ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе улучшения устойчивости и управляемости (СУУ) воздушного судна, например самолета или вертолета.
УРОВЕНЬ ТЕХНИКИ
СУУ используется для наложения команды, генерируемой бортовым вычислителем (т.е. автопилотом) на вводимые вручную команды (например, управляющее воздействие летчика). СУУ содержит исполнительный механизм, производящий выходное усилие для управления плоскостью управления полетом, например рулем направления.
Как правило, исполнительные механизмы СУУ содержат блок, включающий в себя электромагнитный клапан, электрогидравлический сервоклапан, датчик относительного положения (например, дифференциальный трансформатор для измерения линейных перемещений (LVDT-датчик)) и выходной поршень.
Однако известная в уровне техники система может быть сложной, дорогостоящей и подверженной протечкам из-за наличия гидравлики в сервоклапане.
Целью данного изобретения является устранение по меньшей мере некоторых из этих недостатков.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем документе раскрыта СУУ для воздушного судна, которая содержит первый входной вал, передающий первый входной крутящий момент, второй входной вал, передающий второй входной крутящий момент и устройство суммирования первого и второго крутящих моментов для создания выходного крутящего момента для управления исполнительным механизмом.
СУУ может управлять исполнительным механизмом, который управляет любой частью воздушного судна, например, плоскостью управления полетом.
Устройство суммирования может являться любым устройством, способным комбинировать вращение первого и второго входного вала и создавать комбинированный крутящий момент на выходе.
В одном варианте реализации устройство суммирования суммирует два входных крутящих момента алгебраическим способом; таким образом, первый отрицательный командный сигнал и второй положительный командный сигнал взаимно уничтожаются, по меньшей мере частично.
Первый и второй входные крутящие моменты могут создаваться первым и вторым входным валом соответственно при помощи любого подходящего устройства ввода командных сигналов. В одном варианте реализации СУУ может дополнительно содержать устройство ввода командных сигналов от летчика, выполненное с возможностью создания и/или управления вращением первого входного вала и бортовой вычислитель, выполненный с возможностью создания и/или управления вращением второго входного вала.
Термин «устройство ввода командных сигналов от летчика» означает любое устройство, которое может использоваться летчиком для непосредственного или опосредованного вращения первого входного вала. Устройство ввода командных сигналов от летчика может являться механическим устройством, соединенным с первым входным валом при помощи чисто механической связи. Как вариант устройство ввода командных сигналов от летчика может содержать устройство, вырабатывающее электронный или электрический сигнал, который управляет электромеханическим приводом, вращающим первый входной вал.
Термин «бортовой вычислитель» означает любой вычислитель, который управляет какой-либо частью воздушного судна, например, автопилот. Бортовой вычислитель может выполнять мониторинг условий полета и посылать сигналы одному или нескольким механизмам плоскостей управления, например, руля направления.
В одном варианте реализации СУУ может дополнительно содержать электрический двигатель, выполненный с возможностью вращения второго входного вала. Таким образом, возможно выполнение электродвигателя с возможностью управления вращением второго входного вала в ответ на командный сигнал от бортового вычислителя.
Возможно выполнение электродвигателя с возможностью управления угловым поворотом второго входного вала с определенным шагом; таким образом, бортовой вычислитель может давать команду электродвигателю на вращение второго входного вала на определенный угол. К примеру, может использоваться шаговый электродвигатель.
Как вариант или в качестве дополнения, возможно наличие датчика относительного положения для того, чтобы угол поворота второго входного вала мог быть определен в любой момент времени и, например, передан обратно на бортовой вычислитель. В качестве примера, возможно использование дифференциального трансформатора для измерения угловых перемещений (LVDT-датчика) в сочетании с мотором коррекции.
В одном варианте реализации устройство содержит планетарную передачу в сборе, содержащую кольцевую шестерню, солнечную шестерню и некоторое количество планетарных шестерен. Каждая планетарная шестерня (также известная в технике как «сателлит») подвижно соединена как с кольцевой, так и с солнечной шестерней. Солнечная шестерня расположена в пределах и на общей оси с кольцевой шестерней. Кольцевая шестерня и солнечная шестерня могут вращаться относительно друг друга.
