Заявленное изобретение относится к области оптико-электронного приборостроения, а точнее к оптико-электронным следящим системам, предназначенным для поиска и обнаружения малоразмерных слабоизлучающих подвижных целей, и может быть использовано в автоматических оптико-электронных приборах (ОЭП) с цифровой обработкой изображений, осуществляющих селекцию целей в критических фоновых условиях.
Известен способ поиска и обнаружения точечных целей ОЭП (патент RU №2408898 С1, кл. G01S 17/06, G02B 23/12, публ. 20.07.2009 г.), включающий в себя проецирование оптической системой ОЭП изображения участка пространства, соответствующего полю зрения ОЭП, на фоточувствительную поверхность матричного фотоприемного устройства (МФПУ), преобразование МФПУ спроецированного изображения в матрицу значений электрических сигналов, ее запоминание, выбор в матрице значений электрических сигналов двух групп сигналов, относящимся к двум соответствующим взаимосвязанным группам элементов МФПУ, формирование из указанных групп сигналов сигнала цели плюс фона и сигнала фона, формирование сигнала цели как разности сигнала цели плюс фона и сигнала фона, сравнение сигнала цели с заранее выбранным порогом, регистрацию наличия цели для того положения групп, в котором имеет место превышение порога, выбор в матрице значений электрических сигналов для различных положений двух выбранных групп сигналов, формирование из данных групп сигналов сигнала цели плюс фона и сигнала фона, формирование сигнала цели как разности сигналов цели плюс фона и сигнала фона, сравнение сигнала цели с заранее выбранным порогом, регистрация наличия цели для того положения групп, в котором имело место превышение порога, при этом первая группа электрических сигналов (группа цели плюс фона) выбирается так, чтобы соответствующая ей группа элементов МФПУ составляла многоугольник минимальных размеров, описанный вокруг фигуры сечения эквивалентной функции рассеяния оптической системы ОЭП на уровне γ% энергии и не выходящий за пределы поля зрения ОЭП, вторая группа электрических сигналов (группа фона) выбирается так, чтобы соответствующая ей группа элементов МФПУ составляла совокупность четного числа 2n элементов, попарно симметрично расположенных относительно центра многоугольника первой группы, смещенных относительно этого центра за пределы многоугольника и не выходящих за пределы поля зрения, для каждого электрического сигнала группы цели плюс фона, заранее выбирается весовой коэффициент, пропорциональный доле энергии эквивалентной функции рассеяния оптической системы ОЭП для соответствующего этому сигналу элемента, для электрических сигналов группы фона заранее выбирается весовой коэффициент, равный сумме весовых коэффициентов группы цели плюс фона, поделенной на число элементов группы фона за вычетом 2n, формирование сигнала цели плюс фона производится путем суммирования электрических сигналов этой группы с заранее выбранными для них весовыми коэффициентами, формирование сигнала фона производится путем суммирования электрических сигналов этой группы и умножения суммы на заранее выбранный для этой группы весовой коэффициент.
Недостатком этого способа является высокая вероятность принятия ошибочных решений при поиске и обнаружении точечных целей в случае сложной фоновой ситуации, характеризующейся присутствием большого количества различных видов макроструктур земных и водных покровов как естественного, так и искусственного происхождения. При такой неоднородности фона возникают помехи, которые могут превышать полезные сигналы в десятки и даже сотни раз.
Также известно техническое решение, раскрытое в описании к патенту RU №2396574, кл. G01S 3/789, публ. 10.08.2010 г., которое выбрано в качестве прототипа. Известное и заявляемое технические решения имеют одно и то же назначение, решают сходные задачи и являются близкими по технической сущности и достигаемому результату. Несмотря на различие объектов (известный - устройство, заявляемый - способ) был проведен сопоставительный анализ их признаков, т.к. в описании к патенту в разделе «работа устройства» раскрыта совокупность действий над материальным объектом с помощью материальных средств. Теплопеленгатор (оптико-электронный прибор, ОЭП), обеспечивающий поиск и обнаружение источников излучения на пространственно-неоднородном фоне, осуществляет непрерывное строчно-кадровое сканирование поля обзора головным зеркалом, реализующим заданный закон движения линии визирования, проецирование объективом ОЭП изображения участка пространства, соответствующего полю зрения ОЭП, на чувствительный слой МФПУ, экспонирование спроецированного изображения каждого кадра длительностью, соответствующей времени компенсации вектора скорости движения линии визирования, реализуемой за счет встречного синхронного разворота зеркала дефлектора относительно головного зеркала и введения в блок управления зеркалом дефлектора сигнала с измерителя угловой скорости перемещения корпуса носителя, преобразование спроецированного изображения в матрицу значений электрических сигналов и формирование по ним сигналов цели и фона.
К недостаткам прототипа следует отнести относительно низкую чувствительность (соотношение сигнал/шум) и помехозащищенность при повышенном уровне яркости и сильно выраженных пространственных неоднородностях макроструктуры фона, что может приводить к недопустимо высокой вероятности ошибочных решений - пропуску цели или ложному обнаружению.
Задачей, на решение которой направлено заявляемое изобретение, является выполнение набора сложных функций - поиск и обнаружение астроориентиров, их селекция на фоне помех, слежение за астроориентирами, точное измерение угловых координат с помощью ОЭП. Особо следует отметить функции распознавания и определения ориентира, требующие задействования больших интеллектуальных ресурсов. При этом следует обратить внимание на функционирование, при котором выполняются действия над материальным объектом (в данном случае, над оптическим и электрическим сигналами) с помощью материальных средств (конструктивных решений теплопеленгатора) и аппаратных вычислительных средств.
