Заявление о приоритете
Настоящая заявка претендует на приоритет заявки на выдачу патента США No. 14/583 281, поданной 26 декабря 2014 г. и претендующей на приоритет предварительной заявки на выдачу патента США No. 61/968278, поданной 20 марта 2014 г. и озаглавленной «Сигнал обнаружения малых ячеек» ("Small Cell Discovery Signal") и на приоритет предварительной заявки на выдачу патента США No. 61/953 639, поданной 14 марта 2014 г. и озаглавленной «Сигнал обнаружения малых ячеек» ("Small Cell Discovery Signal"), так что все эти заявки включены сюда посредством ссылки во всей своей полноте.
Область техники, к которой относится изобретение
Варианты настоящего изобретения относятся к области радиосвязи и более конкретно к сигналам обнаружения, используемым усовершенствованным узлом В (enhanced Node В (eNB)), чтобы помочь абонентскому терминалу (User Equipment (UE)) определить идентификатор узла eNB. Некоторые варианты относятся к сетям сотовой связи, включая сети, работающие в соответствии с одним или несколькими стандартами Проекта партнерства 3-го поколения (3 GPP LTE).
Уровень техники
Сети радиосвязи развернуты широко для предоставления различных услуг связи, таких как передача голоса, видео, пакетных данных, сервис передачи сообщений, вещание и т.п. Эти сети радиосвязи могут быть сетями многостанционного доступа, способными поддерживать множество абонентов путем совместного использования доступных сетевых ресурсов. К примерам сетей многостанционного доступа относятся сети многостанционного доступа с кодовым уплотнением (Code Division Multiple Access (CDMA)), сети многостанционного доступа с временным уплотнением (Time Division Multiple Access (TDMA)), сети многостанционного доступа с частотным уплотнением (Frequency Division Multiple Access (FDMA)), сети с ортогональным частотным уплотнением (Orthogonal FDMA (OFDMA)) и сети с частотным уплотнением и одной несущей (Single-Carrier FDMA (SC-FDMA)).
Сеть радиосвязи может содержать несколько базовых станций, таких как усовершенствованные узлы В (eNB), которые могут поддерживать связь с несколькими абонентскими терминалами (UE). Терминалы UE могут осуществлять связь с узлом eNB по нисходящей линии и восходящей линии. Термин «нисходящая линия» (или прямая линия) обозначает линию связи от узла eNB к терминалу UE, а термин «восходящая линия» (или обратная линия) обозначает линию связи от терминала UE к узлу eNB.
В качестве части процедуры установления соединения между узлом eNB и терминал UE, этот терминал UE может проверить идентификатор конкретного узла eNB.
Краткое описание чертежей
Фиг. 1 иллюстрирует репрезентативный сигнал в репрезентативной сети радиосвязи согласно некоторым вариантам.
Фиг. 2 иллюстрирует репрезентативные операции терминала UE для установления соединения с узлом eNB согласно некоторым вариантам.
Фиг. 3 иллюстрирует репрезентативную структуру кадра согласно некоторым вариантам.
Фиг. 4 иллюстрирует другую репрезентативную структуру кадра согласно некоторым вариантам.
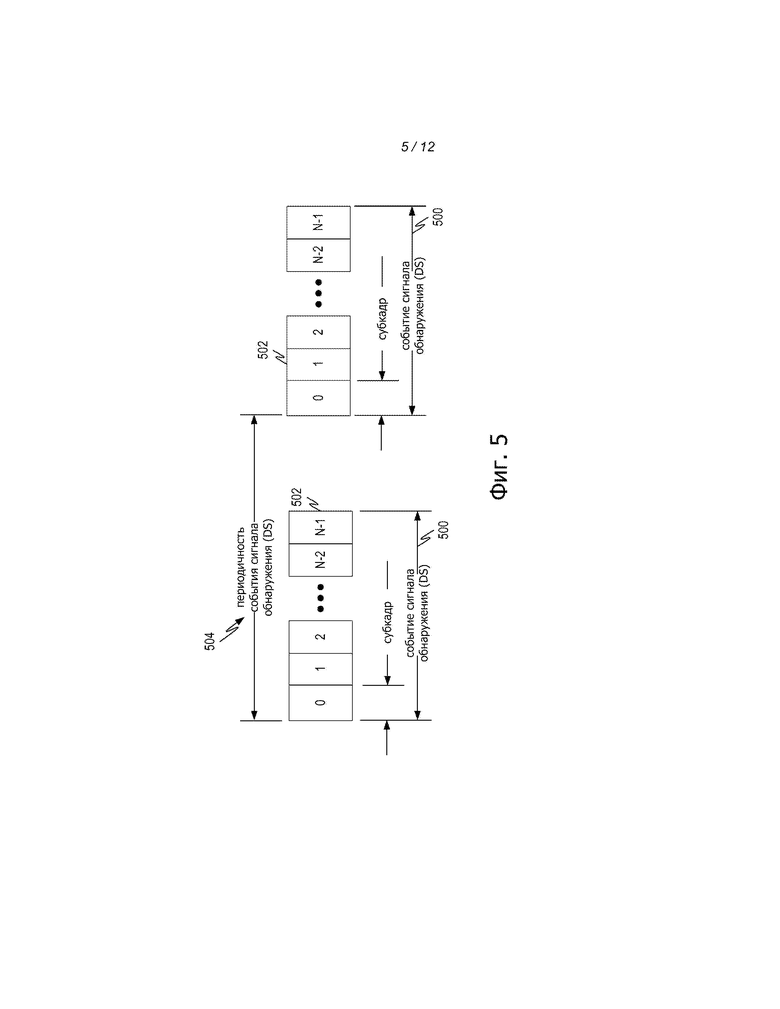
Фиг. 5 иллюстрирует репрезентативное событие сигнала обнаружения (discovery signal (DS)) с соответствующими субкадрами и периодичностью согласно некоторым вариантам.
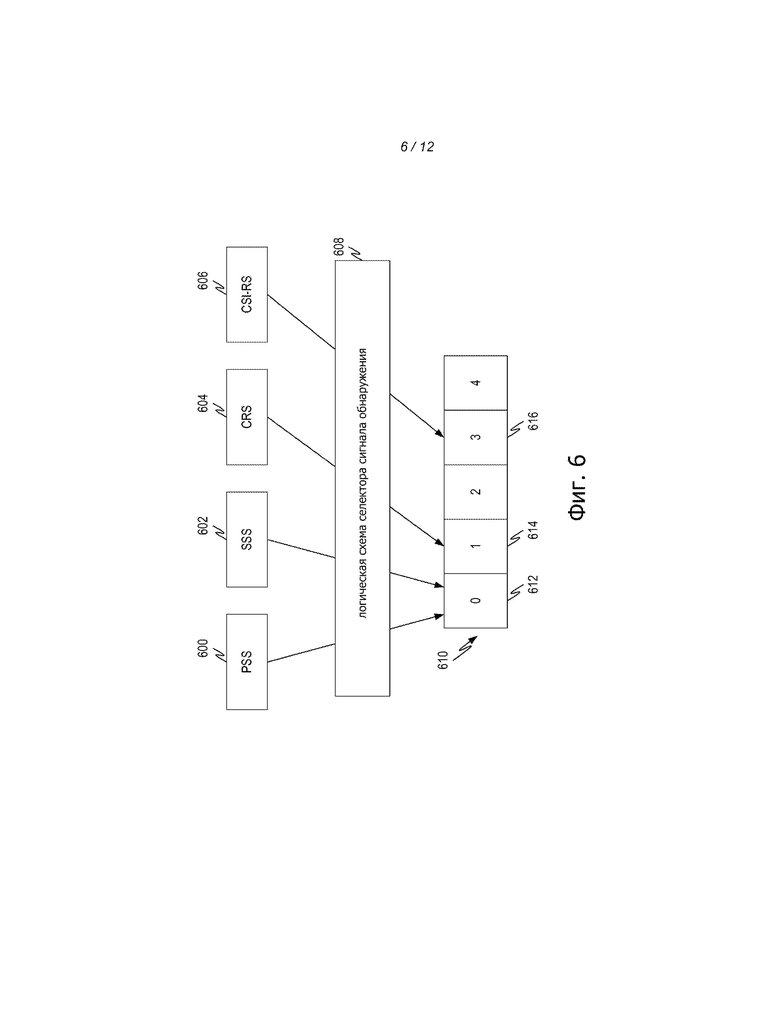
Фиг. 6 иллюстрирует концептуальную структуру для выбора компонентов репрезентативного сигнала DS согласно некоторым вариантам.
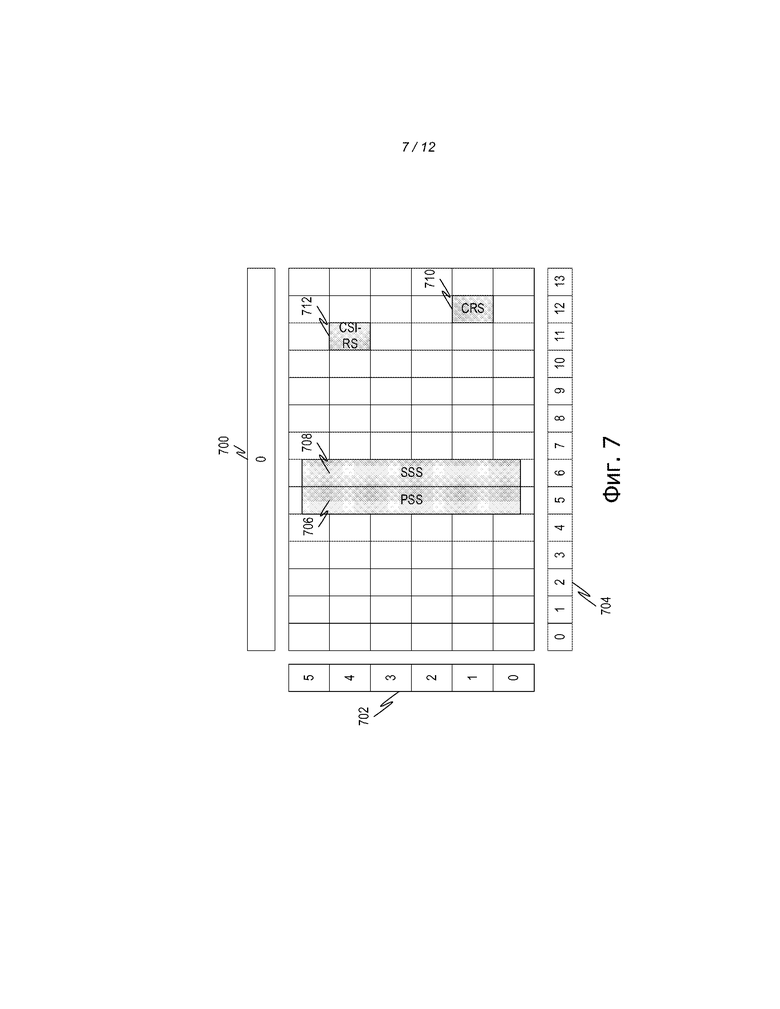
Фиг. 7 иллюстрирует пример репрезентативного сигнала DS согласно некоторым вариантам.
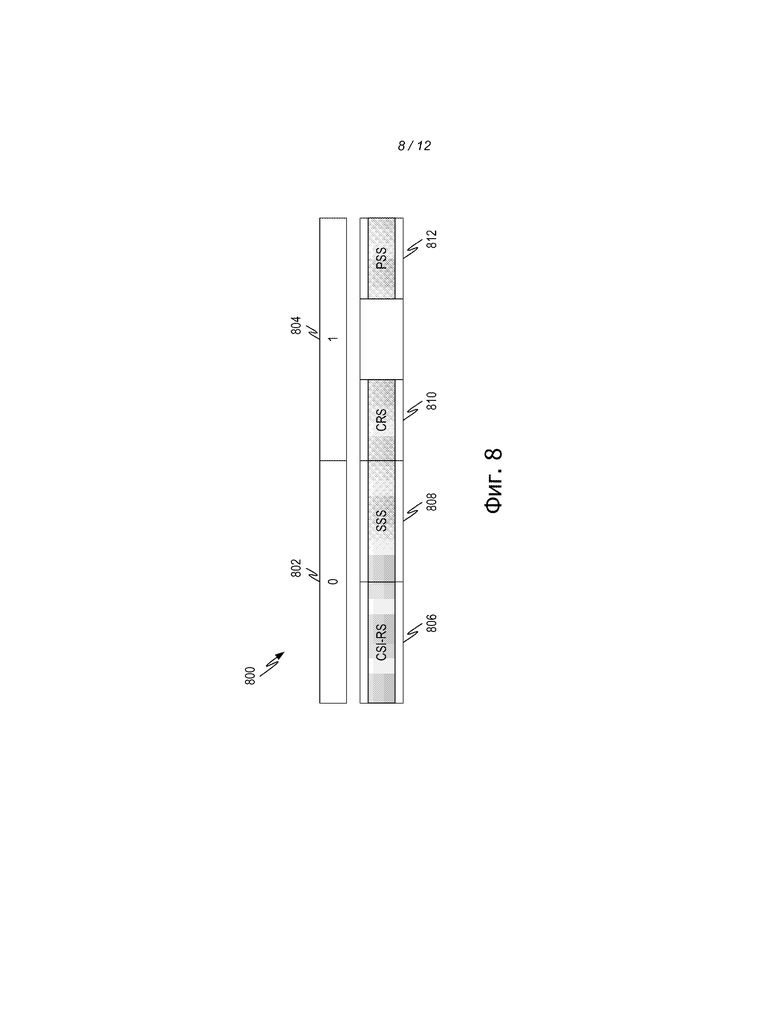
Фиг. 8 иллюстрирует другой пример репрезентативного сигнала DS согласно некоторым вариантам.
