Область техники, к которой относится изобретение
Настоящее изобретение относится к области формирования рентгеновских изображений в многокадровом режиме и, более конкретно, к области регулирования величины рентгеновского излучения при формировании рентгеновских изображений в многокадровом режиме.
Перекрестная ссылка на родственные патентные заявки
Настоящая патентная заявка испрашивает приоритет и связана с предварительной заявкой на патент США, серийный №61/730,987, поданной 11/29/2012, содержание которой включено в настоящий документ посредством ссылки.
Уровень техники
В типичной системе формирования рентгеновских изображений в многокадровом режиме рентгеновская трубка генерирует рентгеновское излучение в пределах относительно широкого телесного угла. Чтобы избежать ненужного облучения пациента и медицинской бригады, применяют коллиматоры из материалов, поглощающих рентгеновское излучение, таких как свинец, с целью блокирования избыточного излучения. При этом на выходе рентгеновской трубки будет формироваться только необходимый телесный угол полезного излучения, чтобы подвергать облучению только необходимые элементы.
Такие коллиматоры обычно используют в статическом режиме, однако они могут иметь разнообразные конструкции и геометрию рентгеновского излучения. Коллиматоры можно настраивать вручную или автоматически, используя в качестве входных данных, например, размеры среды органов, связанных с данной процедурой.
При формировании рентгеновских изображений в многокадровом режиме ситуация является более динамичной, чем в случае одиночного рентгеновского снимка. Рентгеновское излучение остается активным в течение довольно длительного времени, при этом лечащему врачу обычно приходится находиться рядом с пациентом и, таким образом, рядом с рентгеновским излучением. В связи с этим, желательно обеспечить способы минимизации воздействия на медицинскую бригаду. Были предложены способы уменьшения интенсивности рентгеновского излучения, в которых полученное уменьшенное отношение сигнал/шум рентгеновского изображения компенсируется улучшением изображения цифровыми методами. В других способах предлагается коллиматор, ограничивающий телесный угол рентгеновского излучения частью зоны усилителя изображения, и перемещение коллиматора с целью полной замены входной зоны усилителя изображения, при этом область исследования (ОИ) подвергается облучению в большей степени, чем остальная часть зоны. В этом случае ОИ принимает достаточное сильное излучение для формирования изображения с хорошим отношением сигнал/шум, в то время как остальная часть изображения подвергается воздействию рентгеновского излучения низкой интенсивности, обеспечивая получение изображения с относительно низким отношением сигнал/шум. Размер и расположение ОИ могут определяться множеством способов. Например, она может представлять собой фиксированную зону в центре изображения или автоматически центрироваться относительно наиболее активной зоны изображения, причем эта активность обусловлена временным анализом изображений на основе s-последовательности киноизображений, полученных от видеокамеры системы формирования рентгеновских изображений в многокадровом режиме.
Сущность изобретения
Согласно первому аспекту настоящего изобретения предлагается рентгеновская система, содержащая источник рентгеновского излучения, детектор, монитор для отображения рентгеновского изображения в поле обзора и датчик отслеживания движения глаза, причем указанный датчик отслеживания движения глаза выполнен с возможностью предоставления координат взгляда пользователя в области (зоне) изображения; указанная система выполнена с возможностью определения области исследования ОИ так, чтобы точка взгляда (наблюдения) находилась в указанной ОИ; и оптимизации изображения, отображаемого на указанном мониторе в соответствии с частью изображения, находящейся в пределах указанной ОИ.
Оптимизация изображения может быть осуществлена путем регулирования любых из следующих параметров: тока рентгеновской трубки (в непрерывном или импульсном режиме); пикового анодного напряжения (ПАН) рентгеновской трубки; длины импульса рентгеновских лучей; автоматической регулировки усиления (АРУ), аналоговой или цифровой; тоновоспроизведения изображения, реализованного в виде функции яркости; тоновоспроизведения изображения, реализованного в виде функции контрастности; тоновоспроизведения изображения, реализованного в виде гамма-функции; тоновоспроизведения изображения, реализованного в виде функции смещения; тоновоспроизведения изображения, реализованного в виде линейной функции n-й степени; и тоновоспроизведения изображения, реализованного в виде нелинейной функции.
Рентгеновская система может также включать в себя коллиматор, выполненный с возможностью модификации дозы рентгеновского излучения на пиксель ДНП в поле обзора в соответствии с местоположением точки наблюдения.
Рентгеновская система может также включать в себя коллиматор, выполненный с возможностью модификации дозы на пиксель (ДНП) в поле обзора в соответствии с местоположением точки наблюдения.
Согласно второму аспекту настоящего изобретения предлагается рентгеновская система, содержащая источник рентгеновского излучения, детектор, монитор для отображения рентгеновского изображения и коллиматор; указанный коллиматор выполнен с возможностью подвергать первую зону воздействию первого уровня излучения, а вторую зону - воздействию второго уровня излучения; при этом указанная система выполнена с возможностью обработки указанной второй зоны для превращения ее в зону с параметрами, аналогичными первой зоне, с помощью функции коррекции тона.
Функция коррекции тона может быть одной из по меньшей мере двух функций коррекции тона, каждая из которых связана с конкретным ПАН.
Система может также быть выполнена с возможностью создания функции коррекции тона путем интерполяции двух других функций коррекции тона, каждая из которых связана с конкретным ПАН.
Система может также быть выполнена с возможностью оценки функции коррекции тона для третьей зоны по функции коррекции тона, используемой для указанной второй области.
Для оценки могут применяться экспоненциальные вычисления.
Система может также быть выполнена с возможностью регулировки масштаба входных данных для функции коррекции тона в соответствии с изменениями тока рентгеновской трубки.
Регулировка может осуществляться с использованием коэффициента, равного относительному изменению тока рентгеновской трубки.
Согласно третьему аспекту настоящего изобретения предлагается способ вычисления функции коррекции тона, содержащий следующие шаги: подвергают первую зону воздействию первого рентгеновского излучения, а вторую зону - воздействию второго рентгеновского излучения, причем по меньшей мере часть указанного первого и второго излучения проходит через фантом с переменным поглощением таким образом, чтобы для каждого заданного уровня пропускания указанного фантома существовала по меньшей мере одна зона, подвергаемая воздействию указанного первого излучения, и по меньшей мере одна зона, подвергаемая воздействию указанного второго излучения; для каждого такого заданного уровня пропускания вычисляют среднее значение пикселей; вычисляют соотношение между двумя указанными средними значениями пикселей для всех заданных уровней поглощения; и подбирают функцию для указанных вычисляемых соотношений, чтобы использовать ее в качестве функции коррекции тона.
Фантом с переменным поглощением может представлять собой ступенчатый оптический клин.
Фантом с переменным поглощением может представлять собой фантом переменной толщины с непрерывной наклонной функцией.
Согласно четвертому аспекту настоящего изобретения предлагается способ вычисления функции коррекции тона, содержащий следующие шаги: подвергают какую-то зону воздействию первого рентгеновского излучения, затем подвергают указанную зону воздействию второго рентгеновского излучения, причем указанное первое и второе излучение проходят через человеческую ткань в указанной зоне; вычисляют соотношение между по меньшей мере одним значением пикселя в указанной зоне, соответствующим указанному первому излучению, и аналогичным значением пикселя в указанной зоне, соответствующим указанному второму излучению; подбирают функцию для указанного по меньшей мере одного вычисляемого соотношения и значения пикселя в указанной зоне, соответствующего указанному второму излучению, чтобы использовать ее в качестве первой функции коррекции тона.
Используют больше одной зоны.
Вторую функцию коррекции тона можно вычислить, используя также данные, полученные после сбора данных, используемых для вычисления указанной первой функции коррекции тона.
Данные, используемые для вычисления указанной первой функции коррекции тона, могут быть получены по меньшей мере от 2 пациентов.
Согласно пятому аспекту настоящего изобретения предлагается рентгеновская система, содержащая источник рентгеновского излучения, коллиматор, детектор и монитор, средства для перемещения указанного коллиматора в плоскости, в целом параллельной плоскости указанного коллиматора; указанный коллиматор содержит апертуру, позволяющую всему излучению проходить через нее, внешнюю кольцевую зону, уменьшающую излучение, проходящее через нее, на величину, зависящую от материала и толщины указанной внешней кольцевой зоны, и внутреннюю кольцевую зону между указанной апертурой и указанной внешней кольцевой зоной, с толщиной, изменяющейся в зависимости от расстояния от указанной апертуры, начиная с малой толщины на стороне апертуры и заканчивая толщиной внешней кольцевой зоны на стороне внешней кольцевой зоны; и система, выполненная с возможностью модификации данных изображения, чтобы по существу регулировать изображение, полученное через внутреннюю кольцевую зону, и изображение, полученное через внешнюю кольцевую зону, таким образом, чтобы оно выглядело визуально аналогичным изображению, полученному через указанную апертуру, при этом параметры, используемые для указанных регулировок, зависят от положения указанного коллиматора. Система может быть выполнена с возможностью получения указанных параметров при помощи процедуры калибровки, причем указанная процедура калибровки включает в себя измерения, выполняемые при различных положениях указанного коллиматора. Различные положения коллиматора могут включать в себя различные положения в плоскости коллиматора.
Различные положения коллиматора могут включать в себя различные расстояния от источника рентгеновского излучения.
Толщина внутренней кольцевой зоны может быть по существу симметричной относительно плоскости, находящейся по существу посредине между двумя наружными поверхностями указанной внешней кольцевой зоны.
Система может содержать слой материала, отличного от указанного материала внешней кольцевой зоны, при этом указанный слой расположен в зоне указанной апертуры.
Этот слой может перекрывать по меньшей мере часть указанной внутренней кольцевой зоны.
Согласно шестому аспекту настоящего изобретения предлагается рентгеновская система, содержащая источник рентгеновского излучения, детектор, монитор для отображения рентгеновского изображения, коллиматор и устройство ввода;
причем указанное устройство ввода выполнено с возможностью предоставления координат, относящихся к рентгеновскому изображению; система выполнена с возможностью выбора области изображения в соответствии с указанными координатами и регулирования по меньшей мере одного из следующих параметров в соответствии с указанными координатами: формы указанной области; положения указанной области.
Система может также быть выполнена с возможностью регулирования по меньшей мере одного из следующих параметров, соответствующих указанной области: тока (мА) рентгеновской трубки; заряда (мА-с) рентгеновской трубки; пикового анодного напряжения (ПАН) рентгеновской трубки; яркости указанного рентгеновского изображения; контрастности указанного изображения; и тона указанного изображения.
Устройство ввода может представлять собой по меньшей мере одно из следующих устройств: датчик отслеживания движения глаза; джойстик; клавиатуру; интерактивный дисплей; устройство считывания жестов; и голосовой интерпретатор.
Краткое описание чертежей
Настоящее изобретение будет легче понять с помощью следующих чертежей, на которых:
на фиг. 1А представлено упрощенное схематическое изображение примера расположения клинического оборудования и системы формирования рентгеновских изображений в многокадровом режиме;
на фиг. 1В представлен пример расположения системы, показанной на фиг. 1А, с изображением дополнительных деталей компонентов системы согласно настоящему изобретению;
на фиг. 2 схематически показан пример изображения, отображаемого на мониторе системы формирования рентгеновских изображений в многокадровом режиме;
на фиг. 3 схематически показаны дополнительные аспекты примера системы, представленной на фиг. 1А;
на фиг. 4 схематически показан пример областей рентгеновского облучения детектора применительно к параметрам, представленным на фиг. 3;
на фиг. 5 схематически показан пример коллиматора согласно настоящему изобретению;
на фиг. 6 схематически показан пример облучаемой области усилителя изображения при определенном угле поворота коллиматора, представленного на фиг. 5;
на фиг. 7 схематически показан пример картины освещения (облучения) датчика при определенном угле поворота коллиматора, представленного на фиг. 5;
на фиг. 8 схематически показан пример процесса считывания значений пикселей датчика;
на фиг. 9 схематически показан пример процесса считывания значений пикселя датчика;
на фиг. 10А схематически показан вид сверху примера коллиматора согласно настоящему изобретению;
на фиг. 10В схематически показан вид снизу примера коллиматора, представленного на фиг. 10А;
на фиг. 10С схематически показан вид в поперечном разрезе примера коллиматора, представленного на фиг. 10А;
на фиг. 11А схематически показаны основные части другого примера коллиматора согласно настоящему изобретению;
на фиг. 11В схематически показаны части, представленные на фиг. 11А, в рабочей конфигурации;
на фиг. 11С схематически показан вид в поперечном разрезе конструкции, представленной на фиг. 11В;
на фиг. 11D схематически показаны части коллиматора, пример которого представлен на фиг. 11В;
на фиг. 12А схематически показаны основные модули другого примера коллиматора согласно настоящему изобретению;
на фиг. 12В схематически показаны модули, представленные на фиг. 12А, в рабочей конфигурации;
на фиг. 13А схематически показан другой пример коллиматора согласно настоящему изобретению;
на фиг. 13В схематически показан другой пример коллиматора согласно настоящему изобретению;
на фиг. 14А схематически показаны основные части другого примера коллиматора согласно настоящему изобретению;
на фиг. 14В схематически показаны части, представленные на фиг. 14А, в рабочей конфигурации;
на фиг. 15 схематически показаны еще 4 примера другого коллиматора согласно настоящему изобретению и качественный профиль облучения, создаваемого коллиматором в зависимости от расстояния от центра вращения;
на фиг. 16 схематически показаны еще 4 примера другого коллиматора согласно настоящему изобретению;
на фиг. 17А схематически показан пример ОИ, в целом не расположенной вокруг центра вращения;
на фиг. 17В схематически показан пример изменения профиля скорости вращения коллиматора для повышения качества изображения ОИ, представленной на фиг. 17А;
на фиг. 18 схематически показан пример невращающегося коллиматора и его воздействие на изображение, отображаемое на мониторе;
на фиг. 19 показан пример ОИ, представленной на фиг. 17А, и коллиматор, который можно смещать, чтобы подвести центр вращения к центру ОИ;
на фиг. 20А показан тот же пример коллиматора, который представлен на фиг. 5, для визуального сравнения с коллиматором, представленным на фиг. 20В;
на фиг. 20В показан тот же пример коллиматора, который представлен на фиг. 5, с большим диаметром и более длинным секторным отверстием, применяемыми, чтобы избежать затемнения изображения при смещении коллиматора;
на фиг. 21А представлен типичный фантом в виде ступенчатого оптического клина для использования с рентгеновским излучением;
на фиг. 21В показано различное поглощение в ОИ и фоновых областях, обусловленное фильтром фона и изменением в спектре рентгеновского излучения;
на фиг. 21С показан пример функции коррекции тона, созданной для коррекции тона фонового изображения в соответствии с изображением ОИ;
на фиг. 21D показан пример функции коррекции тона, отрегулированной для удвоенного рентгеновского облучения в отличие от рентгеновского облучения на этапе вычислений;
на фиг. 21Е показан вид в увеличенном масштабе функции, представленной на фиг. 21D, в диапазоне использования;
на фиг. 22А изображены местоположение ОИ и фон для вычисления функции коррекции тона;
на фиг. 22В изображены другое местоположение ОИ и фон для вычисления функции коррекции тона;
на фиг. 23А изображен ход двух рентгеновских лучей через коллиматор, представленный на фиг. 18, в одном положении коллиматора;
на фиг. 23В изображен ход двух рентгеновских лучей через коллиматор, представленный на фиг. 18, во втором положении коллиматора;
на фиг. 24А изображен ход двух рентгеновских лучей через коллиматор с симметричным краем апертуры в одном положении коллиматора;
на фиг. 24В изображен ход двух рентгеновских лучей через коллиматор с симметричным краем апертуры во втором положении коллиматора;
на фиг. 25 изображен видоизмененный пример коллиматора, представленного на фиг. 18;
на фиг. 26 представлено упрощенное схематическое изображение примера расположения клинического оборудования и системы формирования рентгеновских изображений в многокадровом режиме, к которой добавлен датчик отслеживания движения глаза;
на фиг. 27 представлена блок-схема, относящаяся к фиг. 1А и описывающая базовый процесс формирования рентгеновских изображений в многокадровом режиме с использованием датчика отслеживания движения глаза;
на фиг. 28А представлена блок-схема, описывающая способ отображения полных данных одного ЦО (цикла облучения) с использованием нескольких кадров, где нормализация по каждому кадру выполняется отдельно;
на фиг. 28В представлена блок-схема, описывающая способ отображения полных данных одного ЦО с использованием нескольких кадров, где нормализация выполняется после суммирования кадров;
на фиг. 28С представлена блок-схема, описывающая способ отображения полных данных одного ЦО с использованием нескольких кадров, где экран обновляется после каждого кадра;
на фиг. 29 представлена блок-схема, относящаяся к фиг. 8 и описывающая процесс считывания значений пикселей датчика;
на фиг. 30 представлена блок-схема, относящаяся к фиг. 17В и описывающая изменения профиля скорости вращения коллиматора для охвата ОИ, не находящейся в центре отображения;
на фиг. 31 представлена блок-схема, относящаяся к фиг. 18D и описывающая регулировки, необходимые для достижения однородного отношения сигнал/шум по всей переменной ширине кольцевой зоны коллиматора;
на фиг. 32 представлена блок-схема, описывающая способ постепенного смещения отображения для области изображения, раньше входившего в ОИ, которая была перемещена в фоновую область;
на фиг. 33А представлена блок-схема, относящаяся к фиг. 21А, 21В, 21С и описывающая процесс генерации функции коррекции тона с использованием фантома с переменным поглощением (ФПП);
на фиг. 33В представлена блок-схема, относящаяся к фиг. 22А, 22В и описывающая процесс генерации функции коррекции тона с использованием тела пациента.
Подробное раскрытие изобретения
Обратимся теперь к фиг. 1А, представляющем типовое расположение клинического оборудования для формирования рентгеновских изображений в многокадровом режиме.
Рентгеновская трубка 100 генерирует рентгеновское излучение 102, направленное вверх, охватывая относительно большой телесный угол, к коллиматору 104. Коллиматор 104 блокирует часть излучения, позволяя меньшему телесному углу излучения продолжаться в верхнем направлении, проходить через кушетку 108, как правило, изготовленную из материала, относительно прозрачного для рентгеновского излучения, и через тело пациента 110, лежащего на кушетке 108. Часть излучения поглощается и рассеивается телом пациента, а оставшееся излучение поступает во входную зону 112 (как правило, круглую) усилителя изображения 114. Входная зона усилителя изображения обычно имеет диаметр порядка 300 мм, но может иметь и другой размер в зависимости от модели и технологии. Изображение, генерируемое усилителем изображения 114, фиксируется видеокамерой 116, обрабатывается процессором 117 изображений, а затем отображается на мониторе 118 в виде изображения 120.
Хотя изобретение описано, главным образом, со ссылкой на комбинацию усилителя 114 изображения и камеры 116, следует принимать во внимание, что оба этих элемента можно заменить цифровым рентгенографическим датчиком, использующим любую технологию, например, плоскими панелями на основе ПЗС, КМОП или других технологий, такими как плоскопанельный детектор из аморфного кремния и сцинтилляторов, расположенный в плоскости 112. Одним из примеров такой панели является CXDI-50RF, выпускаемая компанией Canon U.S.A., Inc., Лейк Саксесс, штат Нью-Йорк. Термин «детектор» будет использоваться, охватывая любые из этих технологий, в том числе сочетание любого усилителя изображения с любой видеокамерой, и включая любой тип плоскопанельного датчика или любого другого устройства, преобразующего рентгеновское излучение в электронный сигнал.
Термины «зона» и «область» в разделе «Подробное раскрытие изобретения» применяются альтернативно, означают одно и то же и используются в качестве синонимов.
Термин «источник рентгеновского излучения» используется, чтобы обеспечить расширительную интерпретацию для устройств, содержащих точечный источник рентгеновского излучения, необязательно имеющий форму трубки. Хотя термин «рентгеновская трубка» используется в примерах настоящего изобретения в соответствии со стандартной терминологии, принятой в данной области техники, в настоящей заявке предполагается, что примеры изобретения не ограничиваются узкой интерпретацией рентгеновской трубки, и что в этих примерах может использоваться любой источник рентгеновского излучения (например, даже радиоактивный материал с возможностью функционировать в качестве точечного источника).
Оператор 122 стоит возле пациента, чтобы выполнять медицинскую процедуру, наблюдая за изображением 120.
У оператора имеется ножная педаль 124. При нажатии на педаль непрерывное рентгеновское излучение (или относительно высокочастотное импульсное рентгеновское излучение, как объясняется ниже) испускается для получения киноизображения 120. Интенсивность рентгеновского излучения, как правило, оптимизируется с целью выбора компромиссного соотношения между низкой интенсивностью, требующейся для уменьшения воздействия на пациента и оператора, и высокой интенсивностью, требующейся для обеспечения высококачественного изображения 120 (с высоким отношением сигнал/шум). При низкой интенсивности рентгеновского излучения и, вследствие этого, низкой дозе облучения входной зоны усилителя изображения отношение сигнал/шум у изображения 120 может быть таким низким, что изображение 120 становится бесполезным.
Система 126 координат представляет собой эталонную декартову систему координат с осью Y, направленной перпендикулярно плоскости страницы, при этом плоскость X-Y параллельна плоскости коллиматора 104 и входной плоскости 112 усилителя изображения.
Целью настоящего изобретения является обеспечение высокой дозы облучения во входной зоне усилителя изображения в пределах требующейся ОИ, что позволит получить изображение с высоким отношением сигнал/шум, в то же время уменьшая степень облучения других участков зоны усилителя изображения за счет более низкого качества изображения (более низкого отношения сигнал/шум). При таком решении оператор может видеть четкое изображение в ОИ и получать достаточно хорошее изображение для общей ориентации в остальной части области изображения. Целью настоящего изобретения является получение более сложной карты сегментов изображения, в которой каждый сегмент обусловлен разным уровнем рентгеновского излучения, требующимся для конкретного применения. Кроме того, целью настоящего изобретения является предложение различных способов считывания данных с датчика изображения.
В контексте примеров, представленных в разделе «Подробное раскрытие изобретения», при сравнении отношения сигнал/шум в одной зоне с отношением сигнал/шум в другой зоне отношения сигнал/шум сравниваются для пикселей, относящихся к объекту (такому как тело пациента или руки или инструменты оператора) с одинаковым коэффициентом пропускания. Например, когда зона А описана в качестве имеющей более низкое отношение сигнал/шум, чем зона В, предполагается, что пропускание объектом рентгеновского излучения к обеим зонам равномерно по всей зоне и имеет одинаковую величину. Например, в центре зоны А только 1/2 излучения, поступающего на объект, проходит через него к усилителю изображения, при этом отношение сигнал/шум в зоне В сравнимо с зоной А, поскольку в зоне В также только 1/2 излучения, поступающего на объект, проходит через него к усилителю изображения. S (сигнал) зоны А представляет собой среднее значение сигнала, считанного с зоны А (среднее по времени или по площади, если она содержит статистически достаточное количество пикселей). S (сигнал) зоны В представляет собой среднее значение сигнала, считанного с зоны В (среднее по времени или по площади, если она содержит статистически достаточное количество пикселей). Чтобы упростить изложение, рассеянное излучение при описании осуществления изобретения не рассматривается. Воздействие рассеянного излучения и средства для его уменьшения хорошо известны специалистам.
В приведенных ниже примерах предполагается, что статистика шумов имеет нормальное (гауссово) распределение, что удовлетворяет большинству практических аспектов реализации изобретения и позволяет достаточно четко представить примеры в описании осуществления изобретения. Это не является ограничением настоящего изобретения и, если желательно, математические соотношения, представленные в связи со статистикой Гаусса, можно заменить математическими соотношениями статистики Пуассона (или другой статистики), не уменьшая объем настоящего изобретения. Значения шума, связанные с каждый сигналом, представлены среднеквадратичным отклонением статистики Пуассона для данного сигнала, известным специалистам как пуассоновский шум.
Кроме того, доза на пиксель ДНП в рамках всего описания осуществления изобретения рассматривается в одинаковом смысле, т.е. когда ДНП пикселя А сравнивают с ДНП пикселя В, предполагается, что пропускание объекта для обоих пикселей одинаково.
Более детальный пример расположения клинического оборудования для формирования рентгеновских изображений в многокадровом режиме согласно настоящему изобретению представлен на фиг. 1В и фиг. 27. Оператор 122 нажимает ножную педаль 124 для активации рентгеновского излучения (шаг 2724). Датчик 128 отслеживания движения глаза (такой как EyeLink 1000, выпускаемый компанией SR Research Ltd., Каната, провинция Онтарио, Канада) или альтернативное устройство ввода обеспечивает индикацию, когда оператор 122 смотрит на изображение (шаг 2728). Данная информация, как правило, предоставляется применительно к монитору 118. Эта информация, «точка взгляда (наблюдения)», может предоставляться, например, в виде координат (X, Z), в плоскости 118 монитора, с использованием системы 126 координат. Следует принимать во внимание, что в этом примере плоскость монитора 118 и, таким образом, также изображение 120 параллельны плоскости (X, Z) системы 126 координат. Могут применяться и другие системы координат, включая системы координат, связанные с монитором 118 и вращающиеся вместе с монитором 118 при его повороте относительно системы 126 координат.
Данные с устройства 128 ввода поступают на контроллер 127, как правило, представляющем собой компьютер, например, любой персональный компьютер (ПК).
Если контроллер 127 определяет, что взгляд оператора на зафиксирован на изображении 120, рентгеновская трубка 100 не активируется (шаг 2700). В противном случае рентгеновская трубка 100 активируется на шаге 2710 и рентгеновское излучение испускается в направлении коллиматора 104 (и/или 150/150А).
Блок 150 на фиг. 1В представляет коллиматор согласно настоящему изобретению, например, коллиматор, представленный на фиг. 5, фиг. 10А - фиг. 10С, фиг. 11А - фиг. 11D, фиг. 12А - 12В, фиг. 13А - фиг. 13В, фиг. 14А - 14В, фиг. 15А - 15D, фиг. 16А - 16D, фиг. 18А - 18С, фиг. 20А - 20В, фиг. 24А - 24В и фиг. 25.
Блок 150 может располагаться под коллиматором 104, над коллиматором 104, как показано позиционным обозначением 150А, или вместо коллиматора 104 (не показано на фиг. 1В). Управление коллиматорами, представленными блоками 150 и 150А, осуществляет контроллер 127. Рентгеновским излучением также управляет контроллер 127, как правило, с помощью контроллера 130 рентгеновского излучения. В одном из примеров рентгеновское излучение может быть остановлено, даже если оператор 122 нажимает на ножную педаль 124, когда точка взгляда оператора не находится в пределах области изображения 120. Коллиматор частично блокирует излучение в зависимости от определенной точки взгляда оператора (шаг 2720). Часть рентгеновских лучей поглощается телом пациента 110 (шаг 2730), а оставшееся излучение поступает на усилитель 114 изображения (шаг 2740). На шаге 2750 изображение усиливается и фиксируется камерой 116, на шаге 2760 зафиксированное изображение передается на процессор 117 изображений, а на шаге 2770 обработанное изображение отображается на мониторе 120.
Процессор 117 изображений может принимать много различных форм и включаться в настоящее изобретение различными способами. В примере, представленном на фиг. 1В, процессор 117 изображений содержит два основных подблока: подблок 117А обеспечивает основную коррекцию изображения, например, в случае неоднородности пикселей (темновая компенсация, чувствительность, восстановление битых пикселей и т.д.), подблок 117С обеспечивает обработку в целях улучшения качества изображения (такую как уменьшение шума, применение метода нечеткой маски, коррекцию градаций яркости и т.д.). В традиционных системах изображение с подблока 117А передается для дальнейшей обработки в подблок 117С. Работа каждого из подблоков процессора 117 изображений может поддерживаться специализированной аппаратурой, однако они могут также представлять собой логические подблоки, поддерживаемые любой аппаратурой.
В примере, представленном на фиг. 1В, изображение с камеры 116 корректируется подблоком 117А обработки изображений, а затем передается контроллеру 127. Контроллер 127 обрабатывает изображение в соответствии с использованием любых коллиматоров, представляемых блоком 150, и возвращает обработанное изображение подблоку 117С для улучшения качества изображения.
Следует принимать во внимание, что обработка изображения контроллером 127 необязательно должна происходить в контроллере 127 и может выполняться третьим подблоком 117В (не показанным на фиг. 1В), расположенным между 117А и 117С. Подблок 117 В может также представлять собой лишь логическое устройство, реализуемое в процессоре 117 изображений.
Следует принимать во внимание, что контроллер 130 рентгеновского излучения представлен здесь как контроллер системы в широком смысле. В связи с этим он может также обмениваться данными с процессором 117 изображений для определения его рабочих параметров и приема информации, как показано линией 132 связи. Он может управлять усилителем 114 изображений, например, регулируя параметры масштабирования (линия связи не показана), управлять параметрами камерами 116 (линия связи не показана), управлять положением рамы С-типа рентгеновского устройства и кушетки (линия связи не показана) и регулировать рабочие параметры рентгеновской трубки 100 и коллиматора 104 (линия связи не показана).
Для оператора 122 и других сотрудников может быть предусмотрен пользовательский интерфейс для ввода запросов или любых других требований к контроллеру 130 рентгеновского излучения (не показан).
Физически часть или все из таких устройств, как процессор 117 изображений, контроллер 127 и генератор рентгеновского излучения (электрический блок, приводящий в действие рентгеновскую трубку 100), могут входит в состав контроллера 130 рентгеновского излучения. Контроллер 130 рентгеновского излучения может содержать один или несколько компьютеров и подходящее программное обеспечение для поддержания требующихся функциональных возможностей. Примером такой системы с контроллером рентгеновского излучения является рентгеновское устройство ОЕС 9900 Elite с рамой С-типа, выпускаемое компанией GE ОЕС Medical Systems, Inc., Солт-Лейк-Сити, штат Юта, США. Следует принимать во внимание, что данная система не идентична системе, показанной на фиг. 1В, и приведена лишь в качестве общего примера. Часть этих элементов показана на фиг. 26.
Обратимся теперь к фиг. 2, на котором показан пример изображения 120, отображаемого на мониторе 118. В этом примере пунктирная окружность 204 показывает границу между сегментом 200 изображения и сегментом 202 изображения, при этом оба сегмента образуют полное изображение 120. В этом примере требуется получить хорошее качество изображения в сегменте 200, предполагающее более высокую ДНП рентгеновского излучения для сегмента 200, при этом приемлемым является более низкое качество изображения в сегменте 202, предполагающее более низкую ДНП для сегмента 202.
Следует принимать во внимание, что два сегмента 200 и 202 приведены здесь только в качестве примера осуществления настоящего изобретения, не ограничиваемого этим примером, и что изображение 120 можно разделить на любой набор сегментов, управляя формой апертур в коллиматорах и режимом перемещения коллиматоров. Такие примеры будут приведены ниже.
Следует принимать во внимание, что ДНП следует интерпретировать в качестве дозы рентгеновского излучения, доставляемой к сегменту, представляющему один пиксель изображения 120, для генерации считываемого значения пикселя с целью формирования изображения 120 (исключая поглощение телом пациента и другими элементами, не являющимися частью системы, такими как руки и инструменты оператора).
Обратимся теперь к фиг. 3. Типичный коллиматор 104 с круглой апертурой 304 введен в траекторию рентгеновского излучения так, чтобы только рентгеновские лучи 106, проецируемые из фокальной точки 306 рентгеновской трубки 100 и проходящие через апертуру 304, поступали на круглую входную поверхность 112 усилителя изображений 114, тогда как другие рентгеновские лучи 102 блокируются коллиматором. При такой схеме вся входная зона 112 усилителя изображений подвергается воздействию практически одной и той же ДНП. Такая схема не обеспечивает функцию одной ДНП для сегмента 300, соответствующего сегменту 200 на фиг. 2, и другой ДНП для сегмента 302, соответствующего сегменту 202 на фиг. 2. Диаметр входной зоны 112 равен В, как показано на фиг. 3.