Данная задача решается за счет того, что в известном способе поиска и обнаружения малоразмерных слабоизлучающих подвижных источников излучения на пространственно-неоднородном фоне оптико-электронными приборами, включающем непрерывное строчно-кадровое сканирование поля обзора головным зеркалом, обеспечивающим заданный закон движения линии визирования, проецирование объективом ОЭП изображения участка пространства, соответствующего полю зрения ОЭП, на чувствительный слой МФПУ, экспонирование спроецированного изображения каждого кадра длительностью, соответствующей времени компенсации вектора скорости движения линии визирования, реализуемой за счет встречного синхронного разворота зеркала дефлектора относительно головного зеркала и введения в блок управления зеркалом дефлектора сигнала с измерителя угловой скорости перемещения корпуса носителя, преобразование спроецированного изображения в матрицу значений электрических сигналов и формирование по ним сигналов цели и фона, исходную матрицу значений электрических сигналов формируют путем синхронного суммирования многократно снимаемых за кадр тактированных электрических сигналов по каждой из ячеек МФПУ на внутрикадровой линии задержки и накопления, фиксируют порядковый номер текущего кадра, для каждого кадра определяют вид фоновой обстановки путем считывания из памяти числа сигналов «ступень» плюс «линия» или значения дисперсии фона, полученных из предыдущего кадра, сравнивают их с заранее выбранными порогами и при достижении порога для числа сигналов «ступень» плюс «линия» или для значения дисперсии фона, а также, если кадр является первым, реализуют алгоритм сложной фоновой обстановки для определения параметров движения цели, а при недостижении ими пороговых значений - алгоритм простой фоновой обстановки; в случае простой фоновой обстановки находят Лапласиан по каждому из элементов матрицы сигналов как разность учетверенного значения текущего сигнала и значений четырех соседних сигналов матрицы по горизонтали и вертикали от текущего, сравнивают значения Лапласианов со считанным из памяти порогом дискриминации, рассчитанным из предыдущего кадра, и по полученным значениям надпороговых сигналов фиксируют цели, а по значениям подпороговых сигналов - участки однородного фона, дублируют исходную матрицу значений электрических сигналов, причем в первой матрице, именуемой «целевой», зануляют сигналы, идентифицированные ранее как однородный фон, а во второй матрице, именуемой «помеховой», зануляют сигналы, идентифицированные ранее как цели, рассчитывают значение дисперсии фона как среднее значение дисперсий всех сигналов «помеховой» матрицы, вырабатывают на ее основе пороги дискриминации и бинаризации и сохраняют значения дисперсии фона и порогов дискриминации и бинаризации в памяти до следующего кадра, сравнивают значения сигналов «целевой» и «помеховой» матриц со считанным из памяти порогом бинаризации, рассчитанным из предыдущего кадра, при этом при достижении порога приравнивают значение сигнала к единице, а при недостижении порога - к нулю, сохраняют в памяти «целевую» и «помеховую» матрицы до следующего кадра, определяют смещение соседних кадров путем нахождения корреляционной функции текущей «помеховой» матрицы сигналов и считанной из памяти «помеховой» матрицы сигналов предыдущего кадра, находят сдвиг максимума корреляционной функции, совмещают текущую «целевую» матрицу сигналов и считанную из памяти «целевую» матрицу сигналов предыдущего кадра по полученному ранее сдвигу максимума корреляционной функции «помеховых» матриц сигналов; в случае сложной фоновой обстановки формируют матрицы значений конечных разностей (первого и второго порядка) сигналов путем поэлементной разности соответствующих значений сигналов матрицы по всем направлениям, допускаемым использованной апертурой, обуславливающей количество соседних элементов матрицы, принятых в расчет, затем формируют матрицы значений дискретных производных (первого и второго порядка) сигналов путем поэлементного нормирования получившихся значений конечных разностей по расстояниям между отсчетами, ранжируют модули значений дискретных производных сигналов с нахождением наименьшего и наибольшего значений, формируют по каждому из элементов матрицы значения коэффициентов анизотропии (первого и второго порядка) как отношение наименьших и наибольших значений соответствующих дискретных производных сигналов, рассчитывают пороги дискриминации и бинаризации на основе найденных ранее по всему кадру значений наименьших и наибольших дискретных производных сигналов, а также коэффициентов анизотропии, сравнивают полученные значения наименьших и наибольших дискретных производных сигналов, а также коэффициентов анизотропии с порогами и регистрируют наличие соответствующих типов сигналов (цель, однородный фон, «ступень» или «линия») для того положения групп параметров, в котором имело место попадание в определенную область селекции, обусловленную рассчитанными порогами, подсчитывают количество сигналов «ступень» плюс «линия» и сохраняют в памяти до следующего кадра, дублируют исходную матрицу значений электрических сигналов, причем в первой матрице, именуемой «целевой», зануляют сигналы, идентифицированные ранее как однородный фон, «ступени» и «линии», а во второй матрице, именуемой «помеховой», зануляют сигналы, идентифицированные ранее как цели, сравнивают значения сигналов «целевой» и «помеховой» матриц с порогом бинаризации, при этом при достижении порога приравнивают значение сигнала к единице, а при недостижении порога - к нулю, сохраняют в памяти «целевую» и «помеховую» матрицы до следующего кадра, определяют смещение соседних кадров путем попарного сравнения текущей «помеховой» матрицы сигналов и считанной из памяти «помеховой» матрицы сигналов предыдущего кадра с целью выявления смещения соответствующих парных сигналов, сравнивают выявленные направления движения сигналов «линия» со считанным из памяти направлением движения сигнала цели и при совпадении переквалифицируют сигнал «линия» в сигнал «цель», совмещают текущую «целевую» матрицу сигналов и считанную из памяти «целевую» матрицу сигналов предыдущего кадра по полученному ранее смещению «помеховых» матриц сигналов, вырабатывают «строб ожидания» на основе данных о смещении предыдущего кадра; по полученным данным определяют на «целевой» матрице смещения сигналов цели в соседних кадрах, попарно идентифицированных в «стробе ожидания», для расчета по ним вектора скорости, а для серии трех кадров - вектора ускорения, и сохраняют в памяти направление движения сигнала цели до следующего кадра, вырабатывают гипотезу о траектории движения цели, по данным о траектории движения производят логическое подтверждение захвата цели, формируют матрицу значений электрических сигналов путем синхронного суммирования от кадра к кадру электрических сигналов на межкадровой линии задержки и накопления по минимальному количеству «попиксельных» гипотез (гипотез о межкадровых сдвигах на определенное число пикселей для каждой из гипотез по обеим осям координат), сравнивают выработанный модуль вектора скорости движения цели с заранее выбранным с учетом угла наблюдения порогом селекции по движению, при этом при достижении порога выдают результирующий сигнал об обнаружении цели, а при недостижении порога - сигнал об ошибке.
Технический результат, обеспечиваемый приведенной совокупностью признаков, заключается в снижении вероятностей ошибочных решений при высокоинтенсивных помехах фона. Он достигается путем введения двухступенчатой системы нелинейной селекции, действующей в процессе внутрикадровой (ВКО) и межкадровой (МКО) обработки с использованием соответственно топологических и кинематических алгоритмов нелинейной логической дискриминации, близких к оптимальным алгоритмам нелинейной фильтрации пространственно-временных сигналов, а также способом селекции по движению цели (СДЦ). В части улучшения чувствительности предлагаются средства существенного повышения эффективности накопления при ВКО за счет организации субкадрового накопления и при МКО за счет перехода от логического к синхронному накоплению по мере уточнения величин вектора скорости и ускорения цели.
Для пояснения сущности изобретения представлены следующие чертежи:
Фиг.1 - схема ОЭП;
Фиг.2 - алгоритм работы заявляемого объекта;
Фиг.3 - пример работы субкадрового накопления;
Фиг.4 - виды используемых апертур;
Фиг.5 - математические модели сигналов;
Фиг.6 - иллюстрация «невязки»;
Фиг.7 - пример определения скорости цели;
Фиг.8 - иллюстрация пространственного строба ожидания цели;
Фиг.9 - геометрия выбора гипотез движения;
Фиг.10 - уточненная конфигурация пространственного строба ожидания цели.
Как показано на фиг.1, в состав теплопеленгатора, реализующего заявляемый способ, входят:
- сканирующее зеркало 1, обеспечивающее просмотр пространства предметов, которое установлено в двухосном карданном подвесе 2, снабженном соответствующими датчиками углов 3-3', фиксирующими положение сканирующего зеркала 1, и приводами сканирующего зеркала 4-4';
- блок управления сканирующим зеркалом (линией визирования) 5, соединенный с датчиками углов 3-3' и приводами 4-4';
- электронный блок с вычислителем 6, подключенный к блоку управления сканирующим зеркалом 5;
- оптическая система, состоящая из двух оптических звеньев 7-8 и дефлектора с зеркалом 9, размещенного между вышеуказанными оптическими звеньями 7-8. Зеркало дефлектора 9 может быть установлено, например, в независимом торсионном подвесе, которое отклоняется электромагнитным приводом, или в двухосном карданном подвесе с датчиками углов 10-10' и приводами 11-11'. Кроме того, оптическая система включает фотоприемное устройство 12 (ФПУ), а точнее МФПУ;
- блок управления зеркалом дефлектора 13, соединенный с датчиками углов 10-10' и приводами 11-11', а также с блоком управления сканирующим зеркалом 5 и электронным блоком с вычислителем 6;
- блок обработки видеосигнала 14, подключенный к МФПУ 12, электронному блоку с вычислителем 6 и к блоку управления сканирующим зеркалом 5.
