Изобретение относится к способу регистрации и контроля механического состояния эскалатора или траволатора, а также к эскалатору или траволатору с, по меньшей мере, одним регистрирующим устройством для регистрации и контроля механического состояния.
Общеизвестно, что эскалаторы и траволаторы оснащены регистрирующими устройствами для регистрации и контроля механического состояния для обеспечения надежной эксплуатации этих установок для транспортировки пассажиров. Например, в документе CN 20113723 Y раскрыт эскалатор, работу лестничного полотна которого контролируют с помощью сенсора. При отсоединении одной ступени от лестничного полотна образуется проем, который сенсор распознает и выдает соответствующий сигнал на устройство управления эскалатором. Непосредственно после приема сигнала система управления эскалатором останавливает эскалатор.
Также и документ JP 2010269884 А раскрывает эскалатор с регистрирующим устройством для регистрации и контроля механического состояния лестничного полотна. При этом с помощью двух камер производят запись и оценку изображений ступеней эскалатора.
В документе JP 2009190818 А зазор между лестничным полотном и основанием контролируют с помощью множества сенсоров.
Высокая интенсивность контроля или, точнее говоря, контроль по возможности большого числа критических мест эскалатора или траволатора требует, однако, большого количества сенсоров. Недостатком является то, что такое регистрирующее устройство весьма дорого и, в частности, с добавлением каждого дополнительного сенсора возрастает подверженность отказу всей системы в целом или эскалатора или траволатора с такой плотностью контроля.
Поэтому задачей настоящего изобретения является создание способа, а также регистрирующего устройства для регистрации и контроля механического состояния эскалатора или траволатора, которое обеспечивает высокую интенсивность контроля, причем регистрирующее устройство, несмотря на это, требует меньших издержек и обеспечивает высокую эксплуатационную надежность и готовность эскалатора или траволатора.
Эту задачу решают с помощью способа регистрации и контроля механического состояния эскалатора или траволатора с, по меньшей мере, одним движущимся полотном и с, по меньшей мере, одним регистрирующим устройством. Способ включает в себя, по меньшей мере, следующие технологические этапы, которые осуществляют с помощью регистрирующего устройства:
- регистрации, по меньшей мере, одного пространственного изображения, по меньшей мере, одного участка движущегося полотна,
- выбор, по меньшей мере, одной области пространственного изображения,
- сравнение выбранной области с, по меньшей мере, одной областью сравнения, причем эта область сравнения определена трехмерными координатами и представляет собой виртуальное пространство, которое может быть однозначно назначено для выбранной области, и
- выработка сигнала тревоги в случае, если выбранная область отличается от области сравнения, превышая заранее заданные границы.
Поскольку в случае настоящего способа позиции точек, поверхностей и краев пространственного изображения можно сравнивать с виртуальным пространством, точный и, следовательно, безошибочный контроль зависит от того, в какой мере изображение и область сравнения приведены относительно друг друга в пространственное соотношение.
Несложное и точное назначение области сравнения для выбранной области осуществляют в соответствии с изобретения с помощью эталонных меток. Эти эталонные метки назначены для неподвижных компонентов эскалатора или траволатора. В соответствии с этим эталонные метки можно идентифицировать в качестве изображения эталонных меток в пространственном изображении. На практике для неподвижной области, например, ферме или направляющей для вращающегося полотна назначают маркировку или эта область содержит обусловленную конструкцией, характерную особенность, например, характерно выступающую головку болта. В область сравнения, например, с помощью пространственных координат, заложена также эталонная метка, называемая в последующем виртуальной эталонной меткой. Теперь назначение весьма просто, так как виртуальная эталонная метка и изображение эталонной метки могут быть использованы в качестве нулевых точек пространственной системы координат изображения и сравнительной области.
Благодаря этому способу выработки пространственного изображения мгновенного фактического состояния, его сравнения с назначенным виртуальным пространством и его анализа с помощью единственного регистрирующего устройства можно одновременно контролировать большое количество критических мест.
В основу изобретения положено знание о том, что большая часть критичных в отношении безопасности или важных с точки зрения ущерба событий в ходе эксплуатации эскалатора или траволатора сопровождаются пространственным отклонением подвижных компонентов от их предусмотренного направления движения или траектории движения. Конкретно это касается, в частности, вращательно расположенного лестничного полотна эскалатора или вращательно расположенного транспортировочного полотна траволатора, а также расположенных параллельно сбоку от лестничного полотна или транспортировочного полотна поручней или ремней поручней перил или сочлененных лент поручней перил. Из соображений лучшей читаемости эти компоненты, вращательно подвижные относительно неподвижных частей эскалатора или траволатора называют в дальнейшем вращающимся полотном.
Неподвижные части эскалатора или траволатора содержат, например, несущую конструкцию или ферму, а также расположенные в них стационарно компоненты, такие как, например, шпангоуты, направляющие шины, элементы обшивки цоколя балюстрады и аналогичные другие.
Ниже приведены несколько примеров, при которых на основании пространственного отклонения подвижных компонентов от их предусмотренного направления движения могут быть распознаны начинающиеся, критичные в отношении безопасности события и/или начинающиеся события, сопровождаемые ущербом. Эти события не следует понимать в качестве полного списка. Еще множество других причин может привести к пространственному отклонению движущихся компонентов от их предусмотренного направления движения.
Первое возможное событие относится к уменьшению или превышению высоты, например, левой стороны относительно правой стороны поверхности ступени или палеты. Иными словами, поверхность подножки перекошена в поперечном направлении относительно направления движения. Причина этого перекоса может заключаться, например, в поломке оси ступени, уменьшении диаметра вследствие износа или разрушения холостого ролика эскалатора или ролика цепи, разрушении направляющей ступени или палеты, повреждении втулки ступени, разрушении соединения между палетой или ступенью и цепью лестничного полотна или полотна палет или увеличении ролика цепи или холостого ролика эскалатора вследствие попадания грязи на его поверхность качения. Однако возможно также опускание направляющей шины.
Чрезмерный перекос поверхности подножки не только мешает пользователю лестничного полотна, но и может привести также к столкновению поверхности подножки с плитой гребенки или обусловить повреждения направляющих шин и основания цоколя.
Для распознавания перекоса поверхности подножки можно, например, осуществлять контроль пространственного положения нижних краев косоуров ступеней и палет. При этом эти нижние края выбирают из пространственного изображения и сравнивают с областью сравнения. Строго говоря, пространственные координаты зарегистрированных точек выбранной области пространственного изображения сравнивают с вызываемыми из электронной памяти пространственными координатами. На основании сравнения устанавливают их пространственное отклонение. При этом важно, что область сравнения может быть однозначно назначена для выбранной области. Это назначение описано ниже более подробно.
Как только пространственное отклонение выбранной области выйдет за пределы виртуального пространства, определенного граничными значениями, или выбранная область выйдет за его пределы, можно предположить, что наступило подлежащее контролированию событие, в настоящем случае перекос поверхности подножки. Это означает, что распознан чрезмерный, превышающий граничные значения перекос и регистрирующее устройство выработает сигнал тревоги. Этот сигнал тревоги может инициировать различные действия. Сигнал тревоги может быть передан далее на систему управления эскалатором, которая в этом случае остановит вращающееся полотно. Регистрирующее устройство может содержать также, например, оптическое и/или акустическое устройство вывода, которое предупреждает пользователя.
В случае отсутствия целого элемента ступени на пространственном изображении отсутствуют также подлежащие выбору области и, таким образом, пространственные координаты выбранной области, что при сравнении с областью сравнения ведет к максимальному отклонению или превышению граничного значения. В этом случае система управления эскалатором или траволатором должна незамедлительно инициировать аварийное торможение и остановить эскалатор или траволатор.
Также и холостой ролик эскалатора или ролик цепи лестничного полотна можно выбрать из пространственного изображения и соответствующим образом контролировать. При отсутствии холостого ролика эскалатора или ролика цепи или в случае, если их диаметр слишком велик, эта выбранная область (например, виртуальное пространство, определенное с цилиндрической формой) не совпадает с вызванной из памяти областью сравнения, однозначно назначаемой для выбранной области.