D1 представляет собой расстояние от фокальной точки 306 рентгеновского пучка до апертуры 104. D2 представляет собой расстояние от фокальной точки 306 рентгеновского пучка до входной поверхности 112 усилителя изображений.
Обратимся теперь к фиг. 4, определяющему сегменты текущего примера входной поверхности 112 усилителя изображений в обоснование примера настоящего изобретения. В этом примере сегмент 300 представляет собой круговую зону радиусом R1, расположенную в центре круговой входной зоны 112 усилителя изображений. Сегмент 302 имеет кольцевую форму с внутренним радиусом R1 и внешним радиусом R2. R2, как правило, также представляет собой радиус входной зоны усилителя изображений.
Обратимся теперь к фиг. 5, представляющему один вариант осуществления коллиматора, предназначенного для обеспечения одной ДНП для сегмента 300 и другой ДНП для сегмента 302.
Коллиматор 500 выполняют преимущественно в виде круглой пластины из материала, поглощающего рентгеновское излучение (такого как свинец, толщиной, как правило, 1-4 мм), радиусом больше, чем r2. Апертура 502 коллиматора 500 выполнена в виде круглого выреза 504 радиусом r1 в центре коллиматора и секторного выреза 506, имеющего радиус r2 и угол 508. Следует принимать во внимание, что термин «секторный» используется, чтобы указывать на сектор круговой зоны или сектор кольцевой зоны, в зависимости от контекста.
В этом примере r1 и r2 апертуры 502 рассчитаны на то, чтобы обеспечить R1 и R2, показанные на фиг. 4. Когда коллиматор 500 находится в месте расположения коллиматора 104, показанного на фиг. 4, r1 и r2 можно вычислить с помощью следующих уравнений:
r1=R1/(D2/D1),
r2=R2/(D2/D1).
В этом примере угловой раствор 508 составляет 36 градусов, 1/10 окружности. Коллиматор 500 может вращаться вокруг своего центра, как показано стрелкой 512. Груз 510 можно добавлять для балансировки коллиматора 500 и обеспечения совпадения координат центра тяжести в плоскости коллиматора с центром вращения, тем самым, устраняя вибрации системы, которые могут быть вызваны несбалансированным коллиматором. После выполнения одного поворота на 360 градусов ДНП для сегмента 302 составляет 1/10 ДНП сегмента 300.
Следует принимать во внимание, что угол 508 можно рассчитать для получения любых требующихся соотношений ДНП. Например, если угол 508 рассчитан на 18 градусов, после одного полного поворота апертуры 500 ДНП для сегмента 302 составит 1/20 ДНП сегмента 300. Текущий пример будет рассмотрен со ссылкой на угол 508, составляющий 36 градусов.
После выполнения одного поворота коллиматора 500 камера 116 фиксирует один кадр данных, интегрируемых датчиком (матрицей) за время одного полного поворота коллиматора 500, при этом кадр состоит из значений, считанных с набора пикселей матрицы камеры. Теперь это будет описано подробнее с использованием в качестве примера камеры на основе матрицы ПЗС (на приборе с зарядовой связью), такой как ПЗС-камера ТН8730, выпускаемая компанией THALES ELECTRON DEVICES, Велизи, Франция.
В данном примере синхронизация камеры 116 с вращением коллиматора 500 выполняется с помощью язычка 514, выполненного на коллиматоре 500 и проходящего мимо фотодатчика 516, такого как EE-SX3070, выпускаемый компанией OMRON Management Center of America, Inc., Шаумбург, штат Иллинойс, США.
Когда сигнал прерывания, вызываемый язычком 514, получают от фотодатчика 516, данные со строк матрицы камеры 116 передаются на соответствующие сдвиговые регистры, и начинается новый цикл интеграции пикселей. Данные предыдущего цикла интеграции считываются с камеры. Когда язычок 514 снова перекрывает фотодатчик 516, накопленные сигналы снова передаются на сдвиговые регистры матрицы камеры 116 для считывания в качестве следующего кадра.
С помощью этого способа за каждый полный оборот коллиматора формируется один кадр. Для каждого кадра ДНП в сегменте 202 изображения 120 составляет 1/10 ДНП в сегменте 200 изображения 120.
Для уточнения рассмотренного выше варианта обратимся к фиг. 6, на котором показана карта облучения (экспозиции) входной зоны 112 усилителя изображений в кратковременном текущем положении вращающегося коллиматора 500. В этом положении круговая зона 600 и секторная зона 602 подвергаются воздействию излучения, в то время как дополнительный сектор 604 не подвергается воздействию излучения, блокируемого коллиматором 500. При вращении коллиматора 500 секторные зоны 602 и 604 вращаются вместе с ним, при этом круговая зона 600 остается неизменной. В течение одного цикла вращения коллиматора 500 с постоянной скоростью каждый пиксель за пределами зоны 600 подвергается воздействию рентгеновского излучения в течение 1/10 времени облучения пикселя в зоне 600 и, таким образом, получает ДНП, составляющую 1/10 дозы на пиксель в зоне 600.
На фиг. 7 показано эквивалентное оптическое изображение, проецируемое на матрицу 710 камеры, где зона 700 на фиг. 7 эквивалентна зоне 600 на фиг. 6, а зона 702 на фиг. 7 эквивалентна зоне 602 на фиг. 6. Выходное изображение усилителя изображений в проекции на матрицу 710 обозначено позиционным указателем 712. Зона 714 представляет собой типичную зону матрицы, расположенную за пределами диапазона выходного изображения усилителя изображений.
Для каждого кадра, в дополнение к типичной коррекции аддитивной и мультипликативной погрешности для компенсации характеристик линейного отклика на пиксель, при формировании изображения 120 потребуется выполнить умножение на 10 сигнала от пикселей сегмента 202, чтобы сегмент 202 выглядел аналогично сегменту 200 с точки зрения яркости и контрастности. Способ, раскрытый здесь применительно к конкретному примеру, будет называться «нормализацией» пикселей. Схема нормализации выполнена в соответствии со схемой рентгеновского облучения (т.е. формой, скоростью и положением коллиматора).
Для создания рентгенофильма с частотой 10 кадров в секунду (к/с) коллиматор 500 необходимо вращать со скоростью 10 оборотов в секунду (об/с). Для создания рентгенофильма с частотой 16 к/с коллиматор 500 необходимо вращать со скоростью 16 об/с.
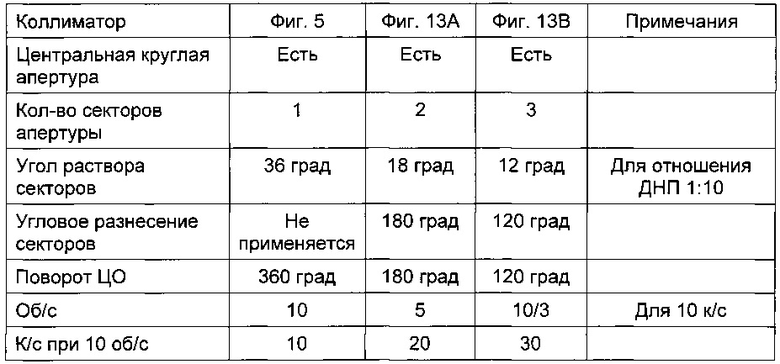
При каждом таком повороте на 360 градусов выполняется полное экспонирование (облучение) входной зоны 112. Поэтому цикл облучения (ЦО) определяется как наименьшая величина поворота коллиматора 500, необходимая для обеспечения минимального полного расчетного облучения входной зоны 112. В примере коллиматора 500, приведенном на фиг. 5, ЦО требует поворота на 360 градусов. При других конструкциях коллиматоров, например, в варианте, показанном на фиг. 13А, ЦО требует поворота на 180 градусов, а в варианте, показанном, на фиг. 13В, ЦО требует поворота на 120 градусов.
Следует принимать во внимание, что примеры коллиматоров, рентгеновские проекции на входную зону 112 усилителя изображений, изображения, проецируемые на матрицу камеры (или на плоскопанельный датчик), и изображения, отображаемые на мониторе 118, описаны в общих чертах, без учета возможных геометрических проблем, таких как переворачивание изображения вследствие формирования изображения объективом, которое может быть различным, если в схеме используется также зеркало, или иное направление вращения, которое принимается в качестве направления по часовой стрелке во всем тексте данного описания, однако может отличаться в зависимости от конкретной конструкции и ориентации наблюдателя. Следует принимать во внимание, что специалисту в данной области техники понятны эти возможные варианты, поэтому он в состоянии правильно интерпретировать любую конкретную конструкцию системы.
Следует принимать во внимание, что схема считывания кадров с камеры, описанная выше со ссылкой на коллиматор 500, может быть выполнена по-разному.
1. Считывание кадра необязательно должно происходить в момент, когда язычок 514 перекрывает фотодатчик 516. Считывание может быть выполнено в любой фазе поворота коллиматора 500 при условии, что оно будет происходить в одной и той же фазе для каждого ЦО.
2. Считывание больше одного кадра в течение одного ЦО. Вместе с тем, желательно, чтобы для каждого ЦО считывалось целое число кадров. При этом считываемые кадры содержат полные данные одного ЦО, что упрощает формирование одного отображаемого кадра, который может быть представлен на мониторе 118 несколькими способами:
a. Обратимся к фиг. 28А. На шаге 2800 начинается новый ЦО. На шаге 2805 пиксели из текущего кадра нормализуют и добавляют к сумме пикселей (шаг 2810). На шаге 2815 рассматривается следующий кадр. Если достигнут конец ЦО, отображаемое изображение регенерируется (шаг 2825), и процесс возвращается к началу нового ЦО. В ходе этого процесса происходит суммирование значений пикселей всех кадров одного ЦО с целью генерации изображения одного полного цикла облучения. Затем суммируются значения пикселей всех кадров следующего ЦО с целью генерации изображения следующего полного цикла облучения. При этом картинка на мониторе заменяется временно-последовательным изображением каждый раз по завершении ЦО. Нормализация значений пикселей может выполняться отдельно для каждого кадра или только однократно для суммы кадров, как показано на фиг. 28В, или для любой другой комбинации кадров.
b. Обратимся к фиг. 28С. Чтобы рассмотреть пример применения данного способа, предположим, что камера обеспечивает 8 кадров в течение одного ЦО. На шаге 2830 начинается новый ЦО. В этом примере все 8 кадров, пронумерованные цифрами 1-8, сохраняют в памяти кадров (шаги 2835-2845, при этом первый отображаемый кадр формируется из этих кадров, как описано выше (суммирование кадров на шаге 2850 и нормализация значений пикселей на шаге 2855). Затем итоговое изображение отображается на мониторе 118. При получении кадра 9 (после 1/8 ЦО) кадр 1 заменяется кадром 9 в памяти кадров (шаг 2870), и кадры 9, 2, 3, 4, 5, 6, 7, 8 обрабатывают (суммирование, нормализация) для формирования второго отображаемого кадра, который может теперь быть отображен на мониторе 118 после 1/8 ЦО. После другой 1/8 ЦО получают следующий кадр (кадр 10) на шаге 2875 и сохраняют его в положении кадра 2. Кадры 9, 10, 3, 4, 5, 6, 7, 8 обрабатывают теперь для формирования третьего отображаемого кадра. Таким образом, используя память кадров, управляемую по методу FIFO («первым пришел - первым вышел»), и формируя отображаемые кадры при получении от матрицы (датчика) каждого нового кадра, отображают для пользователя последовательность киноизображений на мониторе 118.
c. В другом варианте осуществления настоящего изобретения суммирование пикселей кадров выполняется только для пикселей, повергшихся воздействию рентгеновского излучения в соответствии с критериями формы коллиматора и его перемещения в течение времени интегрирования полученного кадра. В приведенном выше примере b это составило бы 1/8 времени ЦО. Пикселями, суммируемыми для создания изображения, являются (1) пиксели из зоны 700 и (2) пиксели в секторном угле, составляющем около 2 × (угловой раствор 508 сектора 506 коллиматора). Причина умножения на 2 состоит в том, что в течение 1/8 времени интегрирования коллиматор поворачивается на 1/8 ЦО. Для компенсации ограничений точности может потребоваться секторный угол, несколько больший, чем 2⋅(угол 508). Этот способ суммирования значительно уменьшает количество пикселей, используемых в процессе суммирования и, тем самым, сокращает время вычислений и потребность в вычислительных ресурсах.
d. В другом варианте осуществления настоящего изобретения обработка пикселей ограничена пикселями, указанными выше в параграфе с. Этот способ обработки значительно уменьшает количество пикселей, используемых при обработке, и, тем самым, сокращает время вычислений и потребность в вычислительных ресурсах.
e. В другом варианте осуществления настоящего изобретения хранение пикселей ограничено пикселями, указанными выше в параграфе с. Этот способ хранения значительно уменьшает количество пикселей, используемых при хранении, и, тем самым, сокращает потребность в памяти для хранения.
f. В другом варианте осуществления настоящего изобретения любые из способов, раскрытых в этом разделе (а - в качестве общей концепции, b - в качестве конкретного примера а, с, d и е), могут объединяться в варианте реализации, использующем любую комбинацию этих способов или несколько из них.
3. Считывание одного кадра в течение более чем одного ЦО. В еще одном варианте осуществления коллиматором можно управлять для обеспечения целого количества ЦО на один кадр, полученный от датчика. Например, после 2 ЦО, выполненных коллиматором, с датчика считывается один кадр. После нормализации значений пикселей этого кадра он может быть отображен на мониторе 118.
Следует принимать во внимание, что во многих конструкциях частота кадров, получаемых от датчика, обусловлена самим датчиком и связанной с ним электроникой и программно-аппаратным обеспечением. В подобных случаях скорость вращения коллиматора 500 можно регулировать в соответствии с характеристиками датчика таким образом, чтобы время одного ЦО было равно времени приема целого числа кадров от датчика (одного или нескольких кадров). Можно также задавать скорость вращения коллиматора таким образом, чтобы в течение временного цикла, предназначенного для получения одного кадра от датчика, выполнялось целое количество ЦО.
Приведенное выше описание считывания кадров в особенности соответствует датчикам типа ПЗС, таким как ПЗС-камеры, монтируемые на усилителе изображений, или плоскопанельные датчики, используемые вместо усилителей изображений и камер и расположенные, как правило, в плоскости 112, как показано на фиг. 3. Особенностью устройств ПЗС является одновременная фиксация значений полного кадра, т.е. всех пикселей датчика. За этим следует последовательная передача аналоговых значений на аналого-цифровой преобразователь (АЦП). Другие датчики, такие как датчики изображения на КМОП-структуре, обычно считывают пиксели кадра один за другим, используя способ, известный под названием «строкового фотозатвора». Способы считывания кадров датчика синхронно с ЦО коллиматора применимы и к таким датчикам, независимо от способов считывания кадров.
Возможность «произвольного доступа» для считывания пикселей датчиков, таких как КМОП-матрицы, обеспечивает еще один вариант осуществления настоящего изобретения. В отличие от ПЗС-матрицы, порядок считывания пикселей с КМОП-матрицы может быть любым, какой потребуется разработчику системы. Эта возможность используется в следующем варианте осуществления. В этом контексте КМОП-матрица представляет любой датчик, поддерживающий считывание пикселей в любом порядке.
Обратимся теперь к фиг. 8 и фиг. 29. Вариант осуществления, показанный на фиг. 8, также описан с использованием примера усилителя изображений и КМОП-камеры, однако следует принимать во внимание, что способ этого варианта осуществления настоящего изобретения применим также к плоскопанельным и другим датчикам, обеспечивающим произвольный доступ для считывания пикселей.
На шаге 2900 выходное изображение усилителя 114 изображений проецируется на зону 712 датчика 710. В соответствии с кратковременным текущим положением вращающегося коллиматора 500, окружность 700 и сектор 702 кратковременно освещаются согласно положению коллиматора 500, а сектор 704 и сектор 714 не освещаются. Секторы 702 и 704 вращаются, как показано стрелкой 706, в соответствии с вращением коллиматора 500.
В контексте данного примера пиксели, расположенные перед радиальной линией, такой как 702А или 800А, представляют собой пиксели, центры которых находятся на радиальной линии, или смещены в направлении по часовой стрелке относительно радиальной линии. Пиксели, расположенные за радиальной линией, представляют собой пиксели, центры которых смещены в направлении против часовой стрелки относительно радиальной линии. Сектор 702, например, содержит пиксели, расположенные за радиальной линией 702А, а также перед радиальной линией 702В. Так, в варианте осуществления, где кадр считывают с датчика один раз за ЦО, пиксели, расположенные рядом с радиальной линией 702А, только что начали освещаться при формировании выходного изображения усилителя изображения, а пиксели, расположенные рядом с радиальной линией 702В, только что закончили освещаться при формировании выходного изображения усилителя изображения. Пиксели в секторе 702 частично освещены в соответствии со своим местоположением между 702А и 702В. В данном примере пиксели в секторе между радиальными линиями 702В и 800В еще не были считаны после освещения при формировании выходного изображения усилителя изображения.
В текущем примере настоящего варианта осуществления мгновенное угловое положение радиальной линии 702А составляет K⋅360 градусов (K раз по 360, где K - целое число, указывающее на номер ЦО с момента начала вращения). Угловой раствор сектора 702 составляет 36 градусов в соответствии с примером коллиматора 500. Поэтому радиальная линия 702 В находится под углом K⋅360-36 градусов. В этом положении коллиматора начинается цикл считывания пикселей сектора 800 (шаг 2910). Радиальная линия 800А задана для обеспечения того, чтобы все пиксели за этой радиальной линией были полностью освещены. Этот угол можно определить, используя радиус R1, показанный на фиг. 5, и размер пикселей, проецируемых на фиг. 5. Для вычисления теоретического минимального углового зазора между 702В и 800А, чтобы обеспечить также полную освещенность пикселей, расположенных рядом с 800А, следует учесть длину дуги радиуса R1, соответствующую хорде, длина которой равна 1/2 диагонали в пикселях. Это определяет минимальный угловой раствор между 702В и 800А, обеспечивающий полную освещенность всех пикселей в секторе 800. В более практическом варианте реализации, предполагая, что зона 712 составляет около 1000 пикселей по вертикали и 1000 пикселей по горизонтали, и что R1 равен примерно 1/4÷1/2 R2 (см. ФИГ. 4), и учитывая допуски такой конструкции и способа реализации, получим, что полезная длина дуги радиуса R1 соответствовала бы, например, диагонали длиной 5 пикселей. Это означает, что угловой раствор между 702В и 800А составляет около 2,5 градусов. Поэтому в момент, показанный на фиг. 8, угловое положение радиальной линии 800А составляет K⋅360-(36+2,5) градусов.
В этом конкретном примере настоящего варианта осуществления угловой раствор сектора 800 также выбран равным 36 градусам. Таким образом, в момент, показанный на фиг. 8, угловое положение радиальной линии 800В составляет K⋅360-(36+2,5+36) градусов.
На фиг. 8 угловой раствор сектора 800 вычерчен, чтобы продемонстрировать меньший угол, чем угловой раствор сектора 702, и подчеркнуть, что углы необязательно должны быть одинаковыми, и что в представленном здесь примере они являются одинаковыми исключительно в контексте конкретного примера осуществления.
После того, как геометрические характеристики сектора 800 определены, пиксели данного сектора считываются с матрицы камеры. В типичной КМОП-матрице после считывания каждого пикселя выполняется сброс этого пикселя (шаг 2920), чтобы пиксель снова мог начать с нуля интегрирование сигнала. В другом варианте осуществления в первой фазе все пиксели сектора 800 считываются, а во второй фазе - сбрасываются. Цикл считывания и сброса сектора 800 необходимо закончить в пределах интервала времени, требующегося для поворота сектора 702 на угловое расстояние, равное угловому раствору сектора 800 (шаг 2950), чтобы система была вовремя готова к считыванию следующего сектора с таким же углом раствора, как у сектора 800, но при повороте по часовой стрелке на величину угла раствора сектора 800 относительно углового положения сектора 800. В данном примере: 36 градусов.
В приведенном выше примере при вращении коллиматора 500 со скоростью 10 об/с раствор сектора 800, равный 36 градусам, предполагает 10 угловых положений (вариантов ориентации) в рамках одного ЦО, при этом угловые положения сдвинуты на 36 градусов относительно друг друга, а циклы считывания и сброса пикселей выполняются с частотой 10 ц/с (циклов в секунду).
Следует принимать во внимание, что данный вариант осуществления может быть реализован в виде различных конкретных конструкций.
Например, угловой раствор сектора 800 может быть рассчитан на 18 градусов, тогда как угловой раствор сектора 702 по-прежнему составляет 36 градусов, а коллиматор 500 вращается со скоростью 10 об/с.
В этом примере сектор 800 принимает 20 угловых положений в рамках одного ЦО, при этом угловые положения сдвинуты на 18 градусов относительно друг друга, а циклы считывания и сброса пикселей выполняются с частотой 20 ц/с (циклов в секунду).
Еще в одном варианте осуществления шум темнового тока, накапливаемый пикселями в секторе 704, расположенными за радиальной линией 800 В и перед радиальной линией 802А, удаляется другим циклом сброса пикселей, расположенных в секторе 802 (за радиальной линией 802А и перед радиальной линией 802В). Этот процесс сброса идеально выполняется в секторе 802, заданном рядом с сектором 702 (перед ним). Сброс всех пикселей сектора 802 необходимо выполнить раньше, чем радиальная линия 702А вращающегося сектора 702 достигнет пикселей сектора 802. В противном случае раствор угла и угловое положение сектора 802 сброса рассчитывают с использованием способов и учетом факторов, аналогичных применяемым для определения сектора 800.
Пиксели, считываемые из сектора 800, должны обрабатываться с целью нормализации (шаг 2930) и могут использоваться для формирования кадров изображения (шаг 2940) способами, аналогичными описанным выше в разделе 2 «Считывание больше одного кадра в течение одного ЦО», где в текущем варианте осуществления считываются, сохраняются и обрабатываются только пиксели сектора, а не весь кадр матрицы (датчика).
В этом варианте осуществления после нормализации пикселей последнего считанного секатора обработанные пиксели можно использовать для непосредственной замены соответствующих пикселей в отображаемом кадре. При этом отображаемый кадр регенерируется в режиме, аналогичном развертке луча радиолокатора, когда каждый раз выполняется регенерация следующего сектора изображения. После регенераций, число которых составляет 360 / (угол раствора сектора считывания), регенерируется весь кадр изображения. Это обеспечивает простую схему регенерации изображений.
Обратим теперь внимание на фиг. 9. В отличие от фиг. 8, где сектор считывания включал в себя полный набор пикселей, расположенных за радиальной линией 800А и перед радиальной линией 800В, в этом варианте осуществления изобретения зона считывания геометрически разделена на две части: круговую зону 700 и сектор 900. Сектор 900 в варианте осуществления, показанном на фиг. 9, содержит пиксели, расположенные за радиальной линией 900А и перед радиальной линией 900В, а также за радиусом R-1 и перед радиусом R-2. В этом примере к пикселям, расположенным перед радиусом, относятся те пиксели, расстояние от которых до центра меньше или равно радиусу R, а к пикселям, расположенным за радиусом R, - те пиксели, расстояние от которых до центра больше R. Пикселями зоны 700 являются все пиксели, расположенные перед R-1.
В данном варианте осуществления пиксели сектора 900 считывают и обрабатывают, используя способы, описанные применительно к варианту осуществления, показанному на фиг. 8. То же самое относится к сектору 802 сброса.
Пиксели зоны 700 обрабатываются по другому.
В одном из примеров реализации данного варианта осуществления пиксели в зоне 700 могут считываться один или несколько раз в течение одного ЦО и обрабатываться, как описано выше для варианта осуществления со считыванием всей КМОП-матрицы, либо зона 700 может считываться один раз более чем за один ЦО, и обрабатываться соответственно, как описано выше для варианта осуществления со считыванием всей КМОП-матрицы.
Следует принимать во внимание, что при каждом способе считывания процесс нормализации пикселей должен выполняться так, чтобы получить отображаемый кадр, в котором значения всех пикселей представляют одинаковую чувствительность к облучению.
Обратим теперь внимание на фиг. 10, где представлен один пример конструкции коллиматора согласно настоящему изобретению в сочетании с системой управления перемещением, предназначенной для обеспечения функции вращения коллиматора 500.
На фиг. 10А показан вид сверху коллиматора и системы вращения согласно настоящему примеру.
На фиг. 10В показан вид снизу коллиматора и системы вращения согласно настоящему примеру.
На фиг. 10С показан вид в поперечном разрезе по линии а-а на фиг. 10А.
На фиг. 10А показан коллиматор 500 и апертура 502 (другие детали опущены для ясности). Шкив 1000 монтируется сверху на коллиматоре 500 соосно с коллиматором. Шкив 1002 монтируется на электродвигателе 1012 (см. электродвигатель на фиг. 10В и фиг. 10С). Ремень 1004 соединяет шкив 1000 со шкивом 1002 для передачи вращения шкива 1002 шкиву 1000 и, тем самым, обеспечения требуемого вращения коллиматора 500. Ремень и система шкивов, обозначенные в этом примере позициями 1000, 1002 и 1004, представляют собой систему с плоскоременной передачей, однако следует принимать во внимание, что может использоваться любая другая система ременной передачи, включая системы с круглыми ремнями, клиновыми ремнями, мультиребристыми ремнями, поликлиновыми ремнями, пленочными ремнями и ремнями синхронизации.
На фиг. 10В показан вид снизу, соответствующий фиг. 10А и изображающий многие компоненты, не представленные раньше. Показана V-образная круговая дорожка 1006, соосная с коллиматором 500 (см. поперечный разрез а-а 1006 на фиг. 10С). Три колесика 1008, 1010 и 1012 соприкасаются с V-образной канавкой дорожки 1006. Оси вращения 3-х колесиков монтируются на кольцеобразной неподвижной детали 1016 (не показана на фиг. 10В), которая крепится к опорной раме рентгеновской трубки. Эта конструкция обеспечивает опору для коллиматора 500 в требуемом положении относительно рентгеновской трубки (например, в положении коллиматора 104 на фиг. 3), в то же время, обеспечивая 3 колесика 1008, 1010 и 1012 с дорожкой 1006 для требуемого вращения коллиматора 500.
Вращение электродвигателя 1014 передается коллиматору 500 с помощью шкива 1002 через ремень 1004 и шкив 1006. Коллиматор 500 вращается, опираясь на дорожку 1006, движущуюся на колесиках 1008, 1010 и 1022.
Следует принимать во внимание, что раскрытый в этом описании механизм вращения является лишь одним из примеров возможной реализации механизма вращения для вращающегося коллиматора. Вместо этого в механизме вращения может использоваться зубчатая передача любого типа, включая прямозубые цилиндрические, косозубые цилиндрические, конические, гипоидные, плоские конические и червячные зубчатые передачи. В качестве элемента 1002 в механизме вращения может использоваться наружный цилиндр с большим коэффициентом трения, приводимый в прямой контакт с ободом коллиматора 500, при этом ремень 1004 и шкив 1000 не требуются. В другом варианте осуществления коллиматор 500 может использоваться вместе с ротором электродвигателя с добавлением статора, расположенного вокруг него.
В описании коллиматора, показанного на фиг. 5, язычок 514 и фотодатчик 516 были представлены в качестве элементов, обеспечивающих отслеживание углового положения коллиматора 500 с целью синхронизации между угловым положением коллиматора и процессом считывания матрицы. Эти элементы были приведены в качестве одного из примеров реализации. Средства отслеживания углового положения в данном варианте осуществления могут быть реализованы также многими другими способами. В примере на фиг. 10 электродвигатель 1002 мог бы иметь присоединенный к нему кодовый датчик положения, например, выпускаемый компанией Maxon Precision Motors, Inc, Фолл-Ривер, штат Массачусетс, США. Простой кодовый датчик положения можно выполнить, например, наклеив черно-белую двоично-кодированную полосу на окружность коллиматора 500 и производя считывание с ленты с помощью оптических датчиков, таких как светоотражающий оптический датчик TCRT5000, выпускаемый компанией Newark, http://www.newark.com.
Коллиматор 500 был описан выше в качестве устройства, имеющего фиксированную апертуру, которую нельзя видоизменить после изготовления коллиматора.
Следует принимать во внимание, что в другом варианте осуществления настоящего изобретения механические конструкции коллиматорных узлов могут быть изготовлены с возможностью встраивания изменяемых коллиматоров. При этом на коллиматорном узле могут устанавливаться различные апертуры в соответствии с требованиями конкретного применения.
В дополнительном примере осуществления настоящего изобретения конструкция коллиматора может предусматривать в коллиматорном узле регулируемую апертуру. Этот вариант показан со ссылкой на фиг. 11.
Коллиматор на фиг. 11 изготовлен из двух совмещаемых коллиматоров, показанных на фиг. 11А. Один из них - коллиматор 1100 с апертурой 1104 и балансировочным грузом 510 для совмещения центра тяжести этого коллиматора с центром его вращения. Второй - коллиматор 1102 с апертурой 1105 и балансировочным грузом 511 для совмещения центра тяжести этого коллиматора с центром его вращения. У обоих коллиматоров геометрия апертуры представляет собой комбинацию центрального кругового отверстия радиусом r1 и секторного отверстия радиусом r2, с углом раствора сектора, составляющим 180 градусов. По существу, коллиматор 1102 имеет такую же общую конструкцию, как коллиматор 1100 и находится в перевернутом положении.
Если поместить коллиматоры 110 и 1102 соосно один поверх другого, как показано на фиг. 11В, получим комбинированную апертуру, такую же, как у коллиматора 500 на фиг. 5. Поворачивая коллиматор 1100 относительно коллиматора 1102, можно увеличивать или уменьшать угол раствора сектора 508. В данном примере угол раствора сектора 508 может быть задан в диапазоне 0÷180 градусов. В этом примере кольцо 1108 удерживает коллиматоры 1100 и 1102 вместе, как показано также на фиг. 11С, представляющем собой поперечный разрез b-b, показанный на фиг. 11В. Обратимся теперь к фиг. 11С (грузы 510 и 511 на чертеже поперечного разреза не показаны). В этом примере кольцо 1108 показано удерживающим вместе коллиматоры 1100 и 1102, позволяя им поворачиваться относительно друг друга, чтобы задавать требуемый угол раствора 508 сектора 506. Пример фиксирующего устройства, удерживающего коллиматоры 1100 и 1102 с требуемой ориентацией относительно друг друга, показан на фиг. 11D. На фиг. 11D кольцо 1108 показано без коллиматоров 1100 и 1102 для ясности. Участок 1110 представляет собой вырез на чертеже, позволяющий показать U-образную деталь 1112 кольца 1108, внутри которого удерживаются коллиматоры 1100 и 1102. Винт 1114, вставляемый в резьбовое отверстие 1116, используется для фиксации коллиматоров 1100 и 1102 в рабочем положении после задания требуемого угла раствора 508. Для изменения угла раствора 508 оператор может ослабить винт 1114, заново отрегулировать ориентацию коллиматоров 1100 и/или 1102 и снова закрепить винт 1114, чтобы задать рабочее положение коллиматоров.
Вариант, показанный на фиг. 11, включающий ручную регулировку угла раствора 508, приведен в качестве одного из примеров реализации настоящего изобретения. Существуют также многие другие варианты. Еще один пример показан со ссылкой на фиг. 12. В этом примере угол раствора 508 может регулироваться компьютером. Механизм, показанный на фиг. 12, преимущественно представляет собой конструкцию, состоящую из двух блоков, аналогичных блоку на фиг. 10 с несколькими внесенными изменениями, включая снятие шкива 1000 и использование обода коллиматора в качестве шкива. Балансировочные грузы 510 и 511 не показаны здесь для ясности чертежа.
