Область техники, к которой относится изобретение
Изобретение относится к транспортным средствам, имеющим двигатель внутреннего сгорания и, в частности, к транспортным средствам с системой, обеспечивающей движение накатом при наличии одного или нескольких заранее заданных условий.
Уровень техники
Из уровня техники известно использование в транспортных средствах систем для отключения источника двигательной энергии (двигателя) транспортного средства от линии привода одного или нескольких колес, что известно как «движение накатом». Такая система отключает привод от двигателя, если определено, что для этого появляется возможность, что позволяет сократить потребление топлива и уменьшить вредные выбросы двигателя. Известны два вида движения накатом - «свободное качение» и «дрейф».
В режиме «свободного качения» двигатель отключается от трансмиссии и останавливается. В режиме «дрейфа» двигатель отключается от трансмиссии, но продолжает работать.
При длительном движении под уклон накатом у транспортных средств с автоматической и механической трансмиссией наблюдается несколько недостатков. Во-первых, спуск без торможения двигателем может привести к чрезмерному износу и, в крайних случаях, к перегреву тормозов. Во-вторых, дорожные качества транспортного средства могут ухудшиться, поскольку водителю приходится в течение длительного периода времени управлять скоростью транспортного средства непосредственно с помощью педали тормоза. Следовательно, чрезмерный износ тормозов и плохие дорожные качества транспортного средства являются потенциальными недостатками езды накатом при длительном движении под уклон.
Из уровня техники, например из публикации WO 2011/015430, известно, что для устранения данных недостатков езду накатом не используют, если склон или отрицательный угол наклона (называемый «спуск») больше заранее заданной величины. Однако этот способ может сделать движение накатом невозможным, даже когда его использование не будет иметь значительного влияния на дорожные качества транспортного средства, износ или перегрев тормозов, например, когда транспортное средство пересекает холмистую местность с чередующимися короткими спусками и движением в гору или под положительными углами наклона (называемыми «подъемами»). В этом случае система, известная из уровня техники и описанная в документе WO 2011/015430, запрещает движение накатом ввиду крутизны одного или нескольких спусков, в то время как на практике потери управления транспортным средством не происходит, поскольку любое ускорение на коротком спуске будет компенсировано замедлением на подъеме.
Целью настоящего изобретения является описание способа и системы управления работой транспортного средства, которая устраняет или сводит к минимуму проблемы, известные из уровня техники.
Раскрытие изобретения
Согласно первому аспекту изобретения представлен способ управления транспортным средством, включающий в себя использование режима наката при наличии по меньшей мере одного заранее заданного условия для движения накатом и переход из режима наката в режим привода, если езда накатом продолжалась определенный период времени.
Данный способ имеет преимущество, поскольку при длительном спуске сокращается чрезмерное использование тормозов транспортного средства.
Определенный период времени движения накатом может начинаться, если происходит заранее заданное событие.
Заранее заданным событием может быть точка во времени, когда транспортное средство начинает движение по участку дороги с углом наклона заранее заданной величины.
Определенный период времени движения накатом может быть максимальным временным пределом, и способ может также включать в себя определение момента переключения из режима наката в режим привода путем сравнения времени, прошедшего с начала движения накатом, и максимального временного предела.
Максимальный временной предел может быть заранее заданным временным пределом.
В качестве альтернативы осуществления изобретения максимальный временной предел может быть основан на угле наклона участка дороги, по которому движется транспортное средство.
Угол наклона участка дороги, по которому движется транспортное средство, может быть средним углом наклона участка, преодолеваемого транспортным средством с начала движения накатом.
Максимальный временной предел может быть практически равен нулю, если средний угол наклона больше, чем заранее заданная предельная величина.
Согласно второму аспекту изобретения представлена система управления транспортным средством, включающая в себя устройство для обнаружения заранее заданного условия для начала движения накатом, устройство расцепления приводного соединения между двигателем и линией привода транспортного средства и электронный блок управления для управления устройством расцепления приводного соединения на основании данных, полученных от устройства обнаружения заранее заданного условия для начала движения накатом; причем электронный блок управления выполнен с возможностью управлять устройством расцепления приводного соединения таким образом, чтобы расцеплять приводное соединение, переводя, таким образом, транспортное средство в режим наката, когда электронное процессорное устройство устанавливает наличие по меньшей мере одного заранее заданного условия для начала движения накатом, и восстанавливать приводное соединение, переводя транспортное средство из режима наката в режим привода, если электронный блок управления установил, что движение накатом продолжалось определенный период времени.
Определенный период времени начинается, когда наступает заранее заданное событие.
Заранее заданным событием может быть точка во времени, когда транспортное средство начинает движение по участку дороги с углом наклона заранее заданной величины.
Определенный период времени движения накатом может быть максимальным временным пределом, и система может также содержать таймер, который включается при наступлении заранее заданного события; а электронный блок управления может быть выполнен с возможностью определять момент перехода транспортного средства из режима наката в режим привода путем сопоставления данных от таймера с максимальным временным пределом.
Устройство расцепления приводного соединения между двигателем и линией привода транспортного средства может представлять собой муфту с электронным управлением, используемую для создания приводного соединения между двигателем и трансмиссией.