Воплощение заявленного изобретения включает в себя непрерывное строчно-кадровое сканирование поля обзора головным зеркалом 1, обеспечивающим заданный закон движения линии визирования, проецирование объективом 7-8 ОЭП изображения участка пространства, соответствующего полю зрения ОЭП, на чувствительный слой МФПУ 12, экспонирование спроецированного изображения каждого кадра длительностью, соответствующей времени компенсации вектора скорости движения линии визирования, реализуемой за счет встречного синхронного разворота зеркала дефлектора 9 относительно головного зеркала 1 и введения в блок управления зеркалом 13 дефлектора сигнала с измерителя угловой скорости перемещения корпуса носителя, преобразование спроецированного изображения в матрицу значений электрических сигналов и формирование по ним сигналов цели и фона.
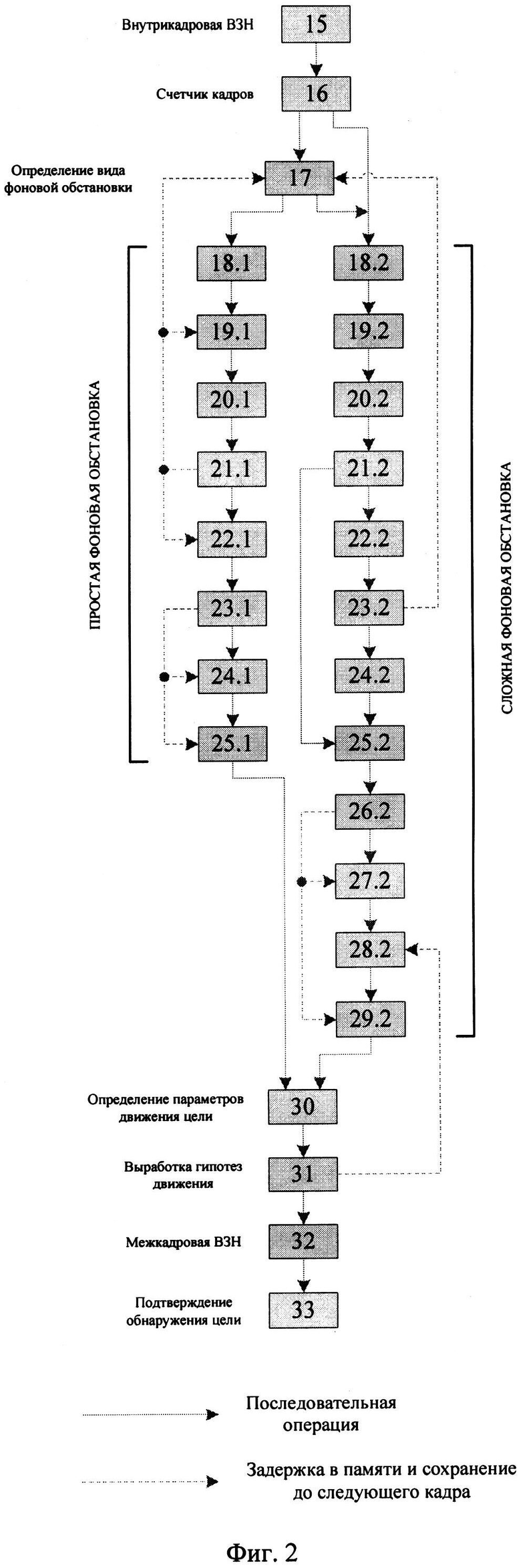
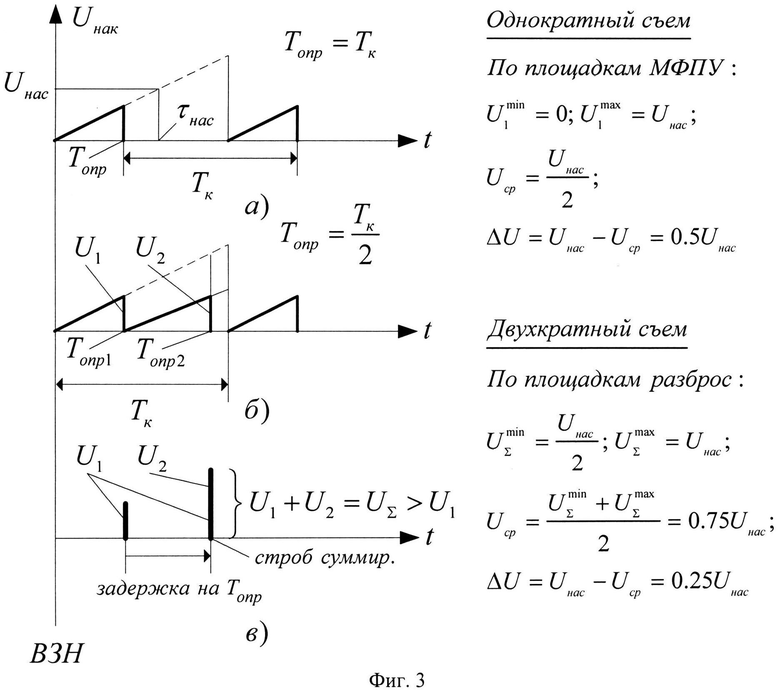
При этом для реализации всей совокупности признаков используются быстродействующий мультиплексор МФПУ 12, производящий многократный за время кадра опрос всех ячеек хранения фотозарядов матрицы - потенциальных ям (фиг.2, внутрикадровая временная задержка с накоплением (ВЗН) 15). Этот режим аналогичен используемому в матрицах с усложненной схемотехникой методу «неполного слива». В предлагаемом способе не требуется усложнения схемотехники ячейки, а субкадровое накопление сочетается с подавлением низкочастотного шума МФПУ вычитанием субкадровых отсчетов, что существенно в случае выбора для улучшения чувствительности значительной длительности кадра (~1-2 с). Период опроса должен быть при этом достаточно мал, чтобы исключить переполнение потенциальных ям до очередного съема сигнала при самом интенсивном фоновом потоке. Линию задержки в случае использования аналоговой матрицы выполняют встроенной и размещают в т.н. «холодной» зоне. В случае использования матрицы со встроенным аналогово-цифровым преобразователем (АЦП) линия задержки может быть вынесена в «теплую» зону. Эффект субкадрового накопления поясняется фиг.3, где UΣ - суммарный сигнал, UНАС - сигнал насыщения, UНАК - накопленный сигнал, UСР - среднее значение накопленного сигнала, Umin Σ - минимальный суммарный накопленный сигнал, Umax Σ - максимальный суммарный накопленный сигнал, ΔU - разброс сигнала по площадкам МФПУ. На примере сравнения по UΣ в случае однократного и двухкратного съема сигнала с потенциальных ям за кадр в ситуации сложного фона, когда τнас<Tк. При этом на фиг.3 изображены: 3а - однократный съем сигнала за кадр; 3б - двукратный съем сигнала за кадр; 3в - накопление сигнала; τнас - время насыщения; Tопр - время опроса; Tк - время кадра; Топр1, Топр2 - времена опроса за 1 и 2 съем сигнала соответственно. Подобный режим позволяет снимать сигнал до переполнения потенциальной ямы в самых сложных фоновых условиях, избегая тем самым «блюмингового эффекта». Одновременно, при субкадровом накоплении на линии задержки за счет многократного съема сигнала в кадре снижаются потери на съем сигнала по UΣ и разброс их по площадкам ΔU, обусловленный различной длительностью накопления отдельных площадок при их поочередном опросе в процессе экспозиции. Тем самым облегчается и улучшается коррекция неоднородной чувствительности по площадкам МФПУ (т.н. «геометрический шум»).