На фиг. 12А нижний блок, содержащий коллиматор 500, по существу представляет собой узел, показанный на фиг. 10, со снятым шкивом 1000 и с использованием обода коллиматора 500 в качестве шкива. В верхнем блоке, содержащем коллиматор 1200, используется такой же узел, как и в нижнем, когда нижний узел повернут на 180 градусов относительно оси, вертикальной к плоскости страницы, за исключением того, что электродвигатель 1214 был повернут на 180 градусов в другой плоскости таким образом, что оказался ниже шкива, как и электродвигатель 1014. В данном примере это необязательно, однако в некоторых вариантах конструкции может оказаться полезным, чтобы в пространстве над узлом, показанным на фиг. 12, не было ненужных предметов. На фиг. 12В эти 2 узла показаны сведенными вместе так, что коллиматоры 500 и 1200 находятся рядом друг с другом и соосны. В узле на фиг. 12В каждый из коллиматоров 500 и 1200 можно поворачивать независимо. Угловое положение каждого коллиматора известно благодаря системе кодирования, включая примеры, приведенные выше.
В одном примере использования узла, показанного на фиг. 12В, угол раствора 508 задают, когда коллиматор 500 находится в состоянии покоя, а коллиматор 1200 поворачивается до тех пор, пока не будет достигнут требуемый угол 508. После этого оба коллиматора вращаются с одинаковой скоростью для получения картины рентгеновского облучения, как в описанных выше примерах. Следует принимать во внимание, что для регулирования угла 508 не требуется останавливать какой-либо из коллиматоров. Вместо этого при вращении обоих коллиматоров скорость вращения одного коллиматора относительно другого может изменяться, пока не будет достигнут требуемый угол 508, после чего оба коллиматора продолжат вращение с одинаковой скоростью.
Следует принимать во внимание, что механизм с такими функциональными возможностями, как показано в примере на фиг. 12В, можно использовать для введения нескольких усложненных картин освещения. С помощью таких механизмов угол 508 можно изменять в течение ЦО, формируя несколько картин освещения. Например, угол 508 может увеличиваться в первой половине ЦО и уменьшаться во второй половине ЦО. Это создает картину освещения из 3-х различных вариантов освещения (облучения) (следует понимать, что границы между зонами, облучаемыми через сектор 506, не резкие, и ширина этих границ зависит от угла 508 и скорости изменения этого угла относительно скорости вращения коллиматоров).
Следует также принимать во внимание, что любые из коллиматоров настоящего изобретения могут вращаться со скоростью, изменяемой в пределах ЦО, и влиять, там самым, на геометрию освещения (облучения). Например, коллиматор 500 на фиг. 5 может вращаться с одной скоростью в пределах первых 180 градусов ЦО и в два раза быстрее в пределах других 180 градусов ЦО. В этом примере зона, облучаемая через сектор 506 в течение первой половины ЦО, получает в два раза большую ДНП, чем зона, облучаемая через сектор 506 в течение второй половины ЦО, с постепенным изменением ДНП при переходе через границу между двумя половинами. Центральная зона, облучаемая через круговую апертуру 504, имеет 3-й уровень ДНП. При других профилях скоростей вращения могут формироваться другие геометрии облучения. Например, 3 различные скорости вращения в пределах 3-х различных частей ЦО формируют 4 зоны с различными ДНП.
В приведенных выше примерах представлены коллиматоры с апертурами, имеющими сходные основные формы, состоящие из центрального круглого отверстия в сочетании с отверстием секторной формы. Эти примеры использовались, чтобы представить многие аспекты настоящего изобретения, однако изобретение не ограничивается этими аспектами.
Обратимся теперь к фиг. 13А, иллюстрирующему другой пример апертуры настоящего изобретения. В этом примере апертура коллиматора 1300 сформирована из кругового отверстия 1302, соосного с ободом коллиматора, секторообразного отверстия 1304 и секторообразного отверстия 1306 в направлении, противоположном отверстию 1304 (два сектора разнесены на 180 градусов). Если требуется, например, чтобы кольцевая зона на фиг. 6 (содержащая секторы 602 и 604) подвергалась облучению ДНП, составляющей 1/10 ДНП зоны 600 на фиг. 6, то каждый из секторов 1304 и 1306 можно установить равным 18 градусам, при этом один ЦО будет выполняться всего за 180 градусов поворота коллиматора 1300 по сравнению с 360 градусами, необходимыми для коллиматора на фиг. 5. Также, для получения 10 кадров в секунду (к/с) скорость вращения коллиматора 1300 должна составлять 5 об/с, а не 10 об/с, как в случае коллиматора 500 на фиг. 5. Кроме того, для коллиматора 1300 на фиг. 13А не требуется балансировочный груз, такой как груз 510 на фиг. 5, поскольку он уже сбалансирован благодаря своей геометрии.
Еще один пример коллиматора согласно настоящему изобретению представлен на фиг. 13В. Апертура коллиматора 1310 сформирована из кругового отверстия 1312, соосного с ободом коллиматора, секторообразного отверстия 1314, секторообразного отверстия 1316 и секторообразного отверстия 1318, при этом три сектора разнесены на 120 градусов. Если требуется, например, чтобы кольцевая зона на фиг. 6 (содержащая секторы 602 и 604) подвергалась облучению ДНП, составляющей 1/10 ДНП зоны 600 на фиг. 6, то каждый из секторов 1314, 1316 и 1318 можно установить равным 12 градусам, при один ЦО будет выполняться лишь за 120 градусов поворота коллиматора 1310 по сравнению с 360 градусами, необходимыми для коллиматора на фиг. 5. Также, для получения 10 к/с скорость вращения коллиматора 1300 должна составлять 10/3 об/с, а не 10 об/с, как в случае коллиматора 500 на фиг. 5. Кроме того, для коллиматора 1300 на фиг. 13В не требуется балансировочный груз, такой как груз 510 на фиг. 5, поскольку он уже сбалансирован благодаря своей геометрии.
Следует принимать во внимание, что примеры соотношений и способов вращения коллиматора, показанные на фиг. 13А и фиг. 13В, и считывание значений пикселей с датчика изображений, описанное выше применительно к примеру коллиматора на фиг. 5, полностью совместимы с примерами коллиматоров на фиг. 13А и фиг. 13В при выполнении регулировок, понятных для специалиста в данной области техники. Например, в случае коллиматора, показанного на фиг. 13В, и КМОП-камеры сектор 800 считывания пикселей на фиг. 8 можно дополнить еще 2-я секторами считывания пикселей, каждый из которых соответствует одному из 2 дополнительных секторов апертуры, показанной на фиг. 13В.
Некоторые из этих изменений и их сравнение приведены в следующей таблице, где представлены различия характеристик и способа реализации между 3 различными примерами коллиматоров.
На фиг. 11 и фиг. 12 представлен пример того, как коллиматор, изображенный на фиг. 5, может быть выполнен с регулируемым углом раствора 508 сектора 506.
На фиг. 14 представлен пример того, как коллиматор, изображенный на фиг. 13А, может быть выполнен с возможностью регулирования угла раствора секторов 1304 и 1306.
На фиг. 14А приведен пример 2 коллиматоров 1400 и 1402. Серый фон в форме прямоугольника используется для лучшего визуального представления сплошной зоны и апертурных отверстий коллиматоров и не является частью конструкции. То же самое относится к фиг. 14В. Каждый из коллиматоров имеет апертуру в виде кругового отверстия, соосного с ободом коллиматора, и двух секторных отверстий, при этом каждый сектор имеет угол раствора 90 градусов, а секторы разнесены на 180 градусов. Когда коллиматоры 1400 и 1402 помещены сверху один на другой и соосны, получают комбинированный коллиматор, представленный на фиг. 14В. Размер и форма апертуры у коллиматора на фиг. 14В такие же, как у коллиматора на фиг. 13А. Однако в случае узла в сборе, показанного на фиг. 14В, угол раствора секторов 1404 и 1406 апертуры можно изменить, поворачивая коллиматоры 1400 и 1402 относительно друг друга. Это можно выполнить с помощью любого из способов, описанных выше со ссылкой на фиг. 11 и фиг. 12.
Следует принимать во внимание, что аналогичные конструкции могут обеспечивать изменяемый угол раствора секторов апертуры коллиматора 1310 на фиг. 13В и другие конструкции апертуры.
В представленной выше конструкции апертуры форма апертуры рассчитана на обеспечение двух зон с двумя разными ДНП при постоянной скорости вращения.
На фиг. 15А представлен такой коллиматор, а также качественный профиль облучения с двумя уровнями ДНП для различных расстояний от центра - r.
Для получения любых требуемых профилей облучения могут быть сконструированы и другие апертуры. Несколько примеров показаны на фиг. 15В, ФИГ. 15С и фиг. 15D. Все коллиматоры на фиг. 15 имеют конструкцию апертуры, предназначенную для поворота на 360 градусов за один ЦО.
Характеристики апертур коллиматоров на фиг. 15 могут комбинироваться с характеристиками апертур коллиматоров на фиг. 13. Примеры таких комбинаций показаны на фиг. 16, изображающем 4 коллиматора с 4 различными конструкциями апертуры. На фиг. 16А левая и правая половины апертуры несимметричны, и для одного ЦО требуется поворот на 360 градусов. На фиг. 16В предлагается коллиматор с апертурой, обеспечивающей профиль облучения, аналогичный (но не идентичный) профилю на фиг. 15С, однако один ЦО включает в себя поворот только на 90 градусов. На фиг. 16С предлагается коллиматор с апертурой, обеспечивающей профиль облучения, аналогичный (но не идентичный) профилю на фиг. 15D, однако один ЦО включает в себя поворот только на 360/8=45 градусов. На фиг. 16D предлагается коллиматор с апертурой, обеспечивающей профиль облучения, аналогичный (но не идентичный) профилю на фиг. 15D, однако один ЦО включает в себя поворот только на 180 градусов.
Рассматривая эти примеры, следует принимать во внимание, что настоящее изобретение можно реализовать в виде многих конструкций, и что оно не ограничивается конкретной конструкцией, приведенной выше в качестве примера.
Коррекция пикселей
Как объяснялось выше, пиксели с различными ДНП в соответствии с конструкцией и применением коллиматора нормализуют для получения надлежащего отображаемого кадра (кадра изображения). Схема нормализации выполнена в соответствии со схемой рентгеновского облучения (т.е. формой, скоростью и положением коллиматора). Такая нормализация может быть выполнена на основе теоретических параметров. Например, как показано на фиг. 7 и фиг. 5, при вращении коллиматора 500 с постоянной скоростью пиксели кольцевой зоны, содержащей секторы 702 и 704, принимают 1/10 дозы круговой зоны 700 (в этом примере угол раствора 508 сектора 506 составляет 36 градусов). Для простоты в этом примере предполагается, что один кадр считывается с матрицы (датчика) каждый раз по завершении ЦО (т.е. после выполнения коллиматором 500 поворота на 360 градусов). Предполагается также, что все пиксели матрицы одинаково реагируют на выходное изображение усилителя изображений, и что усилитель изображений обладает равномерной чувствительностью, и рентгеновский пучок, выходящий из рентгеновской трубки, является равномерным. Единственным внутренним (т.е. действующим на системном уровне) источником различий между пикселями является сам коллиматор и способ управления им. В данном примере нормализация, основанная на конструкции системы, представляла бы собой умножение пикселей на один или два коэффициента для компенсации различий в ДНП.
В одном примере нормализации значения пикселей кольцевой зоны, содержащей секторы 702 и 704, могут умножаться на 10. В другом примере нормализации значения пикселей круговой зоны 700 могут умножаться на 1/10. В еще одном примере нормализации значения пикселей кольцевой зоны, содержащей секторы 702 и 704, могут умножаться на 5, а значения пикселей круговой зоны 700 могут умножаться на 1/2.
Следует принимать во внимание, что в описании, объяснениях и примерах настоящего изобретения умножение и деление вполне эквивалентны, и такие выражения, как «умножение на 1/10» вполне эквивалентны таким выражениям, как «разделить на 10», поэтому каждое упоминание умножения на какое-либо значение означает также альтернативное деление на обратное значение, и наоборот. То же самое относится к символам умножения и деления, используемым в уравнениях. Например, А/В представляет также А⋅С, где С=1/В.
Приведенный выше пример относительно прост, поскольку схема нормализации содержит две известные зоны с двумя известными ДНП. Ситуация может стать несколько более сложной при использовании других коллиматоров или другой схемы перемещения коллиматора.
В следующем примере изменение вводится во вращение коллиматора 500. Вместо постоянной скорости вращения используется переменная скорость вращения, как показано в следующей таблице для одного ЦО (в случае коллиматора 500: 360 градусов).
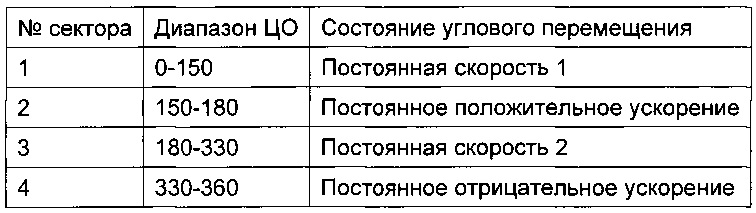
Эта схема вращения вместе с конволюцией пикселей изображения, особенно в секторах, где происходит ускорение, усложняет оценку коэффициентов нормализации.
В примере коллиматоров на фиг. 15С и фиг. 15D многим «пиксельным кольцам» (пикселям, находящимся на определенном расстоянии от центра) требуется подходящий коэффициент нормализации. Допуски на изготовление системы, не включенные в теоретическую оценку коэффициентов нормализации, могут привести к появлению погрешностей, проявляющихся в виде кольцеобразных структур на изображении, отображаемом на мониторе 118.
Следующий способ калибровки обеспечивает калибровку, устраняющую необходимость в теоретической оценке коэффициентов, а также компенсирующую допуски на изготовление.
В этом примере могут использоваться любой коллиматор настоящего изобретения и любая схема вращения, заданная для ЦО.
Система формирования рентгеновских изображений в многокадровом режиме включает в себя все постоянные элементы, относящиеся к процессу формирования изображений (рентгеновскую трубку, требуемый режим работы рентгеновской трубки, т.е. напряжение и ток, возможный рентгеновский фильтр, коллиматор, кушетку пациента, усилитель изображений, камеру), но ни одну из изменяемых частей (тело пациента, руки и инструменты оператора).
В соответствии с этим способом калибровки требуемый коллиматор вращается согласно требуемой схеме. Получают набор необработанных кадров (используя любые способы, примеры которых приведены выше). Необработанный кадр представляет собой кадр, полученный на основе целого числа (одного или нескольких) ЦО со всеми пикселями, находящимися в зоне 712 (фиг. 7), без каких-либо манипуляций над пикселями. Количество полученных необработанных кадров должно быть достаточным для достижения относительно хорошего отношения сигнал/шум в усредненном необработанном кадре, представляющем собой среднее всех полученных необработанных кадров. Усредненный необработанный кадр с отношением сигнал/шум, в 10 раз превышающим соответствующее отношение для необработанного кадра, как правило, оказывается удовлетворительным, причем этот результат может достигаться путем усреднения 100 необработанных кадров. Следует принимать во внимание, что, в зависимости от требуемого качества нормализованного кадра, может использоваться большее или меньшее количество необработанных кадров.
Один усредненный необработанный кадр создается при выключенном, а другой - при включенном рентгеновском излучении.
В данном примере мы предполагаем, что значение яркости для каждого пикселя изменяется в диапазоне от нуля до 255. Мы также приняли решение отображать теоретический свободный от шумов кадр в диапазоне 5÷250 (самый темный свободный от шумов пиксель отображается при значении 5, а самый ярко освещенный свободный от шумов пиксель - при значении 250. Это позволяет учесть статистические характеристики шума, создающего значения пикселей в диапазоне 0÷4 и 251÷255, в отображаемом кадре).
Коррекцию для каждого пикселя i необработанных кадров j, Pij (j - индекс номера кадра в данном примере) вычисляют, используя значения пикселей усредненного необработанного кадра, полученного при включенном рентгеновском излучении, Ai, и значения пикселей усредненного необработанного кадра, полученного при выключенном рентгеновском излучении, Bi, для получения корректированного пикселя Dij в соответствии со следующим:

В случае другого, несколько упрощенного способа, при коррекции можно игнорировать визуальные аспекты шума при уровнях черного и белого и просто корректировать диапазон отображения 0÷255 в соответствии со следующим:

Следует принимать во внимание, что предложенная выше коррекция является линейной и оптимальна для систем с относительно линейным откликом усилителя изображения и камеры.
Для систем с нелинейным откликом могут использоваться более сложные схемы коррекции, например, билинейная коррекция. В этом примере диапазон значений пикселей делится приближенно на 2 диапазона. Ток рентгеновской трубки можно уменьшить, например, до 1/2 ее нормального рабочего режима, чтобы снизить ДНП до 1/2. Следует принимать во внимание, что уменьшенный уровень тока зависит от характера нелинейности, и для оптимальной билинейной коррекции может потребоваться значение, отличное от 1/2 тока рентгеновской трубки. Следует также принимать во внимание, что ДНП можно, кроме того, уменьшить другими способами, например, с помощью алюминиевых пластин, помещенных сразу за коллиматором.
В данном примере, при 1/2 тока рентгеновской трубки, получают другой набор необработанных кадров. Следует принимать во внимание, что отношение сигнал/шум у этих необработанных кадров ниже, чем у необработанных кадров при стандартном токе рентгеновской трубки для конкретного применения. Это можно компенсировать, используя большее количество необработанных кадров, чтобы сформировать усредненный необработанный кадр для 1/2 тока рентгеновской трубки, например, 200 необработанных кадров. Пусть Mi представляет значения пикселей усредненного необработанного кадра для 1/2 тока рентгеновской трубки при включенном излучении.
Вариант коррекции согласно уравнению 2 реализован в этом примере в соответствии со следующим.
Для Pij со значениями, равными или меньшими, чем 127:

Для Pij со значениями, большими чем 127:

Следует принимать во внимание, что может быть задан и другой уровень тока рентгеновской трубки для Mi (например, 1/4 стандартного тока для конкретного применения), при этом уравнения принимают следующую форму.
Для Pij со значениями, равными или меньшими, чем 63:

Для Pij со значениями, большими чем 63:

Следует также принимать во внимание, что, если нелинейность у различных пикселей в пределах рабочего диапазона системы аналогична (т.е. различия нелинейного отклика относительно невелики), поправка на нелинейность в большинстве случаев не требуется. Если для конкретного применения не требуется линейный отклик, и нужно лишь уменьшить воздействие неравномерности отклика пикселей на отображаемый кадр, корректировку нелинейности можно пропустить.
Можно также пропустить корректировку всех пикселей, если получаемая в результате картина шумов не мешает конкретному применению. Корректировка может выполняться при различных уровнях сложности (линейная, билинейная, трилинейная, полиномиальная интерполяция и т.д.) или не выполняться совсем, в зависимости от требований конкретного применения.
Различные ОИ и различные профили скоростей вращения
В приведенных выше примерах были представлены различные профили вращения при различных скоростях вращения. В следующем примере профили вращения регулируемой скорости будут описаны в контексте ОИ на изображении. В приведенных выше примерах коллиматоров центральная круговая зона (такая как 600 на фиг. 6 и 700 на фиг. 7) была представлена в качестве ОИ и принимала, вследствие этого, большую ДНП, чем кольцевая область секторов 702 и 704, которые принимают меньшую ДНП. Это тривиальный случай и, как правило, центральная зона изображения также представляет собой ОИ, где расположена наиболее важная часть изображения. Более высокая ДНП приводит к повышению отношения сигнал/шум и, таким образом, улучшает качество изображения в этой зоне (например, обеспечивает лучшую различимость деталей). Обычно во время, например, процедуры введения катетера кушетку с пациентом перемещают, чтобы удерживать кончик катетера в пределах зоны 700 в ходе этого процесса. И все же, иногда наиболее важная область исследования на изображении выходит за пределы зоны 700, например, как в случае зоны, обозначенной позицией 1700 на фиг. 17А. Это может быть вызвано многими причинами, например: (1) кончик катетера переместился в зону 1700, а пациент не был перемещен, чтобы перевести кончик катетера в зону 700; (2) оператор по какой-то причине смотрит на зону 1700. Эта новая информация об ОИ может быть подана в систему в качестве входных данных многими способами, включая автоматическое слежение за кончиком катетера или слежение за зоной, на которую смотрит оператор, с помощью устройства отслеживания движения глаза (такого как EyeLink 1000, выпускаемое компанией SR Research Ltd., Каната, провинция Онтарио, Канада) для указания требуемого местоположения ОИ в соответствии с точкой взгляда пользователя, или с использованием компьютерной мыши для указания требуемого местоположения ОИ.
При угловом растворе сектора 702 апертуры и при постоянной скорости вращения коллиматора 500 ДНП в кольцевой области за пределами круговой зоны 700 составляет 1/10 ДНП внутри круговой зоны 700, при этом отношение сигнал/шум в кольцевой области за пределами зоны 700 составляет 1/101/2 этого отношения в зоне 700, что приводит к более низкому качеству изображения. Чтобы устранить этот недостаток и поддержать частоту регенерации отображаемых кадров равной 10 к/с при вращении коллиматора 500 в ЦО, составляющем 1/10 секунды, как в основном примере настоящего изобретения, профиль вращения можно изменить таким образом, чтобы скорость вращения коллиматора в секторе 1702 (фиг. 17В), содержащем зону 700, была уменьшена до 1/10 постоянной скорости, а скорость вращения в остальной части ЦО была увеличена для поддержания ЦО равным 1/10 секунды.
Это объясняется ниже со ссылкой на фиг. 17В и соответствующую блок-схему на фиг. 30 с использованием примера с фактически применяемыми числами.
Предположим, что угловой раствор сектора 1702, содержащего зону 1700, составляет 54 градуса (шаг 3000). Первый край сектора 1702 обозначен позицией 1702А и находится в угловом положении 63 градуса, при этом второй край сектора 1702 обозначен позицией 1702В и находится в угловом положении 117 градусов. Таким образом, среднее значение углового положения центра сектора 1700 составляет 90 градусов.
На шаге 3010 уменьшенную скорость вращения коллиматора 500 вычисляют для зоны 1702, в результате чего в зоне 1702 получают отношение сигнал/шум, аналогичное зоне 702.
В этом примере, когда край 702А сектора 702 достигает угла 63 градуса (место, обозначенное позицией 1702А), скорость вращения коллиматора 500 уменьшается до 1 об/с. Эта скорость вращения поддерживается, пока край 702В сектора 702 не достигнет положения края 1702В (117 градусов). С этого момента скорость вращения коллиматора 500 снова возрастает. На шаге 3020 вычисляют возросшую скорость вращения коллиматора 500 в зоне 704, которая позволит компенсировать изменение скорости в зоне 1702, чтобы оставить полное число оборотов в секунду неизменным. Для простоты предположим, что значения ускорения и замедления чрезвычайно высоки, поэтому интервалы времени ускорения и замедления в этом примере пренебрежимо малы. В соответствии с приведенным выше объяснением профиль вращения коллиматора 500 включает в себя 54+36=90 градусов (1/4 поворота ЦО) при скорости 1 об/с. Чтобы компенсировать это и выполнить ЦО при средней скорости 10 об/с, скорость вращения коллиматора 500 в течение оставшихся 3/4 поворота ЦО необходимо увеличить до X об/с, удовлетворяя следующему уравнению:

Поэтому:

Таким образом, в течение оставшейся части поворота на 270 градусов ЦО скорость вращения должна составлять 13 об/с.
При таком профиле вращения сектор 1702 подвергается облучению такой же ДНП, что и зона 700, при этом отношение сигнал/шум в зоне 1700 также равно требуемому отношению сигнал/шум в зоне 700.
Следует принимать во внимание, что в диапазоне секторов, находящихся за пределами сектора 1702, для которого скорость вращения коллиматора возросла до 13 об/с, ДНП становится ниже ДНП при постоянной скорости вращения, уменьшаясь до 1/13 ДНП зоны 700.
Следует также принимать во внимание, что зона 1700 была приведена здесь в качестве примера, чтобы продемонстрировать расчет профиля вращения в соответствии с различными вариантами геометрии ОИ. Зона 1700 могла бы иметь другую форму и местоположение, при этом к основной ОИ окружности 700 может быть добавлено больше одной ОИ. Такие изменения обрабатываются с помощью изменений профиля в рамках той же концепции, которая раскрыта выше.
Следует также принимать во внимание, что ускорение и замедление, упомянутые выше, могут представлять собой ненадежную часть ЦО, что необходимо учитывать. В следующем примере предположим, что каждый из интервалов ускорения и замедления занимает по 45 градусов, и что они являются равномерными. В этом случае ускорение должно начаться на 45 градусов раньше, чем край 702А окажется в положении края 1702А, а замедление начинается, когда край 702В окажется в положении 1702В. Все остальные параметры системы остаются такими же. Если X указывает скорость вращения в течение 180 градусов ЦО, a Y представляет собой среднюю скорость вращения в пределах каждого из секторов ускорения/замедления, составляющих 45 градусов, то необходимо удовлетворить следующему уравнению, чтобы поддерживать ЦО равным 0,1 с (или среднюю скорость вращения равной 10 об/с):

Учитывая постоянное ускорение и замедление в интервале между 1 об/с и 10 об/с, Y=(1+10)/2=5,5 и высокая скорость вращения в пределах 180 градусов составляет 16,75 об/с.
Следует принимать во внимание, что данный подход, представленный с помощью приведенного выше примера, применим также к другим профилям ускорения, другим коллиматорам и другим схемам работы (например, при других частотах к/с). Следует также принимать во внимание, что раскрытые выше способы коррекции пикселей полностью применимы также к регулируемым профилям скорости вращения.
Различные частоты регенерации для различных зон изображения
Выше было показано (в примере с коллиматором 500 на фиг. 5 и режимом работы при постоянной скорости вращения коллиматора, равной 10 об/с, и частоте регенерации отображаемого кадра, равной 10 к/с), что ДНП круговой зоны 700 на фиг. 7 в 10 раз выше, чем ДНП кольцевой зоны, образованной секторами 702 и 704 (для краткости называемой «кольцом»). Поэтому отношение сигнал/шум в зоне 700 также в 10 раз лучше, чем отношение сигнал/шум в кольцевой зоне. Частота регенерации всего изображения 120 (фиг. 2) такая же: 10 к/с. Временное разрешение всего кадра составляет 0,1 секунды (с). В предшествующем примере каждый отображаемый кадр сформирован из данных одного кадра, полученного от камеры 116. Зона 200 на дисплее 118 эквивалентна зоне 700 на матрице камеры. Зона 200 подвергается облучению ДНП в 10 раз более высокой, чем ДНП зоны 202, при этом отношение сигнал/шум в зоне 200 в 101/2 раз лучше, чем отношение сигнал/шум в кольцевой зоне 202. При каждом ЦО коллиматора 500 данные считываются с матрицы (датчика) 714, обрабатываются и отображаются на мониторе 118. Полное изображение 120 регенерируется при этом через каждые 0,1 с.
В следующем примере настоящего изобретения требуется улучшить отношение сигнал/шум кольцевой зоны 202.
В первом примере, хотя зона 200 регенерируется через каждые 0,1 с помощью данных, считанных с датчика 714, кольцевая зона 202 регенерируется только через каждую 1 с. В течение этой 1 с полученные от датчика 714 данные для пикселей кольцевой зоны 202 используются в целях формирования изображения кольцевой зоны, представляющего собой сумму 10 предыдущих кадров. В упрощенной форме все 10 кадров, снабженные индексами j=1-10, сохраняются в памяти. Затем для каждого из пикселей i в пределах кольцевой зоны 202 вычисляют сумму значений: Pni=∑pij. После этого корректируют и отображают Pni, где n представляет собой индексный номер для каждого набора из 10 кадров. Поэтому для j=1-10 пиксели суммированных кадров обозначаются как P1i. Для кадров j=11-20 пиксели суммированных кадров обозначаются как P2i. Для кадров j=21-30 пиксели суммированных кадров обозначаются как P3i, и т.д. Поэтому в данном примере мы получаем отображение изображения 120, где отношение сигнал/шум кольцевой зоны 202 такое же, как в зоне 200, хотя кольцевая зона 202 получает 1/10 ДНП за каждую единицу времени облучения зоны 200. Этот компромисс достигается за счет того, что кольцевая зона 202 регенерируется через каждую 1 с в отличие от регенерации зоны 200, происходящей через каждую 0,1 с, а временное разрешение кольцевой зоны 202 составляет 1 с в отличие от 0,1 с для зоны 200.
Во втором примере, после того как первые 10 кадров, снабженные индексами j=1-10, были получены, сохранены и отображены в качестве суммы пикселей для кольцевой зоны 202, регенерация кольцевой зоны 202 выполняется по-другому. Вместо сохранения отображения кольцевой зоны 202 в течение 1 с, пока не будут получены кадры j=11-20, отображаемое изображение регенерируется спустя 0,1 с следующим образом.
Кадр j=11 получают и сохраняют вместо кадра 1. Поэтому вместо ранее сохраненных кадров 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 сохраняются следующие кадры: 11, 2, 3, 4, 5, 6, 7, 8, 9, 10. Этот набор кадров обрабатывают так же, как предыдущий, после чего происходит регенерация отображения кольцевой зоны 202. Спустя еще 0,1 с кадр с индексом 12 получают и сохраняют вместо кадра с индексом 2: 11, 12, 3, 4, 5, 6, 7, 8, 9, 10. Теперь таким же образом обрабатывают этот набор и выполняют регенерацию отображения кольцевой зоны 202. Это процесс повторяется, в результате чего кольцевая зона регенерируется через каждые 0,1 с, так же, как и зона 200. Временное разрешение кольцевой зоны 202 по-прежнему составляет 1 с по сравнению с временным разрешением зоны 200, составляющим 0,1 с. Отношение сигнал/шум в кольцевой зоне 202 аналогично отношению сигнал/шум в зоне 200.
В третьем примере представлен промежуточный подход. Следуя первому примеру, вместо суммирования пикселей 10 кадров и регенерации кольцевой зоны 202 через каждую 1 с, суммирование можно выполнять через каждые 5 кадров, а регенерацию кольцевой зоны 202 производить каждые 0,5 с. Отношение сигнал/шум кольцевой зоны 202 составляет теперь 1/21/2 отношения сигнал/шум зоны 200, что по-прежнему лучше, чем 1/101/2 в основном примере коллиматора 500, а временное разрешение - только 0,5 с в отличие от 1 с в первом примере данного способа.
Следует принимать во внимание, что промежуточный подход может использоваться также и во втором примере, где, вместо того, чтобы каждый раз заменять один из 10 кадров, выполняют замену одного кадра в наборе из 5 кадров: 1, 2, 3, 4, 5, затем 6, 2, 3, 4, 5, затем 6, 6, 3, 4, 5 и т.д. Здесь мы снова получаем регенерацию кольцевой зоны 202 через каждую 0,1 с, но при временном разрешении 0,5 с, при этом отношение сигнал/шум кольцевой зоны 202 составляет теперь 1/21/2 отношения сигнал/шум зоны 200, но по-прежнему лучше, чем 1/10 в основном примере коллиматора 500.
Следует принимать во внимание, что этот способ можно также реализовать для невращающегося коллиматора, например, такого, как показан на фиг. 18. На фиг. 18А представлен вид сверху коллиматора, а на фиг. 18В - поперечный разрез с-с, показанный на фиг. 18А. Коллиматор 1800 обеспечивает выполнение такой же функции уменьшения интенсивности рентгеновского излучения, что и другие коллиматоры настоящего изобретения. У него имеется апертура 1802, позволяющая проходить через нее всему излучению в этой зоне, кольцевая зона 1806, уменьшающая излучение, проходящее через эту зону на величину, зависящую от материала (как правило, алюминия) и толщины этого материала, и кольцевая зона 1804 с толщиной, изменяющейся в зависимости от расстояния от центра, начиная с нулевой толщины на стороне апертуры 1802 и заканчивая толщиной кольцевой зоны 1806 на стороне кольцевой зоны 1806. На фиг. 18С представлен схематический график ДНП в виде функции расстояния от центра: r.