В качестве альтернативы устройство расцепления приводного соединения между двигателем и линией привода транспортного средства может представлять собой трансмиссию с электронным управлением, а приводное соединения расцепляется путем включения нейтральной передачи трансмиссии.
Согласно третьему аспекту изобретения предлагается транспортное средство, содержащее двигатель, линию привода для передачи крутящего момента от двигателя на одно или несколько ходовых колес, и систему, выполненную в соответствии с вышеизложенным вторым аспектом изобретения.
Краткое описание чертежей
Изобретение будет далее описано посредством примеров со ссылкой на сопроводительные чертежи.
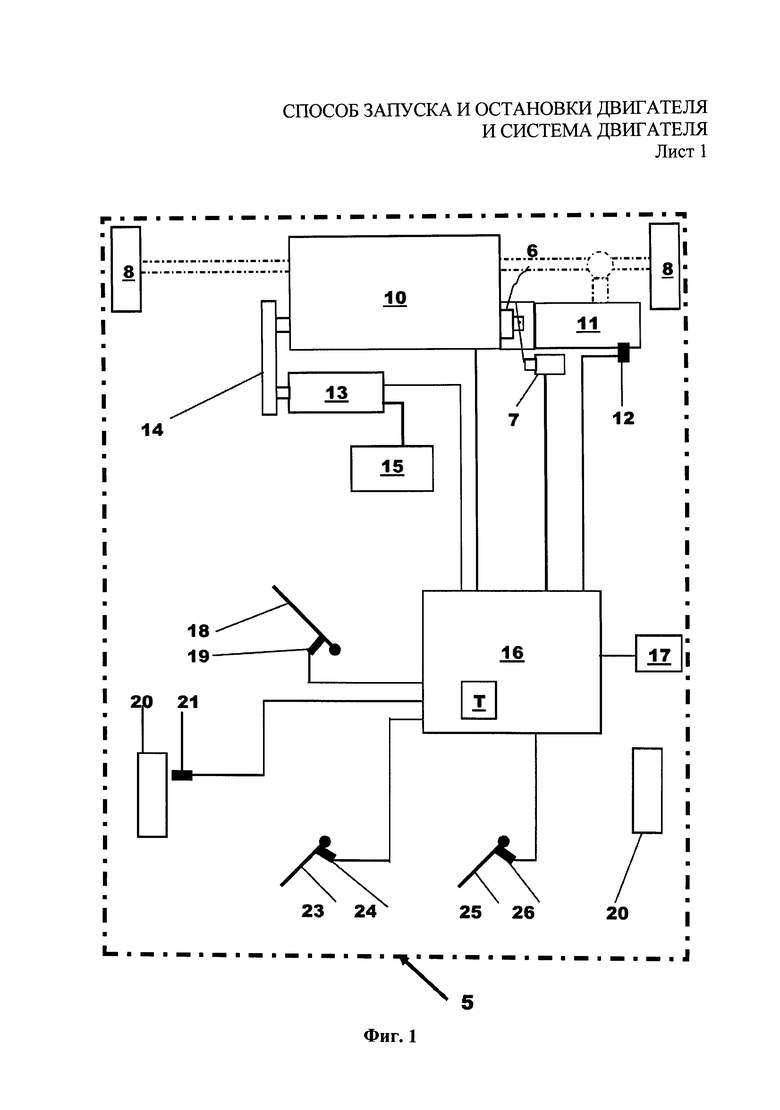
Фиг.1 представляет собой схематическое изображение транспортного средства, содержащего систему согласно второму аспекту изобретения.
