ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка испрашивает приоритет заявки на патент США № 16/129,404, озаглавленной «DYNAMIC RADIATION COLLIMATION FOR NON-DESTRUCTIVE ANALYSIS OF TEST OBJECTS» («Динамическое коллимирование излучения для неразрушающего анализа тестовых объектов») и поданной 12 сентября 2018 года, полное содержание которой включено в настоящую заявку по ссылке.
ОБЛАСТЬ ТЕХНИКИ
[0002] Это раскрытие относится к цифровой радиографии и компьютерной томографии.
УРОВЕНЬ ТЕХНИКИ
[0003] Рентгеновская цифровая радиография (digital radiography - DR) является широко используемой неинвазивной и неразрушающей технологией визуализации, использующей цифровые детекторы рентгеновских лучей, такие как плоскопанельные детекторы, камеры на основе приборов с зарядовой связью (charge-coupled device - CCD), или камеры на основе комплементарной структуры металл-оксид-полупроводник (complementary metal-oxide-semiconductor - CMOS), или линейные диодные матрицы (linear diode array - LDA). Рентгеновская компьютерная томография (computed tomography - CT) является процедурой, которая использует компьютерно-обрабатываемые рентгеновские радиографические изображения или синограммы, получаемые под разными углами наблюдения, для создания трехмерных (3D) данных и двумерных (2D) изображений объекта. Томографическое изображение объекта является изображением концептуально двумерного «среза» объекта, которое может быть сгенерировано из радиографических изображений или синограммы. Вычислительное устройство может использовать томографические изображения, радиографические изображения, или синограммы объекта для генерирования трехмерных данных для объекта, например, трехмерной модели объекта. Рентгеновская CT может быть использована в промышленных целях для проведения неразрушающего оценивания объектов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В одном примере, это раскрытие описывает способ генерирования томографических данных тестового объекта, причем способ содержит этапы, на которых: для каждого соответствующего поворотного положения первой фазы из набора из двух или более поворотных положений первой фазы: генерируют, посредством системы визуализации, соответствующее изображение первой фазы в первой последовательности изображений, причем соответствующее изображение первой фазы генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы; идентифицируют, посредством системы визуализации, область интереса (region of interest - ROI) в соответствующем изображении первой фазы, причем ROI соответствует части оцениваемого тестового объекта; и определяют, посредством системы визуализации, на основе идентифицированной ROI в соответствующем изображении первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы, причем излучение излучается генератором излучения и проходит через апертуру коллиматора, коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора; для каждого соответствующего поворотного положения второй фазы из набора из двух или более поворотных положений второй фазы: определяют, посредством системы визуализации, на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для соответствующего поворотного положения второй фазы; и генерируют, посредством системы визуализации, соответствующее изображение второй фазы во второй последовательности изображений, причем соответствующее изображение второй фазы является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы; и вычисляют, посредством системы визуализации, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
[0005] В другом примере, это раскрытие описывает систему визуализации, содержащую: генератор излучения; детектор излучения; коллиматор, причем излучение, излучаемое генератором излучения, проходит через апертуру коллиматора, коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора; и систему обработки, выполненную с возможностью: для каждого соответствующего поворотного положения первой фазы из набора из двух или более поворотных положений первой фазы: генерировать соответствующее изображение первой фазы в первой последовательности изображений, причем соответствующее изображение первой фазы генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы; идентифицировать область интереса (ROI) в соответствующем изображении первой фазы, причем ROI соответствует части оцениваемого тестового объекта; и определять, на основе идентифицированной ROI в соответствующем изображении первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы; для каждого соответствующего поворотного положения второй фазы из набора из двух или более поворотных положений второй фазы: определять, на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для соответствующего поворотного положения второй фазы; и генерировать соответствующее изображение второй фазы во второй последовательности изображений, причем соответствующее изображение второй фазы является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы; и вычислять, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
[0006] В другом примере, это раскрытие описывает невременный компьютерно-читаемый носитель данных, имеющий команды, хранимые на нем, которые, при выполнении, заставляют один или несколько процессоров, для каждого соответствующего поворотного положения первой фазы из набора из двух или более поворотных положений первой фазы: генерировать соответствующее изображение первой фазы в первой последовательности изображений, причем соответствующее изображение первой фазы генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы; идентифицировать область интереса (ROI) в соответствующем изображении первой фазы, причем ROI соответствует части оцениваемого тестового объекта; и определять, на основе идентифицированной ROI в соответствующем изображении первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы, причем излучение излучается генератором излучения и проходит через апертуру коллиматора, коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора; для каждого соответствующего поворотного положения второй фазы из набора из двух или более поворотных положений второй фазы: определять, на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для соответствующего поворотного положения второй фазы; и генерировать соответствующее изображение второй фазы во второй последовательности изображений, причем соответствующее изображение второй фазы является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы; и вычислять, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
[0007] Детали одного или нескольких примеров изложены в прилагаемых чертежах и описании, приведенном ниже. Другие признаки, объекты, и преимущества будут понятны из описания, чертежей, и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является схематичным чертежом иллюстративной системы визуализации согласно одной или нескольким технологиям этого раскрытия.
[0009] Фиг. 2А является концептуальным чертежом иллюстративной системы визуализации, когда тестовый объект находится в первом поворотном положении во время второй фазы сканирования, согласно одной или нескольким технологиям этого раскрытия.
[0010] Фиг. 2В является концептуальным чертежом иллюстративных положений пластин коллиматора, когда тестовый объект находится в первом поворотном положении, показанном на фиг. 2А.
[0011] Фиг. 2С является концептуальным чертежом иллюстративной системы визуализации, когда тестовый объект находится во втором поворотном положении во время второй фазы сканирования, согласно одной или нескольким технологиям этого раскрытия.
[0012] Фиг. 2D является концептуальным чертежом иллюстративных положений пластин коллиматора, когда тестовый объект находится во втором поворотном положении, показанном на фиг. 2С.
[0013] Фиг. 3А показывает первый иллюстративный тестовый объект в первом поворотном положении.
[0014] Фиг. 3В показывает тестовый объект фиг. 3А во втором поворотном положении, отличном от первого поворотного положения.
[0015] Фиг. 4А показывает иллюстративную рентгенограмму тестового объекта в отсутствие коллимирования.
[0016] Фиг. 4В показывает иллюстративную рентгенограмму тестового объекта фиг. 4А в случае стандартного, нединамического коллимирования компьютерной томографии (computed tomography - CT) в 0-градусном поворотном положении.
[0017] Фиг. 4С показывает иллюстративную рентгенограмму тестового объекта фиг. 4А-4В в случае динамического CT-коллимирования в 0-градусном поворотном положении согласно одной или нескольким технологиям этого раскрытия.
[0018] Фиг. 4D показывает иллюстративную рентгенограмму тестового объекта фиг. 4А-4С в отсутствие коллимирования в 90-градусном поворотном положении.
[0019] Фиг. 4Е показывает иллюстративную рентгенограмму тестового объекта фиг. 4А-4D в случае стандартного, нединамического СТ-коллимирования в 90-градусном поворотном положении.
[0020] Фиг. 4F показывает иллюстративную рентгенограмму тестового объекта фиг. 4А-4Е в случае динамического CT-коллимирования в 90-градусном поворотном положении согласно одной или нескольким технологиям этого раскрытия.
[0021] Фиг. 5 является блок-схемой последовательности операций, показывающей первое иллюстративное функционирование системы визуализации согласно одной или нескольким технологиям этого раскрытия.
[0022] Фиг. 6 является блок-схемой последовательности операций, показывающей второе иллюстративное функционирование системы визуализации согласно одной или нескольким технологиям этого раскрытия.
[0023] Фиг. 7 является схематичным чертежом иллюстративной системы визуализации согласно одной или нескольким технологиям этого раскрытия.
[0024] Фиг. 8 является схематичным чертежом иллюстративной системы визуализации согласно одной или нескольким технологиям этого раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0025] В общем, это раскрытие относится к динамическому коллимированию в компьютерной томографии. В типичной рентгеновской системе визуализации, рентгеновская система визуализации включает в себя детектор излучения и генератор излучения. Детектор излучения детектирует рентгеновские лучи, генерируемые генератором излучения, и выдает электрические сигналы, соответствующие структуре детектированных рентгеновских лучей. Оцениваемый тестовый объект располагают между детектором излучения и генератором излучения. Тестовый объект ослабляет рентгеновские лучи характерным образом, что приводит к структуре рентгеновских лучей, детектируемой детектором излучения. Система обработки рентгеновской системы визуализации генерирует изображение, такое как рентгенограмма, на основе электрических сигналов, выдаваемых детектором излучения.
[0026] Посредством поворота тестового объекта, рентгеновская система визуализации может генерировать набор рентгенограмм для различных поворотных положений тестового объекта или синограмму объекта. Система обработки может генерировать данные компьютерной томографии (CT) на основе набора рентгенограмм или синограмм, генерируемых таким образом. Таким образом, рентгеновская система визуализации может быть использована для рентгеновской радиографии и CT. Рентгеновская радиография и CT являются способами неинвазивного или неразрушающего получения двумерных (2D) и трехмерных (3D) данных в медицинской визуализации и в оценке неразрушающими методами (non-destructive evaluation - NDE).
[0027] Одной из проблем, связанных с рентгеновскими системами визуализации описанного выше типа, является то, что рентгеновские лучи, не проходящие прямо через тестовый объект, могут рассеиваться от оцениваемого тестового объекта и различных частей рентгеновской системы визуализации и могут отражаться на части детектора излучения, соответствующие области интереса. Например, рентгеновские лучи могут отражаться от стенок камеры, которая содержит тестовый объект и детектор излучения. Это может приводить к уменьшению контраста в результирующих рентгенограммах. Уменьшение контраста может затруднять точную интерпретацию рентгенограмм и наборов CT-данных и может затруднять вычисление качественных томографических данных для тестового объекта.
[0028] Таким образом, при выполнении цифровой радиографии и CT следует понимать, что коллимирование лучей может быть использовано для улучшения контраста изображения и уменьшения артефактов визуализации вследствие уменьшения рассеянного излучения. Коллимирование обычно применяют к конусу излучения, ограничивая конус излучения внешней геометрией тестового объекта или конкретной областью интереса в тестовом объекте. Типичные системные коллиматоры обеспечивают средство для обеспечения статического, нединамического коллимирования при выполнении CT-сканирований. Коллимирование устанавливается один раз для обеспечения размера отверстия, которое будет выравниваться с максимальным размером области интереса (AOI) тестового объекта, которая проецируется на детектор излучения. Во время CT-сканирования асимметричного тестового объекта, тестовый объект поворачивают перед статическим коллимированным пучком рентгеновских лучей, и неоптимальное коллимирование может возникнуть во всех областях тестового объекта, где размеры области интереса меньше вышеупомянутого максимального размера AOI.
[0029] Согласно технологии этого раскрытия, коллиматор расположен между генератором излучения и детектором излучения. Например, в некоторых примерах коллиматор может быть расположен между генератором излучения и тестовым объектом. В некоторых примерах, коллиматор расположен между детектором излучения и тестовым объектом. Коллиматор может включать в себя одну или несколько пластин из защищающего от рентгеновских лучей материала, такого как свинец или вольфрам. Рентгеновские лучи, излучаемые генератором излучения, могут проходить через зазор между пластинами коллиматора. Этот зазор может называться апертурой коллиматора. Коллиматор может блокировать или ослаблять рентгеновские лучи, не проходящие через апертуру коллиматора. Согласно технологии этого раскрытия, размер апертуры может быть изменен на основе контура тестового объекта или области интереса (ROI) тестового объекта, когда объект поворачивается через различные поворотные положения. Таким образом, коллиматор уменьшает величину излучения до величины излучения, необходимой для визуализации тестового объекта или ROI тестового объекта. Это уменьшение излучения может уменьшить величину рассеиваемого рентгеновского излучения, которое может достигать детектора излучения, посредством чего потенциально увеличивается контраст в частях рентгенограмм, которые соответствуют тестовому объекту. Этот может улучшить качество результирующих CT-данных, основанных на рентгенограммах. Хотя это раскрытие часто относится к рентгеновским лучам, другие типы излучения могут быть использованы вместо рентгеновских лучей, например, гамма-лучи.
[0030] Таким образом, в одном примере этого раскрытия система визуализации может осуществлять первую фазу сканирования и вторую фазу сканирования. Во время первой фазы сканирования, система визуализации использует последовательность динамических или статических изображений для идентификации ROI в изображениях и использует ROI для определения положений коллиматорных пластин для набора поворотных положений (например, каждый 1 градус поворота на 360 градусов). Во время второй фазы сканирования, система визуализации может генерировать изображения в то время, когда коллиматорные пластины находятся в определенных положениях коллиматорных пластин для поворотных положений. В некоторых примерах, система визуализации может завершать первую фазу сканирования перед началом второй фазы сканирования. В некоторых примерах, система визуализации чередует первую фазу сканирования и вторую фазу сканирования таким образом, что первая и вторая фазы сканирования могут быть завершены за единственный поворот. В некоторых примерах, система визуализации может запоминать положения коллиматорных пластин, определенные на основе ROI в изображениях первой фазы, в виде командной и управляющей программы для использования при осуществлении второй фазы сканирования без необходимости повторять первую фазу сканирования для каждого отдельного тестового объекта.
[0031] Более конкретно, в некоторых примерах система визуализации может генерировать первую последовательность из двух или более изображений во время первой фазы сканирования для тестового объекта. Соответственно, это раскрытие может относиться к изображениям в первой последовательности изображений как к изображениям первой фазы. Первая последовательность изображений может быть последовательностью рентгенограмм или изображений другого типа. Каждое изображение в первой последовательности изображений может соответствовать отличному поворотному положению тестового объекта в наборе поворотных положений первой фазы. Набор поворотных положений первой фазы может быть множеством поворотных положений. Таким образом, для каждого соответствующего поворотного положения из набора поворотных положений первой фазы, данное изображение в первой последовательности изображений соответствует соответствующему поворотному положению первой фазы.
