Изобретение относится к автоматическим установкам пожаротушения в соответствии со сводом правил «Системы противопожарной защиты. Установки пожаротушения автоматические. Нормы и правила проектирования» СП 485.1311500.2020, а именно к роботизированным установкам пожаротушения (далее – РУП), объединенным общей системой контроля, управления и обнаружения пожара, и может быть использовано дополнительно для предупреждения пожаро- и взрывоопасных ситуаций, а также ограничения воздействия опасных факторов пожара на людей, оборудование и конструкции производственных зданий, помещений и установок, в том числе машинных залов АЭС.
Известен, например, роботизированный пожарный комплекс по патенту № 2319530 и роботизированный пожарный комплекс с полнопроцессной системой управления по патенту № 2424837.
Недостатком известных устройств является узкая область применения, ограниченная техническими и функциональными возможностями устройств для решения конкретных задач, а также применяемой при их работе в качестве огнетушащего вещества (далее ОТВ) только воды и раствора пенообразователя, что сужает перечень решаемых задач по защите объектов от пожаров, например, в части осуществления эффективного и безопасного тушения электрооборудования под напряжением.
Наиболее близким по технической сущности является многофункциональный робототехнический комплекс (далее МРТК) по патенту № 2773482, содержащий пожарный водопровод, подключенный к насосной станции, и входящие в состав РУП, соединенные с пенным трубопроводом, по крайней мере, два роботизированных пожарных ствола (ПРС), с установленными на входе перед каждым ПРС управляемыми дисковыми затворами с приводами: один для подачи воды, другой для подачи компрессионной пены, и переносной пульт управления, соединенные с блоком коммутации на входе, а на его выходе по каналу связи с сетевым контроллером, который на входе также соединен с системой контроля концентрации газов с подключенными к нему газоанализаторами, а на выходе с устройством управления МРТК, установленное на каждом ПРС устройство обнаружения загорания и теленаблюдения, соединенные двухканальной телевизионной связью (видеоканал и ИК-канал) с устройством цифровой обработки сигнала, соединенное на входе с системой предупредительного мониторинга и системой блиц-мониторинга, а на выходе - с видеоконтрольным устройством и системой процессного управления пожаротушением, соединенной на входе с блоком адаптивного управления пожаротушением, а на выходе с устройством управления МРТК, которое соединено с системой удаленного доступа через приемно-контрольное устройство с пожарными извещателями и через блок управления со станцией компрессионной пены, пенный трубопровод от которой подключен пожарным рукавом к мобильной роботизированной установке пожаротушения (далее МРУП).
Недостатком данного роботизированного пожарного комплекса являются ограниченные возможности по обнаружению и ликвидации пожаров и техногенных выбросов вследствие аварий и разрушений защищаемых помещений с их выходом в наружную зону, что связано с отсутствием технических средств по обнаружению возгораний и определению радиоактивных и химически зараженных зон на наружных объектах и недостаточным количеством сил и средств для оперативного реагирования на аварийных участках, входящих в систему комплексной защиты объекта.
Основными задачами настоящего изобретения являются:
- оперативное реагирование на пожары, взрывы и аварии, выходящие за пределы защищаемых помещений вследствие разрушения конструкции и утечек опасных веществ и материалов, для предотвращения развития и ликвидации последствий аварийных событий с учётом координации работ в комплексе с РУП, за счет введения дополнительных технических средств по обнаружению возгораний и мобильных дистанционно-управляемых и робототехнических средств;
- минимизация рисков воздействия опасных факторов пожаров, аварий и их сопутствующих проявлений на персонал объекта защиты и пожарных, привлеченных к ликвидации;
- предотвращение развития пожаров и расширения аварийных зон с радиоактивными и химическими заражениями, и, как следствие, недопустимого экономического ущерба защищаемым объектам.
Техническим результатом настоящего изобретения является расширение возможностей применения многофункционального робототехнического комплекса МРТК по патенту № 2773482, в том числе по оперативному реагированию на развитие пожаров, взрывов и аварий наружу, за пределы защищаемых помещений, по мониторингу наружных потенциально опасных зон возникновения возгорания с видеоконтролем аварийной обстановки, снижению развития аварийных ситуаций и предотвращению расширения зон с радиоактивными и химическими заражениями.
Так, в составе предлагаемого изобретения имеется возможность интегрировать и эффективно применять не только МРТК по патенту № 2773482, но и РУП по патенту № 2128536, пожарный монитор возимый по патенту № 2372124, пожарный монитор с осциллятором по патенту № 2375094, дистанционно-управляемый пожарный автомобиль радиационной и химической разведки и тушения пожаров, пожарный квадрокоптер.
