Предлагаемая система относится к системам, используемым для реализации комплексов защиты Земли от летающих объектов естественного и искусственного происхождения, приближающихся к Земле.
Известны устройства и системы определения параметров движения астероидов (патенты РФ №№2.107.306, 2.175.139, 2.235.955, 2.250.470, 2.267.975, 2.273.034,2.374.597,2.392.639, 2.453.813,2.518.108, 2.554.086, 2.568.628, 2.578003; патенты США №№5.920278, 6.683.558, 7.197.381, 7.463.181; патенты ЕР №№1.026.519, 1.651.978; Медведев Ю.Д. и др. Астероидно-кометная опасность. / Под ред. А.Г. Сокольского - СПб, Институт теоретической астрономии РАН, 1996 и другие).
Из известных устройств и систем наиболее близким к предлагаемой является «Устройство определения параметров движения астероида» (патент РФ №2.568.628, B64G 3/00, 2014), которое и выбрано в качестве базового объекта.
Известное устройство включает в себя наземную радиолокационную систему (РЛС) с четырьмя приемными и одной передающей антенной, с двумя фазовыми детекторами, четырьмя блоками отображения информации, регистратором сдвига и блоком вычисления скорости астероида. Передающая антенна, установленная в центре окружности, излучает непрерывный сигнал с начальной модуляцией по одностороннему пилообразному линейно-возрастающему закону. Отраженные от астероида сигналы принимаются четырьмя антеннами, расположенными равномерно вдоль окружности. Параметры движения астероида определяют по моментам обнаружения и по частотам разностных сигналов, принимаемых и формируемых в приемных антеннах, используя указанные выше средства РЛС.
Недостатком известного устройства является низкая точность определения параметров движения астероида.
Технической задачей изобретения является повышение точности определения параметров движения астероида путем использования сложных сигналов с фазовой манипуляцией, n принимаемых антенн, размещенных в азимутальной плоскости по окружности радиусом d с возможностью их электронного вращения с угловой скоростью  вокруг приемопередающей антенны, размещенной в центре окружности, и двух приемных антенн, размещенных в угломестной плоскости.
вокруг приемопередающей антенны, размещенной в центре окружности, и двух приемных антенн, размещенных в угломестной плоскости.
Поставленная задача решается тем, что система определения параметров движения астероида, содержащая, в соответствии с ближайшим аналогом, передатчик, четырех приемных антенн, расположенных на окружности, на равном удалении по окружности друг от друга, последовательно включенные смеситель и фильтр разностной частоты, первый и второй фазовые детекторы, отличается от ближайшего аналога тем, что она снабжена m приемными антеннами, размещенными на окружности в азимутальной плоскости, двумя приемными антеннами, размещенными в угломестной плоскости, приемопередающей антенной, размещенной в центре окружности, дуплексером, опорным генератором, генератором импульсов, электронным коммутатором, четырьмя усилителями высокой частоты, шестью перемножителями, четырьмя полосовыми фильтрами, линией задержки, фазовращателем на 90°, блоком регистрации, третьим, четвертым и пятым фазовыми детекторами, фильтром нижних частот, фазометром и вычислительным блоком, причем к первому выходу опорного генератора последовательно подключены генератор импульсов, электронный коммутатор, n выходов которого соединены с n=4+m приемных антенн, равномерно размещенных по окружности радиусом d с возможностью электронного их вращения вокруг приемопередающей антенны, размещенной в центре окружности, второй усилитель высокой частоты, первый перемножитель, второй вход которой соединен с выходом фильтра разностной частоты, первый полосовой фильтр, линия задержки, первый фазовый детектор, второй вход которого соединен с выходу первого полосового фильтра, фазовращатель на 90°, второй фазовый детектор, второй вход которого соединен со вторым выходом опорного генератора и блок регистрации, к первому выходу передатчика последовательно подключены дуплексер, вход-выход которого связан с приемопередающей антенной, и первый усилитель высокой частоты, выход которого соединен с первым входом смесителя, к второму входу которого подключен выход гетеродина, к выходу первого полосового фильтра последовательно подключены второй перемножитель, второй вход которого соединен с выходом гетеродина, второй полосовой фильтр и третий фазовый детектор, второй вход которого соединен с третьим выходом опорного генератора, а выход подключен к второму входу блока регистрации, к второму выходу передатчика последовательно подключены третий перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, фильтр нижних частот и вычислительный блок, выход которого соединен с третьим входом блока регистрации, к первой приемной антенне, размещенной в угломестной плоскости последовательно подключены третий усилитель высокой частоты, четвертый перемножитель, второй вход которого соединен с выходом фильтра разностной частоты, третий полосовой фильтр и четвертый фазовый детектор, второй вход которого соединен с выходом гетеродина, а выход подключен к четвертому входу блока регистрации и к второму входу вычислительного блока, к второй приемной антенне, размещенной в угломестной плоскости, последовательно подключены четвертый усилитель высокой частоты, пятый перемножитель, второй вход которого соединен с выходом фильтра разностной частоты, четвертый полосовой фильтр и пятый фазовый детектор, второй вход которого соединен с выходом гетеродина, а выход подключен к пятому входу блока регистрации и к третьему входу вычислительного блока, к выходу третьего полосового фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого полосового фильтра, и фазометр, выход которого соединен с четвертым входом вычислительного блока.