[0032] Дополнительно, в этом примере для каждого соответствующего поворотного положения первой фазы, система визуализации может идентифицировать область интереса (ROI) в изображении первой фазы, соответствующем соответствующему поворотному положению первой фазы. ROI соответствует части тестового объекта, например, конкретной части тестового объекта, или всему тестовому объекту, подлежащему оцениванию. Система визуализации также определяет, на основе идентифицированной ROI в изображении первой фазы, соответствующем соответствующему поворотному положению первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы. В этом примере, излучение излучается генератором излучения и проходит через апертуру коллиматора. Коллиматор расположен между генератором излучения и детектором излучения. Тестовый объект также расположен между генератором излучения и детектором излучения. Коллиматор включает в себя множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора. В некоторых примерах, система визуализации может независимо перемещать каждую из коллиматорных пластин.
[0033] Дополнительно, в этом примере, после определения положений коллиматорных пластин для поворотных положений первой фазы, система визуализации может определять, на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для набора поворотных положений второй фазы. Поворотные положения второй фазы могут быть такими же, как поворотные положения первой фазы, или отличными от них. Для каждого соответствующего поворотного положения второй фазы, система визуализации может генерировать соответствующее изображение второй фазы во второй последовательности изображений. Система визуализации может генерировать соответствующее изображение второй фазы в виде рентгенограммы на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы. Структура излучения является пространственной структурой большей или меньшей интенсивности излучения, детектируемой детектором излучения. Каждое соответствующее изображение второй фазы во второй последовательности изображений может быть рентгенограммой. В этом примере, система визуализации может вычислять, на основе второй последовательности изображений, томографические данные части оцениваемого тестового объекта.
[0034] В этом раскрытии, порядковые термины, такие как «первый», «второй», «третий» и т.д., не обязательно являются указателями положений в некотором порядке, а скорее могут быть использованы просто для различения разных примеров одного и того же предмета. Примеры, обеспеченные в этом раскрытии, могут быть использованы вместе, отдельно, или в различных комбинациях.
[0035] Фиг. 1 является схематичным чертежом иллюстративной системы 10 визуализации согласно одной или нескольким технологиям этого раскрытия. Как показано на фиг. 1, система 10 визуализации может включать в себя генератор 12 излучения и детектор 14 излучения. Хотя это и не показано в примере фиг. 1, система 10 визуализации может включать в себя один или несколько дополнительных генераторов излучения и/или один или несколько дополнительных детекторов излучения. Например, система 10 визуализации может включать в себя минифокусную/ общепринятую высокоэнергетическую трубку в качестве первого генератора излучения и микрофокусную трубку в качестве второго генератора излучения. В некоторых примерах, система 10 визуализации может включать в себя плоскопанельный детектор в качестве первого детектора излучения, а также может включать в себя один или несколько детекторов на линейных диодных матрицах. Генератор 12 излучения может излучать пучок 15 рентгеновских лучей. Следовательно, в некоторых примерах это раскрытие может относиться к генератору 12 излучения или подобным устройствам в качестве «источников излучения». В некоторых примерах, пучок 15 рентгеновских лучей имеет форму конуса. В других примерах, пучок 15 рентгеновских лучей имеет форму веера. В некоторых примерах, генератор 12 излучения генерирует рентгеновские лучи в диапазоне энергии от 20 кэВ до 600 кэВ. В других примерах, генератор 12 излучения генерирует рентгеновские лучи в других диапазонах энергии.
[0036] Детектор 14 излучения детектирует рентгеновские лучи, генерируемые генератором 12 излучения, и выдает электрические сигналы, соответствующие структуре детектированных рентгеновских лучей. В некоторых примерах, детектор 14 излучения является двумерным (2D) детектором рентгеновских лучей, таким как плоскопанельный детектор (flat panel detector - FPD). В других примерах, детектор 14 излучения может содержать двумерную матрицу чувствительных к излучению элементов, таких как фотодиоды. В некоторых примерах, система 10 визуализации содержит связанный с линзой сцинтилляционный детектор или детектор рентгеновских лучей другого типа вместо FPD или дополнительно к нему. FPD может включать в себя слой сцинтилляционного материала, такого как йодид цезия, нанесенный на аморфный кремний, на стеклянной детекторной матрице. В некоторых примерах, размер пикселов FPD может находиться в диапазоне от приблизительно 25 мкм до приблизительно 400 мкм. В других примерах, размер пикселов FPD или другого детектора может быть другим, и форма пиксела может быть либо квадратной, либо неизотропной. Дополнительно, поверхность детектора 14 излучения может быть плоской, криволинейной, или может иметь другую геометрическую форму для выравнивания с конкретными конфигурациями пучка рентгеновских лучей.
[0037] В других примерах, детектор 14 излучения является линейным детектором, таким как детектор рентгеновских лучей на линейных диодных матрицах (linear diode array - LDA). LDA-детектор рентгеновских лучей включает в себя одномерную матрицу фотодиодов. Каждый из фотодиодов соответствует отличному пикселу. Например, соотношение между фотодиодами и пикселами может быть один к одному. В других примерах, размер пикселов детектора 14 излучения находится в диапазоне от приблизительно 25 мкм до приблизительно 1000 мкм. В других примерах, размер пикселов детектора 14 излучения может быть другим, и форма пиксела может быть либо квадратной, либо неизотропной. Дополнительно, поверхность детектора 14 излучения может быть плоской, криволинейной, или может иметь другую геометрическую форму для выравнивания с конкретными конфигурациями пучка рентгеновских лучей.
[0038] В примере фиг. 1, детектор 14 излучения установлен на каретку 16 детектора. Каретка 16 детектора установлена на раму 18. В некоторых примерах, каретка 16 детектора выполнена с возможностью перемещаться в z-измерении 20 относительно рамы 18. В другом примере, каретка 16 детектора выполнена с возможностью перемещаться в y-измерении (прямо в страницу, показанную на фиг. 1, или из нее) или в x-измерении 22 относительно рамы 18. Таким образом, в примере фиг. 1 каретка 16 детектора может перемещать детектор 14 излучения в вертикальном направлении, горизонтальном направлении, или в направлении к генератору 12 излучения или от него. В некоторых примерах, генератор 12 излучения установлен на каретку, выполненную с возможностью перемещать генератор 12 излучения в одном или нескольких измерениях x, y, или z. Измерения x, y, или z могут иметь любую ориентацию в реальном пространстве.
[0039] Детектор 14 излучения может быть выровнен в y-измерении и z-измерении 20 с генератором 12 излучения при использовании детектора 14 излучения. В примере фиг. 1 x-измерение 22 параллельно оси 24 (т.е., оси пучка рентгеновских лучей) между генератором 12 излучения и детектором 14 излучения, когда детектор 14 излучения находится в положении для детектирования пучка рентгеновских лучей, генерируемого генератором 12 излучения. Дополнительно, хотя пример фиг. 1 показывает генератор 12 излучения и детектор 14 излучения, установленные на одной и той же раме, генератор 12 излучения и детектор 14 излучения могут быть в других примерах установлены на отдельные рамы. Дополнительно, отдельные рамы могут быть установлены на каретку, обеспечивающую перемещение в х-измерении либо детектора излучения, либо генератора излучения, либо их обоих. Следует понимать, что обсуждение рентгеновских лучей в этом раскрытии может быть, в некоторых примерах, применимо к другим формам излучения, таким как гамма-лучи, нейтронные пучки, и видимый свет.
[0040] В примере фиг. 1, система 10 визуализации содержит систему 30 обработки. Система 30 обработки может содержать вычислительную систему. Иллюстративные типы вычислительных систем могут включать в себя персональные компьютеры, серверные компьютеры, мэйнфреймы, компактные портативные компьютеры, компьютеры специального назначения, и т.д. Как показано в примере фиг. 1, система 30 обработки может включать в себя один или несколько процессоров 31. Каждый из процессоров 31 может содержать один или несколько цифровых сигнальных процессоров (digital signal processor - DSP), микропроцессоров общего назначения, специализированных интегральных схем (application specific integrated circuit - ASIC), матриц программируемых логических вентилей (field-programmable gate array - FPGA) или другие эквивалентные интегральные или дискретные логические схемы. Для легкости объяснения, это раскрытие может описывать действия, выполняемые одним или несколькими процессорами 31, как действия, выполняемые системой 30 обработки. Система 30 обработки, и, следовательно, процессоры 31 оперативно связаны с различными компонентами системы 10 визуализации, так что процессоры 31 выполнены с возможностью выдавать электрические сигналы для таких компонентов и принимать электрические сигналы от таких компонентов. Такие электрические сигналы могут представлять собой команды, данные изображений, данные о состояниях, и т.д. Хотя это раскрытие описывает электрические сигналы, и пример фиг. 1 показывает кабель, соединяющий систему 30 обработки с компонентом в системе 10 визуализации, такие сигналы могут быть оптическими сигналами и/или сигналами, передаваемыми беспроводным способом. В некоторых примерах, система 30 обработки может принимать данные (например, команды) от различных компонентов системы 10 визуализации и отправлять им данные (например, команды) через сеть связи, такую как Интернет или локальная сеть.
[0041] Когда детектор 14 излучения детектирует структуру рентгеновских лучей, излучаемых генератором 12 излучения, детектор 14 излучения может выдавать электрические сигналы, соответствующие структуре рентгеновских лучей. Система 30 обработки может интерпретировать электрические сигналы для генерирования одной или нескольких рентгенограмм.
[0042] Система 10 визуализации может содержать один или несколько механизмов-манипуляторов, выполненных с возможностью перемещать объект относительно генератора 12 излучения и детектора 14 излучения. В некоторых примерах, один или несколько процессоров 31 системы 30 обработки выдают сигналы для перемещения тестового объекта относительно генератора 12 излучения и детектора 14 излучения. Например, в примере фиг. 1 объект может быть установлен (или, иначе, позиционирован) на платформу 26, расположенную между генератором 12 излучения и детектором 14 излучения. В примере фиг. 1, платформа 26 установлена на механизм 28 манипулирования платформой. Механизм 28 манипулирования платформой может перемещать платформу 26 (и, таким образом, объект, установленный на платформу 26) параллельно z-измерению 20. Дополнительно, в некоторых примерах механизм 28 манипулирования платформой может перемещать платформу 26 (и, таким образом, объект, установленный на платформу 26) параллельно y-измерению, которое взаимно ортогонально x-измерению 22 и z-измерению 20. Таким образом, в примере фиг. 1 y-измерение ориентировано прямо в страницу и из нее. В некоторых примерах, механизм 28 манипулирования платформой может одновременно перемещать платформу 26 (и, таким образом, объект, установленный на платформу 26) в z-измерении 20 и y-измерении. Дополнительно, в некоторых примерах механизм 28 манипулирования платформой может наклонять платформу 26.
[0043] Дополнительно, в некоторых примерах механизм 28 манипулирования платформой поворачивает платформу 26 с осью поворота, параллельной z-измерению 20 (т.е., перпендикулярной оси 24 пучка рентгеновских лучей). Таким образом, платформа 26 может быть выполнена с возможностью нести и поворачивать объект. В результате, система 10 визуализации может приобретать изображения, такие как рентгенограммы, под разными углами проекции (т.е., поворотными положениями), когда тестовый объект поворачивается в пучке рентгеновских лучей, генерируемом генератором 12 излучения. В некоторых примерах, система 10 визуализации приобретает изображения под разными углами поворота и обрабатывает эти изображения для сбора этих изображений в трехмерные данные для тестового объекта, например, трехмерную модель тестового объекта. Дополнительно, в некоторых примерах механизм 28 манипулирования платформой поворачивает платформу 26 при одновременном линейном перемещении платформы 26 в z-измерении 20.
[0044] Как показано в примере фиг. 1, система 10 визуализации может содержать коллиматор 40, расположенный между генератором 12 излучения и детектором 14 излучения. Апертура 42 коллиматора 40 позволяет уменьшенному пучку рентгеновских лучей проходить через коллиматор 40 на его пути к детектору 14 излучения. Как описано здесь, система 30 обработки может динамически настраивать размер и форму апертуры 42 при изменении профиля тестового объекта, поворачивающегося на платформе 26. В некоторых примерах, система 10 визуализации включает в себя систему для перемещения коллиматора 40 как единого целого.
[0045] Согласно технологиям этого раскрытия, когда динамическое коллимирование применяется на протяжении всего CT-сканирования, оптимальное коллимирование может быть обеспечено на протяжении всего сканирования посредством создания динамического коллимирования, которое следует за внешней геометрией тестового объекта или конкретной области интереса в тестовом объекте. Это улучшенное коллимирование может улучшить чувствительность сканирования к контрасту, что может обеспечить улучшение в визуализации тонких признаков и разрывов в тестовом объекте, например, образце изделия. При создании системы динамического коллимирования, внешний периметр тестового объекта может быть идентифицирован с использованием программного инструмента для идентификации края тестового объекта с использованием значений пикселов изображения при повороте тестового объекта. Программное средство может тогда автоматически создавать соответствующую позиционную программу, которая связывает положения коллиматорных пластин с каждым поворотным положением платформы 26. Например, в некоторых примерах программа содержит данные, которые преобразуют набор положений коллиматорных пластин в набор поворотных положений платформы. В некоторых примерах, эта программа может быть создана вручную посредством одновременного захвата положений коллимирования и поворотных положений платформы и записи их в командную и управляющую программу. В некоторых примерах, система 30 обработки может генерировать программу посредством захвата выборки положений коллиматорных пластин и поворотных положений, вычисления требуемых промежуточных положений коллиматорных пластин для промежуточных поворотных положений, и записи промежуточных положений коллиматорных пластин и промежуточных поворотных положений в командную и управляющую программу. В некоторых примерах, система 30 обработки генерирует программу посредством захвата выборки положений коллиматорных пластин и поворотных положений. Дополнительно, в этом примере система 30 обработки может определять одно или несколько промежуточных положений коллиматорных пластин для промежуточных поворотных положений и может также принимать указания на пользовательские входные данные для дополнительных комбинаций промежуточных положений коллиматорных пластин и поворотных положений. В этом примере, система 30 обработки может включать в себя определяемые и вводимые промежуточные положения коллиматорных пластин и поворотные положения в программе.