Также к техническому результату заявляемого изобретения можно отнести применение в мобильных устройствах пожаротушения компрессионной пены, значительно облегчающей развертывание рукавных линий и передислокацию и маневрирование мобильных устройств с пенозаполненными рукавами, которые в 7 раз легче рукавов с раствором пенообразователя.
В этой связи результат расширения возможностей применения МРТК по оперативному реагированию на развитие пожаров, взрывов и аварий наружу за пределы защищаемых помещений, достигается за счет того, что в МРТК вводится мобильный роботизированный комплекс (далее – МРК), с центральным пультом управления МРК (далее – ЦПУ), соединенным с устройством управления МРТК и по радиоканалу с МРУП, с включением в состав МРК МРУП с расширенными функциональными возможностями по доставке к месту аварии дополнительных мобильных устройств в составе возимых РУП по патенту № 2128536, связанных по радиоканалу с ЦПУ, возимых пожарных мониторов по патенту № 2372124 и возимых пожарных мониторов с осцилляторами по патенту № 2375094, соединенных облегченными пожарными рукавами с компрессионной пеной через запорное устройство с пенным трубопроводом.
Для радиационной и химической разведки и тушения пожаров в состав МРК дополнительно введен дистанционно-управляемый пожарный автомобиль аварийно-спасательных работ АСР, включающий в себя лафетный ствол с блоком дистанционного управления, прибор радиометрического контроля по определению интенсивности ионизирующего излучения радиоактивных веществ, связанные по радиоканалу с ЦПУ, и пожарный рукав, подключенный соединительной головкой к лафетному стволу и через водозапорный клапан к пенному трубопроводу.
Для мониторинга наружных потенциально опасных зон за пределами защищаемых помещений и видеоконтроля аварийной обстановки дополнительно введен пожарный квадрокоптер, включающий в себя двухканальную камеру в ИК- и видеодиапазоне, соединенную с гиростабилизированным подвесом и с блоком определения координат загорания, которые соединены с полетным контроллером с навигационной программой, соединенным с приемо-передатчиком, который также соединен с блоком определения координат загорания и по радиоканалу с пультом радиоуправления и с ЦПУ.
Внедрение многофункционального комплекса возможно не только на проектируемых и строящихся объектах защиты, но и для интеграции его компонентов в существующую систему противопожарного водоснабжения на действующих объектах, что является безусловным его преимуществом.
В этой связи, с учетом возможности использования тактико-технических характеристик как всех, так и отдельных элементов и средств, заложенных в МРТК, существенно расширяется область его эффективного применения не только в машинных залах АЭС, но и на объектах традиционной энергетики, а также на иных взрывопожароопасных объектах оборонной промышленности, судостроительной, авиационной, космической отрасли, на мусороперерабатывающих заводах, объектах газонефтехимии и других уникальных объектах.
Предлагаемое техническое решение – многофункциональный робототехнический комплекс на базе РУП и МРК – поясняется примером конкретного выполнения, описанным ниже. Приведенный пример не является единственно возможным, но наглядно демонстрирует возможность достижения данной совокупностью существенных признаков заявленного технического результата.