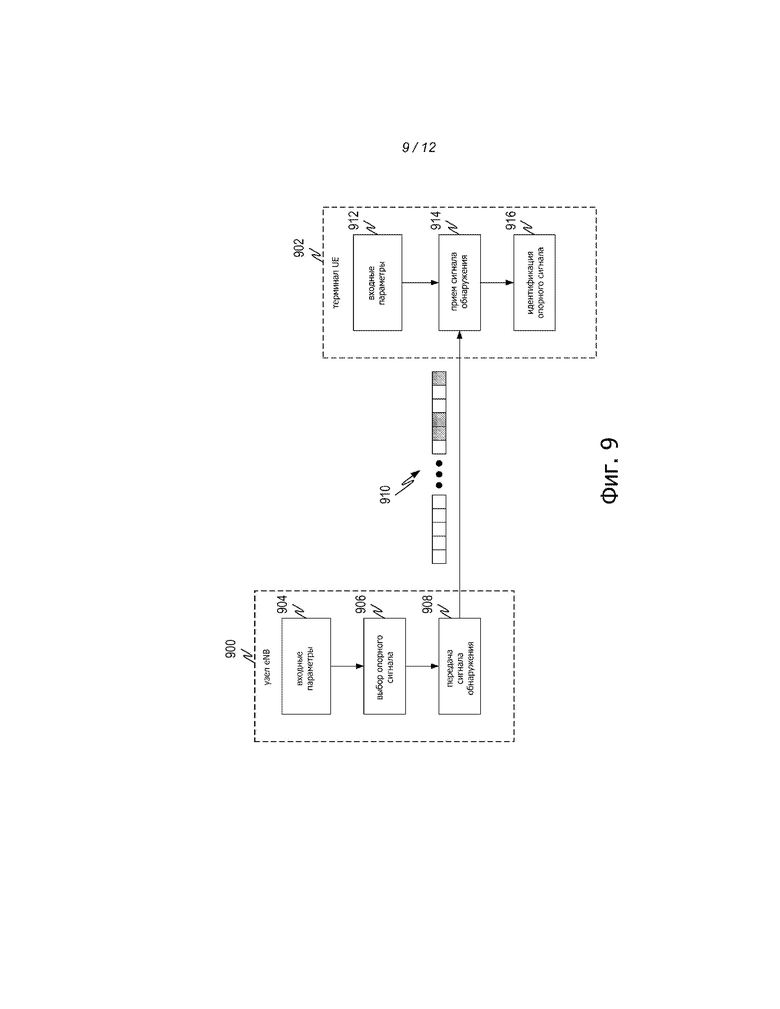
Фиг. 9 иллюстрирует пример узла eNB, передающего пример сигнала DS, и пример терминала UE, принимающего пример сигнала DS, согласно некоторым вариантам.
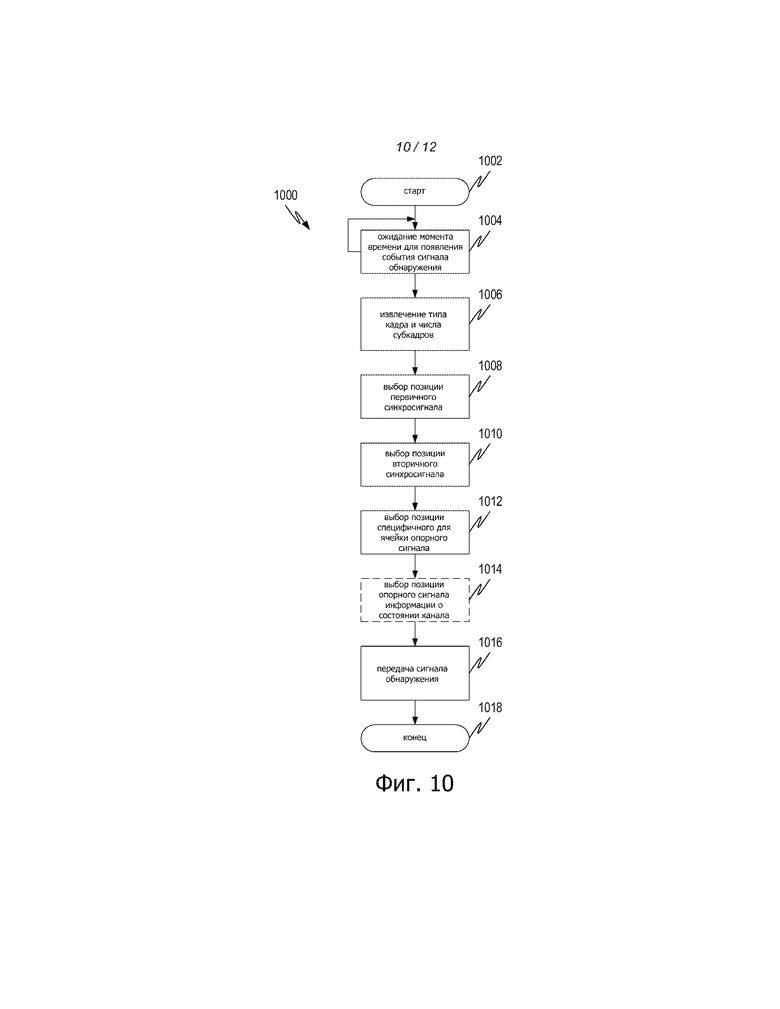
Фиг. 10 иллюстрирует пример логической схемы способа, используемого узлом eNB для создания и передачи репрезентативного сигнала DS, согласно некоторым вариантам.
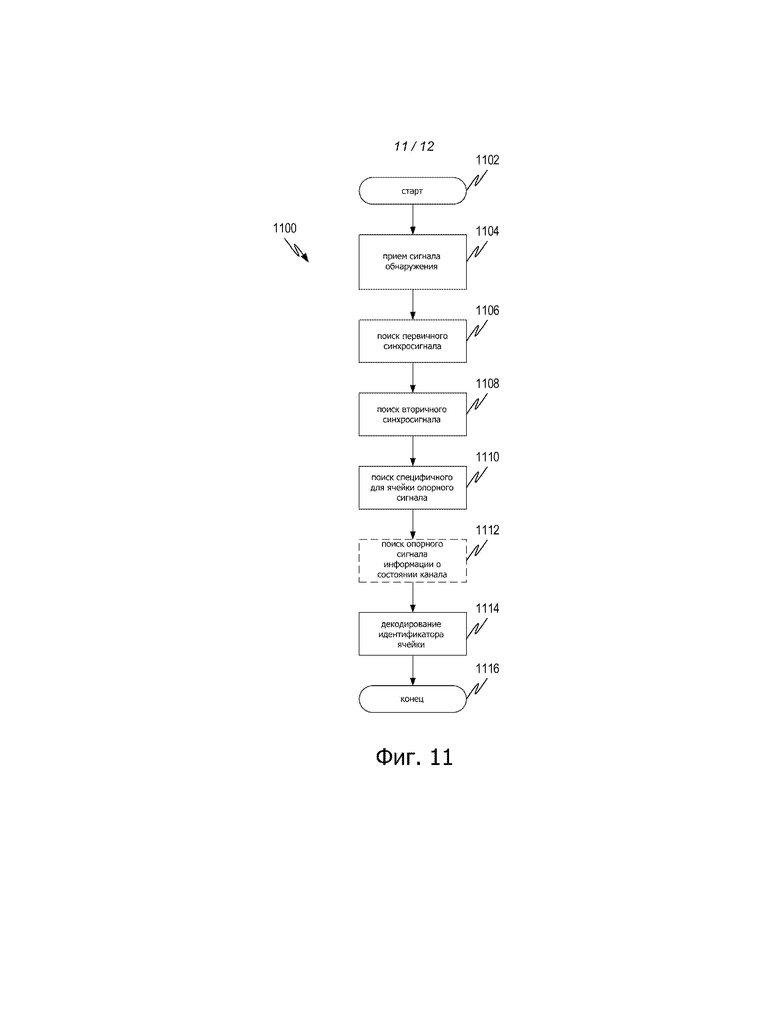
Фиг. 11 иллюстрирует пример логической схемы способа, используемого терминалом UE для приема и декодирования сигнала DS, согласно некоторым вариантам.
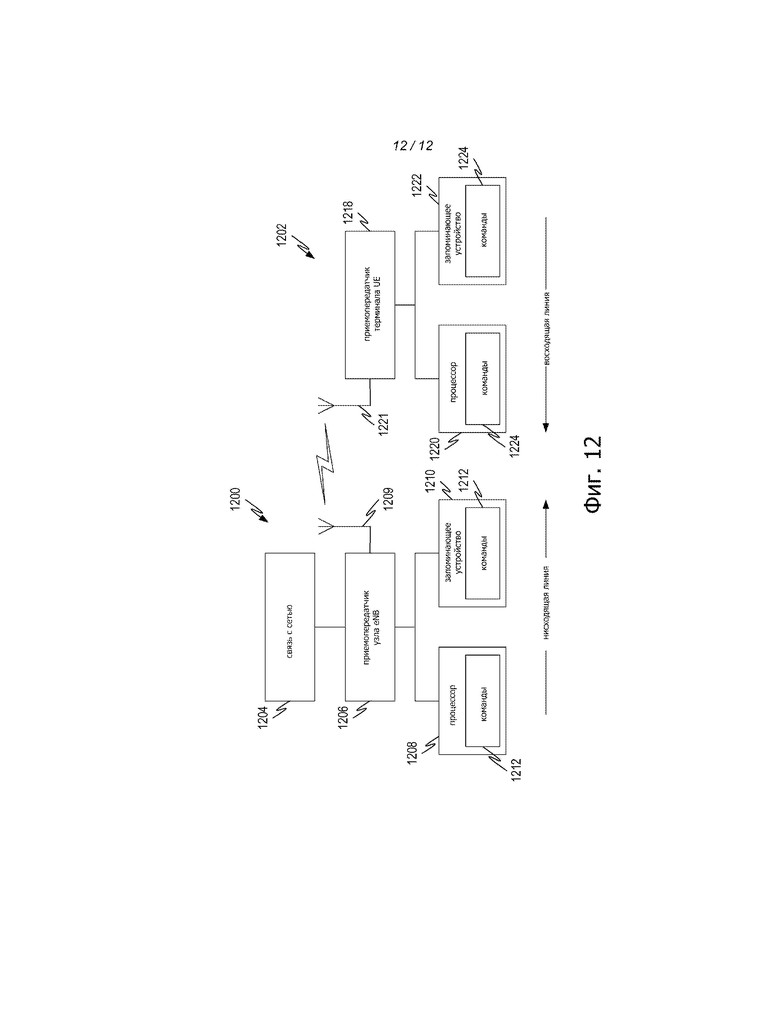
Фиг. 12 иллюстрирует блок-схему примера системы согласно некоторым вариантам.
Подробное описание
Последующее описание и чертежи в достаточной степени иллюстрируют конкретные варианты, чтобы позволить специалистам в рассматриваемой области осуществить эти варианты на практике. Другие варианты могут содержать структурные, логические, электрические, технологические и другие изменения. Части и признаки некоторых вариантов могут быть включены в состав или заменены на соответствующие части и признаки других вариантов. Варианты, заданные в Формуле изобретения, охватывают все возможные эквиваленты этой Формулы изобретения.
Различные модификации этих вариантов станут более очевидны специалистам в рассматриваемой области, а сформулированные здесь общие принципы могут быть применены в других вариантах и приложениях, не отклоняясь от объема настоящего изобретения. Более того, в последующем описании приведены многочисленные подробности с целью разъяснения. Однако даже рядовой специалист в рассматриваемой области должен понимать, что варианты настоящего изобретения могут быть практически реализованы и без этих конкретных подробностей. В других случаях хорошо известные структуры и процедуры не показаны на блок-схеме, чтобы не загромождать и не затемнять описание вариантов настоящего изобретения ненужными подробностями. Таким образом, не следует ограничивать настоящее изобретения только рассмотренными здесь вариантами, напротив, его нужно рассматривать в самом широком объеме, согласованном с принципами и признаками, изложенными здесь.