[0046] Для осуществления динамического коллимирования, система 10 визуализации может осуществлять первую фазу сканирования и вторую фазу сканирования. Система 10 визуализации может осуществлять первую фазу сканирования и вторую фазу сканирования последовательно или в режиме чередования. В первой фазе сканирования, система 30 обработки может идентифицировать внешний периметр тестового объекта или части тестового объекта и использовать идентифицированный внешний периметр для определения положений коллиматорных пластин для поворотных положений, используемых во второй фазе сканирования. Система 30 обработки может генерировать первую последовательность изображений во время первой фазы сканирования для тестового объекта. Это раскрытие может относиться к изображениям в первой последовательности изображений, как к изображениям первой фазы. Первая последовательность изображений включает в себя множество изображений. В некоторых примерах, система 30 обработки может генерировать изображения первой фазы на основе структур излучения, детектируемых детектором 14 излучения. В некоторых примерах, изображения первой фазы не используются при генерировании CT-данных для тестового объекта. В некоторых примерах, система 30 обработки может генерировать изображения первой фазы на основе сигналов от камеры, отдельной от детектора 14 излучения, и изображения первой фазы могут быть изображениями на основе видимого света. Каждое изображение первой фазы может соответствовать отличному поворотному положению первой фазы тестового объекта в наборе поворотных положений первой фазы. Например, набор поворотных положений первой фазы может включать в себя положения, где тестовый объект повернут на 0°, 45°, 90°, 135°, 180°, 225°, 270°, и 315°. В другом примере, поворотные положения первой фазы могут включать в себя одно положение для каждого градуса поворота на 360°. Во время первой фазы сканирования, коллиматорные пластины коллиматора 40 могут находиться в одних и тех же положениях, когда тестовый объект находится в каждом из поворотных положений первой фазы. Другими словами, в некоторых примерах коллиматорные пластины коллиматора 40 не перемещаются во время первой фазы сканирования.
[0047] Для каждого соответствующего поворотного положения первой фазы из набора поворотных положений первой фазы, система 30 обработки может автоматически идентифицировать ROI в изображении первой фазы, соответствующем соответствующему поворотному положению первой фазы. В одном примере, система 30 обработки может идентифицировать ROI в изображении первой фазы с использованием алгоритма, который начинается с ограничивающей рамки, которая имеет размер, равный размеру изображения первой фазы. В этом примере, система 30 обработки может постепенно сокращать ограничивающую рамку с левой стороны, периодически проверяя, пересекает ли левая граница ограничивающей рамки край изображения первой фазы. Край является точкой, в которой происходит разрыв в значениях пикселов, обычно соответствующей фактическому краю тестового объекта или структуры в тестовом объекте. После детектирования края, система 30 обработки может переместить левую границу назад влево на несколько пикселов (например, 10 пикселов) для обеспечения так называемого «воздушного зазора» вокруг тестового объекта на левой стороне. Система 30 обработки может затем останавливать процесс настройки левой стороны ограничивающей рамки. В этом примере, система 30 обработки может повторять этот процесс для одного или нескольких из правого, верхнего, и нижнего краев ограничивающей рамки. В некоторых примерах, система 30 обработки может перемещать края ограничивающей рамки независимо или может одновременно перемещать два или более краев ограничивающей рамки. Результирующая ограничивающая рамка очерчивает ROI в изображении первой фазы.
[0048] В некоторых примерах, ROI в изображении меньше части изображения, соответствующего тестовому объекту. Например, тестовый объект может включать в себя часть, такую как сварной шов или клапан, которая должна быть оценена. В этом примере, система 30 обработки может идентифицировать области в изображениях первой фазы, которые соответствуют этой части. В некоторых примерах, для идентификации областей в изображениях первой фазы, которые соответствуют этой части, сначала может быть обучена модель машинного обучения для распознавания этой части в других изображениях первой фазы одного и того же тестового объекта. В таких примерах, система 30 обработки может затем применять модель машинного обучения для идентификации областей в изображениях первой фазы, соответствующих этой части. Альтернативно или дополнительно, система 30 обработки может принимать указания на пользовательские входные данные, которые идентифицируют область в изображении первой фазы, которая соответствует этой части. В этих примерах, система 30 обработки может определять, как следует модифицировать ROI на основе пользовательских входных данных, известных размеров этой части, известной информации о положении этой части в тестовом объекте, расстояния до детектора 14 излучения от коллиматора 40, и расстояния до генератора 12 излучения от коллиматора 40. В некоторых примерах, система 30 обработки может идентифицировать ROI на основе модели автоматизированного проектирования (Computer Assisted Design - CAD) этой части, объединенной с моделью системы 10 визуализации, которая также моделирует конус излучения, детектор 14 излучения, коллиматорные пластины 44 и пересечение конуса излучения с ROI и соответствующими положениями пластин. Эта модель может быть использована для программирования положений коллимирования независимо от других способов.
[0049] В некоторых примерах, система 10 визуализации может осуществлять первую фазу сканирования в качестве части процесса оценивания тестового объекта. Например, система 10 визуализации может использовать изображения первой фазы для генерирования томографических данных, используемых для фактического оценивания тестового объекта. В таких примерах, система 10 визуализации может использовать изображения первой фазы для генерирования ROI-данных, указывающих на ROI. Как описано ниже, система 10 визуализации может затем использовать сгенерированные ROI-данные в управляющей программе для управления положениями коллиматорных пластин 44 во время оценивания других тестовых объектов того же типа. Таким образом, в таких примерах система 10 визуализации может не осуществлять первую фазу сканирования снова для каждого тестового объекта того же типа.
[0050] Как упомянуто выше, излучение излучается генератором 12 излучения и проходит через апертуру 42 коллиматора 40. В примере фиг. 1, коллиматор 40 расположен между генератором 12 излучения и тестовым объектом. Дополнительно, в примере фиг. 1 тестовый объект расположен между коллиматором 40 и детектором 14 излучения. Коллиматор 40 включает в себя множество коллиматорных пластин 44А, 44В, которые подвижны с возможностью изменять размер и форму апертуры 42 коллиматора 40. Для каждого соответствующего поворотного положения первой фазы система 30 обработки может определять, на основе идентифицированной ROI в изображении первой фазы для соответствующего поворотного положения первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы. Например, система 30 обработки может определять положения коллиматорных пластин для соответствующего поворотного положения первой фазы на основе размера и положения идентифицированной ROI в изображении первой фазы, соответствующем соответствующему поворотному положению первой фазы, и также на основе расстояния до коллиматора 40 от детектора 14 излучения и расстояния до коллиматора 40 от генератора 12 излучения. В некоторых примерах, система 30 обработки может определять положения коллиматорных пластин отчасти с использованием справочной таблицы или формулы, которая устанавливает соответствие ширины ROI ширине зазора между горизонтальными перемещающимися коллиматорными пластинами; и справочной таблицы, которая устанавливает соответствие высоты ROI высоте зазора между вертикальными перемещающимися коллиматорными пластинами. Дополнительно, система 30 обработки может определять положения коллиматорных пластин отчасти с использованием справочной таблицы или формулы, которая устанавливает соответствие верхнего (или нижнего) края ROI положению верхней (или нижней) коллиматорной пластины; система 30 обработки может также использовать справочную таблицу или формулу, которая устанавливает соответствие левого (или правого) края ROI положению левой (или правой) коллиматорной пластины. На основе ширин зазоров и положений верхней (или нижней) и левой (или правой) коллиматорных пластин система 30 обработки может определять положения всех четырех коллиматорных пластин коллиматора 40 для соответствующего поворотного положения. В этом примере, справочная таблица или формула могут быть определены на основе факторов, таких как расстояние до коллиматора 40 от детектора 14 излучения и расстояние до коллиматора 40 от генератора 12 излучения.
[0051] Таким образом, в качестве части идентификации ROI в изображении первой фазы, соответствующем конкретному поворотному положению первой фазы, система 30 обработки может идентифицировать местоположения в изображении первой фазы, которые соответствуют краям части (например, участка или всего) оцениваемого тестового объекта. Например, система 30 обработки может выполнить процесс, который идентифицирует пикселы, которые соответствуют краям части тестового объекта. Дополнительно, система 30 обработки может определять прямоугольную ограничивающую рамку, которая содержит идентифицированные местоположения. Дополнительно, в качестве части определения положений коллиматорных пластин для поворотного положения первой фазы, система 30 обработки может определять положения коллиматорных пластин для поворотного положения первой фазы таким образом, чтобы проекция краев апертуры коллиматора 40 на детектор 14 излучения соответствовала определенной прямоугольной ограничивающей рамке. Проекция краев может считаться силуэтом краев, проецируемых на детектор 14 излучения. Например, этот силуэт может быть образован лучами из генератора 12 излучения, которые касаются краев и продолжаются по прямым линиям к детектору 14 излучения. Ограничивающая рамка, соответствующая проекции краев, может быть наименьшей ограничивающей рамкой, которая содержит эту проекцию, с необязательным воздушным зазором на одной или нескольких сторонах. В другом примере, система 30 обработки может использовать модель машинного обучения, которая выполнена с возможностью идентифицировать ограничивающие рамки вокруг ROI в изображениях, таких как рентгенограммы.
[0052] Дополнительно, система 30 обработки может определять положения коллиматорных пластин для набора из двух или более поворотных положений второй фазы. Поворотные положения второй фазы могут быть такими же, как поворотные положения первой фазы, или могут быть отличными от поворотных положений первой фазы. Таким образом, в некоторых примерах поворотные положения второй фазы включают в себя большее или меньшее количество поворотных положений, чем набор поворотных положений первой фазы. В некоторых примерах, набор поворотных положений второй фазы включает в себя одно или несколько поворотных положений, которые отсутствуют в наборе поворотных положений первой фазы. В примерах, где поворотные положения второй фазы являются такими же, как поворотные положения первой фазы, система 30 обработки может просто определять, что положения коллиматорных пластин для поворотных положений второй фазы являются такими же, как положения коллиматорных пластин для поворотных положений первой фазы.
[0053] В примерах, где поворотное положение второй фазы отсутствует в наборе поворотных положений первой фазы, система 30 обработки может использовать одну или несколько формул для определения положений коллиматорных пластин для поворотного положения второй фазы. Например, если поворотное положение второй фазы находится на полпути между двумя поворотными положениями первой фазы, система 30 обработки может определять, что положения коллиматорных пластин для поворотного положения второй фазы находятся на полпути между положениями коллиматорных пластин для двух поворотных положений первой фазы. В некоторых примерах, система 30 обработки может использовать нелинейный подход для определения положений коллиматорных пластин для поворотных положений второй фазы. Например, в таких примерах, система 30 обработки может вычислять положения коллиматорных пластин для поворотного положения второй фазы на основе дуги между положениями коллиматорных пластин, используемыми для двух поворотных положений первой фазы.
[0054] Дополнительно, во второй фазе сканирования тестового объекта, система 10 визуализации может генерировать вторую последовательность изображений на основе структур излучения, детектируемых детектором 14 излучения. Это раскрытие может относиться к изображениям во второй последовательности изображений, как к изображениям второй фазы. Вторая последовательность изображений может включать в себя большее, меньшее, или то же самое количество изображений, что и первая последовательность изображений. Каждое соответствующее изображение второй фазы может быть рентгенограммой и может соответствовать отличному поворотному положению в наборе поворотных положений второй фазы. Другими словами, для каждого соответствующего поворотного положения второй фазы из набора поворотных положений второй фазы система 10 визуализации может генерировать соответствующее изображение второй фазы во второй последовательности изображений. Соответствующее изображение второй фазы может быть сгенерировано на основе структур излучения, детектируемых детектором 14 излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины 44 находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы. В качестве части генерирования второй последовательности изображений, система 30 обработки может управлять положениями коллиматорных пластин 44 таким образом, чтобы коллиматорные пластины 44 имели положения коллиматорных пластин, определенные ля поворотных положений второй фазы.
[0055] Поскольку форма и положение ROI могут изменяться при повороте тестового объекта, форма и положение апертуры 42 коллиматора 40 могут изменяться во время второй фазы сканирования при повороте тестового объекта. Таким образом, часть детектора 14 излучения, попадающая в тень коллиматора 40, может изменяться для каждого из поворотных положений второй фазы, особенно если тестовый объект асимметричен относительно оси поворота для первого и второго наборов поворотных положений. В результате, полезная область данных изображения в каждом из изображений второй фазы может изменяться. Полезная область данных изображения в изображении второй фазы соответствует области детектора 14 излучения, не находившейся в тени коллиматора 40 при генерировании изображения второй фазы. Полезная область изображения может включать в себя всю область детектора или подобласть области детектора, которая соответствует ROI. В некоторых примерах, система 30 обработки может заменять пикселы изображения второй фазы, которые находятся за пределами полезной области (т.е., в коллимированной области) изображения второй фазы заменяющим пикселом. Например, система 30 обработки может заменять коллимированную область изображения второй фазы белыми или черными пикселами. В некоторых примерах, система 30 обработки может применять обрезание размера изображения для уменьшения размера при запоминании для потенциального улучшения передачи данных и уменьшения времени восстановления. Система 30 обработки может применять программные средства для обеспечения положений пикселов детектора изменяющихся ROI обрезанных рентгенограмм ROI.
[0056] В некоторых примерах, система 10 визуализации генерирует каждое из изображений первой фазы перед генерированием любого из изображений второй фазы. Например, в этом примере система 10 визуализации может генерировать изображения первой фазы при повороте тестового объекта на протяжении первого полного оборота и может генерировать изображения второй фазы при повороте тестового объекта на протяжении второго полного оборота. В других примерах, система 10 визуализации может генерировать изображения первой фазы и изображения второй фазы в режиме чередования. Таким образом, в некоторых таких примерах система 10 визуализации может генерировать все изображения первой фазы и все изображения второй фазы за единственный оборот тестового объекта. Например, система 10 визуализации может генерировать изображение первой фазы в то время, когда тестовый объект находится в первом поворотном положении, определять положения коллиматорных пластин для первого поворотного положения, устанавливать коллиматорные пластины в определенные положения коллиматорных пластин для первого поворотного положения, генерировать изображение второй фазы в то время, когда тестовый объект находится в первом поворотном положении, и затем поворачивать тестовый объект в следующее поворотное положение. В этом примере, система 10 визуализации может повторять эти этапы для следующего поворотного положения (т.е., генерировать изображение первой фазы в то время, когда тестовый объект находится во втором поворотном положении, определять положения коллиматорных пластин для второго поворотного положения, устанавливать коллиматорные пластины в определенные положения коллиматорных пластин для второго поворотного положения, генерировать изображение второй фазы в то время, когда тестовый объект находится во втором поворотном положении, и затем поворачивать тестовый объект в следующее поворотное положение).
[0057] В этом примере, система 30 обработки может вычислять, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта. Система 30 обработки может вычислять томографические данные согласно любым известным технологиям для вычисления томографических данных на основании последовательности рентгенограмм, известных в данной области техники.