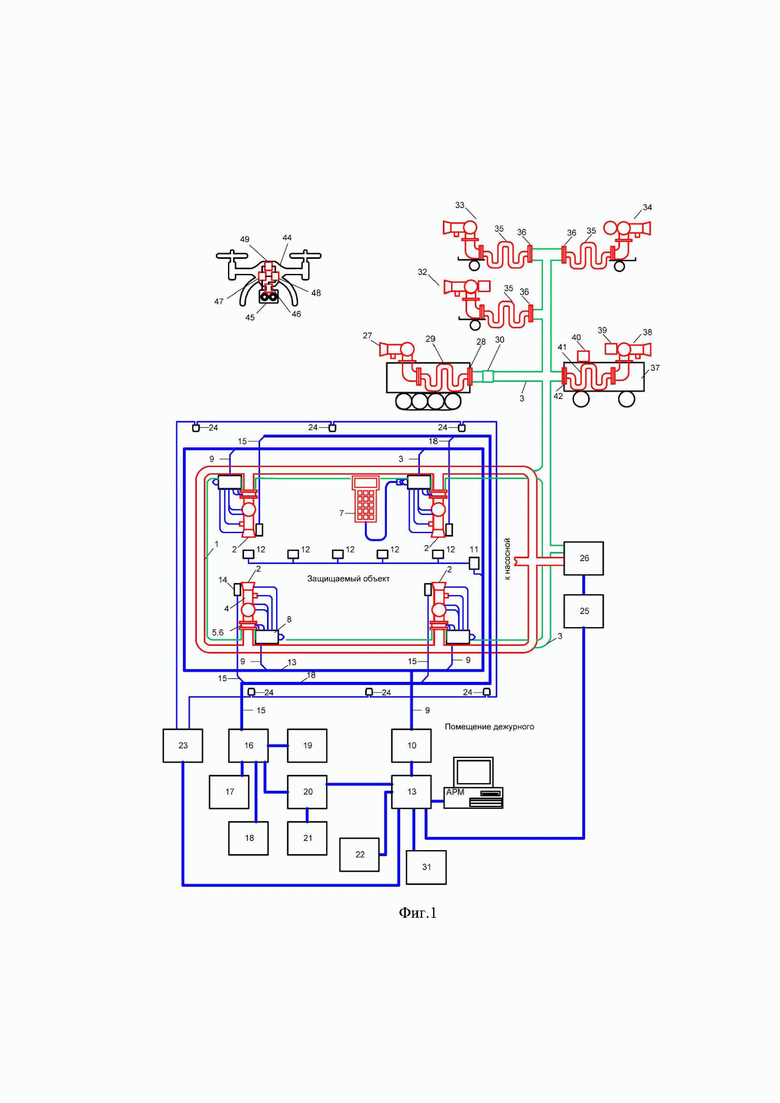
Сущность настоящего изобретения поясняется чертежом, на котором представлена схема многофункционального робототехнического комплекса противопожарной защиты производственных объектов на базе РУП и МРК на примере его размещения в машинном зале АЭС.
Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе РУП и МРК содержит пожарный водопровод 1, подключенный к насосной станции, входящие в состав роботизированной установки пожаротушения 2, соединенные с пенным трубопроводом 3 пожарные роботизированные стволы (ПРС) 4, с установленными на входе перед каждым ПРС 4 управляемыми дисковыми затворами с приводами: один для подачи воды 5, другой для подачи компрессионной пены 6, и переносной пульт управления 7, соединенные с блоком коммутации 8 на входе, а на его выходе по каналу связи 9 с сетевым контроллером 10, который на входе также соединен с системой контроля концентрации газов 11 с подключенными к нему газоанализаторами 12, а на выходе с устройством управления многофункционального робототехнического комплекса 13, установленные на каждом ПРС 4 устройства обнаружения загорания и теленаблюдения 14, соединенные двухканальной телевизионной связью 15 с устройством цифровой обработки сигнала 16, соединенное на входе с системой предупредительного мониторинга 17 и системой блиц-мониторинга 18, а на выходе с видеоконтрольным устройством 19 и системой процессного управления пожаротушением 20, соединенной на выходе с устройством управления МРТК 13, которое соединено с системой удаленного доступа 22, через приемно-контрольное устройство 23 с пожарными извещателями 24 и через блок управления 25 со станцией компрессионной пены 26. К пенному трубопроводу 3 также подключен МРУП 27, по патенту №2685319, с использованием телескопического манипулятора 28, стыкующего пожарный рукав 29 с соединительной головкой с водозапорным клапаном 30.
МРУП 27 связан по радиоканалу с ЦПУ 31, который соединен с устройством управления МРТК 13 и входит в состав МРК. МРУП имеет расширенные функциональные возможности по доставке к месту аварии дополнительных мобильных устройств в составе возимых РУП 32 по патенту № 2128536, связанных по радиоканалу с ЦПУ 31, возимых пожарных мониторов 33 по патенту № 2372124 и возимых пожарных мониторов с осцилляторами 34 по патенту № 2375094, подсоединенных через соединительную головку пожарными рукавами 35 через водозапорное устройство 36 к пенному трубопроводу 3.
Для радиационной и химической разведки и тушения пожаров в состав МРК дополнительно введен дистанционно-управляемый пожарный автомобиль 37 для аварийно-спасательных работ (АСР), включающий в себя лафетный ствол 38, блок дистанционного управления 39, прибор радиометрического контроля 40 по определению интенсивности ионизирующего излучения радиоактивных веществ, связанные по радиоканалу с ЦПУ 31, и пожарный рукав 41, подключенный соединительной головкой к лафетному стволу 38 и через водозапорный клапан 42 к пенному трубопроводу 3.