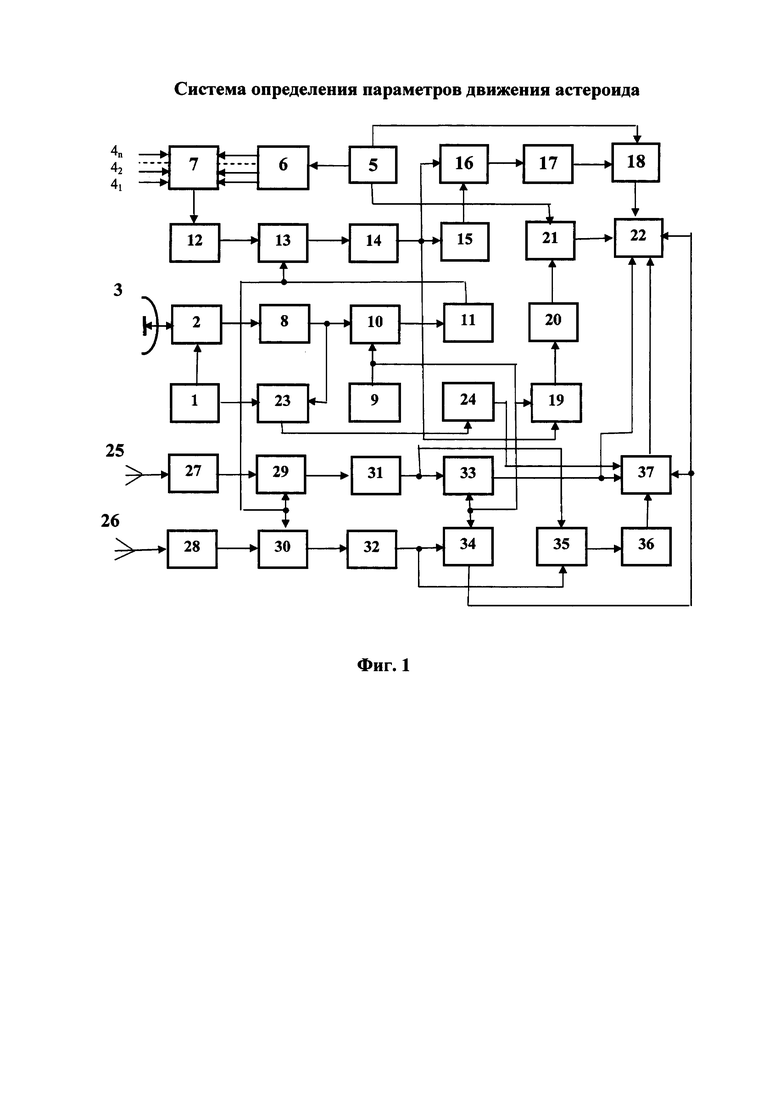
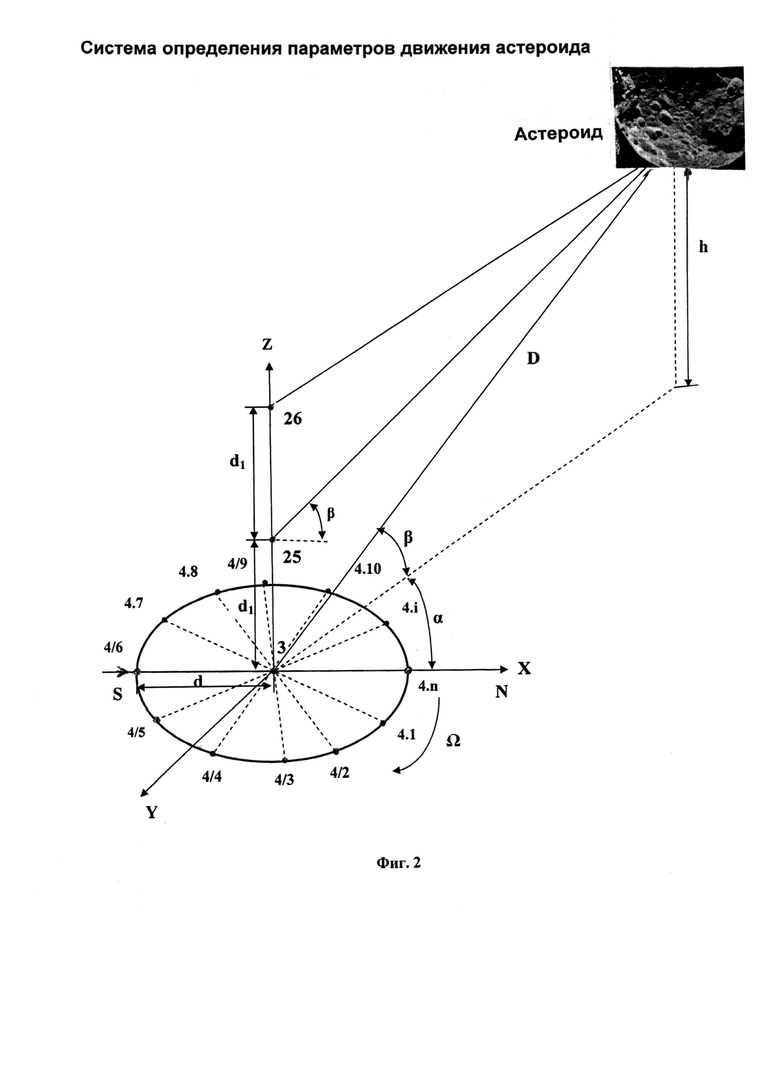
Структурная схема предлагаемой системы представлена на фиг. 1. Взаимное расположение приемопередающей антенны 3, приемных антенн 4.i(i=1, 2, …, n), 25,26 и астероида показано на фиг. 2.
Система определения параметров движения астероида содержит последовательно включенные передатчик 1, дуплексер 2, вход-выход которого связан с приемопередающей антенной 3, усилитель 8 высокой частоты, смеситель 10, второй вход которого соединен с выходом гетеродина 9, и фильтр 11 разностной частоты. К первому выходу опорного генератора 5 последовательно подключены генератор 6 импульсов, электронный коммутатор 7, n входов которого соединены с выходами n приемных антенн 4.i(i=1, 2, …, n), размещенных по окружности радиусов d с возможностью их электронного вращения со скоростью вокруг приемопередающей антенны 3, размещенной в центре окружности, усилитель 12 высокой частоты, первый перемножитель 13, второй вход которого соединен с выходом фильтра 11 разностной частоты, первый полосовой фильтр 14, линия задержки 15, первый фазовый детектор 16, фазовращатель 17 на 90°, второй фазовый детектор 18, второй вход которого соединен с вторым выходом опорного генератора 5 и блок 22 регистрации. К выходу первого полосового фильтра 14 последовательно подключены второй перемножитель 19, второй вход которого соединен с выходом гетеродина 9, второй полосовой фильтр 20 и первый фазовый детектор 21, второй вход которого соединен с третьим