Таким образом, из пространственного изображения выбирают предпочтительно области, которые при подлежащем контролировании при возможном событии характеризуются особенно сильными отклонениями от соответствующей области сравнения и поэтому представляют для этого возможного события характерную поверхность или край.
Второе событие относится к перекосу поверхности подножки. Хотя при этом событии поверхность подножки элемента ступени и расположена горизонтально, однако косоуры палеты или ступени расположены не параллельно цоколю балюстрады и ее основанию цоколя или передний и задний края поверхности подножки не расположены под прямым углом к основанию цоколя. Причиной этого перекоса может быть дефектная втулка ступени слева или справа. Или длина одной из транспортирующих цепей вследствие асимметричного износа на одной стороне лестничного полотна или полотна палет больше, чем на другой стороне. Разрушенное соединение (ось ступени) между ступенью или палетой и транспортирующей цепью или дефектные ползуны, которые удерживают полотно палет или лестничное полотно на определенном расстоянии от основания цоколя, также могут привести к перекосу поверхности подножки.
Для распознавания перекоса поверхности подножки можно контролировать, например, пространственное положение косоуров или переднюю кромку поверхностей подножки ступеней и палет. При этом эти области выбирают из пространственного изображения и сравнивают с назначенной областью сравнения.
В пространстве изображены не только области вращающегося полотна, но и неподвижные части, такие как участок основания цоколя или направляющие шины. Для контроля можно измерять также дистанции и угловые положения или параллельность косоуров или передние кромки или задние кромки поверхностей подножки ступеней и палет относительно этих неподвижных частей и оценивать их на основании вызываемой из памяти области сравнения.
Третье возможное событие относится к так называемому опрокидыванию ступеней, как это подробно описано, например, в документе KR 920007689 U. Вследствие дефекта между направляющими шинами и ступенью присутствует бóльший зазор. Прежде чем пользователь покинет лестничное полотно и наступит на гребенку, он должен сделать один шаг. При этом пользователь наступает на переднюю кромку ступени (кромка между поверхностью подножки и поверхностью перехода, в результате чего вследствие большего люфта в системе задняя кромка может приподняться и затем двигаться против гребенки. Увеличенный зазор обычно является следствием износа цепей ступеней, валиков цепи, осей ступеней, втулок ступеней и проушин ступеней.
Для распознавания приподнимания поверхности подножки можно, например, контролировать пространственное положение передней кромки или задней кромки поверхностей подножки ступеней и палет. При этом эти области выбирают из пространственного изображения, сравнивают их с назначенной областью сравнения.
Четвертое событие относится к распознаванию увеличения зазора между ступенью или палетой и основанием цоколя. Эта критическая область, в которой происходят многие несчастные случаи в результате защемления обуви, пальцев, частей одежды и т.д., расположена между стационарным основанием цоколя балюстрады и подвижными ступенями или палетами. Особенно в случае эскалаторов в области перехода от наклонной области к горизонтальной области, где ступени дополнительно еще двигаются вертикально относительно друг друга возможно затягивание предметов, таких как, например, обувь из мягкого вспененного материала, например, PCCR (Propietary closed-cell resine = специализированный герметизированный каучук). В идеальном случае зазор между ступенями и основанием цоколя должен составлять 3 мм. В случае защемления обуви/части одежды/пальца зазор увеличивается. На пространственном изображении может быть распознано увеличение зазора или посторонние предметы (обувь, части одежды и т.д.), а также перемещение лестничного полотна или полотна палет от левой стороны к правой стороне (или наоборот) и изгибание основания цоколя. Это возможное событие может быть зарегистрировано, например, посредством контроля пространственного положения боковых кромок поверхностей подножки ступеней и палет. При этом эти области выбирают из пространственного изображения и сравнивают с назначенной областью сравнения. Сразу после распознавания отклонения на систему управления эскалатором поступает, например, сигнал тревоги и она незамедлительно останавливает эскалатор, прежде чем произойдет дальнейшее втягивание или отрывание частей предметов на гребенке.
Пятое возможное событие относится к переходу с одной поверхности подножки на другую (зазор между двумя поверхностями подножек). Как только части одежды или прочие предметы окажутся в зазоре между поверхностями подножки, они отображаются на пространственных изображениях. В случае выбора поверхностей краевых областей поверхностей подножки эта выбранная область пространственного изображения отличается по форме и положению от назначенной области сравнения и проблему распознают.
Шестое возможное событие относится к натяжению вращающегося поручня или этого вращающегося полотна. При этом регистрирующее устройство расположено таким образом, что одновременно происходит регистрация также участка обратного хода поручня. В случае необходимости контроля поручня регистрирующее устройство, например, при эскалаторе, располагают в нижней области перехода от горизонтального участка к наклонному участку, так как там вследствие силы тяжести и расположения привода поручня в верхней области перехода провисание вращающегося полотна происходит в первую очередь. Незначительное провисание необходимо, поскольку в противном случае вращающееся полотно будет натянуто слишком сильно и возникнет большой износ. При слишком слабом натяжении и соответственно большом провисании существует опасность того, что фрикцион между приводом и вращающимся полотном будет слишком малым. Зафиксированное на пространственном изображении провисание оценивают, например, на основании выбранной дугообразной продольной кромки ремня поручня, которая должна находиться в пределах границ, предписанных сравнительной областью.
При пригодном расположении регистрирующего устройства в момент контроля все перечисленные ранее возможные события можно выявлять или контролировать с помощью одного единственного пространственного изображения регистрирующего устройства, выбирая соответствующие области пространственного изображение и сравнивания их с назначаемой областью сравнения. При этом отдельные выбранные области или отдельные характерные поверхности и кромки, такие как, например, нижние кромки косоуров ступеней, можно использовать многократно, так как на основании сравнения с областью сравнения возможет контроль нескольких возможных событий.
В качестве выбранной области пригодна характерная поверхность или характерная кромка элемента подножки или участка поручня вращающегося полотна. Их пространственное положение относительно нулевой точки в пространственном изображении сравнивают с помощью нулевой точки области сравнения с предопределенными границами их заданного положения. Вследствие заранее определенных границ (допустимых границ) область сравнения всегда представляет собой виртуальное пространство, в котором определяют пространственное расположение или положение точки, кромки или поверхности пространственного изображения.
Превышение заранее заданных границ области сравнения происходит в том случае, если выбранная область в, по меньшей мере, одном месте выступает из виртуального пространства области сравнения. Если при выбранной области кромки или поверхности отсутствуют, то это также рассматривают как превышение заранее определенных границ. То же справедливо в отношении кромок или поверхностей выбранной области, которые с превышением заранее определенных границ угловых допусков расположены не параллельно соответствующим кромках или поверхностям виртуального пространства.
Само собой разумеется, что для достижения достаточного эксплуатационного контроля в процессе эксплуатации эскалатора или траволатора с помощью названного выше регистрирующего устройства вновь и вновь создают пространственные изображения и оценивают их. Временная последовательность отдельных изображений и количество изображений за единицу времени определяются предписаниями и нормами законодательного органа, потребностями пользователя и целью контроля. Так, например, во время простоя эскалатора или траволатора изображение не создают, во время так называемого движения «с ползучей скоростью» (без нагрузки с уменьшенной скоростью) создают четыре изображения в час и при номинальной скорости изображения создают и оценивают каждую минуту. Управление работой регистрирующего устройства осуществляют предпочтительно таким образом, что при каждом полном обороте вращающегося полотна на изображения отображена вся лента. Выборка и сравнение также может быть весьма различной для отдельных участков одного изображения. Так, например, положение элементов подножки можно сравнивать с областью сравнения при каждом пространственном изображении, в то время как провисание ремня поручня контролируют лишь при каждом сотом изображении.