Согласно фиг.2, после формирования и съема матрицы значений исходных электрических сигналов оценивают фоново-целевую обстановку (ФЦО) в части статистических характеристик фона на пробном кадре в интересах адаптации под нее конфигурации и параметров схемы. При этом определяют количество критических видов неоднородностей фона (КВНФ) в поле зрения, величину и степень нестационарности дисперсии по площади поля. Пороговые значения этих величин сохраняют в памяти и передают из прошлого кадра. По результатам сравнения с порогами определяют вид фоновой обстановки 17: простой или сложной. При этом имеющийся счетчик кадров 16 фиксирует их, и, если кадр является первым, то реализуют алгоритм сложной фоновой обстановки, а иначе - переходят к определению вида ФЦО.
При простой ФЦО находят Лапласианы по каждому из элементов матрицы сигналов как разность учетверенного значения текущего сигнала и значений сигналов четырех соседних элементов матрицы по горизонтали и вертикали от текущего (18.1). Это позволяет избежать излишнего «зашумления» изображения, присущего схеме дискриминации КВНФ. Затем значения Лапласианов сравнивают с порогом дискриминации, сохраненным в памяти с предыдущего кадра (19.1). По полученным значениям надпороговых сигналов фиксируют цели, а по значениям подпороговых сигналов - участки однородного фона. Далее формируют «помеховую» и «целевую» матрицы путем дублирования исходной матрицы значений сигналов, причем на «помеховой» матрице зануляют сигналы, идентифицированные ранее как цели, а на «целевой» матрице - идентифицированные ранее как однородный фон (20.1). На следующей операции ведут подсчет дисперсии фона на основе сигналов «помеховой» матрицы, вырабатывают на ее основе пороги дискриминации и бинаризации и сохраняют в памяти значений дисперсии фона и порогов до следующего кадра (21.1). Далее значения «целевой» и «помеховой» матриц сравниваются с порогом бинаризации, рассчитанным из предыдущего кадра, при этом при достижении порога приравнивают значение сигнала к единице, а при недостижении - к нулю (22.1). Полученные матрицы сохраняют до следующего кадра (23.1).
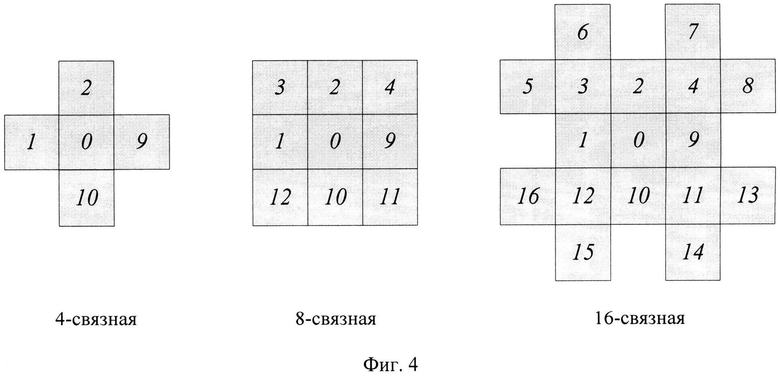
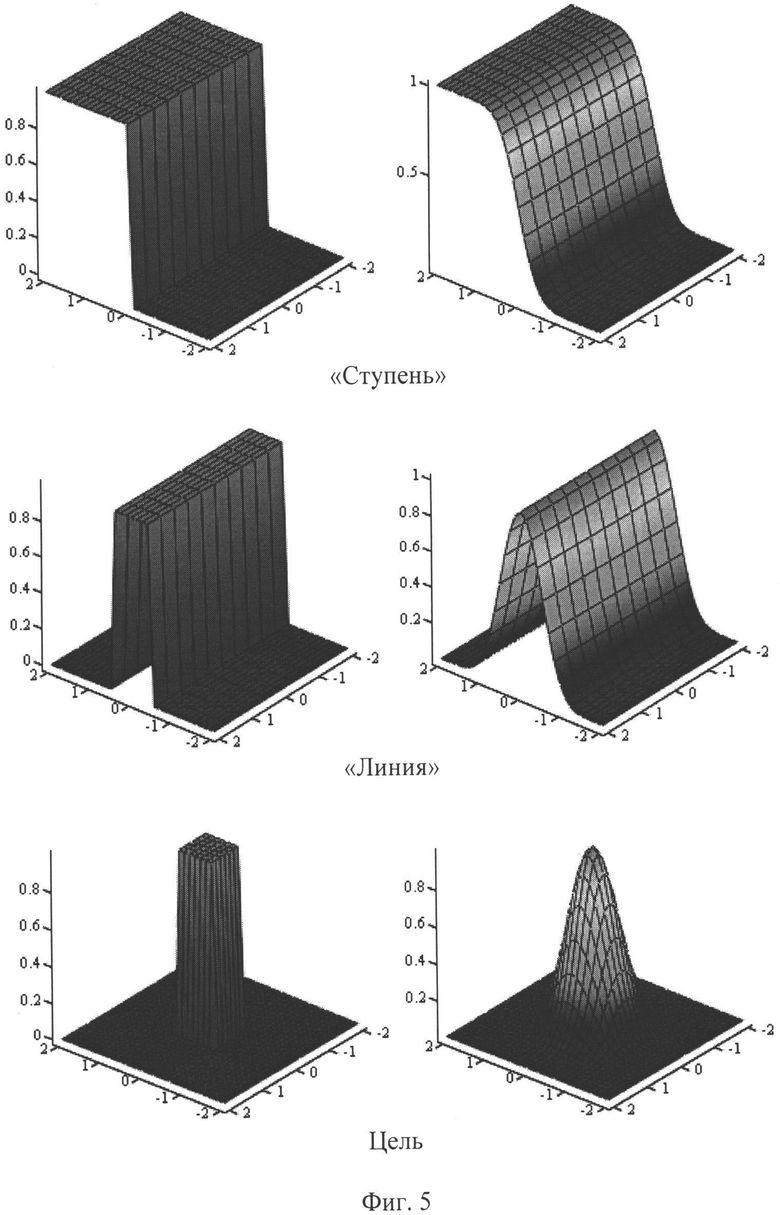
При сложной ФЦО выбирают конфигурацию групп элементов МФПУ, соседних с текущим пикселем, участвующих в формировании сигналов дискриминаторов малых участков яркостного рельефа изображения, в виде апертуры с 4-мя, 8-ю или 16-ю связями (фиг.4). Размер апертуры выбирают, исходя из условий качества дискриминации и скорости обработки данных. Из матрицы значений исходных сигналов считывают и сравнивают друг с другом значения сигналов в соседних элементах апертуры вокруг каждого из пикселей кадра, их разности по всем возможным в пределах данной апертуры направлениям нормируют на расстояния между соответствующими пикселями (18.2), формируя тем самым дискретные разнонаправленные производные первого порядка, отражающие величины градиентов поля сигналов по различным углам ориентации. Затем сигналы подобным же образом дискретно дифференцируют вторично для выявления крутизны яркостного рельефа (19.2). Направленные дискретные производные по модулю сравнивают друг с другом, определяют наименьшую и наибольшую из них, определяют их отношения - коэффициенты анизотропии первого и второго порядка, характеризующие степень вытянутости фигуры объекта в пределах апертуры дискриминатора (20.2). Далее производят выработку порогов дискриминации и бинаризации, основываясь на ранее найденных по всему кадру наименьших и наибольших дискретных производных сигналов, а также коэффициентах анизотропии первого и второго порядка (21.2). Полученные значения дискретных производных и коэффициентов анизотропии сравнивают с порогами, и регистрируют наличие соответствующего сигнала: цель (точка), однородный фон, «ступень» или «линия» (22.2). Модели сигналов точка, «ступень» и «линия» проиллюстрированы на фиг.5 при этом «ступень» выявляют с помощью производных первого порядка, а точку и «линию» - второго порядка. Последние два типа сигналов («ступень» и «линия») формируют КВНФ. В результате дискриминации обосабливаются области селекции каждого из 4-х рассматриваемых сигналов. В общем виде их формируют по совокупности, объединяемой по правилу логического «И», значений порогов по каждому из указанных выше параметров, ограничивающих их численные значения либо сверху, либо снизу. При этом в координатах минимальных и максимальных производных эти области отграничивают ломаными линиями с вертикальными, горизонтальными и наклонными участками прямых линий. Для оптимизации соотношения ошибок распознавания разного рода границы между классами могут корректироваться. Процедура разделения на 4 типа сигналов может быть модифицирована в более простой и надежный способ последовательной попарной дискриминации. Это способ имеет преимущество относительных оценок с более взвешенным определением общего порога как глобального минимума совместного распределения двух множеств (метод «ближайшего соседа» в задаче дихотомии). По завершении дискриминации подсчитывают количество сигналов «ступень» плюс «линия». Это количество сохраняется в памяти до следующего кадра для определения типа ФЦО (23.2). Затем, как и при простой ФЦО, идет формирование «помеховой» и «целевой» матриц, получаемых путем дублирования исходной матрицы значений сигналов, причем на «помеховой» матрице зануляются сигналы, идентифицированные ранее как цели, а на «целевой» матрице - идентифицированные ранее как однородный фон, «ступени» и «линии» (24.2). Потом значения сигналов «целевой» и «помеховой» матриц сравниваются с порогами бинаризации. При этом при достижении порога значение сигнала приравнивается к единице, а при недостижении - к нулю (25.2). Полученные матрицы сохраняют до следующего кадра (26.2).