Термин «подвижно соединен» означает то, что планетарные шестерни могут непосредственно приводить в движение кольцевую шестерню и солнечную шестерню, либо возможно наличие одного или нескольких промежуточных элементов, которые передают движение между планетарной шестерней и кольцевой или солнечной шестерней, или наоборот.
Возможно любое подходящее количество планетарных шестерен. Например, возможно использование двух, трех или четырех планетарных шестерен.
Планетарные шестерни могут быть зафиксированы друг с другом, чтобы они могли вращаться вокруг кольцевой и солнечной шестерни и вращаться вокруг собственных осей за счет, например, использования водила, соединенного с каждой планетарной шестерней. Как вариант, планетарные шестерни могут не фиксироваться друг с другом, а лишь находиться в необходимом положении за счет зацепления с кольцевой и солнечной шестернями.
Планетарные шестерни могут входить в зацепление с внутренней поверхностью кольцевой шестерни. В частности, планетарные шестерни могут входить в зацепление с рядом зубьев, образованных на внутренней периферийной поверхности кольцевой шестерни.
Второй входной вал может быть подвижно соединен с кольцевой шестерней, в частности, с внешней поверхностью кольцевой шестерни. Второй входной вал может входить в зацепление с рядом зубьев, образованных на внешней периферийной поверхности кольцевой шестерни.
Солнечная шестерня может быть подвижно соединена с первым входным валом. Например, солнечная шестерня может быть сформирована на (т.е. являться единым целым) первом входном валу либо может быть сформирована отдельно и соединена с первым входным валом таким образом, чтобы она могла приводиться во вращение при помощи его.
Планетарные шестерни могут создавать выходной крутящий момент для управления механизмом. Другими словами, вращение планетарных шестерен может использоваться в качестве средства управления механизмом. К примеру, как с механизмом, так и с планетарными шестернями может подвижно соединяться круглая шестерня (имеющая зубья по своей окружности). Круглая шестерня может располагаться между планетарными шестернями. Круглая шестерня может вращаться вокруг той же оси, что и кольцевая шестерня, и солнечная шестерня.
Приведение в движение солнечной шестерни в первом направлении вращения может вызвать движение планетарных шестерен по внутренней поверхности кольцевой шестерни (т.е. вокруг центральной оси планетарной передачи в сборе), в том же (первом) направлении вращения, вращаясь вокруг собственных осей во время движения вокруг кольцевой шестерни.
Приведение в движение кольцевой шестерни в обратном втором направлении вращения может также вызвать движение планетарных шестерен вокруг внешней поверхности солнечной шестерни (снова вокруг центральной оси планетарной передачи в сборе), в первом направлении вращения, вращаясь вокруг собственных осей во время движения.
Вращение планетарных шестерен вокруг собственных осей и центральной оси планетарной передачи в сборе суммируется для создания выходного крутящего момента шестерни, расположенной с планетарными шестернями. Как таковое, приведение в движение планетарных шестерен и кольцевой шестерни в противоположных направлениях вызывает сложение величины вращения этих шестерен, чтобы планетарные шестерни вращались далее. Приведение в движение планетарной шестерни и кольцевой шестерни в том же направлении означает, что меньшая величина вращения этих шестерен вычитается из другой, и величина вращения планетарных шестерен уменьшается. По сути, осуществляя мониторинг величины командного сигнала летчика, СУУ может вырабатывать соответствующий командный сигнал коррекции (посредством второго входного вала) для передачи любой желаемой величины вращения на механизм.
СУУ может дополнительно содержать корпус, закрывающий по меньшей мере часть планетарной передачи в сборе, и центрирующий механизм для смещения планетарной передачи в сборе в заданное положение по отношению к корпусу. Корпус может удерживать планетарную шестерню и кольцевую шестерню на одной оси.
Возможно выполнение центрирующего механизма с возможностью возврата кольцевой шестерни в заданное положение в случае отказа электродвигателя и свободного вращения второго входного вала.
Центрирующий механизм может содержать элемент, достигающий вогнутой части (т.е. выемки) в кольцевой шестерне и/или в корпусе.
Центрирующий механизм может содержать упругий элемент, расположенный между кольцевой шестерней и корпусом.
Упругий элемент может быть прикреплен к кольцевой шестерне и/или корпусу.