[0058] Фиг. 2А является концептуальным чертежом иллюстративной системы 10 визуализации, когда тестовый объект 200 находится в первом поворотном положении во время второй фазы сканирования, согласно одной или нескольким технологиям этого раскрытия. В примере фиг. 2А, коллиматор 40 коллимирует полный пучок 15 рентгеновских лучей. Дополнительно, в примере фиг. 2А коллиматорные пластины 44А, 44В расположены таким образом, что апертура 42 достаточно широка для прохождения внешних краев коллимированного пучка 202 рентгеновских лучей, который проходит через апертуру 42, через относительно малую область (т.е., «воздушный зазор») около внешних краев тестового объекта 200.
[0059] Фиг. 2В является концептуальным чертежом иллюстративных положений пластин коллиматора 40, когда тестовый объект 200 находится в первом поворотном положении, показанном на фиг. 2А. Фиг. 2В является изображением с перспективы центральной точки излучения полного пучка 15 рентгеновских лучей фиг. 2А. В примере фиг. 2В, коллиматор 40 имеет четыре коллиматорные пластины 44A, 44B, 44C, и 44D (совокупно, «коллиматорные пластины 44»). Коллиматорные пластины 44C и 44D не показаны в примере фиг. 2А из-за перспективы фиг. 2А. В примере фиг. 2В, коллиматорные пластины 44А и 44В ориентированы вертикально, и коллиматорные пластины 44C и 44D ориентированы горизонтально. Дополнительно, в примере фиг. 2В, коллиматорные пластины 44C и 44D находятся ближе к генератору 12 излучения, чем коллиматорные пластины 44А и 44В. Следовательно, в примере фиг. 2А, коллиматорные пластины 44А и 44В частично заслонены коллиматорными пластинами 44C и 44D.
[0060] Коллиматорные пластины 44 расположены таким образом, что воздушный зазор 204 возникает вдоль одной или нескольких сторон тестового объекта 200. Воздушный зазор 204 может позволять рентгеновским лучам, проходящим через апертуру 42 коллиматора 40, достигать детектора 14 излучения, не проходя через тестовый объект 200. В некоторых примерах воздушный зазор отсутствует на всех сторонах тестового объекта 200.
[0061] Фиг. 2С является концептуальным чертежом иллюстративной системы визуализации, когда тестовый объект находится во втором поворотном положении во время второй фазы сканирования, согласно одной или нескольким технологиям этого раскрытия. В примере фиг. 2С, тестовый объект 200 повернут на 90° относительно первого поворотного положения тестового объекта 200, показанного на фиг. 2А. В других примерах, тестовый объект 200 может быть повернут на другие углы. Таким образом, самый узкий край тестового объекта 200 обращен к генератору 12 излучения. Соответственно, коллиматорные пластины 44А, 44В изменили свое положение для уменьшения размера апертуры 42, в результате чего коллимированный пучок 202 рентгеновских лучей сузился.
[0062] Фиг. 2D является концептуальным чертежом иллюстративных положений пластин коллиматора 40, когда тестовый объект 200 находится во втором поворотном положении, показанном на фиг. 2С. Фиг. 2D является изображением с той же перспективы, что и фиг. 2В. Поскольку тестовый объект 200 повернулся, более узкая лицевая поверхность тестового объекта 200 обращена к генератору 12 излучения. Как показано в примере фиг. 2D, коллиматорные пластины 44С и 44D остаются в тех же самых положениях, но система 30 обработки переместила коллиматорные пластины 44А и 44В ближе друг к другу.
[0063] Фиг. 3А показывает первый иллюстративный тестовый объект 300 в первом поворотном положении. Фиг. 3В показывает тестовый объект 300 фиг. 3А во втором поворотном положении, отличном от первого поворотного положения. Фиг. 3А и фиг. 3В показывают пример тестового объекта, который имеет асимметричную геометрию, при которой может быть полезно динамическое коллимирование при выполнении CT-сканирований. В примере фиг. 3А, ROI 302 соответствует части тестового объекта 300, которая меньше тестового объекта 300. В примере фиг. 3В, ROI 304 соответствует той же самой части тестового объекта 300. Как показано на фиг. 3А и 3В, размер и форма ROI может изменяться от изображения к изображению при повороте тестового объекта 300.
[0064] Фиг. 4А показывает иллюстративную рентгенограмму 500 тестового объекта 502 в отсутствие коллимирования. На фиг. 4А, фиг. 4В, и фиг. 4С тестовый объект может быть тестовым объектом 300, показанным на фиг. 3А и фиг. 3В. Фиг. 4В показывает иллюстративную рентгенограмму 504 тестового объекта 502 фиг. 4А в случае стандартного, нединамического CT-коллимирования в 0-градусном поворотном положении. Другими словами, рентгенограмма 504 сгенерирована, когда коллиматорные пластины не изменяли положение на основе поворотного положения тестового объекта 502. Таким образом, в то время как положения коллиматорных пластин, используемые в рентгенограмме 504, могут быть оптимальными в этом 0-градусном поворотном положении, когда тестовый объект 502 поворачивается на 90°, имеется значительное пространство, когда тестовый объект 502 находится в 90-градусном поворотном положении, показанном на фиг. 4Е. Фиг. 4С показывает иллюстративную рентгенограмму 506 тестового объекта 502 фиг. 4А-4В в случае динамического CT-коллимирования в 0-градусном поворотном положении согласно одной или нескольким технологиям этого раскрытия. Рентгенограммы фиг. 4В и фиг. 4С являются одинаковыми вследствие положений пластин коллиматора, соответствующих технологиям стандартного, нединамического коллимирования, основанных на самой широкой части тестового объекта в любом поворотном положении тестового объекта. Как показано на фиг. 4А-4С, использование результатов коллимирования в рентгенограммах 504 и 506 привело к лучшему контрасту изображения и лучшей четкости рентгенографического края тестового объекта, чем в рентгенограмме 500.
[0065] Фиг. 4D показывает иллюстративную рентгенограмму 508 тестового объекта 502 фиг. 4А-4С в отсутствие коллимирования в 90-градусном поворотном положении. Фиг. 4Е показывает иллюстративную рентгенограмму тестового объекта 502 фиг. 4А-4D в случае стандартного, нединамического СТ-коллимирования в 90-градусном поворотном положении. Фиг. 4F показывает иллюстративную рентгенограмму тестового объекта 502 фиг. 4А-4Е в случае динамического CT-коллимирования в 90-градусном поворотном положении согласно одной или нескольким технологиям этого раскрытия. 90-градусное поворотное положение находится под углом 90 градусов от поворотного положения тестового объекта 502, показанного на фиг. 4A-4C. В примере фиг. 4F, коллимирование непрерывно настраивалось от 0-градусного положения с максимальным отверстием до 90-градусного минимального положения с отверстием, немного большим, чем наименьшая проецируемая область интереса.
[0066] Поскольку технологии стандартного, нединамического коллимирования не настраивают положения коллиматорных пластин на основе поворотного положения тестового объекта 502, положения коллиматорных пластин являются одинаковыми на фиг. 4В и фиг. 4Е, несмотря на отличное поворотное положение тестового объекта 502. Однако, согласно технологиям динамического коллимирования этого раскрытия, положение коллиматорных пластин изменяется на основе поворотного положения тестового объекта 502 в рентгенограмме 512. Как можно увидеть на фиг. 4D, 4E, и 4F, контраст изображения и четкость рентгенографического края тестового объекта в рентгенограмме 510 являются большими, чем контраст рентгенограмме 508. Однако, контраст изображения и четкость рентгенографического края тестового объекта в рентгенограмме 512 все же являются большими, чем в рентгенограмме 510, вследствие динамически изменяемых положений коллиматорных пластин. Дополнительно, яркость ROI в рентгенограммах 508 и 510 может быть большей, и края тестового объекта 502 могут начать «размываться» в рентгенограмме 510 по сравнению со случаем, когда динамическое коллимирование используется в генерировании рентгенограммы 512, несмотря на применение одинаковых экспозиционных параметров. Уменьшенный уровень яркости рентгенограммы 512 и увеличение контраста изображения и четкости рентгенографического края тестового объекта прямо связаны с уменьшением рассеиваемого излучения при применении динамического коллимирования.
[0067] Фиг. 5 является блок-схемой последовательности операций, показывающей первое иллюстративное функционирование системы 10 визуализации согласно одной или нескольким технологиям этого раскрытия. В других примерах согласно технологиям этого раскрытия может выполняться большее, меньшее количество действий, или другие действия по сравнению с фиг. 5; или действия могут выполняться в других порядках или параллельно.
[0068] В примере фиг. 5, система визуализации (например, система 10 визуализации фиг. 1, система 700 визуализации фиг. 7, система 800 визуализации фиг. 8) может осуществлять первую фазу сканирования для тестового объекта (например, тестового объекта 200, 300, 502). Во время первой фазы сканирования, система 10 визуализации может, для каждого соответствующего поворотного положения первой фазы из набора из двух или более поворотных положений первой фазы, сгенерировать (602) соответствующее изображение первой фазы в первой последовательности изображений. Соответствующее изображение первой фазы генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы. В некоторых примерах, каждое изображение в первой последовательности изображений является рентгенограммой. В некоторых примерах, вместо рентгенограмм первая последовательность изображений может включать в себя фотографии на основе видимого света, захватываемые вспомогательными оптическими визуализирующими компонентами системы 10 визуализации. Каждое изображение в первой последовательности изображений может соответствовать отличному поворотному положению тестового объекта в наборе поворотных положений первой фазы.
[0069] Дополнительно, в примере фиг. 7, для каждого соответствующего поворотного положения первой фазы из набора поворотных положений первой фазы, система визуализации может идентифицировать (604) ROI (например, ROI 302, 304 (фиг. 3)) в соответствующем изображении первой фазы. Эта ROI соответствует части оцениваемого тестового объекта. Например, ROI может соответствовать части тестового объекта или всему тестовому объекту. В некоторых примерах, система 30 обработки автоматически идентифицирует ROI, как описано в других местах этого раскрытия. Например, система 30 обработки может идентифицировать ROI посредством отслеживания краев в изображениях.
[0070] Дополнительно. для каждого соответствующего поворотного положения первой фазы из набора поворотных положений первой фазы, система визуализации может определять (606), на основе идентифицированной ROI в соответствующем изображении первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы. Система визуализации может определять положения коллиматорных пластин для соответствующего поворотного положения первой фазы согласно любым примерам, описанным в других местах этого раскрытия. Излучение излучается генератором излучения (например, генератором 12 излучения) и проходит через апертуру коллиматора (например, коллиматора 40). Коллиматор расположен между генератором излучения и детектором излучения. Например, коллиматор может быть расположен между генератором излучения и тестовым объектом. Тестовый объект может быть расположен между коллиматором и детектором излучения. Коллиматор включает в себя множество коллиматорных пластин (например, коллиматорных пластин 44), которые подвижны с возможностью изменять размер и форму апертуры коллиматора.
[0071] Дополнительно, в примере фиг. 5, для каждого соответствующего поворотного положения второй фазы в наборе из двух или более поворотных положений второй фазы, система визуализации может определять (608), на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для соответствующего поворотного положения второй фазы. В некоторых примерах, набор поворотных положений первой фазы и набор поворотных положений второй фазы состоят из одних и тех же поворотных положений. В других примерах, набор поворотных положений второй фазы включает в себя большее, меньшее количество поворотных положений, или другие поворотные положения по сравнению с набором поворотных положений первой фазы. В некоторых примерах, тестовый объект асимметричен относительно оси поворота для поворотных положений первой фазы и поворотных положений второй фазы. Таким образом, может потребоваться изменять положения коллиматорных пластин при повороте тестового объекта.
[0072] Когда соответствующее поворотное положение второй фазы является таким же, как поворотное положение первой фазы в наборе поворотных положений первой фазы, система визуализации может определять, что положения коллиматорных пластин для соответствующего поворотного положения второй фазы являются такими же, как положения коллиматорных пластин для поворотного положения первой фазы. Когда соответствующее поворотное положение второй фазы является отличным от любого поворотного положения первой фазы в наборе поворотных положений первой фазы, система визуализации может определять положения коллиматорных пластин для соответствующего поворотного положения второй фазы на основе положений коллиматорных пластин для двух или более поворотных положений первой фазы, как описано в других местах этого раскрытия.
[0073] Система визуализации может генерировать (610) соответствующее изображение второй фазы во второй последовательности изображений. Соответствующее изображение второй фазы генерируется на основе структур излучения, детектируемых детектором излучения (например, детектором 14 излучения) в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы. Соответствующее изображение второй фазы может быть рентгенограммой. В качестве части генерирования изображения второй фазы, система визуализации может управлять положениями коллиматорных пластин на основе положений коллиматорных пластин для соответствующего поворотного положения второй фазы. Для физического управления коллиматорными пластинами, система обработки системы визуализации (например, система 30 обработки) может прямо или непрямо отправлять сигналы двигателям, которые приводят в движение коллиматорные пластины. Как упомянуто выше, в некоторых примерах детектор излучения может включать в себя детектор рентгеновских лучей на основе LDA. В таких примерах может потребоваться, чтобы коллиматор включал в себя только две коллиматорные пластины, выполненные с возможностью перемещаться в направлении, перпендикулярном продольной оси детектора рентгеновских лучей на основе LDA.
[0074] Затем, система визуализации может вычислять (614), на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта. Система визуализации может вычислять томографические данные согласно любым общеизвестным технологиям для вычисления томографических данных на основании последовательности рентгенограмм или синограмм, известным в данной области техники, например, но не только, технологии фильтрованной обратной проекции (filtered back projection - FBP), технологии итерационного восстановления (iterative reconstruction - IR) и технологии восстановления Фурье.
[0075] Дополнительно, примеры, обеспеченные выше, относятся к коллиматору (например, коллиматору 40), имеющему единственную апертуру. Однако, в некоторых примерах коллиматор может иметь две или более апертур в системе с единственным генератором 12 излучения и единственным детектором 14 излучения. В такой системе, каждая из апертур может быть использована для одновременного оценивания отличного тестового объекта. Система 30 обработки может независимо настраивать размеры и формы каждой из апертур. В таких примерах, система 30 обработки может быть выполнена с возможностью независимо изменять положения каждой из коллиматорных пластин. В другом варианте осуществления, две или более коллиматорных пластин могут быть связаны для совместного перемещения.
