что сигнал, подающийся сенсором (95), используется для формирования служебных сообщений.
11. Направляющая планка (90, 90') для эскалатора (10) или траволатора (50) по любому из пп. 1-10 для бокового ведения роликов (74) лестничного полотна (18) или бесступенчатого полотна (58), причем направляющая планка (90, 90') имеет направляющую боковую поверхность (97) с углом скоса кромки (α), отличающаяся тем, что указанная направляющая планка выполнена в виде отдельного элемента конструкции и имеет крепежное средство (93) для крепления на ходовой направляющей (56А, 56В).
12. Направляющая планка по п. 11, отличающаяся тем, что направляющая боковая поверхность (97) имеет в, по меньшей мере, концевой области (96) направляющей планки (90, 90') в направлении (R) движения выпуклый изгиб и/или угол раствора (β) от 1° до 45°, предпочтительно от 5° до 35°, особенно предпочтительно от 10° до 25°.
13. Направляющая планка по п. 11 или 12, отличающаяся тем, что на ней установлен датчик (95) для снятия и/или измерения боковых усилий (F), действующих на направляющую боковую поверхность (97).
14. Направляющая планка по п. 13, отличающаяся тем, что датчик расположен в области между двумя крепежными средствами (23), в основном, посередине.
15. Направляющая планка по п. 11 или 12, отличающаяся тем, что она содержит, по меньшей мере, датчик для регистрации соответственно измерения по меньшей мере одной из измеряемых величин: механического шума, вибрации, толщины обода роликов, толщины грязи, налипающей на дорожку качения и/или ролики, или положение кольца шарикоподшипника ролика относительно его оси ролика.
| JP S58117464 U, 10.08.1983 | |||
| JP S58134367 U, 09.09.1983 | |||
| Пассажирский эскалатор | 1985 |
|
SU1528341A3 |
| ИМПУЛЬСНЫЙ РЕНТГЕНОВСКИЙ ГЕНЕРАТОР | 1993 |
|
RU2050708C1 |
| Измеритель вязкости | 1989 |
|
SU1679280A1 |