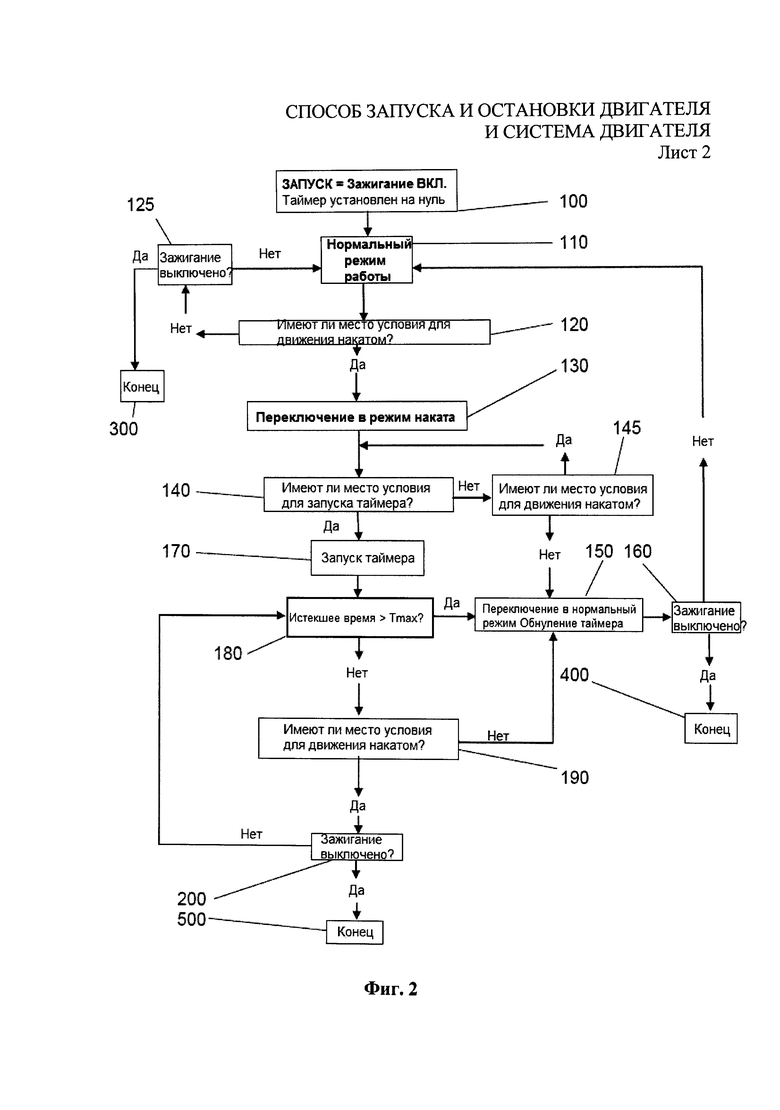
Фиг.2 представляет собой многоуровневую блок-схему, описывающую действия, используемые в способе управления транспортным средством в соответствии с первым аспектом изобретения.
Осуществление изобретения
На Фиг.1 изображено транспортное средство 5, имеющее двигатель 10, приводящий в действие многоступенчатую механическую трансмиссию 11. Трансмиссия 11 имеет приводное соединение с двигателем 10 через муфту 6 сцепления с электронным управлением (Е-clutch), которая включается и отключается вручную водителем транспортного средства 5 в ответ на перемещение педали 25 сцепления и которая также может быть включена и отключена автоматически электронным блоком 15 управления.
Муфта 6 сцепления включается и отключается с помощью приводного механизма 7, управляемого электронным блоком 16, либо в ответ на входные данные с датчика 26 положения педали сцепления, связанного с педалью 25 сцепления, либо автоматически с помощью логической схемы управления, встроенной в электронный блок 16.
Трансмиссия 11 имеет переключатель передач (не показан), который может передвигаться между несколькими положениями, включающими в себя по меньшей мере одну выбранную передачу многоступенчатой трансмиссии 11 и нейтральное положение, при котором не выбрана ни одна передача. Когда переключатель передач перемещен в нейтральное положение многоступенчатой трансмиссии 11, то это понимается как «нейтральное состояние», в котором многоступенчатая трансмиссия 11 не может передавать тяговое усилие через линию привода на два ходовых колеса 8. Когда переключатель передач перемещен в положение одной из передач многоступенчатой трансмиссии 11, то это понимается как «состояние включенной передачи», в котором многоступенчатая трансмиссия 11 может передавать тяговое усилие на два ходовых колеса 8.
Стартер двигателя в виде встроенного стартера-генератора 13 связан с двигателем 10 с возможностью передачи приводного усилия, в данном случае соединен с коленчатым валом двигателя 10 гибким приводом в виде приводного ремня или цепи 14. Стартер-генератор 13 подключен к источнику электрической энергии в виде аккумуляторной батареи 15 и используется для запуска двигателя 10. Стартер-генератор подзаряжает аккумуляторную батарею при его работе в качестве электрогенератора. Изобретение не ограничивается использованием стартера-генератора 13, который может быть заменен стартерным мотором для запуска двигателя 10.
Следует понимать, что при запуске двигателя 10 стартер-генератор 13 приводит в движение коленчатый вал двигателя 10, а в остальное время стартер-генератор сам приводится в движение двигателем 10 для выработки электрической энергии.
Устройство определения угла наклона, способное определить угол наклона участка дороги, по которой движется транспортное средство 5, представлено в виде инклинометра 17. Тем не менее, следует понимать, что для определения угла наклона могут быть использованы другие устройства, такие как, например, топографические навигационные системы на базе GPS. Выходной сигнал от инклинометра 17 передается в электронный блок управления 16 и используется для управления работой транспортного средства 5. В контексте данного описания «положительный угол наклона» обозначает спуск, а «отрицательный угол наклона» обозначает подъем. Следовательно, угол наклона 5% является спуском 5% и угол наклона -2% является подъемом 2%. Используют такие обозначения, поскольку на спусках движение накатом увеличивает скорость транспортного средства 5, а при подъемах движение накатом снижает скорость транспортного средства 5.