Также не обязательно оценивать каждое пространственное изображение или сравнивать выбранные области с областью сравнения. Например, можно составить также серию пространственных изображений участка вращающегося полотна и путем сравнения с зафиксированными на пространственных изображениях расстояниями поверхностей и кромок, с по меньшей мере, одним изображением эталонных меток выбрать пространственное изображение, наиболее подходящее для назначенной области сравнения и ее виртуальных эталонных меток, и сравнить с, по меньшей мере, одной выбранной областью этого пространственного изображения. За счет этого при известных условиях отпадает необходимость в корректировке пространственного изображения, поскольку выбранные из наиболее подходящего пространственного изображения области имеют, по меньшей мере, приблизительно ту же позицию относительно изображения эталонных точек, что и назначенная область сравнения относительно виртуальной эталонной метки.
Для дальнейшего снижения сложности расчетов предпочтительно, если изображение эталонных меток отображено приблизительно всегда в одном и том же месте каждого пространственного изображения. Для достижения этого может быть предусмотрено устройство для определения позиции, расположенное на неподвижных компонентах эскалатора или траволатора. Оно распознает характерные поверхности, кромки или маркировки элемента подножки или участка поручня вращающегося полотна. Сразу после распознавания устройство для определения позиции вырабатывает триггер для приведения в действие устройства для выработки изображений в зависимости от мгновенной позиции зарегистрированных поверхностей, кромок или маркировок, относящихся к устройству для определения позиции. В результате этого изображения, например, подлежащих регистрации элементов подножки вращающегося полотна составляют всегда в одной и той же позиции относительно неподвижных компонентов эскалатора. Другими словами, хотя изображения и показывают различные элементы подножки, все они, однако, были получены путем съемки в почти одном и том же месте относительно одновременно отображенных неподвижных компонентов. Таким образом, необходимо произвести лишь чрезвычайно незначительную корректировку или можно непосредственно выполнить сравнение с областью сравнения, если в результате сравнения позиций виртуальной эталонной метки и изображения эталонных меток была констатирована достаточная тождественность покрытия. Соответствующим образом можно отказаться от корректуры искажений, которая необходима при слишком большом отклонении позиции вследствие различных углов съемки пространственного изображения относительно области сравнения.
Регистрирующее устройство предпочтительно содержит электронный блок обработки.
С его помощью можно осуществлять, например, выборку области пространственного изображения, а также назначение для области сравнения. Этот блок обработки может включать в себя также блок анализа. С помощью блока анализа можно анализировать положение поверхностей или кромок выбранной области относительно границ области сравнения и определять резерв положения. На основании определенного резерва положения и/или анализа истории нескольких определенных ранее, записанных в память резервов положения можно определить следующий срок проведения работ технического обслуживания. За счет этого можно своевременно распознать намечающиеся повреждения, которые могут стать причиной существенного последующего ущерба, и контролировать их развитие.
На основании резервов положения, которые были классифицированы блоком анализа как важные в отношении технического обслуживания, можно определить вероятные, подлежащие выполнению рабочие этапы, а также предположительно необходимый материал для технического обслуживания. Это также может быть осуществлено автоматически, например, с помощью блока анализа.
Область сравнения можно вырабатывать различным образом и запоминать, например, в запоминающем устройстве регистрирующего устройства или в системе управления эскалатора или траволатора. Область сравнения можно сохранять, однако, также во внешней памяти, например, USB-флэшкарте, на внешнем жестком диске, мобильном телефоне, в вызываемом через интернет банке данных или в облаке всемирной паутины и вызывать ее при необходимости из этих средств памяти.
Для выработки и запоминания области сравнения можно выполнить, например, учебный прогон с помещенным в оболочку элементом, отображающим максимально допустимые отклонения, и сохранить его пространственное изображение в одном из названных выше запоминающих устройств.
Само собой разумеется, что область сравнения таким же образом, как и конструктивные элементы эскалатора или траволатора, можно сконструировать также с помощью трехмерной системы автоматизированного проектирования и записать в память.
Также существует возможность учебного прогона с предусмотренным для эксплуатации вращающимся полотном и создания пространственного изображения области полотна. В последующем из этого пространственного изображения вырабатывают область сравнения, определяя в качестве области сравнения виртуальное пространство, большее на величину граничных значений, путем суммирования граничных значений в форме трехмерных координат применительно к характерным кромкам и поверхностям пространственного изображения.
Далее, для проверки работоспособности регистрирующего устройства можно выполнить тестовый прогон с, по меньшей мере, одним контрольным элементом. Контрольный элемент выполнен таким образом, что он может быть встроен либо в месте участка вращающегося полотна (например, вместо одной ступени), либо задуман в качестве надстраиваемой детали для временного крепления на вращающемся полотне (например, в качестве надстраиваемой манжеты для ремней поручня). Размеры этого контрольного элемента выбраны таким образом, что он в, по меньшей мере, одном месте выступает из области сравнения. В соответствии с этим регистрирующее устройство должно выдавать сигнал тревоги после оценки пространственного изображения контрольного элемента путем выборки и сравнения.
Для осуществления названного выше способа регистрации состояния предложен эскалатор или траволатор с вращательно расположенным полотном и с, по меньшей мере, одним регистрирующим устройством для регистрации и контроля механического состояния. Регистрирующее устройство содержит, по меньшей мере, одно устройство для записи изображений, с помощью которого могут быть выработаны пространственные изображения. Пространственное изображение в соответствии с настоящей брошюрой следует понимать как виртуальную трехмерную модель. Говоря точнее, это пространственное изображение представляет собой по возможности соответствующее масштабу трехмерное воспроизведение записанной структуры в цифровой форме, причем отдельные точки пространственного изображения в виртуальном пространстве определены координатами в трех измерениях и/или векторными координатами.
С помощью регистрирующего устройства состояние вращающегося полотна и/или расположение областей полотна относительно неподвижных компонентов можно регистрировать, вырабатывая, по меньшей мере, одно пространственное изображение участка вращающегося полотна. Характерные поверхности или кромки записанного на этом изображении участка могут быть выбраны с помощью блока обработки регистрирующего устройства и сравнены с трехмерной областью сравнения, сохраненной в запоминающем устройстве. В случае, если в выбранной области происходит превышение заданных областью сравнения границ, регистрирующее устройство вырабатывает сигнал тревоги.
Как уже упоминалось, регистрирующее устройство может содержать расположенное на неподвижных компонентах эскалатора или траволатора устройство для определения позиции, с помощью которого можно регистрировать характерные поверхности, кромки или маркировки элемента подножки или участка поручня вращающегося полотна. С помощью устройства определения позиции в зависимости от мгновенной позиции зарегистрированных поверхностей, кромок или маркировок относительно устройства определения позиции может быть выработан триггер для инициации устройства записи изображений.
Регистрирующее устройство или его устройство для определения позиции может быть расположено между передним ходом вращающегося полотна и обратным ходом вращающегося полотна. Регистрирующее устройство может также содержать несколько устройств для записи изображений, распределенных по длине эскалатора или траволатора, предпочтительно в области критических мест эскалатора или траволатора.
Обычно при эксплуатации в эскалаторах и траволаторах скапливается много грязи, которая может осесть также на устройстве для записи изображений. Если слой грязи слишком велик, то она может закрыть как передающее устройство, например, лазер лазерного сканера, так и приемное устройство, например, фотоэлемент лазерного сканера и ухудшить их работу. Поэтому устройство для записи изображений может быть оснащено прозрачным защитным покрытием, натянутым на передающее устройство и приемное устройство устройства для записи изображений. К тому же регистрирующее устройство может содержать устройство очистки, с помощью которого периодически осуществляют чистку, по меньшей мере, части поверхности прозрачного защитного покрытия.
Следует указать на то, что некоторые из возможных признаков и преимуществ изображения описаны здесь со ссылкой на соответствующий изобретению способ, а другие признаки описаны со ссылкой на соответствующее изобретению устройство. Специалисту понятно, что признаки можно соответствующим образом комбинировать, согласовывать и заменять для достижения следующих форм исполнения изобретения.
Ниже описаны формы исполнения изобретения со ссылкой на приложенные чертежи, причем ни чертежи, ни описание не следует толковать как ограничительные.
