ТЕХНИЧЕСКАЯ ОБЛАСТЬ
Настоящее изобретение относится к области систем контроля оборудования, такого как двигатель, и в частности, к системе контроля узла компонентов двигателя летательного аппарата.
СОСТОЯНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Контроль двигателя и, в частности, двигателя летательного аппарата очень важен для нормального функционирования двигателя. Используются различные устройства контроля или обнаружения неисправностей, чтобы убедиться в нормальном функционировании различных компонентов двигателя. Существует, например, устройство контроля для анализа характеристики процесса зажигания; другое для анализа траектории газов, еще один для обнаружения засорения фильтров, а другой для анализа расхода масла, и т.д.
Все эти устройства обнаружения и контроля позволяют повысить безопасность и надежность двигателя летательного аппарата. В частности, они позволяют избежать или ограничить остановку двигателя во время полета (in-flight shutdown IFSD), уменьшить задержки или отмены рейсов (delays and cancellations D&C), и в частности, облегчают техническое обслуживание двигателя, предвосхищая отказы и определяя поврежденные или неисправные компоненты.
Разные устройства обнаружения используют различные входные данные и могут быть сконфигурированы по-разному в зависимости от типов дефектов, которые желают обнаружить. Действительно, не обязательно наблюдают одни и те же параметры среди наблюдаемых компонентов или узлов компонентов. Также в зависимости от типов дефектов, которые стараются обнаружить, не измеряют одни и те же физические величины.
Результаты, полученные этими устройствами обнаружения, относящиеся к двигателю, являются вероятностями или рисками неисправностей, связанными с информацией о точности. Учитывая, что все компоненты двигателя взаимосвязаны, устройства обнаружения производят много информации единовременно и необходимо иметь возможность сделать сортировку, чтобы помочь операторам технического обслуживания принять решение о замене двигателя или о его ремонте.
Однако это требует огромное время на анализ и кроме того, трудно для экспертов использовать все данные, которые могут иметь отношение к контролю двигателя.
Кроме того, большая частота обнаружения порождает большое количество ложных срабатываний. Таким образом, наблюдается двойственность между возможностью иметь сниженную частоту ложных срабатываний и хорошим обнаружением. Уменьшение частоты ложных срабатываний неизбежно снизит частоту обнаружений. Однако частота ложных срабатываний очень важна для применения контроля. Действительно, если устройство определения ошибочно побуждает к дорогостоящей операции технического обслуживания, это устройство обнаружения потеряет всякое доверие. Более того, в авиационной области, конструкция оборудования чрезвычайно надежна, что, как правило, в значительной степени ограничивает частоту выхода из строя и, следовательно, увеличивает риск ложных срабатываний.
Задачей настоящего изобретения является создание системы контроля узла компонентов двигателя, позволяющей помочь операторам технического обслуживания принять решение при увеличении частоты обнаружения и без увеличения частоты ложных срабатываний.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение может быть использовано на любом оборудовании. Таким образом, оно определяется системой контроля узла компонентов оборудования, такого как двигатель, включающей в себя:
- средства обнаружения, содержащие совокупность агентов обнаружения неисправностей, каждый из указанных агентов сконфигурирован с возможностью получать измерения физических параметров, относящихся к подузлу компонентов оборудования, такого как двигатель, и выдавать начальное распределение вероятности неисправности,
- средства сбора, сконфигурированные для получения информации обратной связи на основе опыта, а также начальных распределений вероятности неисправности, полученных от указанной совокупности агентов,
- средства появления, сконфигурированные с возможностью обеспечения итеративного появления текущих распределений вероятности неисправности в точном соответствии с указанной информацией обратной связи на основе опыта, указанные текущие распределения вероятности неисправности сходятся к совокупности оптимальных распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта, и
- средства синтеза, сконфигурированные с возможностью синтеза оптимальных распределений вероятности неисправности относящихся, по меньшей мере, к одному интересующему подузлу компонентов оборудования, такому как двигатель, для извлечения рисков неисправности характерной для указанного интересующего подузла.
Таким образом, система контроля позволяет значительно увеличить частоту обнаружения при сохранении низкой частоты ложных срабатываний и позволяет сортировать результаты для того, чтобы сосредоточиться на рисках неисправности, имеющей отношение к конкретному подузлу компонентов оборудования, такого как двигатель. Таким образом, система позволяет определить элементы, представляющие наибольший риск и, следовательно, облегчает распознавание и принятие решения с точки зрения технического обслуживания касающегося наблюдаемого подузла,
Главным образом, средства появления включают в себя:
- средства объединения, сконфигурированные с возможностью создания каждого текущего или оптимального распределения вероятности неисправности путем объединения предыдущих распределений вероятности неисправности согласно заданным правилам объединения,
- средства оптимизации, сконфигурированные с возможностью приведения в точное соответствие каждого начального или текущего распределения неисправности с информацией обратной связи на основе опыта, которая ему соответствует, для того, чтобы связать с ним значение эффективности, и
- средства управления, сконфигурированные для изменения совокупности агентов к оптимальной популяции агентов, создавая новые агенты, соответствующие текущим и оптимальным распределениям вероятности неисправности и выбирая агенты наиболее согласованные с информацией обратной связи на основе опыта по значениям эффективности, связанным с указанными текущими и оптимальными распределениями вероятности неисправности.
Это позволяет динамически регулировать агенты обнаружения неисправности и обеспечивать появление агентов, которые постоянно адаптируются к самым интересным событиям.
Преимущественным образом, средства появления дополнительно сконфигурированы с возможностью связывания с каждым начальным, текущим или оптимальным распределением вероятности неисправности, относящимся к подузлу компонентов оборудования, такому как двигатель, вектора импликации, отражающего вклад каждого элемента указанного подузла на соответствующее распределение вероятности неисправности.
Это позволяет эффективно связывать вероятности неисправности с разными элементами оборудования, такого как двигатель.
Преимущественным образом, средства синтеза сконфигурированы с возможностью синтезировать оптимальные распределения вероятности неисправности, относящиеся к указанному интересующему подузлу, путем взвешивания влияния каждого элемента указанного интересующего подузла согласно соответствующим векторам импликации.
Преимущественным образом, предопределенные правила объединения могут быть выбраны среди следующих правил: экспертные правила, правила сокращения, правила голосования, бизнес-правила, байесовы правила, и правила нечеткой логики.
Это позволяет комбинировать различные источники информации, улучшая, таким образом, надежность контроля.
Преимущественным образом, средства оптимизации дополнительно сконфигурированы с возможностью регулировать правила объединения в зависимости от информации обратной связи на основе опыта.
Преимущественным образом, совокупность агентов или оптимальная популяция агентов сформирована экземплярами алгоритмов, включающими в себя выбор различных измерений или различных методов обработки, или различных выборов параметров.
Преимущественным образом, начальные распределения вероятности неисправности стандартизированы относительно контекста измерений.
Преимущественным образом, система контроля включает в себя средства помощи решению, которые позволяют определить операции технического обслуживания в зависимости от рисков неисправности.
Преимущественным образом, указанное оборудование является двигателем и, в частности, двигателя летательного аппарата.
Изобретение также предоставляет способ контроля узла компонентов оборудования, такого как двигатель, содержащий этапы, на которых:
- собирают информацию обратной связи на основе опыта, а также начальные распределения вероятности неисправности, полученные от совокупности агентов обнаружения неисправностей, каждый из указанных агентов сконфигурирован с возможностью получать измерения физических параметров, относящихся к подузлу компонентов оборудования, такого как двигатель, перед выдачей начального распределения вероятности неисправности,
- итеративно обеспечивают появление текущих распределений вероятности неисправности в точном соответствии с указанной информацией обратной связи на основе опыта, при этом указанные текущие распределения вероятности неисправности сходятся к совокупности оптимальных распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта, и
- синтезируют оптимальные распределения вероятности неисправности, относящиеся к, по меньшей мере, одному интересующему подузлу компонентов оборудования, такого как двигатель, для того, чтобы извлечь риски неисправности, характерной для интересующего подузла.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 схематически показывает способ контроля узла компонентов оборудования, такого как двигатель, в соответствии с изобретением;
Фиг. 2 схематически показывает систему контроля узла компонентов оборудования, такого как двигатель, в соответствии с изобретением;
Фиг. 3А-3D схематически показывают примеры объединения в системе контроля узла компонентов оборудования, такого как двигатель летательного аппарата, в соответствии с изобретением; и
Фиг. 4 схематически показывает конкретный пример синтеза в соответствии с системой контроля настоящего изобретения.