Последние операции при обеих ФЦО являются переходом от ВКО к МКО. Вся МКО при ярко выраженной динамике взаимного движения цели и космического (или другого летательного) аппарата базируется на учете движения носителя. Без этого невозможно изолировать движение цели и произвести кинематическую селекцию. Определение параметров движения цели также необходимо для организации эффективного накопления сигнала со стробированием последовательности целевых отметок и подавлением шумов вне стробов. Движение носителя вызывает уход назад наблюдаемого участка местности по отношению к направлению движения по орбите (трассе) - т.н. «бег местности» («б.м.»). Для предотвращения выхода наблюдаемого участка местности из поля зрения и из буферной кадровой памяти, «б.м.» должен быть не только измерен, но и скомпенсирован. При этом исключается и смаз изображения фона. Считая фон земного покрова физически неподвижным и пренебрегая вращением Земли и ветровым движением облачного покрова, «помеховые» кадры используют как опорные для учета относительно них перемещения цели. Для этого, прежде всего, должно быть измерено межкадровое смещение соседних кадров. Оно может быть ориентировочно определено с помощью программы орбитального движения (траектории полета), входом в которую служит измеряемое на борту системой навигации космического (или другого летательного) аппарата текущее положение носителя. Наибольшую сложность представляет здесь учет эллиптичности орбиты (отступление от круговой), помимо непрерывной программной отработки «б.м.» предусматривается ее корректировка отрицательной обратной связью с использованием непосредственного измерения остаточного значения смещения предыдущего кадра фона со сведением его до близкого к нулю значения путем регулировки скорости отработки на серии кадров. Это может делаться двояким способом в зависимости от степени сложности фона.
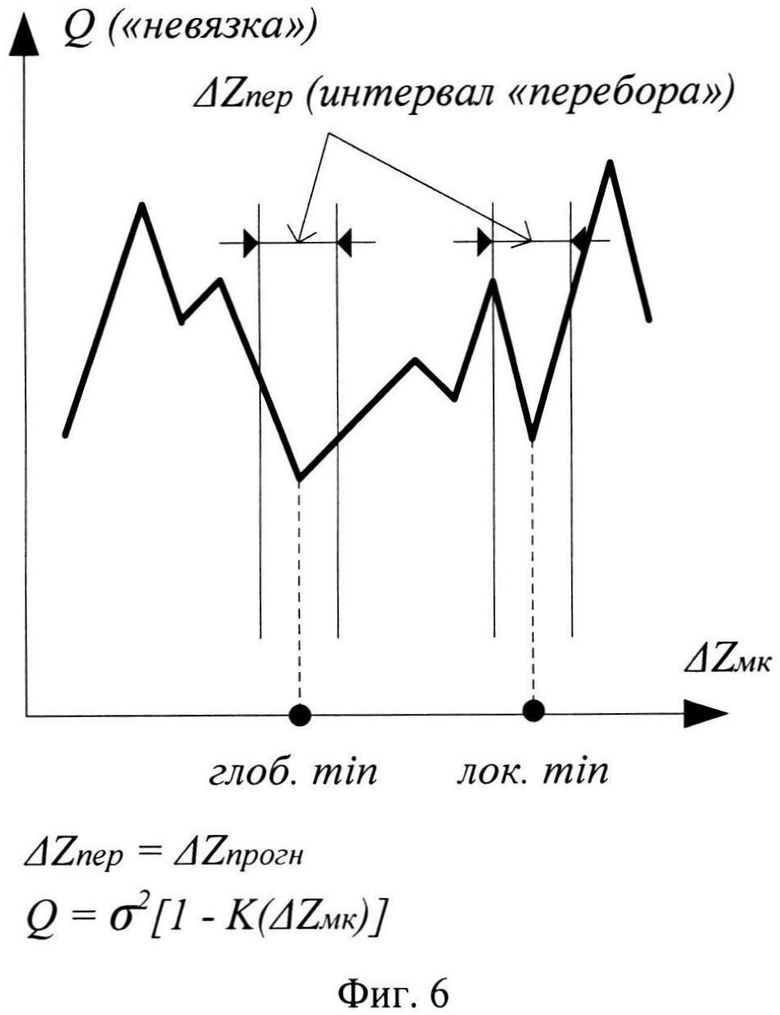
В случае простого фона привязка фоновых («помеховых») последовательных кадров осуществляется корреляционными методами. Производится сжатие массива попиксельных отсчетов с многократным объединением 4-х соседних пикселей в один с сокращением поперечника кадра до 16-32 пикселей. Затем определяют положение минимума функционала невязки (через максимум взаимной корреляционной функции соседних кадров - текущего и считанного из памяти предыдущего). По окончании проводят аналитическую оценку величины ошибки невязки - пространственного строба ожидания помехи (ПСО-П). В случае, когда она превышает размер пикселя, производят обратное «разжатие» массива пикселей кадра возвратом на несколько ходов с разделением каждого пикселя на 4 и с повторной оценкой положения минимума невязки, а также с новой последующей оценкой величины ошибки. При недопустимо большом ее значении производится новый цикл поиска положения минимума функционала невязки методом наискорейшего спуска по двум переменным до попадания в соответствующий ПСО-П размером в один пиксель. Последние операции условно иллюстрируются фиг.6, где ΔZПЕР - интервал «перебора» значений смещений, K - корреляционная функция, ΔZМК - межкадровый сдвиг. ΔZ имеет смысл обобщенного сдвига по осям X и Y. Весь блок описанных операций содержится в блоке 24.1 на фиг.2. В случае сложного фона оценка смещения кадров проводится по совокупности смещений идентичных отметок пар «ступеней» и «линий» с осреднением по всем имеющимся в кадре отметкам (27.2).