[0076] В некоторых примерах, система визуализации (например, система 10, 700, 800 визуализации) может выполнять действия фиг. 5 автоматически для одного или нескольких тестовых объектов без вмешательства человека. В некоторых таких примерах, конвейерный механизм может автоматически загружать тестовые объекты в систему визуализации. Дополнительно, в некоторых примерах, где должны оцениваться множественные тестовые объекты одного типа, система визуализации может осуществлять первую фазу (т.е., действия (602), (604), и (606)) для одного из тестовых объектов (например, первого возникающего тестового объекта) для определения (608) положений коллиматорных пластин для поворотных положений первой фазы и для определения положений коллиматорных пластин для поворотных положений второй фазы. В таких примерах, система визуализации может повторно использовать информацию о положениях коллиматорных пластин для поворотных положений второй фазы для генерирования изображений второй фазы других тестовых объектов без повторения действий (602), (604), (606), и (608) для других тестовых объектов. В некоторых примерах, рассматриваемый тестовый объект может быть таким же физическим тестовым объектом или двумя разными физическими тестовыми объектами одного типа (например, с одинаковой формой, размерами, составом, и т.д.).
[0077] Фиг. 6 является блок-схемой последовательности операций, показывающей второе иллюстративное функционирование системы визуализации согласно одной или нескольким технологиям этого раскрытия. В отличие от иллюстративного функционирования фиг. 5, функционирование фиг. 6 может генерировать изображения, используемые для вычисления томографических данных, в единственной фазе. В некоторых примерах, каждое из изображений является рентгенограммой.
[0078] Конкретно, в примере фиг. 6, система 10 визуализации может сгенерировать (650) текущее изображение. Когда текущее изображение является первым возникающим изображением в наборе изображений, используемых для вычисления томографических данных, система 10 визуализации может сгенерировать текущее изображение в то время, когда тестовый объект находится первом возникающем поворотном положении в наборе поворотных положений. В некоторых примерах, система 10 визуализации может генерировать первое возникающее изображение в то время, когда апертура коллиматора находится в своей самом широкой конфигурации.
[0079] Затем, система 10 визуализации может идентифицировать (652) ROI в текущем изображении. Как и ранее, ROI может соответствовать части оцениваемого тестового объекта, например, части тестового объекта или всему оцениваемому тестовому объекту. В некоторых примерах, границы ROI в текущем изображении соответствуют внешним краям тестового объекта, показанным в текущем изображении, с воздушным зазором из нескольких пикселов на одной или нескольких сторонах. В некоторых примерах, система 10 визуализации автоматически идентифицирует ROI так, как описано в примерах, обеспеченных в других местах этого раскрытия. В некоторых примерах, вместо использования текущего изображения для идентификации ROI в текущем изображении, система 10 визуализации может использовать информацию (например, размеры тестового объекта) в CAD-файле для тестового объекта для определения ROI.
[0080] В одном примере, после определения ROI в первом возникающем изображении, система 10 визуализации может определять положения коллиматорных пластин, соответствующие ROI в первом возникающем изображении. В этом примере, система 10 визуализации может затем изменять положения коллиматорных пластин в соответствии с определенными положениями коллиматорных пластин. Дополнительно, в этом примере система 10 визуализации может затем восстановить изображение для первого возникающего поворотного положения. В этом примере, система 10 визуализации может использовать это восстановленное изображение при вычислении томографической модели части тестового объекта.
[0081] В примере фиг. 6, система 10 визуализации может затем определять (654), на основе идентифицированной ROI в изображении, положения коллиматорных пластин для следующего поворотного положения в наборе поворотных положений. В некоторых примерах, для определения положений коллиматорных пластин для следующего поворотного положения, система 10 визуализации может определять ожидаемую ROI для следующего поворотного положения. Система 10 визуализации может определять ожидаемую ROI для следующего поворотного положения на основе размера воздушного зазора в текущем изображении. Например, для каждой стороны ограничивающей рамки, определяющей ROI (или стороны в подмножестве сторон ограничивающей рамки), если воздушный зазор меньше первого порогового размера (например, меньше данного числа пикселов), то система 10 визуализации перемещает эту сторону вовне относительно тестового объекта. Напротив, если воздушный зазор больше второго порогового размера (например, больше данного числа пикселов), то система 10 визуализации перемещает эту сторону вовнутрь относительно тестового объекта. Первый и второй пороговые размеры могут быть одинаковыми или разными числами. Кроме того, в некоторых примерах могут быть разные первый и второй пороги для разных сторон ограничивающей рамки. В некоторых примерах, величина, на которую система 10 визуализации перемещает сторону вовне или вовнутрь, может быть фиксированным числом. В некоторых примерах, система 10 визуализации может определять величину, на которую система 10 визуализации перемещает сторону вовне или вовнутрь, на основе разницы в размере воздушного зазора на этой стороне в предыдущих двух изображениях. В некоторых примерах, система 10 визуализации может определять величину, на которую система 10 визуализации перемещает сторону вовне или вовнутрь, на основе предопределенных данных, указывающих на размеры тестового объекта и на то, сколько градусов угла поворота попадает между текущим поворотным положением и следующим поворотным положением. После определения ROI для следующего поворотного положения, система 10 визуализации может определять положения коллиматорных пластин для следующего поворотного положения на основе математического соотношения между положениями коллиматорных пластин и местоположением и размером ROI для следующего поворотного положения так же, как описано в других местах этого раскрытия.
[0082] Затем, система 10 визуализации может поворачивать (656) тестовый объект в следующее поворотное положение в наборе поворотных положений, изменять положения коллиматорных пластин на положения коллиматорных пластин для следующего поворотного положения, и генерировать новое текущее изображение. Дополнительно, система 10 визуализации может определять, существуют ли (658) какие-либо дополнительные поворотные положения в наборе поворотных положений. В ответ на определение того, что дополнительные поворотные положения в наборе поворотных положений существуют (ветвь «Да» действия 658), система 10 визуализации может повторить действия (652) - (658) в отношении нового текущего изображения. Иначе, в ответ на определение того, что никакие дополнительные поворотные положения в наборе поворотных положений не существуют (ветвь «Нет» действия 658), система 10 визуализации может вычислить (660), на основе изображений, томографическую модель части оцениваемого тестового объекта. Система 10 визуализации может вычислять томографическую модель так, как описано в других местах этого раскрытия.
[0083] Фиг. 7 является схематичным чертежом иллюстративной системы 700 визуализации согласно одной или нескольким технологиям этого раскрытия. В большинстве отношений система 700 визуализации подобна системе 10 визуализации (фиг. 1). Таким образом, части, пронумерованные на фиг. 7 теми же ссылочными позициями, что и части на фиг. 1, имеют те же самые функции и могут быть реализованы тем же самым образом, что и эти части на фиг. 1.
[0084] В некоторых примерах, сам тестовый объект может рассеивать рентгеновские лучи, которые прошли через апертуру 42 коллиматора 40. Рентгеновские лучи, рассеянные в тестовом объекте, могут, в свою очередь, отражаться или рассеиваться от других областей объекта или компонентов системы 700 визуализации перед попаданием в детектор 14 излучения. Таким образом, рентгеновские лучи, рассеянные от тестового объекта, могут уменьшать контраст в любой результирующей рентгенограмме.
[0085] Соответственно, в примере фиг. 7, система 700 визуализации снабжена вторым коллиматором 702, который расположен на стороне детектора тестового объекта 704 с коллиматором 702. Коллиматор 702 может быть синхронизирован и коллиматором 40 стороны трубки или может перемещаться и управляться независимо от коллиматора 40 стороны трубки. Коллиматор 702 имеет множество коллиматорных пластин, включающее в себя коллиматорные пластины 710A, 710B. Другие коллиматорные пластины коллиматора 702 не показаны в примере фиг. 7 из-за перспективы фиг. 7. В некоторых примерах, система 700 визуализации может включать в себя систему для перемещения коллиматора 702 как единого целого. Это может быть полезно, поскольку в некоторых примерах может быть предпочтительным поддерживать положение коллиматора 702 как можно более близким к тестовому объекту 704 при повороте тестового объекта 704.
[0086] Вспомогательное коллимирование, показанное на фиг. 7, может уменьшить рассеянное излучение 706, инициируемое тестовым объектом 704, которое заканчивается в области интереса на детекторе 14 излучения. Это вспомогательное динамическое коллимирование может еще больше улучшить контраст изображения и четкость рентгенографического края тестового объекта посредством уменьшения этого вторичного рассеяния от тестового объекта. Поскольку коллиматор 702 синхронизирован с коллиматором 40, изменения в размере, форме, и положении апертуры 42 приводят к соответствующим изменениям в размере, форме, и положении апертуры 708 коллиматора 702. Например, если апертура 42 становится шире горизонтально, то апертура 708 также становится шире горизонтально. В некоторых примерах, система 30 обработки может определять угол θ таким образом, чтобы tg(θ) был равен ½ ширины (или высоты) апертуры 42, деленой на расстояние от апертуры 42 до генератора 12 излучения. В этом примере, система 30 обработки может определять ширину (или высоту) апертуры 708 как 2*tg(θ)*(расстояние от апертуры 42 до генератора 12 излучения). В других примерах, система 30 обработки может управлять положениями коллиматорных пластин коллиматора 702 независимо от положений коллиматорных пластин коллиматора 40.
[0087] Таким образом, коллиматор, упомянутый на фиг. 5, может считаться первым коллиматором, положения коллиматорных пластин для соответствующего поворотного положения второй фазы могут считаться первыми положениями коллиматорных пластин для соответствующего поворотного положения второй фазы. Дополнительно, продолжая действия фиг. 5, система 700 визуализации может, для соответствующего поворотного положения второй фазы из набора поворотных положений второй фазы, определять, на основе положений коллиматорных пластин для поворотных положений первой фазы, вторые положения коллиматорных пластин для соответствующего поворотного положения второй фазы. Например, система 700 визуализации может определять вторые положения коллиматорных пластин для соответствующего поворотного положения второй фазы, как описано в предыдущем абзаце. Дополнительно, продолжая действия фиг. 5, система 700 визуализации может генерировать соответствующее изображение второй фазы на основе структур излучения, детектируемых детектором 14 излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы в то время, когда коллиматорные пластины первого коллиматора (т.е., коллиматора 40) находятся в первых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы и в то время, когда коллиматорные пластины 710 второго коллиматора (т.е., коллиматора 702) находятся во вторых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы.
[0088] Фиг. 8 является схематичным чертежом иллюстративной системы 800 визуализации согласно одной или нескольким технологиям этого раскрытия. В большинстве отношений система 800 визуализации подобна системе 10 визуализации (фиг. 1) и системе 700 визуализации (фиг. 7). Таким образом, части, пронумерованные на фиг. 8 теми же ссылочными позициями, что и части на фиг. 1 и фиг. 7, имеют те же самые функции и могут быть реализованы тем же самым образом, что и эти части на фиг. 1 и фиг. 7.
[0089] В примере фиг. 8, система 800 визуализации снабжена коллиматором 802, который расположен на стороне детектора тестового объекта 704 с коллиматором 802. Другими словами, коллиматор 802 расположен между тестовым объектом 704 и детектором 14 излучения. Однако, система 800 визуализации не включает в себя коллиматор, такой как коллиматор 40, расположенный между тестовым объектом 704 и генератором 12 излучения. Подобно коллиматору 702, коллиматор 802 имеет множество коллиматорных пластин, включающее в себя коллиматорные пластины 810A, 810B. Другие коллиматорные пластины коллиматора 802 не показаны в примере фиг. 8 из-за перспективы фиг. 8. В некоторых примерах, система 800 визуализации может включать в себя систему для перемещения коллиматора 802 как единого целого. Это может быть полезно, поскольку в некоторых примерах может быть предпочтительным поддерживать положение коллиматора 802 как можно более близким к тестовому объекту 704. Коллиматор 802 может обеспечивать преимущества, подобные преимуществам, описанным выше в отношении коллиматора 702 на фиг. 7.
[0090] Хотя технологии этого раскрытия были описаны со ссылкой на рентгеновские лучи, технологии этого раскрытия могут быть также применены к электромагнитному излучению на других длинах волн, например, к видимому свету, СВЧ-волнам, ультрафиолетовому излучению, радиоволнам, инфракрасному излучению, гамма-излучению, или к электромагнитному излучению других типов.
[0091] Технологии этого раскрытия могут быть реализованы в самых разнообразных устройствах или аппаратах. Различные компоненты, модули, или блоки описаны в этом раскрытии, чтобы подчеркнуть функциональные аспекты устройств, выполненных с возможностью осуществлять раскрытые технологии, но не обязательно требуют реализации посредством разных аппаратных блоков. Напротив, как описано выше, различные блоки могут быть объединены в некотором аппаратном блоке или обеспечены посредством набора взаимодействующих аппаратных блоков, включающих в себя один или несколько процессоров, описанных выше, вместе с пригодным программными и/или аппаратно-программными средствами.
[0092] В одном или нескольких примерах, конкретные описанные функции могут быть реализованы в аппаратных, программных, аппаратно-программных средствах или в любой их комбинации. При реализации в программном средстве, функции могут храниться или передаваться в виде одной или нескольких команд или кода на компьютерно-читаемом носителе данных и выполняться аппаратным блоком обработки. Компьютерно-читаемые носители данных могут включать в себя компьютерно-читаемые запоминающие носители данных, которые соответствуют материальному носителю, такому как носители для хранения данных, или среды передачи данных, включающие в себя любую среду, которая обеспечивает передачу компьютерной программы из одного места в другое, например, согласно некоторому протоколу связи. Таким образом, компьютерно-читаемые носители данных, в общем, могут соответствовать (1) материальным компьютерно-читаемым запоминающим носителям данных, которые являются непереходными, или (2) среде передачи данных, такой как сигнал или несущая волна. Носители для хранения данных могут быть любыми пригодными носителями, к которым может получать доступ один или несколько компьютеров или один или несколько процессоров для извлечения команд, кода и/или структур данных для реализации технологий, описанных в этом раскрытии. Компьютерный программный продукт может включать в себя компьютерно-читаемый носитель данных.