ДЕТАЛЬНОЕ ОПИСАНИЕ КОНКРЕТНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Принцип изобретения - объединить различные источники обнаружения неисправностей на оборудовании, таком как двигатель, для обеспечения автоматического и оптимизированного появления информации, различимой и полезной для принятия решений по операциям технического обслуживания оборудования.
Фиг. 1 схематически показывает способ контроля узла компонентов оборудования, такого как двигатель, в соответствии с изобретением.
Настоящее изобретение может быть расширено на все оборудование, в частности на оборудование летательного аппарата. Под «оборудованием» подразумевается двигатель, в частности двигатель летательного аппарата, система анализа способности к запуску, в частности система летательного аппарата, средство подтверждения диагностики, встроенная система анализа вибраций, система контроля подшипников, система идентификации задач (workscopes(объема работ)) двигателя во время прибытия в мастерскую, система автоматической идентификации причин уведомлений CNR (Customer Notification Report (Отчет Уведомления Клиента)), система исправления неисправностей (troubleshooting), и т.д.
Для краткости, далее будем использовать выражение «узел компонентов оборудования» для обозначения оборудования в целом или системы оборудования, включающей в себя несколько компонентов и, в частности, используем выражение «узел компонентов двигателя» для обозначения двигателя в целом или системы двигателя, включающей в себя несколько компонентов. Также используем термин, «подузел компонентов оборудования» для обозначения подсистемы оборудования, включающей в себя один или несколько компонентов и, в частности, используем выражение «подузел компонентов двигателя» для подсистемы двигателя, включающей в себя один или несколько компонентов двигателя.
Способ контроля в соответствии с изобретением, применяет блок рассуждений, который динамически и авто-адаптивно объединяет информацию от совокупности детекторов неисправности, и который затем сортирует и синтезирует объединенную информацию.
Этап Е1 относится к получению измерений χ(ω) во время опыта ω∈Ω физических параметров, связанных с подузлом компонентов оборудования, такого как двигатель.
Этап Е2 касается определения совокупности алгоритмических агентов  обнаружения неисправностей, каждый из агентов сконфигурирован для получения измерений физических параметров для расчета начального распределения вероятности неисправности.
обнаружения неисправностей, каждый из агентов сконфигурирован для получения измерений физических параметров для расчета начального распределения вероятности неисправности.
На этапе Е3, совокупность алгоритмических агентов выдает набор начальных распределений  вероятности неисправности.
вероятности неисправности.
Этап Е4 касается получения информации Re обратной связи на основе опыта об ошибках.
Этап Е5 касается использования информации обратной связи на основе опыта так же, как и начальных распределений вероятности неисправности, полученных от совокупности агентов обнаружения неисправности для обеспечения появления текущих распределений вероятности неисправности в точном соответствии с информацией обратной связи на основе опыта.
Текущее распределение вероятности неисправности создается итеративно до тех пор, пока они сойдутся на этапе Е6 к совокупности оптимальных распределений  вероятности неисправности в соответствии с информацией обратной связи на основе опыта.
вероятности неисправности в соответствии с информацией обратной связи на основе опыта.
На этапе Е7, оптимальные распределения вероятности неисправности относящиеся к, по меньшей мере, одному интересующему подузлу компонентов оборудования, такого как двигатель, синтезируются для того, чтобы извлечь риски неисправности, характерные для этого интересующего подузла.
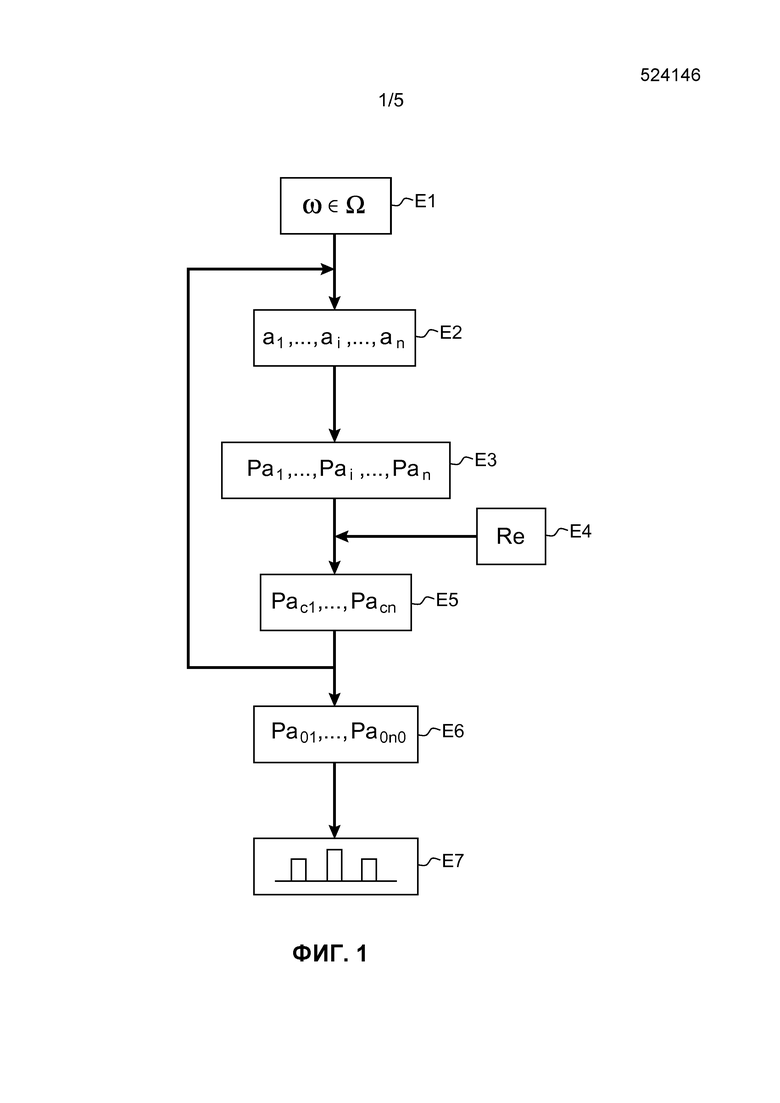
Фиг. 2 схематически показывает систему контроля узла компонентов оборудования, такого как двигатель, в соответствии с изобретением.
Эта система 1 контроля содержит средства 2 обнаружения, средства 3 сбора, средства 5 появления, и средства 7 синтеза.
Следует отметить, что в случае двигателя летательного аппарата, средства 2 обнаружения могут быть частично или полностью интегрированы с бортовым компьютером контроля двигателя. Более того, средства 3 сбора, средства 5 появления и средства 7 синтеза - цифровые модули, которые могут быть интегрированы с тем же самым или другими компьютерами или информационными системами 9а, 9b.
Средства обнаружения 2 включают в себя совокупность алгоритмических агентов a1,..., ai,..., an обнаружения неисправностей, которые сконфигурированы для того чтобы получать измерения физических величин связанных с подузлом компонентов двигателя и для того, чтобы поставлять начальные распределения вероятности неисправности.
Агент  обнаружения неисправностей включает в себя алгоритмические функции. Эти функции включают в себя, например, функцию инициализации состояния агента, другую для выполнения калибровки, другие функции для получения данных и выполнения алгоритма и еще другие для выдачи результатов. Агенты обнаружения неисправностей, как правило, подвергаются фазе обучения, включающей процедуру калибровки. Агенты могут быть запущены средствами обработки вычислительного устройства или компьютера, когда это необходимо. Агенты обнаружения неисправностей сконфигурированы для сбора измерений полученных датчиками на двигателе 13 и его окружении. В частности, эти данные могут быть получены непосредственно от двигателя 13 (пунктирная стрела) или на основании опыта ω∈Ω измерений полученного из базы данных 15.
обнаружения неисправностей включает в себя алгоритмические функции. Эти функции включают в себя, например, функцию инициализации состояния агента, другую для выполнения калибровки, другие функции для получения данных и выполнения алгоритма и еще другие для выдачи результатов. Агенты обнаружения неисправностей, как правило, подвергаются фазе обучения, включающей процедуру калибровки. Агенты могут быть запущены средствами обработки вычислительного устройства или компьютера, когда это необходимо. Агенты обнаружения неисправностей сконфигурированы для сбора измерений полученных датчиками на двигателе 13 и его окружении. В частности, эти данные могут быть получены непосредственно от двигателя 13 (пунктирная стрела) или на основании опыта ω∈Ω измерений полученного из базы данных 15.