Для мониторинга наружных потенциально опасных зон за пределами защищаемых помещений и видеоконтроля аварийной обстановки дополнительно введен пожарный квадрокоптер 44, включающий в себя двухканальную камеру 45 в ИК- и видеодиапазоне, соединенную с гиростабилизированным подвесом 46 и с блоком определения координат загорания 47, которые соединены с полетным контроллером с навигационной программой 48, соединенным с приемо-передатчиком 49, который также соединен с блоком определения координат загорания 47 и по радиоканалу с пультом радиоуправления (не показано) и с ЦПУ 31.
Работа многофункционального робототехнического комплекса противопожарной защиты производственных объектов на базе РУП и МРК осуществляется следующим образом. При появлении на объекте защиты нагретых до температуры воспламенения зон, например, в результате неисправного технологического оборудования, система предупредительного мониторинга 17 по программе распознавания зон тепловыделения с учетом заранее введенного в программу оцифрованного местоположения вероятных теплоносителей (кабельные трассы, электроприборы, выключатели, технологическое оборудование и др.), передает информацию на устройство управления МРТК 13, которое подает команды на ближайшие ПРС 4 по их наведению на выделенную зону тепловыделения и передает оператору круглосуточного дежурства на видеоконтрольное устройство 19 информацию об аварийном состоянии участка зоны наблюдения и вероятном источнике тепловыделения.
Устройство управления МРТК 13 через сетевой контроллер 11 соединено также с системой контроля концентрации газов 11, к которой подключены газоанализаторы 12. При срабатывании первого предупредительного порога сигнализации информация от системы контроля концентрации газов 40 через сетевой контроллер 10 поступает в устройство управления МРТК 13 и далее передается оператору круглосуточного дежурства, который принимает меры по устранению утечки газа. При срабатывании второго аварийного порога сигнализации устройство управления МРТК 12 подает команду на ближайшие ПРС 4 по их наведению на зону повышенной концентрации газа по месту расположения сработавшего газоанализатора. ПРС 4 подают распыленную воду сканированием по площади заданной зоны для разряжения концентрации газа.
В целях определения и контроля работоспособности всех элементов многофункционального комплекса, устройство управления многофункциональным робототехническим комплексом 13 соединено с системой удаленного доступа диагностики неисправностей 22.
В дежурном режиме защищаемый объект находится под постоянным контролем пожарных извещателей 24 и периодически контролируется устройствами обнаружения загорания и теленаблюдения 14, установленными на ПРС 4, перемещаемых по заданной программе. Одновременно все элементы многофункционального робототехнического комплекса тестируются по программе поиска неисправностей системой удаленного доступа диагностики неисправностей 22. Данные токовых нагрузок, контрольных положений, давления воды и др. при отклонении параметров от установленных значений регистрируются и направляются по защищенным каналам связи на пульт оператору АРМ.
При возникновении очага загорания срабатывают пожарные извещатели 24, и приемно-контрольное устройство 23 подает сигнал «Тревога» на устройство управления МРТК 13, которое включает МРТК в режим поиска очага возгорания с применением ПРС 4 и направляет управляющие сигналы по каналу связи 9 на блоки коммутации 8 ПРС 4 для поиска очага возгорания. Для повышения быстродействия поиска включается система блиц-мониторинга 18. Весь защищаемый объект распределяется на зоны поиска для каждого ПРС 4. При таком распределении производится одновременный мониторинг по фиксированным зонам для всего защищаемого объекта. При перемещении устройства обнаружения загорания и теленаблюдения 14 идентифицируют очаги возгорания, и при их наличии направляют информацию по каналу связи 15 в устройство 16 цифровой обработки информации и определения угловых координат, которые затем отправляются в устройство управления МРТК 13. По результатам поступившей информации, устройство управления МРТК 13 формирует управляющие сигналы по каналу связи 9 о координатах загорания на соответствующие блоки коммутации 8 и подает команду «запуск» в систему процессного управления пожаротушением 20, а также подает технологические команды в блок управления 25 на запуск станции компрессионной пены 26, открытие управляемого дискового затвора 6 по пене с приводом, на отключение вентиляции и др. Компрессионная пена по пенному трубопроводу 3 поступает в ПРС 4 на тушение.
Информация о возгорании на объекте передается дежурному оператору на АРМ. На экране видеоконтрольного устройства 15 видеоинформация по двухканальной телевизионной связи 43 от устройства обнаружения загорания и теленаблюдения 13 после цифровой обработки очага загорания в устройстве цифровой обработки сигнала 14 появляется в виде изображения очага загорания, выделенного в рамке. Дежурный оператор АРМ, получая оперативную видеоинформацию, может взять управление на себя, перейдя в дистанционный режим.
