Изобретение относится к области пожарной техники, в частности к автоматическим мобильно-позиционированным роботизированным комплексам локального пожаротушения, и может быть использовано для комбинированного пожаротушения технологических сооружений, складов и наружных объектов в автоматическом и дистанционном режимах управления с использованием водопенного лафетного ствола с дистанционным управлением и порошковой установки, доставляемых мобильной транспортной тележкой непосредственно в зону пожаротушения.
На сегодняшний день на рынке существуют различные системы пожаротушения, подразделяемые на системы тушения объемным способом и поверхностным. Такие системы включат в себя большое количество составляющих. Процесс пожаротушения производится на всей защищаемой площади установки и не может происходить избирательным способом, а также в труднодоступных местах (туннели, кабельные эстакады, каналы и другие сооружения и установки).
Выбор огнетушащего вещества и типа системы, как правило, определяется на основании характеристик защищаемого объекта, плотности и характера размещения оборудования и коммуникаций в нем.
Согласно требованиям регламентирующих документов, а также испытаниям, производимым специализированными организациями, спринклерные оросители (насадки-распылители огнетушащего вещества) допускается устанавливать в помещениях с высотой, не превышающей 20 м. Это обусловлено отсутствием наличия достаточной температуры для срабатывания (вскрытия легкоплавкого замка-колбы) оросителя на высоте, превышающей 20 м от очага пожара.
Вместе с тем значительная часть зданий имеет высоту, превышающую нормативно допустимые 20 м, что делает невозможным применение на этих объектах систем спринклерного пожаротушения. К таким объектам относится подавляющее большинство промышленных, складских зданий, крупных спортивные объектов (стадионы, дворцы спорта и т.п.). Большую высоту имеют складские здания, а также производственные, это обусловлено технологическими процессами, происходящими на объекте: высотное складирование, производство, где необходимо применение мостовых кранов для перемещения грузов.
Для таких случаев единственно возможным методом автоматического пожаротушения является применение роботизированных комплексов, у которых в блоке тушения отсутствуют средства, зависимые от температурных перепадов, а пуск установки осуществляется, в том числе, от системы сигнализации. В этом случае нет зависимости от температурного режима в здании, а источником побуждения установки является не повышенная температура, которая разбивает колбу, а система сигнализации (обнаружение пожара). Условия применения стационарных роботизированных комплексов также обусловлены конструктивными особенностями здания, такими как достаточно большое количество технологического оборудования, кранов-балок для технологических процессов, наличие большой концентрации смежных инженерных сетей. При размещении роботизированных пожарных комплексов (РПК) достаточно размещения их на платформе вдоль периметра здания либо колонн. Количество роботов определяется в ходе проектирования с учетом дальности струи и радиуса действия. При этом применяемое оборудование не должно мешать производственно-техническому процессу в здании.
Вместе с тем, применение РПК, производимых в настоящее время, не всегда является экономически и эстетически целесообразным за счет ограниченной площади действия ввиду стационарности, а также необходимости устройства отдельно стоящих платформ под каждый РПК.
Известен роботизированный пожарный комплекс, содержащий две и более роботизированные установки пожаротушения, включающие в себя лафетный ствол с приводами вертикального и горизонтального наведения, насадок с приводом изменения угла распыливания струи и местный пульт управления, которые соединены с блоком коммутации на входе, а на его выходе - с устройством управления, в котором формируются управляющие команды по наведению ствола и пожаротушению. Устройство обнаружения загорания и теленаблюдения установлено на стволе так, что его оптическая ось сориентирована в направлении подачи огнетушащего вещества, которое соединено с устройством обработки видеосигнала, в котором программно реализуются алгоритмы определения координат очага загорания. Устройство обработки видеосигнала соединено с видеоконтрольным устройством и устройством управления. Роботизированные установки пожаротушения установлены таким образом, что каждая точка защищаемой зоны орошается не менее чем двумя струями и контролируется двумя устройствами обнаружения загорания и теленаблюдения. На лафетных стволах дополнительно установлены дисковый затвор с приводом и датчик давления, соединенные с блоком коммутации на входе, выход которого соединен с устройством управления (RU 2319530, 20.03.2008).