Предполагается, что за пределами кольцевой зоны 1806 излучение полностью блокируется. В рамках описания данного примера излучение, рассеивающееся из коллиматора 1800, игнорируется. В этом примере предполагается также, что ДНП излучения, проходящего через кольцевую зону 1806, составляет 1/10 ДНП излучения, проходящего через апертуру 1802. Частота кадров составляет 10 к/с, а частота регенерации отображаемого кадра - 10/с. Как описано в приведенных выше примерах, отношение сигнал/шум части изображения, связанной с кольцевой зоной 1806, равно 1/101/2 отношения сигнал/шум, связанного с апертурой 1802. Чтобы отобразить изображение, в котором отношение сигнал/шум части изображения, связанной с кольцевой зоной 1806, такое же, как отношение сигнал/шум в зоне, связанной с апертурой 1802, можно использовать любые из описанных выше способов.
На фиг. 18D изображен монитор 118 с отображаемым кадром, связанным с коллиматором 1800. Окружность 1822 представляет собой зону, связанную с излучением, поступающим через апертуру 1802 коллиматора 1800. Кольцо 1824 представляет собой зону, связанную с излучением, поступающим через кольцевую зону 1804 коллиматора 1800. Кольцо 1826 представляет собой зону, связанную с излучением, поступающим через кольцевую зону 1806 коллиматора 1800. Следует принимать во внимание, что, хотя в примере кольцевой зоны 1804 на фиг. 18В толщина изменяется линейно, в примере изменения излучения 1814 на фиг. 18С показано нелинейное изменение толщины. Таким образом, для формирования градиента толщины 1804 в соответствии с требуемым постепенным изменением излучения между кольцевой зоной 1804 и кольцевой зоной 1806 на фиг. 18В могут использоваться многие различные функции.
В первом примере, хотя зона 1822 обновляется через каждые 0,1 с за счет данных, считанных с датчика 714, кольцевая зона 1826 обновляется только через каждую 1 с. В течение этой 1 с полученные от датчика 714 данные для пикселей кольцевой зоны 1826 используются в целях формирования изображения кольцевой зоны, представляющего собой сумму 10 предыдущих кадров. В упрощенной форме, все 10 кадров, снабженные индексами j=1-10, сохраняются в памяти. Затем для каждого из пикселей i в пределах кольцевой зоны 1826 вычисляют сумму значений: Pni=∑pij. После этого корректируют и отображают Pni, где n представляет собой индексный номер для каждого набора из 10 кадров. Поэтому для j=1-10 пиксели суммы кадров обозначаются как P1i. Для кадров j=11-20 пиксели суммированных кадров обозначаются как P2i. Для кадров j=21-30 пиксели суммированных кадров обозначаются как P3i, и т.д. Поэтому в данном примере мы получаем отображение изображения 120, где отношение сигнал/шум кольцевой зоны 1826 такое же, как в зоне 1822, хотя кольцевая зона 1826 получает 1/10 ДНП за каждую единицу времени облучения зоны 1822. Этот компромисс достигается за счет того, что кольцевая зона 1826 регенерируется через каждую 1 с в отличие от регенерации зоны 1822, происходящей через каждую 0,1 с, а временное разрешение кольцевой зоны 1826 составляет 1 с в отличие от 0,1 с для зоны 1822.
Для кольцевой зоны 1824 мы используем здесь пример, в котором ДНП линейно убывает по ширине кольцевой зоны 1824 от значения ДНП в зоне 1822 до 1/10 этого ДНП, т.е. ДНП кольцевой зоны 1826.
В этом примере можно разделить кольцевую зону 1824 на 8 кольцевых зон («колец») с равным шагом по радиусу таким образом, чтобы средняя ДНП в наименьшем кольце №1 составляла 9/10 ДНП в зоне 1822, средняя ДНП в следующем кольце №2 составляла 8/10 ДНП в зоне 1822, в кольце №3 - 7/10, и так далее, до последнего кольца №8, где ДНП составляет 2/10 ДНП в зоне 1822.
При каждом упоминании значения дозы облучения со ссылкой на вышеуказанные сегменты (кольца №1 - №8) подразумевается среднее значение в этом сегменте с учетом изменения толщины коллиматора в пределах данного сегмента.
Когда цель состоит в обеспечении одинакового отношения сигнал/шум и поддержании временного разрешения до 1 с на всем отображаемом изображении 120, это легко может быть выполнено для кольца №5 (1/2 ДНП по сравнению с зоной 1822) и кольца №8 (1/5 ДНП по сравнению с зоной 1822), поскольку отношение ДНП в зоне 1822 и ДНП в кольце №5 является целым числом. То же относится к кольцу №2.
В случае кольца №5 добавление 2 временно-последовательных кадров, описанное в любом из приведенных выше способов (с соответствующей коррекцией пикселей, раскрытой выше) обеспечивает такое же отношение сигнал/шум, как в зоне 1822. Временное разрешение в этом примере составляет 0,2 с.
В случае кольца №8 добавление 5 временно-последовательных кадров, описанное в любом из приведенных выше способов (с соответствующей коррекцией пикселей, раскрытой выше), обеспечивает такое же отношение сигнал/шум, как в зоне 1822. Временное разрешение в этом примере составляет 0,5 с.
Для других колец (№1, №3, №4, №6, №7 и №8) отношение ДНП в зоне 1822 и ДНП в любом из этих колец не является целым числом. Поэтому добавление пикселей целого числа кадров (до 10 с учетом требуемого предела временного разрешения, составляющего 1 с) приведет к превышению требуемого отношения сигнал/шум или получению отношения, меньшего, чем требуемое.
Для достижения требуемого отношения сигнал/шум согласно требованиям настоящего примера можно применить следующий способ (описанный с помощью блок-схемы на фиг. 31):
1. Для каждого кольца №m добавить минимальное число пикселей временно-последовательных кадров, обеспечивающее отношение сигнал/шум, равное или большее, чем отношение сигнал/шум в зоне 1822 (шаги 3100-3120).
2. Выполнить коррекцию пикселей (смещение, нормализацию и т.д., как описано выше) (шаг 3130).
3. Добавить шум к каждому пикселю в кольце №m с целью компенсации в случаях, когда отношение сигнал/шум выше, чем в зоне 1822 (шаги 3140-3150).
Перечисленные выше шаги подробнее рассматриваются применительно к кольцу №1.
ДНП в кольце №1 составляет 9/10 ДНП в зоне 1822. Отношение сигнал/шум в кольце №1 составляет (9/10)1/2 отношения сигнал/шум в зоне 1822. Поэтому, в соответствии с приведенным выше шагом 1, необходимо добавить пиксели 2 временно-последовательных кадров в зоне кольца №1, чтобы сделать отношение сигнал/шум для пикселей в кольце №1 равным или превышающим отношение сигнал/шум в зоне 1822.
Благодаря добавлению 2 временно-последовательных кадров в зоне кольца №1 эффективная ДНП в итоговом кадре в кольце №1 составляет 18/10 ДНП в зоне 1822. Отношение сигнал/шум для пикселей в кольце №1 составляет теперь (18/10)1/2 отношения сигнал/шум в зоне 1822. Чтобы компенсировать слишком высокое отношение сигнал/шум (которое может привести к возникновению визуальных артефактов на изображении 120), к каждому пикселю добавляют гауссовый шум, чтобы удовлетворить уравнению:

где N1822 представляет собой шум, связанный с конкретным пикселем в зоне 1822 для пропускания конкретного объекта, N#1 - шум, связанный с пикселем, являющимся суммой 2 временно-последовательных пикселей в кольце №1 (суммарный пиксель), имеющем такое же пропускание объекта, после того как суммарный пиксель подвергся процессу корректировки (содержащей, в простейшей форме, деление значения просуммированных пикселей на 1,8, чтобы привести эффективную ДНП от 18/10 к значению 10/10 - такому же, как в зоне 1822), a Nadd - шум, добавляемый к суммарному пикселю, чтобы привести его отношение сигнал/шум к тому же уровню, что у эквивалентного пикселя в зоне 1822.
В приведенном выше примере, поскольку количество рентгеновских фотонов в суммарном пикселе кольца №1 составляет 1,8 эквивалентного пикселя (с таким же пропусканием объекта) зоны 1822, шум суммарного пикселя равен (1,8)1/2 эквивалентного пикселя в зоне 1822, и отношение сигнал/шум также равно (1,8)1/2 эквивалентного пикселя в зоне 1822.
Для вычисления величины Nadd используем уравнение 10 в форме:

Коррекция пикселей выполняется путем деления на 1,8.
Используем числа:
Nadd=(12-((1,81/2)/1,8)2)1/2
Nadd=0,667
Таким образом, добавляя этот пуассоновский шум к суммарному пикселю, мы придаем этому пикселю такой же шум, как у эквивалентного пикселя в зоне 1822.
Следует принимать во внимание, что все примеры вычисляются в относительном выражении, поэтому пиксель зоны 1822 принимается равным 1.
Следует принимать во внимание, что значения шума в уравнении 10 зависят от значения пикселя и, как правило, представляют собой квадратный корень среднего уровня пикселя.
Такой же способ корректировки может применяться ко всем сегментам кольцевой зоны 1824 с соответствующими настройками.
Следует принимать во внимание, что добавление пикселей последовательных кадров можно выполнять, добавляя новые кадры каждый раз перед регенерацией отображаемого кадра или используя способ FIFO, описанный выше.
Следует принимать во внимание, что деление кольцевой зоны 1824 на 8 сегментов (кольцо №1 - кольцо №8) приведено только в качестве примера. Чем больше количество сегментов, тем более равномерным будет отношение сигнал/шум в пределах кольцевой зоны 1824. Вместе с тем, возможность различать неравномерность настройки отношения сигнал/шум затрудняется из-за отношения сигнал/шум изображения, поэтому при превышении определенного количества сегментов вклад дополнительных сегментов в различимость изображения становится небольшим и может оказаться незаметным для оператора. Поэтому при выполнении конкретной процедуры можно ограничить количество кольцевых сегментов в соответствии со статистическими характеристиками сигналов и шумов.
Те же способы обработки областей с неравномерными ДНП, таких как кольцевая зона 1824 коллиматора 1800 в примере, можно использовать и для других коллиматоров настоящего изобретения, таких как показаны на фиг. 15С, фиг. 15D, и всех коллиматоров на фиг. 16, которые также формируют области с неравномерными ДНП. Эти способы можно использовать с любым коллиматором, формирующим области с различным уровнем облучения, независимо от способа, применяемого коллиматором, т.е. от того, формируются ли области с различным уровнем облучения за счет формы коллиматора, движения коллиматора, или сочетания формы и движения. Во всех случаях движения коллиматора циклы с одинаковой схемой движения упрощают улучшение качества изображения, как описано выше, но не являются обязательным требованием, обеспечивающим описанное выше улучшение качества изображения.
В приведенном выше примере, касающемся зоны 1826 изображения (фиг. 18D), соответствующей кольцевой зоне 1806 (фиг. 18А), рассматривалась базовая обработка зоны 1826 изображения: поскольку излучение здесь составляло 1/10 излучения в зоне 1822, для формирования обработанной зоны 1826 с таким же отношением сигнал/шум, как в зоне 1822, можно суммировать последние 10 кадров в зоне 1826.
При другом подходе можно достичь компромиссного отношения сигнал/шум в зоне 1826 путем добавления меньшего количества кадров. Например, можно предпочесть вариант суммирования только 5 кадров и получить отношение сигнал/шум, составляющее 0,71 отношения сигнал/шум в зоне 1822, но, действуя таким образом, улучшить временное разрешение зоны 1826 в 2 раза по сравнению с вариантом суммирования 10 кадров.
Для компенсации итоговой яркости, составляющей в этом примере 1/2 яркости в зоне 1822, значение каждого пикселя в зоне 1826 можно умножить на 2. В более общем смысле, если нужно суммировать М кадров, чтобы получить яркость, соответствующую яркости в зоне 1822, и, вместо этого, суммируют m кадров (m может быть любым положительным числом), значения пикселей в зоне 1826 следует умножить на M/m.
Следует принимать во внимание, что количество суммируемых кадров необязательно должно быть целым числом. Например, можно суммировать 4,5 кадра. В этом примере FRMn представляет собой последний кадр, FRMn-1 - предыдущий кадр и т.д. Суммирование последних 4,5 кадров может принимать следующий вид (для каждого пикселя):
SUM=(FRMn)+(FRMn-1)+(FRMn-2)+(FRMn-3)+0,5X(FRMn-4).
Для настройки яркости при этом используется коэффициент 10/4,5.
В некоторых случаях, вследствие изменения спектра излучения, проходящего через кольцевую зону 1806 (а также 1804), рентгеновское излучение в этой зоне испытывает воздействие более низкого коэффициента поглощения при прохождении через тело пациента. Поэтому, хотя при отсутствии пациента или другого поглощающего объекта излучение в зоне 1826 составляет 1/10 излучения в зоне 1822, при наличии поглощающего объекта отношение эффективного излучения в зоне 1826 превышает 1/10 эффективного излучения в зоне 1822. Оно может, например, быть равно 1/8. В таком случае добавление 8 последних кадров удовлетворяет критериям как отношения сигнал/шум, так и яркости (аналогичной этим величинам в зоне 1822). Это обстоятельство можно использовать, чтобы суммировать меньшее количество кадров, особенно в темных зонах (с высоким коэффициентом поглощения).
В еще одном примере настоящего изобретения, когда ОИ сдвигается в зону 1700, как показано на фиг. 17А, вместо регулирования профиля вращения коллиматора 500, как объяснялось со ссылкой на фиг. 17В, весь коллиматор можно линейно сместить в направлении, параллельном плоскости коллиматора 500, так, чтобы рентгеновское излучение, проходящее через круговую апертуру 504 на фиг. 5, было теперь центрировано относительно зоны 1700, как показано на фиг. 19А, на матрице 710 камеры.
Предполагается, что только излучение, поступающее на входную поверхность 112 коллиматора, представляет собой излучение, проходящее через апертуру коллиматора 500 (круговое отверстие 505 и секторное отверстие 506). Поэтому зона 1902 на матрице затемнена на фиг. 19А (никакое излучение не поступает в соответствующую часть входной зоны 112 усилителя изображения), и только зона, содержащая секторы 700, 702 и 704, заданные границей 712, подвергается облучению. Облучаемая зона представляет собой, таким образом, область перекрытия между двумя окружностями с центрами, сдвинутыми относительно друг друга, обозначенную на фиг. 19А позиционным указателем 1900.
Эта требуемая функция настоящего изобретения реализована здесь в пределах зоны 1900 с помощью кругового отверстия 504, обеспечивающего более высокую ДНП в зоне 700, и секторного отверстия 506, связанного с оставшейся частью зоны изображения и обеспечивающего только 1/10 ДНП отверстия 504.
На фиг. 19В показан вариант внешнего вида изображения на фиг. 2 в соответствии с примером на фиг. 19А.
Коллиматор 500 может перемещаться в плоскости X-Y (см. систему координат 126 на фиг. 1А) с помощью любой общей механической системы X-Y. Например, кольцеобразная неподвижная часть 1016 на фиг. 10С присоединена к системе X-Y, а не к конструкции рентгеновской трубки, при этом система X-Y соединена с конструкцией рентгеновской трубки, тем самым, позволяя коллиматору на фиг. 10С, в данном примере, перемещаться в плоскости X-Y согласно требованиям в примере на фиг. 19А.
Следует принимать во внимание, что раскрытые выше способы, такие как коррекция пикселей, настройка соотношения сигнал/шум, добавление пикселей различных кадров, полностью применимы к примеру на фиг. 19А при использовании регулировки смещения коллиматора. Способ сдвига в плоскости X-Y применим к любому из коллиматоров настоящего изобретения.
Следует принимать во внимание, что смещение вдоль линии (например, оси X) вместо плоскости X-Y также может применяться тем же способом с ограничением зон ОИ, обработка которых при этом может производиться в пределах зоны изображения 120.
Двухкоординатные механические системы X-Y могут иметь многие различные конструкции, включая такие как двухкоординатный электроприводной стол ZXW050HA02, выпускаемый компанией Shanghai ZhengXin Ltd, Шанхай, Китай. Проектирование по заказу двухкоординатных механических систем является общепринятым в данной области техники и часто применяется, чтобы обеспечить оптимальное соответствие требованиям конкретного применения. Одним из таких поставщиков проектируемых по заказу двухкоординатных механических систем является компания LinTech, Монровия, штат Калифорния, США.
Следует принимать во внимание, что диаметр коллиматора 500 можно увеличить так, чтобы длина сектора 702 увеличилась до r3, как показано на фиг. 20В. На фиг. 20А показан коллиматор, изображенный на фиг. 5, который представлен здесь как фиг. 20А в целях удобства сравнения с коллиматором на фиг. 20В. Угол 508 такой же (36 градусов в данном примере), диаметр круглого отверстия 504 такой же (r1). R3 достаточно велик, чтобы полностью вместить поле обзора входной зоны 112 усилителя изображения также и в случае, когда коллиматор смещен в поперечном направлении, как объясняется со ссылкой на фиг. 19. При данной конструкции вся зона 120 изображения на фиг. 19В остается активной, без затемненной зоны, такой как 1902 в примере на фиг. 19. Такое увеличение коллиматора может быть реализовано в любом коллиматоре настоящего изобретения.
В примере, показанном на фиг. 19, где максимальное требуемое смещение выполняется до точки, в которой край кругового отверстия 700 оказывается в состоянии одноточечного контакта где-либо на краю изображения 712 (примером такой точки является точка 1904 на фиг. 19А), требуемый радиус r3 секторного отверстия можно вычислить следующим образом (см. ФИГ. 20В):

где А - диаметр входной зоны В 112 усилителя изображения (см. ФИГ. 3), масштабированный в соответствии с его проекцией на плоскость коллиматора. Таким образом:

В процессе перемещения коллиматора в плоскости X-Y пиксели, подвергавшиеся облучению полной ДНП (через зону 504), могут изменить свое состояние и подвергаться теперь воздействию 1/10 ДНП, поскольку зона 504 переместилась, и такие пиксели больше не входят в эту зону. Следует принимать во внимание, что спустя 1 с пиксель изменяет свое состояние, в котором он пребывает в зоне 504 и облучается полной ДНП, на пребывание за пределами зоны 504 и облучение 1/10 ДНП; учитывая режим работы в этом примере, 10 кадров с 1/10 ДНП уже были получены, и обработка этого пикселя выполняется любым из описанных выше способов, использующим последние 10 кадров для обеспечения такого же отношения сигнал/шум, как в зоне 504 (или 5 кадров спустя 0,5 с в другом примере). В течение 1-секундного переходного периода требуется другой вид обработки, чтобы поддерживать отношение сигнал/шум для этого пикселя таким же, каким оно было, когда он находился в зоне 504.
Обратимся теперь к фиг. 32. На шаге 3200 пиксели из текущего кадра добавляют к сумме пикселей, затем рассматривается следующий кадр (шаг 3210). Кадры, суммированные до этого момента в течение переходного периода, объединяют в виде взвешенной суммы с полными данными ДНП (шаг 3220), где полные данные ДНП взвешивают, чтобы компенсировать более низкие значения ДНП в новых кадрах и сохранить постоянное отношение сигнал/шум. Например, когда один кадр оказывается в состоянии перехода, отображение включает в себя взвешенную сумму 90% полной ДНП и один новый кадр. После двух кадров получаем 80% полной ДНП и два новых кадра, и так далее. Вес полной ДНП ослабляет эффективную дозу, представляя ДНП, необходимую для поддержания отношения сигнал/шум пикселей таким же, каким оно было, когда пиксели находились в зоне 504.
На шаге 3230 выполняется нормализация, после чего отображается обновленное изображение (шаг 3240). Процесс продолжается до завершения полного ЦО, когда новые кадры постепенно приобретают больший вес по сравнению со старыми полными данными ДНП. После прохождения 10 кадров переходный период заканчивается, и может начаться применение способов, например, таких как способ, описанный на фиг. 28С (шаг 3260).
Ниже приведен еще один пример для дополнительного разъяснения. В данном примере, при частоте регенерации, равной 0,1 с и временном разрешении, изменяющемся от 0,1 с до 1 с, реализуется следующая процедура, где N - индекс последнего кадра с полной ДНП для этого пикселя.
1. В момент времени 0 отображают для пикселя последние полные данные ДНП кадра N, составляющие 100%. Временное разрешение составляет 0,1 с.
2. В момент времени 0,1 с отображают для пикселя взвешенную сумму, составляющую 90% последних полных данных ДНП кадра N и 100% новых данных ДНП кадра N+1.
3. В момент времени 0,2 с отображают для пикселя взвешенную сумму, составляющую 80% последних полных данных ДНП кадра N, 100% данных ДНП кадра N+1 и 100% данных ДНП кадра N+2.
4. …
5. …
6. …
7. …
8. …
9. …
10. В момент времени 0,9 с отображают для пикселя взвешенную сумму, составляющую 10% последних полных данных ДНП кадра N и 100% новых данных ДНП каждого из кадров N+1, N+2, …, N+9.
11. В момент времени 1,0 с отображают для пикселя взвешенную сумму, составляющую 0% последних полных данных ДНП кадра N и 100% новых данных ДНП каждого из кадров N+1, N+2, …, N+9, N+10. Временное разрешение теперь изменилось и составляет 1 с.
12. Продолжают, используя описанные выше способы для улучшения качества изображения в областях с 1/10 ДНП. Временное разрешение составляет 1 с.
Следует принимать во внимание, что в случае применения способа, в котором регенерация пикселей с 1/10 ДНП выполняется с частотой только 1 к/с, последние полные данные ДНП представляют для момента времени 1 с после изменения дозы облучения пикселя на 1/10 ДНП, а в дальнейшем для регенерации пикселя будет использоваться среднее значение последних 10 кадров с 1/10 ДНП.
В случае когда пиксель изменяет свой состояние в противоположном направлении, т.е. переходит из зоны с 1/10 ДНП в зону с полной ДНП, этот переход выполняется мгновенно, и спустя первый интервал 0,1 с после изменения состояния отображаемое изображение регенерируется с использованием первого кадра с полной ДНП, полученного через 0,1 с.
Следует принимать во внимание, что, как объяснялось со ссылкой на фиг. 1А, раскрытые выше способы применимы также к относительно высокочастотному импульсному рентгеновскому излучению. Термин «относительно высокочастотный» относится к конструкции и режиму работы коллиматора. В примере коллиматора 500 на фиг. 5, имеющего угол раствора сектора, равный 36 градусам, и вращающийся со скоростью 10 об/с, частота импульсов должна составлять по меньшей мере 100/с, чтобы на каждую 36-градусную зону кадра приходился по меньшей мере один импульс рентгеновского излучения. Для упрощения схемы корректировки пикселей желательно также, чтобы частота импульсов рентгеновского излучения представляла собой результат умножения минимальной частоты на положительное целое число. В данном примере: 200/с, 300/с, 400/с и т.д. В этом примере 1000/с (минимальная частота, умноженная на 10) может считаться относительно высокой частотой.
Следует принимать во внимание, что ни один коллиматор не является полностью непрозрачным для рентгеновских лучей, при этом коллиматоры выполняют с целью блокирования большей части рентгеновского излучения в непрозрачных областях. При СПО (слое половинного ослабления), составляющем 0,25 мм (как у свинца), коллиматор толщиной 3 мм позволяет проходить через него 0,5(3/0,25)=1/4096 падающего рентгеновского излучения (без рассеивания). Для описания таких практически используемых коллиматоров будет применяться термин «по существу непрозрачный». Большинство описанных выше коллиматоров сформированы из по существу непрозрачной области, такой как зона 518 на фиг. 5, и апертур или отверстий, таких как 504 и 506 на фиг. 5. От них отличаются коллиматоры, один из которых показан на фиг. 18, поскольку, в дополнение к по существу непрозрачной области 1806 и апертуре 1802, они содержат полупрозрачные области, такие как зона 1804 на фиг. 18А.
Коллиматоры согласно настоящему изобретению могут монтироваться на рентгеновской системе в качестве автономного устройства или вместе с другим коллиматором, например, выполненным с возможностью ограничения рентгеновского излучения частью входной зоны 112 усилителя изображения. Коллиматоры настоящего изобретения и другие коллиматоры могут размещаться в любом порядке вдоль траектории рентгеновского излучения. Облучаемая часть зоны 112 представляет собой область, оставшуюся после наложения зон всех коллиматоров на пути блокирования рентгеновского излучения. В конструкции с таким последовательным расположением расстояния каждого из коллиматоров от источника рентгеновского излучения и расстояние до зоны 112 необходимо рассчитывать с учетом геометрии коллиматоров, как описано выше, чтобы получить требуемые функциональные возможности.
Оптимизация изображения с помощью динамической ОИ и датчика отслеживания движения глаза
В другом примере любой из приведенных выше примеров коллиматоров и обработки изображения (а также примеров, которые не были описаны выше) можно использовать с датчиком отслеживания движения глаза для дополнительного улучшения качества изображения, воспринимаемого пользователем. В типичной системе формирования рентгеновских изображений в многокадровом режиме задают зону, расположенную, как правило, в центре изображения, для определения параметра, называемого обычно яркостью изображения. Иногда на основе этой зоны определяют также контрастность изображения. Как правило, эта зона меньше, чем все изображение, однако она может также иметь размер, равный размеру всего изображения.
На основе содержимого изображения в этой зоне можно определять различные параметры, связанные с качеством изображения и позволяющие оптимизировать изображение, воспринимаемое пользователем, такие как:
1. ток рентгеновской трубки (в непрерывном или импульсном режиме);
2. пиковое анодное напряжение ПАН рентгеновской трубки;
3. длина импульса рентгеновских лучей;
4. автоматическая регулировка усиления АРУ (AGC), аналоговая или цифровая;
5. коррекция или регулировка тона изображения, реализуемая в виде различных функций, таких как яркость, контрастность, гамма-функция, смещение, усиление, линейные функции n-й степени, нелинейные функции и т.д.
Один из примеров оптимизации изображения в соответствии с содержимым изображения в этой зоне состоит в идентификации 10% наиболее ярких пикселей в этой зоне, вычислении среднего значения этих пикселей и регулировке усиления (умножении значения каждого пикселя на постоянный коэффициент) таким образом, чтобы установить среднее значение на уровень 240 в 8-битовой системе отображения, обеспечивающей уровни отображения в диапазоне от 0 до 255.
Типичный результат такого изменения параметров с использованием данных изображения в заданной зоне заключается в том, что изображение в этой зоне оптимизируется в соответствии с содержимым указанного изображения для визуального восприятия пользователем, при этом части изображения, находящиеся за пределами этой зоны, могут оставаться неоптимизированными для визуального восприятия пользователем.
Например, в зоне оптимизации может быть представлено легкое. Поскольку легкое относительно прозрачно для рентгеновского излучения, оптимизация уменьшает излучение, чтобы легкое визуально отображалось с требуемой яркостью. В результате позвоночник, расположенный рядом, но за пределами зоны оптимизации, выглядит темным, и различимость деталей может быть утрачена. Чтобы устранить этот недостаток, в существующем уровне техники тело пациента перемещают, пока позвоночник не окажется в зоне оптимизации, при этом выполняется оптимизация позвоночника, который становится более ярким. Однако теперь легкое становится слишком ярким, и качество деталей легкого на изображении ухудшается. Этот конфликт можно разрешить, используя манипулирующие рентгеновским излучением коллиматоры, такие как описаны выше, вместе с датчиком отслеживания движения глаза.
Согласно настоящему изобретению управление входными параметрами рентгеновской трубки можно осуществлять автоматически или с помощью задаваемых пользователем настроек, чтобы повысить/отрегулировать интенсивность (и получить надлежащее качество изображения) в пределах ОИ и гарантировать, что определенные элементы (такие как стент, инструмент или анатомическая структура) различимы и отчетливо видны.
В настоящем примере ОИ не является статической, а, вместо этого, отслеживает координаты взгляда пользователя. Датчик отслеживания движения глаза обеспечивает поток данных (x, y) о точке взгляда пользователя на экране. ОИ перемещают в соответствии с этими координатами, выполняя дополнительную регулировку коллиматора и оптимизацию изображения, входящего в ОИ, на которую направлен взгляд пользователя.
В результате изображение оптимизируется в зоне, куда смотрит пользователь, и в которой ему необходимо получить наилучшее изображение в любой момент времени без необходимости выполнять ручные регулировки или компенсацию функции автоматической оптимизации изображения.
Следует принимать во внимание, что эту функцию можно использовать на протяжении всей процедуры, или только в течение требуемых интервалов процедуры.
Изображение может быть оптимизировано согласно ОИ с использованием любого из вышеуказанных параметров или любого другого параметра, модифицирующего отображаемое значение пикселя на изображении.
Следует также принимать во внимание, что ОИ необязательно должно располагаться по центру точки взгляда. Требуемую оптимизацию можно выполнить также, когда ОИ выбрана таким образом, чтобы она содержала точку взгляда.
Следует принимать во внимание, что раскрытый выше способ оптимизации можно применять без использования любого из приведенных выше примеров коллиматоров и примеров обработки изображения. Этот способ можно применять к системе формирования рентгеновских изображений в многокадровом режиме, использующей в целом равномерную ДНП по всему полю обзора входной зоны 112 усилителя изображения. Датчик отслеживания движения глаза добавляют к такой системе формирования рентгеновских изображений в многокадровом режиме для обнаружения точки взгляда оператора в зоне изображения. Вышеуказанная оптимизация выполняется при этом для зоны изображения, содержащей точку взгляда оператора, как описано выше.
Обработка фонового изображения с помощью функции коррекции тона
Один из эффектов при использовании коллиматора того типа, который описан со ссылкой на фиг. 18А - фиг. 18D, состоит в изменении спектра рентгеновского излучения в фоновой области (кольцо 1806) в сравнении с ОИ (кольцо 1802). Результатом уменьшения ДНП рентгеновского излучения при его прохождении через фильтр фона (кольцо 1806) является изменение спектра рентгеновского излучения в этой зоне изображения по сравнению с зоной ОИ изображения (в краткой форме - ОИ). Это, в свою очередь, приводит к другим характеристикам поглощения рентгеновского излучения в человеческой ткани (или любом другом материале) в фоновой области в сравнении с ОИ. В примере коллиматора, связанного с фиг. 18А - фиг. 18D, и, рассматривая также пример, в котором количество фотонов на пиксель в фоновой области составляет 10% количества фотонов на пиксель в ОИ в отсутствие пациента или фантома (110 на фиг. 1А), можно предположить, что при умножении значения каждого пикселя фона на 10 (или при суммировании последних 10 фоновых изображений, как описано выше), фоновое изображение становится похожим на изображение в ОИ. Это не типичный случай. Как правило, для того, чтобы фоновое изображение выглядело более похожим на изображение ОИ, требуется более сложная функция тоновоспроизведения. Это подробнее объясняется со ссылкой на фиг. 21А - фиг. 21С.
Следует принимать во внимание, что сделанный выше выбор 10% является произвольным и приведен только в качестве примера. Могут быть выбраны и другие значения в диапазоне от 1% до 90%, а также любое значение, большее нуля и меньшее 100%. Корректировка описания для значений, отличных от 10%, понятна для специалиста в данной области техники.