[0093] В качестве примера, а не ограничения, такие компьютерно-читаемые носители данных могут содержать RAM, ROM, EEPROM, CD-ROM или другое оптическое дисковое запоминающее устройство, магнитное дисковое запоминающее устройство, или другие магнитные запоминающие устройства, флэш-память, или любой другой носитель, который может быть использован для хранения программного кода в форме команд или структур данных, и к которому может получать доступ компьютер. Также, любое соединение правильно называть компьютерно-читаемым носителем данных. Например, если команды передаются с веб-сайта, сервера, или другого удаленного источника с использованием коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (digital subscriber line - DSL), или беспроводных технологий, таких как инфракрасная технология, радио-технология, и СВЧ-технология, то тогда коаксиальный кабель, оптоволоконный кабель, витая пара, DSL, или беспроводные технологии, такие как инфракрасная технология, радио-технология, и СВЧ-технология, следует включить в определение носителя. Следует однако понимать, что компьютерно-читаемые запоминающие носители данных и носители для хранения данных не включают в себя соединения, несущие волны, сигналы, или другие переходные носители, а вместо этого направлены на непереходные, материальные носители для хранения данных. Диски (disk и disc), используемые здесь, включают в себя компакт-диск (compact disc - CD), лазерный диск, оптический диск, универсальный цифровой диск (digital versatile disc - DVD), гибкий диск и Blu-ray-диск, причем диски с англоязычным написанием «disk» обычно воспроизводят данные магнитным способом, в то время как диски с англоязычным написанием «disc» воспроизводят данные оптическим способом с использованием лазеров. Комбинации вышеупомянутого следует также включать в объем компьютерно-читаемых носителей данных.
[0094] Команды могут быть выполнены одним или несколькими процессорами, такими как один или несколько цифровых сигнальных процессоров (digital signal processor - DSP), микропроцессоров общего назначения, специализированных интегральных схем (application specific integrated circuit - ASIC), матриц программируемых логических вентилей (field-programmable gate array - FPGA) или других эквивалентных интегральных или дискретных логических схем. Соответственно, термин «процессор», используемый здесь, может относиться к любой из вышеупомянутых структур или к любой другой структуре, пригодной для реализации технологий, описанных здесь. Дополнительно, в некоторых аспектах, функциональность, описанная здесь, может быть обеспечена в специальных аппаратных и/или программных модулях. Также, конкретные части этих технологий могут быть реализованы в одной или нескольких схемах или логических элементах.
[0095] Выше были описаны различные примеры. Эти и другие примеры находятся в пределах объема нижеследующей формулы изобретения.
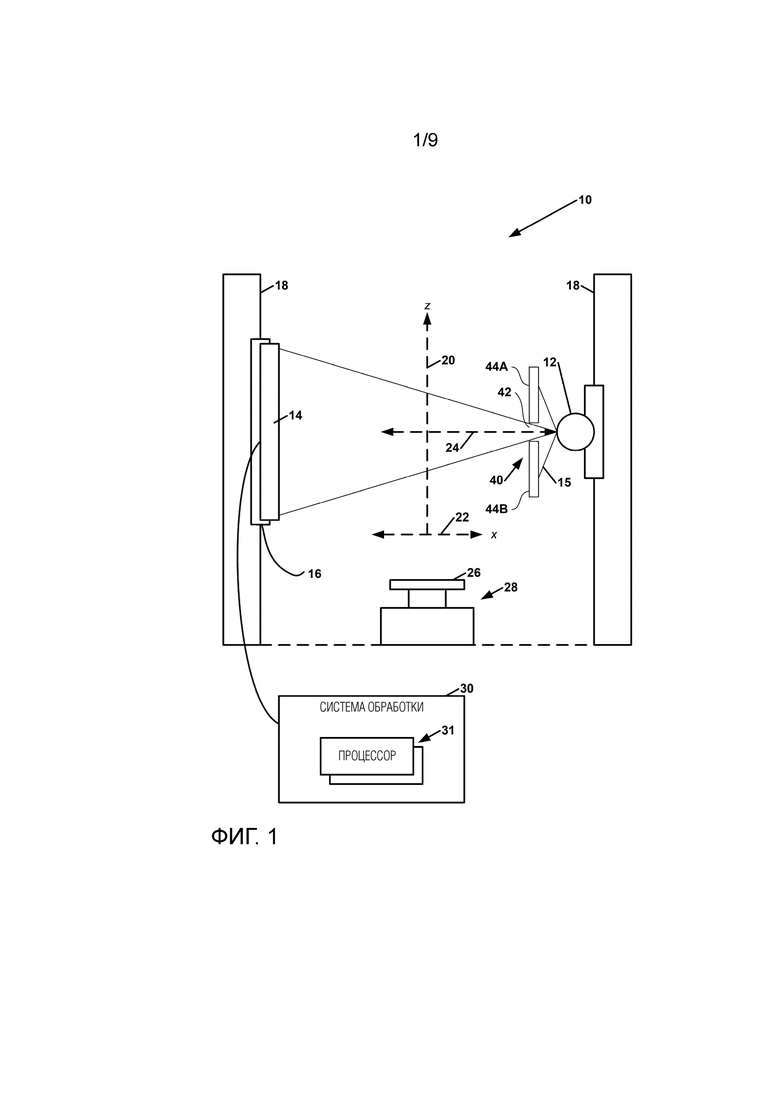
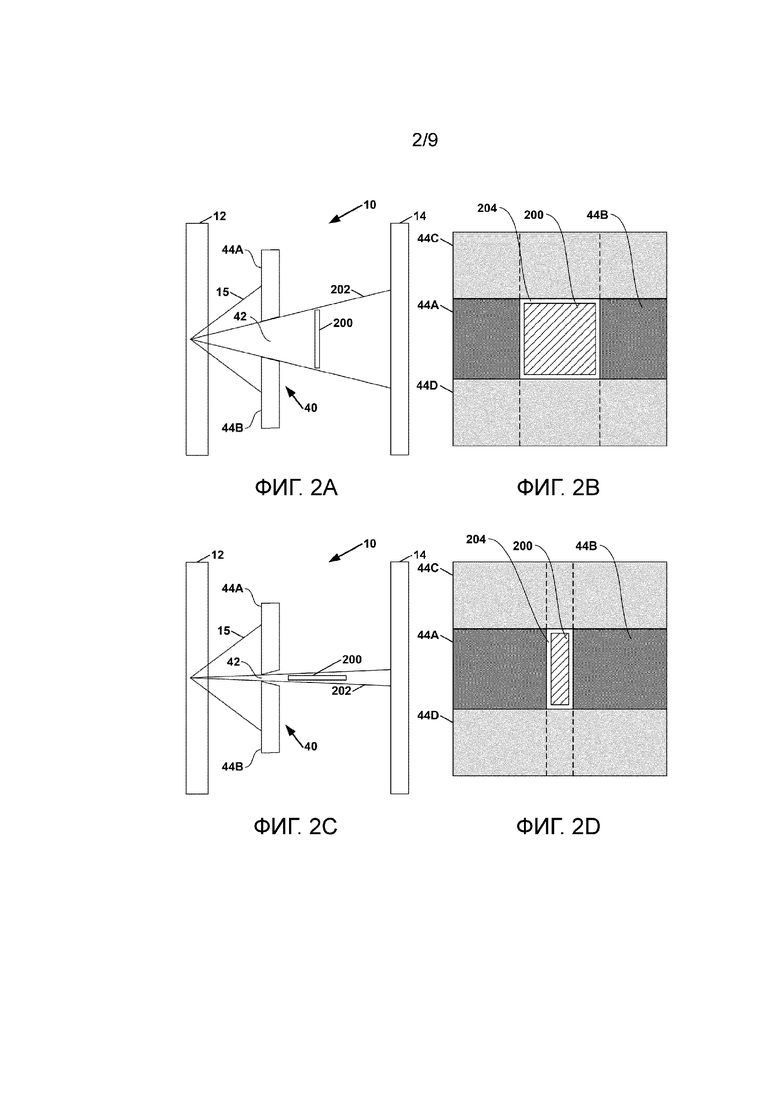
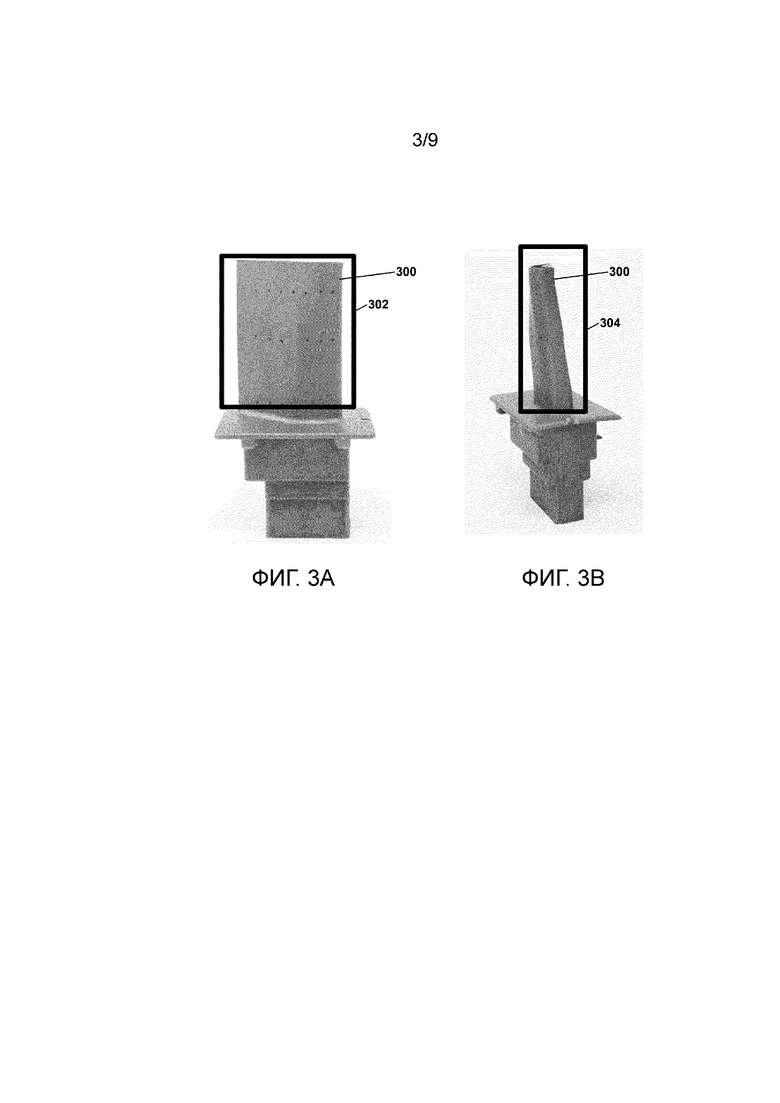
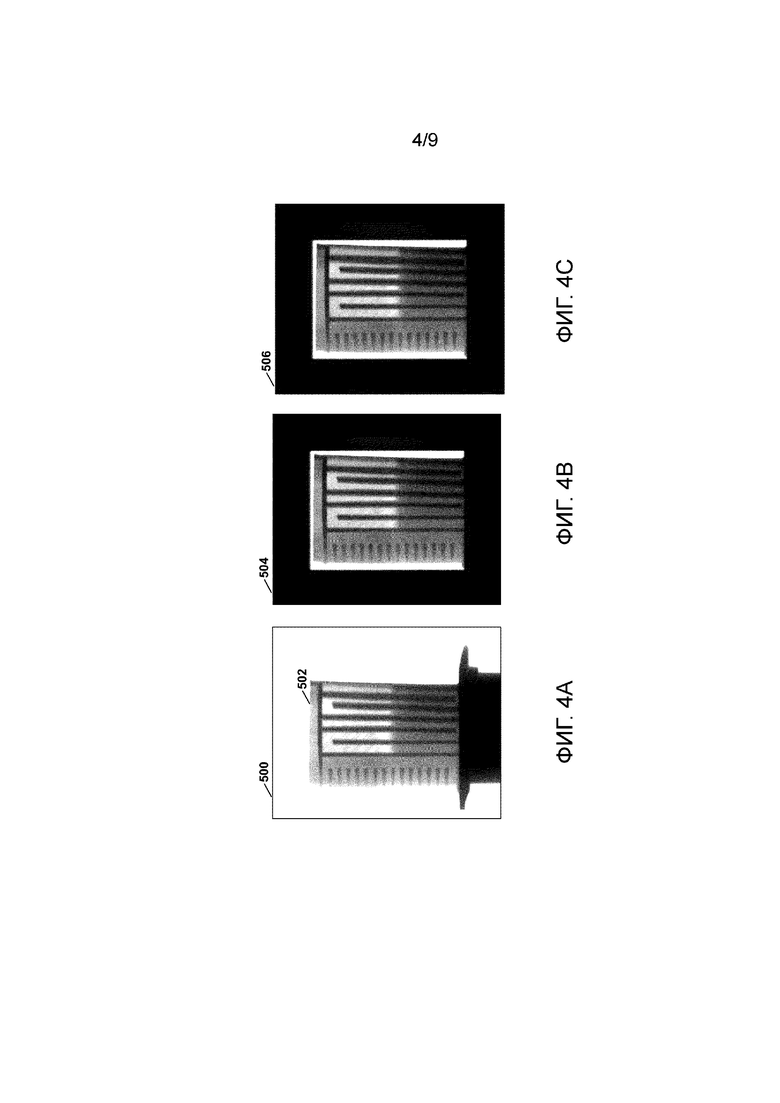
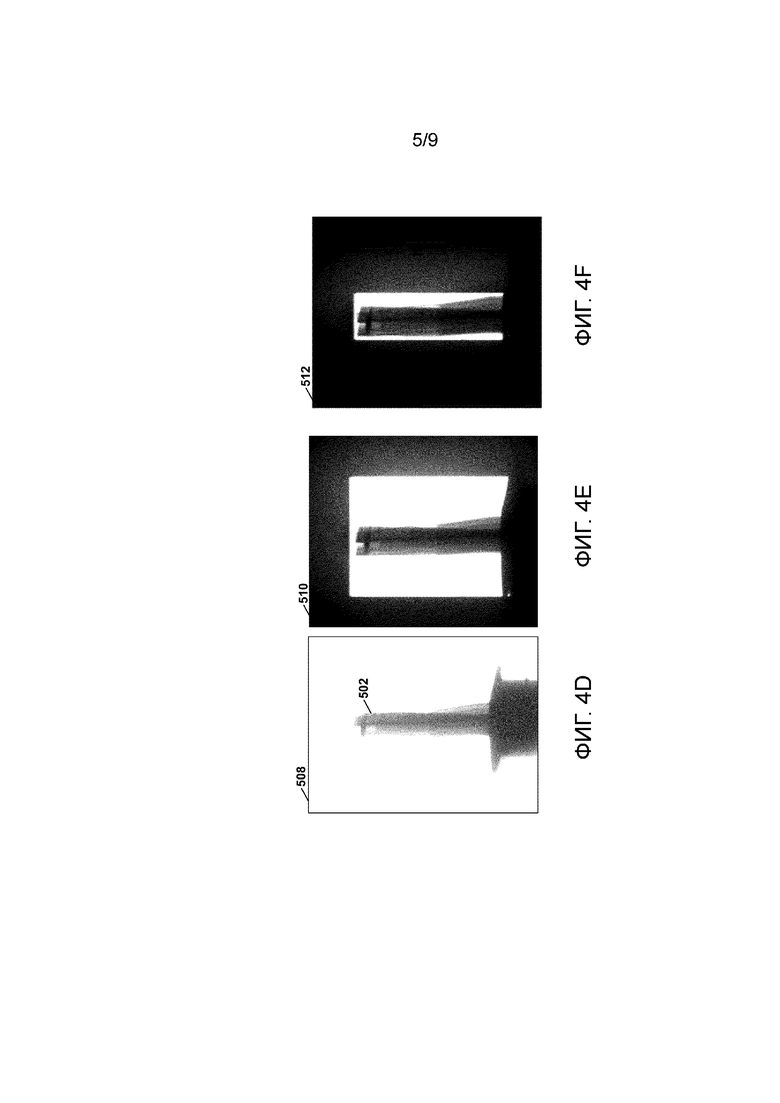
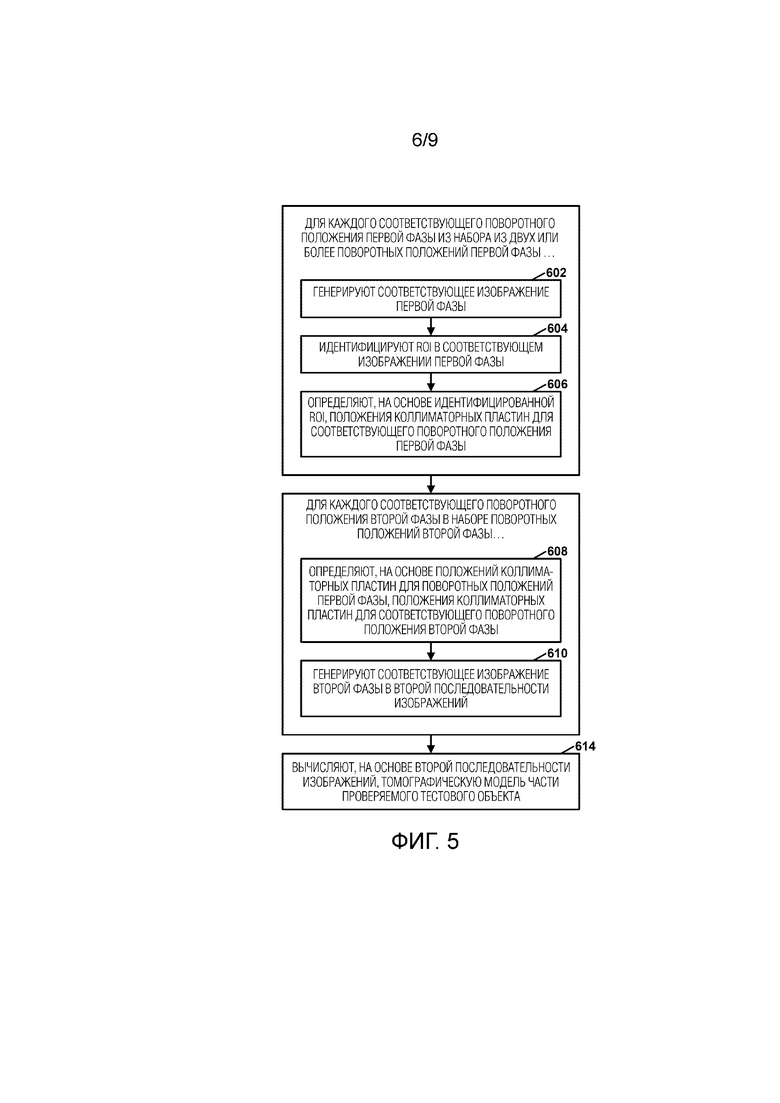
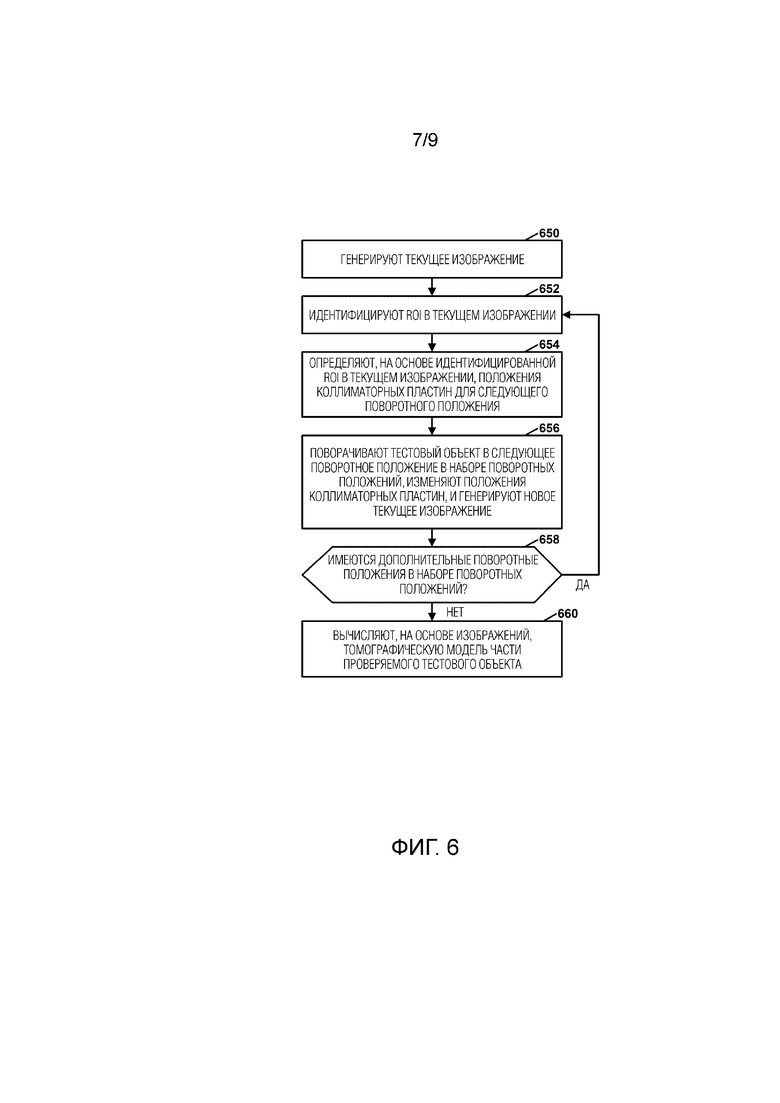
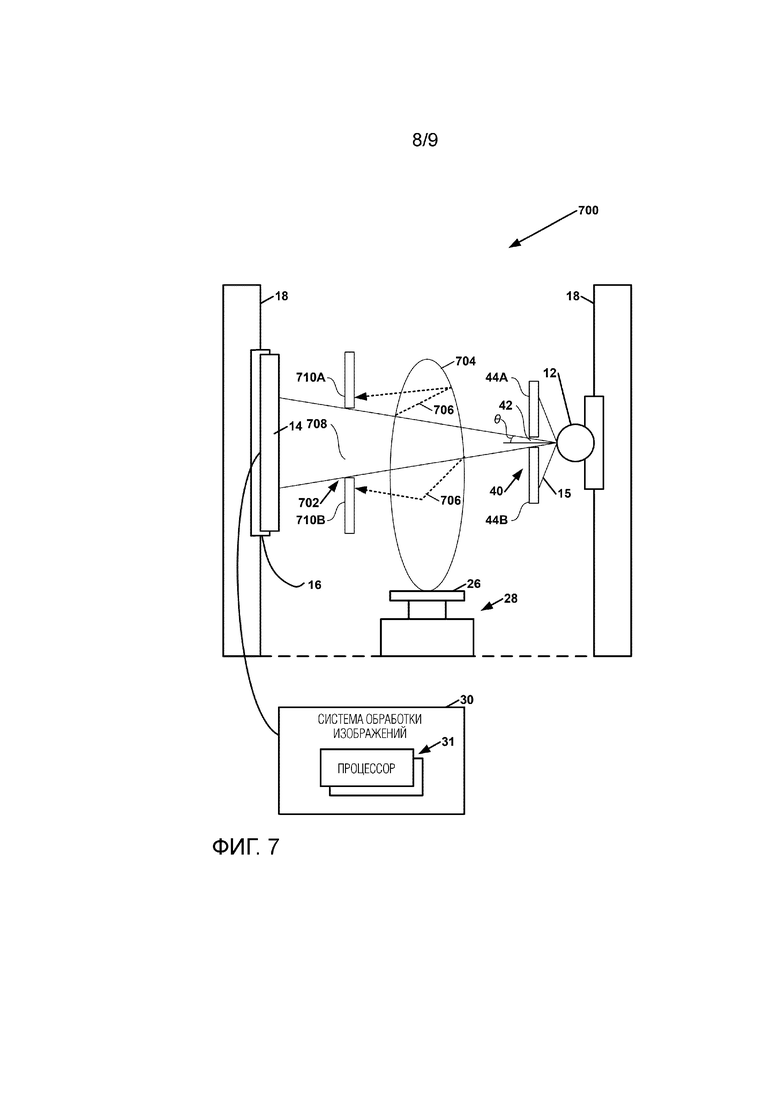
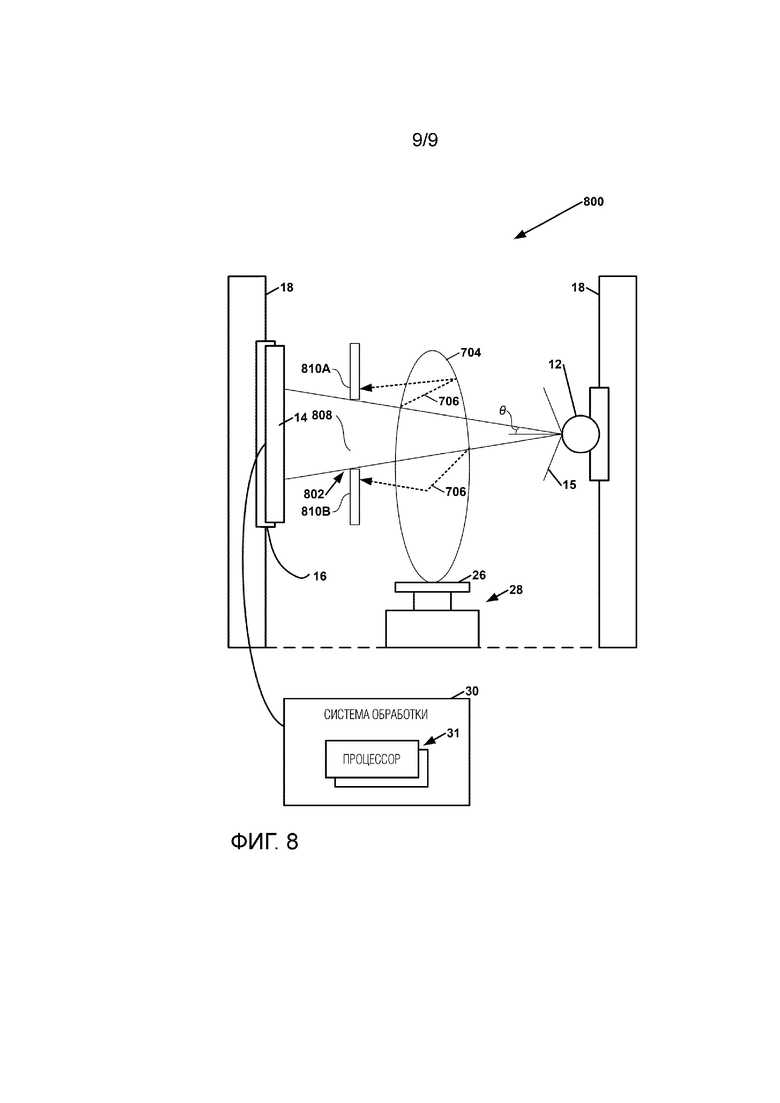