Часть этих процедур, используемых для установления связи между узлом eNB и терминалом UE в сетях радиосвязи, содержит передачу узлом eNB сигнала обнаружения и использование этого сигнала обнаружения терминалом UE для того, чтобы удостовериться в идентичности конкретного терминала UE. Когда терминал UE находится в зоне действия и/или обслуживается несколькими узлами eNB, так, например, как в случае, когда терминал UE обслуживается и узлом eNB макроячейки, и узлом eNB малой ячейки, обнаружение узла eNB малой ячейки может быть улучшено с использованием сигнала обнаружения. Варианты, описываемые здесь, иллюстрируют примеры сигналов обнаружения (DS) и репрезентативные варианты узла eNB и терминала UE для генерации, передачи и приема таких сигналов DS. Эти сигналы DS являются уникальными и отличаются от любых других сигналов обнаружения, которые могут использоваться в текущий момент.
Сигнал обнаружения (DS) передают в ходе события обнаружения (DS), содержащего один или несколько субкадров. Эти субкадры могут быть субкадрами как нисходящей (DL) линии, так и восходящей (UL) линии в дуплексном режиме с разделением времени (TDD). Например, в некоторых вариантах событие обнаружения (DS) содержит последовательность из N следующих один за другим субкадров. Такая последовательность из N следующих один за другим субкадров может содержать, например, совокупность субкадров нисходящей (DL) линии и восходящей (UL) линии (всего N субкадров) в дуплексной системе с разделением времени (TDD). В случае дуплексного режима с разделением по частоте (FDD) эти N следующих один за другим субкадров могут соответствовать N субкадрам нисходящей (DL) линии. Событие обнаружения (DS) происходит периодически с заданным периодом. Во время события обнаружения (DS) узел eNB выбирает композицию сигнала DS и субкадры во время события обнаружения (DS), которые будут использованы для передачи сигналов, составляющих сигнал обнаружения (DS). Терминал UE отмечает появление события обнаружения (DS), принимает различные сигналы, составляющие это событие обнаружения (DS), и декодирует идентификатор узла eNB из этих сигналов DS. Указанные выбранные субкадры могут быть выбраны таким образом, чтобы минимизировать помехи с другими конкурирующими узлами eNB в некоторых вариантах.
Различные сигналы обнаружения (DS), описываемые здесь, используют сочетание первичного синхросигнала (Primary Synchronization Signal (PSS)), вторичного синхросигнала (Secondary Synchronization Signal (SSS)), специфичного для ячейки опорного сигнала (Cell Specific Reference (CRS)) и/или опорного сигнала информации о состоянии канала (Channel State Information Reference Signal (CSI-RS)) (если сигнал CSI-RS конфигурирован для измерений на основе сигнала обнаружения (DS)). В одном из примеров вариантов сигнал DS содержит синхросигнал PSS, синхросигнал SSS и сигнал CRS. В другом примере, сигнал DS содержит синхросигнал PSS, синхросигнал SSS, сигнал CRS и сигнал CSI-RS. В других вариантах могут быть использованы другие сочетания сигналов.
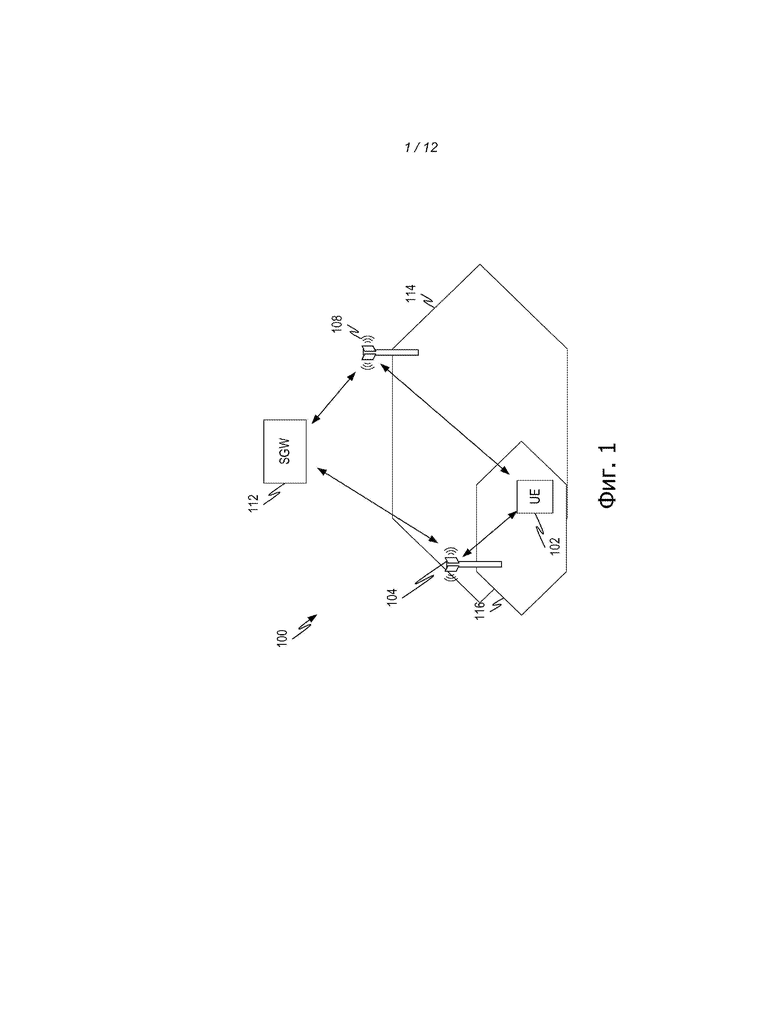
Фиг. 1 иллюстрирует репрезентативный сигнал в репрезентативной сети радиосвязи согласно некоторым вариантам. Чертеж может иллюстрировать либо случай однократного соединения, когда терминал UE 102 обслуживается одним узлом eNB (например, 108 или 104), либо случай агрегирования несущих, либо случай двойного соединения, когда терминал UE обслуживается несколькими несущими/узлами eNB, такими как первичная несущая или узел eNB 108 и вторичная несущая или узел eNB 104. Первичный узел eNB может быть также обозначен как ведущий узел eNB, макро узел eNB или какие-то другие названия, большинство из которых предполагает, что зона 114 обслуживания ячейки, которую обслуживает первичный узел eNB 108, больше зоны 116 обслуживания ячейки, которую обслуживает вторичный узел eNB 104. Вторичный узел eNB 104 может быть также обозначен узел eNB малой ячейки, узел eNB пикоячейки или каким-либо другим подобным названием.
В некоторых, хотя и не всех, вариантах сети, показанной на Фиг. 1, зона 114 обслуживания ячейки, которую обслуживает первичный узел eNB 108, больше зоны 116 обслуживания ячейки, которую обслуживает вторичный узел eNB 104. Оба узла - первичный узел eNB 108 и вторичный узел eNB 104, обслуживаются элементами опорной сети, представленными, например, обслуживающим шлюзом 112.
Для того чтобы помочь терминалу UE 102 установить соединение с узлом eNB 108 и/или узлом eNB 104, узел eNB 104 и/или узел eNB 108 могут передавать терминалу UE сигналы DS обнаружения одного или нескольких типов. Одной из целей сигнала обнаружения (DS) может быть идентификация передающих ячеек/узлов eNB. Сигналы обнаружения (DS) могут иметь общий формат для узлов eNB (например, узла eNB 108 и узла eNB 104) или могут иметь разные форматы в зависимости от вариантов.
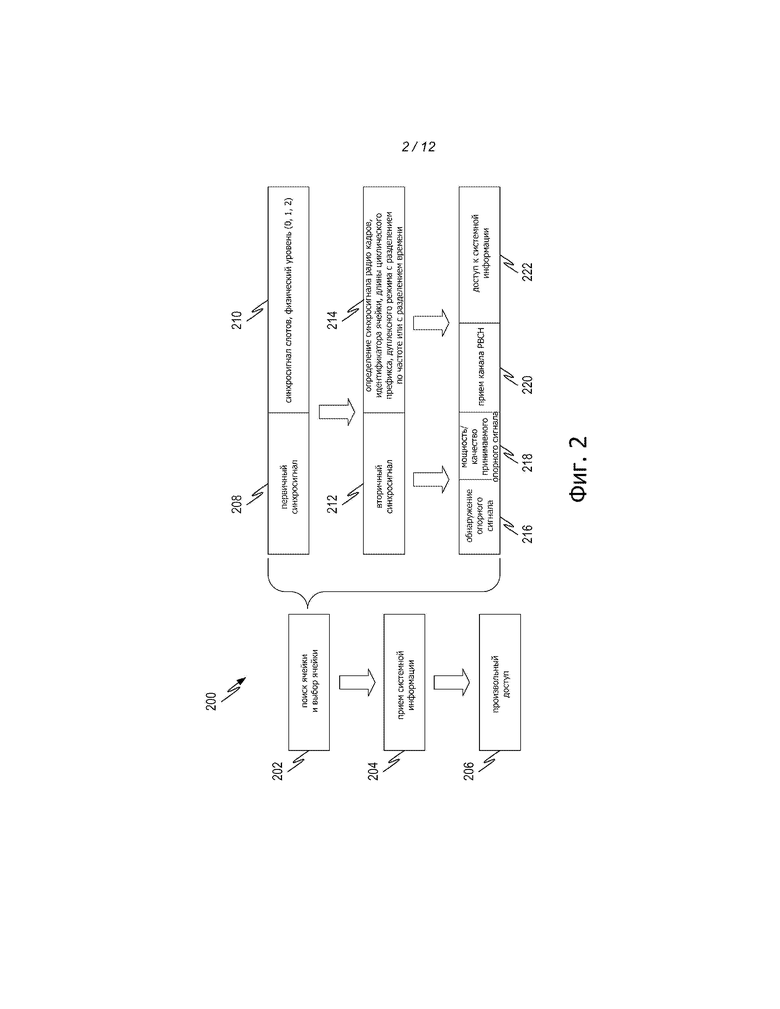
Фиг. 2 иллюстрирует репрезентативные операции терминала UE для установления связи с узлом eNB. Совокупность операций, выполняемых терминалом UE, обозначенная в целом поз. 200, содержит операцию 202 - поиск и выбор ячейки, операцию 204 - прием системной информации и операцию 206 - произвольный доступ.
Успешное завершение операции 202 поиска и выбора ячейки, а также получение первоначальной информации должны быть осуществлены прежде, чем терминал UE сможет установить связь с сетью. Современные сети LTE используют иерархическую процедуру поиска ячейки, в ходе которой ячейку сети LTE (т.е. узел eNB, обслуживающий область ячейки) идентифицируют посредством идентификатора ячейки, представляющего собой один из 504 уникальных идентификаторов, которые могут принимать значения от 0 до 503. Эти идентификаторы разбивают на 168 групп (с номерами от 0 до 167) уникальных идентификаторов на уровне ячеек, по три идентификатора (0-2) физического уровня в каждой группе. Однако при использовании сигналов обнаружения (DS), описываемых ниже, идентификаторы ячеек могут быть назначены по-другому, поскольку к этим, описываемым ниже сигналам обнаружения (DS) применяются другие сигналы и другие правила.
Из совокупности существующих сигналов обнаружения (содержащих синхросигналы PSS и SSS), синхросигнал PSS позволяет терминалу UE определить синхросигнал (моменты времени) слотов, а код, используемый сигналом PSS, позволяет определить идентификатор физического уровня (0, 1, 2), как это обозначено на Фиг. 2 операциями 208 и 210. Затем синхросигнал SSS позволяет определить синхросигнал (моменты времени) радиокадров, дает возможность терминалу UE найти идентификатор ячейки (Cell) ID (0-167) физического уровня, позволяет определить длину циклического префикса и дает возможность терминалу UE детектировать сигнал в дуплексном режиме с разделением по частоте (FDD) или с разделением по времени (TDD) (операции 212 и 214). Таким образом, для этих сигналов обнаружения идентификатор (ID) ячейки получают в соответствии со следующим уравнением:

Здесь: идентификатор (ID) группы ячеек представляет собой идентификатор (ID) (0-167) физического уровня групп ячеек и идентификатор ячейки (Cell ID) представляет собой идентификатор физического уровня (0-2).