Для проведения объективной разведки в особо опасных аварийных местах, в том числе для поиска людей (пострадавших) в зоне воздействия опасных факторов пожара, при угрозе взрыва и обрушения конструкций, а также в условиях тушения пожаров, сопровождаемых радиационными или химическими авариями, возможно эффективно применять МРУП 27 c автономной системой радиоуправления. По команде оператора, МРУП 22, используя систему маршрутной навигации, перемещается к ближайшему водозаборному устройству в виде водозапорного клапана 25 на пенном трубопроводе 20, расположенном в зоне загорания, паркуется к нему и телескопическим манипулятором 28 стыкует с ним пожарный рукав 29 с соединительной головкой. После подключения к трубопроводу МРУП 27 направляется непосредственно в зону пожара, где производит мониторинг с определением координат и площади возгорания и производит тушение строчным сканированием струи по площади очага или защиту (охлаждение) технологического оборудования и несущих конструкций в локальных зонах. При необходимости, МРУП 27 осуществляет разведку в условиях возникновения и развития радиационных и химических аварий на объектах защиты. При этом вся работа МРУП 27 может корректироваться оператором в дистанционном режиме.
При авариях вследствие пожаров и взрывов, приводящих к разрушению конструкций и развитию аварии наружу, за предел защищаемых помещений, для оперативного реагирования применяется мобильный роботизированный комплекс (далее МРК), находящийся в составе МРТК. Управление МРК осуществляется с центрального пульта управления 31 (далее ЦПУ). Развертывание мобильных устройств производится входящим в состав МРК МРУП 27, при этом осуществляется доставка к месту аварии дополнительных мобильных устройств в составе возимых РУП 32, связанных по радиоканалу с ЦПУ 31: возимых пожарных мониторов 33 и возимых пожарных мониторов с осцилляторами 34. С ЦПУ 31 подаются управляющие команды на устройство управления МРТК 13 для координации работ с насосной станцией 26 по перераспределению огнетушащих веществ, на управление МРУП 27 по развертыванию и установке в заданную позицию возимых пожарных мониторов 33 и возимых пожарных мониторов с осцилляторами 34 для подачи ОТВ, по дистанционному управлению пожаротушением от МРУП 27 и возимых РУП 32. Пожарные рукава 35 с легкой компрессионной пеной позволяют свободно осуществлять маневрирование для развертывания мобильных устройств.
Для радиационной и химической разведки и тушения пожаров применяется дистанционно-управляемый пожарный автомобиль аварийно-спасательных работ АСР 37, находящийся в составе МРК, управление перемещением которого вместе с пожарным рукавом 31 осуществляется оператором по радиоканалу от ЦПУ 31. По прибытии к месту аварии управление тушением лафетным стволом 38 осуществляется по радиоканалу с ЦПУ 31 через блок дистанционного управления. Информация от прибора радиометрического контроля 40 об интенсивности ионизирующего излучения радиоактивных веществ и данные о химически активных веществах (не показано) поступают по радиоканалу на ЦПУ 31 оператору.
При распространении пожара на наружные поверхности сооружений промышленного объекта по команде оператора поднимаются квадрокоптеры 44, которые управляются с отдельного пульта радиоуправления (не показано) и выводятся над аварийной зоной. Наблюдение осуществляется непосредственно оператором квадрокоптера 44 и дежурным оператором на дисплее ЦПУ 31 по информации от двухканальной ИК- и видеокамеры 45, передаваемой через приемо-передатчик 49 по радиоканалу к ЦПУ 31. Стабильность полета и управляемость квадрокоптера 44 реализуется полетным контроллером 48 с навигационной программой. Удержание направления съемки камеры при маневрах квадрокоптера 44 осуществляется гиростабилизированным подвесом 46 при участии блока определения координат загорания 47. Двигатели подвеса 46 отрабатывают крен камеры 45 в направлении обнаруженного очага по заданным координатам и удерживают заданное направление съемки камеры 45 гиростабилизированным подвесом 46. Оператором квадрокоптера 44 выбираются рабочие точки, фиксируемые в программе навигации, с которых осуществляется мониторинг объекта. При проведении мониторинга по программе навигации осуществляется облет этих точек с удержанием на месте (зависанием) квадрокоптера 44 в заданных координатах рабочих точек на время мониторинга. По информации от двухканальной ИК- и видеокамеры 45, поступающей на блок определения координат загорания 47, идентифицируются очаги возгорания, определяются их координаты и площадь, которые затем, как и координаты местонахождения квадрокоптера 44, в пространстве от полетного контроллера 48 через приемо-передатчик 49 по радиоканалу передаются в ЦПУ 31, которое по этим данным регистрирует координаты возгораний на конфигурации объекта. Дежурный оператор после оценки обстановки по полученным данным на экране дисплея ЦПУ 31, при наличии очагов возгорания, направляет аварийно-спасательную группу к местонахождению обнаруженных очагов для их ликвидации с использованием возимых технических средств пожаротушения 32, 33, 34. В труднодоступные места, где очагов с места наблюдения не видно, но которые просматриваются с квадрокоптера 44, направляется мобильная роботизированная установка пожаротушения 27, которая, по заданным координатам очагов возгорания, производит их тушение навесными струями ОТВ.