Затем агент на основании этих измерений вычисляет показатели специфичные для компонентов двигателя 13 или для логических элементов, указывающих на конкретную задачу целого ряда компонентов двигателя 13. Например, показатель может соответствовать времени необходимому для достижения валом двигателя максимального ускорения после каждого запуска двигателя, другой показатель может быть градиентом температуры выхлопных газов двигателя, и т.д.
Однако каждое измерение может быть собрано в конкретных внешних или внутренних условиях. Эти условия, которые могут иметь воздействие на считывание показателей, могут быть измерены и записаны как экзогенные данные. Внешние условия могут включать в себя температуру и внешнее давление, влажность и т.д. Внутренние условия могут касаться конкретного использования двигателя, например, температура масла, непосредственно перед запуском двигателя, может быть рассмотрена как данные контекста, которые различают два типа пусков (холодный запуск и горячий запуск).
Таким образом, эти показатели преимущественно стандартизированы, например, с помощью обычной техники нормализации в зависимости от среднего и стандартного отклонения, вычисленных заранее по серии ранее оцифрованных данных или по другим методам идентичным тем, что описаны в патентной заявке WO20100764681 заявителя.
В дополнение, агенты могут вычислять показатели производительности или качества, указывающие на надежность результатов. Эти показатели качества могут оцениваться статистическими моделями известными как перекрестная проверка (например, folding(свертка), самонастройка(bootstrap), перекрестная проверка с исключением(leave-one-out)) описанными, например, во французской патентной заявке FR2957170 заявителя.
В первом примере, показатель качества может быть показателем соответствия AQV (Adequacy Quality Value(Значение Соответствия Качества)) определяющим величину расстояния между входом агента и входом калибровки, определенным во время обучения агента.
В другом примере, показатель качества соответствует показателю надежности MQV (Model Quality Value (Значение Качества Модели)) измеряющему возможность использования агента по отношению к новым входным данным. Показатель надежности MQV предоставляет информацию о работе агента по отношению к общим данным и указывает затем, каким должно быть в среднее качество агента, когда применяются новые данные.
Другие примеры показателей качества или производительности включают в себя вероятность ложных срабатываний PFA и частоту обнаружения POD. Эти показатели могут быть измерены с максимальной желаемой точностью в виду объема доступных данных. Следует отметить, что возможно создать агенты, в которых PFA низка. В результате получается, что POD не будет большим. Например, проверки на испытательных стендах показали, что POD от 40 до 50% вполне возможен при PFA меньше чем 1%. Очень дорого зря разбирать двигатель, кроме того, в области авиации, безусловно, фокусируются на как можно более низкой доле ложных срабатываний PFA.
И, наконец, результат или выходные данные агента состоят в распределении  вероятности неисправности, которое отражает аномальные характеристики контролируемого компонента. Таким образом, распределение вероятности неисправности можно рассматривать как закон оценки неисправности
вероятности неисправности, которое отражает аномальные характеристики контролируемого компонента. Таким образом, распределение вероятности неисправности можно рассматривать как закон оценки неисправности  где
где  ) - случайная величина, рассчитанная по данным полученным из опыта ω∈Ω измерений полученных из базы данных 15.
) - случайная величина, рассчитанная по данным полученным из опыта ω∈Ω измерений полученных из базы данных 15.
Этот результат (т.е. распределение вероятности неисправности) включает в себя риск неисправности и измерение надежности и точности (например, PFA или POD) агента. Действительно, для заданного порога  определения или срабатывания, зависящего от каждого агента , можно определить риск
определения или срабатывания, зависящего от каждого агента , можно определить риск  неисправности и связанную точность
неисправности и связанную точность  , которые зависят от порога обнаружения, в соответствии со следующими формулами:
, которые зависят от порога обнаружения, в соответствии со следующими формулами:

Точность может быть определена либо с помощью стандартного отклонения риска неисправности, либо с помощью перекрестной проверки, или непосредственно с помощью алгоритмической модели.
Кроме того, каждый из агентов параметризован конкретной конфигурацией  , которая может соответствовать выбору параметров (например, выбору масштабного коэффициента), выбору входных данных (например, временные сигналы или мгновенные сигналы «снимки»), или временная задержка, что приводит к тому, что обычно называют экземпляром алгоритма. С целью упрощения формулировки, считают, что все агенты являются различными.
, которая может соответствовать выбору параметров (например, выбору масштабного коэффициента), выбору входных данных (например, временные сигналы или мгновенные сигналы «снимки»), или временная задержка, что приводит к тому, что обычно называют экземпляром алгоритма. С целью упрощения формулировки, считают, что все агенты являются различными.
Таким образом, каждый агент определяется в соответствии с выбором алгоритма  , его конфигурации и заданным порогом обнаружения. Тогда каждый агент может быть записан как:
, его конфигурации и заданным порогом обнаружения. Тогда каждый агент может быть записан как: 
Средства 3 сбора сконфигурированы для получения начальных распределений  вероятности неисправности (т.е. рисков
вероятности неисправности (т.е. рисков  неисправности и соответствующие точности
неисправности и соответствующие точности  ) полученные от совокупности агентов обнаружения неисправности, а также информация обратной связи на основе опыта 17.
) полученные от совокупности агентов обнаружения неисправности, а также информация обратной связи на основе опыта 17.
Обратная связь на основе опыта получена с помощью экспертизы и связанного с ней риска. Например, обратная связь на основе опыт для определенного компонента может выражаться с помощью риска неисправности экспертизы
 по ошибке, определенной на основании опыта измерений, так же, как достоверность, соответствующая точности, что эксперт определяет для этого риска.
по ошибке, определенной на основании опыта измерений, так же, как достоверность, соответствующая точности, что эксперт определяет для этого риска.
Средства 5 появления используют информацию 17 обратной связи на основе опыта и начальные распределения  вероятности неисправности от совокупности агентов для того, чтобы итеративно обеспечивать появление текущих распределений
вероятности неисправности от совокупности агентов для того, чтобы итеративно обеспечивать появление текущих распределений  вероятности неисправности в соответствии с информацией 17 обратной связи на основе опыта. Эта итеративная структура позволяет текущим распределениям вероятности ошибки сходиться к совокупности оптимальных распределений
вероятности неисправности в соответствии с информацией 17 обратной связи на основе опыта. Эта итеративная структура позволяет текущим распределениям вероятности ошибки сходиться к совокупности оптимальных распределений  вероятности неисправности в соответствии с информацией 17 обратной связи на основе опыта.
вероятности неисправности в соответствии с информацией 17 обратной связи на основе опыта.
Средства 5 появления используют технику экспертных объединений, обеспечивая появление релевантной информации на основании наблюдаемых данных, позволяя значительно улучшить частоту обнаружения POD, сохраняя при этом низкую частоту ложных срабатываний PFA. Действительно, средства 5 появления будут компенсировать низкую частоту обнаружения агента одновременным наблюдением за множеством агентов.
В частности, средства 5 появления включают в себя функции или средства объединения 51, оптимизации 53 и управления 55.
Средства 51 объединения сконфигурированы таким образом, чтобы создавать каждое текущее  или оптимальное
или оптимальное  распределение вероятности неисправности путем объединения предыдущих распределений вероятности неисправности по предопределенным правилам объединения. Операция объединения сводится к комбинации распределений вероятности неисправности (или, более конкретно, рисков неисправности
распределение вероятности неисправности путем объединения предыдущих распределений вероятности неисправности по предопределенным правилам объединения. Операция объединения сводится к комбинации распределений вероятности неисправности (или, более конкретно, рисков неисправности  ), используя совокупность данных от совокупности агентов, позволяя таким образом решить проблему низкой частоты определения.
), используя совокупность данных от совокупности агентов, позволяя таким образом решить проблему низкой частоты определения.
Таким образом, риски неисправности могут быть объединены друг с другом с помощью операций сокращения (например, среднего, регрессии или нейронной сети), чтобы построить новый риск  неисправности, который можно обозначить следующим образом:
неисправности, который можно обозначить следующим образом:
 ,
,
где  это операция объединения, которая может быть бизнес-правилом, байесовой логики, нечеткой логики, механизмом выбора или результатом обучения.
это операция объединения, которая может быть бизнес-правилом, байесовой логики, нечеткой логики, механизмом выбора или результатом обучения.
Объединенные риски  неисправности могут также служить входными данными для других последовательных объединений, создавая направленный граф:
неисправности могут также служить входными данными для других последовательных объединений, создавая направленный граф:
 .
.
Работа с совокупностью рисков неисправности должна обычно принимать в расчет управление взаимоотношениями в направленном графе. Например, удаление риска неисправности может привести к удалению ветви графа. Следует отметить, что далее, не делается различий между риском неисправности, полученным от начального агента или от объединения.