Техническая проблема, на решение которой направлено предложенное изобретение, заключается в повышении эксплуатационных характеристик и в расширении арсенала технических средств роботизированных установок пожаротушения, параметры, характеристики которых обеспечивает комбинированный способ подачи огнетушащего вещества, которые способны в автоматическом режиме обнаруживать и подавлять первичные очаги возгорания на участках местного (локального) масштаба, перемещаясь по направляющим непосредственно в зону пожаротушения в пределах защищаемого помещения.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении эксплуатационных характеристик заявленной системы пожаротушения за счет обеспечения комбинированного способа пожаротушения водопенными и порошковыми средствами с помощью передвижного мобильного устройства, передвигающегося по сети рельсовых ходов, проложенных по территории защищаемого здания/сооружения, за счет обеспечения избирательности тушения очага возгорания с минимальными затрачиваемыми ресурсами, так как процесс полностью автоматизирован, но при этом может контролироваться со стороны человека (оператора), и за счет применение двух видов огнетушащего вещества.
Указанный технический результат достигается в автоматической роботизированной системе локального пожаротушения, состоящей из стационарной автоматической системы пожарной сигнализации для обнаружения очага возгорания, содержащей дифференциальный термочувствительный кабель; сети трубопроводов для подачи водопенного огнетушащего вещества с установленной запорной арматурой, сливными устройствами для опорожнения системы и распределенными питающими коннекторами; и мобильного передвижного роботизированного устройства, содержащего транспортное средство, выполненное с возможностью перемещения по транспортной магистрали и оборудованное двумя модулями порошкового пожаротушения; лафетным водопенным стволом с дистанционным управлением с блоком программного управления; системой видеонаблюдения в видимом и ИК диапазонах; механизмом подключения к питающим коннекторам для подачи огнетушащего вещества на лафетный ствол; системой контроля давления; сервоприводом для перемещения по транспортной магистрали и шкафом питания и управления, который выполнен с возможностью получения сигнала от стационарной автоматической системы пожарной сигнализации и в котором формируются управляющие команды на старт работы мобильного передвижного роботизированного устройства.
Сеть трубопроводов (система подачи воды) совмещена с транспортной магистралью.
Стационарная автоматическая система пожарной сигнализации содержит модуль интерфейсный пожарный и линейный тепловой извещатель.
Автоматическая роботизированная система локального пожаротушения включает кабели системы автоматики, шкаф питающего контроллера, автоматизированное рабочее место (АРМ) оператора, приемно-контрольные приборы автоматической пожарной сигнализации (АПС).
АРМ включает персональный компьютер, со специальным программным обеспечением.
В качестве модуля порошкового пожаротушения используют порошковую установку импульсного пожаротушения типа МПП(Н)-24-И-ГЭ-У2.
Механизм подключения содержит запорную и соединительную арматуру, в качестве которой используют соединительный клапан и задвижку с электроприводом, устройство обнаружения и захвата патрубка врезки трубопровода, механизм стыковки конус-конус, механизм подключения с клапаном на открывание подачи воды.
В качестве огнетушащего вещества используют воду и/или раствор пенообразователя.
В качестве системы контроля давления используют датчик давления воды с Modbus RTU.
Система видеонаблюдения содержит тепловизор, установленный на лафетном стволе, и видеомультиплексор.
В качестве тепловизора используют камеру Quark 640 f=9 Гц, объектив 19 мм.
Транспортная магистраль содержит направляющие в виде рельсов для перемещения по ним посредством сервопривода мобильного передвижного роботизированного устройства от места базирования на протяжении защищаемой зоны.
Лафетный водопенный ствол предназначен для формирования сплошной или распыленной с изменяемым углом факела струи воды, а также струй раствора пенообразователя низкой кратности.
В качестве транспортного средства используют подвижную тележку, выполненную в виде рамной цельносварной конструкции с площадками и установкой на ней всех подвесных и монтируемых элементов системы и содержащую механизм передвижения, состоящий из приводной и неприводной тележек, двух редукторов, соединенных между собой при помощи проставки и трех стяжек, один из которых является ведущим с установленным на нем сервоприводом.
Таким образом, в автоматической роботизированной системе локального пожаротушения реализуется возможность комбинированного способа подачи огнетушащего вещества, что повышает эффективность заявленной системы, поскольку предусмотрено применение двух видов огнетушащего вещества, а процесс тушения пожара поделен на два этапа. Первый - локализация очага возгорания посредством направленного потока порошкового огнетушащего вещества из модуля, установленного на платформе вместе с лафетным стволом. После выпуска порошка наступает второй этап тушения - дотушивание - основной - водой или раствором пенообразователя посредством лафетного ствола.