Типичным инструментом, применяемым в поле рентгеновского излучения для исследования, измерений, калибровок и оценок изображения, является 10-ступенчатый оптический клин, показанный на фиг. 21А. Он может выполняться из многих материалов. Помещая такой ступенчатый оптический клин на пути рентгеновского излучения вместо пациента 110, показанного на фиг. 1А, получают изображение полос, при этом пиксели в каждой прямоугольной полосе имеют относительно близкое значение по сравнению с разностью между пикселями соседних ступеней (предполагая относительно высокое отношение сигнал/шум). Среднее значение в каждой полосе может быть измерено для получения значений 11 пунктирных столбиков 2104, показанных на фиг. 21В. Горизонтальная ось представляет относительную толщину ступеней, число ноль представляет отсутствие поглощения (только полоса воздушной среды), число 1 представляет самую тонкую ступеньку ступенчатого оптического клина 2110, а число 10 - самую толстую ступеньку ступенчатого оптического клина 2110, которая в данном примере в 10 раз толще самой тонкой ступеньки.
Вертикальная ось представляет значение пикселя. В этом примере была выбрана 12-битовая система, обеспечивающая динамический диапазон 0÷4095. 12-битовая система была выбрана для этого примера, поскольку эта система популярна в области обработки цифровых изображений, однако следует принимать во внимание, что для реализации настоящего изобретения можно использовать любую систему, причем адаптация к другой системе может легко быть выполнена специалистом в данной области техники, поэтому объем изобретения не ограничивается данным примером.
Кроме того, в данном примере средний уровень пикселей в воздушной среде был задан равным 4000, что обеспечивает 95 дополнительных уровней для пиксельного шума и позволяет избежать цифровой отсечки шумов высокого уровня при 4095. Этот выбор сделан в качестве примера, при этом следует понимать, что шум в таких системах зависит от ДНП рентгеновского излучения, и что значение пропускания воздушной среды должно соответствовать предпочтительным характеристикам рентгеновского излучения.
В данном примере фильтрование рентгеновского излучения по интенсивности в фоновой области, которое приводит к изменению спектрального распределения рентгеновского излучения в фоновой области, изменит характеристики коэффициента поглощения при прохождении через тот же ступенчатый оптический клин 2100. Итоговые значения пикселей для фонового излучения на каждой ступени показаны в виде 11 черных столбиков 2106 на фиг. 21В.
При реализации первого процесса обработки фоновой области путем добавления 10 фоновых кадров, как описано выше (или умножения каждого фонового пикселя на 10), значение первоначально обработанного фонового пикселя на нулевой ступени становится сходным со значением пикселя ОИ на нулевой ступени, как показано крайним левым штрихованным столбиком среди 11 штрихованных столбиков 2108, представляющих среднее значение ступени в фоновой области, после добавления последних 10 кадров.
При сравнении столбиков 2108 со столбиками 2104 становится очевидным, что, за исключением нулевой ступени, все 10 оставшихся столбиков 2108 имеют более высокие значения, чем 10 оставшихся столбиков 2104. Это является следствием другой величины поглощения в фоновой области из-за спектрального изменения, внесенного кольцевой зоной 1806 фильтра на фиг. 18А. Например, среднее значение пикселя ступени 5 в ОИ равно 1419, но в первоначально обработанной фоновой области оно равно 2005. Это приводит к явному различию между первоначально обработанным фоновым изображением и изображением ОИ.
Для решения этой проблемы требуется дополнительный шаг обработки зоны фонового изображения (в краткой форме - фоновой области, или фона). Такая функция коррекции, применительно к зоне ОИ и фоновой области ступеней на фиг. 21В, показана в виде функции 2112 на фиг. 21С и будет называться здесь «функцией коррекции тона». Процесс изменения изображения с использованием функции коррекции тона будет называться «коррекцией тона».
Функцию коррекции тона 2112 создают, вычисляя коэффициенты коррекции тона для каждой из 11 полос, чтобы привести среднее значение полосы в фоновой области к такому же среднему значению пикселя в зоне ОИ. Каждый такой коэффициент представляет собой отношение среднего значения пикселя ступени в ОИ к среднему значению пикселя ступени в фоновой области. Коэффициенты для коррекции значений пикселей между этими вычисленными значениями могут быть получены с использованием интерпретации любого вида, такой как кубическая интерполяция или подбор функции для 11 вычисленных точек, например, экспоненциальной или n-размерной линейной функции. Из этого примера очевидно, что, чем меньше значение пикселя в фоновой области, тем меньше коэффициент коррекции. Например, для значения 762 первоначально обработанного фонового пикселя коэффициент коррекции равен 0,44 (2114 на фиг. 21С), в то время как для значения 2524 первоначально обработанного фонового пикселя коэффициент коррекции равен 0,79 (2116 на фиг. 21С).
Коррекция тона в этом примере предполагает умножение каждого пикселя в первоначально обработанной фоновой области на соответствующий коэффициент согласно примеру на фиг. 21С.
Функция коррекции тона на фиг. 21С используется для дополнительной обработки первоначально обработанной фоновой области путем умножения каждого из первоначально обработанных фоновых пикселей на соответствующий коэффициент (коэффициент коррекции фоновых пикселей), обеспечиваемый с помощью функции 2112 тоновоспроизведения.
Следует принимать во внимание, что, хотя в этом примере фоновая область обрабатывалась, чтобы добиться ее сходства с ОИ, можно также использовать тот же подход для обработки ОИ, чтобы добиться ее сходства с фоновой областью. Можно также выполнить первоначальную обработку фоновой области и тоновоспроизведение на ОИ относительно фоновой области. Нужно только поменять местами слова «фоновая область» и «ОИ» в данном примере, чтобы получить описание такой коррекции тона.
Следует также принимать во внимание, что первоначальная обработка, которая приводит к получению близких значений полос для ОИ и фоновой области, не является обязательным требованием для коррекции тона. Коррекция тона может быть выполнена без вышеупомянутой первоначальной обработки или с использованием первоначальной обработки, рассчитанной, например, на приведение нулевой ступени фоновой области к половинному значению нулевой ступени ОИ. Это можно сделать, например, добавляя 5 последних изображений вместо 10 последних изображений в присутствующее 10%-е фоновое излучение. Процесс коррекции тона будет таким же, отличается только функция коррекции тона (вычисляемая тем же способом).
Вычисление функции коррекции тона с помощью ступенчатого оптического клина
В следующем примере более подробно представлен способ формирования функции коррекции тона для фонового изображения, чтобы оно выглядело аналогично ОИ. При описании данного способа обратимся к фиг. 33А.
Первый этап способа представляет собой сбор данных.
Для сбора данных применяется фантом с переменным поглощением, обеспечивающий различные уровни поглощения в пределах зоны изображения. Такой фантом может состоять из ступенчатого оптического клина (такого как показан на фиг. 21А), фантома в виде линейного клина, фантома переменной толщины с непрерывной наклонной функцией, фантома произвольной толщины или любого другого фантома с переменным поглощением, обеспечивающего достаточное количество точек измерения в динамическом диапазоне изображения (0÷4095 в 12-битовой системе), разумно распределенных по динамическому диапазону для обеспечения требуемой точности. Следует принимать во внимание, что чем большим будет количество полос, более равномерно распределенных по динамическому диапазону, тем более точной будет функция коррекции тона. Ступенчатый оптический клин, состоящий из 10 ступеней, был бы разумным выбором для получения приемлемой точности.
Предпочтительным материалом для фантома с переменным поглощением ФПП (VAP) был бы материал, ведущий себя аналогично живой ткани. Принято считать, что вода достаточно точно отражает свойства живой мягкой ткани. Существуют материалы, которые рассматриваются в качестве эквивалента воды и применяются для выпуска фантомов, например, «пластиковая вода», выпускаемая компанией Supertech, Элкхарт, штат Индиана, США. При использовании таких материалов сбор данных больше походит на реакцию спектра отфильтрованного фонового излучения и спектра излучения ОИ на живую мягкую ткань. В таком фантоме с переменным поглощением могут также использоваться материалы, являющиеся эквивалентом костной ткани, однако специалисту в данной области техники понятно, что это было бы просто продолжением обсуждения применения мягкой ткани, поэтому этот вариант не будет рассматриваться здесь более подробно.
Фантом с переменным поглощением (ФПП) помещают в систему, показанную на фиг. 1А, вместо пациента 110.
Получают изображение или набор изображений для данного ПАН1. Причина использования ПАН в качестве параметра состоит в том, что спектр рентгеновского излучения зависит от ПАН и, вследствие этого, каждая кривая коррекции тона вычисляется для данного ПАН. Получаемые изображения рассчитаны таким образом, что, в примере со ступенчатым оптическим клином, каждую полосу получают с каждым из рентгеновских спектров ОИ и фоновой области. Таким образом, либо часть полосы находится в ОИ, а другая часть - в фоновой области, либо в одном изображении полоса находится в ОИ, а в другом изображении эта полоса находится в фоновой области.
Далее, в этом примере мы модифицируем значения фоновых пикселей, используя ОИ в качестве эталона и настраивая фоновую область так, чтобы она выглядела аналогично ОИ. Следует принимать во внимание, что значения пикселей ОИ можно регулировать, чтобы привести внешний вид ОИ в соответствие с фоновой областью (или использовать другие альтернативные варианты, как обсуждалось выше), но поскольку этот метод полностью аналогичен данному примеру, он не будет рассматриваться здесь подробнее.
С этой целью для каждой ступени i (включая нулевую ступень для воздушной среды) вычисляют среднее (AVG) 2 групп пикселей:
1. (шаг 3300) пиксели ступени i, находящиеся в ОИ: AVGri
2. (шаг 3305) пиксели ступени i, находящиеся в фоновой области: AVGbi
Эти два числа используют теперь (шаг 3310) для вычисления значения функции коррекции тона для фонового пикселя, имеющего уровень AVGbi: F(AVGbi):
F(AVGbi)=AVGri/AVGbi
В примере, использующем 10 ступеней ступенчатого оптического клина + одна ступень воздушной среды, предусмотрен набор из 11 значений функции коррекции тона:
{F(AVGb0), F(AVGb1), F(AVGb2), …, F(AVGb10)}
В примере с 12-битовой системой отображения требуются 4096 корректировочных значений, чтобы каждое возможное значение пикселя в фоновой области имело соответствующее значение функции коррекции тона. Такие значения сверх 11 значений, вычисленных выше, можно оценить, используя любые методы интерполяции и экстраполяции (шаг 3320), такие как подбор линейной функции, подбор линейной функции 2-й степени или любой n-степени, подбор экспоненциальной функции и т.д. Концепция остается той же самой, различие заключается в точности вычисления функции коррекции тона, оцениваемой обычно по степени сходства с ОИ, достигаемого фоновой областью после коррекции. Это можно продемонстрировать с помощью следующего примера.
Представлен пример таблицы для ступенчатого оптического клина, используемой с целью измерения значений функции для каждой из 10 ступеней плюс воздушная ступень.
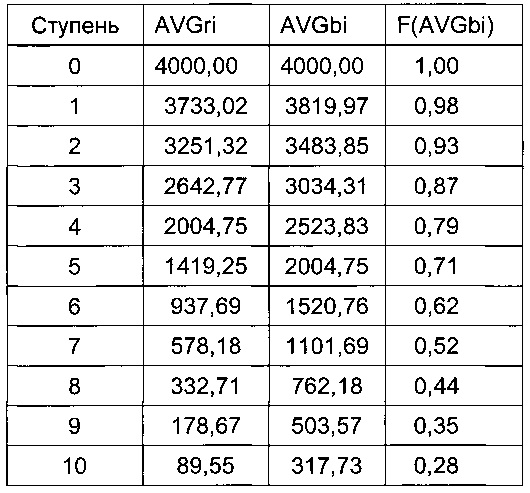
В этом примере нулевая ступень представляет собой зону без поглощения, т.е. зону за пределами ФПП. В данном примере фоновая область подвергается также первоначальной обработке (такой как добавление последних 10 кадров для компенсации 10% фонового излучения, как подробно описано выше). По этой причине AVGr0=AVGb0. Кроме того, в этом примере облучение задано таким, чтобы AVGr0=4000. Для того или иного ПАН это выполняют, определяя, например, ток в мА (миллиамперах) в системе непрерывного формирования рентгеновских изображений в многокадровом режиме, или определяя заряд на импульс в импульсной рентгеновской системе (миллиампер-секунда: мА-с). В контексте настоящего обсуждения мы ссылаемся на мА-0 как на величину, указывающую значение настройки тока рентгеновской трубки для получения AVGr0=4000.
Таким образом, для получения коэффициентов коррекции для диапазона 0÷4095 необходима интерполяция для диапазона 319÷3999 и экстраполяция для диапазонов 0÷317 и 4001÷4095. Это можно выполнить, используя один из многих предлагаемых способов подбора эмпирической кривой, например, с помощью программного пакета MatLab, выпускаемого компанией MathWorks, Inc., Натик, штат Массачусетс, США. Конкретный способ подбора, как правило, зависит от данных.
Следует принимать во внимание, что для вычисления функции коррекции тона необязательно выполнять все шаги, но обычно использование большего количества шагов позволяет получить более точную функцию коррекции тона.
Следует принимать во внимание, что при подборе кривой всегда ожидается, что кривая пройдет через точку (AVGb, F(AVGb)) = (0,0). Иными словами, когда толщина поглощающей среды настолько велика, что излучение полностью блокируется этой толщиной, значение коррекции тона в этой точке равно нулю.
Приведенный выше пример можно проиллюстрировать 2 дополнительными строками в таблице, представляющими относительную толщину 200 и бесконечность:
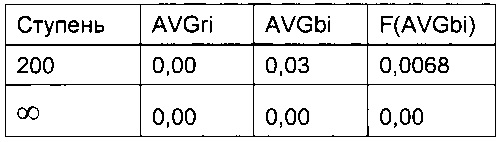
Таким образом, эту дополнительную точку (0,0) можно дополнительно использовать с любым набором измерений для лучшего подбора кривой.
Следует принимать во внимание, что для коррекции тона, описанной выше, существенны не только 2 зоны изображения, такие как ОИ (1822 на фиг. 18D, соответствующая области 1802 фильтра на фиг. 18А и фиг. 18В) и фоновая область (1826 на фиг. 18D, соответствующая области 1806 фильтра на фиг. 18А и фиг. 18В). Существенны и другие зоны изображения, такие как переходная зона 1824 на фиг. 18D, соответствующая области 1804 фильтра на фиг. 18А и фиг. 18В. В примере переходной зоны 1824 спектр рентгеновского излучения постепенно изменяется как функция расстояния от центра ОИ вследствие текущего изменения толщины фильтра в пределах кольцевой области 1804. Следует принимать во внимание, что кривая коррекция тона, рассчитанная для фоновой области 1826, не будет оптимальной для переходной области 1824.
Поэтому желательно разделить переходную зону 1824 на некоторое количество переходных подзон, каждая из которых имеет относительно равномерный рентгеновский спектр после фильтрации. Для каждой такой переходной подзоны вычисляют функцию коррекции тона (для каждого ПАН) и используют ее, чтобы корректировать тон в соответствующей переходной подзоне.
При другом подходе функцию коррекции тона для конкретной подзоны можно оценить по функции коррекции тона фоновой области, учитывая толщину фильтра в конкретной переходной подзоне. Например, при толщине переходной подзоны, близкой к толщине фоновой области, функция коррекции тона будет близка к функции коррекции тона фоновой области. Один пример для такой оценки значений коррекции тона представлен в следующей таблице.
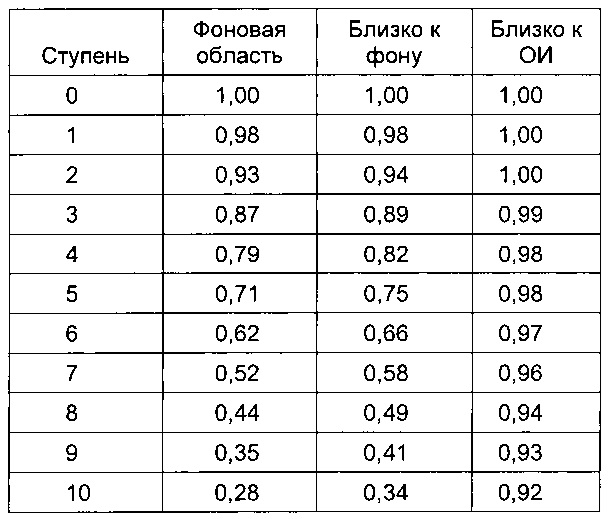
Значения для «Близко к фону» и «Близко к ОИ» оценивают по фоновым значениям с помощью экспоненциальной оценки в следующем виде:
Оценочное_значение = Фоновое_значениеЕ,
где Е=0,85 для оценки значений «Близко к фону» и Е=0,07 для оценки значений «Близко к ОИ».
Можно использовать многие другие варианты оценки. Экспоненциальная оценка достаточно хорошо поддерживает характеристики экспоненциального поглощения рентгеновского излучения в веществе.
Описанный выше способ реализуется для некоторого диапазона значений ПАН с целью формирования функции коррекции тона для каждого такого значения ПАН. Например, в диапазоне от 50 ПАН до 150 ПАН 5 функций коррекции тона могут формироваться для 50, 75, 100, 125 и 150 ПАН.
В случае, например, когда 90 ПАН используют с пациентом, функцию коррекции тона можно интерполировать по функциям коррекции тона, вычисленным для 75 ПАН и 100 ПАН, используя линейную или любую другую интерполяцию. Интерполированную функцию коррекции тона можно теперь использовать для коррекции тона фоновой области, генерируемой при излучении 90 ПАН.
Обычная ситуация, с которой можно встретиться после выполнения описанного выше вычисления функции коррекции тона, состоит в том, что фактическое используемое изображение не содержит участков воздушной среды и, возможно, не содержит также объектов, эквивалентных ступеням 1, 2, 3 и 4. Возможно, например, что большая часть зоны, «прозрачной для рентгеновского излучения» в исследуемом объекте (пациент 110 на фиг. 1А) достигает только уровня 2000 в динамическом диапазоне 0÷4095. В этом случае ток рентгеновской трубки может быть удвоен для увеличения ДНП, чтобы яркость зоны возросла и достигла уровня 4000.
При этом значение коррекции тона, первоначально рассчитанное на 4000, больше не подходит, поскольку ток 4000 генерируется после поглощения, эквивалентного уровню 2000 функции коррекции тона.
Чтобы справиться с этой ситуацией, если ток рентгеновской трубки удваивается так, что величина тока в мА становится равной 2×(мА-0), можно изменить единицы измерения на оси x графика функции коррекции тона на фиг. 21С, умножив значения на оси x на 2, чтобы получить модифицированную функцию коррекции тона, показанную на фиг. 21D. Динамический диапазон, используемый в функции коррекции тона на фиг. 21D, по-прежнему составляет 0÷4095 (значение 4095 показано пунктирной линией 2120 на фиг. 21D). В этом диапазоне фактические значения коррекции тона изменяются от 0,00 до приблизительно 0,71, а не до 1,00, как раньше.
Поэтому, когда ток рентгеновской трубки во время ее использования изменяется относительно тока рентгеновской трубки во время расчета функции коррекции тона, масштаб x («масштаб входных данных») функции коррекции тона можно отрегулировать, как описано выше, в тех же пропорциях, что и изменение тока в мА, а затем использовать для обеспечения требуемых коррекций тона при новом токе рентгеновской трубки.
Следует принимать во внимание, что регулирование масштаба точнее определяется изменением количества рентгеновских фотонов, испускаемых рентгеновской трубкой в направлении исследуемого объекта. Поскольку это количество обычно считают в достаточной мере пропорциональным изменению тока в мА, для этой цели, как правило, используется величина тока в мА.
Как объяснялось выше применительно к использованию функции коррекции тона, эту функцию можно использовать без первоначальной обработки фоновой области. В этом случае вычисление функции коррекции тона следует выполнять при одинаковых условиях, т.е. без первоначальной обработки данных, используемых для вычисления функции коррекции тона.
Вычисление функции коррекции фонового изображения с использованием тела пациента
В другом примере настоящего изобретения вычисление функции коррекции тона может быть основано на данных пациента в реальном времени (вместо описанного выше фантома), после чего функцию оптимизируют для конкретного пациента. Для описания этого примера обратимся к фиг. 22А - ФИГ. 22В. На чертежах представлен слой отображения, но это сделано только для удобства. Обсуждение со ссылкой на эти чертежи относится также к обработке изображений и слоям данных в памяти изображений, обрабатываемых, как правило, в 12-битовой системе, а также к распределению рентгеновского излучения и слоям детекторов (плоского детектора усилителя изображения или любого теоретического рентгеновского детектора), причем геометрические характеристики, относящиеся к этим слоям, полностью аналогичны описанным со ссылкой на фиг. 22А - ФИГ. 22В и соответствующую блок-схему на фиг. 33В.
В данном примере используются те же параметры, которые были выбраны для описания приведенных выше примеров, и, в частности: вычисление функции коррекции тона выполняется для конкретных значений ПАН и тока в мА, фоновое излучение рассчитано на 10% излучения ОИ, когда отсутствуют пациент или фантом, обозначенные позицией 110 на фиг. 1А, и т.д. Отклонения, важные для объяснения этого примера, будут представлены в явном виде. В следующем описании принято также некоторое упрощение коллиматора на фиг. 18А, согласно которому ширина кольца 1804 равна нулю, при этом рассматриваются только центральное отверстие 1802 и кольцо 1806. Распространение на случай кольца 1804 полностью аналогично другим вариантам распространения, описанным выше.
Обратимся теперь к фиг. 22А. В момент времени, представленный на фиг. 22А, оператор смотрит на точку 2202. ОИ 2204 задана, как описано выше, вокруг точки взгляда 2202 (шаг 3330). Излучение высокого уровня направлено теперь на ОИ 2204, в то время как фоновая область 2206 подвергается воздействию 1/10 излучения ОИ. Данные в основном потоке обрабатываются, как описано выше (как правило, выполняется первоначальная обработка путем добавления кадров, в некоторых случаях, регулирование яркости с использованием коэффициента умножения, а также вторая обработка с использованием сохраняемой функции коррекции тона. Могут также применяться другие процессы улучшения качества изображения, например, пространственные фильтры).
В фоновом потоке данных выполняется вычисление кривой коррекции тона на основе данных, полученных от изображения пациента 110.
Как следует из фиг. 22А, получают 2 типа данных:
1. Получают и сохраняют данные изображений в ОИ 2202 (шаг 3335) (предпочтительно в 12-битовом формате, но можно использовать и другую степень точности, например, 8-битовый формат) для спектра рентгеновского излучения, не отфильтрованного кольцом 1806 на фиг. 18А.
2. Получают и сохраняют данные изображений в фоновой области 2206 (шаг 3340) (предпочтительно в 12-битовом формате, но можно использовать и другую степень точности, например, 8-битовый формат) для спектра рентгеновского излучения, отфильтрованного кольцом 1806 на фиг. 18А.
Затем, спустя некоторое время, взгляд оператора перемещается к точке 2208 на фиг. 22В. ОИ следует за точкой взгляда и показана теперь как ОИ 2210 (шаг 3345).
Как следует из фиг. 22В, получают 2 типа данных:
3. Получают и сохраняют данные изображений в ОИ 2210 (шаг 3350) (предпочтительно в 12-битовом формате, но можно использовать и другую степень точности, например, 8-битовый формат) для спектра рентгеновского излучения, не отфильтрованного кольцом 1806 на фиг. 18А.
4. Получают и сохраняют данные изображений в фоновой области 2206 (которая теперь включает в себя также зону 2214, бывшую ранее ОИ 2204) (шаг 3360) (предпочтительно в 12-битовом формате, но можно использовать и другую степень точности, например, 8-битовый формат) для спектра рентгеновского излучения, отфильтрованного кольцом 1806 на фиг. 18А.
С помощью этих собранных данных можно вычислить функцию коррекции тона.
При одном подходе для каждого из кадров выполняют первоначальную обработку (суммирование кадров и настройку яркости). Другой подход, предусматривающий вычисление функции коррекции тона без первоначальной обработки, здесь не рассматривается, так как он уже подробно объяснялся в приведенных выше примерах.
На этом этапе, используя первоначально обработанные данные, значения пикселей (части или всех) из ОИ 2204 делят на значения соответствующих пикселей из фоновой области 2214 (шаг 3370) с целью получения коэффициента коррекции фоновых пикселей для коррекции тона (выход) на фиг. 21С для соответствующих значений фоновых пикселей (вход) в зоне 2214 на фиг. 22В.
Кроме того, используя первоначально обработанные данные, значения пикселей (части или всех) из ОИ 2210 делят на значения соответствующих пикселей из соответствующей фоновой зоны 2206 данных, полученных на этапе фиг. 22А с целью получения коэффициента коррекции фоновых пикселей для коррекции тона на фиг. 21С для соответствующих значений фоновых пикселей в зоне 2206 на фиг. 22А.
Это обеспечивает получение набора множественных входных точек, имеющих соответствующий вычисленный коэффициент коррекции фоновых пикселей. Вследствие шума этот набор, как правило, содержит также входные данные одинаковой величины, которым соответствуют различные выходные значения. Проблему этого статистического распределения выходных значений можно решить любым способом, включая усреднение выходных значений, метод медиан или другой способ. В данном примере принят метод усреднения. При таком подходе множество входных значений возможных различных выходных значений сводится к единственному входному значению с единственным выходным значением.
Имея этот набор точек, можно выполнить подбор кривой в соответствии с этим набором (предпочтительно включая также точку (0,0)) для вычисления функции коррекции тона на основе реальных данных пациента (шаг 3380).
Следует принимать во внимание, что для этой цели можно также использовать только одно положение ОИ и больше 2 положений ОИ, как продемонстрировано в вышеприведенном примере.
Следует также принимать во внимание, что, чем больше различных положений ОИ используется, тем больше вероятность получения большего количества точек в наборе для подбора кривой и, тем самым, более точной функции коррекции тона.
Следует также принимать во внимание, что при вычислениях можно использовать большее количество данных в целях повышения точности. Так, если пример основан на 10 к/с и ОИ находится в положении, показанном на фиг. 22А, дольше 5 секунд, данные ОИ и фоновой области можно собрать со всех кадров, сделанных в течение последних 5 секунд перед перемещением точки взгляда в положение, показанное на фиг. 22В. Таким же образом, если ОИ находится в положении, показанном на фиг. 22В, дольше 3 секунд, данные ОИ и фоновой области можно собрать со всех кадров, сделанных в течение первых 3 секунд после перемещения точки взгляда в положение, показанное на фиг. 22В.
Каждая единица таких данных может временно усредняться, тем самым уменьшая ошибки, вызванные шумами, и обеспечивая более точные значения для подбора кривой функции коррекции тона.
Следует также принимать во внимание, что такое вычисление функции коррекции тона может быть выполнено во время клинической процедуры с участием пациента, где первое вычисление выполняется непосредственно после первого перемещения ОИ из одного местоположения в другое, причем функцию коррекции тона можно пересчитывать с любым временным интервалом, используя дополнительно накопленные данные.
В начале этого процесса можно использовать функцию коррекции тона, принятую по умолчанию, заменить ее первой вычисленной функцией коррекции тона сразу же после ее вычисления и в дальнейшем заменять каждую функцию коррекции тона последовательно вычисляемыми функциями коррекции тона, улучшенными благодаря использованию дополнительных данных.
Следует принимать во внимание, что данные для вычисления коррекции тона, собранные у нескольких пациентов, можно применять для формирования одной или нескольких функций коррекции тона «обобщенного пациента», которые могут использоваться для будущих пациентов.
Такие данные можно улучшать с каждым следующим пациентом, данные которого добавляют к уже сохраненным данным и обрабатывают вместе.
Как объяснялось выше применительно к использованию функции коррекции тона, эту функцию можно использовать без первоначальной обработки фоновой области. В этом случае вычисление функции коррекции тона следует выполнять при одинаковых условиях, т.е. без первоначальной обработки данных, используемых для вычисления функции коррекции тона.
Как было показано выше в качестве примера, можно разделить кольцевую зону 1824 на фиг. 18 на 8 колец с равным шагом по радиусу так, чтобы средняя ДНП в наименьшем кольце №1 составляла 9/10 ДНП в зоне 1822, средняя ДНП в следующем кольце №2 составляла 8/10 ДНП в зоне 1822, в кольце №3 - 7/10 и т.д., до последнего кольца №8, в котором ДНП равно 2/10 ДНП в зоне 1822. В этом примере предполагается, что каждое кольцо, имеющее определенный внутренний и внешний радиус, обеспечивает ДНП, независимую от угла 1828 на фиг. 18А.
Этот способ работает с достаточной точностью, когда источник рентгеновского излучения расположен по центру апертуры, как показано на фиг. 23А. На фиг. 23А пунктирная линия 2302 отмечает средний слой коллиматора 1800 (толщина слоя половинного ослабления). Рентгеновские лучи (лучи) 2304 и 2306 пересекают верхнюю поверхность кольцевой зоны 1804 в той же точке, где линия 2302 пересекает верхнюю поверхность кольцевой зоны 1804. Это показывает, что лучи проходят через коллиматор при одном и том же радиусе, но под разными углами. Поскольку источник рентгеновского излучения расположен по центру апертуры 1802 и кольцевой зоны 1804, такая симметрия приводит к тому, что на пути каждого из лучей 2304 и 2306 находится одинаковый материал коллиматора 1800. Поэтому затухание (ослабление) оказывается одним и тем же и не зависит от угла 1828 на фиг. 18А.
На фиг. 23В представлена ситуация, когда коллиматор 1800 сдвинут вправо. Луч 2308, представляющий собой аналог луча 2304, и луч 2310, представляющий собой аналог луча 2306, хотя и проходят через коллиматор 1800 с одинаковым радиусом, не обладают одинаковым углом падения на поверхность коллиматора. Лучи 2308 и 2310 проходят разный путь внутри коллиматора, поэтому их затухание различно. Чтобы устранить последствия этого явления, его учитывают и вводят в вычисления ДНП.
При одном подходе выполняют коррекцию ДНП в качестве параметра положения коллиматора 1800. Ее можно осуществить, используя коэффициент поглощения рентгеновского излучения материалом коллиматора и геометрию коллиматора. Поскольку расстояние от источника 306 до коллиматора 1800 также влияет на ДНП как функцию положения коллиматора, это расстояние также можно учесть в вычислениях с целью дополнительного повышения точности.
В качестве альтернативы вычислению ДНП, ДНП можно измерять для различных положений коллиматора 1800 и использовать в качестве данных о затухании. Точность также можно дополнительно повысить, измеряя ДНП как функцию расстояния от источника 306 до коллиматора 1800.
Уменьшение чувствительности затухания к углу падения луча можно обеспечить за счет симметричного или почти симметричного края апертуры, как показано на фиг. 24А, позиционное обозначение 2312. При такой конструкции различие пути в материале коллиматора между лучом 2308 и лучом 2310 меньше, чем в случае края апертуры, показанного на фиг. 23А и фиг. 23В. Следует принимать во внимание, что для минимизации чувствительности затухания к углу падения луча можно оптимизировать конструкцию с каждой стороны края апертуры, не являющегося симметричным относительно линии 2302. Результатом такой оптимизации были бы две поверхности края апертуры (верхняя и нижняя поверхности кольцевой зоны 2312 на фиг. 24А и 24В), несимметричные относительно линии 2302.
Обратимся теперь к фиг. 25, изображающему модифицированный пример коллиматора 1800. Это обычный вариант для фильтрации рентгеновского излучения с использованием слоев, таких как слои алюминия (Al) различной толщины, для изменения спектрального распределения рентгеновского излучения. Такая фильтрация, как правило (но не ограничиваясь этим), уменьшает низкоэнергетическую часть рентгеновского спектра. Коллиматор на фиг. 18, при использовании большинства из применяемых материалов, выполнял бы то же самое. Далее, если коллиматор на фиг. 18 используется еще с одним слоем фильтра, этот другой слой фильтра, рассчитанный на то, чтобы полностью охватывать поперечный разрез рентгеновского луча, не только обеспечивает требуемые результаты в зоне апертуры 1802, но и добавляет этот эффект также к зоне 1806 за пределами апертуры сверх того воздействия, которое уже оказывает коллиматор. Это может быть нежелательным. Чтобы устранить этот недостаток, вместо использования фильтра, полностью охватывающего поперечный разрез рентгеновского луча, меньший фильтр 2500 добавляют только к зоне ОИ как часть коллиматора 1800. При этом фильтр оказывает требуемое воздействие в зоне 1802 апертуры, но не добавляет дополнительную нежелательную фильтрацию в зоне 1806.