Предложенный многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе РУП и МРК с применением технологии тушения компрессионной пеной, ее адресной доставкой по воздуху на очаг возгорания в любую точку защищаемого пространства в радиусе действия струи, с расширенными функциональными возможностями, основанными на цифровых программируемых системах, дополненный системами мониторинга и пожаротушения, радиационного и химического контроля, интегрированными в общую систему управления защитой объекта, является высокоэффективным автоматическим и дистанционно управляемым средством борьбы с пожарами и авариями, позволяющим при обнаружении пожаров в ранней стадии направить в очаг мощный поток компрессионной пены, а при развитии пожара и обрушении несущих конструкций производственных объектов проводить необходимые аварийно-спасательные работы.
В отличие от известных, в предложенном многофункциональном робототехническом комплексе при авариях, приводящих к разрушениям несущих конструкций с появлением техногенных зон снаружи защищаемых помещений, для тушения пожаров разных классов горючих веществ и материалов («А»; «В»; «С»; «Е»; «F») и проведения аварийно-спасательных работ, широко используются мобильные устройства, интегрированные в мобильный роботизированный комплекс, который включает в себя:
- МРУП с расширенными функциональными возможностями по доставке мобильных устройств и прокладке рукавных линий к месту аварии;
- возимую РУП;
- возимый пожарный монитор;
- возимый пожарный монитор с осциллятором;
- дистанционно-управляемый пожарный автомобиль радиационной и химической разведки и тушения пожаров;
- пожарный квадрокоптер.
Также к техническому результату заявляемого изобретения можно отнести применение в мобильных устройствах пожаротушения компрессионной пены, которая, наряду с высокой эффективностью пожаротушения, значительно облегчает развертывание рукавных линий и передислокацию и маневрирование мобильных устройств с пенозаполненными пожарными рукавами, которые в 7 раз легче рукавов с раствором пенообразователя.
Эти отличительные особенности комплекса позволяют существенно повысить пожарную безопасность защищаемого объекта, обеспечить мониторинг обстановки и немедленное обнаружение возгорания, а, самое главное, высвободить персонал охраняемого объекта и личный состав пожарно-спасательных подразделений от необходимости нахождения и работы по тушению в зонах воздействия опасных факторов пожара, таких как пламя, тепловой поток, дым, химически опасные вещества, возможное поражение электротоком, воздействие ионизирующего излучения, и, как следствие, устранить или минимизировать риски для их жизни и здоровья.