Использование: для генерирования томографических данных тестового объекта. Сущность изобретения заключается в том, что для каждого соответствующего поворотного положения первой фазы из набора поворотных положений первой фазы система визуализации может генерировать соответствующее изображение первой фазы. Система визуализации может определять, на основе идентифицированной области интереса в соответствующем изображении первой фазы, положения коллиматорных пластин для соответствующего поворотного положения первой фазы. Для каждого соответствующего поворотного положения второй фазы из набора поворотных положений второй фазы система визуализации может определять, на основе положений коллиматорных пластин для поворотных положений первой фазы, положения коллиматорных пластин для соответствующего поворотного положения второй фазы. Система визуализации может генерировать соответствующее изображение второй фазы во второй последовательности изображений в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы, и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы. Система визуализации может вычислять, на основе второй последовательности изображений, томографические данные для части тестового объекта. Технический результат: повышение качества томографических изображений. 3 н. и 17 з.п. ф-лы, 17 ил.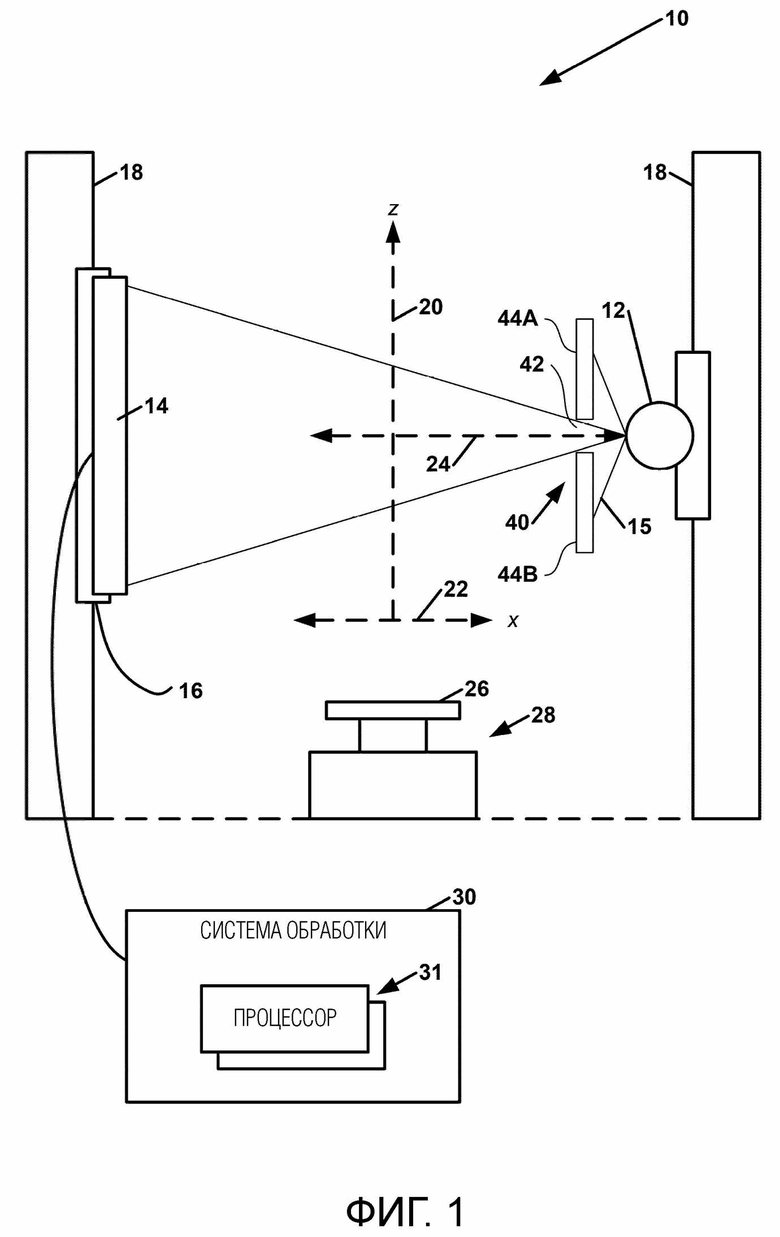
1. Способ генерирования томографических данных тестового объекта, причем способ содержит этапы, на которых:
для каждого соответствующего поворотного положения первой фазы сканирования из набора из двух или более поворотных положений первой фазы сканирования:
генерируют, посредством системы визуализации, соответствующее изображение первой фазы сканирования в первой последовательности изображений, причем соответствующее изображение первой фазы сканирования генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы сканирования;
идентифицируют, посредством системы визуализации, область интереса (ROI) в соответствующем изображении первой фазы сканирования, причем ROI соответствует части оцениваемого тестового объекта; и
определяют, посредством системы визуализации, на основе идентифицированной ROI в соответствующем изображении первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования, причем излучение излучается генератором излучения и проходит через апертуру коллиматора, коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора;
для каждого соответствующего поворотного положения второй фазы сканирования из набора из двух или более поворотных положений второй фазы сканирования:
определяют, посредством системы визуализации, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
генерируют, посредством системы визуализации, соответствующее изображение второй фазы сканирования во второй последовательности изображений, причем соответствующее изображение второй фазы сканирования является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования, и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
вычисляют, посредством системы визуализации, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
2. Способ по п. 1, в котором:
коллиматор расположен между генератором излучения и тестовым объектом, и тестовый объект расположен между коллиматором и детектором излучения, или
коллиматор расположен между детектором излучения и тестовым объектом, и тестовый объект расположен между коллиматором и генератором излучения.