В заданном положении кольцевой шестерни упругий элемент может находиться в ненагруженном или в нерастянутом положении. Вращение кольцевой шестерни вне заданного положения (относительно корпуса) приводит упругий элемент в напряжение и/или в нагруженное состояние. По сути, упругий элемент может противодействовать вращению кольцевой шестерни вне заданного положения (относительно корпуса).
Упругий элемент может содержать пружину растяжения.
Движение кольцевой шестерни в направлении от заданного положения вызывает растяжение пружины от ее нормальной длины (при нахождении кольцевой шестерни в заданном положении).
СУУ может дополнительно содержать исполнительный механизм, который подвижно соединен с вращающимся выходом устройства суммирования. Исполнительный механизм может использоваться для управления одной или несколькими плоскостями управления полетом. Исполнительный механизм может содержать вращающийся вход, подвижно соединенный с вращающимся выходом устройства суммирования, например, с планетарными шестернями. Вращающийся вход исполнительного механизма, например, шестерня, может быть выполнен с возможностью вращения вокруг той же оси, что и первый входной вал, и может располагаться между планетарными шестернями.
Также раскрыт способ управления исполнительным механизмом, включающий использование СУУ, описанной выше.
В настоящей заявке также раскрыт способ эксплуатации СУУ на воздушном судне, включающий ввод командного сигнала летчиком посредством вращения первого вала, ввод командного сигнала коррекции в виде вращения второго вала, суммирование частоты вращения командного сигнала летчика и командного сигнала коррекции для вывода выходного командного сигнала и использование выходного командного сигнала для управления исполнительным механизмом.
Шаг ввода командного сигнала летчиком может включать использование устройства ввода командных сигналов летчика для вращения первого вала.
Шаг ввода командного сигнала коррекции может включать отправку команды вычислителем системы управления полетом (например, автопилотом), что вызывает вращение второго вала, например, электродвигателю.
Шаг суммирования частоты вращения командного сигнала летчика и командного сигнала коррекции может включать использование планетарной передачи в сборе.
Шаг использования выходного командного сигнала для управления механизмом может включать вращение входного вала исполнительного механизма.
Способ эксплуатации СУУ может включать шаг использования СУУ, как описано выше, причем вращение первого вала включает первый входной вал, вращение второго вала включает второй входной вал, а шаг суммирования величины вращения командных сигналов летчика и коррекции включает использование устройства суммирования.
Выходной командный сигнал может быть в виде одного или нескольких вращающихся выходных валов, которые приводят в движение входной вал исполнительного механизма. Входной вал механизма может содержать шестерню (или может быть подвижно соединен с ней), которая находится в прямом или непрямом зацеплении с выходными валами, например, планетарные шестерни.