После установления первичной и вторичной синхронизации последний этап состоит в обнаружении каких-либо опорных сигналов (операция 216), осуществлении оценки характеристики нисходящего канала (операция 218), такой как мощность принимаемого опорного сигнала (Reference Signal Received Power (RSRP)) и качество принимаемого опорного сигнала (Reference Signal Received Quality (RSRQ)), приеме физического вещательного канала (Physical Broadcast Channel (PBCH)) (операция 220) и доступе к системной информации (операция 222).
Как показано в операциях 204 и 206, терминал UE может затем принять системную информацию и начать передачу информации с использованием ячейки.
Фиг. 3 иллюстрирует репрезентативную структуру кадра согласно некоторым вариантам. Эта структура кадра является репрезентативной для демонстрации, например, структуры кадра LTE Тип 1. Эта структура кадра Тип 1 используется для систем LTE, работающих в дуплексном режиме с разделением по частоте (LTE FDD). Продолжительность каждого кадра 300 составляет 10 мс, причем каждый кадр содержит 10 субкадров 302 по 1 мс каждый. Каждый субкадр имеет два слота (интервала) 304, продолжительность каждого из которых равна 0.5 мс. Каждый слот содержит семь ODFM-символов 306, каждый из которых снабжен циклическим префиксом 308.
Общее число поднесущих 310 в каждом слоте зависит от ширины полосы и представлено на Фиг. 3 числом N. Ресурсный блок 312 содержит 12 поднесущих.
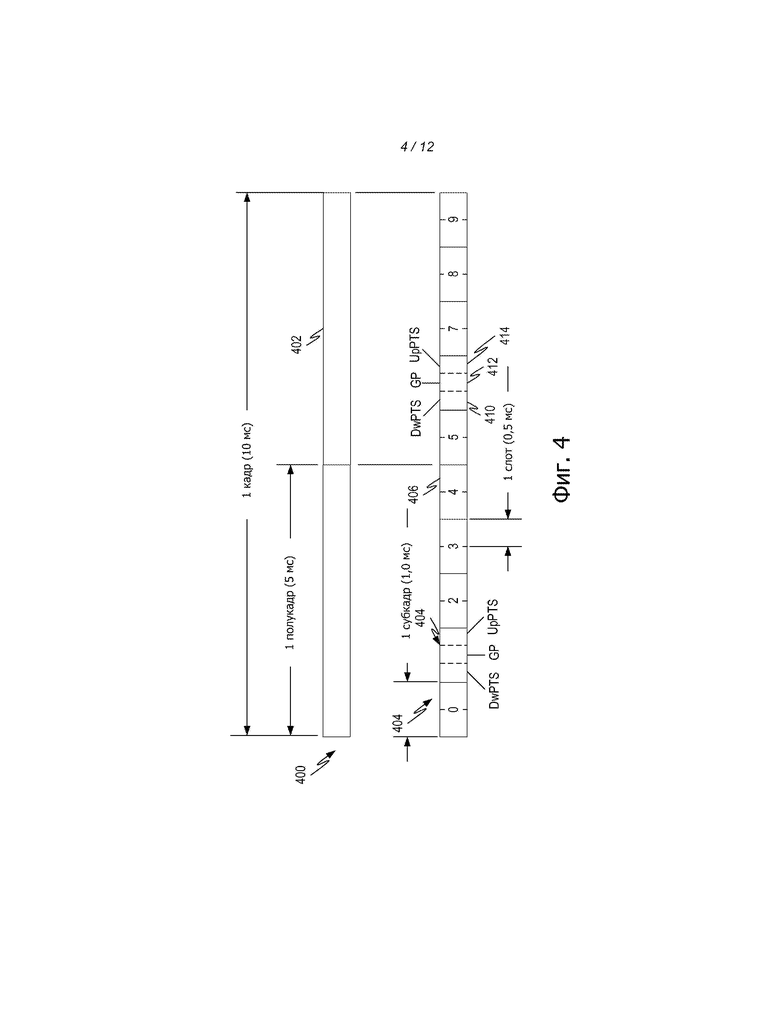
Фиг. 4 иллюстрирует другую репрезентативную структуру кадра согласно некоторым вариантам. Эта структура кадра является репрезентативной для демонстрации, например, структуры кадра LTE Тип 2. Эта структура кадра Тип 2 используется для систем LTE, работающих в дуплексном режиме с разделением времени (LTE TDD). Продолжительность каждого кадра 400 составляет 10 мс, причем каждый кадр содержит 2 полукадра 402 по 5 мс каждый. Каждый полукадр 402 имеет пять субкадров 404, продолжительность каждого из которых равна 1 мс. Каждый субкадр содержит по два слота 406 по 0.5 мс каждый.
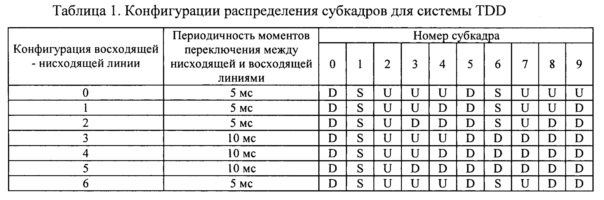
Тогда как система LTE, работающая в дуплексном режиме с разделением по частоте (frequency division duplexing (FDD)), содержит 10 смежных субкадров нисходящей линии и 10 смежных субкадров восходящей линии в каждом кадре, система LTE, работающая в дуплексном режиме с разделением времени (time-division duplexing (TDD)), имеет несколько вариантов распределения субкадров между восходящей и нисходящей линиями, назначения субкадров нисходящей линии и субкадров восходящей линии для которых приведены в таблице 1, где литеры D, U и S представляют соответствующие субкадры и обозначают, соответственно, субкадр нисходящей линии, субкадр восходящей линии и специальный субкадр, содержащий передачи нисходящей линии в своей первой части и передачи восходящей линии в своей последней части.
Два специальных субкадра 408 содержат временной интервал (слот) 410 для пилот-сигнала нисходящей линии (Downlink Pilot Time Slot (DwPTS)), защитный период 412 (Guard Period (GP)) и временной интервал (слот) 414 для пилот-сигнала восходящей линии (Uplink Pilot Time Slot 414 (UpTS)). Эти три поля являются индивидуально конфигурируемыми с точки зрения продолжительности, хотя суммарная продолжительность всех трех полей равна 1 мс. Для структуры кадра типа 2 субкадры назначают в качестве субкадров восходящей линии, нисходящей линии или специальных субкадров согласно таблицы 1 ниже.
Сигналы DS согласно настоящему изобретению передают периодически, чтобы дать возможность терминалу UE идентифицировать ячейку. Фиг. 5 иллюстрирует репрезентативное событие сигнала обнаружения (DS) с соответствующими субкадрами и периодичностью согласно некоторым вариантам. Событие 500 сигнала обнаружения (DS) содержит несколько последовательных субкадров 502. На Фиг. 5 число этих субкадров обозначено N, а субкадры 502 могут иметь номера от 0 до N-1, хотя может быть использована и другая схема нумерации. Субкадры 502 являются такими же субкадрами, как те, что обсуждались применительно к Фиг. 3 и Фиг. 4 выше. Общее число субкадров 502 в составе события 500 сигнала обнаружения (DS) зависит в некоторых вариантах от типа структуры субкадров (т.е. тип 1 или тип 2). В некоторых вариантах, для типа 1 событие 500 сигнала обнаружения (DS) содержит от одного до пяти субкадров 502. В некоторых вариантах, для типа 2 событие 500 сигнала обнаружения (DS) содержит от двух до пяти субкадров 502. В этих вариантах субкадры 502 являются последовательными. В некоторых вариантах значение, вкладываемое в это слово «последовательные», «привязано» к типу структуры субкадров (тип 1 или тип 2). В этих вариантах N последовательных субкадров могут содержать суммарную совокупность субкадров нисходящей (DL) и восходящей (UL) линий (суммарная численность субкадров равна N) для структуры субкадров типа 2 (структура с разделением времени (TDD)). Для структуры субкадров типа 1 (структура с разделением по частоте (FDD)), N последовательных субкадров могут соответствовать N субкадрам нисходящей (DL) линии. В других вариантах используется другое число субкадров 502. В вариантах, где число субкадров 502 может варьироваться (от одного до пяти, от двух до пяти, например), конфигурация числа субкадров 502 может поступить с более высокого уровня, чем физический уровень приемника, такого как уровень управления радиоресурсами (Radio Resource Control (RRC)) или какой-либо другой уровень.
Событие 500 сигнала обнаружения (DS) имеет период 504. Этот период 504 в некоторых вариантах составляет 40 мс, 80 мс или 160 мс. В некоторых вариантах этот период 504 можно выбирать, в других вариантах период 504 зависит от различных параметров или может быть конфигурирован более высоким уровнем, таким как, например, уровень управления RRC.
В некоторых вариантах во время события сигнала обнаружения (DS) терминал UE может предполагать, что в это время нет никаких других сигналов за исключением сигналов DS.
Фиг. 6 иллюстрирует концептуальную структуру для выбора компонентов репрезентативного сигнала DS согласно некоторым вариантам. В отличие от известных сигналов обнаружения, сигналы DS согласно настоящему изобретению содержат не только синхросигнал PSS 600 и синхросигнал SSS 602, а также по меньшей мере один из сигналов - специфичный для ячейки опорный сигнал 604 (CRS) и/или опорный сигнал 606 информации о состоянии канала (CSI-RS). Таким образом, сигнал DS может содержать какое-либо из следующих сочетаний сигналов - сигналы PSS 600 и SSS 602 и CRS 604, сигналы PSS 600 и SSS 602 и CSI-RS 606, сигналы PSS 600 и SSS 602 и CRS 604 и CSI-RS 606, равно как и другие возможные сочетания, такие как сигналы PSS 600 и CSI-RS 606 или сигналы PSS 600 и SSS 602, но в сочетаниях, отличных от тех, в которых эти сигналы используются сегодня. Таким образом, различные варианты используют сигнал DS, содержащий один или несколько опорных сигналов PSS 600, SSS 602, CRS 604 и/или CSI-RS 606. Другие сигналы также могут быть использованы.
Варианты настоящего изобретения содержат логическую схему 608 селектора сигнала DS, которая выбирает, какие сигналы (600, 602, 604, 606) следует использовать для сигнала DS, и какие субкадры из состава события сигнала обнаружения (DS) следует использовать для передачи различных сигналов, составляющих сигнал DS. Кроме того, если сигнал (600, 602, 604, 606) может быть передан в разных временных и/или частотных слотах в пределах субкадра или такой сигнал может быть конфигурирован с использованием различных характеристик сигнала, таких как код для синхросигнала PSS и/или синхросигнала SSS, логическая схема селектора сигнала DS также может сделать этот выбор в некоторых вариантах. Как показано на Фиг. 6, событие сигнала обнаружения (DS) в целом обозначено поз. 610, и, в иллюстрируемом варианте, оно содержит пять субкадров, где некоторые субкадры обозначены 612, 614 и 616. Логическая схема 608 селектора сигнала DS выбирает конкретные сигналы, которые должны быть переданы как часть сигнала DS в составе события сигнала обнаружения (DS), и отображает индивидуальные сигналы в соответствующие субкадры. Например, синхросигналы PSS 600 и SSS 602 отображают в субкадр 612, сигнал CRS 604 отображают в субкадр 614 и сигнал CSI-RS отображают в субкадр 616. Однако это всего лишь репрезентативный пример.
Различные сигналы можно передавать по «балансной» или по «небалансной» схеме. Другими словами, некоторые варианты используют балансную схему, другие варианты используют небалансную схемы, а третьи варианты используют обе схемы.
В случае небалансных передач различные компоненты сигнала DS передают в разных субкадрах. Таким образом, репрезентативный пример, показанный на Фиг. 6, представляет собой небалансную передачу, поскольку синхросигналы PSS 600 и SSS 602 передают в субкадре 612, а сигнал CRS 604 передают в субкадре 614 и сигнал CSI-RS 606 передают в субкадре 616.
Другие примеры небалансных схем могут быть осуществлены между сигналом А и сигналом В, когда эти сигналы А и В передают в различных субкадрах. В одном из примеров сигнал А содержит синхросигнал PSS и/или синхросигнал SSS, тогда как сигнал В содержит сигналы CRS и/или CSI-RS. В другом примере сигнал А содержит сигналы PSS, SSS и/или CRS, тогда как сигнал В не содержит ничего.
В балансной схеме все сигналы передают в одном и том же субкадре, а в некоторых вариантах повторяют в одном или нескольких последующих субкадрах.
Логическая схема 608 селектора сигнала DS может быть конфигурирована несколькими способами, которые могут варьироваться от одного варианта к другому. В одном из примеров вариантов узел eNB сам конфигурирует логическую схему 608 селектора сигнала DS, например, с использованием обработки данных RRC. В других вариантах узел eNB может принимать от других источников, таких как опорная сеть, информацию, используемую либо в качестве прямой директивы конфигурирования логической схемы 608 селектора сигнала DS, либо в качестве помощи при идентификации частей конфигурации логической схемы селектора сигнала DS.