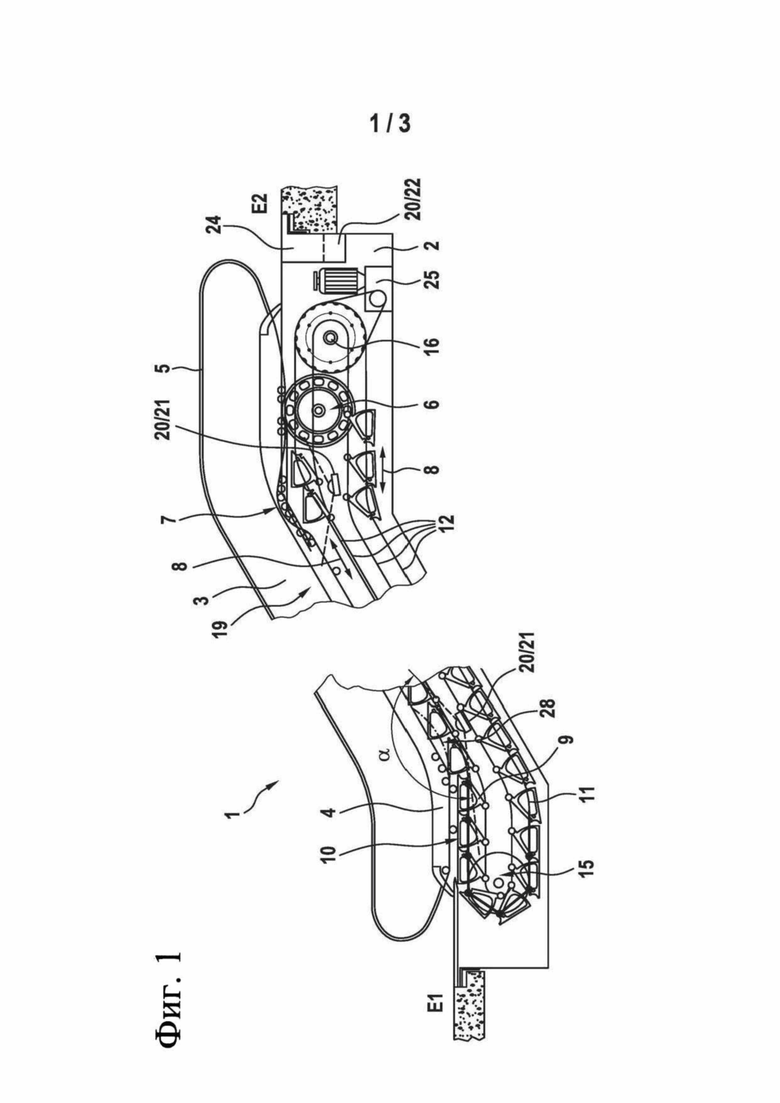
Фиг. 1 показывает эскалатор с регистрирующим устройством в соответствии с формой исполнения настоящего изобретения.
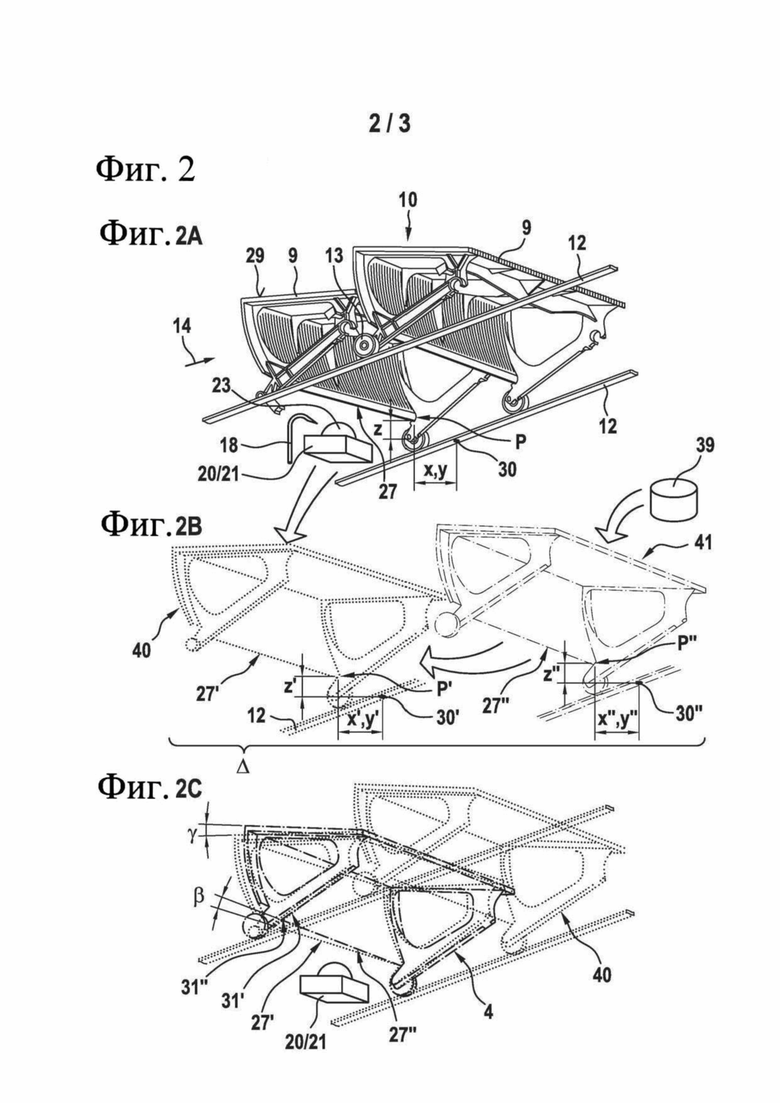
Фиг. 2 схематически показывает на основании частичных фигур с 2А по 2С основные технологические этапы способа в соответствии с формой исполнения настоящего изобретения, а также принцип действия регистрирующего устройства.
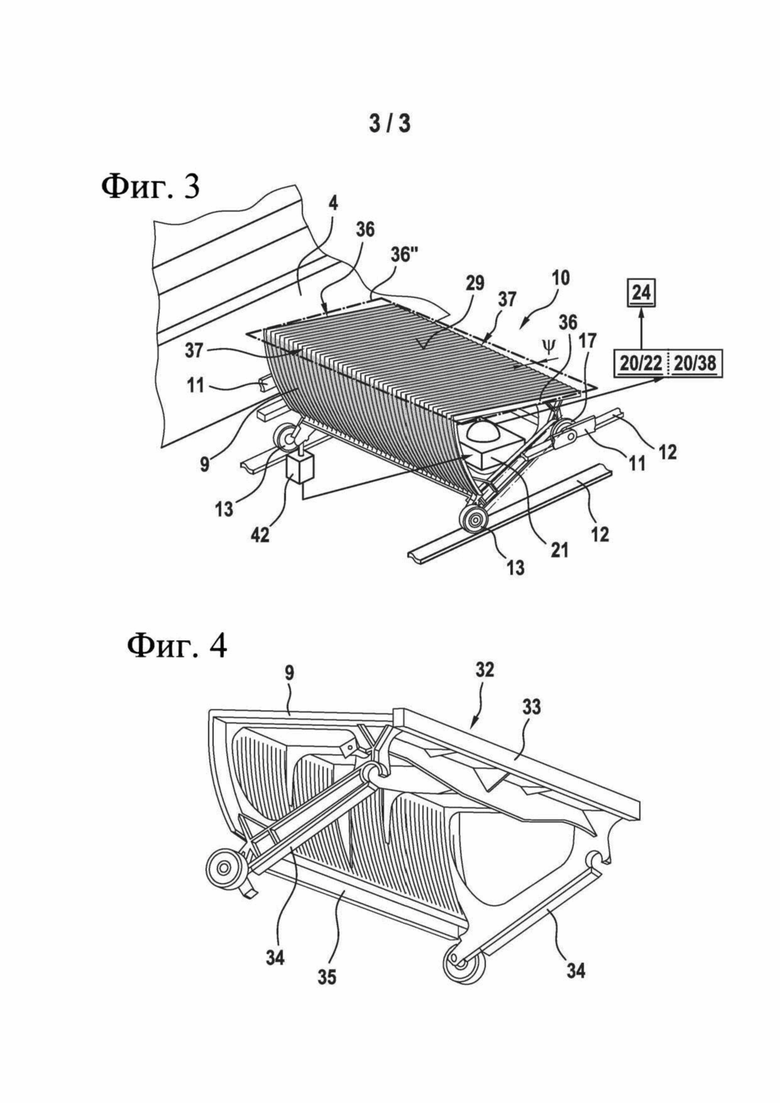
Фиг. 3 показывает ступень эскалатора в качестве участка вращающегося полотна, на основании которого изображено положение, скошенное относительно предусмотренного положения.