выходом опорного генератора 5, а выход подключен к второму входу блока 22 регистрации. К второму выходу передатчика 1 последовательно подключены третий перемножитель 23, второй вход которого соединен с выходом первого усилителя 8 высокой частоты, фильтр 24 низких частот и вычислительный блок 37, выход которого подключен к третьему входу блока 22 регистрации. К выходу первой приемной антенны 25, размещенной в угломестной плоскости, последовательно подключены третий усилитель 27 высокой частоты, четвертый перемножитель 29, второй вход которого соединен с выходом фильтра 11 разностной частоты, третий полосовой фильтр 31 и четвертый фазовый детектор 33, второй вход которого соединен с выходом гетеродина 9, а выход подключен к четвертому входу блока 22 регистрации и к второму входу вычислительного блока 37. К выходу второй приемной антенны 26, размещенной в угломестной плоскости, последовательно подключены четвертый усилитель 28 высокой частоты, пятый перемножитель 30, второй вход которого соединен с выходом фильтра 11 разностной частоты, четвертый полосовой фильтр 32 и пятый фазовый детектор 34, второй вход которого соединен с выходом гетеродина 9, а выход подключен к пятому входу блока 22 регистрации и к третьему входу вычислительному блоку 37. К выходу третьего полосового фильтра 31 последовательно подключены шестой перемножитель 35, второй вход которого соединен с выходом четвертого полосового фильтра 32, и фазометр 36, выход которого соединен с четвертым входом вычислительного блока 37.