Электронный блок 16 управления подключен к стартеру-генератору 13, к двигателю 10, к датчику 12 переключателя передач, который контролирует, включена ли какая-нибудь передача или установлено нейтральное положение трансмиссии 11, к датчику 21 скорости движения, который измеряет угловую скорость одного колеса из пары ведомых ходовых колес 20, к датчику 24 положения педали тормоза, который контролирует положение педали 23 тормоза, к датчику 26 положения педали сцепления, который контролирует положение педали 25 сцепления, и к датчику 19 положения дроссельной заслонки, который контролирует положение педали 18 акселератора. Педаль 18 акселератора обеспечивает управляющее воздействие водителя для получения требуемой выходной мощностью от двигателя 10. Если педаль 18 акселератора переместилась из исходного положения, то можно сказать, что она находится в нажатом положении или нажатом состоянии, а если педаль 18 акселератора остается в исходном положении, то можно сказать, что она находится в нулевом или не нажатом состоянии. Данное условие может быть выражено алгебраически следующим образом.
Если Aposn>Amin = нажатое состояние и если Aposn<Amin = не нажатое или нулевое состояние,
где Aposn - положение педали 18 акселератора, определенное датчиком 19 положения педали акселератора;
Amin - выходной сигнал от датчика 19 положения педали акселератора, практически равный нулю.
Другими словами, если выходной сигнал от датчика 19 положения акселератора ниже заранее заданного уровня Amin, то предполагается, что педаль 18 акселератора не нажата. Допускаются небольшие неточности в калибровке, которые, в противном случае, не позволят обнаружить то, что педаль 18 акселератора не нажата. Другими словами, на практике выходной сигнал датчика 19 педали акселератора может никогда не достигнуть нулевого значения, даже если водитель не нажимает педаль 18 акселератора. Кроме того, если абсолютное нулевое значение используется в качестве тестового значения для ненажатой педали 18 акселератора, то сигнал, поданный датчиком 19 педали акселератора на электронный блок 16 управления, может быть интерпретирован электронным блоком 16 как указание на то, что педаль 18 акселератора не находится в нажатом положении.
Следует понимать, что термин «датчик переключателя передач» не ограничивается датчиком для контроля положения переключателя передач, но определяет любое устройство, которое может обеспечить обратную связь о состоянии трансмиссии 11 (состояние включенной передачи или состояние нейтральной передачи).
Аналогичным образом, термин «датчик педали тормоза» не ограничивается датчиком контроля положения педали тормоза, но определяет любое устройство, которое может выдать ответный сигнал о том, задействовал ли водитель транспортного средства 5 педаль 23 тормоза с целью приведения в действие фрикционных тормозов (не показаны) транспортного средства 5. Например, датчик педали тормоза может контролировать давление жидкости в одной или нескольких тормозных магистралях. Если педаль 23 тормоза нажата в достаточной степени для приведения в действие тормозной системы, то она находится в нажатом состоянии или нажатом положении.
Если нажата педаль 25 сцепления, то она находится в «нажатом состоянии», и муфта 6 сцепления отключена. Если педаль сцепления не нажата, то педаль находится в «ненажатом состоянии», и муфта 6 сцепления включена. Если педаль 25 сцепления находится в «нажатом состоянии», то сигнал с датчика 26 педали сцепления указывает электронному блоку 16 управления, что водитель желает отключить муфту 6 сцепления, что достигается с помощью управляющего сигнала, посылаемого от электронного блока 16 на исполнительный механизм 7. Если педаль 25 сцепления находится в «ненажатом состоянии», то сигнал с датчика 26 педали сцепления указывает электронному блоку 16 управления, что водитель желает включить муфту 6 сцепления, что достигается с помощью управляющего сигнала, посылаемого от электронного блока 16 на исполнительный механизм 7. Следовательно, ручное включение и выключение муфты 6 сцепления достигается путем нажатия водителем на педаль 25 сцепления традиционным способом, но движение педали 25 сцепления, управляющей муфтой 6 сцепления посредством вспомогательного гидропривода, достигается с помощью электронного блока 16 управления и исполнительного механизма 7.
Электронный блок 16 управления состоит из различных компонентов, в том числе центрального процессорного устройства, запоминающих устройств, таймеров, к которым относится таймер «Т» времени наработки, и устройств обработки сигналов для преобразования сигналов от датчиков, подключенных к электронному блоку 16 управления, в данные, используемые электронным блоком 16 для управления работой транспортного средства 5.
Электронный блок управления 16 использует сигналы, полученные от различных датчиков, для управления работой транспортного средства 5.
Электронный блок 16 управляет работой транспортного средства 5, то есть обеспечивает работу в двух режимах.
В нормальном режиме или режиме привода двигатель 10 соединен с ведомыми ходовыми колесами 8 с возможностью передачи приводного усилия так, что крутящий момент может быть передан от двигателя 10 на ходовые колеса 8 посредством трансмиссии 11 и других компонентов линии привода, таких как, например, карданные валы и дифференциал;
крутящий момент может быть также передан от ведомых ходовых колес 8 назад на двигатель 10, если двигатель 10 находится в состоянии холостого хода для того, чтобы обеспечить торможение двигателем транспортного средства 5. В режиме привода муфта 6 сцепления включена, трансмиссия 11 находится в состоянии включенной передачи.
В режиме наката крутящий момент не может быть передан как от двигателя 10 на ведомые ходовые колеса 8, так и от ходовых колес 8 на двигатель 10. В режиме наката муфта 6 сцепления инклинометра отключена, но трансмиссия 11 в данном варианте осуществления изобретения находится в состоянии включенной передачи.