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Некоторые примеры вариантов реализации данного изобретения будут описаны со ссылкой на фигуры 1-4, на которых:
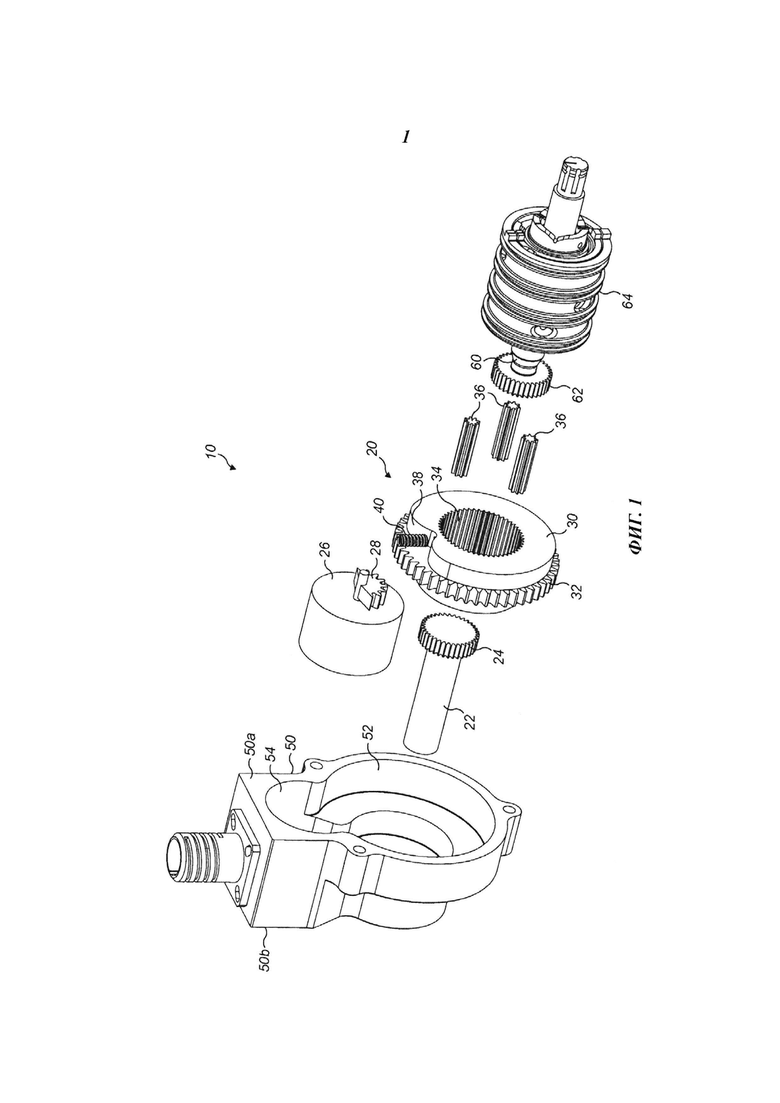
фиг. 1 представляет собой объемную проекцию СУУ в разобранном виде согласно варианту реализации данного изобретения;
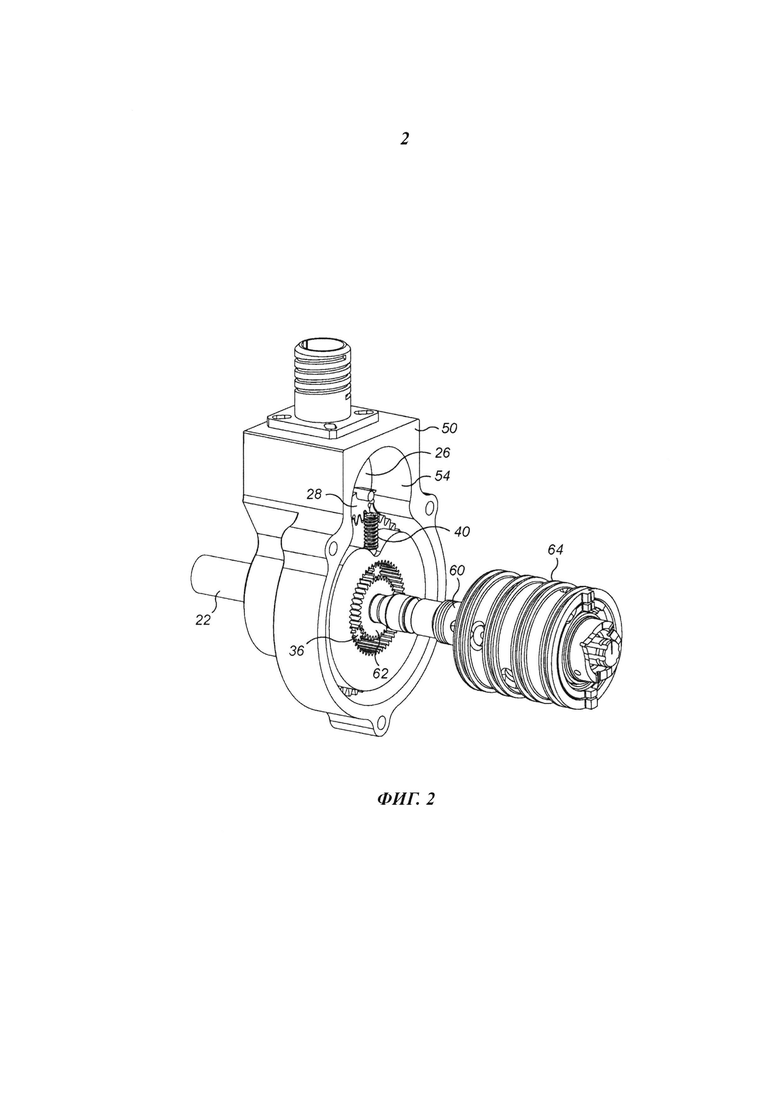
фиг. 2 представляет собой объемную проекцию СУУ на фиг. 1 в собранном виде;
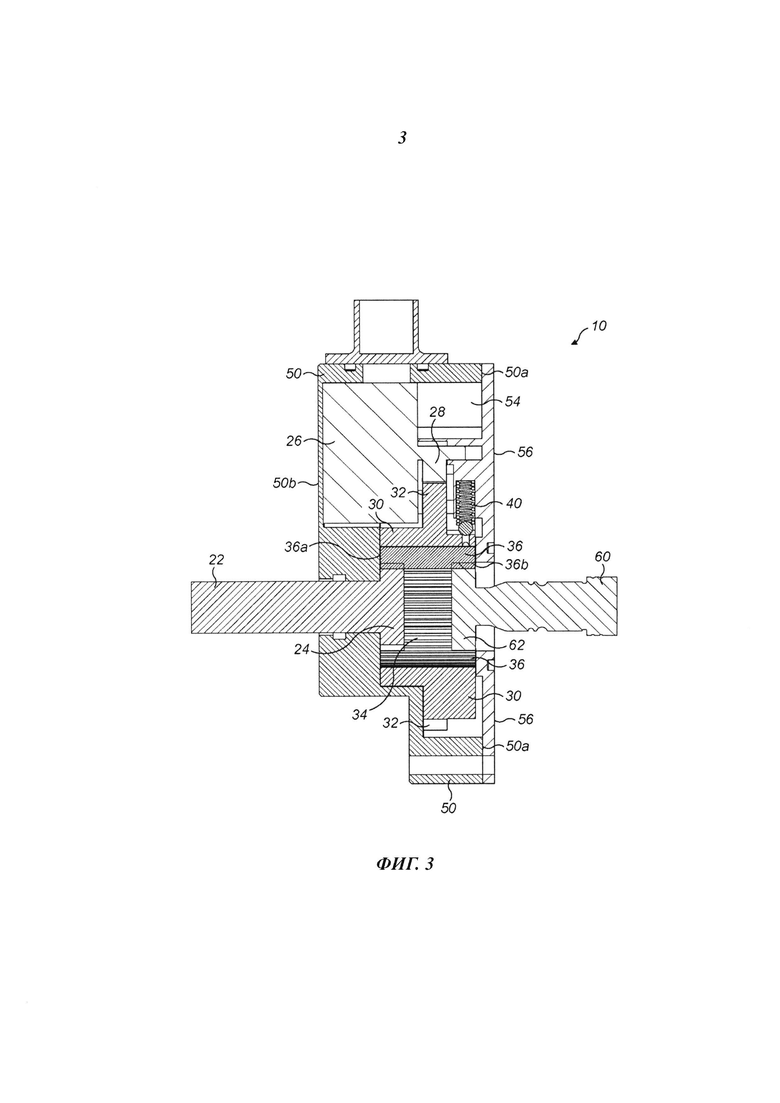
фиг. 3 представляет собой разрез СУУ на фиг. 2 в собранном виде, сделанный в продольном направлении;
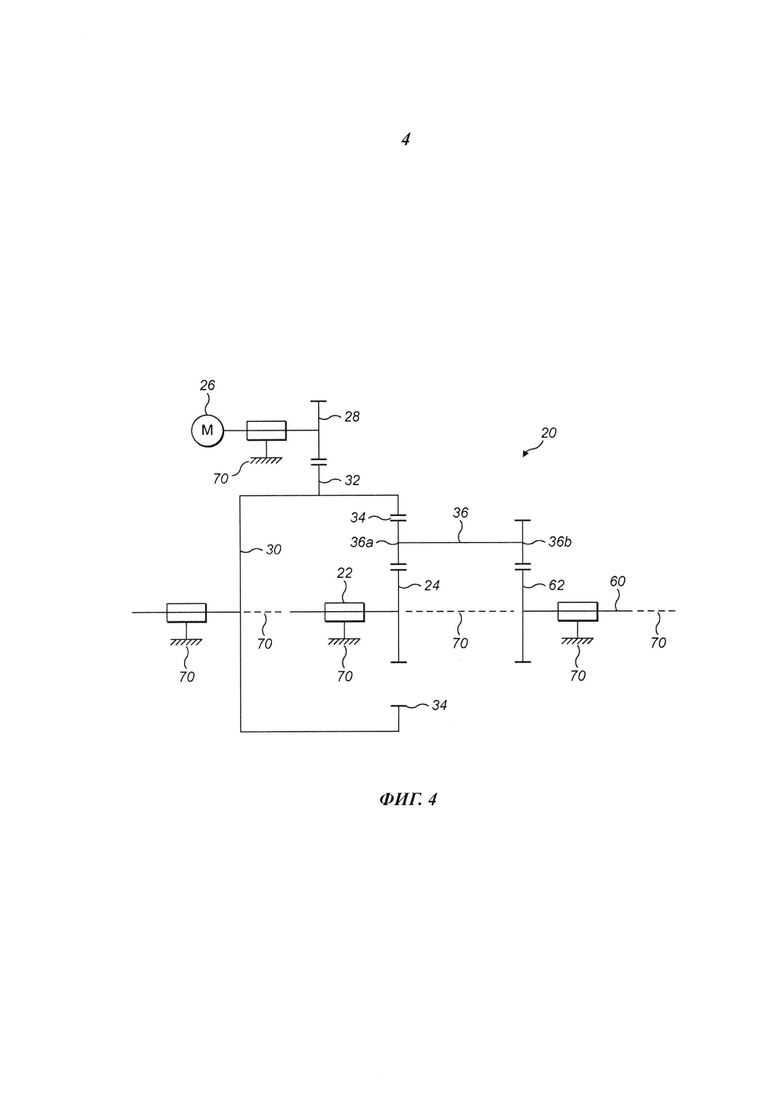
фиг. 4 представляет собой принципиальную схему СУУ на фиг. 1-3.
ПОДРОБНОЕ РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
На фиг. 1-3 показаны составные части СУУ 10. Тем не менее, следует понимать, что СУУ также содержит другие части, которые не показаны на этих фигурах, например, один или несколько исполнительных механизмов, бортовой вычислитель, электрические и механические соединения и устройство ввода командных сигналов летчика.
СУУ 10 содержит планетарную передачу в сборе 20, которая содержит первый входной вал 22, второй входной вал 28, кольцевую шестерню 30 и три планетарные шестерни 36. Также имеется шестерня 62 для управления исполнительным механизмом (не показана).