Также автоматическая роботизированная система локального пожаротушения способна в автоматическом режиме обнаруживать и подавлять первичные очаги возгорания, точно выполнять команды управления, при этом обеспечивается избирательность тушения очага возгорания с минимальными затрачиваемыми ресурсами, при этом процесс полностью автоматизирован, но также может контролироваться со стороны человека (оператором).
Все вышеперечисленное в целом расширяет арсенал известных технических средств и повышает эксплуатационные характеристики заявленной системы пожаротушения.
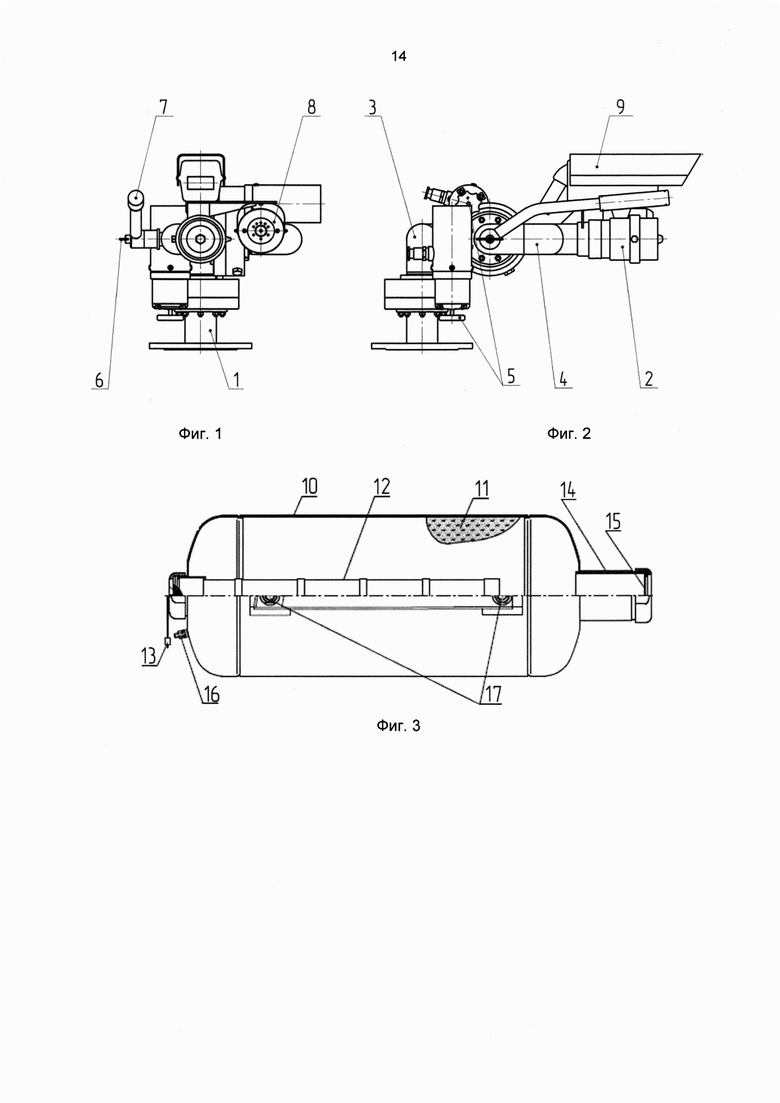
Сущность изобретения поясняется чертежами, где на фиг. 1 и 2 изображен лафетный ствол с дистанционным управлением; на фиг. 3 - модуль порошкового пожаротушения.