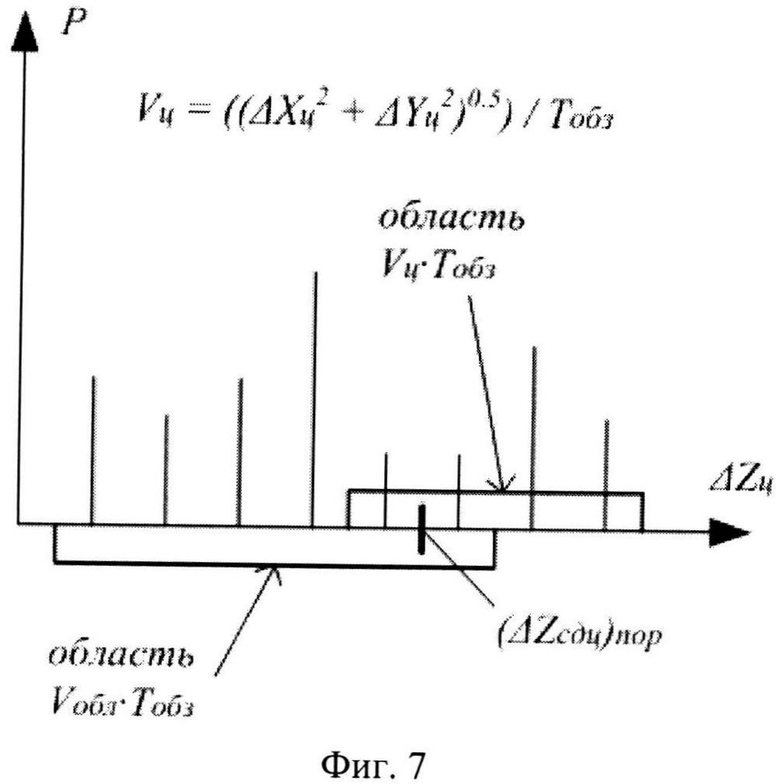
Далее оценивают вектор скорости цели как гипотенузу прямоугольного треугольника, где катеты - это сдвиги по ортогональным осям координат. Операция по основному смыслу поясняется фиг.7, где P - вероятность селекции, ΔZЦ - сдвиг отметки цели, (ΔZСДЦ)ПОР - пороговое смещение отметки цели при селекции по движению, VЦ - скорость цели, ΔXЦ - смещение отметки цели по координате X, ΔYЦ - смещение отметки цели по координате Y, TОБЗ - время обзора, VОБЛ - скорость движения облаков. При этом сравниваются выявленные направления движения сигналов «линия» со считанным из памяти направлением движения сигнала цели и при совпадении сигнал «линия» переквалифицируют в сигнал «цель» (операция 28.2). Деблокирование «линии» обязано своим происхождением «хвосту» за целью, обусловленному свечением факела выхлопных газов двигателя цели. В этом случае делается исключение из определения цели как непременно «точечного» источника излучения. После этого привязку «помеховых» кадров переносят на аналогичные «целевые» кадры, независимо от того, был ли это простой или сложный фон (операции 25.1 и 29.2).
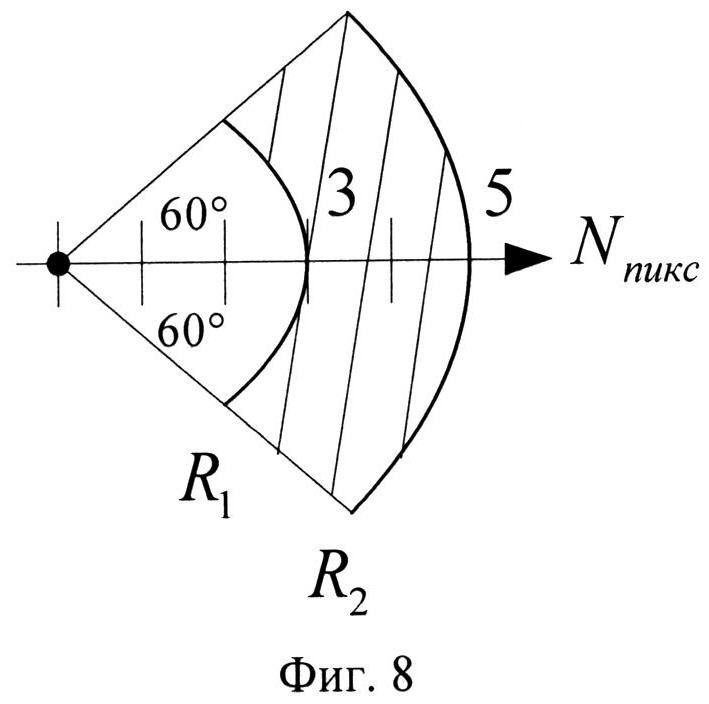
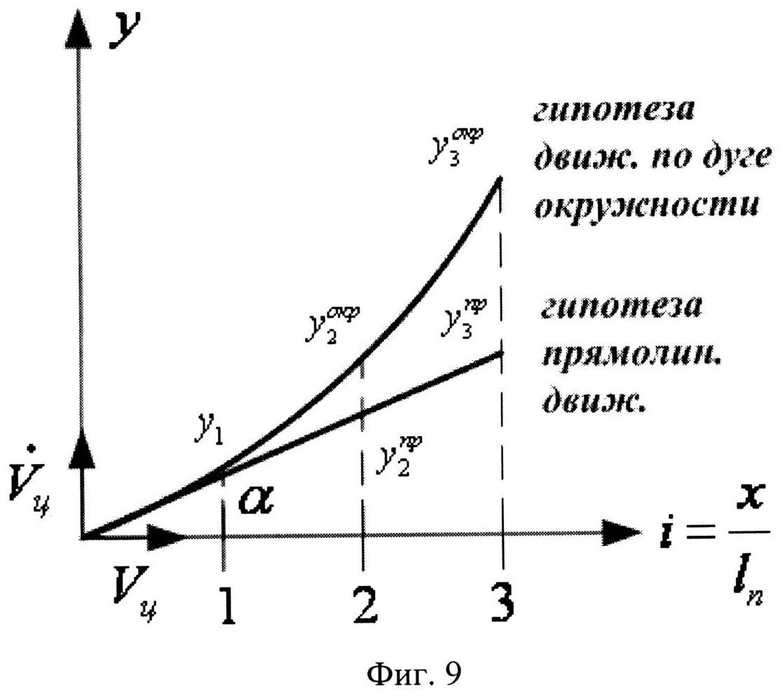
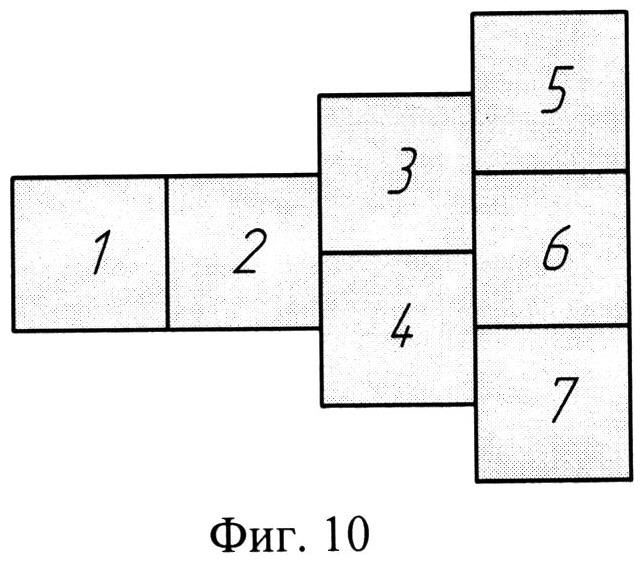
По ожидаемому диапазону ошибок прогноза положения следующей засечки цели определяют конфигурацию пространственного строба ожидания цели (ПСО-Ц) - зоны возможного появления очередных отметок цели (30). Начальные значения ошибок определяются погрешностями целеуказания, а также диапазоном возможных значений модуля скорости цели и раскрывом веера направлений ее возможных траекторий (трасс). Последнее иллюстрируется на фиг.8, где R1 - минимальный радиус ПСО-Ц, R2 - максимальный радиус ПСО-Ц, NПИКС - число пикселей (продольный сдвиг). Далее по наблюдению последовательных положений цели в трех последних кадрах выбирают одну из двух кардинальных гипотез ее движения: с постоянным вектором скорости (прямолинейное, равномерное движение) или с постоянным модулем бокового ускорения (предельно интенсивный разворот по дуге окружности). Геометрия выбора этих гипотез поясняется фиг.9, где yi - поперечное смещение цели за такт, i - количество отметок (тактов), x - продольное смещение цели за такт, ln - размер пикселя на местности, α - угол ориентации вектора скорости цели, операция 31, фиг.2. На протяжении 4-х первых кадров (включая пробный) проходит переходный процесс определения параметров движения цели, сопровождаемый некоторым улучшения пороговой чувствительности, которое достигается низкопороговым логическим накоплением с подтверждением присутствия цели в очередных ПСО-Ц, размер которых еще не позволяет непосредственно перейти к синхронному накоплению. Оно становится доступным после окончания «энергокинематических» итераций, когда ПСО-Ц принимает конфигурацию типа изображенной на фиг.10. Количество пикселей в подобном ПСО-Ц позволяет считать каждый из них представителем определенной гипотезы движения цели в пределах одной из двух кардинальных гипотез, выбранных ранее. При этом межкадровые сдвиги парных отметок цели приобретают уже регулярный характер, что позволяет производить синхронное накопление перебором небольшого числа вариантов гипотез в пределах текущего ПСО-Ц (32).