Обратим теперь внимание на фиг. 26, представляющий пример системы для реализации настоящего изобретения.
Как правило, в рентгеновских системах ОИ, располагающаяся в центре изображения 120 (такая как ОИ 200 на фиг. 2) в фиксированном положении, используется для анализа изображений и генерации параметров для управления рентгеновской трубкой 100 и модификации изображения 120. Для этой зоны могут вычисляться такие параметры, как среднее значение, максимальное значение и контрастность. Эти параметры (такие как мА, мА-с и ПАН) обычно используются для оптимизации работы рентгеновской трубки.
В этом примере датчик 128 отслеживания движения глаза используется для обеспечения контроллера 130 рентгеновского излучения координатами взгляда пользователя 122. Вместо использования фиксированного положения ОИ как в известном уровне техники, ОИ перемещается в соответствии с координатами взгляда так, что включает в себя точку взгляда или находится рядом с ней. При такой регулировке положения ОИ как функции точки взгляда, анализ и параметры, вычисляемые по ОИ для управления рентгеновской трубкой и модификации изображения 120, выполняют и генерируют на основе ОИ, располагающейся в соответствии с точкой взгляда, вместо фиксированной ОИ, которая может иногда находиться на некотором расстоянии от точки взгляда и не предоставлять информацию об изображении, существенную для точки взгляда.
Например, центр изображения может включать в себя, главным образом, костные структуры (такие как позвоночник и грудина), образующие темный участок изображения, а периферийная часть изображения 120 включает в себя, главным образом, легкое, представляющее собой яркую часть изображения. При ОИ, фиксированной в центре, параметры рентгеновского изображения и характеристики изображения (такие как яркость, контрастность и тоновая коррекция) можно отрегулировать так, чтобы сделать четким центральное изображение. Такая регулировка направит избыточное рентгеновское излучение в зону легкого, находящуюся за пределами ОИ, и при этом может также увеличить яркость зоны легкого сверх приемлемого уровня качества изображения, в результате чего изображение легкого будет непригодным для использования. Когда пользователь посмотрит на легкое, качество изображения может оказаться непригодным для использования. В такие случаях пользователь может переместить пациента или раму С-типа в новое положение, чтобы изображение легкого вошло в центрированную ОИ с фиксированным положением. В текущем примере с перемещением ОИ как функции точки взгляда, когда пользователь смотрит на легкое в периферийной части изображения 120, ОИ также перемещается в зону легкого, при этом регулировка параметров рентгеновского излучения и изображения осуществляется в соответствии со смещенной ОИ согласно требованиям отображения легких. Как правило, в текущем примере при этом также уменьшается интенсивность рентгеновского излучения и снижается воздействие облучения на пациента в соответствии с точкой взгляда.
Следует также принимать во внимание наличие многих видов зависимости между точкой взгляда и ОИ. Такие зависимости могут включать в себя положение ОИ относительно точки взгляда, размер ОИ относительно точки взгляда, форму ОИ относительно точки взгляда (в прямоугольном изображении ОИ может быть круглой в центральной зоне и прямоугольной вблизи от углов изображения, или принимать любую другую форму, в том числу комбинацию дуги и прямых краев под углом 90 градусов). Кроме того, ОИ может быть центрировано относительно точки взгляда, но может иметь и другое местоположение относительно этой точки. Такое изменяемое местоположение может зависеть от любой комбинации местоположения точки взгляда, динамики точки взгляда и фиксированной или изменяемой формы ОИ. ОИ может быть зафиксировано в некотором положении и только изменять размер как функцию точки взгляда. Одним из таких примеров является круглая ОИ, центрированная относительно изображения 120, где диаметр ОИ изменяется в соответствии с точкой взгляда. В одном примере диаметр ОИ может увеличиваться при возрастании расстояния точки взгляда от центра изображения 120.
Следует принимать во внимание, что термин «датчик отслеживания движения глаза» используется в настоящем изобретении, чтобы указывать на любое устройство, способное обеспечивать информацию, относящуюся к точке взгляда пользователя.