В качестве примера, синхросигналы PSS и/или SSS передают по меньшей мере в одном субкадре, чтобы избежать помех от других ячеек. Логическая схема селектора может использовать различные правила, такие как:
1. Местонахождение передаваемых сигналов PSS и/или SSS во временной и/или в частотной области может быть предварительно задано в соответствии с идентификатором ID ячейки или идентификатором ID виртуальной ячейки.
2. Местонахождение передаваемых сигналов PSS и/или SSS во временной и/или в частотной области может быть конфигурировано посредством сигнализационного сообщения с более высокого уровня, такого как уровень RRC.
3. Местонахождение передаваемых сигналов CRS и/или CSI-RS во временной и/или в частотной области может быть предварительно задано в соответствии с идентификатором ID ячейки или идентификатором ID виртуальной ячейки.
4. Местонахождение передаваемых сигналов CRS и/или CSI-RS во временной и/или в частотной области может быть конфигурировано посредством сигнализационного сообщения с более высокого уровня, такого как уровень RRC.
В логической схеме селектора сигнала DS могут быть добавлены и/или заменены и другие правила. В одном из вариантов логическая схема селектора сигнала DS содержит следующие правила:
1. Сигнал CRS передают через антенный порт 0 во всех субкадрах нисходящей линии и в слоте DwPTS во всех специальных субкадрах в составе события сигнала обнаружения (DS).
2. Сигнал PSS передают в первом субкадре в составе события сигнала обнаружения (DS) для структуры кадров типа 1 или во втором субкадре в составе события сигнала обнаружения (DS) для структуры кадров типа 2.
3. Сигнал SSS передают в первом субкадре в составе события сигнала обнаружения (DS).
4. Сигнал CSI-RS с ненулевой мощностью передают в нулевом или большем числе субкадров в составе события сигнала обнаружения (DS).
В других вариантах, используются другие правила логической схемы селектора сигнала DS. Более того, правила, применяемые в каком-либо варианте, могут дополнительно задавать характеристики сигналов, используемых в качестве сигналов DS, включая последовательность или код, применяемые при передаче, местонахождение в пределах субкадра, такое как указание слота, используемого для передачи сигнала, поднесущую, служащую для передачи сигнала, (для тех сигналов, которые используют одну или несколько поднесущих) или другие характеристики сигнала. Эти характеристики или правила выбора могут быть предварительно заданы в соответствии с идентификатором ID ячейки (физической или виртуальной), могут быть конфигурированы посредством сигнализационного сообщения с более высокого уровня, такого как уровень RRC, и/или с применением обоих способов.
Варьирование этих характеристик может нести для терминала UE информацию, позволяющую этому терминалу UE декодировать идентификатор ID ячейки, обслуживаемой передающим узлом eNB..Таким образом, логическая схема селектора сигнала DS использует также эти правила для кодирования подходящего идентификатора в сигнале DS, путем, например, варьирования передаваемых сигналов и характеристик передаваемых сигналов, чтобы позволить терминалу UE декодировать идентификатор ID ячейки. Этот идентификатор ID ячейки может быть идентификатором ID физической ячейки или идентификатором ID виртуальной ячейки. Идентификатор ID ячейки можно также рассматривать как идентификатор узла eNB или применять другой термин. Сигнал DS предназначен для того, чтобы терминал UE мог также уточнить идентификатор узла eNB (и, следовательно, ячейки), передавшего этот сигнал DS.
Кодирование/декодирование идентификатора ID ячейки из сочетания сигналов, составляющих сигнал DS, может быть произведено различными способами, а настоящее изобретение не указывает конкретно, как именно эти сигналы должны кодировать/декодировать идентификатор ID ячейки. Однако далее описаны возможные варианты (опции), которые могут быть использованы для создания конкретного отображения нужного идентификатора ID ячейки на различные сочетания параметров сигналов. Отметим, что вариации некоторых или всех этих параметров могут быть использованы для передачи терминалу UE сообщения, чтобы этот терминал UE смог декодировать идентификатор ID ячейки на основе переданных/принятых сигналов.
Оба - первичный и вторичный синхросигналы построены так, чтобы их могли обнаружить терминалы UE. Эти синхросигналы занимают 62 поднесущие в канале, что делает процедуру поиска ячейки независимой от ширины полосы канала. Поднесущие первичного синхросигнала модулированы с использованием последовательности Задова-Чу (Zadoff-Chu Sequence) в частотной области. Каждая поднесущая имеет одинаковый уровень мощности, но ее фаза определена номером показателя корня в генераторе последовательности, как это задано в Технических условиях 3GPP TS 36.211.
В некоторых вариантах кодирование последовательности Задова-Чу изменено для передачи информации. Таким образом, характер принимаемой последовательности Задова-Чу может быть использован для передачи информации терминалу UE и может служить частью информации, используемой для кодирования/декодирования идентификатора ID ячейки. Хотя в действующих технических условиях требуется, чтобы синхросигнал PSS всегда был передан в одном и том же символе в одном и том же слоте, при использовании сигнала DS в настоящем изобретении символ может быть в некоторых вариантах изменен, чтобы также специфицировать часть информации, используемой для кодирования/декодирования идентификатор ID ячейки.
Код вторичного сигнала использует перемежаемую конкатенацию двух двоичных последовательностей длиной 31, как это определено в Технических условиях 3GPP TS 36.211. Аналогично сигналу PSS, код, используемый для сигнала SSS, может передавать терминалу UE информацию и служить частью информации, используемой для кодирования/декодирования идентификатора ID ячейки. Также аналогично сигналу PSS, слот, применяемый для передачи сигнала SSS, может быть использован для передачи информации терминалу UE.
Сигнал CRS передают в один или несколько физических портов. В общем случае, этот сигнал используется для целей демодуляции и измерений, а его структура обеспечивает точность оценки характеристики канала. При использовании в качестве части сигнала DS сигнал CRS может передавать терминалу UE информацию на основе того, в каком именно субкадре, слоте, поднесущей осуществляется передача этого сигнала CRS. Более того, антенный порт, используемый для передачи сигнала CRS, когда этот сигнал передают в качестве части сигнала DS, также может варьироваться, хотя, как показано выше, некоторые варианты фиксируют этот антенный порт.
В общем случае ячейка может быть конфигурирована с одним, двумя, четырьмя и восемью сигналами CSI-RS (передаваемыми через один, два, четыре или восемь антенных портов соответственно). Точная структура сигнала CSI-RS, включая точный набор ресурсных элементов, используемых для сигнала CSI-RS в ресурсном блоке, зависит от числа таких сигналов CSI-RS, конфигурированных внутри ячейки, а также может быть различной в разных ячейках. Более конкретно, в паре ресурсных блоков имеются 40 возможных позиций для опорных символов сигнала CSI-RS и, в какой-либо конкретной ячейке, для передачи сигнала CSI-RS используется подмножество соответствующих ресурсных элементов.
При использовании в качестве части сигнала DS характеристики сигнала CSI-RS могут варьироваться для передачи информации терминалу UE. Таким образом, число используемых сигналов CSI-RS, набор используемых ресурсных элементов и т.п. могут варьироваться с целью кодирования информации для терминала UE.
Таким образом, какие именно сигналы входят в состав сигнала DS, и характеристики этих сигналов могут варьироваться для передачи информации терминалу UE, чтобы позволить этому терминалу UE декодировать идентификатор ID ячейки передающего узла eNB. Более того, любая ячейка может быть активна или переведена в неактивное состояние для конкретного терминала UE. Когда ячейка находится в неактивном состоянии, такая как неактивная вторичная ячейка, терминал UE может сделать определенные предположения при приеме сигнала DS. В одном из вариантов, за исключением передач сигнала обнаружения терминалу UE нет необходимости допускать, что производится передача синхросигналов PSS, SSS, физического вещательного канала (РВСН), сигнала CRS, физического канала индикатора формата управления (Physical Control Format Indicator Channel (PCFICH)) и сигнала CSI-RS от вторичной ячейки до тех пор, пока не будет принят субкадр с командой активизации.
Фиг. 7 иллюстрирует пример репрезентативного сигнала DS согласно некоторым вариантам. Этот чертеж может показывать, например, когда используется дуплексный режим с разделением по частоте (FDD) (т.е. структура кадра Типа 1). В этом примере сигнал DS состоит из одного субкадра 700 и передача этого сигнала является балансной в том смысле, что все выбранные сигналы передают в этом субкадре 700. Показано, что субкадр 700 содержит шесть ресурсных блоков 702, каждый из которых имеет по 12 поднесущих (не показаны). Субкадр 700 содержит 14 ODFM-символов 704. Выбранный сигнал DS содержит сигнал PSS 706, сигнал SSS 708, сигнал CRS 710 и сигнал CSI-RS 712. Эта иллюстрация была выбрана, чтобы показать, что все четыре вида сигналов, потенциально составляющих сигнал DS, могут быть переданы в одном субкадре для кадра типа 1. Безусловно, в состав сигнала DS могут входить меньше чем все эти сигналы, например, сигнал PSS 706, сигнал SSS 708 и сигнал CRS 710, либо какое-нибудь другое сочетание в других вариантах.
Общее число поднесущих в слоте равно 72 (6* 12) и, как указано выше, сигнал PSS 706 и сигнал SSS 708 передают с использованием 62 поднесущих и каждую кодируют с использованием некоего кода, такого кода, как коды, описанные в Технических условиях TS 36.211. Таким образом, показано, что синхросигналы PSS 706 и SSS 708 занимают значительную часть 72 поднесущих из полосы сигнала. В иллюстрируемом варианте сигнал PSS 706 передают в символе 5, а сигнал SSS 708 передают в символе 6. Это является отличием от действующих современных систем, в которых имеет место обратный порядок передачи сигналов (сигнал SSS 708 в символе 5 и сигнал PSS 706 в символе 6). Переключение порядка передачи сигналов должно помочь существующему терминалу UE избежать ошибки относительно роли, которую играют синхросигналы PSS 706 и SSS 708 в предлагаемом новом сигнале DS. На деле, если использовать идентифицированные позиции, сигнал DS можно построить с использованием только синхросигналов PSS 706 и SSS 708 таким образом, чтобы не оказать нежелательного влияния на работу существующих терминалов.
Как обсуждается выше, сигнал CRS 710 передают через конкретный антенный порт и в конкретном ресурсном блоке. Этот сигнал CRS 710 может не занимать все поднесущие в своем ресурсном блоке, но для простоты иллюстрации на Фиг. 7 показано, что сигнал CRS 710 передают в конкретном ресурсном блоке. Как обсуждалось ранее, сигнал CRS 710 может передавать информацию терминалу UE на основе того, в каком субкадре, каком слоте, на какой поднесущей (их), через какой порт (ы) и т.д. передают этот сигнал. В репрезентативном примере, показанном на Фиг. 7, сигнал CRS 710 передают через антенный порт 0 и в идентифицированном символе и поднесущей.
Сигнал CSI-RS 712 в чем-то похож на сигнал CRS 710 в том смысле, что ячейка может быть конфигурирована с одним, двумя, четырьмя или восемью сигналами CSI-RS (передаваемыми через один, два, четыре или восемь антенных портов, соответственно) и использовать конкретный набор ресурсных элементов. В иллюстрируемом варианте сигнал CSI-RS может занимать не все поднесущие в иллюстрируемом ресурсном блоке. Сигнал CSI-RS может передавать информацию терминалу UE на основе числа таких сигналов CSI-RS, субкадра, слота, поднесущей (их), порта (ов) и т.п., используемых для передачи этого сигнала CSI-RS. В репрезентативном примере, показанном на Фиг. 7, сигнал CSI-RS передают через один антенный порт и в показанном символе и поднесущей (их).
Фиг. 8 иллюстрирует другой пример репрезентативного сигнала DS согласно некоторым вариантам. Этот чертеж может показывать, например, когда используется дуплексный режим с разделением времени (TDD) (т.е. структура кадра типа 2). Иллюстрируемый пример показывает, как правило, использующее два или более субкадров для структуры кадра типа 2, может выглядеть в некоторых вариантах. Иллюстрируемый пример 800 содержит два субкадра 802 и 804. Если для структуры кадра Типа 2 действуют следующие правила:
1. Сигнал CRS передают через антенный порт 0 в слоте DwPTS во всех специальных субкадрах в составе события сигнала обнаружения (DS).
2. Сигнал PSS передают во втором субкадре периода для структуры кадра типа 2.
3. Сигнал SSS передают в первом субкадре в составе события сигнала обнаружения (DS).
4. Сигнал CSI-RS с ненулевой мощностью передают в нулевом или большем числе субкадров в течение указанного периода.