В состав втоматической роботизированной системы локального комбинированного пожаротушения входит:
- Стационарная автоматическая система пожарной сигнализации с использованием дифференциального термочувствительного кабеля - Модуль интерфейсный пожарный (МИП - 2И (МИП - 2И-Ех)) и Линейный тепловой извещатель (ИП104 «Гранат - термокабель», GTSW - 68 (-СР));
- Транспортная магистраль - система направляющих для передвижения мобильного передвижного роботизированного устройства от места базирования на протяжении защищаемой зоны;
- Сеть трубопроводов с установленной запорной арматурой, сливными устройствами для опорожнения системы и распределенными питающими коннекторами (узлами соединения мобильного передвижного роботизированного устройства с трубопроводом);
- Кабели системы автоматики;
- Шкаф питающего контроллера;
- Шкаф питания и управления;
- АРМ оператора;
- Приемно-контрольный прибор автоматической пожарной сигнализации (АПС);
- Мобильное передвижное роботизированное устройство, состоящее из:
1. Модуля порошкового пожаротушения - Порошковой установки импульсного пожаротушения МПП(Н)-24-И-ГЭ-У2 - 2 комплекта. Модуль порошкового пожаротушения предназначен для автоматического подавления очагов пожара классов А (твердых веществ), В (жидких веществ), С (газообразных веществ) и Е (электрооборудования, находящегося под напряжением без учета параметра пробивного напряжения огнетушащего порошка),
2. Лафетного ствола ЛСД-С40У с дистанционным управлением - 1 комплект. Лафетный ствол является водопенным, универсальным, с дистанционным управлением, стационарным и предназначен для формирования сплошной или распыленной с изменяемым углом факела струи воды, а также струй воздушно-механической пены низкой кратности. Лафетный ствол применяется для тушения пожаров, для защиты шаровых и цилиндрических резервуаров с горючими сжиженными газами, горючими и легковоспламеняющимися жидкостями на товарных, сырьевых и промежуточных складах; наружных взрывоопасных и пожароопасных установок в целях защиты оборудования и аппаратуры, содержащих горючие газы, горючие и легковоспламеняющиеся жидкости; сливоналивных железнодорожных эстакад и некоторых речных причалов; многих других объектов.
3. Системы видеонаблюдения в видимом и ИК диапазонах - Камера Quark 640 f=9Гц, объектив 19 мм,
4. Механизма подключения к врезкам трубопровода для подачи воды на лафетный ствол, включающий в себя: запорную и соединительную арматуру - соединительный клапан, задвижка с электроприводом; устройство обнаружения и захвата патрубка врезки трубопровода; механизм стыковки конус-конус; механизм подключения с клапаном на открывание подачи воды; шкаф управления, выполненный в виде отдельного элемента, установленного на несущей раме. В состав шкафа входит токовводная группа с общим вводным автоматом, контроллером с системой передачи данных по протоколу RS на внешний пульт оператора, блоком питания,
5. Системы контроля давления в системе - Датчик давления воды с Modbus RTU,
6. Транспортного средства - системы передвижения по транспортной магистрали (направляющим) в пределах защищаемого пространства с сервоприводом.
Все элементы мобильного передвижного роботизированного устройства защищены от потенциальных повреждений.
Транспортная магистраль - система рельсов для передвижения автоматического мобильного передвижного роботизированного устройства рассчитана на нагрузки конструкторским отделом с учетом веса и габаритов передвигающегося опытного образца автоматической мобильной роботизированной системы локального пожаротушения, а также внешних факторов.
Виды огнетушащих веществ: вода, пена низкой кратности (кратность не ниже 5), порошок.
Мобильное передвижное роботизированное устройство представляет собой транспортное средство (подвижную тележку) и конструктивно выполнено в виде рамной цельносварной конструкции с площадками и установкой на ней всех подвесных и монтируемых элементов системы пожаротушения. Каркас рамы составляет профильная труба 50×50 мм, сталь 3, обеспечивающая жесткость конструкции. Каркас обшивается листовым металлом толщиной от 3 до 10 мм, сталь 10, Площадки установки оборудования имеют жесткие сварные или болтовые крепления с основной рамой. Механизм передвижения транспортного средства состоит из приводной и неприводной (холостой) тележек. Тележки осуществляют передвижение по нижним полкам двутавровых балок 30М, 36М, 45М ГОСТ 19425-74. Шарнирное соединение тележек с траверсой позволяет свободно проходить по криволинейным участкам пути. Приводная тележка состоит из двух редукторов, соединенных между собой при помощи проставки и трех стяжек. На правом ведущем редукторе установлен серводвигатель. Левому редуктору движение передается специальным валиком. Тихоходные валы редукторов приводят в движение катки. Холостая тележка состоит из траверсы и двух кронштейнов, на которых смонтированы катки. На редукторах приводной тележки и на кронштейнах холостой тележки имеются ролики, которые совместно с ребордами катков служат для направления тележек по монорельсу. Регулировка расстояния между ребордами катков и направляющими роликами для балок с различной шириной полок осуществляется путем переустановки регулировочных колец.