Предлагаемая система работает следующим образом.
Передатчик 1 формирует сложный сигнал с фазовой манипуляцией (ФМн)
uc(t)=Uc⋅cos[ωct+ϕk(t)+ϕс], 0≤t≤Tc,
где Uc, ωc, ϕc, Tc - амплитуда, несущая частота, начальная фаза и длительность сигнала;
ϕк={0,π} - манипулируемая составляющая фазы, отражающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), причем ϕк(t)=const при кτЭ<t<(к+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (к=1, 2, …, N-1);
τЭ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc=NτЭ),
который через дуплексер 2 поступает в приемопередающую антенну 3 и излучается ею в сторону астероида, приближающегося к Земле со скоростью V=30 км/с.
Отраженные от астероида сложные ФМн сигналы:
u1(t)=U1cos[(ωc±Δω)t+ϕk(t)+ϕ1],

u3(t)=U3cos[(ωc±Δω)t+ϕk(t)+ϕ2),
u4(t)=U4cos[(ωc±Δω)t+ϕk(t)+ϕ3), 0≤t≤Tc
где ±Δω - нестабильность несущей частоты сигналов, обусловленная различными дестабилизирующими факторами, в том числе и эффектом Доплера
d - радиус окружности, на которой размещены приемные антенны 4i(i=1, 2, …, n, n=4+m) (измерительная база)
λ - длина волны;
- скорость электронного вращения приемных антенн 4.i(i=1, 2, …, n) вокруг приемопередающей антенны 3;
α - пеленг (азимут) на астероид,
с выходов приемопередающей и приемных антенн 3, 4.i(i=1, 2, …, n), 25 и 26 непосредственно и через дуплексер 2 и электронный коммутатор 7, поступают на входы усилителей 8, 12, 27 и 28 высокой частоты, а затем на первые входы смесителя 10, перемножителей 13, 29 и 30 соответственно. На второй вход смесителя 10 с выхода гетеродина 9 подается напряжение
uг(t)=Uгcos(ωгt+ϕг).
На выходе смесителя 10 образуются напряжения комбинационных частот. Фильтром 11 выделяется напряжение разностной (промежуточной) частоты
uпр(t)=Uпp cos[(ωпр±Δω)t+ϕk(t)+ϕпр],
где 
ωпр=ωс-ωг - разностная (промежуточная) частота;
ϕпр=ϕг-ϕг,
которое подается на вторые входы перемножителей 13, 29 и 30. На выходе перемножителя 13 образуется фазомодулируемое (ФМ) колебание на частоте ωг гетеродина 9

где 
которое выделяется полосовым фильтром и поступает на первые входы фазового детектора 16, линии задержки 15 и перемножителя 19. На второй вход последнего подается напряжение uг(t) гетеродина 9. На выходе перемножителя 19 образуется гармоническое напряжение

где 
которое выделяется полосовым фильтром 20 и поступает на первый вход фазового детектора 21. На второй вход фазового детектора 21 с третьего выхода опорного генератора 5 подается опорное напряжение
u0(t)=U0 cosΩt.
На выходе фазового детектора 21 образуется низкочастотное напряжение
uн1(α)=Uн1cosα,
где 
которое фиксируется блоком 22 регистрации. Так формируется шкала пеленгации астероида в азимутальной плоскости, которая является точной, но неоднозначной шкалой.
Одновременно фазомодулируемое колебание u5(t) подвергается автокорреляционной обработке с помощью автокоррелятора, состоящего из линии задержки 15 и фазового детектора 16. В фазомодулированном напряжении u5(t) величина  называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы от нулевого значения, происходящего при электронном вращении приемных антенн 4.i(i=1, 2, …, n) вокруг приемопередающей антенны 3.