Первый входной вал 22 подвижно соединен с устройством ввода командных сигналов летчика (не показано), расположенным в кабине экипажа воздушного судна. Таким образом, первый входной вал 22 может считаться командным валом летчика. Первый входной вал 22 содержит солнечную шестерню 24. Солнечная шестерня 24 может быть образована как одно целое с первым входным валом 22 либо может быть зафиксирована на нем любым подходящим способом.
Второй входной вал 28 соединен с электродвигателем 26. Электродвигатель 26 может являться, к примеру, шаговым электродвигателем, чтобы было возможно пошаговое управление углом поворота вала 28, либо мотором коррекции, используемым с RVDT-датчиком, чтобы был возможен точный мониторинг угла поворота второго входного вала 28 (вычислителем системы управления полетом).
Электродвигатель 26 подвижно соединен с вычислителем системы управления полетом, например, с автопилотом (не показан). Таким образом, второй входной вал 28 может считаться командным сигналом бортового вычислителя, командным сигналом автопилота или командным сигналом коррекции.
Кольцевая шестерня 30 содержит внешние зубья 32, расположенные на ее внешней окружности, и внутренние зубья 34, расположенные на ее внутренней окружности. Внешние зубья 32 выполнены с возможностью зацепления с зубьями второго входного вала 28. Внутренние зубья 34 выполнены с возможностью зацепления с зубьями трех планетарных шестерен 36, расположенных между кольцевой шестерней 30 и солнечной шестерней 24. Таким образом, зубья солнечной шестерни 24 выполнены с возможностью зацепления с зубьями планетарных шестерен 36.