Работа системы управления осуществляется следующим образом: если транспортное средство 5 работает в нормальном режиме и водитель нажимает педаль 18 акселератора, электронный блок 16 управления получает соответствующий сигнал от датчика 19 педали акселератора, запрашивающий крутящий момент от двигателя 10, и транспортное средство 5 работает в режиме привода.
Однако если водитель отпускает педаль 18 акселератора, сигнал от датчика 19 положения педали акселератора показывает, что крутящего момента, подающегося от двигателя 10, не требуется. Практически нулевое значение сигнала о положении педали акселератора является в данном варианте осуществления изобретения пусковым сигналом или заранее заданным условием начала движения накатом, которое указывает на возможность переключения в режим наката. Тем не менее, перед тем, как переключить транспортное средство из режима привода в режим наката, электронный блок 16 управления проверяет, имеют ли место два других условия, необходимые для движения накатом.
Первым из дополнительных заранее заданных условий начала движения накатом является такое значение текущей скорости «V» транспортного средства, которое больше заранее заданного значения минимальной скорости Vmin, которое в данном варианте составляет 10 км/ч. Вторым заранее заданным условием начала движения накатом является такое значение скорости транспортного средства, которое меньше заранее заданного значения максимальной скорости Vmax, которое в данном варианте составляет 60 км/ч.
Для определения режима работы транспортного средства 5 электронный блок 16 управления использует следующую логическую схему.
Если (Aposn<Amin) И (Vmin<V<Vmax), то выбирается режим наката.
ИНАЧЕ
выбирается режим привода.
Следовательно, если Aposn меньше Amin, и значение скорости V транспортного средства находится в заранее заданном диапазоне допустимой скорости между Vmin и Vmax, режим работы транспортного средства 5 будет изменен с режима привода на режим наката, если транспортное средство в данный момент работает в режиме привода и если данные условия не соблюдаются, транспортное средство либо останется режиме тяги, либо, если оно в данный момент находится в режиме наката, будет переведено в режим привода.
В режиме наката электронный блок 16 управления отключает муфту 6 сцепления с помощью исполнительного механизма 7 и, следовательно, крутящий момент не может передаваться через муфту 6 сцепления ни в одном направлении.
В некоторых вариантах осуществления изобретения двигатель 10 остается в рабочем состоянии и, следовательно, используется такой вид наката, как дрейф. В других вариантах осуществления изобретения электронный блок 16 управления останавливает двигатель 10 либо напрямую, либо с помощью одного или нескольких других контроллеров, таких как, например, старт-стопный контроллер, и, следовательно, используется свободное качение.
После начала работы в режиме наката транспортное средство 5 остается в данном режиме до тех пор, пока либо одно или несколько заранее заданных условий для движения накатом не перестанет соблюдаться, либо не истечет определенный период времени, который следует за наступлением заранее заданного события.
В описываемом варианте осуществления изобретения заранее заданным событием является определение электронным блоком 16 управления момента, когда транспортное средство 5 начинает двигаться по участку дороги с углом наклона заранее заданной величины. В данном случае заранее заданной величиной является спуск 3%, следовательно, как только электронный блок 16 управления получает сигнал от инклинометра о том, что угол наклона составляет 3%, запускается таймер «Т».
Далее электронный блок 16 управления периодически через короткие промежутки времени (10 мс) проверяет, не достигло ли текущее значение таймера максимального временного предела Tmax. Временным пределом Tmax является максимальный период времени, в течение которого продолжается движение накатом на спуске, с целью предотвращения чрезмерного использования тормозов транспортного средства 5. В одном варианте осуществления изобретения был установлен временной предел в 30 секунд.
Если текущее значение таймера «Т» меньше, чем Tmax, то движение накатом будет продолжено в том случае, если сохраняется соблюдение первоначальных условий для движения накатом. Другими словами, если водитель нажимает педаль 18 акселератора или скорость транспортного средства 5 либо превышает верхний предел значения скорости У max, либо уменьшается до уровня ниже нижнего предела значения скорости Vmin, то электронный блок 16 управления путем включения муфты 6 сцепления автоматически переводит транспортное средство в режим привода.
Когда значение таймера «Т» достигает значения, равного или большего Tmax, движение накатом прекращается, и электронный блок 16 управления путем включения муфты 6 сцепления переключает транспортное средство 5 из режима наката в режим привода.
В качестве альтернативы вышеизложенному варианту воплощения, временным пределом Tmax является непостоянный временной предел, основанный на среднем угле наклона, следовательно, если средний угол наклона увеличивается, временной предел Tmax уменьшается. Это выполняется таким образом, что если средний угол наклона превышает предельный угол, то временной предел уменьшается до нуля, тем самым прерывая режим движения накатом.
Таблица 1, приведенная ниже, содержит данные о среднем угле наклона спуска (%) в зависимости от значений временного предела Tmax.
На Фиг.2 показаны основные этапы способа по изобретению, которые могут выполняться электронным блоком 16 управления.
Способ начинается на этапе 100 с запуска зажигания транспортного средства 5 и сброса значения таймера «Т» на ноль.