называемая индексом фазовой модуляции, характеризует максимальное значение отклонения фазы от нулевого значения, происходящего при электронном вращении приемных антенн 4.i(i=1, 2, …, n) вокруг приемопередающей антенны 3.
Приемные антенны 4.i(i=1, 2, …, n) поочередно с частотой коммутируются с помощью электронного коммутатора 7, управляемого n-фазным генератором 6 импульсов. Управляющие импульсы формируются генератором 6 импульсов из гармонического напряжения, вырабатываемого опорным генератором 5
uj(t)=U0cosΩt.
Однако при  наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения отношения
наступает неоднозначность отсчета угла α. Устранение указанной неоднозначности путем уменьшения отношения  обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазового пеленгатора. Кроме того, в диапазонах метровых и особенно дециметровых волн брать малые значения
обычно себя не оправдывает, так как при этом теряется основное достоинство широкобазового пеленгатора. Кроме того, в диапазонах метровых и особенно дециметровых волн брать малые значения  частот не удается из-за конструктивных соображений.
частот не удается из-за конструктивных соображений.
В связи с изложенным соображением возникает задача уменьшения индекса фазовой модуляции без уменьшения относительного размера измерительной базы  . Это достигается автокорреляционной обработкой фазомодулированного напряжения u5(t) с помощью линии задержки 15 и фазового детектора 16. Причем время задержки τ линии задержки 15 выбирается таким, чтобы уменьшить индекс фазовой модуляции до величины
. Это достигается автокорреляционной обработкой фазомодулированного напряжения u5(t) с помощью линии задержки 15 и фазового детектора 16. Причем время задержки τ линии задержки 15 выбирается таким, чтобы уменьшить индекс фазовой модуляции до величины
где d2<d,
при которой справедливо неравенство  обеспечивающее однозначную пеленгацию астероида в азимутальной плоскости. На выходе фазового детектора 16 образуется гармоническое напряжение
обеспечивающее однозначную пеленгацию астероида в азимутальной плоскости. На выходе фазового детектора 16 образуется гармоническое напряжение
u7(t)=U7 cos(Ωt-α), 0≤t≤Тс,
где 
которое через фазовращатель 17 на 90° поступает на первый вход фазового детектора 18, на второй вход которого со второго выхода опорного генератора 5 подается опорное напряжение u6(t). На выходе фазового детектора 18 образуется низкочастотное напряжение
up2(t)=Uн2sinα,
где 
которое фиксируется блоком 22 регистрации. Так формируется грубая, но однозначная шкала пеленгации астероида в азимутальной плоскости.
На второй вход перемножителей 29 и 30 с выхода фильтра 11 разностной частоты подается напряжение uпp(t). На выходе перемножителей 29 и 30 образуются гармонические напряжения на частоте ωг гетеродина 9 соответственно.
u8(t)=U8 cos(ωгt+ϕг+Δϕ1),
u9(t)=U9 cos(ωгt+ϕг+Δϕ2}, 0≤t≤Tc,
где 


d1 - расстояние между приемными антеннами 3 и 25 (измерительная база);
2d1 - расстояние между приемными антеннами 3 и 26 (измерительная база),
которые выделяются полосовыми фильтрами 31 и 32 и поступают на первый вход фазовых детекторов 33 и 34 соответственно, на второй вход которых подается напряжение uг(t) гетеродина 9. На выходе фазовых детекторов 33 и 34 формируются низкочастотные напряжения соответственно:
uн3(t)=Uн3 cosΔϕ1,
uн4(t)=Uн4 cosΔϕ2,
где 
которое фиксируется блоком 22 регистрации.
Так формируются грубая, но однозначная шкала пеленгации, точная, но неоднозначная шкала пеленгации астероида в угломестной плоскости. Причем между измерительными базами d1 и 2d1 устанавливают следующее неравенство:
При этом антенны 25 и 26 устанавливаются на специальной мачте. Напряжения u8(t) и u9(t) с выходов полосовых фильтров 31 и 32 одновременно поступают на два входа перемножителя 35, на выходе которого образуется напряжение, пропорциональное разности разностей фаз
u10(t)=U10 cos(Δϕ1-Δϕ2),
где 
Это напряжение поступает на вход фазометра 36. Последний измеряет разность разностей фаз
Δ(Δϕ)=Δϕ1-Δϕ2,
которая поступает на вход вычислительного блока 37, в котором определяется дальность до астероида

и высота полета астероида над поверхностью горизонта
h=D⋅sinβ.