Фиг. 4 показывает возможное исполнение заключенного в оболочку элемента, пригодного для учебного прогона.
Фигуры являются чисто схематическими и не выполнены в масштабе. Одинаковые ссылочные обозначения на различных фигурах обозначают одинаковые или равнозначные признаки.
Фиг. 1 показывает вид сбоку на эскалатор 1, с помощью которого можно осуществлять транспортировку людей, например, между двумя уровнями Е1, Е2. Эскалатор 1 содержит несущую структуру 2 в виде фермы, которая для лучшей наглядности изображена лишь своими контурными линиями. Несущая структура 2 служит для крепления компоненты эскалатора 1 и опорой их внутри здания. К числу этих компонентов относятся, например, балюстрады 3 (на виде сбоку видна лишь одна), которые содержат вращательно расположенный поручень 5. Балюстрады 3 соединены с несущей структурой 2 посредством цоколя 4 балюстрады. Поручень 5 или его вращающееся полотно 5 приводят в действие через фрикционный привод 6, который находится в активном соединении с приводным устройством 25 эскалатора 1. Правильное натяжение поручня 5 поддерживают с помощью обозначенного лишь схематически натяжного устройства 7 поручня.
Эскалатор 1 содержит, далее, две кольцеобразно замкнутые, вращающиеся тяговых цепи 11, причем на виде сбоку видна лишь одна. Обе тяговых цепи 11 составлены из множества звеньев цепи. Обе тяговых цепи 11 могут перемещаться вдоль расстояния 8 перемещения в направлении перемещения. Тяговые цепи 11 проходят параллельно друг другу и при этом расположены на расстоянии друг от друга в направлении, поперечном направлению перемещения. В концевых областях, гранича с уровнями Е1, Е2 тяговые цепи 11 отклоняются с помощью перенаправляющих звездочек 15, 16.
Между обеими тяговыми цепями 11 расположены несколько подножек 9 в форме проступов, причем они соединяют тяговые цепи 11 между собой поперечно направлению 8 перемещения. С помощью тяговых цепей 11 подножки 9 можно перемещать в направлениях перемещения вдоль направления 8 перемещения. Направляемые на тяговых цепях 11 подножки 9 образуют при этом лестничное полотно 10, при котором подножки 9 расположены вдоль направления 8 перемещения одна за другой и пользователь может наступать на них, по меньшей мере, в одной области 19 транспортировки. Вращающееся полотно 10 направляют и подпирают против действия силы тяжести с помощью схематически изображенных направляющих шин 12. Эти направляющие шины 12 расположены в несущей структуре 2 стационарно.
Для обеспечения возможности перемещения тяговых цепей 11 цепные звездочки 16 верхнего уровня Е2 соединены с приводным устройством 25. Управление работой приводного устройства 25 осуществляют с помощью системы 24 управления (которая на фиг. 1 изображена лишь схематически). Вращающееся полотно 10 образует вместе с приводным устройством 25 и отклоняющими роликами 15, 16 транспортировочное устройство для пользователей и предметов, подножки 9 которого можно перемещать относительно несущей структуры 2, которая стационарно неподвижно закреплена в здании.
Как уже упоминалось выше, большинство критичных в отношении безопасности и/или существенных в отношении ущерба событий в случае эскалатора 1 или траволатора сопровождаются пространственным перемещением подвижных компонентов из их предусмотренного направления движения. В результате этого начинающийся ущерб можно распознать, в частности, с помощью контроля вращающихся полотен 5, 10, например, лестничного полотна 10 или вращающихся поручней 5. Для достижения этого в эскалаторе 1 расположено регистрирующее устройство 20, которое в настоящем случае содержит два устройства 21 для записи изображений, а также блок 22 обработки. Устройства 21 для записи изображений стационарно расположены на структуре 2 в области перехода между расположенными на уровнях Е1, Е2 горизонтальными участками эскалатора 1 и наклонной средней частью эскалатора 1. Поскольку необходимо контролировать и анализировать нагруженный пользователем передний ход лестничного полотна 10, устройства 21 для записи изображений расположены между передним ходом и задним ходом лестничного полотна 10 или вращающегося полотна 10. Устройства 21 для записи изображений имеют технически обусловленное ограниченное поле α регистрации, которое на фиг. 1 изображено пунктирными линиями и углом α. В результате этого устройство 21 для записи изображений может регистрировать лишь один участок вращающегося полотна 10.
Расположенное в области перехода нижнего уровня Е2 устройство 21 для записи изображений может распознавать также дополнительное провисание 28 поручня 5. Оно возникает точно в этом месте вследствие недостаточного натяжения поручня 5 натяжным устройством 7 поручня и действия силы тяжести.
Оба устройства 21 для записи изображений соединены с блоком 22 управления, расположенном в шкафу управления системы 24 управления и соединенным с ней. Само собой разумеется, регистрирующее устройство 20 может содержать также одно устройство 21 для записи изображений и один блок 22 обработки, которые расположены в одном общем корпусе. Возможно также встраивание блока 22 обработки в вычислительный блок и в устройство памяти системы 24 управления лишь в качестве аппликации программного обеспечения. Само собой разумеется, что существуют и другие возможности централизованного размещения отдельных частей регистрирующего устройства 20 в эскалаторе 1.
На фигурах с 2А по 2С показаны основные технологические этапы осуществляемого с помощью регистрирующего устройства 2 способа в соответствии с настоящим изобретением.
Как уже было показано на основании фиг. 1, а также фиг 2А устройство 21 для записи изображений регистрирующего устройства 20 расположено между прямым ходом 14 и не изображенным обратным ходом стационарно относительно направляющих шин 12. Устройство 21 для записи изображений содержит имеющее форму полусферы прозрачное защитное покрытие 23. Для его периодической очистки от грязи и пыли предусмотрено устройство 18 очистки, которое в настоящем примере изображено в виде пневматической нагнетательной трубы.
Далее, на фиг. 2А изображен участок вращающегося полотна 10, точнее говоря, две подножки 9 лестничного полотна 10. Одна из обеих подножек 9 потеряла тяговую цепь 13, в результате чего произошел перекос ее поверхности 29 для ног. Для улучшения наглядности отсутствует изображение тяговых цепей 11, расположенных по обеим сторонам подножек 9 и соединяющих их осей 26 ступеней, а также направляющих шин 12, которые подпирают ролики 42 цепи (эти компоненты см. на фиг. 3). По обеим изображенным направляющим шинам 12 направляют холостые ролики 13 ступеней 9. Одна из направляющих шин 12 содержит эталонную метку 30, которая может быть распознана среди прочего устройством 21 для съемки изображений. Поскольку устройство 21 для съемки изображений расположено неподвижно постоянно в одном и том же месте, компенсации позиции между эталонной меткой 30 и устройством 21 для съемки изображений не требуется. Однако во время создания пространственного изображения подножка 9 двигается относительно направляющих шин 12 и устройства 21 для записи изображений, в результате чего здесь необходима компенсация позиции или назначение, представленные пространственными координатами х, у, z. Она может быть осуществлена с помощью эталонной метки 30, как описано ниже.
На фиг. 2В схематически пунктирными линиями показано пространственное изображение 40 подножки 9 изображенного на фиг. 2А участка лестничного полотна 10. Далее, с помощью штрихпунктирных линий изображено соответствующее виртуальное пространство 41. Пространственное изображение 40 составляют с помощью устройства 21 для съемки изображений, которое может представлять собой, например, лазерный сканер или Time-of-Flight-камеру (времяпролетную камеру). Эти устройства 21 для съемки изображений, вырабатывающие цифровые пространственные изображения 40, регистрируют трехмерные структуры и отображают их поверхности и кромки с помощью множества точек P’ изображений, причем каждая точка P’ изображения, исходя из виртуальной нулевой точки, определена пространственными координатами x’, y’, z’ изображения или векторными координатами.