Далее способ переходит на этап 110, где используется нормальный режим работы или режим привода. Далее способ переходит на этап 120, где определяется, имеют ли место условия для начала движения накатом. Другими словами, определяется, находится ли значение скорости транспортного средства в пределах заранее заданного диапазона скоростей, и находится ли педаль акселератора в ненажатом состоянии. Если оба условия не соблюдаются, то способ переходит на этап 125, где проверяется, было ли выключено зажигание. Если зажигание было выключено, то способ заканчивается на этапе 300, если же зажигание не было выключено, то способ возвращается на этап 110.
Если на этапе 120 выполняются условия для начала движения накатом, режим работы транспортного средства 5 переключается с режима привода на режим наката путем отключения муфты 6 сцепления, как отмечено в блоке 130. Далее, на этапе 140 определяется, выполняются ли условия для запуска таймера «Т». С точки зрения целей настоящего примера угол наклона участка дороги, по которому движется транспортное средство 5, используется в качестве начального условия. Не рекомендуется автоматически запускать таймер «Т» сразу после перехода транспортного средства 5 в режим наката, т.к. транспортное средство 5 может перейти в режим наката на ровной дороге или на подъеме. В таких обстоятельствах не будет необходимости ограничивать время наката, поскольку риск потери управления, требующего повышенного использования тормозов транспортного средства 5, будет отсутствовать. Следовательно, если запуск таймера «Т» производится только в случае обнаружения спуска, то установление временного предела обеспечит необходимую безопасность и позволит уменьшить вероятность нежелательных переключений в режим наката и из него.
Величина угла наклона спуска, необходимая для подачи сигнала на включение таймера «Т», может быть небольшой, например 2%, или может быть большей, выбранной таким образом, что верхнее предельное значение скорости Vmax не будет достигнуто в течение заранее заданного периода времени, который может соответствовать или не соответствовать максимальному периоду времени наката Tmax.
Если соблюдаются условия для запуска таймера «Т», то способ переходит на этап 145. На этапе 145, если имеют место условия для начала движения накатом, то способ возвращается на этап 140, но, если условия для движения накатом больше не выполняются, то способ переходит на этап 150. Другими словами, если водитель нажимает педаль 18 акселератора, или скорость транспортного средства выходит за пределы диапазона допустимой скорости, способ переходит на этап 150, где данные таймера сбрасываются, и транспортное средство снова переходит в нормальный режим работы или режим привода, как указано в блоке 110. После этапа 150 способ переходит на этап 110 через этап 160, где проверяется, было ли выключено зажигание. Если зажигание не было выключено, то способ возвращается на этап 110, если зажигание было выключено, то способ заканчивается на этапе 400.
Следует понимать, что проверка выключения зажигания может быть также включена в цепочку действий от этапа 145 до этапа 140 таким образом, что, если зажигание было выключено, способ заканчивается вместо того, чтобы вернуться от этапа 145 на этап 140.
На этапе 140, если имеют место условия для запуска таймера, способ переходит на этап 170, где таймер «Т» запускается, затем способ переходит на этап 180, где текущее значение таймера «Т» сравнивается с временным пределом Tmax, который является максимально допустимым периодом времени наката.
Tmax может представлять собой заранее заданное значение или же непостоянное значение, основанное на угле наклона участка дороги, по которому движется транспортное средство 5. В одном случае значение Tmax изменяется в зависимости от скользящего среднего угла наклона после запуска таймера «Т», при этом значение Tmax увеличивается, когда скользящее среднее падает, и уменьшается, когда скользящее среднее повышается.
Если значение таймера «Т» равняется или превышает значение Tmax, то способ переходит на этап 150, где данные таймера сбрасываются, и транспортное средство снова переключается в нормальный режим работы или режим привода, как отмечено в блоке 110. Как и в вышеизложенном примере, с этапа 150 способ переходит на этап 110 через этап 160, где проверяется, было ли выключено зажигание. Если зажигание не было выключено, то способ возвращается на этап 110, а если зажигание было выключено, то способ заканчивается на этапе 400.
На этапе 180, если текущее значение таймера «Т» меньше, чем Tmax, то способ переходит на этап 190, где повторно проверяется наличие условий для движения накатом. Если на этапе 190 педаль 18 акселератора остается в ненажатом или нулевом состоянии, а значение текущей скорости транспортного средства 5 не выходит за пределы заранее заданного диапазона допустимой скорости, то способ переходит с этапа 190 на этап 200, в противном случае способ переходит на этап 150, сущность которого была изложена выше.
На этапе 200 проверяется, было ли выключено зажигание. Если зажигание не было выключено, то способ возвращается на этап 180 для повторного сравнения значения таймера с временным пределом Tmax, a если зажигание было выключено, то способ заканчивается на этапе 500.
Следовательно, если временной предел Tmax достигнут, то движение накатом прекращается путем включения муфты 6 сцепления, и транспортное средство 5 переходит в режим привода, но до тех пор, пока значение таймера «Т» остается ниже значения Tmax, движение накатом может быть продолжено, если только оно не прекращено из-за нарушения других условий движения накатом.