Тогда иллюстрация на Фиг. 8 показывает один из вариантов того, что может произойти. Второй субкадр 804 представляет собой специальный субкадр, так что сигнал CRS 810 передают через антенный порт 0 во время слота DwPTS (это первый «слот» в специальном субкадре). Сигнал PSS 812 передают во втором субкадре, передача происходит в «слоте» UpPTS этого специального субкадра. В результате сигнал CSI-RS 806 и сигнал SSS 808 остаются для передачи в указанном первом субкадре, каждый в некоем слоте.
Хотя показано, что различные сигналы передаются в некотором слоте в пределах субкадра, эти сигналы могут заполнять или не заполнять свой слот целиком, и, за исключением сигнала CRS 810, они могут быть назначены любому слоту в субкадре. Другие варианты могут использовать другое число субкадров и могут организовать передачу различных сигналов другим способом.
Фиг. 9 иллюстрирует пример узла eNB 900, передающего пример сигнала DS 910, и пример терминала UE 902, принимающего пример сигнала DS 910 согласно некоторым вариантам. Как указано выше, узел eNB 900 идентифицирует входные параметры, необходимые для создания нужного сигнала DS, на операции 904. К таким входным параметрам могут относиться тип кадра (т.е. тип 1 или тип 2), идентификатор ячейки, который нужно кодировать, и т.п.
На операции 906 узел eNB выбирает опорные сигналы, составляющие сигнал DS, и формирует этот сигнал DS для передачи в соответствии с входными параметрами и с правилами логической схемы селектора сигнала DS, которые указывают, сколько субкадров входит в состав события сигнала обнаружения (DS), какие сигналы следует выбрать для формирования сигнала DS, в каких именно субкадрах передавать сигнал DS, параметры сигналов, которые нужно передать, и т.п., чтобы позволить принимающему терминалу UE 902 идентифицировать существование узла eNB 900 и/или декодировать идентификатор ID ячейки этого узла eNB 900. Примеры правил для определения продолжительности события сигнала обнаружения (DS), для выбора сигналов с целью использования при создании сигнала DS и т.п., могут варьироваться от варианта к варианту. В одном репрезентативном примере событие сигнала обнаружения для ячейки содержит период, имеющий продолжительность:
A. от одного до пяти последовательных субкадров для структуры кадра типа 1
B. от двух до пяти последовательных субкадров для структуры кадра типа 2
где терминал UE может предположить присутствие сигнал обнаружения, состоящего из:
1. специфичных для ячейки опорных сигналов в антенном порте 0 во всех субкадрах нисходящей линии и в слоте DwPTS во всех специальных субкадрах в составе события,
2. первичного синхросигнала в первом субкадре в составе события для структуры кадра типа 1 или во втором субкадре периода для структуры кадра типа 2,
3. вторичного синхросигнала в первом субкадре в составе события, и
4. опорных сигналов CSI с ненулевой мощностью в нулевом или большем числе субкадров в составе события.
Событие сигнала обнаружения может происходить через каждые 40, 80 или 160 мс, хотя объем рассматриваемых вариантов в этом отношении не ограничен. Для целей измерений на основе сигнала обнаружения терминал UE не должен предполагать, что присутствуют какие-либо еще другие сигналы или физические каналы, отличные от сигнала обнаружения. Терминал UE, конфигурированный для выполнения измерений на основе сигнала обнаружения для неактивной вторичной ячейки, не должен предполагать, что, помимо передач сигнала обнаружения, присутствуют еще какие-либо передачи сигналов PSS, SSS, канала РВСН, сигнала CRS, канала PCFICH, и сигнала CSI-RS из этой вторичной ячейки, пока не будет принят субкадр, содержащий команду активизации.
Узел eNB 900 затем передает сигнал DS 910 во время события сигнала обнаружения (DS), как обозначено операцией 908.
Терминал UE 902 также идентифицирует начало события сигнала обнаружения (DS), и, используя входные параметры (операция 912), принимает сигнал DS 910 как обозначено операцией 914. В ходе операции 916 терминал UE 902 идентифицирует сигналы и характеристики, образующие сигнал DS 910. Когда эти сигналы и характеристики будут идентифицированы, терминал UE 902 сможет идентифицировать существование узла eNB 900 и декодировать идентификатор ID ячейки этого узла eNB 900.
Фиг. 10 иллюстрирует пример логической схемы способа 1000, используемого узлом eNB для создания и передачи репрезентативного сигнала DS, согласно некоторым вариантам. Это пример более подробного описания работы узла eNB по сравнению с тем, что показано на Фиг. 9. Способ начинается с операции 1002, а на операции 1004 узел eNB ожидает события сигнала обнаружения (DS). В некоторых вариантах некоторые или все операции, показанные на Фиг. 10, могут быть выполнены прежде появления события сигнала обнаружения (DS), а созданный сигнал DS передают в ходе этого события сигнала обнаружения (DS). Другими словами, некоторые операции могут быть выполнены прежде наступления события сигнала обнаружения (DS), так что все или почти все уже готово, когда приходит событие сигнала обнаружения (DS).
В ходе операции 1006 узел eNB вызывает тип кадра и число субкадров для использования в составе сигнала DS. В предположении, что сигнал DS должен содержать сигналы PSS, SSS и CRS (по минимуму), операции 1008, 1010 и 1012 выбирают подходящие параметры для сигналов PSS, SSS и CRS, соответственно, включая субкадр, который должен быть использован, вместе со слотом, символом, кодом и какими-либо другими подходящими параметрами и характеристиками сигнала для использования при формировании сигнала DS.
В ходе операции 1014 выбирают параметры и характеристики для сигнала CSI-RS, если нужно использовать один или несколько сигналов CSI-RS.
В ходе операции 1016 передают сигнал DS в соответствии с параметрами, характеристиками и т.п., выбранными на операциях, описанных выше. После этого способ завершает работу на операции 1008 до тех пор, пока не произойдет следующее событие сигнала обнаружения (DS).
Фиг. 11 иллюстрирует пример логической схемы способа 1100, используемого терминалом UE для приема и декодирования репрезентативного сигнала DS согласно некоторым вариантам. Осуществление способа начинается с операции 1102, а сигнал DS принимают в ходе операции 1104. Тогда терминал UE начинает процедуру распознавания, какие именно сигналы были переданы как часть сигнала DS, и идентификации характеристик этих сигналов. В некоторых вариантах идентификация какого-нибудь конкретного сигнала и/или характеристик этого сигнала может быть частью процедуры приема сигнала. В других вариантах идентификация какого-нибудь конкретного сигнала и/или характеристик этого сигнала осуществляется после приема этого сигнала. Еще в одной группе вариантов идентификация некоторых сигналов и/или характеристик сигналов является частью процедуры приема, а идентификация других сигналов и/или характеристик осуществляется уже после приема.
В ходе операций 1106, 1108, 1110 и 1112 идентифицируют присутствие сигналов PSS, SSS, CRS и CSI-RS, если они имеются в составе сигнала DS, вместе с основными характеристиками каждого сигнала, если потребуется. Поскольку разные сигналы DS могут содержать различные составляющие сигналы и иметь различные характеристики этих составляющих сигналов, приемник терминала UE идентифицирует и присутствие составляющих сигналов, и, если потребуется, их основные характеристики.
Когда терминал UE идентифицирует, какие именно сигналы были приняты как часть сигнала DS, и основные характеристики принятых сигналов, если потребуется, этот терминал UE сможет тогда декодировать идентификатор ID ячейки, как обозначено операцией 1114.
Способ завершает работу на операции 1116 до тех пор, пока не произойдет следующее событие сигнала обнаружения (DS).
Фиг. 12 иллюстрирует блок-схему примера системы согласно некоторым вариантам. Фиг. 12 иллюстрирует блок-схему различных устройств, таких как репрезентативный узел eNB 1200 и репрезентативный терминал UE 1202. Такие устройства могут представлять собой, например, узлы eNB и терминалы UE, описываемые на Фиг. 1-11. Оба устройства аналогичны по структуре за исключением того, что узел eNB 1200 имеет соединение с опорной сетью, такое как сетевое соединение 1204.
Устройство 1200 может содержать процессор 1208, запоминающее устройство 1210, приемопередатчик 1206, одну или несколько антенн 1209, команды 1212 и, возможно, другие компоненты (не показаны). Устройство 1202 может содержать процессор 1220, запоминающее устройство 1222, приемопередатчик 1218, одну или несколько антенн 1221, команды 1224 и, возможно, другие компоненты (не показаны).
Каждый из процессоров 1208 и 1220 содержит один или несколько следующих компонентов - центральных процессоров (CPU), графических процессоров (GPU), усовершенствованных процессоров (APU) или различных сочетаний этих устройств. Процессоры 1208 и 1220 предоставляют функциональные возможности обработки данных и управления для устройств 1200 и 1202, соответственно. Каждое из запоминающих устройств 1210 и 1222 содержит один из несколько модулей памяти для сохранения команд 1212 и 1224 и данных для устройств 1200 и 1202, соответственно. Предлагаемые здесь, например, на логических схемах, представленных на Фиг. 10 и 11, способы и другие описываемые здесь функциональные возможности могут быть реализованы в виде программного обеспечения для временного или постоянного программирования процессоров 1208 и 1220 и других компонентов устройств 1200 и 1202 для работы в соответствии с настоящим изобретением.
Приемопередатчики 1206 и 1218 содержат одно или несколько приемопередающих устройств, в состав которых, для подходящих узла eNB или терминала UE (соответственно), входят схемы для поддержки антенн 1209, 1221 с несколькими входами и выходами (multiple-input and multiple-output (MIMO)) с целью поддержки связи в режиме МIМО. В устройстве 1200 приемопередатчик 1206 осуществляет прием и передачу сообщений и других сигналов, а в устройстве 1202 приемопередатчик 1218 выполняет аналогичные функции. Каждый из приемопередатчиков 1206 и 1218 содержит приемник, подходящий для узла eNB или UE в зависимости от конкретного исполнения. Приемопередатчик 1206 связан с антеннами 1209, а приемопередатчик 1218 связан с антеннами 1221, представляющими одну или несколько антенн, как это подходит для соответствующих устройств.
Команды 1212, 1224 содержат один или несколько наборов команд или программное обеспечение, выполняемое на компьютерном устройстве (или машине), так что при выполнении этих команд или программного обеспечения такое компьютерное устройство (или машина) осуществляет один или несколько описываемых здесь способов, таких как операции, рассмотренные применительно к узлу eNB, терминалу UE, логическим схемам, приведенным выше, и т.д. Команды 1212, 1224 (также именуемые командами, выполняемыми компьютером или машиной) во время выполнения этих команд устройствами 1200 и 1202, соответственно, могут быть резидентными, полностью или по меньшей мере частично, в процессорах 1208, 1220 и/или в запоминающих устройствах 1210, 1222. Эти процессоры 1208, 1220 и запоминающие устройства 1210, 1222 являются также примерами машиночитаемых носителей информации. Различные сочетания процессора, запоминающего устройства, команд, приемопередающих схем и т.п. являются репрезентативными примерами аппаратных процессорных схем.
На Фиг. 12 функциональные возможности обработки данных и управления показаны так, что их реализуют процессоры 1208, 1220 с использованием ассоциированных команд 1212, 1224, соответственно. Однако это всего лишь примеры процессорных устройств, содержащих программируемые логические устройства или другие схемы (например, такие, какие входят в состав процессора общего назначения или другого программируемого процессора), временно конфигурируемые посредством загружаемого или встроенного программного обеспечения для выполнения определенных операций. В различных вариантах процессорные схемы могут содержать специализированные схемы или логические устройства, постоянно конфигурированные (например, в составе процессоров специального назначения, специализированных интегральных схем (application specific integrated circuit (ASIC)) или матриц) для выполнения определенных операций. Должно быть понятно, что принятие решения о физической реализации процессорной схемы в виде специализированной или постоянно конфигурированной схемы, либо в виде временно конфигурируемой схемы (например, конфигурируемой посредством программного обеспечения) может зависеть от, например, стоимости, времени, использовании энергии и эффективности такого использования, размеров корпуса и других подобных соображений.
Соответственно, следует понимать, что термин «процессорная схема» обозначает некий материальный объект, который физически построен, постоянно конфигурирован (например, посредством постоянного монтажа) или временно конфигурируем (например, программируем) для работы некоторым определенным образом или для выполнения определенных операций, описываемых здесь.
Реферат изобретения составлен в соответствии с положениями 37 C.F.R. Section 1.72(b), требующими, чтобы реферат позволил читателю понять природу и сущность технического решения предлагаемого изобретения. Он составлен с пониманием, что он не будет использован для ограничения или интерпретации объема или смысла Формулы изобретения. Прилагаемая Формула изобретения этим включен в подробное описание, причем каждый пункт Формулы является самостоятельным, как отдельный вариант.