В то же время, многофункциональный робототехнический комплекс способен значительно повысить эффективность тушения одного или несколько очагов пожаров, уменьшить расход и, соответственно, количество используемых ОТВ, а при развитии пожара и обрушении несущих конструкций перекрытий предотвратить дальнейшее развитие аварийной ситуации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ тушения пожаров многофункциональным робототехническим комплексом при авариях в тоннелях | 2024 |
|
RU2834501C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| МАЛОГАБАРИТНАЯ МОБИЛЬНАЯ РОБОТИЗИРОВАННАЯ УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2018 |
|
RU2685319C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| СПОСОБ ТУШЕНИЯ ЛЕСНЫХ ПОЖАРОВ И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2677413C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| Роботизированная установка пожаротушения контейнерная для автоматизированных складов | 2020 |
|
RU2739816C1 |
| РОБОТИЗИРОВАННЫЙ, МОБИЛЬНЫЙ, МОДУЛЬНЫЙ ГОРНОСПАСАТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2682298C1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| СПОСОБ ДОСТАВКИ РОБОТЕХНИЧЕСКОГО КОМПЛЕКСА ПОВЫШЕННОЙ ПРОХОДИМОСТИ К МЕСТУ ПОЖАРА И ПРОВЕДЕНИЮ СПАСАТЕЛЬНЫХ РАБОТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2553016C1 |
Изобретение относится к роботизированным установкам пожаротушения (далее – РУП), дополненным мобильными устройствами пожаротушения, объединенными общей системой контроля, управления и обнаружения пожара, и может быть использовано дополнительно для предупреждения пожаро- и взрывоопасных ситуаций, а также ограничения воздействия опасных факторов пожара на людей, оборудование и конструкции производственных зданий, помещений и установок, в том числе машинных залов АЭС. Целью изобретения является создание многофункционального робототехнического комплекса противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса. Для этого в устройстве, включающем в себя роботизированную установку пожаротушения, дополнительно вводятся: мобильный роботизированный комплекс с центральным пультом управления, соединенным с устройством управления многофункциональным робототехническим комплексом, при этом мобильная роботизированная установка пожаротушения включена в состав мобильного роботизированного комплекса и соединена с устройством управления многофункциональным робототехническим комплексом по радиоканалу, также в состав мобильного роботизированного комплекса включена возимая роботизированная установка пожаротушения, связанная по радиоканалу с центральным пультом управления, возимый пожарный монитор и возимый пожарный монитор с осциллятором, соединенные пожарными рукавами с компрессионной пеной через запорные устройства с пенным трубопроводом; дистанционно-управляемый пожарный автомобиль аварийно-спасательных работ для радиационной и химической разведки и тушения пожаров, включающий в себя лафетный ствол с блоком дистанционного управления, прибор радиометрического контроля по определению интенсивности ионизирующего излучения радиоактивных веществ, связанные по радиоканалу с центральным пультом управления, и пожарный рукав, подключенный соединительной головкой к лафетному стволу и через водозапорный клапан к пенному трубопроводу; пожарный квадрокоптер для мониторинга наружных потенциально опасных зон, включающий в себя двухканальную камеру в ИК- и видеодиапазоне, соединенную с гиростабилизированным подвесом и с блоком определения координат загорания, которые соединены с полетным контроллером с навигационной программой, соединенным с приемопередатчиком, который также соединен с блоком определения координат загорания и по радиоканалу с пультом радиоуправления и с центральным пультом управления. Предложенные технические решения позволяют значительно расширить возможности применения устройства, в том числе по оперативному реагированию на развитие пожаров, взрывов и аварий наружу - за пределы защищаемых помещений, по мониторингу наружных потенциально опасных зон возникновения возгорания с видеоконтролем аварийной обстановки, снижению развития аварийных ситуаций и предотвращению расширения техногенных зон с радиоактивными и химическими заражениями. 2 з.п. ф-лы, 1 ил.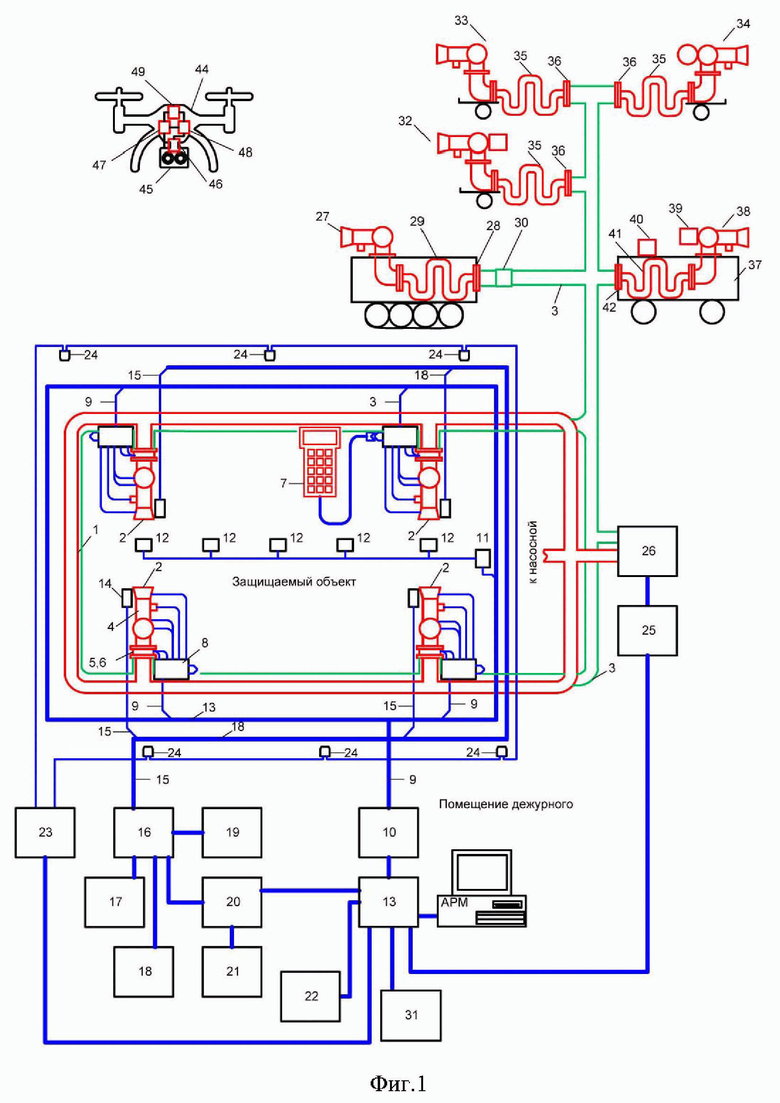