Поскольку не задано верхнего предела угла наклона для разрешения движения накатом, транспортное средство 5 может использовать накат, даже когда оно перемещается по холмистой дороге, на которой один или несколько спусков могут быть крутыми, при условии, что крутые спуски непродолжительны. Следует понимать, что при преодолении крутого спуска скорость транспортного средства 5 быстро возрастает и что в этом случае верхний предел скорости Vmax может быть превышен еще до того, как допустимое время наката Tmax истекло, и режим наката отключается в целях безопасности.
Кроме того, при длительном спуске допускается работа в режиме наката в течение значительного периода времени для того, чтобы повысить экономию топлива при движении накатом, но затем при превышении временного предела Tmax или верхнего предела скорости Vmax режим наката отключается с целью предотвращения чрезмерного использования тормозов транспортного средства 5.
Несмотря на то что на Фиг.2 не показано, в способ могут быть включены различные устройства для предотвращения ненужного повторного переключения в режим наката после того, как он был отключен на этапе 150. Например, может иметь место задержка сбрасывания данных таймера «Т» для того, чтобы, если после этапа 150 способ переходит с этапа 110 через этапы 120, 130 и 140 на этап 170, таймер «Т» мог продолжить отсчет времени и, таким образом, не будет затрачено время на проверку на этапе 180. Данный цикл событий будет продолжаться до тех пор, пока таймер «Т» не прекратит отсчет и не обнулится после окончания задержки.
Для предотвращения ненужного повторного переключения в режим наката могут быть использованы другие устройства. Например, педаль 18 акселератора может быть нажата и отпущена до того, как режим наката будет снова доступен, или же тормозная система транспортного средства 5 может не действовать в течение периода времени, следующего за моментом переключения в режим привода.
Несмотря на то, что изобретение было описано применительно к механической трансмиссии, использующей муфту сцепления с электронным управлением, следует понимать, что оно может быть также использовано на транспортных средствах с другими конструкциями трансмиссии.
Например, для трансмиссии с двумя муфтами сцепления (одна для четных передач, другая для нечетных передач) для переключения в режим наката может быть отключена муфта сцепления, соответствующая включенной в данный момент передаче.
В случае применения изобретения в транспортных средствах с полностью автоматической трансмиссией, переход в режим наката происходит за счет включения «нейтрального положения рычага» трансмиссии.
Следует понимать, что условия для начала движения накатом, описанные выше, являются по своей природе иллюстративными и что могут быть либо добавлены дополнительные условия, либо указанные условия могут быть заменены одним или несколькими условиями, среди которых нет условия временного предела. Например, накат может быть запрещен, если угол наклона подъема, который преодолевает транспортное средство, больше заранее заданного угла наклона. Подобное ограничение угла подъема может быть также использовано для прекращения движения накатом таким образом, что если во время движения накатом неожиданно начинается крутой подъем, то режим наката отключается. Это достигается использованием нулевого значения для Tmax в том случае, если угол наклона подъема больше, чем заранее заданное значение.
Например, если угол наклона больше - 4%, то установленное значение Tmax=0.
Следовательно, если угол наклона составляет - 5% (подъем 5%), то Tmax будет установлено на ноль.
Специалистам в данной области техники понятно, что несмотря на то, что изобретение было описано на примере со ссылкой на несколько предпочтительных вариантов осуществления изобретения, оно не ограничивается указанными вариантами, и возможны различные их модификации без выхода за рамки сущности изобретения.
Изобретение применяют при управлении движением накатом транспортного средства. При управлении движением транспортного средства, используют режим движения накатом при наличии по меньшей мере одного заранее заданного условия для движения накатом. Осуществляют переход из режима движения накатом в режим привода, если движение накатом продолжалось в течение определенного периода времени. При этом определенный период времени начинается при наступлении заранее заданного события. Причем заранее заданным событием является момент времени, когда транспортное средство начинает движение по участку дороги с углом наклона заранее заданной величины. Предложены также система управления транспортным средством и транспортное средство. Достигается сокращение потребления топлива, уменьшение вредных выбросов двигателя, предотвращается чрезмерный износ, перегрев тормозов. 3 н. и 8 з.п. ф-лы, 2 ил., 1 табл. 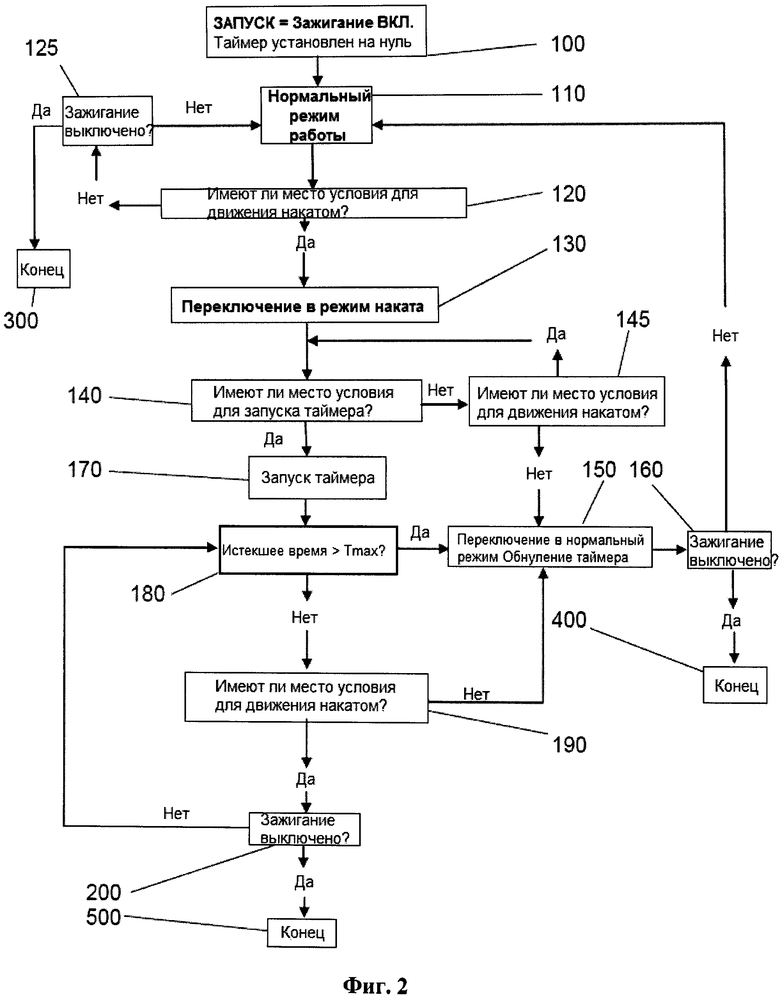