Кроме того, средства 53 оптимизации сконфигурированы для того, чтобы постановки в точное соответствие каждого начального или текущего распределения вероятности неисправности (т.е. первоначальных или текущих рисков неисправности и соответствующих точностей) с информацией обратной связи на основе опыта, которая ему соответствует, чтобы связать с ним значение эффективности. Например, значение эффективности может быть определено на основании расстояния между риском неисправности, полученным от агента, и риском неисправности экспертизы, который ему соответствует. Оптимизация, таким образом, ведет к продолжению улучшения эффективности результата объединения относительно обратной связи на основе опыта.
Преимущественно, средства 53 оптимизации дополнительно выполнены с возможностью регулировать правила объединения на основе информации обратной связи на основе опыта. Действительно, можно использовать регрессивный инструмент проекции на информацию обратной связи на основе опыта для модулирования правил объединения.
Дополнительно, средства 55 управления сконфигурированы таким образом, чтобы изменять совокупность агентов к оптимальной популяции агентов путем создания новых агентов  соответствующих текущим и оптимальным распределениям вероятности неисправности и выбирая агенты наиболее совместимые с информацией обратной связи на основе опыта. Этот выбор может быть основан на значениях эффективности, связанных с текущими или оптимальными распределениями вероятности неисправности. Изменение агентов показано на фиг. 1 обратной стрелкой E, обозначающей переход эффективности к средствам 2 обнаружения, позволяя таким образом оптимизировать алгоритмические агенты
соответствующих текущим и оптимальным распределениям вероятности неисправности и выбирая агенты наиболее совместимые с информацией обратной связи на основе опыта. Этот выбор может быть основан на значениях эффективности, связанных с текущими или оптимальными распределениями вероятности неисправности. Изменение агентов показано на фиг. 1 обратной стрелкой E, обозначающей переход эффективности к средствам 2 обнаружения, позволяя таким образом оптимизировать алгоритмические агенты  , для выбора лучших алгоритмов, параметров, конфигураций или порогов.
, для выбора лучших алгоритмов, параметров, конфигураций или порогов.
Для нахождения оптимальной конфигурации и/или сочетания параметров, выгодно использовать большое число агентов настроенных по-разному, но сравнимых друг с другом. Стохастическая техника типа «генетический алгоритм» позволяет этим агентам менять свои «точки зрения», чтобы, наконец, сходиться к более эффективной популяции. Обучение зависит от информации обратной связи на основе опыта, которая регулярно обновляется экспертами или операторами технического обслуживания. На основе этой информации, агенты могут автоматически настраивать себя. Следует отметить, что генетический алгоритм адаптирован для увеличения популяции агентов созданием новых. Следует напомнить, что агенты - это алгоритмические экземпляры определенных алгоритмов, конфигураций, настроек, порогов обнаружения (или срабатывания), и задержек (например, параметр агента, который может принимать прошлое значение, но не последнее вычисленное значение). Таким образом, новые агенты могут быть созданы операциями алгоритмических мутаций, изменяя параметры экземпляра, или его порог срабатывания. Они могут также быть созданы путем алгоритмических операций скрещивания, интеллектуально смешивая совместимые параметры агентов (например, оптимизацию задержки, масштаба и т.д.). Другие создания могут быть реализованы логическими мутациями путем изменения параметров правил оператора объединения или с помощью логических скрещиваний, ловко сочетая несколько операторов объединения. Новые агенты могут также создаваться путем случайного выбора пар агентов из начальной совокупности агентов для генерации агентов-потомков.
Затем, средства 5 появления рассчитывают значения эффективности, связанные со всеми этими новыми агентами, и реализуют давление отбора, чтобы удерживать из всей популяции только лучшие, сохраняя при этом последовательную структуру графа. Следует отметить, что можно использовать другие методы оптимизации, основанные на интерактивных инструментах, предназначенных для экспертов.
Таким образом, путем управления совокупностью агентов, которые меняются при появлении новой информации обратной связи на основе опыта, средства 55 управления позволяют автоматически определить новые конфигурации, о которых не обязательно подумали и которые наиболее подходят для каждой текущей ситуации. Новая конфигурация может соответствовать новому выбору входных данных агента, новым параметрам обработки агента, или новому выбору наблюдений для калибровки агента.
Возьмем, например, новый двигатель летательного аппарата, который желают контролировать. Текущая технология заключается в использовании совокупности алгоритмов, предопределенных и проверенных экспертами в предметной области. Эти алгоритмы пересекаются, и они применимы к любому типу двигателя, но они не являются специализированными для конкретного двигателя. Кроме того, также они располагают полностью универсальными сенсорами неисправностей (необычно функционирующие), но которые недостаточно эффективны для инициализации, потому что они, как правило, калибруются для всех типов двигателей летательных аппаратов.
Или, новый двигатель, даже если он удовлетворяет критериям документа экспертизы, подготовленного экспертами двигателей, называемого FMEA (Анализ характера, последствий и критичности неполадок), точно определяющего вероятности возникновения каждой неполадки, не будет отображать последовательность абсолютно обычных неполадок. Встреченные проблемы, зависят от конструкции двигателя (его производства, множество деталей и т.д.) от его эксплуатации и от встреченных полетных условий. Таким образом, наиболее вероятными неполадками не обязательно будут те, которые указаны в общем в FMEA, но следуют из условий среды.
Управляя популяцией этих детекторов, которые развиваются сообразно стохастической технике, можно вывести конфигурации адаптированные не только к этому конкретному двигателю, но также построить систему, способную полностью адаптироваться, со временем, к наиболее интересным событиям. Таким образом, динамическое и самостоятельно адаптирующееся применение, которое глобально регулирует совокупность агентов, служащих для диагностики двигателя, имеет гораздо больше шансов указать наиболее вероятные повреждения.
Наконец, средства 7 синтеза сконфигурированы для синтеза оптимальных распределений вероятности неисправности, связанных, по меньшей мере, с одним интересующим подузлом компонентов двигателя, чтобы извлечь конкретные риски неисправности интересующего подузла. В таком случае фокусируют информацию, относящуюся к конкретному подузлу компонентов, для помощи в решении, относящемся к техническому обслуживанию. Например, оптимальные распределения вероятности неисправности могут быть синтезированы в виде палочных диаграмм, отражающих риск по каждому компоненту рассматриваемого двигателя.
Преимущественно, средства 5 появления дополнительно сконфигурированы, чтобы ассоциировать каждое начальное, текущее или оптимальное распределение вероятности неисправности, относящееся к подузлу компонентов двигателя, вектор импликации, отражающий вклад каждого элемента подузла, в соответствующее распределение вероятности неисправности.
Действительно, двигатель 13 или контролируемый узел компонентов двигателя, состоит из подузлов, объединив первоначально физические компоненты, где каждый способен произвести некоторые ошибки. Каждый алгоритмический агент имеет вклад в контроль каждой из этих ошибок. Предполагается, что общее число контролируемых ошибок f конечно и равно K. Тогда можно определить вектор  импликаций для каждого распределения вероятности неисправности следующим образом:
импликаций для каждого распределения вероятности неисправности следующим образом:

Начальный вектор импликации определен как вход данный экспертами для начальных агентов (т.е.  ). После этого каждый вектор импликации вычисляется для каждой операции объединения адаптированным методом, который может быть определен экспертными правилами или который может быть изучен на основании данных. Вектор импликации может быть увиден как априорная вероятность соответствия риска неисправности для оценки ошибки по компоненту.
). После этого каждый вектор импликации вычисляется для каждой операции объединения адаптированным методом, который может быть определен экспертными правилами или который может быть изучен на основании данных. Вектор импликации может быть увиден как априорная вероятность соответствия риска неисправности для оценки ошибки по компоненту.
Следует отметить, что импликация может, конечно, иметь влияние на оптимизацию или повышения общей эффективности популяции агентов. Действительно, обратная связь на основе опыта дается экспертизой  и связанным риском , в виде вектора импликации экспертизы
и связанным риском , в виде вектора импликации экспертизы  Этот вектор уточняет на какие ошибки распространяется экспертиза . Например, мнение об опыте ω измерений, данных экспертом и охватывающих подузел отдельных компонентов для определения хорошо определенной ошибки
Этот вектор уточняет на какие ошибки распространяется экспертиза . Например, мнение об опыте ω измерений, данных экспертом и охватывающих подузел отдельных компонентов для определения хорошо определенной ошибки  , взвешено вектором импликации, чьи координаты равны нулю, за исключением координаты которая равна 1. Затем эксперт смотрит измерения X(ω) (где Х - это вектор измерений, хранимых в базе данных и x = X(ω) соответствующее совокупности значений) и дает ответ
, взвешено вектором импликации, чьи координаты равны нулю, за исключением координаты которая равна 1. Затем эксперт смотрит измерения X(ω) (где Х - это вектор измерений, хранимых в базе данных и x = X(ω) соответствующее совокупности значений) и дает ответ  более или менее обозначенный по этой ошибке. Например,
более или менее обозначенный по этой ошибке. Например,  , если эксперт замечает, что имеется ошибка, и
, если эксперт замечает, что имеется ошибка, и  , в противном случае. В других случаях эксперт может быть менее категоричным, предлагая промежуточное значение так же, как и значение достоверности
, в противном случае. В других случаях эксперт может быть менее категоричным, предлагая промежуточное значение так же, как и значение достоверности  , соответствующее точности, которое он дает своему наблюдению. Таким образом, эксперт будет помогать калибровке системы контроля.