Лафетный ствол состоит из входного патрубка с фланцем крепления 1, корпуса 3, выходного патрубка 4, соединенных между собой шарнирными соединениями с уплотнительными кольцами. Крепление ствола к трубопроводной системе осуществляется с помощью фланца. К выходному патрубку прикреплен потокоформирующий насадок 2, обеспечивающий требуемую геометрию струи: от сплошной до распыленной с углом факела 100°. По согласованию с потребителем ствол может комплектоваться:
- потокоформирующим насадком постоянного расхода огнетушащего вещества с ручным или дистанционным управлением.
- потокоформирующим насадком с регулируемым расходом огнетушащего вещества (от 0 до номинального расхода) с ручным или дистанционным управлением.
Управление лафетным стволом возможно осуществлять с пульта дистанционного управления - оператора. Степень защиты оболочки пульта дистанционного управления персонала (ПДУ-П) не менее IP 67. Он предназначен для эксплуатации в тяжелых условиях на открытом воздухе.
В аварийных случаях в конструкции лафетного ствола предусмотрена возможность ручного управления. Для перевода ствола в режим ручного управления необходимо закрутить "винт барашек" 5 по часовой стрелке до упора. Ослабить фиксатор 6 рукоятки ручного управления 7 и повернуть рукоятку ручного управления в удобное для ствольщика положение. Затянуть фиксатор рукоятки. Для обратного перевода ствола в режим дистанционного управления необходимо убедиться, что положение ствола находится в диапазоне углов. Вывернуть до упора (не прилагая чрезмерных усилий) "винт барашек" против часовой стрелки. После включения привода перемещения ствола в горизонтальном и вертикальном направлениях произойдет зацепление шестерней муфты, и ствол перейдет в режим дистанционного управления. Для работы лафетного ствола в составе мобильного передвижного роботизированного устройства лафетный ствол может быть укомплектован видеокамерой 8 и извещателем пламени 9.
Модуль порошкового пожаротушения МПП состоит из корпуса 10, в котором размещаются огнетушащий порошок (ОП) 11 и источник холодного газа (ИХГ) 12 с элементом электропусковым 13. В передней части корпуса находится насадок-распылитель 14, выходное отверстие которого перекрыто мембраной 15. Модуль имеет заземляющий зажим 16. На боковой поверхности корпуса имеются четыре резьбовые оси 17 для крепления опор, обеспечивающих регулирование угла наклона МПП и его установку на стапеле.
Управление мобильным передвижным роботизированным устройством непосредственно на объекте защиты должно осуществляться в дистанционном режиме с пункта круглосуточного дежурства оператора - АРМ.
В режиме ожидания (до возникновения пожара) в защищаемых помещениях в качестве чувствительного элемента стационарной автоматической системы пожарной сигнализации принимается дифференциальный термочувствительный кабель. В случае возникновения пожара стационарная автоматическая система пожарной сигнализации ввиду ее адресности осуществляет обнаружение очага возгорания с точностью 1-2 метра. Сигнал от системы передается в шкаф питания и управления, вследствие чего формируется команда на старт работы мобильного передвижного роботизированного устройства, а именно: выдвижение его по системе направляющих в уже определенную ранее зону очага возгорания.
После окончания позиционирования мобильного передвижного роботизированного устройства, при его вхождении в заданную зону, включается программа поиска очага загорания, а узконаправленные устройства обнаружения загорания при наведении на очаг загорания выдают сигналы о его координатах. Шкаф питания и управления осуществляет передачу сигнала мобильному передвижному роботизированному устройству на подачу порошкового огнетушащего состава из двух установленных модулей порошкового пожаротушения, находящихся на борту мобильного передвижного роботизированного устройства.
Указанное порошковое тушение является предварительным - подготовительным к основному водой/раствором пенообразователя. По окончании предварительного тушения мобильное передвижное роботизированное устройство осуществляет поиск ближайшего узла стыковки с сетью трубопроводов с основным огнетушащим веществом и передвигается к нему. После достижения найденной точки стыковки осуществляется автоматическое подключение к трубопроводу. Подключение мобильного передвижного роботизированного устройства к трубопроводу при помощи питающего коннектора (стыковочного узла) происходит механически при скольжении мобильного передвижного роботизированного устройства по направляющим (рельсам) в противоположном направлении.