1. Способ управления транспортным средством, при котором:
используют режим движения накатом при наличии по меньшей мере одного заранее заданного условия для движения накатом и
осуществляют переход из режима движения накатом в режим привода, если движение накатом продолжалось в течение определенного периода времени,
при этом определенный период времени начинается при наступлении заранее заданного события,
причем заранее заданным событием является момент времени, когда транспортное средство начинает движение по участку дороги с углом наклона заранее заданной величины.
2. Способ по п. 1, при котором определенный период времени является максимальным временным пределом, причем дополнительно определяют момент перехода из режима движения накатом в режим привода путем сравнения времени, прошедшего с начала движения накатом, с максимальным временным пределом.
3. Способ по п. 2, при котором максимальный временной предел представляет собой заранее заданный временной предел.
4. Способ по п. 2, при котором максимальный временной предел зависит от угла наклона участка дороги, по которому движется транспортное средство.
5. Способ по п. 4, при котором угол наклона участка дороги, по которому движется транспортное средство, представляет собой средний угол наклона участка, по которому движется транспортное средство с момента наступления заданного события.
6. Способ по п. 5, при котором максимальный временной предел по существу равен нулю, если средний угол наклона представляет собой спуск с углом большим, чем заранее заданное предельное значение.
7. Система управления транспортным средством, содержащая:
устройство для обнаружения наличия заранее заданного условия для движения накатом,
устройство расцепления приводного соединения между двигателем и линией привода транспортного средства и
электронный блок управления для управления устройством расцепления приводного соединения на основе данных, полученных от устройства для обнаружения наличия заранее заданного условия для движения накатом;
причем электронный блок управления выполнен с возможностью управления устройством расцепления приводного соединения таким образом, чтобы расцеплять приводное соединение, переводя транспортное средство в режим движения накатом, когда электронное процессорное устройство устанавливает наличие по меньшей мере одного заранее заданного условия для движения накатом, и восстанавливать приводное соединение, переводя транспортное средство из режима движения накатом в режим привода, когда электронный блок управления устанавливает, что движение накатом продолжалось в течение определенного периода времени,
при этом определенный период времени начинается при наступлении заранее заданного события,
причем заранее заданным событием является момент времени, когда транспортное средство начинает движение по участку дороги с углом наклона заранее заданной величины.
8. Система по п. 7, в которой определенный период времени является максимальным временным пределом, причем система дополнительно содержит таймер, который выполнен с возможностью запуска при наступлении заранее заданного события, а электронный блок управления выполнен с возможностью определения момента перехода из режима движения накатом в режим привода путем сравнения данных, полученных от таймера, с максимальным временным пределом.
9. Система по п. 7 или 8, в которой устройство для расцепления приводного соединения между двигателем и линией привода транспортного средства представляет собой муфту сцепления с электронным управлением, используемую для осуществления приводного соединения между двигателем и трансмиссией.
10. Система по п. 7 или 8, в которой устройство для расцепления приводного соединения между двигателем и линией привода транспортного средства представляет собой трансмиссию с электронным управлением, причем расцепление приводного соединения осуществляется путем переключения рычага передач трансмиссии в нейтральное положение.
11. Транспортное средство, содержащее двигатель, линию привода для передачи крутящего момента от двигателя на одно или более ходовых колес, а также систему по любому из пп. 7-10.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| DE102009055832A1, 01.06.2011 | |||
| СИГАРЕТНАЯ ПАЧКА | 2019 |
|
RU2727789C1 |