, соответствующее точности, которое он дает своему наблюдению. Таким образом, эксперт будет помогать калибровке системы контроля.
Кроме того, эффективность агента получается по базе доступных экспертиз, согласно расстояния  между риском
между риском  полученным от агента и рисками экспертизы , которые подключают вектора импликации и вектора импликации экспертизы
полученным от агента и рисками экспертизы , которые подключают вектора импликации и вектора импликации экспертизы  и значение достоверности
и значение достоверности  ; например, следующим образом:
; например, следующим образом:
 .
.
Чем меньше эта дистанция, тем более эффективен агент.
Это позволяет средствам синтеза 7 синтезировать оптимальные распределения вероятности неисправности, относящиеся к интересующему подузлу путем взвешивания влияния каждого элемента интересующего подузла согласно соответствующим векторам импликации и достоверности, внесенным в экспертизы. Каждый из агентов обнаружения неисправности может быть связан с одним или несколькими подузлами компонентов двигателя посредством наблюдаемых данных или расчетных показателей. Таким образом, можно выполнить синтез на основе контролируемых компонентов.
Таким образом, благодаря вкладам, представленным вектором импликации, связанным с каждым распределением вероятности неисправности (или риском неисправности), средства синтеза строят синтез с помощью проекции по каждому подузлу компонентов и/или каждой ошибке. Например, следующая формула - простая линейная проекция на подузел, компонент или ошибку:
где ζ - {список контролируемых ошибок},  вектор вкладов каждой ошибки связанной с подузлом
вектор вкладов каждой ошибки связанной с подузлом  (которое обычно получают априорно от FMEA).
(которое обычно получают априорно от FMEA).
Преимущественно, система 1 контроля включает в себя человеко-машинный интерфейс 19 позволяющий экспертам, передавать их мнение во время фаз использования системы контроля.
Кроме того, система контроля может включать средства 21 помощи принятия решения (например, дефектоскоп «troubleshooting», специальные дисплеи и т.д.) которые определяют операции по техническому обслуживанию в соответствии с рисками неисправностей. Средства 21 помощи принятия решения получает на вход риски неисправностей и ссылки на различные подузлы компонентов двигателя и подает на выход операции технического обслуживания, которые необходимо выполнить, с учетом всех возможных операций и их стоимости.
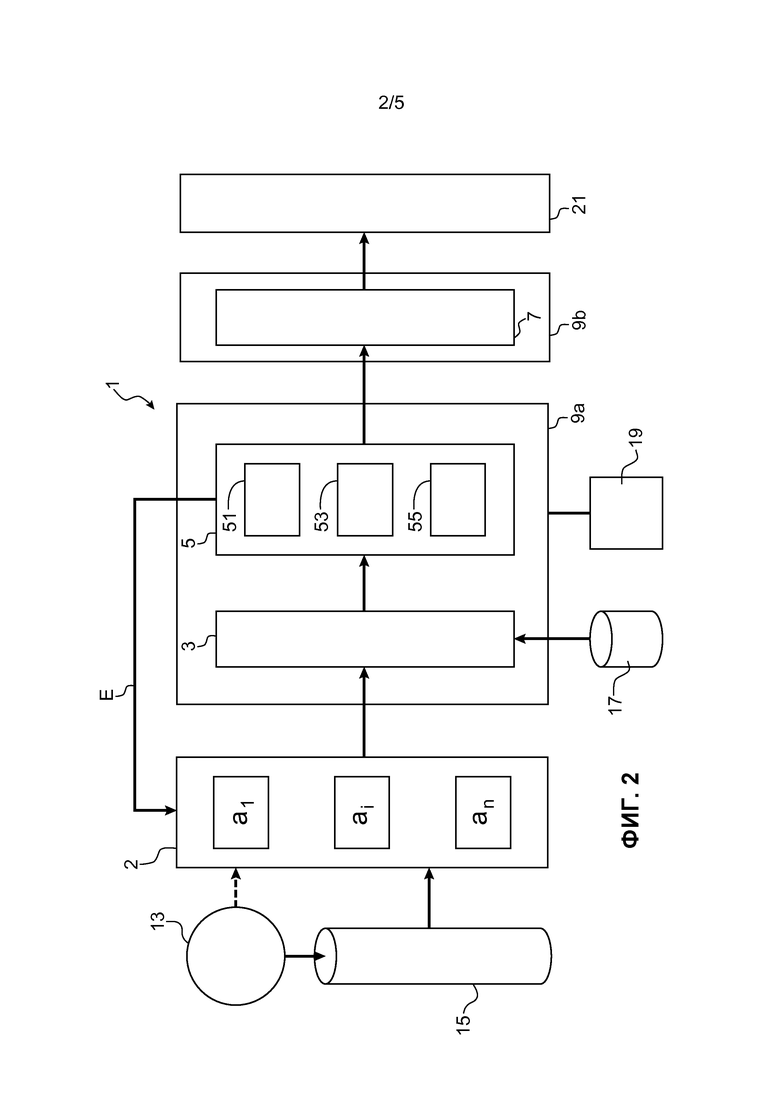
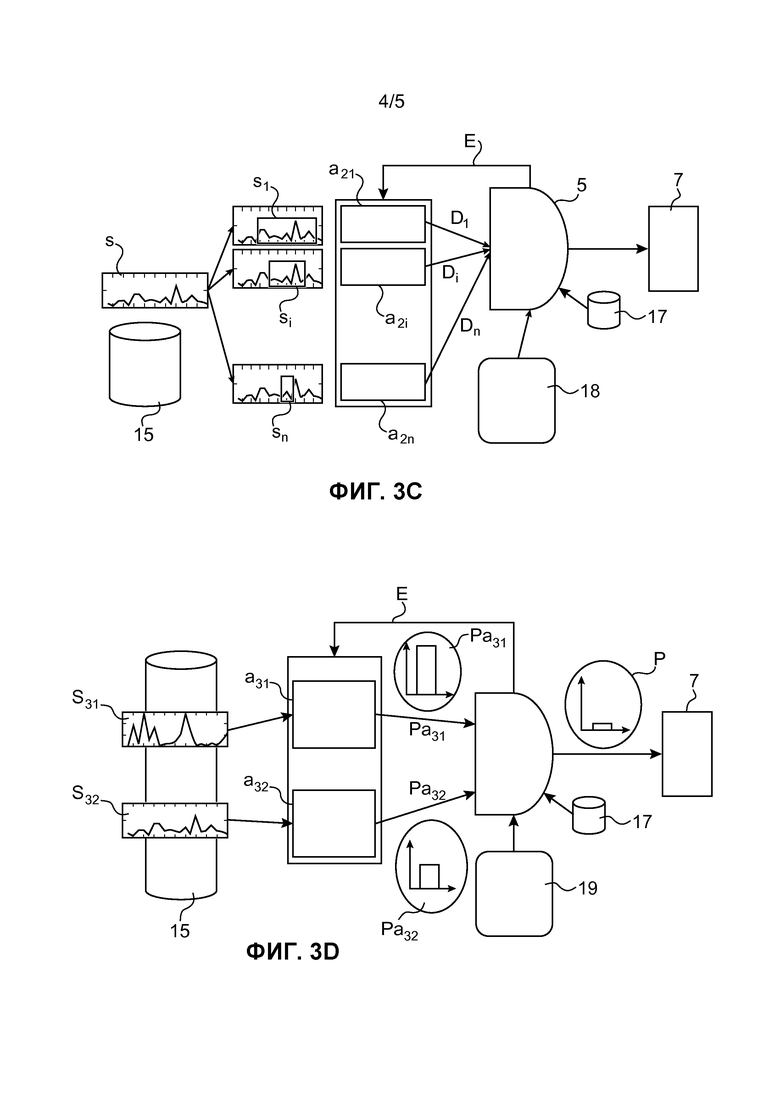
Фиг. 3А-3D схематически показывают примеры объединения в системе контроля узла компонентов оборудования, такого как двигатель летательного аппарата, в соответствии с изобретением.