Термин «компьютерный носитель информации», «машиночитаемый носитель информации» и другие подобные термины следует понимать, как охватывающий один носитель или несколько носителей (например, централизованную или распределенную базу данных и/или ассоциированные кэши и серверы) для сохранения одного или нескольких наборов команд. Эти термины следует также понимать, как включающие любой носитель, способный сохранять, кодировать или переносить набор команд для выполнения машиной, так что при выполнении этих команд машина осуществляет один или несколько способов согласно настоящему изобретению. Термин «компьютерный носитель информации» и «машиночитаемый носитель информации» следует соответственно понимать, как включающий «компьютерный носитель для хранения информации», «машинный носитель для хранения информации» или другой подобный объект (к материальным источникам относятся твердотельные запоминающие устройства, оптические и магнитные носители или другие материальные устройства и носители, но исключая при этом сигналы, как они есть, сигналы несущих и другие нематериальные источники), а также «компьютерный носитель для передачи данных», «машинный носитель для передачи данных» и т.п. (к нематериальным источникам относятся сигналы, как они есть, сигналы несущих и т.п.).
Должно быть понятно, что, для большей ясности, приведенное выше описание рассматривает некоторые варианты со ссылками на различные функциональные модули или процессоры. Однако также должно быть понятно, что любое подходящее распределение функциональных возможностей между разными функциональными модулями, процессорами или областями может быть использовано, не отклоняясь от вариантов настоящего изобретения. Например, функции, показанные как выполняемые посредством отдельных процессоров или контроллеров, могут быть выполнены одним и тем же процессором или контроллером. Следовательно, ссылки на конкретные функциональные модули следует рассматривать только как ссылки на подходящие средства для выполнения описываемых функций, а не как указания на жесткую логическую или физическую структуру или организацию.
Хотя настоящее изобретение было описано в связи с некоторыми вариантами, оно не ограничивается конкретными формами, рассмотренными здесь. Специалист в этой области должен понимать, что различные признаки описываемых вариантов могут быть объединены согласно настоящему изобретению. Более того, должно быть понятно, что специалисты в этой области могут внести разнообразные модификации и изменения без отклонений от объема настоящего изобретения.
Далее представлены различные примеры вариантов.
Пример 1. Усовершенствованный узел В (eNB), содержащий аппаратную процессорную схему, конфигурированную по меньшей мере для: идентификации начала события сигнала обнаружения (DS), где это событие сигнала обнаружения (DS) содержит последовательность субкадров; выбора сигнала DS для передачи во время события сигнала обнаружения (DS), где сигнал DS содержит: специфичный для ячейки опорный сигнал (CRS); первичный синхросигнал (PSS); и вторичный синхросигнал (SSS); и передачи сигнала DS во время события сигнала обнаружения (DS), сигнал DS идентифицирует узел eNB для терминала UE, принимающего сигнал DS.
Пример 2. Узел eNB из примера 1, отличающийся тем, что последовательность субкадров содержит от одного до пяти субкадров для структуры кадра типа 1.
Пример 3. Узел eNB из примера 1, отличающийся тем, что последовательность субкадров содержит от двух до пяти субкадров для структуры кадра типа 2.
Пример 4. Узел eNB из примеров 1, 2 или 3, отличающийся тем, что сигнал DS содержит: сигнал CRS в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, передаваемый в субкадре PSS из последовательности субкадров, этот субкадр PSS выбирают на основе типа структуры кадра; и синхросигнал SSS, передаваемый в кадре SSS в последовательности субкадров.
Пример 6. Узел eNB из примера 4, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 7. Узел eNB из примера 4, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 8. Узел eNB из примера 4, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 9. Узел eNB из примера 1 отличающийся тем, что сигнал DS содержит: синхросигнал PSS, передаваемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, передаваемый в первом субкадре в последовательности субкадров; сигнал CRS, передаваемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 10. Узел eNB из примера 9, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, передаваемый по меньшей мере в одной из последовательностей субкадров.
Пример 11. Узел eNB из примеров 1, 2 или 3, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 12. Узел eNB из примеров 1, 2 или 3, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.
Пример 13. Устройство, содержащее: по меньшей мере одну антенну; приемопередающую схему, связанную по меньшей мере с одной антенной; запоминающее устройство; процессор, связанный с запоминающим устройством и с приемопередающей схемой; и команды, сохраняемые в запоминающем устройстве, так что при выполнении этих команд процессор осуществляет операции, содержащие: определение типа структуры кадров; определение продолжительности события сигнала обнаружения (DS), где эта продолжительность составляет от одного до пяти субкадров для структуры кадров типа 1 и где эта продолжительность составляет от двух до пяти субкадров для структуры кадров типа 2; идентификацию начала события сигнала обнаружения (DS); выбор сигнала DS для передачи во время события сигнала обнаружения (DS), где этот сигнал DS содержит: первичный синхросигнал (PSS), передаваемый в первом субкадре для структуры кадров типа 1 или во втором субкадре для структуры кадров типа 2; вторичный синхросигнал (SSS), передаваемый в первом субкадре; специфичный для ячейки опорный сигнал (CRS), передаваемый во всех субкадрах нисходящей линии в составе события сигнала обнаружения (DS) или в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в составе события сигнала обнаружения (DS); и опорный сигнал информации о состоянии канала (CSI-RS), передаваемый нулевом или большем числе субкадров в составе события сигнала обнаружения (DS); и передача сигнала DS во время события сигнала обнаружения (DS) во время назначенных субкадров.
Пример 14. Способ, осуществляемый усовершенствованным узлом В (eNB) и содержащий: идентификацию начала события сигнала обнаружения (DS), где это событие сигнала обнаружения (DS) содержит последовательность субкадров; выбор сигнала DS для передачи во время события сигнала обнаружения (DS), где этот сигнал DS содержит: специфичный для ячейки опорный сигнал (CRS); первичный синхросигнал (PSS); и вторичный синхросигнал (SSS); и передачу сигнала DS во время события сигнала обнаружения (DS), этот сигнал DS идентифицирует узел eNB для терминала UE, принимающего сигнал DS.
Пример 15. Способ из примера 14, отличающийся тем, что последовательность субкадров содержит от одного до пяти субкадров для структуры кадра типа 1.
Пример 16. Способ из примера 14, отличающийся тем, что последовательность субкадров содержит от двух до пяти субкадров для структуры кадра типа 2.
Пример 17. Способ из примеров 14, 15 или 16, отличающийся тем, что сигнал DS содержит: сигнал CRS в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, передаваемый в субкадре PSS из последовательности субкадров, где этот субкадр PSS выбирают на основе типа структуры кадра; и синхросигнал SSS, передаваемый в кадре SSS в последовательности субкадров.
Пример 18. Способ из примера 17, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 19. Способ из примера 17, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 20. Способ из примера 17, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 21. Способ из примера 14 отличающийся тем, что сигнал DS содержит: синхросигнал PSS, передаваемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, передаваемый в первом субкадре в последовательности субкадров; сигнал CRS, передаваемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 22. Способ из примера 21, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, передаваемый по меньшей мере в одной из последовательностей субкадров.
Пример 23. Способ из примеров 14, 15 или 16, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 24. Способ из примеров 14, 15 или 16, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.
Пример 25. Компьютерный носитель информации, содержащий команды, которые при выполнении их аппаратной процессорной схемой конфигурируют эту аппаратную схему по меньшей мере для: идентификации начала события сигнала обнаружения (DS), где это событие сигнала обнаружения (DS) содержит последовательность субкадров; выбора сигнала DS для передачи во время события сигнала обнаружения (DS), где этот сигнал DS содержит: специфичный для ячейки опорный сигнал (CRS); первичный синхросигнал (PSS); и вторичный синхросигнал (SSS); и передачи сигнала DS во время события сигнала обнаружения (DS), этот сигнал DS идентифицирует узел eNB для терминала UE, принимающего сигнал DS.
Пример 26. Компьютерный носитель информации из примера 25, отличающийся тем, что последовательность субкадров содержит от одного до пяти субкадров для структуры кадра типа 1.
Пример 27. Компьютерный носитель информации из примера 25, отличающийся тем, что последовательность субкадров содержит от двух до пяти субкадров для структуры кадра типа 2.
Пример 28. Компьютерный носитель информации из примеров 25, 26 или 27, отличающийся тем, что сигнал DS содержит: сигнал CRS в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, передаваемый в субкадре PSS из последовательности субкадров, где этот субкадр PSS выбирают на основе типа структуры кадра; и синхросигнал SSS, передаваемый в кадре SSS в последовательности субкадров.
Пример 29. Компьютерный носитель информации из примера 28, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 30. Компьютерный носитель информации из примера 28, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 31. Компьютерный носитель информации из примера 28, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 32. Компьютерный носитель информации из примера 25, отличающийся тем, что сигнал DS содержит: синхросигнал PSS, передаваемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, передаваемый в первом субкадре в последовательности субкадров; сигнал CRS, передаваемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 33. Компьютерный носитель информации из примера 9, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, передаваемый по меньшей мере в одной из последовательностей субкадров.
Пример 34. Компьютерный носитель информации из примеров 25, 26 или 27, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 35. Компьютерный носитель информации из примера 25, 26 или 27, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.
Пример 36. Абонентский терминал (UE), содержащий аппаратную процессорную схему, конфигурируемую по меньшей мере для: идентификации начала события сигнала обнаружения (DS); приема сигнала DS, передаваемого во время события сигнала обнаружения (DS), где этот сигнал DS содержит: первичный синхросигнал (PSS); вторичный синхросигнал (SSS); и специфичный для ячейки опорный сигнал (CRS); и определения идентификатора усовершенствованного узла В (eNB) на основе принятого сигнала DS.
Пример 37. Абонентский терминал UE из примера 36, отличающийся тем, что аппаратная процессорная схема дополнительно конфигурирована для идентификации типа структуры кадра, и отличающийся тем, что продолжительность события сигнала обнаружения (DS) основана на типе структуры кадра.
Пример 38. Абонентский терминал UE из примера 37, отличающийся тем, что продолжительность события соответствует продолжительности от одного до пяти субкадров для структуры кадра типа 1.
Пример 39. Абонентский терминал UE из примера 37, отличающийся тем, что продолжительность события соответствует продолжительности от двух до пяти субкадров для структуры кадра типа 2.
Пример 40. Абонентский терминал UE из примеров 36, 37, 38 или 39, отличающийся тем, что сигнал DS содержит: сигнал CRS, принимаемый в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, принимаемый в субкадре PSS из последовательности субкадров, где этот субкадр PSS выбран на основе типа структуры кадра; и синхросигнал SSS, принимаемый в кадре SSS в последовательности субкадров.
Пример 41. Абонентский терминал UE из примера 40, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 42. Абонентский терминал UE из примера 40, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 43. Абонентский терминал UE из примера 40, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 44. Абонентский терминал UE из примера 36, отличающийся тем, что сигнал DS содержит: синхросигнал PSS, принимаемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, принимаемый в первом субкадре в последовательности субкадров; сигнал CRS, принимаемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 45. Абонентский терминал UE из примера 44, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, принимаемый по меньшей мере в одной из последовательностей субкадров.
Пример 46. Абонентский терминал UE из примеров 36, 37, 38, 39 или 44, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 47. Абонентский терминал UE из примеров 36, 37, 38, 39 или 44, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.
Пример 48. Способ, осуществляемый абонентским терминалом (UE) и содержащий: идентификацию начала события сигнала обнаружения (DS); прием сигнала DS, передаваемого во время события сигнала обнаружения (DS), где этот сигнал DS содержит: первичный синхросигнал (PSS); вторичный синхросигнал (SSS); и специфичный для ячейки опорный сигнал (CRS); и определение идентификатора усовершенствованного узла В (eNB) на основе принятого сигнала DS.
Пример 49. Способ из примера 48, дополнительно содержащий идентификацию типа структуры кадра, и отличающийся тем, что продолжительность события сигнала обнаружения (DS) основана на типе структуры кадра.
Пример 50. Способ из примера 49, отличающийся тем, что продолжительность события соответствует продолжительности от одного до пяти субкадров для структуры кадра типа 1.
Пример 51. Способ из примера 49, отличающийся тем, что продолжительность события соответствует продолжительности от двух до пяти субкадров для структуры кадра типа 2.
Пример 52. Способ из примеров 48, 49, 50 или 51, отличающийся тем, что сигнал DS содержит: сигнал CRS, принимаемый в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, принимаемый в субкадре PSS из последовательности субкадров, этот субкадр PSS выбран на основе типа структуры кадра; и синхросигнал SSS, принимаемый в кадре SSS в последовательности субкадров.