Уменьшению погрешностей оценки вектора скорости может способствовать использование дискретного сопровождения цели с шагами примерно в размер поля зрения. На завершающем этапе сравнивают выработанный модуль вектора скорости движения цели с заранее выбранным с учетом угла наблюдения порогом селекции по движению. При этом при достижении порога выдается результирующий сигнал о подтверждении обнаружения цели, а при недостижении порога - сигнал об ошибке (33).
При длительном накоплении (приближенно соответствующем идеальному) выигрыш по пороговой чувствительности может достигать очень больших значений. Например, при общем времени наблюдения в 15 минут, распределенному между 10-ю последовательно сопровождаемыми целями, без срывов завязки треков и при указанных выше значениях времени кадра пороговая чувствительность ОЭП, меняющаяся по известному закону обратно значению квадратного корня от времени накопления, может улучшиться чуть ли не на порядок. При одноцелевой ситуации выигрыш будет еще втрое больше.
Описанное построение схем ВКО и МКО позволяет не позже конца разрешенного периода наблюдения каждого из источников полезного сигнала выдать во внешний контур сигнал об уверенном обнаружении трека данной цели. При ошибочной завязке траектории достаточно быстро происходит срыв сопровождения ложного объекта внимания и завязка трека следующего по рейтингу источника.
Таким образом, настоящее изобретение снижает вероятность ошибочных решений по сравнению с известными способами за счет:
- улучшения чувствительности путем повышения эффективности накопления при ВКО за счет организации субкадрового накопления и при МКО за счет перехода от логического к синхронному накоплению по мере уточнения величин вектора скорости и ускорения цели,
- повышения помехозащищенности путем введения двухступенчатой системы нелинейной селекции, действующей в процессе ВКО и МКО с использованием соответственно топологических и кинематических алгоритмов нелинейной логической дискриминации, близких к оптимальным алгоритмам нелинейной фильтрации пространственно-временных сигналов, а также способом СДЦ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫДЕЛЕНИЯ ОБЪЕКТА В ИЗОБРАЖЕНИИ | 2011 |
|
RU2483354C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2338222C2 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЗОНЕ НА ЗАДАННОМ УДАЛЕНИИ ОТ ОПЕРАТОРА | 2007 |
|
RU2343503C2 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ЦЕЛЕЙ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2009 |
|
RU2408898C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2003 |
|
RU2250478C2 |
| Способ обнаружения структуры оптических неоднородностей атмосферы | 1988 |
|
SU1597816A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СКОРОСТНЫХ ЛЕТЯЩИХ ЦЕЛЕЙ И ГОЛОВКА САМОНАВЕДЕНИЯ, ЕГО РЕАЛИЗУЮЩАЯ | 2015 |
|
RU2603235C2 |
Изобретение относится к оптико-электронным следящим системам, предназначенным для поиска и обнаружения малоразмерных слабоизлучающих подвижных целей, и может быть использовано в автоматических оптико-электронных приборах (ОЭП) с цифровой обработкой изображений, обеспечивающих селекцию целей в критических фоновых условиях. В соответствии с предложенным способом производят непрерывное строчно-кадровое сканирование поля обзора и проецирование объективом ОЭП изображения участка пространства на чувствительный слой МФПУ. Спроецированное изображение преобразуют в матрицу значений электрических сигналов и формируют по ним сигналы цели и фона. Обнаружение цели производят на основе пороговой обработки сигнала. Технический результат - снижение вероятности ошибочных решений при высокоинтенсивных помехах фона. 10 ил.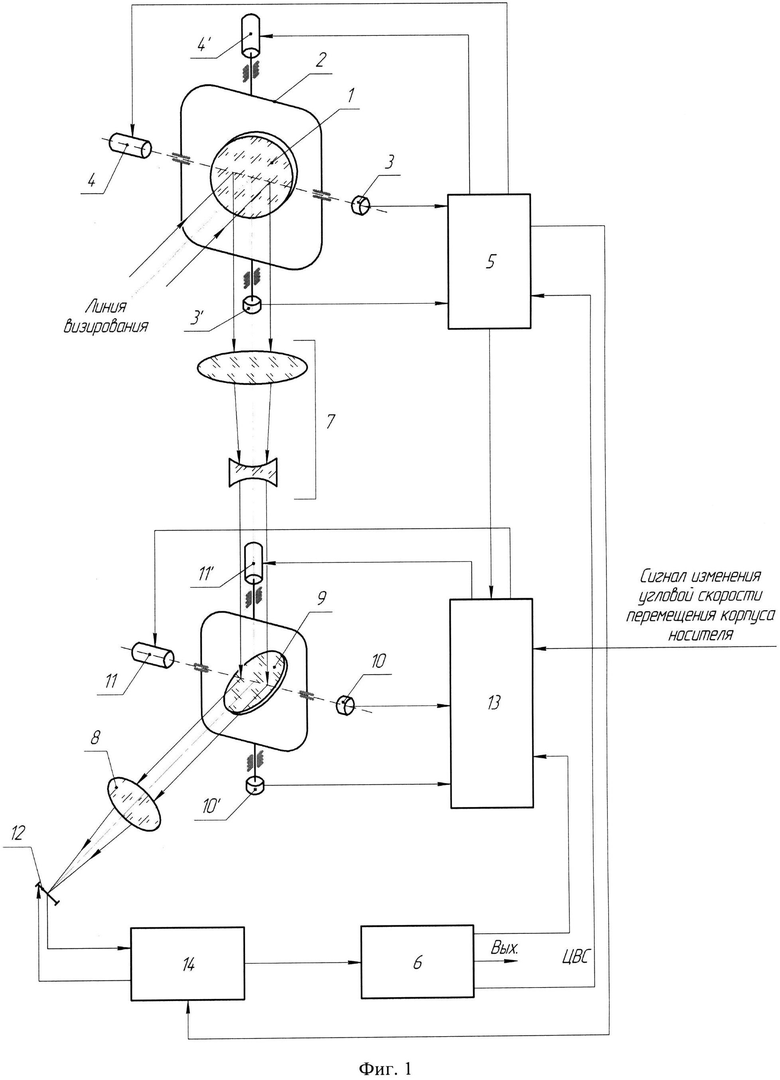
Способ поиска и обнаружения малоразмерных слабоизлучающих подвижных источников излучения на пространственно-неоднородном фоне оптико-электронными приборами (ОЭП), включающий непрерывное строчно-кадровое сканирование поля обзора головным зеркалом, обеспечивающим заданный закон движения линии визирования, проецирование объективом ОЭП изображения участка пространства, соответствующего полю зрения ОЭП, на чувствительный слой матричного фотоприемного устройства (МФПУ), экспонирование спроецированного изображения каждого кадра длительностью, соответствующей времени компенсации вектора скорости движения линии визирования, реализуемой за счет встречного синхронного разворота зеркала дефлектора относительно головного зеркала и введения в блок управления зеркалом дефлектора сигнала с измерителя угловой скорости перемещения корпуса носителя, преобразование спроецированного изображения в матрицу значений электрических сигналов и формирование по ним сигналов цели и фона, отличающийся тем, что исходную матрицу значений электрических сигналов формируют путем синхронного суммирования многократно снимаемых за кадр тактированных электрических сигналов по каждой из ячеек МФПУ на внутрикадровой линии задержки и накопления, фиксируют порядковый номер текущего кадра, для каждого кадра определяют вид фоновой обстановки путем считывания из памяти числа сигналов «ступень» плюс «линия» или значения дисперсии фона, полученных из предыдущего кадра, сравнивают их с заранее выбранными порогами и при достижении порога для числа сигналов «ступень» плюс «линия» или для значения дисперсии фона, а также, если кадр является первым, реализуют алгоритм сложной фоновой обстановки для определения параметров движения цели, а при недостижении ими пороговых значений - алгоритм простой фоновой обстановки; в случае простой фоновой обстановки находят Лапласиан по каждому из элементов матрицы сигналов как разность учетверенного значения текущего сигнала и значений четырех соседних сигналов матрицы по горизонтали и вертикали от