Напряжения uc(t) и u1(t) поступают на два входа перемножителя 23, на выходе которого образуется низкочастотное напряжение
uн(t)=Uн cos(±Δωt+ϕн), 0≤t≤Тс,
где 
ϕн=ϕс-ϕ1,
пропорциональное доплеровскому смещению ±Δω. При этом величина и знак доплеровского смещения определяют величину и направления радиальной скорости астероида.
Измеренные значения D, h и радиальной скорости фиксируются блоком 22 регистрации.
Таким образом, предлагаемая система по сравнению с базовым объектом и другими техническими решениями аналогичного назначения обеспечивает повышение точности определении параметров движения астероида. Это достигается использованием сложных сигналов с фазовой манипуляцией, приемных антенн, размещенных в азимутальной плоскости по окружности радиусом d с возможностью их электронного вращения с угловой скоростью вокруг приемопередающей антенны, размещенной в центре окружности, и двух приемных антенн, размещенных в угломестной плоскости.
Сложные сигналы с фазовой манипуляцией обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого ФМн сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн сигнала не мала, она просто распределена по частотно-временной области так, что в каждый точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн сигналов обусловлена разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн сигналов априорно неизвестной структуры с целью повышения чувствительности приемника.
Источники информации
1. Астероидно-кометная опасность: вчера, сегодня, завтра / Под ред. Б.М. Шустова, Л.В. Рыхловой. - М.: ФИЗМАТЛИТ. 2010 - 384 с.
2. Патент РФ №2.059.280. Способ определения геометрических характеристик объекта многоапертурной оптической системы/ Бакут П.Α., Плотников И.П., Рожков И.А., Ряхин А.Д., Свиридов К.Н. Опубл. 27.04.1996 г.
3. Патент РФ №2.175.139. Способ радиолокации пассивных космических объектов. / Атанашев А.Б., Землянов А.Б., Атанашев Д.А., Бойков К.Б., Докукин В.Ф. Опубл. 20.10.2001.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| Вертолетный радиоэлектронный комплекс для мониторинга сельскохозяйственных угодий | 2018 |
|
RU2692117C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2427853C1 |
| Автоматизированная система управления восстановлением объектов инфраструктуры | 2019 |
|
RU2721663C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| Многофункциональный вертолетный радиоэлектронный комплекс | 2019 |
|
RU2736344C1 |
| Система контроля транспортировки специальных грузов | 2019 |
|
RU2725769C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2010 |
|
RU2419991C1 |
Изобретение относится к комплексам защиты Земли от космических объектов. Система определения параметров движения астероида содержит передатчик, дуплексер, приемопередающую антенну, приемные антенны, опорный генератор, генератор импульсов, электронный коммутатор, гетеродин, смеситель, фильтр разностной частоты, усилители высокой частоты, перемножители, полосовые фильтры, линию задержки, фазовые детекторы, фазовращатель на 90°, блок регистрации, фильтр нижних частот, фазометр и вычислительный блок. Техническим результатом изобретения является повышение точности определения параметров движения астероида, путем использования сложных сигналов с фазовой манипуляцией, приемных антенн, размещенных в азимутальной плоскости по окружности с возможностью их электронного вращения вокруг приемопередающей антенны, размещенной в центре окружности, и двух приемных антенн, размещенных в угломестной плоскости. 2 ил.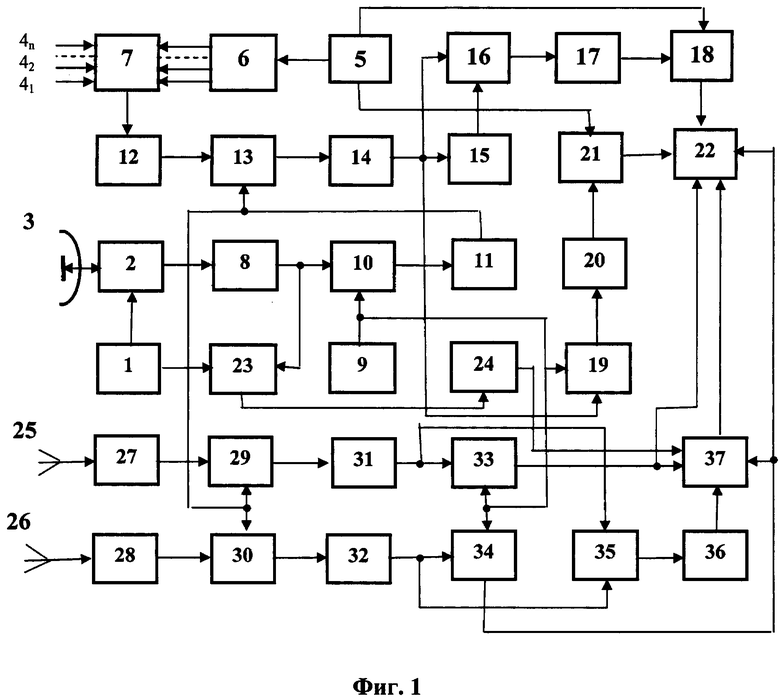