Посредством датчика давления воды, размещаемого на мобильном передвижном роботизированном устройстве, осуществляется проверка рабочих параметров системы (давление на входе). В случае если давление является недостаточным, осуществляется формирование командных импульсов на проверку состояния работы насосных агрегатов и системы запорной арматуры.
Управление лафетным стволом - элементом тушения, его позиционирование и наведение на обнаруженный очаг возгорания осуществляется диспетчером-оператором в дистанционном режиме. На АРМ оператора передается изображение с камер, установленных на мобильном передвижном роботизированном устройстве, после чего, проанализировав ситуацию, оператор подает команду через пульт управления на пуск насосного оборудования, а также на открытие задвижки с электроприводом, установленной на сети трубопроводов, вода/раствор пенообразователя подается на очаг возгорания. Для видеоконтроля на лафетный ствол устанавливается тепловизор, который вместе с лафетным стволом наводится на очаг загорания и передает оператору видеоинформацию о состоянии объекта в данной зоне для принятия решений.
После локализации пожара оператор выдает команду на остановку насосного оборудования, закрытие запорной арматуры. Осуществляется отсоединение мобильного передвижного роботизированного устройства от сети трубопроводов, далее данное устройство возвращается к месту своего постоянного размещения в режиме ожидания.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| Способ тушения пожаров многофункциональным робототехническим комплексом при авариях в тоннелях | 2024 |
|
RU2834501C1 |
| СПОСОБ ТУШЕНИЯ ПОЖАРА С ИСПОЛЬЗОВАНИЕМ ГРУППИРОВКИ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ | 2018 |
|
RU2680131C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ С ТРАНСПОРТИРОВКОЙ СРЕДСТВ ПОЖАРОТУШЕНИЯ К ОЧАГУ ПОЖАРА ПОДЪЕМНО-ТРАНСПОРТНЫМ ОБОРУДОВАНИЕМ ЗАЩИЩАЕМОГО ОБЪЕКТА | 2010 |
|
RU2435621C2 |
| Автономный пожарный модуль контейнерного типа | 2023 |
|
RU2813419C1 |
| Пожарный поезд с автономным пожарным модулем контейнерного типа | 2023 |
|
RU2819950C1 |
| Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса | 2023 |
|
RU2814057C1 |
Изобретение относится к области пожарной техники, в частности к автоматическим мобильно-позиционированным роботизированным комплексам локального пожаротушения, и направлено на повышение эксплуатационных характеристик, расширение арсенала технических средств. Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения, характеризующаяся тем, что состоит из стационарной автоматической системы пожарной сигнализации для обнаружения очага возгорания, содержащей дифференциальный термочувствительный кабель; сети трубопроводов с огнетушащим веществом и установленной запорной арматурой, сливными устройствами для опорожнения системы и распределенными питающими коннекторами; и мобильного передвижного роботизированного устройства, содержащего транспортное средство, выполненное с возможностью перемещения по транспортной магистрали и оборудованное двумя модулями порошкового пожаротушения; лафетным водопенным стволом с дистанционным управлением и блоком программного управления; системой видеонаблюдения в видимом и ИК диапазонах; механизмом подключения к питающим коннекторам для подачи огнетушащего вещества на лафетный ствол; системой контроля давления; сервоприводом для перемещения по транспортной магистрали и шкафом питания и управления, который выполнен с возможностью получения сигнала от стационарной автоматической системы пожарной сигнализации и в котором формируются управляющие команды на старт работы мобильного передвижного роботизированного устройства. 13 з.п. ф-лы, 3 ил.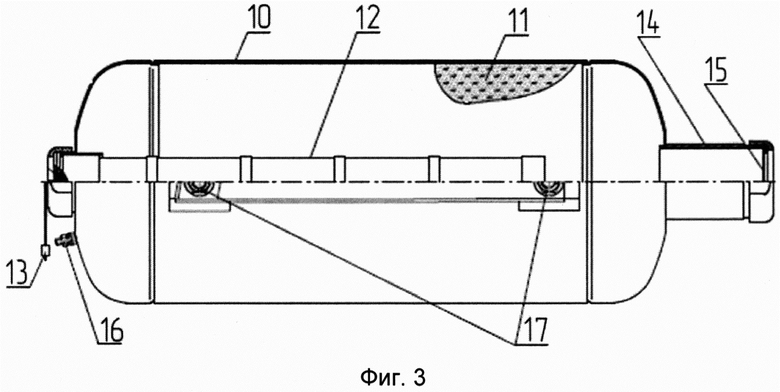
1. Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения, характеризующаяся тем, что состоит из стационарной автоматической системы пожарной сигнализации для обнаружения очага возгорания, содержащей дифференциальный термочувствительный кабель; сети трубопроводов для подачи водопенного огнетушащего вещества с установленной запорной арматурой, сливными устройствами для опорожнения системы и распределенными питающими коннекторами; и мобильного передвижного роботизированного устройства, содержащего транспортное средство, выполненное с возможностью перемещения по транспортной магистрали и оборудованное двумя модулями порошкового пожаротушения; лафетным водопенным стволом с дистанционным управлением с блоком программного управления; системой видеонаблюдения в видимом и ИК диапазонах; механизмом подключения к питающим коннекторам для подачи огнетушащего вещества на лафетный ствол; системой контроля давления; сервоприводом для перемещения по транспортной магистрали и шкафом питания и управления, который выполнен с возможностью получения сигнала от стационарной автоматической системы пожарной сигнализации и в котором формируются управляющие команды на старт работы мобильного передвижного роботизированного устройства.