Пример 53. Способ из примера 52, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 54. Способ из примера 52, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 55. Способ из примера 52, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 56. Способ из примера 48, отличающийся тем, что сигнал DS содержит: синхросигнал PSS, принимаемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, принимаемый в первом субкадре в последовательности субкадров; сигнал CRS, принимаемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 57. Способ из примера 44, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, принимаемый по меньшей мере в одной из последовательностей субкадров.
Пример 58. Способ из примеров 48, 49, 50, 51 или 56, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 59. Способ из примеров 48, 49, 50, 51 или 56, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.
Пример 60. Компьютерный носитель информации, содержащий команды, которые при выполнении их аппаратной процессорной схемой конфигурируют эту аппаратную схему по меньшей мере для: идентификации начала события сигнала обнаружения (DS); приема сигнала DS, передаваемого во время события сигнала обнаружения (DS), где этот сигнал DS содержит: первичный синхросигнал (PSS); вторичный синхросигнал (SSS); и специфичный для ячейки опорный сигнал (CRS); и определения идентификатора усовершенствованного узла В (eNB) на основе принятого сигнала DS.
Пример 61. Компьютерный носитель информации из примера 60, отличающийся тем, что выполняемые команды дополнительно конфигурируют аппаратную процессорную схему для идентификации типа структуры кадра, и отличающийся тем, что продолжительность события сигнала обнаружения (DS) основана на типе структуры кадра.
Пример 62. Компьютерный носитель информации из примера 61, отличающийся тем, что продолжительность события соответствует продолжительности от одного до пяти субкадров для структуры кадра типа 1.
Пример 63. Компьютерный носитель информации из примера 61, отличающийся тем, что продолжительность события соответствует продолжительности от двух до пяти субкадров для структуры кадра типа 2.
Пример 64. Компьютерный носитель информации из примеров 60, 61, 62 или 63, отличающийся тем, что сигнал DS содержит: сигнал CRS, принимаемый в назначенном антенном порте в составе субкадра CRS из последовательности субкадров; синхросигнал PSS, принимаемый в субкадре PSS из последовательности субкадров, этот субкадр PSS выбран на основе типа структуры кадра; и синхросигнал SSS, принимаемый в кадре SSS в последовательности субкадров.
Пример 65. Компьютерный носитель информации из примера 64, отличающийся тем, что субкадр PSS и субкадр SSS представляют собой первый субкадр в последовательности субкадров.
Пример 66. Компьютерный носитель информации из примера 64, отличающийся тем, что субкадр PSS представляет собой второй субкадр в последовательности субкадров, а субкадр SSS представляет собой первый субкадр в последовательности субкадров.
Пример 67. Компьютерный носитель информации из примера 64, отличающийся тем, что субкадр CRS представляет собой субкадр нисходящей линии или субкадр, содержащий слот для пилот-сигнала нисходящей линии (DwPTS).
Пример 68. Компьютерный носитель информации из примера 60, отличающийся тем, что сигнал DS содержит: синхросигнал PSS, принимаемый в первом субкадре в последовательности субкадров для структуры кадров типа 1 или во втором субкадре в последовательности субкадров для структуры кадров типа 2; синхросигнал SSS, принимаемый в первом субкадре в последовательности субкадров; сигнал CRS, принимаемый через антенный порт 0 во всех субкадрах нисходящей линии в последовательности субкадров и в слотах для пилот-сигнала нисходящей линии (DwPTS) в специальных субкадрах в последовательности субкадров.
Пример 69. Компьютерный носитель информации из примера 68, отличающийся тем, что сигнал DS дополнительно содержит сигнал CSI-RS, принимаемый по меньшей мере в одной из последовательностей субкадров.
Пример 70. Компьютерный носитель информации из примеров 60, 61, 62, 63 или 68, отличающийся тем, что событие сигнала обнаружения (DS) происходит на периодической основе.
Пример 71. Компьютерный носитель информации из примеров 60, 61, 62, 63 или 68, отличающийся тем, что событие сигнала обнаружения (DS) происходит через каждые 40 мс или 80 мс или 160 мс.

Изобретение относится к технике связи и может использоваться в системах беспроводной связи. Технический результат состоит в повышении надежности связи. Для этого предложенные варианты изобретения позволяют выбирать сигнал обнаружения (DS), используемый для идентификации узла eNB для терминала UE, принимающего сигнал DS. Этот сигнал DS позволяет терминалу UE убедиться в факте присутствия и/или определить идентификатор ячейки узла eNB. Сигнал DS содержит несколько других сигналов, таких как первичный синхросигнал (PSS), вторичный синхросигнал (SSS), специфичный для ячейки опорный сигнал (CRS) и/или опорный сигнал информации о состоянии канала (CSI-RS). Событие сигнала обнаружения (DS) содержит несколько субкадров, в которых передают выбранные сигналы, имеющие сигнал DS. Подбор сигналов, выбранных для сигнала DS, их характеристики и свойства позволяют терминалу UE декодировать идентификатор ячейки. Событие сигнала обнаружения (DS) происходит с заданной периодичностью. 3 н. и 17 з.п. ф-лы, 12 ил., 1 табл.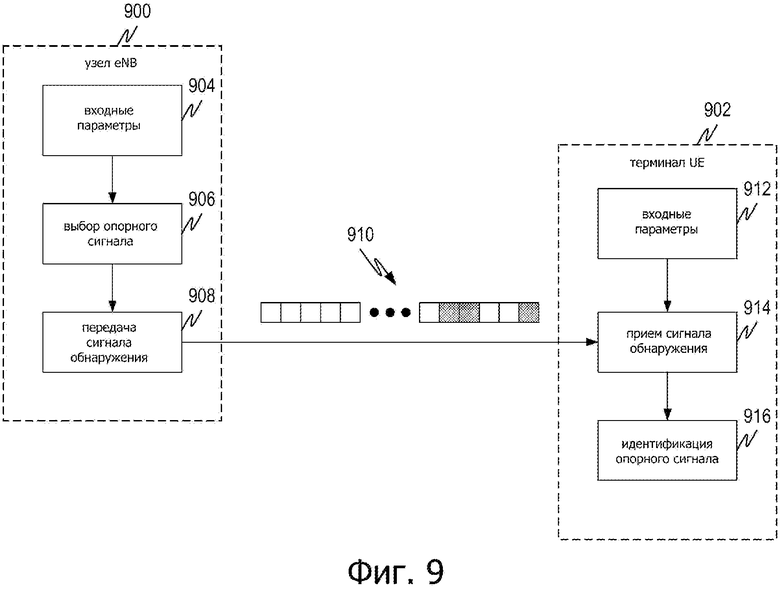
1. Устройство для абонентского терминала (UE), это устройство содержит: процессорную схему; и память, процессорная схема конфигурирована для:
декодирования сообщения, которое содержит значение, указывающее периодичность событий сигнала (DS) обнаружения;
декодирования сигнала DS, переданного во время событий DS, сигнал DS содержит:
специфичный для ячейки опорный сигнал (CRS) в субкадре нисходящей линии;
первичный синхросигнал (PSS); и
вторичный синхросигнал (SSS),
отличающееся тем, что процессорная схема дополнительно конфигурирована для определения идентификационной информации усовершенствованного узла B (eNB) на основе сигнала DS.
2. Устройство по п. 1, отличающееся тем, что периодичность равна или 40 миллисекундам, или 80 миллисекундам, или 160 миллисекундам.
3. Устройство по п. 1, отличающееся тем, что событие DS содержит период длительностью:
от одного до пяти последовательных субкадров для структуры кадра типа 1 и
от двух до пяти последовательных субкадров для структуры кадра типа 2.
4. Устройство по п. 3, отличающееся тем, что для структуры кадра типа 1 синхросигнал PSS принимают в первом субкадре события DS, а для структуры кадра типа 2 синхросигнал PSS принимают во втором субкадре события DS.
5. Устройство по п. 3, отличающееся тем, что сигнал DS содержит
опорный сигнал (CSI-RS) информации о состоянии канала ненулевой мощности, принимаемый в нулевом или большем числе субкадров в течение указанного периода.
6. Устройство по п. 1, отличающееся тем, что синхросигналы PSS и SSS принимают в одном и том же субкадре в последовательности субкадров, и отличающееся тем, что синхросигнал PSS передают прежде синхросигнала SSS в этом субкадре.
7. Устройство по п. 1, отличающееся тем, что местонахождение синхросигналов PSS, SSS и/или сигнала CRS во временной области и/или в частотной области основано либо на идентификаторе ячейки, либо на идентификаторе виртуальной ячейки.
8. Компьютерный носитель информации, содержащий команды, которые при выполнении их аппаратной процессорной схемой абонентского терминала (UE) конфигурируют эту аппаратную процессорную схему, по меньшей мере, для:
декодирования сообщения, которое содержит значение, указывающее периодичность событий сигнала (DS) обнаружения, равную или 40 миллисекундам, или 80 миллисекундам, или 160 миллисекундам;
декодирования сигнала DS, принятого во время события DS, сигнал DS содержит:
специфичный для ячейки опорный сигнал (CRS);
первичный синхросигнал (PSS); и
вторичный синхросигнал (SSS).
9. Компьютерный носитель информации по п. 8, отличающийся тем, что команды дополнительно конфигурируют аппаратную процессорную схему с целью соединения с малой ячейкой на основе сигнала DS.
10. Компьютерный носитель информации по п. 8, отличающийся тем, что событие DS содержит период длительностью:
от одного до пяти последовательных субкадров для структуры кадра типа 1 и
от двух до пяти последовательных субкадров для структуры кадра типа 2.
11. Компьютерный носитель информации по п. 10, отличающийся тем, что для структуры кадра типа 1 синхросигнал PSS принимают в первом субкадре события DS, а для структуры кадра типа 2 синхросигнал PSS принимают во втором субкадре события DS.
12. Компьютерный носитель информации по п. 10, отличающийся тем, что сигнал DS содержит сигнал CRS в антенном порте 0 в составе субкадра нисходящей линии или субкадра, содержащего слот (DwPTS) для пилот-сигнала нисходящей линии из события DS; и
отличающийся тем, что сигнал DS содержит опорный сигнал (CSI-RS) информации о состоянии канала ненулевой мощности, передаваемый в нулевом или большем числе субкадров в течение указанного периода.
13. Компьютерный носитель информации по п. 8, отличающийся тем, что синхросигналы PSS и SSS принимают в одном и том же субкадре в последовательности субкадров, и отличающийся тем, что синхросигнал PSS передают прежде синхросигнала SSS в этом субкадре.
14. Компьютерный носитель информации по п. 8, отличающийся тем, что местонахождение синхросигналов PSS, SSS и/или сигнала CRS во временной области и/или в частотной области основано либо на идентификаторе ячейки, либо на идентификаторе виртуальной ячейки.
15. Устройство для усовершенствованного узла В (eNB), это устройство содержит: приемопередающую схему, которая конфигурирована для:
передачи сигнала, который содержит значение, указывающее периодичность событий сигнала (DS) обнаружения;
передачи во время события DS:
специфичного для ячейки опорного сигнала (CRS);
первичного синхросигнала (PSS); и
вторичного синхросигнала (SSS).
16. Устройство по п. 15, отличающееся тем, что периодичность равна или 40 миллисекундам, или 80 миллисекундам, или 160 миллисекундам.
17. Устройство по п. 15, отличающееся тем, что событие DS содержит период длительностью:
от одного до пяти последовательных субкадров для структуры кадра типа 1 и
от двух до пяти последовательных субкадров для структуры кадра типа 2.
18. Устройство по п. 17, отличающееся тем, что для структуры кадра типа 1 синхросигнал PSS передают в первом субкадре события DS, а для структуры кадра типа 2 синхросигнал PSS передают во втором субкадре события DS.
19. Устройство по п. 17, отличающееся тем, что сигнал DS содержит сигнал CRS в антенном порте 0 в составе субкадра нисходящей линии или субкадра, содержащего слот (DwPTS) для пилот-сигнала нисходящей линии из события DS; и
отличающееся тем, что сигнал DS содержит опорный сигнал (CSI-RS) информации о состоянии канала ненулевой мощности, передаваемый в нулевом или большем числе субкадров в течение указанного периода.
20. Устройство по п. 15, отличающееся тем, что синхросигналы PSS и SSS принимают в одном и том же субкадре в последовательности субкадров, и отличающееся тем, что синхросигнал PSS передают прежде синхросигнала SSS в этом субкадре.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО, СПОСОБ И ПРОГРАММНЫЙ ПРОДУКТ ДЛЯ УКАЗАНИЯ ДЛИНЫ ЦИКЛИЧЕСКОГО ПРЕФИКСА | 2009 |
|
RU2467507C2 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ДВУСТОРОННЕЙ СВЯЗИ И ЦЕНТРАЛЬНЫЙ КОНТРОЛЛЕР ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ СВЯЗИ | 1993 |
|
RU2148891C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