Среди прочего можно изображать также неподвижные конструктивные элементы. В настоящем примере в качестве изображения 30’ эталонной метки одновременно была изображена часть направляющих шин 12 и нанесенная на направляющую шину 12 эталонная метка 30. Описанная выше виртуальная нулевая точка может представлять собой, например, центр изображения 30’ эталонной точки.
Пространственное изображение 40 передают на блок 22 обработки (см. фиг. 1). После этого в блоке 22 обработки выбирают, по меньшей мере, одну область 27’ пространственного изображения 40, например, изображение нижней кромки 27 подступенка подножки 9. Выборка в блоке 22 обработки происходит в соответствии с записанными в память критериями, например, на основании областей, в которых при износе или повреждении следует ожидать максимального отклонения от их первоначального или предусмотренного положения.
С помощью блока 22 обработки из электронного запоминающего устройства 39 вызывают назначенную область 27’’ сравнения. Она является, например, частью вызываемого из запоминающего устройства 39, определенного виртуальными координатами x’’, y’’, z’’ виртуального пространства 41, поверхности и кромки которого соответствуют измененному на величину предельных значений пространственному изображению участка вращающегося полотна 10 в первоначальном положении. В качестве первоначального положения следует понимать исходное состояние до момента изменения его положения вследствие износа, повреждения и загрязнения. В виртуальном пространстве 41 присутствует виртуальная эталонная метка 30’’. Изображенное на фиг. 2В виртуальное пространство служит исключительно в виде примера и может быть использовано в целом как область 27’’ сравнения. Так, например, целое изображенное виртуальное пространство 41 можно привлечь как область 27’’ сравнения. Возможно также, однако, что в качестве области 27’’ сравнения в отношении виртуальной метки 30’’ в память записаны лишь отдельные, пространственно расширенные на величину граничных значений кромки 27 или поверхности подножки 9. Само собой разумеется, что в области 27’’ сравнения могут быть отображены также и другие конструктивные элементы вращающегося полотна 10.
В блоке 22 обработки можно к тому же определять пространственные координаты x’’, y’’, z’’ изображения между изображением 30’ эталонной точки и однозначно идентифицируемой точкой, например, точкой Р нижней кромки 27 подступенка или зарегистрированной точкой Р’ изображения выбранной области 27’. Если к моменту составления пространственного изображения точка Р подножки 9 имела пространственные координаты x, y, z относительно эталонной точки 30, то логичным образом пространственные координаты х‘, y’, z’ изображенной на пространственном изображении 40 точки P’ изображения относительно также изображенной эталонной метки 30’ идентичны пространственным координатам x, y, z. В идеале выбирают однозначно идентифицируемые точки Р.
В случае создания пространственного изображения 40 устройством 21 записи изображений в любой момент времени было бы чисто случайным, если выбранная область 27’ пространственного изображения 40 имела бы точно те же самые пространственные координаты x’, y;, z’ изображения относительно изображения 30’ эталонной точки, что и соответствующая область 27’’ сравнения относительно виртуальной эталонной метки 30’’. Поэтому на первом этапе осуществляют назначение выбранной области 27’ для соответствующей области 27’’ сравнения.
Точнее говоря, необходимо произвести расчет пространственной разности Δ положения, например, точки P’ изображения относительно сообщающейся с ней виртуальной точкой P’’ соответствующей области 27’’ сравнения с привлечением изображения 30’ эталонной точки и виртуальной метки 30’’ и пересчет координат точек P’ изображения выбранной области 27’ с помощью рассчитанной разности Δ положения. Также должны быть учтены всевозможные оптические искажения вследствие точечно-симметрично составленного пространственного изображения 40. После описанного выше назначения, например, пространственное изображение 40 подножки 9 не изношенного и не нагруженного лестничного полотна 10 почти конгруэнтно виртуальному пространству 41 относительно выбранной области 27’ с назначенной областью 27’’ сравнения. Почти конгруэнтно по той причине, что область 27’’ сравнения всегда на величину граничных значений больше назначенной выбранной области 27’.
На втором этапе можно определить находятся ли еще точки P’ изображения выбранной области 27’ внутри назначенной области 27’’ сравнения или нет.
Это сравнение схематически изображено на фиг. 2С. В результате назначения область 27’’ сравнения и выбранная область 27’ наложены друг на друга и теперь можно определить наибольшие отклонения. В настоящем примере пространственное изображение 40 подножки 9 отличается от виртуального пространства 41 недопустимым образом, что показано углами β и γ. Поскольку отобранная в качестве выбранной области 27’ нижняя кромка 27 подступенка подножки 9 имеет недопустимый угол β отклонения, регистрирующее устройство 20 вырабатывает адресованный системе 24 управления сигнал тревоги, который незамедлительно тормозит и останавливает вращающееся полотно 10. Как хорошо видно, некоторые области пространственного изображения 40, например, нижняя кромка 31’ косоура пространственного изображения 40 выступает из назначенной области 31’’ сравнения. В соответствии с этим можно было выбрать также и эту нижнюю кромку 31’ косоура. Чем больше выбирают областей 27’, 31’ пространственного изображения 40 и сравнивают их с однозначно назначаемыми, то есть эквивалентными по своему контуру, но не обязательно по своему положению областями 27’’, 31’’ сравнения, тем точнее можно распознать отклонения и, следовательно, технические проблемы движущейся ленты 10.
Фиг. 3 показывает подножку 9 в качестве участка вращающегося полотна 10. Несмотря на то, что поверхность 29 для ног подножки 9 выравнена горизонтально, она находится в преувеличенно показанном на фиг. 3 наклонном положении, обозначенном углом γ. Возможной причиной этого наклонного положения относительно заданного направления движения могут быть неравномерные проявления износа тяговых цепей 11, которые приводят к различной длине тяговых цепей 11. Наклонное положение подножки 9 может привести к увеличению зазора между граничащим цоколем 4 балюстрады и боковой кромкой 36 поверхности 29 для ног и тем самым нежелательно способствовать защемлению предметов или частей тела пользователя. Для обнаружения наклонного положения можно выбрать зафиксированные на пространственном изображении 40 боковые кромки 36 и поперечные кромки 37 поверхности 29 для ног, через которые не представленное изображение эталонной точки назначают для соответствующей области 36’’ сравнения и сравнивают с ней.
Из примера фиг. 3 видно, что боковые кромки 36 и поперечные кромки 37 или выбранная область с изображениями этих боковых кромок 36 и поперечных кромок 37 еще не выходят за заранее определенные границы области 36’’ сравнения. Конечно, некоторые места боковых кромок 36 и поперечных кромок 37 уже находятся вблизи этих границ области 36’’ сравнения. Регистрирующее устройство 20 содержит предпочтительно электронный блок 22 обработки с блоком 38 анализа. С помощью блока 38 анализа можно анализировать положение поверхностей или кромок выбранной области относительно границ области 36’’ сравнения и определять резерв ψ положения или в настоящем случае угол ψ скошенного положения. На основании определенного резерва ψ положения и/или посредством анализа истории нескольких ранее определенных, записанных в память резервов ψ положения или углов ψ можно определить следующий срок проведения технического обслуживания. За счет этого своевременно распознают намечающиеся повреждения, которые могут быть причиной существенного последующего ущерба, и контролируют их развитие.
На основании резерва ψ положения, классифицированного блоком 38 анализа как важный в отношении технического обслуживания, можно определить предположительно подлежащие выполнению рабочие этапы, а также предположительно необходимый для технического обслуживания материал, в настоящем случае тяговые цепи 11 с их роликами 17 цепи. При определенных обстоятельствах это можно осуществлять также автоматически, например, с помощью блока 38 анализа.