База данных 15 содержит данные и измерения, касающиеся двигателя летательного аппарата, и его среды, полученные от летательного аппарата 31.
Средства 2 обнаружения включают в себя совокупность начальных агентов обнаружения неисправностей. Следует отметить, что в авиации есть множество обобщенных алгоритмов определения аномалий, которые не контролируются ранее. Эти исходные алгоритмы могут быть значительно увеличены, адаптируя их к любому типу сигналов (временным, снимкам и т.д.) или с разными параметрами (контекст, связанные величины, масштабные коэффициенты и т.д.), но также с различными калибровочными данными. Таким образом, можно реализовать многочисленные агенты для формирования совокупности начальных агентов обнаружения неисправностей.
Различные агенты получают измерения касающиеся двигателя, с целью расчета и подачи на выход начальных распределений вероятности неисправности, определяя риски неисправностей и соответствующие показатели качества.
Следует отметить, что совокупность агентов получает данные, относящиеся к контролируемому двигателю, для определения неисправностей двигателя или подсистем двигателя. Однако, агенты обнаружения неисправностей могут быть откалиброваны на основании данных полученных от парка двигателей. Дополнительно, некоторые агенты могут, например, использовать данные двух двигателей одного и того же летательного аппарата, в целях сравнения их друг с другом. Кроме того некоторые агенты могут сравнивать данные контролируемого двигателя с данными хранящимися в памяти относительно парка двигателей.
Каждый пример на Фиг. 3A-3D реализует несколько агентов (или экземпляров) одного или нескольких алгоритмов.
Средства 5 появления получают через средства 3 сбора начальные распределения вероятности неисправности, полученные от совокупности агентов обнаружения неисправностей. Они также имеют данные или экспертные правила 18, определяющие правила объединения и информацию 17 обратной связи на основе опыта, позволяющую регулировать правила объединения и, особенно, способствующую определению эффективности объединения.
Средства 5 появления объединяют начальные распределения вероятности неисправности для обеспечения итеративного появления текущих распределений соответствующих новым агентам, которые усиливаются объединением. Средства 5 появления выбирают агенты, наиболее соотносящиеся с обратной связью на основе опыта для осуществления схождения к более эффективной популяции агентов, улучшая, таким образом, вероятность обнаружения неисправностей и надежность контроля.
Пример на Фиг. 3A касается контроля начальной возможности запуска двигателя летательного аппарата. В соответствии с этим примером, средства обнаружения 2 включают в себя два агента a1, a2 обнаружения неисправности. Первый агент a1 анализирует измерения М для определения возможности запуска двигателя, второй агент a2 оценивает качество измерения М, используемого первым агентом a1. Например, это качество может зависеть от доли отсутствующих значений или числу странных данных (« не учитываемых»).
Средства 5 появления принимают на вход первое распределение вероятности неисправности  (т.е. первый риск
(т.е. первый риск  неисправности и первая соответствующая ему точность
неисправности и первая соответствующая ему точность  ), оценивающая, может ли двигатель запуститься или нет, и второе распределение вероятности неисправности
), оценивающая, может ли двигатель запуститься или нет, и второе распределение вероятности неисправности  (второй риск неисправности
(второй риск неисправности  и соответствующая вторая точность
и соответствующая вторая точность  ), связанное с качеством измерений.
), связанное с качеством измерений.
Кроме того, средства 5 появления также принимают на вход экспертные правила 18, определяющие принципы объединения, а также информацию обратной связи на основе опыта 17, позволяющую измерить точность или эффективность агентов a1, a2, результаты которых используют.
Средства 5 появления объединяют первое  и второе
и второе  распределения вероятности неисправности в соответствии с экспертными правилами объединения 18, для обеспечения появления текущих распределений вероятности неисправности, оценивая способность запустить двигатель и эффективность объединения с учетом информации обратной связи на основе опыта 17. Текущие распределения вероятности неисправности, таким образом, модулируются на основании информации полученной одновременно из способности к запуску и различных измерений, которые служат для оценки этой способности запуститься.
распределения вероятности неисправности в соответствии с экспертными правилами объединения 18, для обеспечения появления текущих распределений вероятности неисправности, оценивая способность запустить двигатель и эффективность объединения с учетом информации обратной связи на основе опыта 17. Текущие распределения вероятности неисправности, таким образом, модулируются на основании информации полученной одновременно из способности к запуску и различных измерений, которые служат для оценки этой способности запуститься.
Экспертные правила 17 объединения могут, например, быть основаны на точности риска неисправности, связанной с качеством каждого измерения. Например, можно иметь правило сокращения типа «среднего», следующим образом: если среднее рисков неисправности, связанных с качеством измерений, превышает первый заданный порог М1, тогда значение эффективности уменьшает первую величину D1, а если среднее рисков неисправности, связанных с качеством измерения, находится между первым заданным порогом М1 и вторым заданным порогом М2, тогда величина эффективность уменьшает вторую величину D2, и т.д.
Средства 5 появления, затем выбирают текущие распределения вероятности неисправности с лучшими значениями эффективности для обеспечения появления агентов, представляющих полную импликацию и очень связанных с вероятностью запуска двигателя.
Фиг. 3B иллюстрирует пример, где тот же алгоритм применяется на временном сигнале, но в разные моменты времени.
Средства обнаружения содержат совокупность агентов  , фактически соответствующих одному и тому же экземпляру, но с разными конфигурациями. Все агенты получают один и тот же сигнал S, и каждый агент определяет момент t, анализированный в сигнале. Это позволяет диагностировать сигнал в различные последовательные моменты времени
, фактически соответствующих одному и тому же экземпляру, но с разными конфигурациями. Все агенты получают один и тот же сигнал S, и каждый агент определяет момент t, анализированный в сигнале. Это позволяет диагностировать сигнал в различные последовательные моменты времени  , чтобы подтвердить неисправность.
, чтобы подтвердить неисправность.
Совокупность агентов генерирует совокупность результатов  , связанных с совокупностью конфигураций вероятности неисправностей
, связанных с совокупностью конфигураций вероятности неисправностей  .
.
Средства 5 появления принимают совокупность результатов так же, как экспертные правила 18 объединения и информацию обратной связи на основе опыта 17. Они применяют экспертное правило для объединения разных результатов для измерения устойчивости позволяющей подтвердить диагностику. С помощью обратной связи на основе опыта 17, измеренная эффективность может отрегулировать экспертные правила или изменить конфигурацию агентов для оптимизации результата процесса объединения.
Например, экспертные правила объединения сформулированы для подтверждения диагностики обнаружения неисправности, только если сумма обнаружений больше, чем определенный заданный порог сигнализации A, согласно следующей формуле:
 ,
,
где  это результат агента
это результат агента  обнаружения неисправности с конфигурацией момента
обнаружения неисправности с конфигурацией момента  и где D это конечный результат. Этот тип объединения совершает подтверждение обнаружения, снижая частоту ложных срабатываний.
и где D это конечный результат. Этот тип объединения совершает подтверждение обнаружения, снижая частоту ложных срабатываний.
Фиг. 3С иллюстрирует другой пример аналогичный примеру на Фиг. 3B, за исключением того, что в этом примере, входящий сигнал S анализируется по различным масштабам 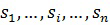 , а не в различные моменты времени.
, а не в различные моменты времени.
Средства 2 обнаружения включают в себя совокупность агентов  , соответствующих одному и тому же экземпляру, но с разными конфигурациями. Все агенты получают один и тот же сигнал S и каждый агент определяет масштаб
, соответствующих одному и тому же экземпляру, но с разными конфигурациями. Все агенты получают один и тот же сигнал S и каждый агент определяет масштаб  или анализируемое окно в сигнале. Это позволяет диагностировать сигнал в различных масштабах , чтобы подтвердить неисправность.
или анализируемое окно в сигнале. Это позволяет диагностировать сигнал в различных масштабах , чтобы подтвердить неисправность.
Совокупность агентов генерирует совокупность результатов , соответствующих совокупности конфигураций вероятности неисправности  . Средства 5 появления принимают на вход совокупность этих результатов так же, как и экспертные правила 18 объединения и информацию обратной связи на основе опыта 17, и применяют, например, то же самое экспертное правило, описанное со ссылкой на пример Фиг. 2B, чтобы объединить различные результаты.