Система определения параметров движения астероида, содержащая передатчик, четыре приемных антенны, расположенные на окружности, на равном удалении по окружности друг от друга, последовательно включенные смеситель и фильтр разностной частоты, первый и второй фазовые детекторы, отличающаяся тем, что она снабжена m приемными антеннами, размещенными по окружности в азимутальной плоскости, двумя приемными антеннами, размещенными в угломестной плоскости, приемопередающей антенной, размещенной в центре окружности, дуплексером, опорным генератором, генератором импульсов, электронным коммутатором, четырьмя усилителями высокой частоты, шестью перемножителями, четырьмя полосовыми фильтрами, линией задержки, фазовращателем на 90°, блоком регистрации, третьим, четвертым и пятым фазовыми детекторами, фильтром нижних частот, фазометром и вычислительным блоком, причем к первому выходу опорного генератора последовательно подключены генератор импульсов, электронный коммутатор, n входов которого соединены с n=4+m приемных антенн, равномерно размещенных по окружности радиусом d с возможностью электронного их вращения вокруг приемопередающей антенны, размещенной в центре окружности, второй усилитель высокой частоты, первый перемножитель, второй вход которого соединен с выходом фильтра разностной частоты, первый полосовой фильтр, линии задержки, первый фазовый детектор, второй вход которого соединен с выходом первого полосового фильтра, фазовращатель на 90°, второй фазовый детектор, второй вход которого соединен со вторым выходом опорного генератора, и блок регистрации, к первому выходу передатчика последовательно подключены дуплексер, вход-выход которого связан с приемопередающей антенной, и первый усилитель высокой частоты, выход которого соединен с первым входом смесителя, к второму входу которого подключен выход гетеродина, к выходу первого полосового фильтра последовательно подключены второй перемножитель, второй вход которого соединен с выходом гетеродина, второй полосовой фильтр и третий фазовый детектор, второй вход которого соединен с третьим выходом опорного генератора, а выход подключен к второму входу блока регистрации, к второму входу передатчика последовательно подключены третий перемножитель, второй вход которого соединен с выходом первого усилителя высокой частоты, фильтр нижних частот и вычислительный блок, выход которого соединен с третьим входом блока регистрации, к первой приемной антенне, размещенной в угломестной плоскости, последовательно подключены третий усилитель высокой частоты, четвертый перемножитель, второй вход которого соединен с выходом фильтра разностной частоты, третий полосовой фильтр и четвертый фазовый детектор, второй вход которого соединен с выходом гетеродина, а выход подключен к четвертому входу блока регистрации и к второму входу вычислительного блока, к второй приемной антенне, размещенной в угломестной плоскости, последовательно подключены четвертый усилитель высокой частоты, пятый перемножитель, второй вход которого соединен с выходом фильтра разностной частоты, четвертый полосовой фильтр и пятый фазовый детектор, второй вход которого соединен с выходом гетеродина, а выход подключен к пятому входу блока регистрации и к третьему входу вычислительного блока, к выходу третьего полосового фильтра последовательно подключены шестой перемножитель, второй вход которого соединен с выходом четвертого полосового фильтра, и фазометр, выход которого соединен с четвертым входом вычислительного блока.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АСТЕРОИДА | 2014 |
|
RU2568628C2 |
| RU 2013135514 A, 10.02.2015 | |||
| US 7821446 B2, 26.10.2010. | |||