Изображенное на фиг. 1 провисание 28 поручня можно контролировать точно таким же образом. При этом назначенной областью сравнения является имеющее форму трубы виртуальное пространство, центральная ось которого соответствует изгибу, существовавшему на этом участке поручня 5 при вводе эскалатора 1 в эксплуатацию. Слишком сильно натянутый поручень 5 выступает на верхней границе, а слишком слабо натянутый поручень 5 выступает на нижней границе из назначенной области сравнения.
Как уже упоминалось, может быть также предусмотрено расположенное на неподвижных компонентах эскалатора или траволатора устройство 42 для определения позиции. Оно регистрирует характерные поверхности, кромки или маркировки подножки 9 или участка поручня движущегося полотна 5, 10. На фиг. 3 в качестве устройства 42 определения позиции на одной из направляющих шин 12 расположен сенсорный переключатель. Сразу после прохождения оси холостого ролика 13 рядом с устройством 42 для определения позиции оно вырабатывает триггер для инициации устройства 21 для записи изображений в зависимости от мгновенной позицией распознанных поверхностей, кромок или маркировок относительно устройства 42 для определения позиции. За счет этого пространственные изображения подножек 9 составляют почти в одинаковой позиции относительно неподвижных компонентов, таких как направляющие шины 12. Говоря другими словами, хотя пространственные изображения и показывают различные подножки 9, однако, все они были записаны почти в том же месте относительно окружающих их неподвижных компонентов. Таким образом, иногда можно отказаться от корректуры искажений пространственных изображений и после компенсации позиции непосредственно выполнить сравнение с областью сравнения с помощью эталонных меток.
Возможный функциональный отказ устройства 42 для определения позиции не является в дальнейшем проблематичным, так как с помощью эталонных меток в любое время можно выполнить необходимые назначения и корректировки. Это в решающей мере повышает готовность регистрирующего устройства и поэтому также готовность эскалатора или траволатора.
Фиг. 4 показывает возможное исполнение заключенного в оболочку элемента 32, пригодного для учебного прогона. Этот заключенный в оболочку элемент 32 представляет собой, например, обычную подножку 9, в которую встроены имитирующие граничные значения встроенные части 33, 34, 35. Теперь заключенный в оболочку элемент 32 вставляют во вращающееся полотно 10 и перемещают к устройству 21 для записи изображений. Созданное устройством 21 для записи изображений пространственное изображение содержит также описанное на фиг. 2 изображение 30’ эталонной метки и может быть предварительно обработано блоком 22 обработки с выполнением, например, корректировки искажений с помощью устройства 21 для записи изображений на основании точечно-симметричного изображения. Для уменьшения объема данных и экономии ресурсов памяти в качестве виртуального пространства 41 в запоминающем устройстве 39 можно сохранять лишь контурные линии этого предварительно обработанного пространственного изображения. Затем отдельные области этого виртуального пространства 41 можно выбрать в качестве назначаемых областей 27’’, 31’’ сравнения и записать их в память.
Несмотря на то, что изобретение было описано путем показа специфических примеров исполнения, очевидно, что при знании настоящего изобретения возможно создание других многочисленных вариантов исполнения, например, при комбинировании между собой признаков отдельных примеров исполнения и/или замене отдельных функциональных блоков примеров исполнения. Например, устройством для определения позиции может быть также сам лазерный сканер, осуществляя, например, непрерывный контроль определенного места пространства на предмет определения того, находится ли, например, однозначно идентифицируемое, характерное место ступени эскалатора именно там или нет. С помощью поручня также может быть инициирован момент времени записи, однако, при определенных обстоятельствах он должен быть оснащен маркировкой в качестве инициирующего триггер, характерного места тела. Для повышения наглядности на фиг. с 1 по 4 полностью отказались от изображения средств для передачи сигналов, линий электропитания и т.п. Они должны, однако, обязательно присутствовать, чтобы обеспечить возможность безошибочной эксплуатации эскалатора с соответствующим изобретению устройством контроля. В результате этого соответственно выполненные эскалаторы охвачены объемом охраны настоящей формулы изобретения.
В завершение следует указать на то, что такие понятия, как «содержащий», «включающий в себя» и т.п. не исключают другие элементы или этапы, а такие понятия, как «одна» или «один» не исключают множественного числа. Ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ 3D-МОДЕЛИ НЕСУЩЕЙ СТРУКТУРЫ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2018 |
|
RU2752206C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ УСТАНОВКИ ДЛЯ ТРАНСПОРТИРОВКИ ПАССАЖИРОВ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОГО ДВОЙНИКА | 2019 |
|
RU2778858C2 |
| КОМПОНОВКА КОНТРОЛЬНОГО ДАТЧИКА В ЭСКАЛАТОРЕ ИЛИ В ТРАВОЛАТОРЕ | 2014 |
|
RU2647391C2 |
| НАПРАВЛЯЮЩАЯ ПЛАНКА ДЛЯ ХОДОВОЙ НАПРАВЛЯЮЩЕЙ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2013 |
|
RU2634753C2 |
| АВАРИЙНЫЙ ТОРМОЗ ДЛЯ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2013 |
|
RU2581640C1 |
| СИСТЕМА ПРОЕЗЖЕЙ ЧАСТИ ЭСКАЛАТОРА ИЛИ ТРАВОЛАТОРА | 2015 |
|
RU2672317C1 |
| СИСТЕМА ДВИЖУЩЕГОСЯ ПОЛОТНА ДЛЯ ЭСКАЛАТОРА ИЛИ ТРАВЕЛАТОРА | 2013 |
|
RU2641566C2 |
| ШАРНИРНАЯ ЦЕПЬ ТРАВОЛАТОРА ИЛИ ЭСКАЛАТОРА | 2015 |
|
RU2682693C1 |
| ОСВЕЩАЕМАЯ ПАНЕЛЬ ДЛЯ ЭСКАЛАТОРА, ДВИЖУЩЕГОСЯ ТРОТУАРА ИЛИ ЛИФТА | 2012 |
|
RU2642464C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЛЕКТОВАНИЯ ИЗГОТАВЛИВАЕМОГО УСТРОЙСТВА ДЛЯ ПЕРЕВОЗКИ ЛЮДЕЙ ПОСРЕДСТВОМ СОЗДАНИЯ ЦИФРОВОГО ДВОЙНИКА | 2018 |
|
RU2769372C2 |
Создают пространственное изображение участка вращающегося полотна, выбирают область пространственного изображения, сравнивают выбранную область с областью сравнения. Область сравнения определена трехмерными координатами и представляет собой виртуальное пространство, которое может быть однозначно назначено для выбранной области. Вырабатывают сигнал тревоги в случае, если выбранная область, выходя за предопределенные границы, отличается от области сравнения. Область сравнения назначают для выбранной области с помощью эталонных меток, соответствующих неподвижным компонентам эскалатора или траволатора, и эти эталонные метки могут быть идентифицированы как в пространственном изображении, так и в соответствующей области сравнения. Предложен также эскалатор. Достигается высокая интенсивность контроля, высокая эксплуатационная надежность. 2 н. и 12 з.п. ф-лы, 6 ил.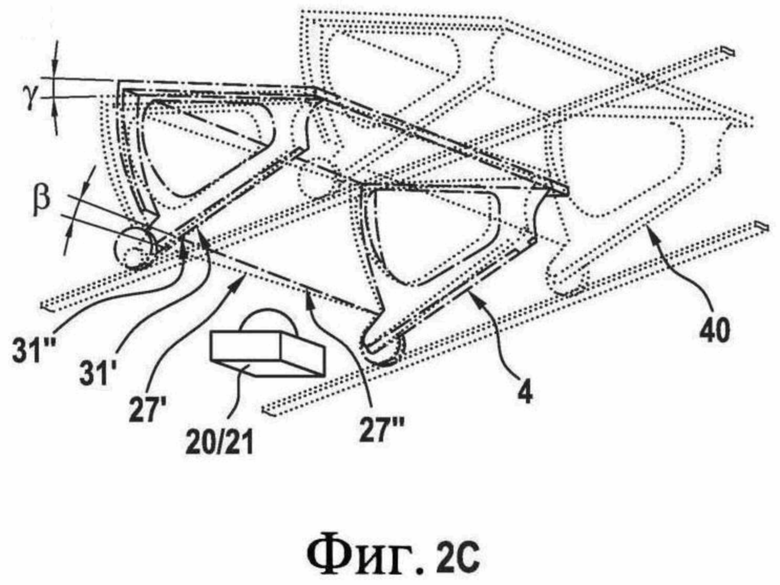
1. Способ регистрации и контроля механического состояния эскалатора (1) или траволатора с, по меньшей мере, одним вращающимся полотном (5, 10) и с, по меньшей мере, одним регистрирующим устройством (20), причем с помощью регистрирующего устройства (20) выполняют, по меньшей мере, следующие технологические этапы:
- создают, по меньшей мере, одно пространственное изображение (40), по меньшей мере, одного участка вращающегося полотна (5, 10),
- выбирают, по меньшей мере, одну область (27’, 31’) пространственного изображения (40),
- сравнивают выбранную область (27’, 31’) с, по меньшей мере, одной областью (27’’, 31’’) сравнения, причем эта область (27’’, 31’’) сравнения определена трехмерными координатами (x’’, y’’, z’’) и представляет собой виртуальное пространство (40), которое может быть однозначно назначено для выбранной области (27’, 31’), и
- вырабатывают сигнал тревоги в случае, если выбранная область (27’, 31’), выходя за предопределенные границы, отличается от области (27’’, 31’’) сравнения,
отличающийся тем, что область (27’’, 31’’) сравнения назначают для выбранной области (27’, 31’) с помощью эталонных меток (30’, 30’’), соответствующих неподвижным компонентам (12) эскалатора (1) или траволатора и эти эталонные метки (30’, 30”) могут быть идентифицированы как в пространственном изображении (40), так и в соответствующей области (27’’, 31’’) сравнения.