3. Способ по п. 1, в котором набор поворотных положений первой фазы сканирования и набор поворотных положений второй фазы сканирования состоят из одних и тех же поворотных положений.
4. Способ по п. 1, в котором:
этап идентификации ROI в соответствующем изображении первой фазы сканирования содержит этапы, на которых:
идентифицируют, посредством системы визуализации, местоположения в соответствующем изображении первой фазы сканирования, которые соответствуют краям части оцениваемого тестового объекта; и
определяют, посредством системы визуализации, прямоугольную ограничивающую рамку, которая содержит идентифицированные местоположения, и
этап определения положений коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования содержит этап, на котором определяют, посредством системы визуализации, положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования таким образом, чтобы проекция краев апертуры коллиматора на детектор излучения соответствовала определенной прямоугольной ограничивающей рамке.
5. Способ по п. 1, в котором этап определения положений коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования содержит этапы, на которых:
на основе соответствующего поворотного положения второй фазы сканирования, являющегося таким же, как поворотное положение первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определяют, посредством системы визуализации, что положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются такими же, как положения коллиматорных пластин для поворотного положения первой фазы сканирования; и
на основе соответствующего поворотного положения второй фазы сканирования, являющегося отличным от любого поворотного положения первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определяют, посредством системы визуализации, положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования на основе положений коллиматорных пластин для двух или более поворотных положений первой фазы сканирования.
6. Способ по п. 1, в котором тестовый объект асимметричен относительно оси поворота для поворотных положений первой фазы сканирования и поворотных положений второй фазы сканирования.
7. Способ по п. 1, в котором:
коллиматор является первым коллиматором,
положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются первыми положениями коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования,
первый коллиматор расположен между тестовым объектом и генератором излучения,
второй коллиматор расположен между тестовым объектом и детектором излучения,
причем способ дополнительно содержит этап, на котором, для каждого соответствующего поворотного положения второй фазы сканирования из набора поворотных положений второй фазы сканирования, определяют, посредством системы визуализации, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, вторые положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
этап генерирования соответствующего изображения второй фазы сканирования содержит этап, на котором генерируют соответствующее изображение второй фазы сканирования на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования в то время, когда коллиматорные пластины первого коллиматора находятся в первых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, и в то время, когда коллиматорные пластины второго коллиматора находятся во вторых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования.
8. Способ по п. 1, в котором каждое соответствующее изображение в первой последовательности изображений является рентгенограммой.
9. Система визуализации, содержащая:
генератор излучения;
детектор излучения;
коллиматор, причем излучение, излучаемое генератором излучения, проходит через апертуру коллиматора, при этом коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора; и
систему обработки, выполненную с возможностью:
для каждого соответствующего поворотного положения первой фазы сканирования из набора из двух или более поворотных положений первой фазы сканирования:
генерировать соответствующее изображение первой фазы сканирования в первой последовательности изображений, причем соответствующее изображение первой фазы сканирования генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы сканирования;
идентифицировать область интереса (ROI) в соответствующем изображении первой фазы сканирования, причем ROI соответствует части оцениваемого тестового объекта; и
определять, на основе идентифицированной ROI в соответствующем изображении первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования;
для каждого соответствующего поворотного положения второй фазы сканирования из набора из двух или более поворотных положений второй фазы сканирования:
определять, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
генерировать соответствующее изображение второй фазы сканирования во второй последовательности изображений, причем соответствующее изображение второй фазы сканирования является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
вычислять, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
10. Система визуализации по п. 9, в которой коллиматор расположен между генератором излучения и тестовым объектом и тестовый объект расположен между коллиматором и детектором излучения.
11. Система визуализации по п. 9, в которой коллиматор расположен между детектором излучения и тестовым объектом и тестовый объект расположен между коллиматором и генератором излучения.
12. Система визуализации по п. 9, в которой набор поворотных положений первой фазы сканирования и набор поворотных положений второй фазы сканирования состоят из одних и тех же поворотных положений.
13. Система визуализации по п. 9, в которой:
система обработки выполнена таким образом, что, в качестве части этапа идентификации ROI в соответствующем изображении первой фазы сканирования, система обработки:
идентифицирует местоположения в соответствующем изображении первой фазы сканирования, которые соответствуют краям части оцениваемого тестового объекта; и
определяет прямоугольную ограничивающую рамку, которая содержит идентифицированные местоположения, и
система обработки выполнена таким образом, что, в качестве части этапа определения положений коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования, система обработки определяет положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования таким образом, чтобы проекция краев апертуры коллиматора на детектор излучения соответствовала определенной прямоугольной ограничивающей рамке.
14. Система визуализации по п. 9, в которой система обработки выполнена таким образом, что, в качестве части этапа определения положений коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, система обработки:
на основе соответствующего поворотного положения второй фазы сканирования, являющегося таким же, как поворотное положение первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определяет, что положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются такими же, как положения коллиматорных пластин для поворотного положения первой фазы сканирования; и
на основе соответствующего поворотного положения второй фазы сканирования, являющегося отличным от любого поворотного положения первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определяет положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования на основе положений коллиматорных пластин для двух или более поворотных положений первой фазы сканирования.
15. Система визуализации по п. 9, в которой
коллиматор является первым коллиматором,
положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются первыми положениями коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования,
первый коллиматор расположен между тестовым объектом и генератором излучения,
второй коллиматор расположен между тестовым объектом и детектором излучения,
система обработки дополнительно выполнена с возможностью, для каждого соответствующего поворотного положения второй фазы сканирования из набора поворотных положений второй фазы сканирования, определять, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, вторые положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, и
система обработки выполнена с возможностью генерировать соответствующее изображение второй фазы сканирования на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования, в то время, когда коллиматорные пластины первого коллиматора находятся в первых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, и в то время, когда коллиматорные пластины второго коллиматора находятся во вторых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования.
16. Система визуализации по п. 9, в которой каждое соответствующее изображение в первой последовательности изображений является изображением на основе видимого света.
17. Невременный компьютерно-читаемый носитель данных, имеющий команды, хранимые на нем, которые, при выполнении, заставляют один или несколько процессоров:
для каждого соответствующего поворотного положения первой фазы сканирования из набора из двух или более поворотных положений первой фазы сканирования:
генерировать соответствующее изображение первой фазы сканирования в первой последовательности изображений, причем соответствующее изображение первой фазы сканирования генерируется в то время, когда тестовый объект находится в соответствующем поворотном положении первой фазы сканирования;
идентифицировать область интереса (ROI) в соответствующем изображении первой фазы сканирования, причем ROI соответствует части оцениваемого тестового объекта; и
определять, на основе идентифицированной ROI в соответствующем изображении первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования, причем излучение излучается генератором излучения и проходит через апертуру коллиматора, при этом коллиматор расположен между генератором излучения и детектором излучения, тестовый объект расположен между генератором излучения и детектором излучения, и коллиматор содержит множество коллиматорных пластин, которые подвижны с возможностью изменять размер и форму апертуры коллиматора;
для каждого соответствующего поворотного положения второй фазы сканирования из набора из двух или более поворотных положений второй фазы сканирования:
определять, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
генерировать соответствующее изображение второй фазы сканирования во второй последовательности изображений, причем соответствующее изображение второй фазы сканирования является рентгенограммой, генерируемой на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования, и в то время, когда коллиматорные пластины находятся в положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования; и
вычислять, на основе второй последовательности изображений, томографические данные для части оцениваемого тестового объекта.
18. Невременный компьютерно-читаемый носитель данных по п. 17, в котором:
в качестве части этапа, на котором заставляют один или несколько процессоров идентифицировать ROI в соответствующем изображении первой фазы сканирования, выполнение команд заставляет один или несколько процессоров:
идентифицировать местоположения в соответствующем изображении первой фазы сканирования, которые соответствуют краям части оцениваемого тестового объекта; и
определять прямоугольную ограничивающую рамку, которая содержит идентифицированные местоположения, и
в качестве части этапа, на котором заставляют один или несколько процессоров определять положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования, выполнение команд заставляет один или несколько процессоров определять положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования таким образом, чтобы проекция краев апертуры коллиматора на детектор излучения соответствовала определенной прямоугольной ограничивающей рамке.
19. Невременный компьютерно-читаемый носитель данных по п. 17, в котором, в качестве части этапа, на котором заставляют один или несколько процессоров определять положения коллиматорных пластин для соответствующего поворотного положения первой фазы сканирования, выполнение команд заставляет один или несколько процессоров:
на основе соответствующего поворотного положения второй фазы сканирования, являющегося таким же, как поворотное положение первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определять, что положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются такими же, как положения коллиматорных пластин для поворотного положения первой фазы сканирования; и
на основе соответствующего поворотного положения второй фазы сканирования, являющегося отличным от любого поворотного положения первой фазы сканирования в наборе поворотных положений первой фазы сканирования, определять положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования на основе положений коллиматорных пластин для двух или более поворотных положений первой фазы сканирования.
20. Система визуализации по п. 15, в которой:
коллиматор является первым коллиматором,
положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования являются первыми положениями коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования,
первый коллиматор расположен между тестовым объектом и генератором излучения,
второй коллиматор расположен между тестовым объектом и детектором излучения,
причем выполнение команд дополнительно заставляет один или несколько процессоров определять, для каждого соответствующего поворотного положения второй фазы сканирования из набора поворотных положений второй фазы сканирования, на основе положений коллиматорных пластин для поворотных положений первой фазы сканирования, вторые положения коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, и
выполнение команд заставляет один или несколько процессоров генерировать соответствующее изображение второй фазы сканирования на основе структур излучения, детектируемых детектором излучения в то время, когда тестовый объект находится в соответствующем поворотном положении второй фазы сканирования в то время, когда коллиматорные пластины первого коллиматора находятся в первых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования, и в то время, когда коллиматорные пластины второго коллиматора находятся во вторых положениях коллиматорных пластин для соответствующего поворотного положения второй фазы сканирования.
| US 2015302946 A1, 22.10.2015 | |||
| US 6353227 B1, 05.03.2002 | |||
| US 2010034357 A1, 11.02.2010 | |||
| US 5332908 A, 26.07.1994 | |||
| КОЛЛИМАТОР ДЛЯ СКВОЗНОГО СКАНИРОВАНИЯ | 2008 |
|
RU2499559C2 |
| УСТРОЙСТВО ДЛЯ ДИАФРАГМИРОВАНИЯ РАБОЧЕГО ПУЧКА МЕДИЦИНСКОГО РЕНТГЕНОДИАГНОСТИЧЕСКОГО АППАРАТА | 2004 |
|
RU2281692C1 |