2. Система по п. 1, характеризующаяся тем, что сеть трубопроводов совмещена с транспортной магистралью.
3. Система по п. 1, характеризующаяся тем, что стационарная автоматическая система пожарной сигнализации содержит модуль интерфейсный пожарный и линейный тепловой извещатель.
4. Система по п. 1, характеризующаяся тем, что включает кабели системы автоматики, шкаф питающего контроллера, автоматизированное рабочее место (АРМ) оператора, приемно-контрольные приборы АПС.
5. Система по п. 4, характеризующаяся тем, что АРМ включает персональный компьютер с программным обеспечением.
6. Система по п. 1, характеризующаяся тем, что в качестве модуля порошкового пожаротушения используют порошковую установку импульсного пожаротушения типа МПП(Н)-24-И-ГЭ-У2.
7. Система по п. 1, характеризующаяся тем, что механизм подключения содержит запорную и соединительную арматуру, в качестве которой используют соединительный клапан и задвижку с электроприводом, устройство обнаружения и захвата патрубка врезки трубопровода, механизм стыковки конус-конус, механизм подключения с клапаном на открывание подачи воды.
8. Система по п. 1, характеризующаяся тем, что в качестве огнетушащего вещества используют воду и/или раствор пенообразователя.
9. Система по п. 1, характеризующаяся тем, что в качестве системы контроля давления используют датчик давления воды с Modbus RTU.
10. Система по п. 1, характеризующаяся тем, что система видеонаблюдения содержит тепловизор, установленный на лафетном стволе, и видеомультиплексор.
11. Система по п. 10, характеризующаяся тем, что в качестве тепловизора используют камеру Quark 640 f=9 Гц, объектив 19 мм.
12. Система по п. 1, характеризующаяся тем, что транспортная магистраль содержит направляющие в виде рельсов для перемещения по ним посредством сервопривода мобильного передвижного роботизированного устройства от места базирования на протяжении защищаемой зоны.
13. Система по п. 1, характеризующаяся тем, что лафетный водопенный ствол предназначен для формирования сплошной или распыленной с изменяемым углом факела струи воды, а также струй раствора пенообразователя низкой кратности.
14. Система по п. 1, характеризующаяся тем, что в качестве транспортного средства используют подвижную тележку, выполненную в виде рамной цельносварной конструкции с площадками и установкой на ней всех подвесных и монтируемых элементов системы и содержащую механизм передвижения, состоящий из приводной и неприводной тележек, двух редукторов, соединенных между собой при помощи проставки и трех стяжек и один из которых является ведущим с установленным на нем сервоприводом.
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| СИСТЕМА ПОЖАРНОЙ СИГНАЛИЗАЦИИ С ЛИНЕЙНЫМИ ДЕТЕКТОРАМИ, ОСНОВАННАЯ НА СЛИЯНИИ ДАННЫХ, И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТАКОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2376644C2 |
| CN 105013115 A, 04.11.2015 | |||
| CN 102078670 A, 01.06.2011 | |||
| CN 202724513 U, 13.02.2013. | |||