В примере на фиг. 26 следует принимать во внимание, что изобретение не ограничивается датчиком отслеживания движения глаза, который, как правило, автоматически выдает информацию о точке взгляда пользователя. В примере настоящего изобретения датчик отслеживания движения глаза можно заменить любым устройством ввода, воздействующим на расположение и/или форму ОИ. Например, для определения координат относительно изображения 120 можно использовать джойстик, клавиатуру, интерактивный дисплей, такой как дисплей планшетного компьютера или смартфона, устройство считывания жестов, голосовой интерпретатор или любое другое подходящее устройство, при этом расположение и/или форма ОИ будут изменяться в соответствии с данными такого устройства ввода.
Изменения тона описаны выше с использованием терминов коррекции тона. Хотя во многих примерах используется термин «коррекция тона», это не ограничивает примеры смыслом понятия «коррекция», поэтому все эти примеры можно интерпретировать в смысле любых изменений изображения, в том числе таких, которые могут включать в себя любую требуемую модификацию изображения. Термин «коррекция тона» следует интерпретировать как изменение тона, которое может включать в себя любую требуемую модификацию изображения.
Специалистам в данной области техники следует принимать во внимание, что описанные выше способы и технологии не ограничены конфигурациями и способами, приведенными выше в настоящей заявке в качестве примеров. Помимо этих примеров, другие конфигурации и способы также могут использоваться для оптимизации конечного результата в зависимости от конкретной конструкции и набора технологий, реализованных при ее изготовлении.
Раскрытые выше варианты осуществления даны лишь в качестве примера и не ограничивают объем настоящего изобретения.
Объем настоящего изобретения определяется исключительно формулой изобретения, приведенной ниже.
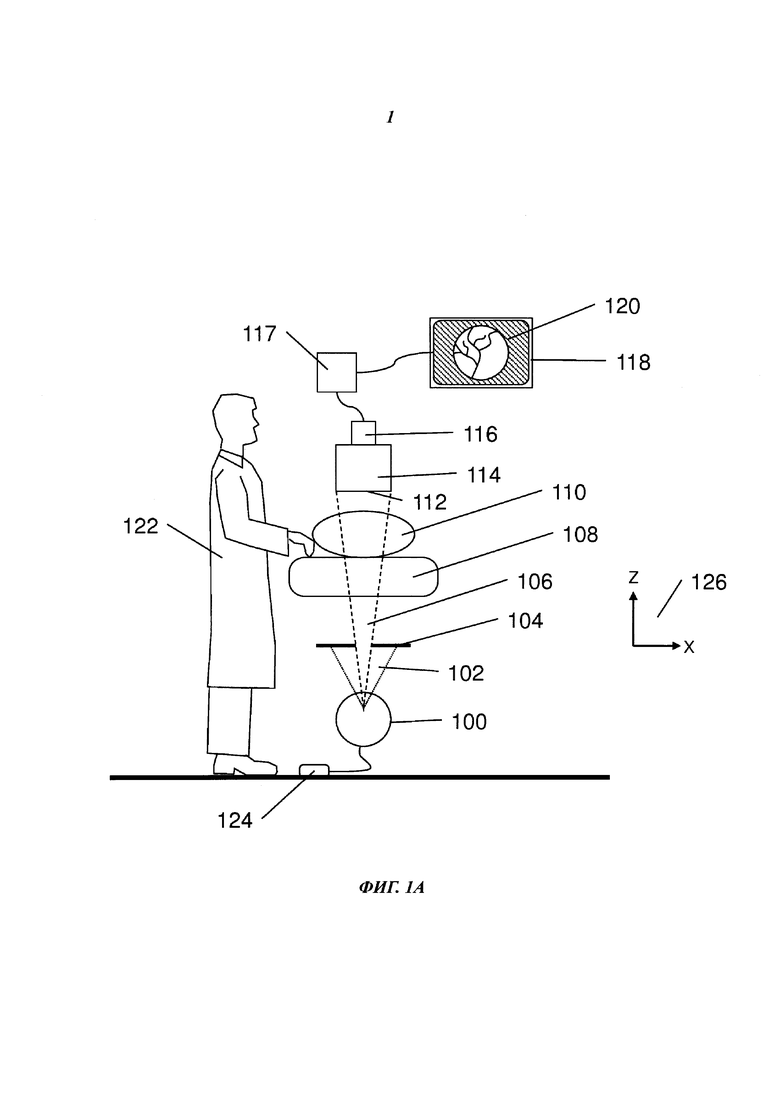
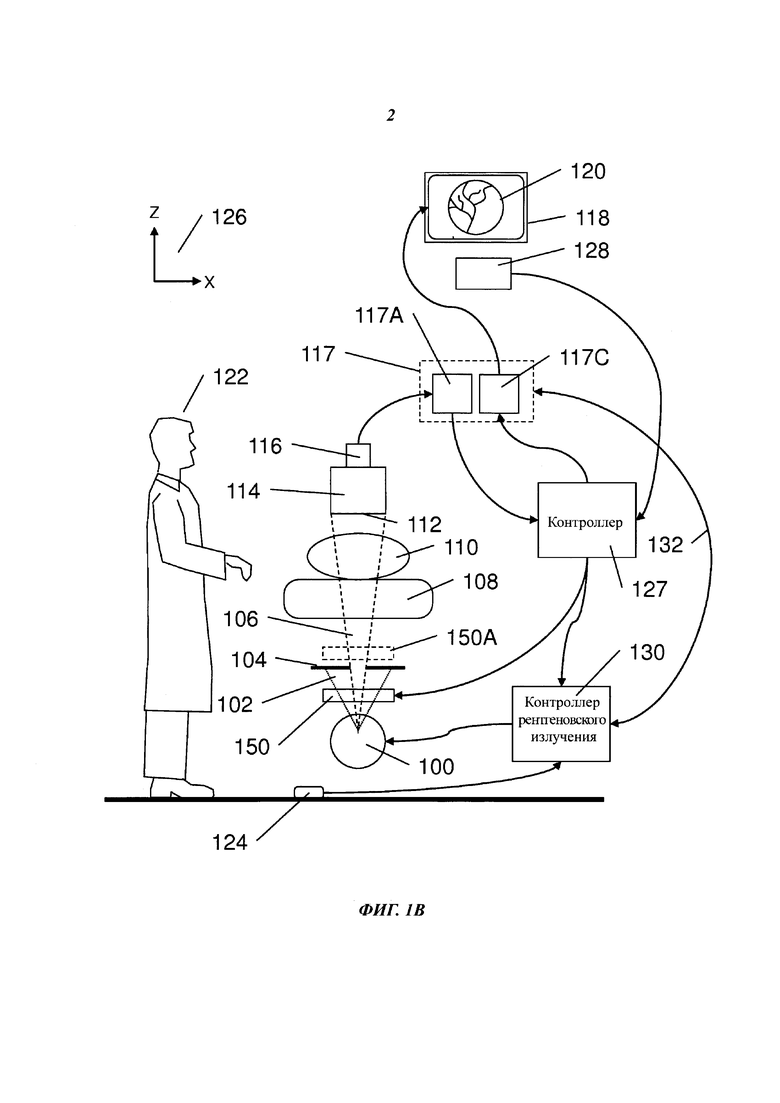
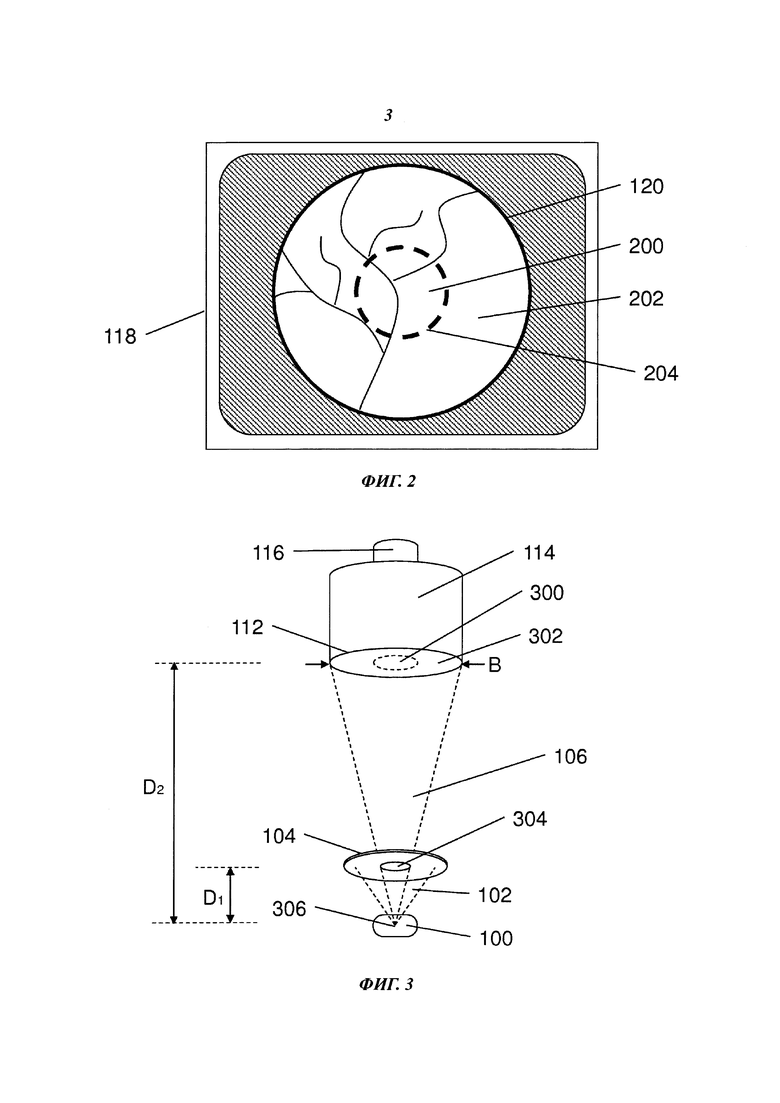
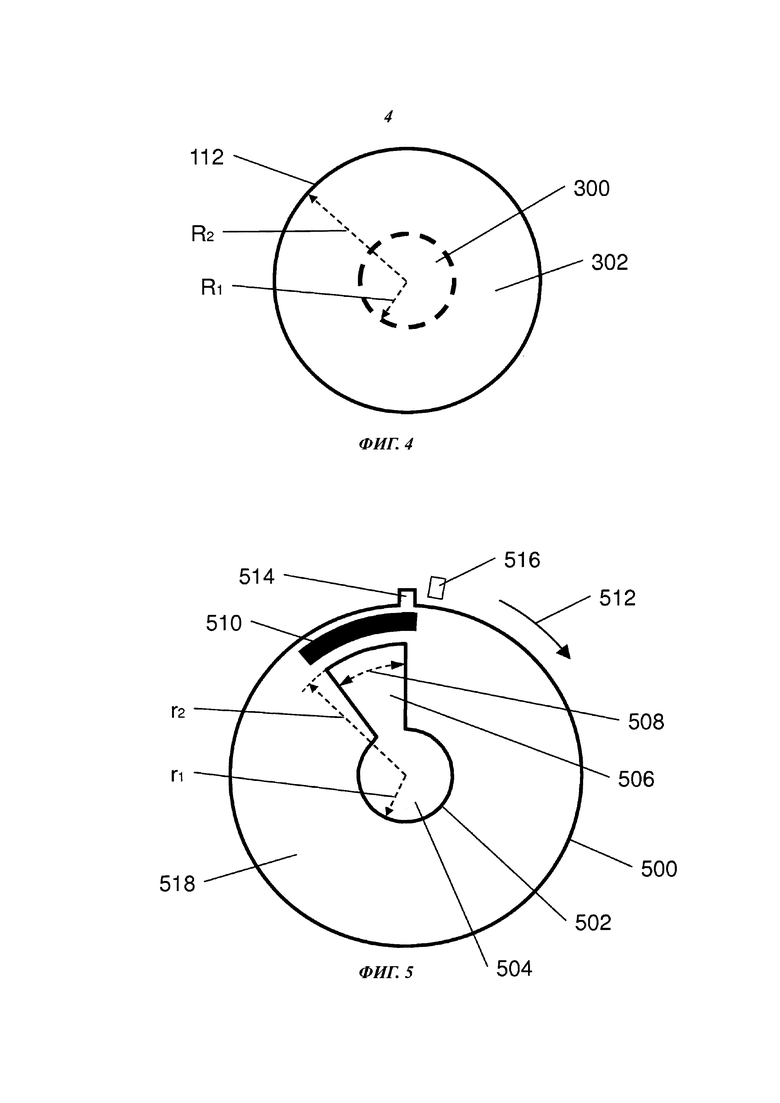
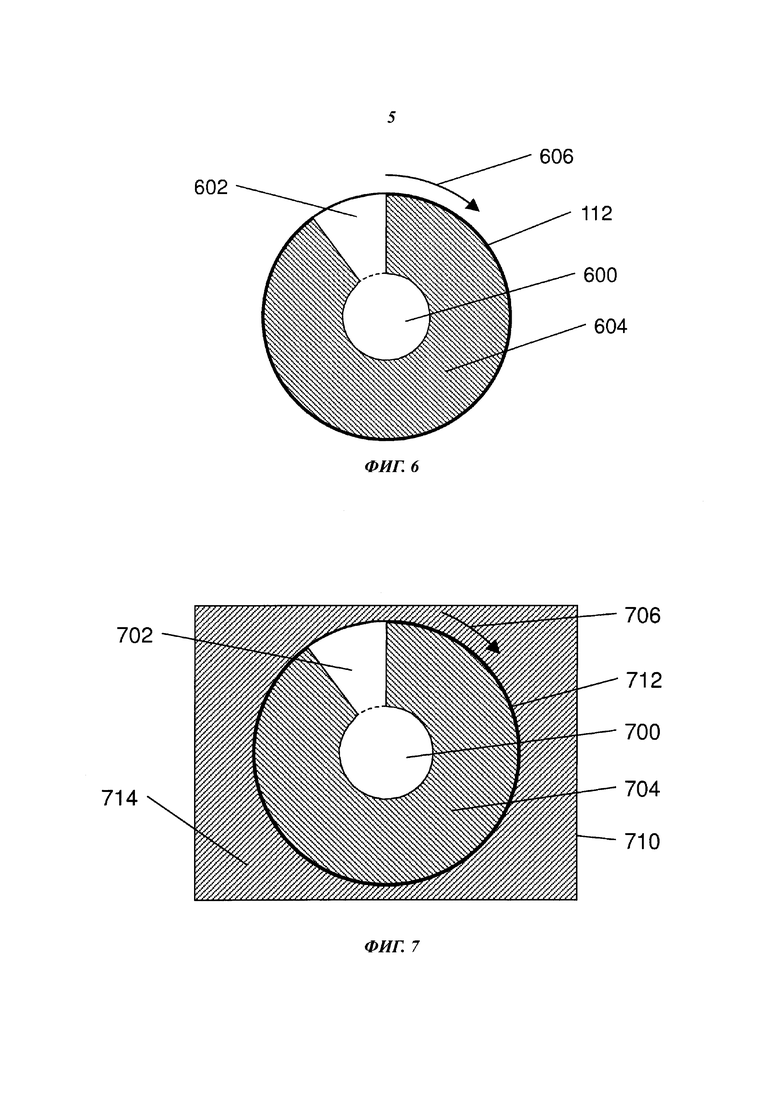
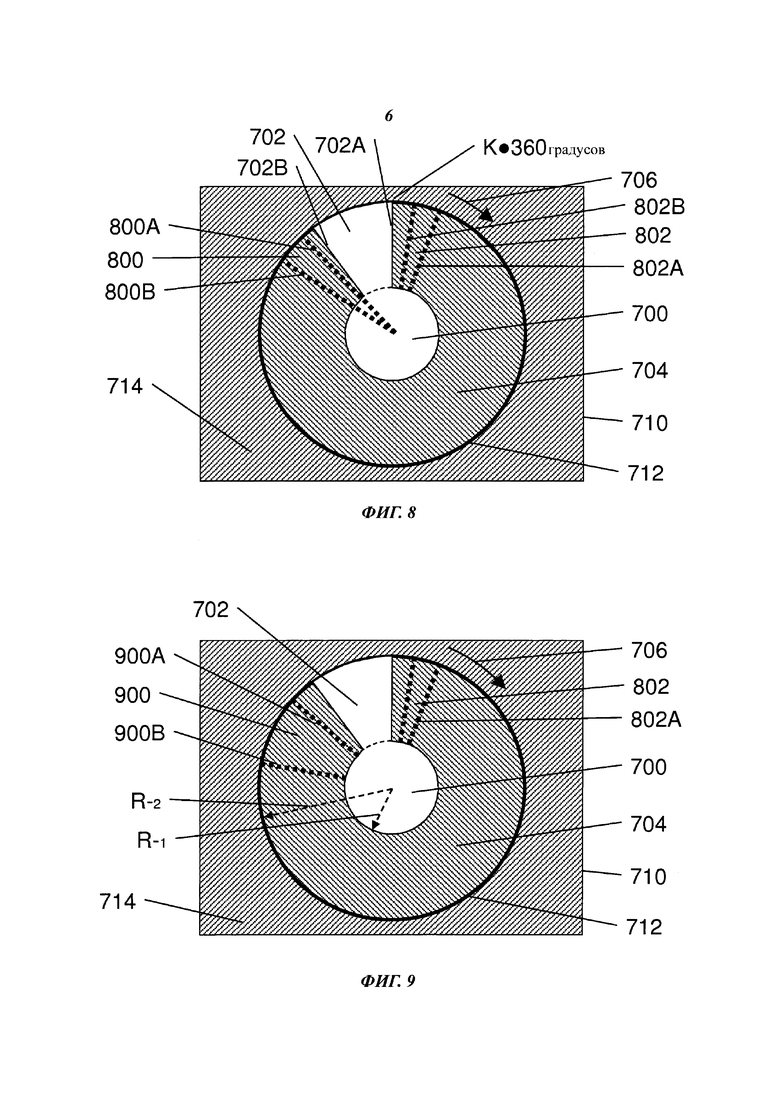
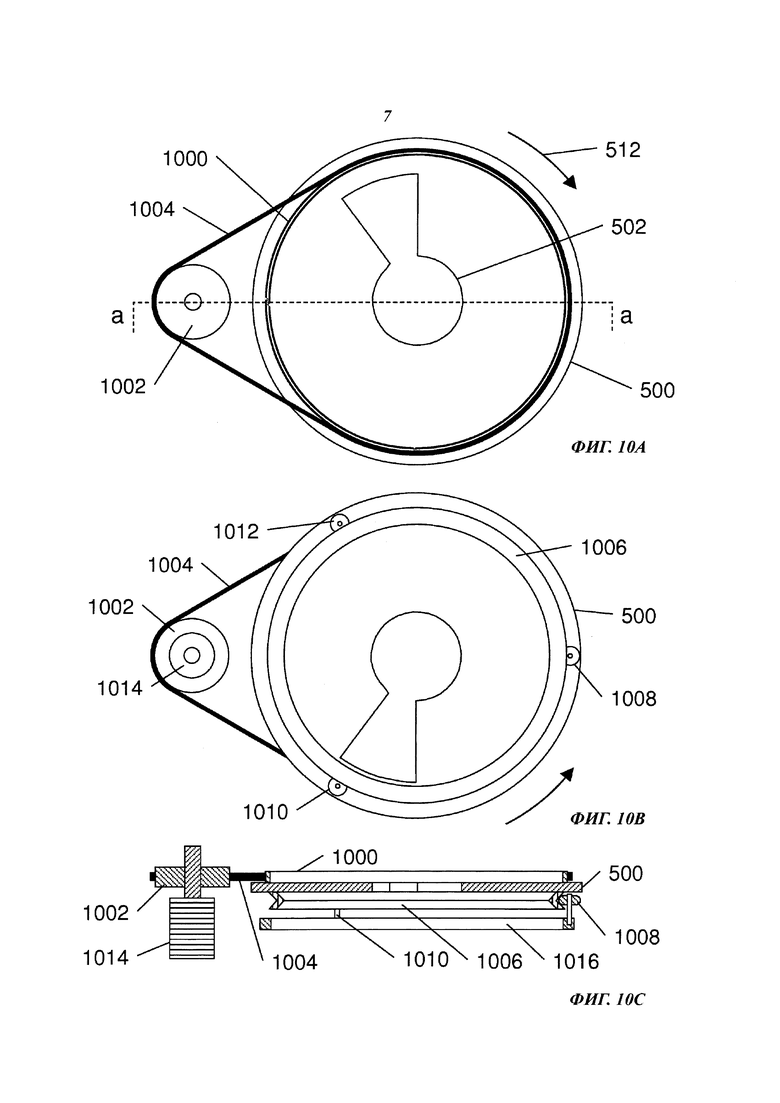
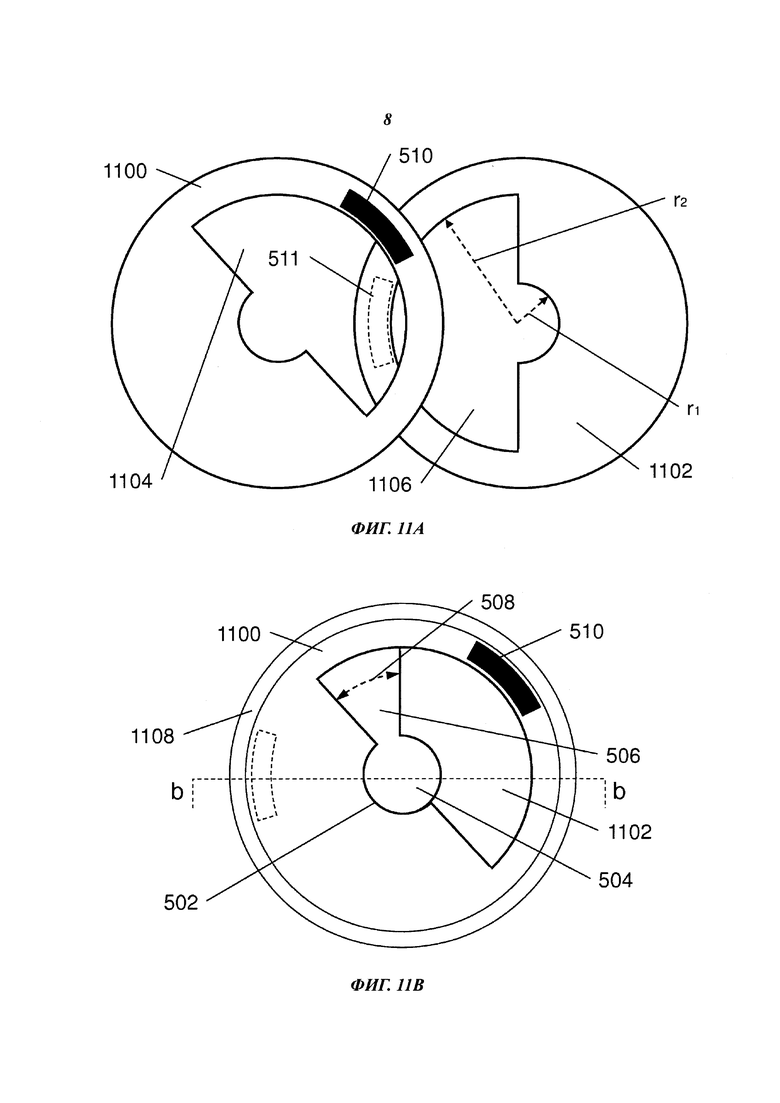
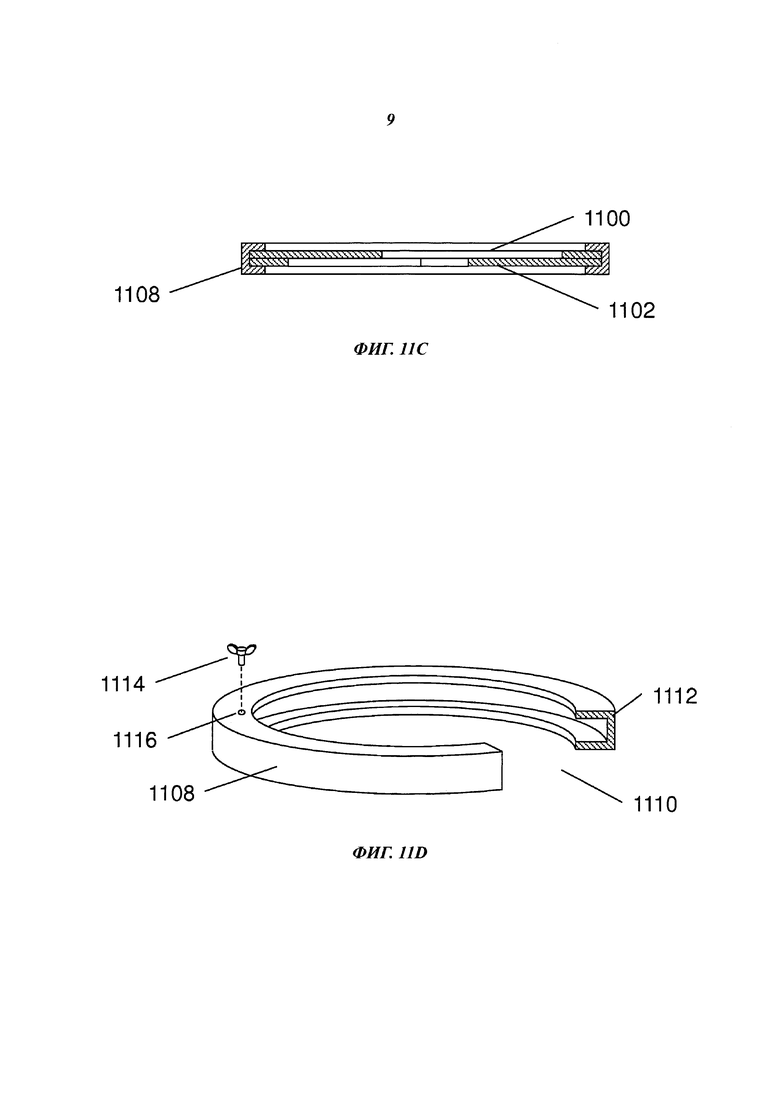
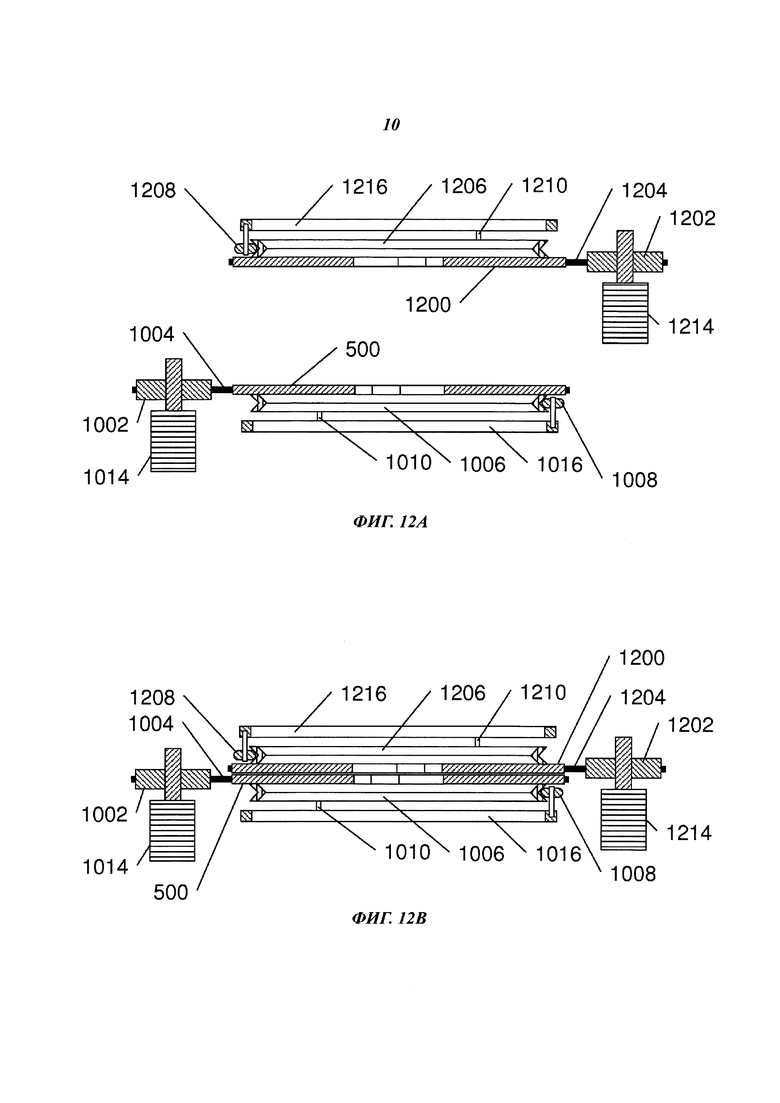
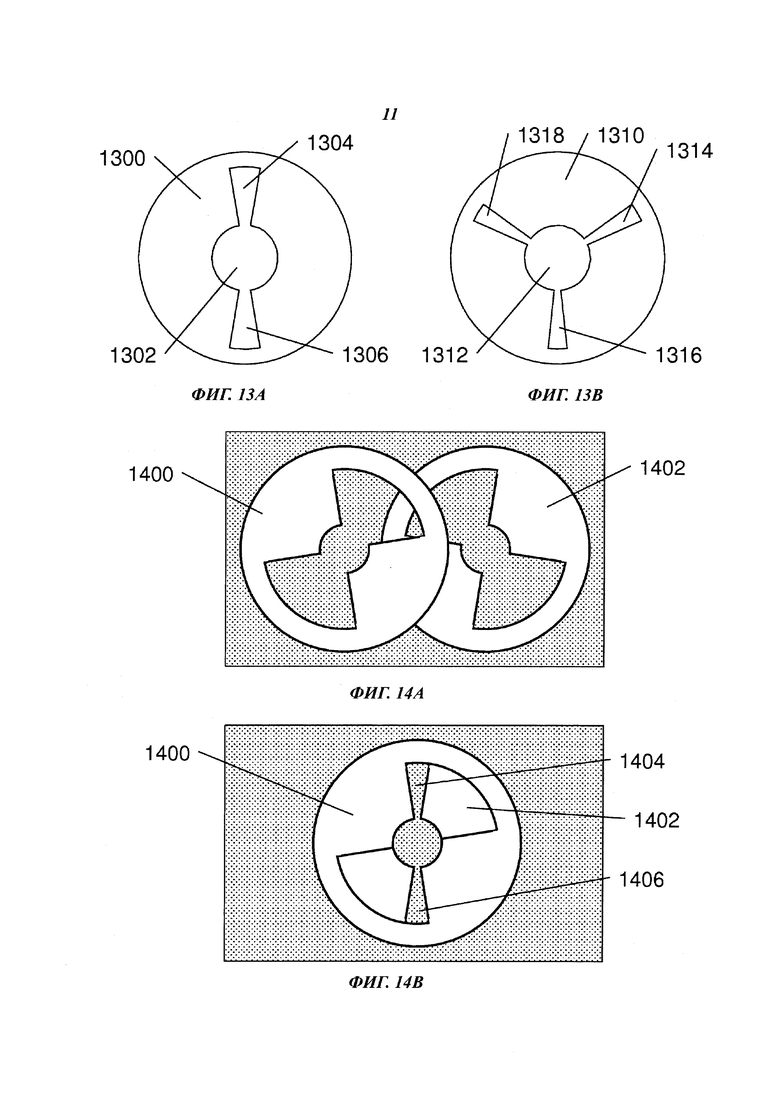
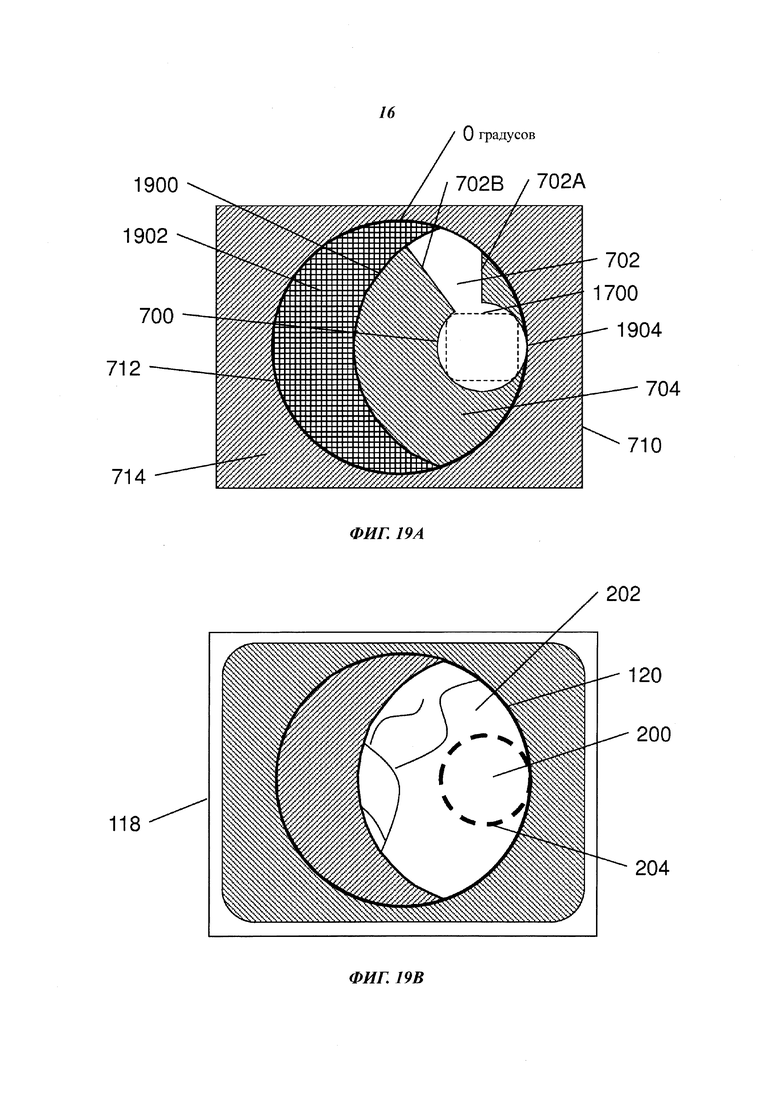
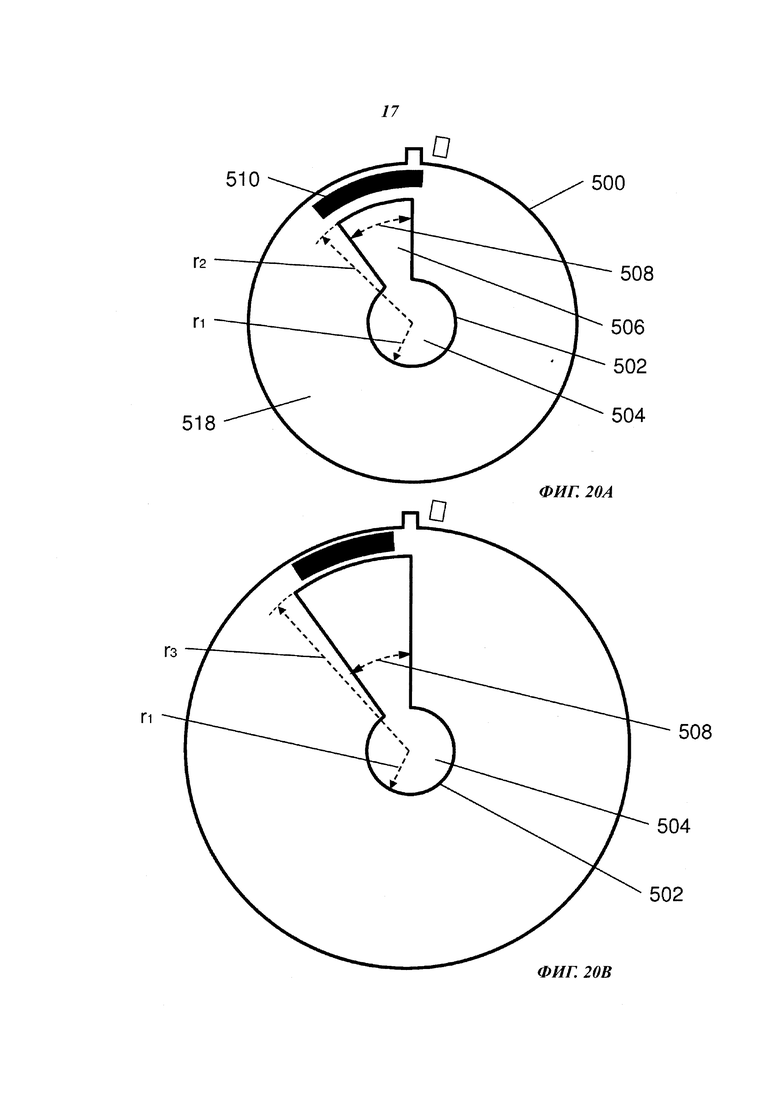
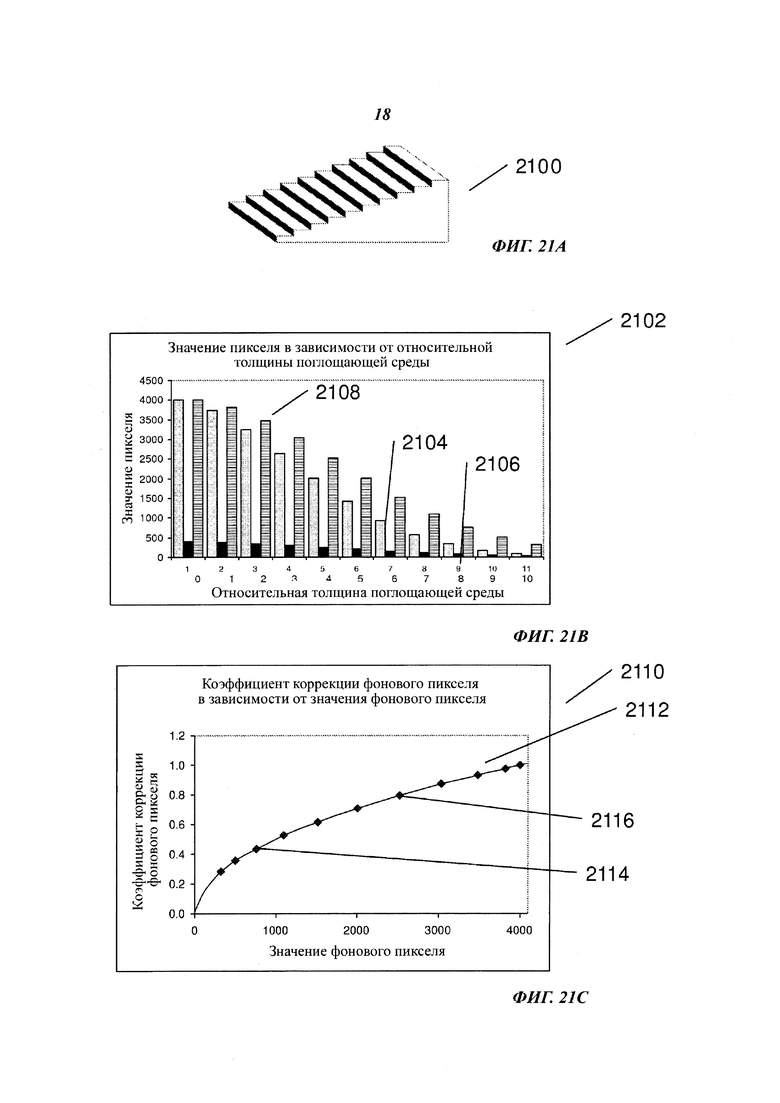
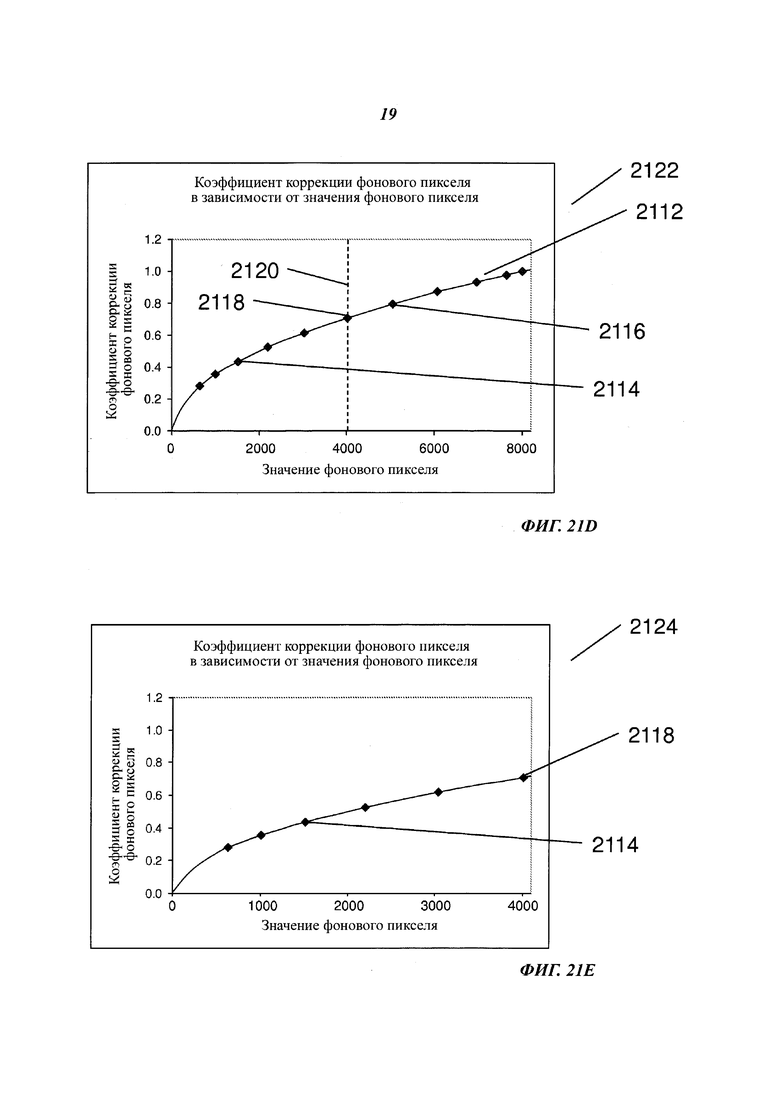
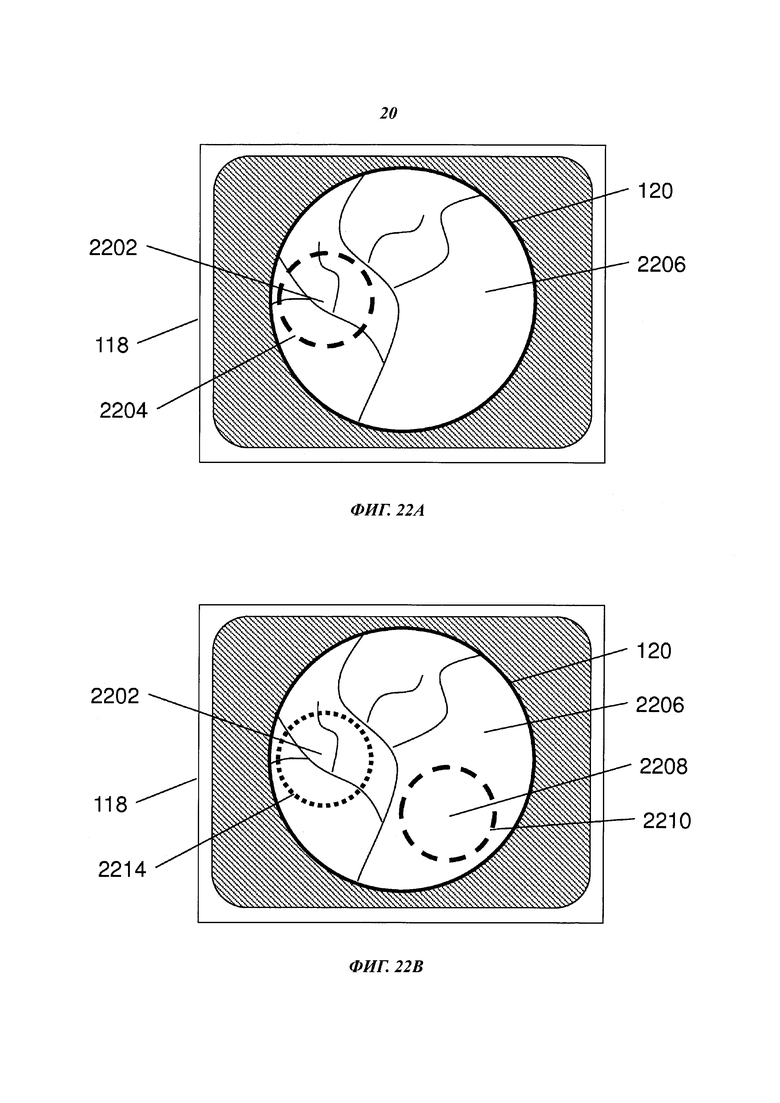
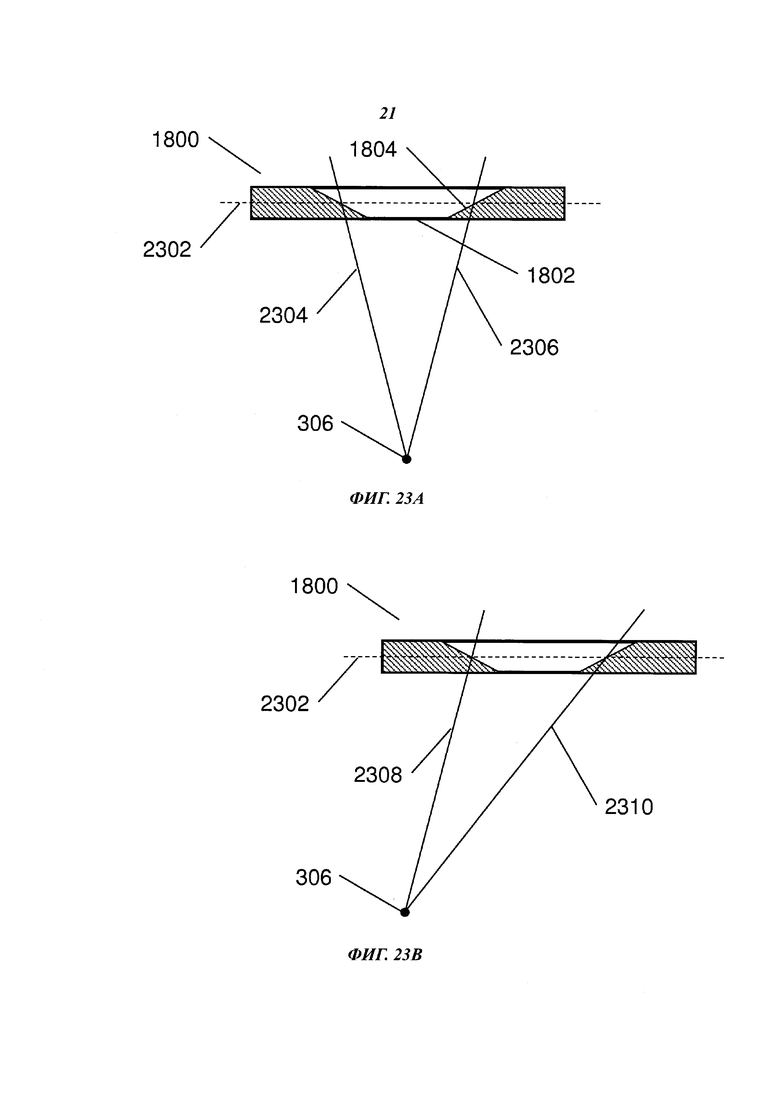
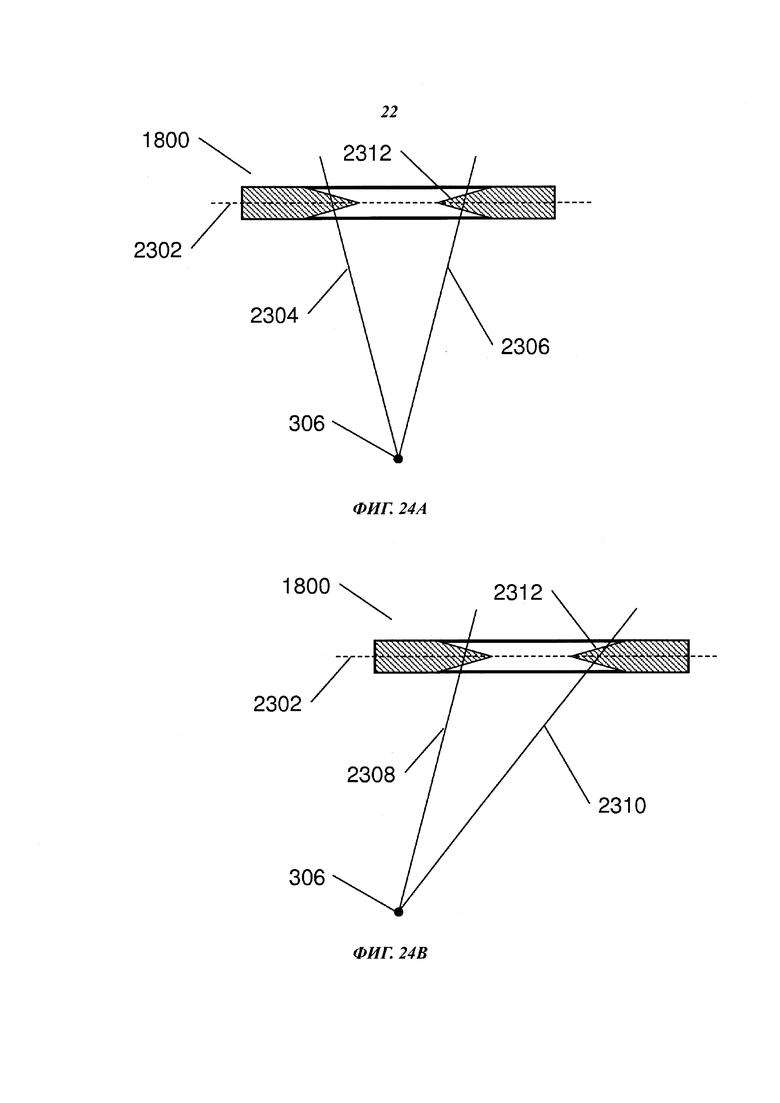
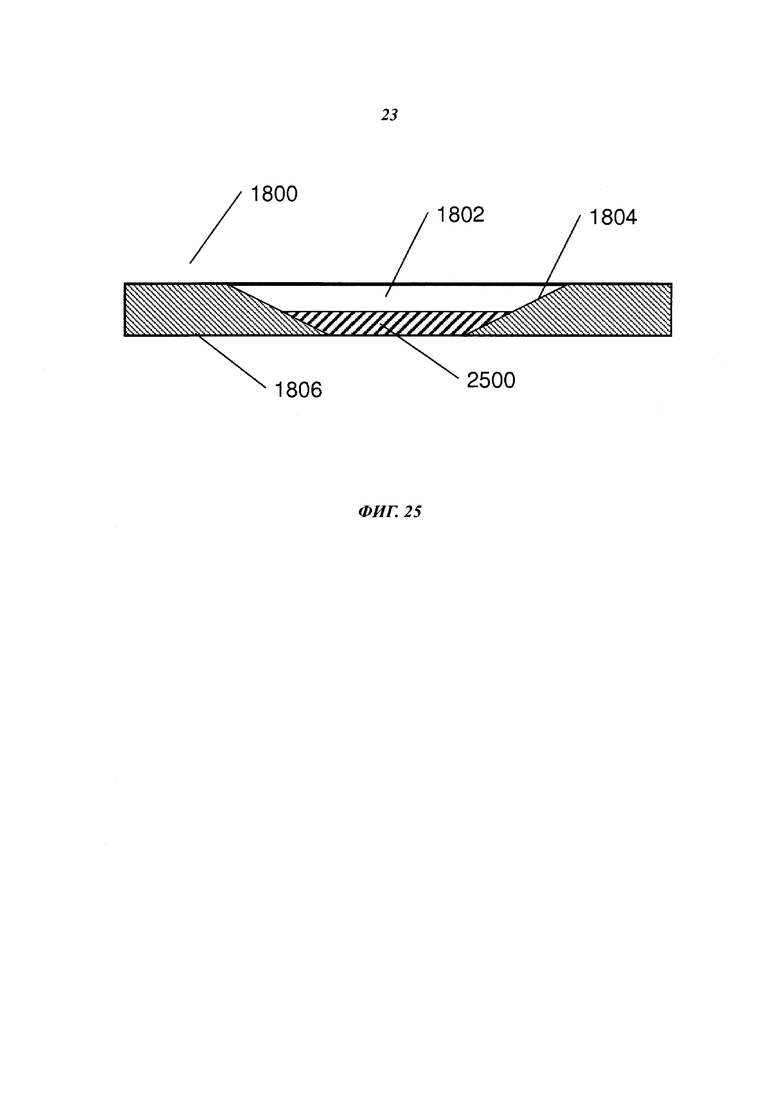
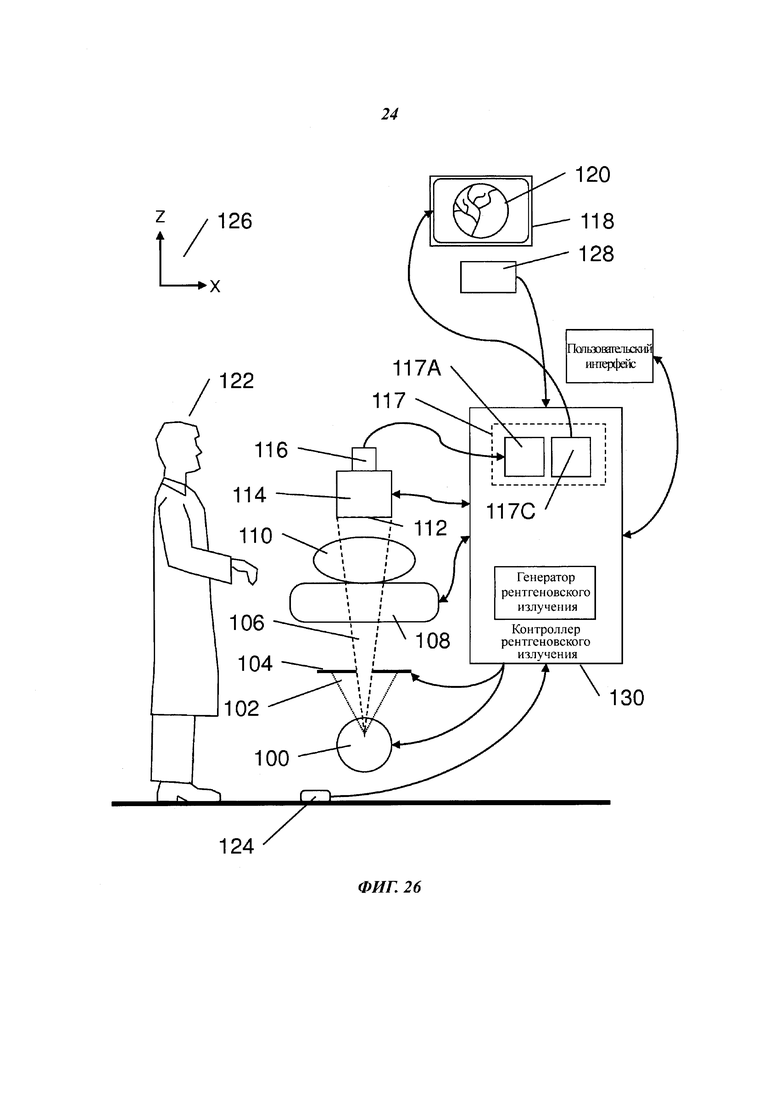
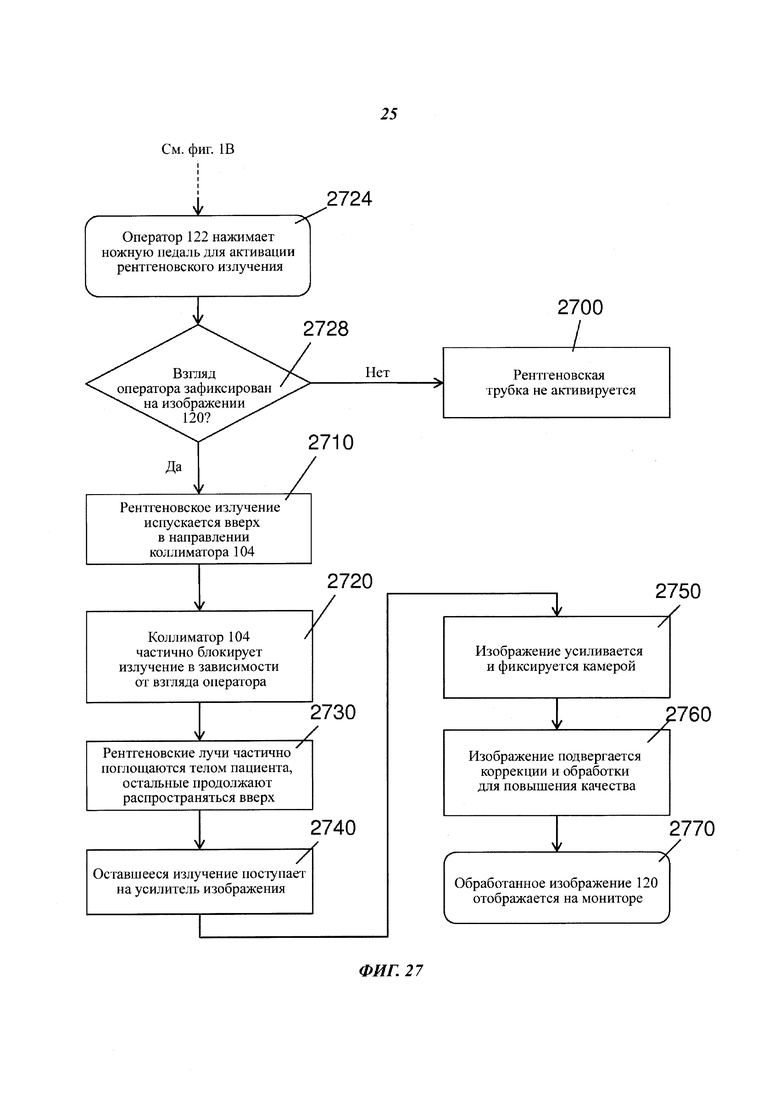
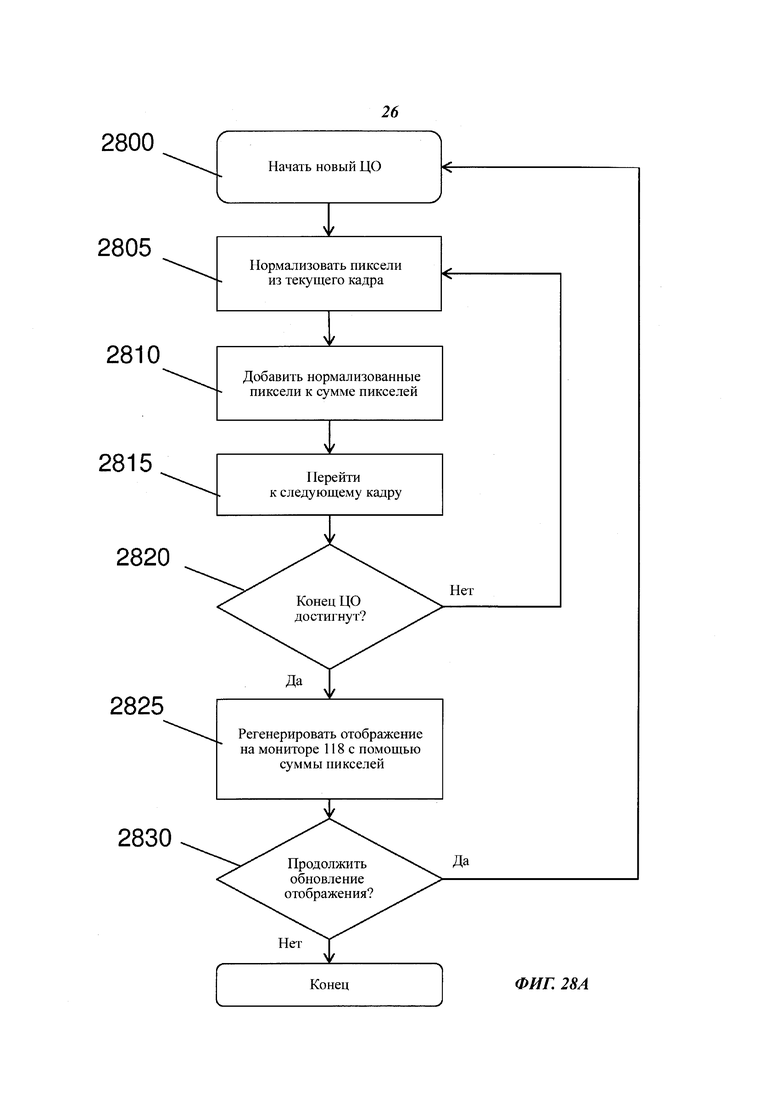
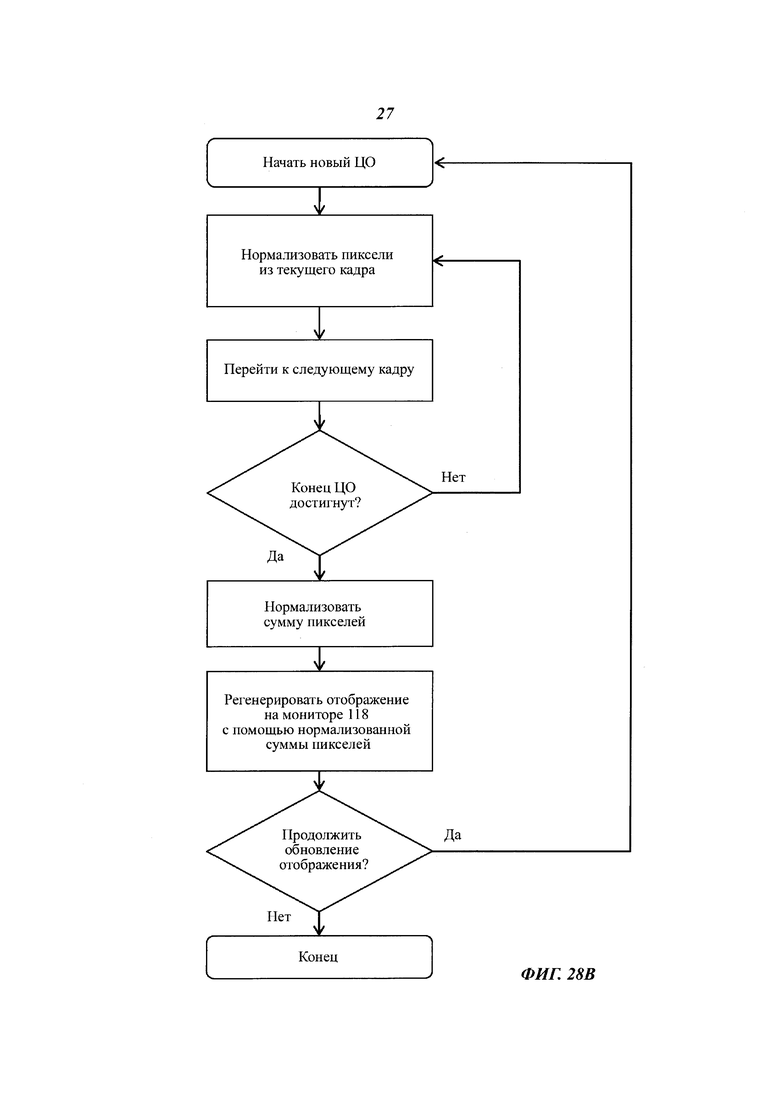
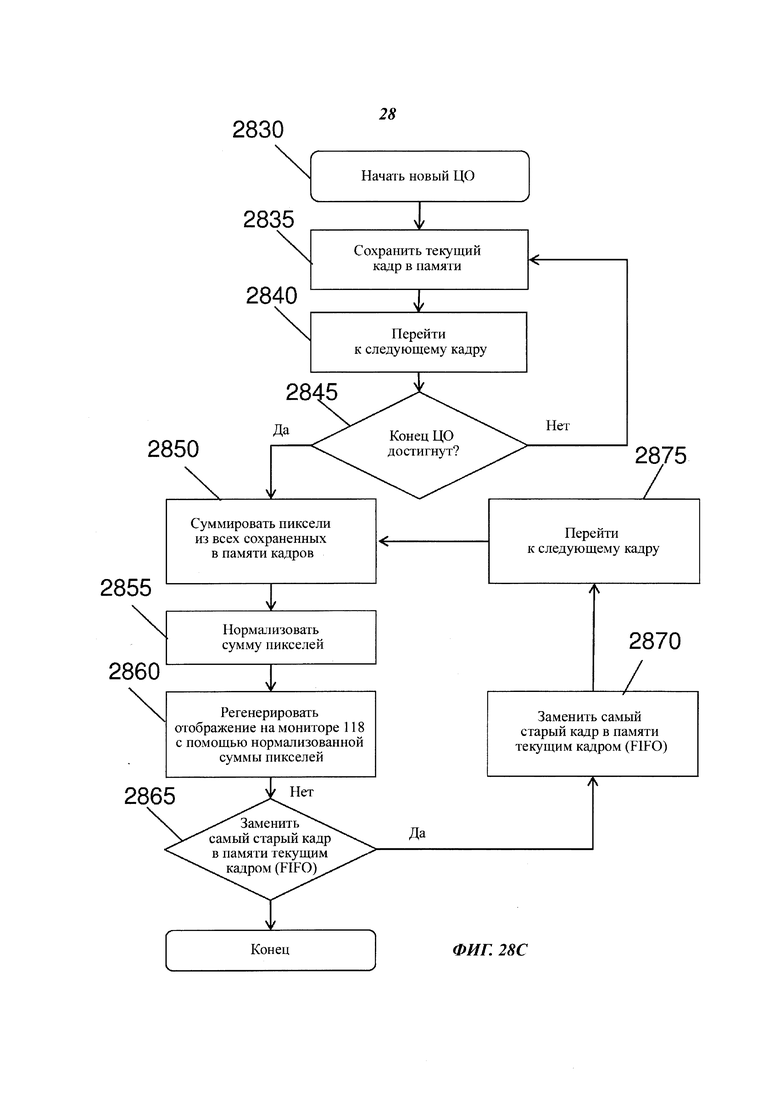
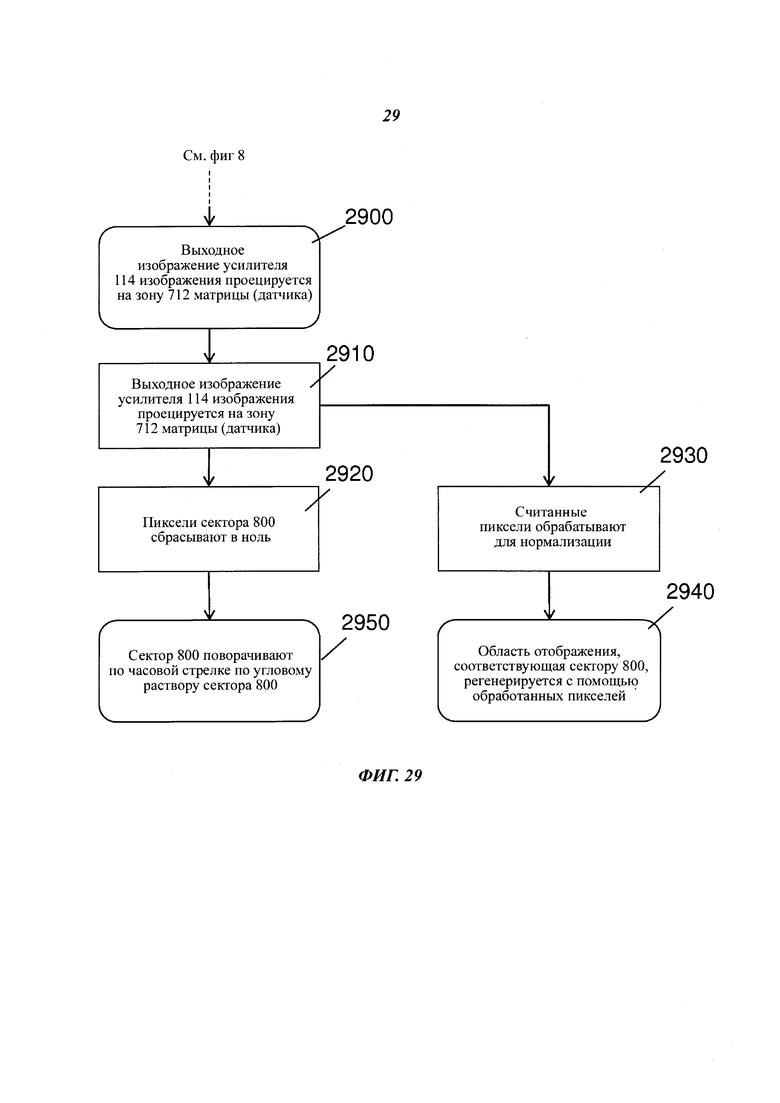
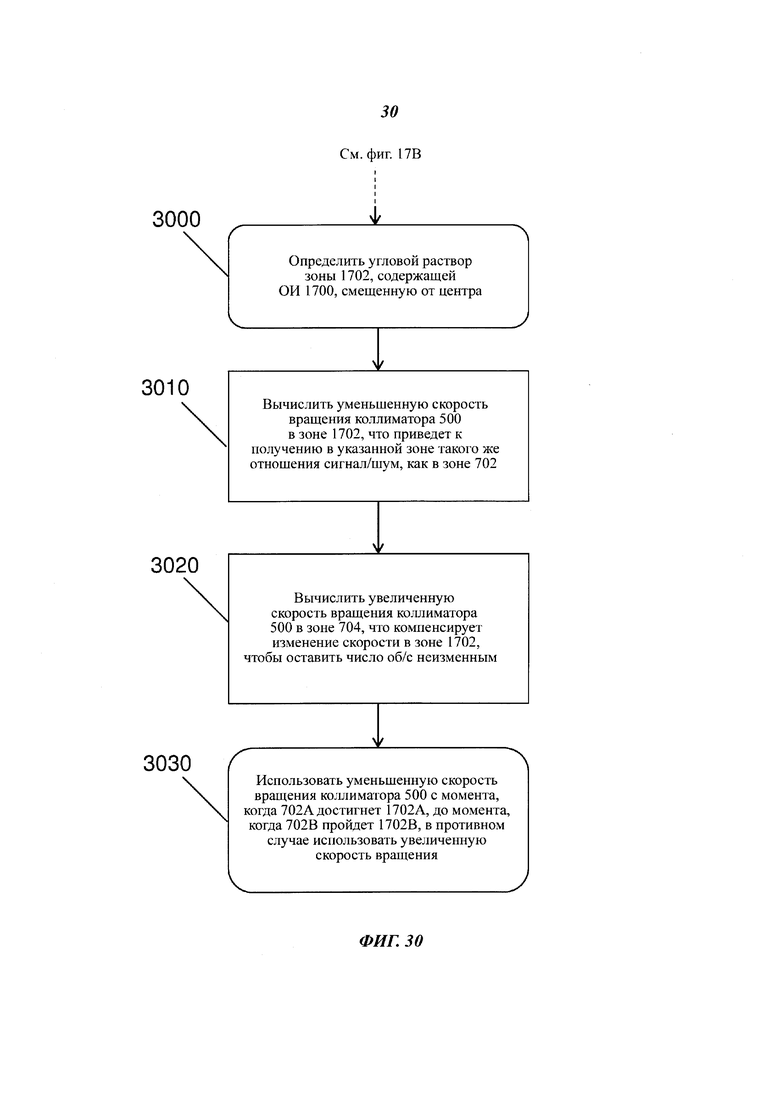
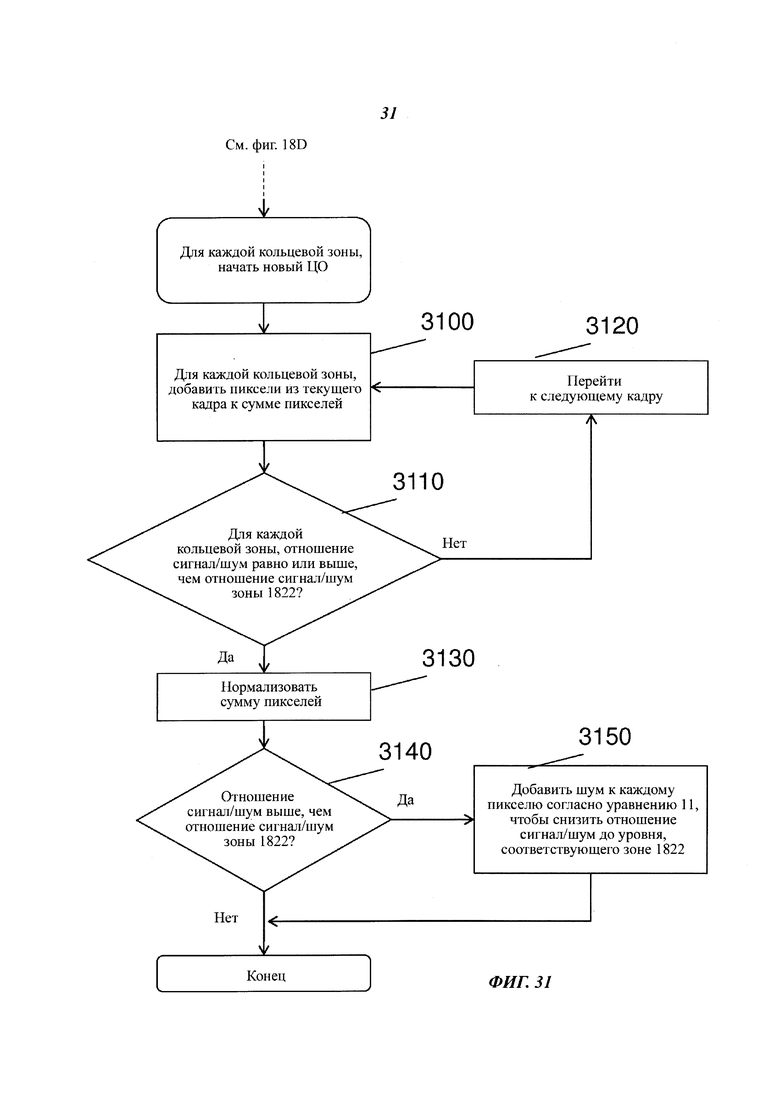
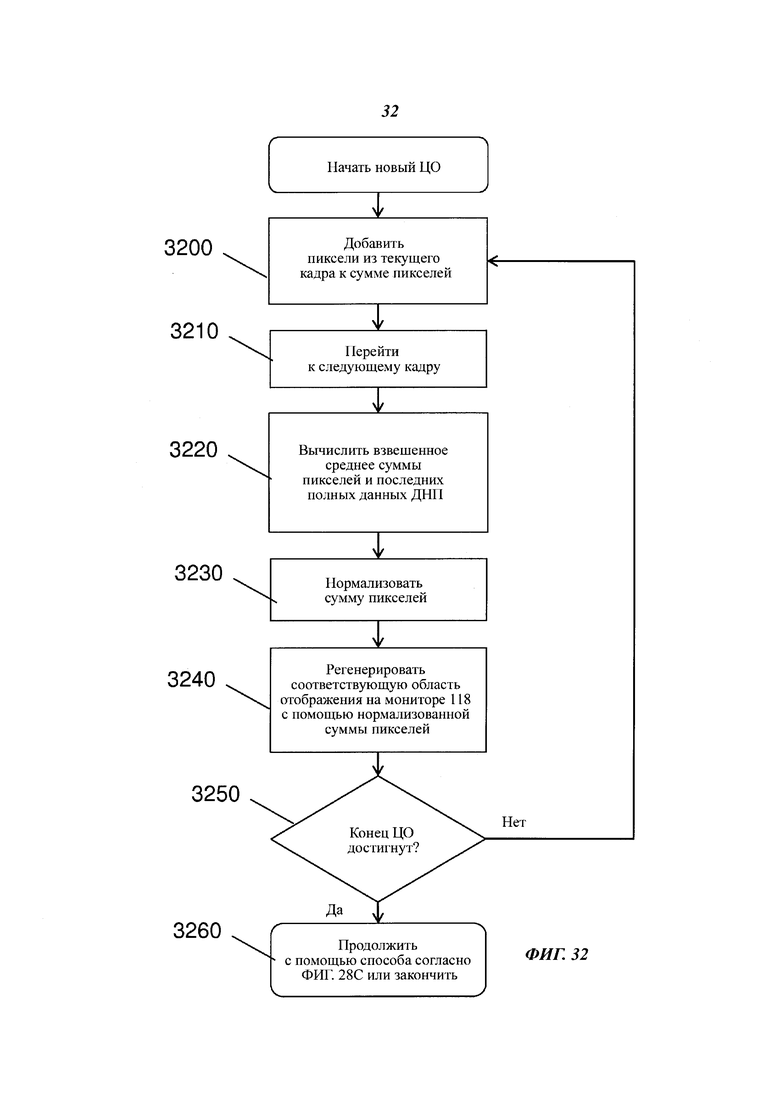
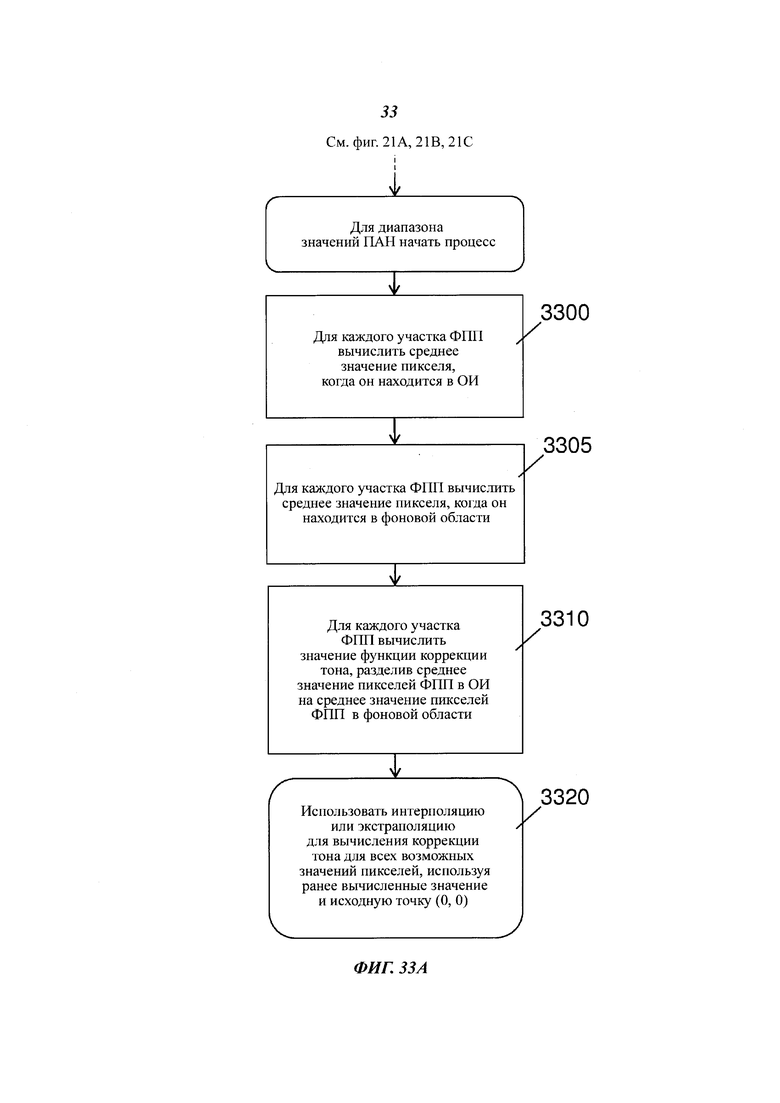
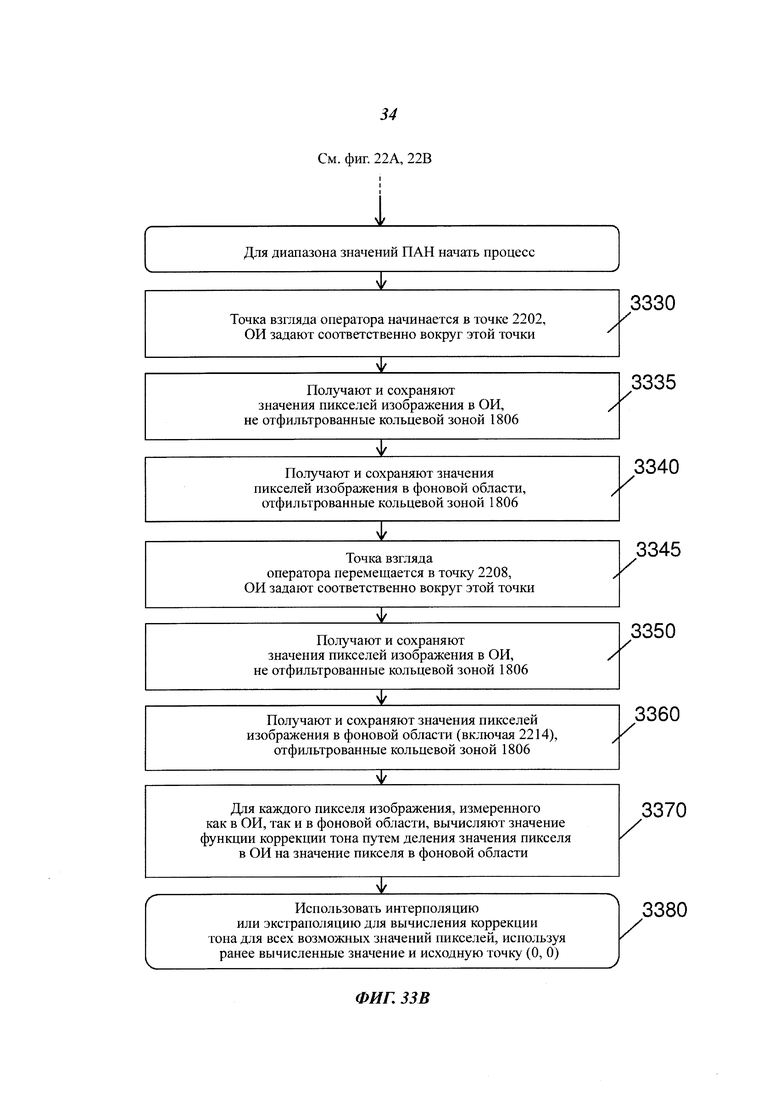
Группа изобретений относится к области формирования рентгеновских изображений в многокадровом режиме. Рентгеновская система содержит источник рентгеновского излучения; детектор изображения; монитор; устройство ввода, выполненное с возможностью предоставления координат, относящихся к рентгеновскому изображению, отображаемому на мониторе; контроллер, соединенный с устройством ввода, причем контроллер выполнен с возможностью определения по меньшей мере одной области исследования (ОИ) на отображаемом изображении на основании координат, предоставленных указанным устройством ввода; коллиматор, выполненный с возможностью подвергать различные зоны пациента различным уровням излучения в соответствии с определенной областью исследования (ОИ); блок обработки изображений, соединенный с детектором и монитором, причем блок обработки изображений выполнен с возможностью обработки изображения, фиксируемого посредством коллиматора, путем коррекции по меньшей мере одной части изображения, находящейся за пределами одной ОИ, в соответствии с ранее полученными данными, содержащими часть изображения, которая находилась в одной бывшей ОИ, используя функцию коррекции тона. Технический результат – повышение точности коррекции тона на основании ранее полученных данных ОИ. 3 н. и 4 з.п. ф-лы, 33 ил., 5 табл.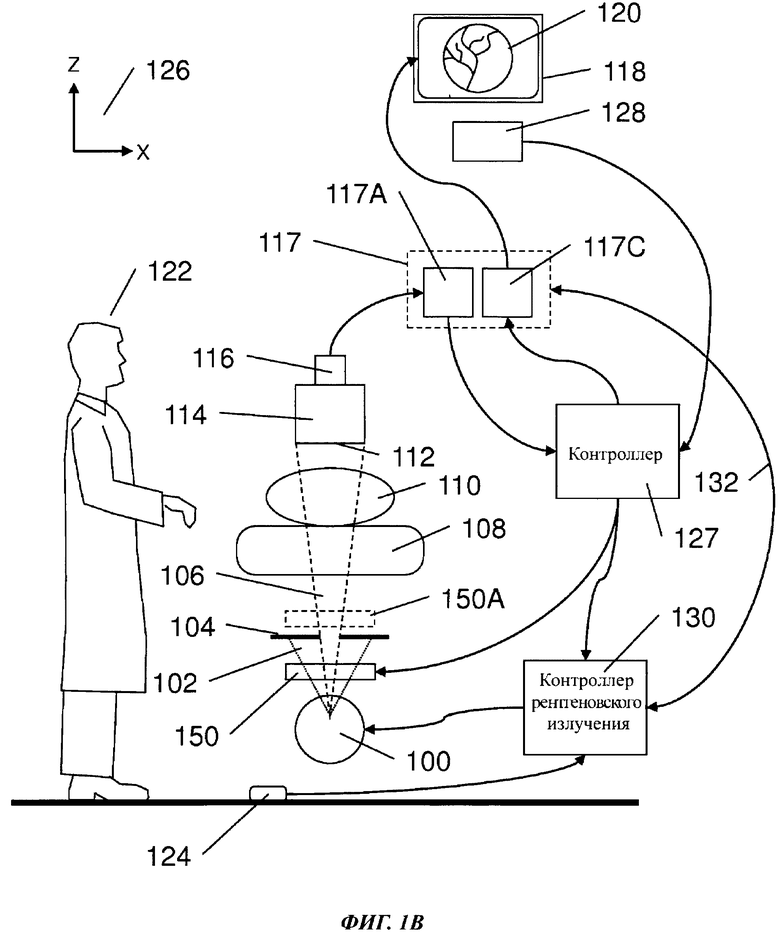
1. Рентгеновская система, содержащая:
источник рентгеновского излучения;
детектор изображения;
монитор;
по меньшей мере одно устройство ввода, выполненное с возможностью предоставления координат, относящихся к рентгеновскому изображению, отображаемому на указанном мониторе;