2. Способ по п. 1, отличающийся тем, что в качестве выбранной области (27’, 31’) вращающегося полотна выбирают, по меньшей мере, одну характерную поверхность или характерную кромку (27, 31) подножки (9) или участка поручня (5).
3. Способ по п. 2, отличающийся тем, что предопределенные границы области (27’’, 31’’) превышены в том случае, если выбранная область (27’’, 31’’) в, по меньшей мере, одном месте выступает из виртуального пространства (41) и/или в выбранной области (27’’, 31’’) отсутствуют кромки (27) или поверхности (31) и/или кромки или поверхности выбранной области (27’, 31’) превышают предопределенную границу углового допуска, расположены не параллельно соответствующим кромкам или поверхностям виртуального пространства (41).
4. Способ по п. 2 или 3, отличающийся тем, что регистрируют серию пространственных изображений (40) участка вращающегося полотна (5, 10) и на основании сравнения зафиксированных на изображениях (40) расстояний поверхностей и кромок относительно, по меньшей мере, одного изображения (30’) эталонной метки выбирают пространственное изображение (40), наиболее подходящее для назначенной области (27’’, 31’’) сравнения и ее виртуальной метки (30’’), и, по меньшей мере, одну выбранную область (27’’, 31’’) этого пространственного изображения (40) сравнивают с областью (27’’, 31’’) сравнения.
5. Способ по любому из пп. 1-4, отличающийся тем, что посредством расположенного на неподвижных компонентах (12) эскалатора (1) или траволатора устройства (42) для определения позиции регистрируют характерные поверхности, кромки (27) или маркировки подножки (9) или участка поручня вращающегося полотна (5, 10) и вырабатывают триггер для инициации устройства (21) для записи изображений регистрирующего устройства (20) в зависимости от мгновенной позиции зарегистрированных поверхностей, кромок (27, 31) или маркировок относительно устройства (42) для определения позиции.
6. Способ по любому из пп. 1-5, отличающийся тем, что с помощью, по меньшей мере, одного блока (38) анализа анализируют положение поверхностей или кромок выбранной области (27’, 31’) относительно границ области (27’’, 31’’) сравнения и определяют резерв (ψ) положения и на основании определенного резерва (ψ) положения и/или путем анализа истории нескольких, ранее определенных, записанных в память резервов (ψ) положения определяют следующий срок проведения работ технического обслуживания.
7. Способ по п. 6, отличающийся тем, что из резерва (ψ) положения, который был классифицирован блоком (38) анализа как важный в отношении технического обслуживания, определяют предположительно подлежащие выполнению рабочие этапы, а также материал, предположительно необходимый для технического обслуживания.
8. Способ по любому из пп. 1-7, отличающийся тем, что для выработки и запоминания области (27’’, 31’’) сравнения выполняют учебный прогон с использованием заключенного в оболочку элемента (32), имитирующего максимально допустимые отклонения, и записывают в запоминающее устройство (39) его пространственное изображение (40).
9. Способ по любому из пп. 1-7, отличающийся тем, что учебный прогон выполняют с предусмотренным для эксплуатации вращающимся полотном (5, 10) и создают пространственное изображение (40) участка вращающегося полотна (5, 10) и из этого пространственного изображения (40) путем суммирования граничных значений в форме трехмерных координат относительно характерных кромок и поверхностей пространственного изображения вырабатывают область (27’’, 31’’) сравнения.
10. Способ по любому из пп. 1-9, отличающийся тем, что для проверки функциональной способности регистрирующего устройства (20) выполняют испытательный прогон с, по меньшей мере, одним испытательным элементом, причем испытательный элемент имеет такие размеры, что он в, по меньшей мере, одном месте выступает из области (27’’, 31’’) сравнения.
11. Эскалатор (1) или траволатор с вращательно расположенным полотном (5, 10) и с, по меньшей мере, одним регистрирующим устройством (20) для регистрации механического состояния эскалатора (1) или траволатора, причем регистрирующее устройство (20) содержит, по меньшей мере, одно устройство (21) для записи изображений, выполненное с возможностью вырабатывать пространственные изображения (40), причем с помощью регистрирующего устройства (20) может регистрироваться состояние вращающегося полотна (5, 10) и/или расположение участков полотна (5, 10) относительно неподвижных компонентов (12) эскалатора (1) или траволатора с созданием, по меньшей мере, одного пространственного изображения (40) участка вращающегося полотна (5, 10), с помощью блока (22) обработки регистрирующего устройства (20) выбираться характерные поверхности или кромки (27’, 31’) записанного на этом изображении (40) участка и сравниваться с сохраненной в запоминающем устройстве (39) трехмерной областью (27’’, 31’’) сравнения, отличающийся тем, что область (27’’, 31’’) сравнения может назначаться для выбранной области (27’, 31’) с помощью эталонных меток (30’, 30’’), причем эталонные метки (30’, 30’’) назначаются для неподвижных компонентов (12) эскалатора (1) или траволатора и причем эталонные метки (30’, 30’’) могут идентифицироваться как в пространственном изображении (40), так и в соответствующей области (27’’, 31’’) сравнения.
12. Эскалатор (1) или траволатор по п. 11, отличающийся тем, что он содержит расположенное на неподвижных компонентах (12) эскалатора (1) или траволатора устройство (42) для определения позиции, выполненное с возможностью регистрировать характерные поверхности, кромки (27, 31) или маркировки подножки (9) или участка поручня вращающегося полотна (5, 10) и вырабатывать триггер для инициации устройства (21) для записи изображений в зависимости от мгновенной позиции зарегистрированных поверхностей, кромок (27, 31) или маркировок относительно устройства (42) для определения позиции.
13. Эскалатор или траволатор по п. 11 или 12, отличающийся тем, что регистрирующее устройство (20) расположено между прямым ходом (4) вращающегося полотна (5, 10) и обратным ходом вращающегося полотна (5, 10).
14. Эскалатор или траволатор по любому из пп. 11-13, отличающийся тем, что устройство (21) для записи изображений оснащено прозрачным защитным покрытием (23), а регистрирующее устройство (20) содержит устройство (18) очистки, выполненное с возможностью периодически производить очистку, по меньшей мере, части поверхности прозрачного защитного покрытия (23).
| JP2010269884A, 02.12.2010 | |||
| Строительный элемент | 1981 |
|
SU1013599A1 |