1. Многофункциональный робототехнический комплекс противопожарной защиты производственных объектов на базе роботизированной установки пожаротушения и мобильного роботизированного комплекса, содержащий пожарный водопровод, подключенный к насосной станции, входящие в состав роботизированной установки пожаротушения соединенные с пенным трубопроводом по крайней мере два роботизированных пожарных ствола с установленными на входе перед каждым пожарным роботизированным стволом управляемыми дисковыми затворами с приводами: один для подачи воды, другой для подачи компрессионной пены, и переносной пульт управления, соединенные с блоком коммутации на входе, а на его выходе по каналу связи с сетевым контроллером, который на входе также соединен с системой контроля концентрации газов с подключенными к нему газоанализаторами, а на выходе с устройством управления многофункционального робототехнического комплекса, установленные на каждом роботизированном пожарном стволе устройства обнаружения загорания и теленаблюдения, соединенные двухканальной телевизионной связью с устройством цифровой обработки сигнала, которое соединено на входе с системой предупредительного мониторинга и системой блиц-мониторинга, а на выходе с видеоконтрольным устройством и системой процессного управления пожаротушением, соединенной на выходе с устройством управления многофункциональным робототехническим комплексом, которое соединено с системой удаленного доступа, через приемно-контрольное устройство с пожарными извещателями и через блок управления со станцией компрессионной пены, пенный трубопровод от которой подключен пожарным рукавом к мобильной роботизированной установке пожаротушения,
отличающийся тем, что многофункциональный робототехнический комплекс включает мобильный роботизированный комплекс с центральным пультом управления, соединенным с устройством управления многофункциональным робототехническим комплексом, при этом мобильная роботизированная установка пожаротушения включена в состав мобильного роботизированного комплекса и соединена с устройством управления многофункциональным робототехническим комплексом по радиоканалу, также в состав мобильного роботизированного комплекса включена возимая роботизированная установка пожаротушения, связанная по радиоканалу с центральным пультом управления, возимый пожарный монитор и возимый пожарный монитор с осциллятором, соединенные пожарными рукавами с компрессионной пеной через запорные устройства с пенным трубопроводом.
2. Многофункциональный робототехнический комплекс по п. 1, отличающийся тем, что в состав мобильного роботизированного комплекса дополнительно введен дистанционно-управляемый пожарный автомобиль аварийно-спасательных работ для радиационной и химической разведки и тушения пожаров, включающий в себя лафетный ствол с блоком дистанционного управления, прибор радиометрического контроля по определению интенсивности ионизирующего излучения радиоактивных веществ, связанные по радиоканалу с центральным пультом управления, и пожарный рукав, подключенный соединительной головкой к лафетному стволу и через водозапорный клапан к пенному трубопроводу.
3. Многофункциональный комплекс по пп. 1 или 1 и 2, отличающийся тем, что в состав мобильного роботизированного комплекса дополнительно введен пожарный квадрокоптер для мониторинга наружных потенциально опасных зон, включающий в себя двухканальную камеру в ИК- и видеодиапазоне, соединенную с гиростабилизированным подвесом и с блоком определения координат загорания, которые соединены с полетным контроллером с навигационной программой, соединенным с приемопередатчиком, который также соединен с блоком определения координат загорания и по радиоканалу с пультом радиоуправления и с центральным пультом управления.
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С АЗОТНО-ВОДЯНЫМ ПОЖАРОТУШЕНИЕМ | 2010 |
|
RU2426603C1 |
| WO 2023022618 A1, 23.02.2023 | |||
| US 6975225 B2, 13.12.2005 | |||
| US 9937369 B2, 10.04.2018. | |||