контроллер, соединенный с указанным по меньшей мере одним устройством ввода, причем указанный контроллер выполнен с возможностью определения по меньшей мере одной области исследования (ОИ) на указанном отображаемом изображении на основании координат, предоставленных указанным по меньшей мере одним устройством ввода;
коллиматор, выполненный с возможностью подвергать различные зоны пациента различным уровням излучения в соответствии с указанной определенной по меньшей мере одной областью исследования (ОИ); и
блок обработки изображений, соединенный с указанным детектором и указанным монитором, причем указанный блок обработки изображений выполнен с возможностью обработки изображения, фиксируемого посредством указанного коллиматора, путем коррекции по меньшей мере одной части изображения, находящейся за пределами указанной определенной по меньшей мере одной ОИ, в соответствии с ранее полученными данными, содержащими по меньшей мере часть указанной по меньшей мере одной части изображения, которая находилась по меньшей мере в одной бывшей ОИ, используя функцию коррекции тона.
2. Способ оптимизации отображения рентгеновского изображения, фиксируемого от источника рентгеновского излучения, содержащий следующее:
обеспечивают по меньшей мере одно устройство ввода, выполненное с возможностью предоставления координат, относящихся к рентгеновскому изображению, отображаемому на указанном мониторе;
определяют по меньшей мере одну область исследования (ОИ) на указанном отображаемом изображении на основании координат, предоставляемых указанным по меньшей мере одним устройством ввода;
обеспечивают коллиматор, выполненный с возможностью подвергать различные зоны пациента различным уровням излучения в соответствии с указанной определенной по меньшей мере одной областью исследования (ОИ);
фиксируют рентгеновское изображение, содержащее указанную по меньшей мере одну ОИ посредством указанного коллиматора; и
обрабатывают фиксированное изображение путем коррекции по меньшей мере одной части изображения, находящейся за пределами указанной определенной по меньшей мере одной ОИ, в соответствии с ранее полученными данными, содержащими по меньшей мере часть указанной по меньшей мере одной части изображения, которая находилась по меньшей мере в одной бывшей ОИ, используя функцию коррекции тона.
3. Способ по п. 2, в котором указанные ранее полученные данные содержат данные, собранные у нескольких пациентов.
4. Способ по п. 3, в котором указанную функцию коррекции тона реализуют как одну из следующих функций: функция яркости, функция контрастности, гамма-функция, функция смещения, линейная функция n-й степени и нелинейная функция.
5. Система для повышения качества рентгеновского изображения, отображаемого на мониторе, содержащая:
по меньшей мере одно устройство ввода, выполненное с возможностью предоставления координат, относящихся к рентгеновскому изображению, отображаемому на указанном мониторе;
контроллер, соединенный с указанным по меньшей мере одним устройством ввода, причем указанный контроллер выполнен с возможностью определения по меньшей мере одной области исследования (ОИ) на указанном отображаемом изображении на основании координат, предоставленных указанным по меньшей мере одним устройством ввода; и
блок обработки изображений, соединенный с указанным монитором, причем указанный блок обработки изображений выполнен с возможностью обработки фиксированного изображения путем коррекции по меньшей мере одной части изображения, находящейся за пределами указанной определенной по меньшей мере одной ОИ, в соответствии с ранее полученными данными, содержащими по меньшей мере часть указанной по меньшей мере одной части изображения, которая находилась по меньшей мере в одной бывшей ОИ, используя функцию коррекции тона; причем указанное фиксированное изображение содержит указанную определенную по меньшей мере одну ОИ.
6. Система по п. 5, в которой указанные ранее полученные данные содержат данные, собранные у нескольких пациентов.
7. Система по п. 6, в которой указанная функция коррекции тона реализована как одна из следующих функций: функция яркости, функция контрастности, гамма-функция, функция смещения, линейная функция n-й степени и нелинейная функция.
| US 2011013742 A1, 20.01.2011 | |||
| US 2012199750 A1, 09.08.2012 | |||
| WO 1998036690 A1, 27.08.1998 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ЯРКОСТИ В ЗОНЕ ИНТЕРЕСА ЦИФРОВОГО МЕДИЦИНСКОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2010 |
|
RU2431196C1 |