текущего, сравнивают значения Лапласианов со считанным из памяти порогом дискриминации, рассчитанным из предыдущего кадра, и по полученным значениям надпороговых сигналов фиксируют цели, а по значениям подпороговых сигналов - участки однородного фона, дублируют исходную матрицу значений электрических сигналов, причем в первой матрице, именуемой «целевой», зануляют сигналы, идентифицированные ранее как однородный фон, а во второй матрице, именуемой «помеховой», зануляют сигналы, идентифицированные ранее как цели, рассчитывают значение дисперсии фона как среднее значение дисперсий всех сигналов «помеховой» матрицы, вырабатывают на ее основе пороги дискриминации и бинаризации и сохраняют значения дисперсии фона и порогов дискриминации и бинаризации в памяти до следующего кадра, сравнивают значения сигналов «целевой» и «помеховой» матриц со считанным из памяти порогом бинаризации, рассчитанным из предыдущего кадра, при этом при достижении порога приравнивают значение сигнала к единице, а при недостижении порога - к нулю, сохраняют в памяти «целевую» и «помеховую» матрицы до следующего кадра, определяют смещение соседних кадров путем нахождения корреляционной функции текущей «помеховой» матрицы сигналов и считанной из памяти «помеховой» матрицы сигналов предыдущего кадра, находят сдвиг максимума корреляционной функции, совмещают текущую «целевую» матрицу сигналов и считанную из памяти «целевую» матрицу сигналов предыдущего кадра по полученному ранее сдвигу максимума корреляционной функции «помеховых» матриц сигналов; в случае сложной фоновой обстановки формируют матрицы значений конечных разностей (первого и второго порядка) сигналов путем поэлементной разности соответствующих значений сигналов матрицы по всем направлениям, допускаемым использованной апертурой, обуславливающей количество соседних элементов матрицы, принятых в расчет, затем формируют матрицы значений дискретных производных (первого и второго порядка) сигналов путем поэлементного нормирования получившихся значений конечных разностей по расстояниям между отсчетами, ранжируют модули значений дискретных производных сигналов с нахождением наименьшего и наибольшего значений, формируют по каждому из элементов матрицы значения коэффициентов анизотропии (первого и второго порядка) как отношение наименьших и наибольших значений соответствующих дискретных производных сигналов, рассчитывают пороги дискриминации и бинаризации на основе найденных ранее по всему кадру значений наименьших и наибольших дискретных производных сигналов, а также коэффициентов анизотропии, сравнивают полученные значения наименьших и наибольших дискретных производных сигналов, а также коэффициентов анизотропии с порогами и регистрируют наличие соответствующих типов сигналов (цель, однородный фон, «ступень» или «линия») для того положения групп параметров, в котором имело место попадание в определенную область селекции, обусловленную рассчитанными порогами, подсчитывают количество сигналов «ступень» плюс «линия» и сохраняют в памяти до следующего кадра, дублируют исходную матрицу значений электрических сигналов, причем в первой матрице, именуемой «целевой», зануляют сигналы, идентифицированные ранее как однородный фон, «ступени» и «линии», а во второй матрице, именуемой «помеховой», зануляют сигналы, идентифицированные ранее как цели, сравнивают значения сигналов «целевой» и «помеховой» матриц с порогом бинаризации, при этом при достижении порога приравнивают значение сигнала к единице, а при недостижении порога - к нулю, сохраняют в памяти «целевую» и «помеховую» матрицы до следующего кадра, определяют смещение соседних кадров путем попарного сравнения текущей «помеховой» матрицы сигналов и считанной из памяти «помеховой» матрицы сигналов предыдущего кадра с целью выявления смещения соответствующих парных сигналов, сравнивают выявленные направления движения сигналов «линия» со считанным из памяти направлением движения сигнала цели и при совпадении переквалифицируют сигнал «линия» в сигнал «цель», совмещают текущую «целевую» матрицу сигналов и считанную из памяти «целевую» матрицу сигналов предыдущего кадра по полученному ранее смещению «помеховых» матриц сигналов, вырабатывают «строб ожидания» на основе данных о смещении предыдущего кадра; по полученным данным определяют на «целевой» матрице смещения сигналов цели в соседних кадрах, попарно идентифицированных в «стробе ожидания», для расчета по ним вектора скорости, а для серии трех кадров - вектора ускорения, и сохраняют в памяти направление движения сигнала цели до следующего кадра, вырабатывают гипотезу о траектории движения цели, по данным о траектории движения производят логическое подтверждение захвата цели, формируют матрицу значений электрических сигналов путем синхронного суммирования от кадра к кадру электрических сигналов на межкадровой линии задержки и накопления по минимальному количеству «попиксельных» гипотез, сравнивают выработанный модуль вектора скорости движения цели с заранее выбранным с учетом угла наблюдения порогом селекции по движению, при этом при достижении порога выдают результирующий сигнал об обнаружении цели, а при недостижении порога - сигнал об ошибке.
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ЦЕЛЕЙ ОПТИКО-ЭЛЕКТРОННЫМИ ПРИБОРАМИ | 2009 |
|
RU2408898C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ТОЧЕЧНОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННЫМ ПРИБОРОМ | 2009 |
|
RU2420761C1 |
| Способ реабилитации функциональных расстройств у больных с сердечно-сосудистыми заболеваниями | 1989 |
|
SU1731217A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОЙ ПРОКЛАДКИ СТАНИОЛЯ ПРИ НЕПРЕРЫВНОЙ СТАНКОВОЙ НАМОТКЕ КОНДЕНСАТОРНЫХ ПРОХОДНЫХ ИЗОЛЯТОРОВ | 1932 |
|
SU32591A1 |