. Средства 5 появления принимают на вход совокупность этих результатов так же, как и экспертные правила 18 объединения и информацию обратной связи на основе опыта 17, и применяют, например, то же самое экспертное правило, описанное со ссылкой на пример Фиг. 2B, чтобы объединить различные результаты.
Фиг. 3D иллюстрирует пример, где применяют два различных экземпляра. Средства обнаружения включают в себя первый и второй агенты  , соответствующие двум разным экземплярам, и каждый агент принимает на вход разный сигнал
, соответствующие двум разным экземплярам, и каждый агент принимает на вход разный сигнал  . Два агента выдают первое и второе распределения вероятности неисправности
. Два агента выдают первое и второе распределения вероятности неисправности  .
.
Два распределения вероятности ошибки сливаются средствами 5 появления соответствии с правилами нечеткой логики, которые могут быть предписаны извне экспертными правилами 18 или автоматически оптимизированы благодаря обратной связи на основе опыта 17. В конце выделяется глобальное распределение вероятности неисправности P в соответствии с информацией обратной связи на основе опыта.
Более того, средства 7 синтеза системы 1 контроля для каждого из приведенных выше примеров синтезируют глобальные и оптимальные распределения вероятности неисправности, относящиеся к компоненту или подсистеме компонентов двигателя, для выдачи конкретных рисков неисправности для этого последнего. В случае, подсистемы компонентов двигателя, оптимальные распределения вероятности неисправности, относящиеся к подсистеме компонентов, синтезируются путем взвешивания влияния каждого компонента подсистемы согласно соответствующим векторам импликации.
Следует отметить, что все риски рассчитаны по двигателю на всем парке двигателей и что, естественно, можно сделать глобальный синтез по летательным аппаратам. В этом случае список ошибок ζ для контроля соответствует всем ошибкам всех компонентов двигателей летательного аппарата. Таким образом, все результаты вычислений рисков всех двигателей могут быть капитализированы глобальным риском R. Ошибки ζ, таким образом, связаны с данными двигателями  , где
, где  представляет ошибку типа
представляет ошибку типа  , связанную с двигателем
, связанную с двигателем  .
.
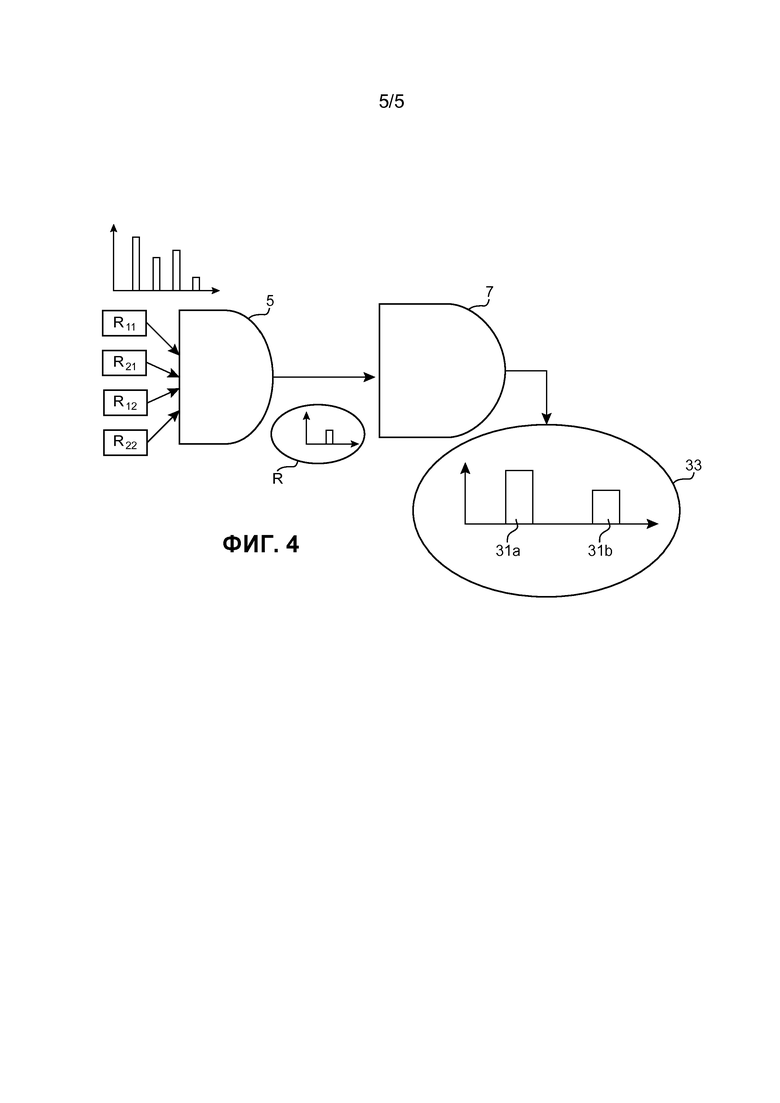
Фиг. 4 схематически показывает конкретный пример синтеза в соответствии с настоящим изобретением.
В этом примере синтез может быть представлен как визуальный инструмент для извлечения данных «visual datamining(визуальный анализ данных)» в том смысле, что синтез заключается в проецировании глобального риска R неисправности, полученного от средств 5 появления, на интересующем подпространстве, позволяя иметь визуализацию результатов. Здесь, оптимальное распределение вероятностей неисправности синтезировано с помощью техник сокращения (например, метода регрессии), используя различные пространства (например, летательный аппарат, двигатель, испытательный стенд, дата, система, алгоритм, наблюдения и т.д.) и концепцию импликации, позволяющую взвесить влияния каждого оптимального распределения вероятности неисправности.
Например, в одномерном подпространстве, можно получить палочную диаграмму, показывающую риск неисправности каждой рассматриваемой переменной. В случае, когда хотят обнаружить поломки на нескольких двигателях разных летательных аппаратах, и когда желают определить летательный аппарат, обладающий большим риском, тогда проецируют оптимальное распределение вероятности неисправности, полученное от объединения, на пространство летательных аппаратов для визуализации риска неисправности по летательному аппарату.
В частности, пример показанный на Фиг. 3, показывает, что средство 5 появления принимает на вход первый и второй риск неисправности R11, R21, оценивая риски неисправности первого и второго двигателя от первого летательного аппарата, а также третьего и четвертого риска неисправности R12, R22, оценивая риски неисправности первого и второго двигателя второго самолета. Глобальный риск R полученный от средств 5 появления проецируется средствами 7 синтеза на пространство 33 летательных аппаратов для визуализации риска неисправности для каждого летательного аппарата 31a и 31b.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИНЯТИЯ РЕШЕНИЙ В МУЛЬТИАГЕНТНОЙ СРЕДЕ | 2021 |
|
RU2791840C2 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ЯЧЕИСТОЙ СЕТИ ВОЗВРАТА ТОКА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2639611C2 |
| Бортовой аналитический комплекс для транспортных средств | 2022 |
|
RU2787310C1 |
| СИСТЕМА ИНТЕГРИРОВАННОГО КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2431175C1 |
| ИНСТРУМЕНТ ВАЛИДАЦИИ СИСТЕМЫ МОНИТОРИНГА АВИАЦИОННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2684225C2 |
| ДИАГНОСТИКА НЕИСПРАВНОСТЕЙ ВО ВРЕМЯ ИСПЫТАНИЯ ТУРБИННОЙ УСТАНОВКИ | 2017 |
|
RU2694105C1 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2013 |
|
RU2631492C2 |
| КОНТРОЛЛЕР БАЛАНСА В ПАРКЕ НАСОСОВ ПРИ ВЫПОЛНЕНИИ ОПЕРАЦИЙ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776144C1 |
| УПРАВЛЕНИЕ ОПЕРАЦИЯМИ РАЗРЫВА ПЛАСТА | 2019 |
|
RU2776140C1 |
Группа изобретений относится к системе и способу контроля узла компонентов оборудования. Система содержит средства обнаружения неисправностей, средства сбора информации обратной связи, средства обеспечения появления текущих распределений вероятности неисправности, средства синтеза оптимальных распределений вероятности неисправности. Для контроля узла компонентов оборудования собирают информацию обратной связи на основе опыта от совокупности агентов обнаружения неисправностей, итеративно обеспечивают появление текущих распределений вероятности неисправности, которые сходятся к совокупности оптимальных распределений, синтезируют оптимальные распределения вероятности неисправности для интересующего узла, определяют риски неисправности, характерные для этого узла. Обеспечивается увеличение частоты обнаружения неисправностей и уменьшение частоты ложных срабатываний при контроле узла компонентов двигателя. 2 н. и 9 з.п. ф-лы, 7 ил.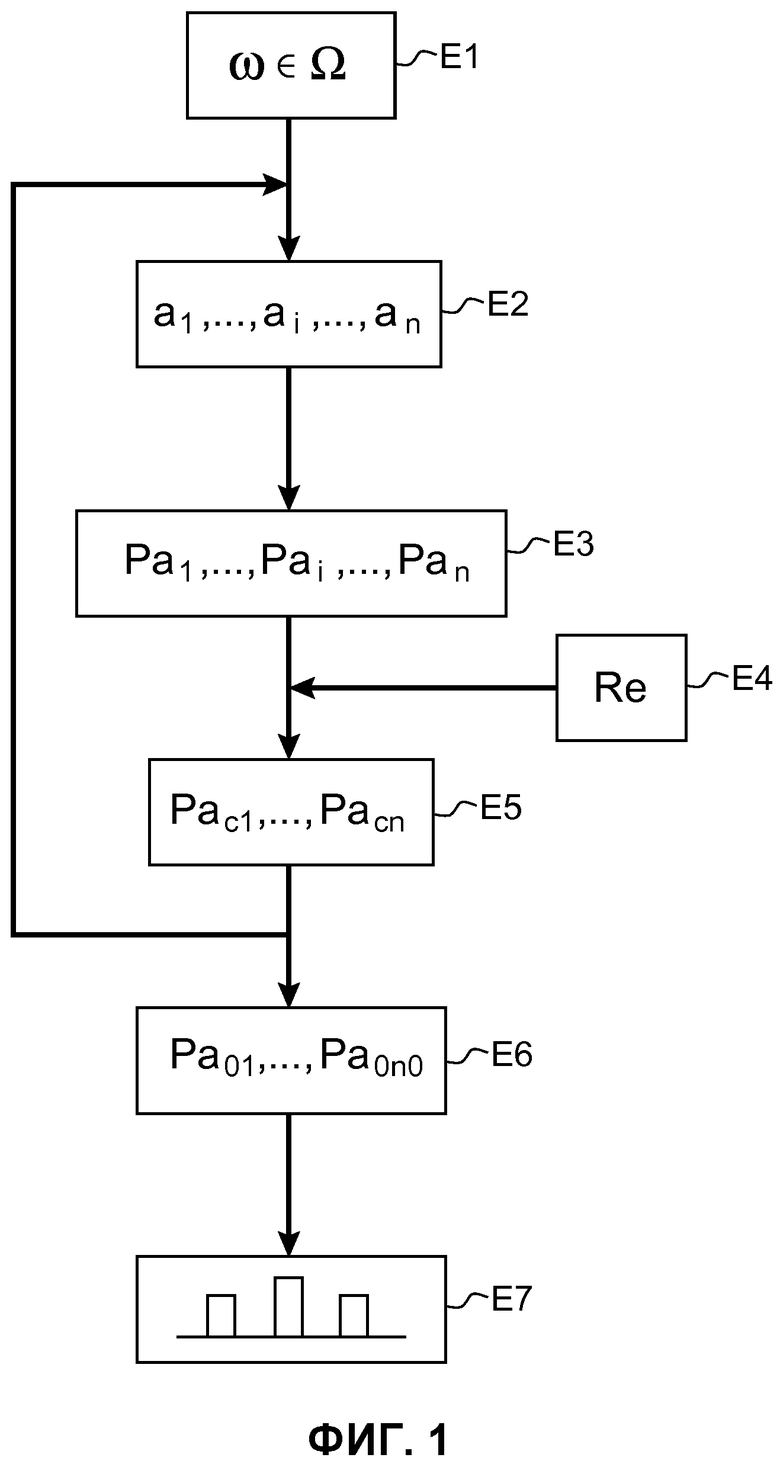
1. Система контроля узла компонентов оборудования, включающая в себя:
- средства (2) обнаружения, включающие в себя совокупность агентов (a1, …, ai, …, an) обнаружения неисправностей, каждый из указанных агентов сконфигурирован с возможностью получать измерения физических параметров, относящихся к подузлу компонентов оборудования, и выдавать начальное распределение вероятности неисправности;
- средства (3) сбора, сконфигурированные для получения информации обратной связи на основе опыта (17), а также начальных распределений вероятности неисправности, полученных от указанной совокупности агентов;
- средства (5) появления, сконфигурированные с возможностью обеспечения итеративного появления текущих распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта, указанные текущие распределения вероятности неисправности сходятся к совокупности оптимальных распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта; и
- средства (7) синтеза, сконфигурированные с возможностью синтеза оптимальных распределений вероятности неисправности относящихся, по меньшей мере, к одному интересующему подузлу компонентов оборудования для извлечения рисков неисправности характерной для указанного интересующего подузла.
2. Система по п. 1, отличающаяся тем, что средства появления включают в себя:
- средства (51) объединения, сконфигурированные с возможностью создания каждого текущего или оптимального распределения вероятности неисправности путем объединения предыдущих распределений вероятности неисправности согласно заданным правилам объединения,
- средства (53) оптимизации, сконфигурированные с возможностью приведения в соответствие каждого начального или текущего распределения вероятности неисправности с информацией обратной связи на основе опыта, которая ему соответствует, для того, чтобы связать с ним значение эффективности, и
- средства (55) управления, сконфигурированные для изменения совокупности агентов к оптимальной популяции агентов, создавая новые агенты, соответствующие текущим и оптимальным распределениям вероятности неисправности, и выбирая агенты, наиболее согласованные с информацией обратной связи на основе опыта по значениям эффективности, связанным с указанными текущими и оптимальными распределениями вероятности неисправности.
3. Система по п. 1, отличающаяся тем, что средства (5) появления дополнительно сконфигурированы с возможностью связывания с каждым начальным, текущим или оптимальным распределением вероятности неисправности, относящимся к подузлу компонентов оборудования, вектора импликации, отражающего вклад каждого элемента указанного подузла на соответствующее распределение вероятности неисправности.
4. Система по п. 3, отличающаяся тем, что средства синтеза (7) сконфигурированы с возможностью синтезировать оптимальные распределения вероятности неисправности, относящиеся к указанному интересующему подузлу, путем взвешивания влияния каждого элемента указанного интересующего подузла согласно соответствующим векторам импликации.
5. Система по п. 2, в котором предопределенные правила объединения выбраны среди следующих правил: экспертные правила, правила сокращения, правила голосования, бизнес-правила, байесовы правила, и правила нечеткой логики.
6. Система по п. 2, отличающаяся тем, что средства (53) оптимизации дополнительно сконфигурированы с возможностью регулировать правила объединения в зависимости от информации обратной связи на основе опыта.
7. Система по любому из пп. 2-6, отличающаяся тем, что совокупность агентов или оптимальная популяция агентов сформирована экземплярами алгоритмов, включающими в себя различные выборы измерений или различные методы обработки, или различные выборы параметров.
8. Система по п. 1, отличающаяся тем, что начальные распределения вероятности неисправности стандартизированы относительно контекста измерений.
9. Система по п. 1, отличающаяся тем, что включает в себя средства (21) помощи решению, которые позволяют определить операции технического обслуживания в зависимости от рисков неисправности.
10. Система по п. 1, отличающаяся тем, что указанное оборудование является двигателем и, в частности, двигателем летательного аппарата.
11. Способ контроля узла компонентов оборудования, содержащий этапы, на которых:
- собирают информацию обратной связи на основе опыта, а также начальные распределения вероятности неисправности, полученные от совокупности агентов обнаружения неисправностей, каждый из указанных агентов сконфигурирован с возможностью получать измерения физических параметров, относящихся к подузлу компонентов оборудования перед выдачей начального распределения вероятности неисправности,
итеративно обеспечивают появление текущих распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта, при этом указанные текущие распределения вероятности неисправности сходятся к совокупности оптимальных распределений вероятности неисправности в соответствии с указанной информацией обратной связи на основе опыта, и - синтезируют оптимальные распределения вероятности неисправности, относящиеся к, по меньшей мере, одному интересующему подузлу компонентов оборудования, для того, чтобы извлечь риски неисправности, характерной для указанного интересующего подузла.
| СПОСОБ ИНТЕГРИРОВАННОЙ ЛОГИСТИЧЕСКОЙ ПОДДЕРЖКИ ЭКСПЛУАТАЦИОННОГО КОНТРОЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2308069C2 |
| RU 2009146122 A, 20.06.2011 | |||
| US 20090292951 A1, 26.11.2009 | |||
| US 20080004840 A1, 03.01.2008 | |||
| US 20080059839 A1, 06.03.2008. | |||