Зубья планетарных шестерен 36 также выполнены с возможностью зацепления с зубьями шестерни 62. Шестерня 62 соединена с входным валом 62 (или образована на нем) клапана управления 64. Клапан управления 64 вращается вместе с шестерней 62 и входным валом 62 для управления гидравлическим потоком в камерах исполнительного механизма (не показаны), который, в свою очередь, управляет работой исполнительного механизма (не показан).
Как видно на фиг. 3, каждая планетарная шестерня 36 имеет первую концевую часть 36а и вторую концевую часть 36b. Первая концевая часть 36а входит в зацепление с солнечной шестерней 24, в то время как вторая концевая часть 36b входит в зацепление с шестерней 62. Имеется зазор вдоль длины планетарной шестерни 36 между концом солнечной шестерни 24 и противоположным концом шестерни 62.
Предложен корпус 50, в котором расположена планетарная передача 20. Корпус 50 содержит первую лицевую сторону 50а и вторую лицевую сторону 50b. Вторая лицевая сторона 50b является плоской и содержит отверстие, через которое проходит первый входной вал 22. Первая лицевая сторона 50а содержит первое отверстие 52, которое вмещает кольцевую шестерню 20, и второе, меньшее отверстие 54 (соединенное с первым отверстием 52), которое вмещает электрический двигатель 26. Как видно на фиг. 3, после установки планетарной передачи в сборе 20 на место к первой лицевой стороне 50а может фиксироваться крышка 56. Крышка 56 содержит отверстие, через которое проходит входной вал клапана управления 62.
На кольцевой шестерне 30 зафиксирован центрирующий механизм в виде пружины растяжения 40. Пружина растяжения 40 располагается в вогнутой части 38, т.е. в выемке на кольцевой шестерне 30, и доходит до второго отверстия 54 на первой лицевой поверхности 50а корпуса. Пружина растяжения 40 может быть зафиксирована на части второго входного вала 28.
Фиг. 4 представляет собой принципиальную схему планетарной передачи в сборе 20. Показаны электродвигатель 26, кольцевая шестерня 30, первый входной вал 22 и входной вал клапана управления 60, и все они соединены с заземлением 70 таким образом, чтобы они могли вращаться по отношению к нему. Показана одна планетарная шестерня 36, находящаяся в зацеплении с внутренними зубьями 34 кольцевой шестерни 30 и шестерни 24 первого входного вала 22. Как видно, первый входной вал 22 и входной вал клапана управления 60 расположены вдоль центральной осевой линии планетарной передачи в сборе 70, вокруг которой вращаются эти валы 22, 60, а также кольцевая шестерня 30 и планетарные шестерни 36.
На практике летчик будет использовать устройство ввода командных сигналов (не показано), которое будет вызывать вращение первого входного вала 22 и солнечной шестерни 24.
Это вращение будет передаваться трем планетарным шестерням 36, которые находятся в зацеплении с солнечной шестерней 24. В связи с массой кольцевой шестерни 30 и кинематикой системы три планетарные шестерни 36 будут вращаться с солнечной шестерней 24 по внутренней окружности кольцевой шестерни 30, так как они находятся в зацеплении с внутренними зубьями 34. При вращении кольцевой шестерни 30 планетарные шестерни 36 будут вращаться вокруг собственных осей вращения. Движение планетарных шестерен 36 вокруг кольцевой шестерни 30 и вокруг собственных осей вращения вызывает вращение входной шестерни 62 клапана управления 64. Это, в свою очередь, вызовет работу исполнительного механизма (не показан) для изменения положения плоскости управления полетом, например, руля направления. Таким образом, использование устройства ввода командных сигналов летчика управляет исполнительным механизмом.
Если вычислитель системы управления полетом определяет, что команда устройства ввода командных сигналов летчика нуждается в коррекции, например, за счет большего изменения положения плоскости управления механизмом, вычислитель посылает команду электродвигателю 26 на вращение второго входного вала 28 в одном или другом направлении на определенный угол.
Вращение второго входного вала 28 вызывает вращение кольцевой шестерни 30, что, в свою очередь, вызывает вращение трех планетарных шестерен 36 вместе с кольцевой шестерней 30 вокруг солнечной шестерни 24. Каждая планетарная шестерня 36 будет также вращаться вокруг собственной оси при движении вокруг солнечной шестерни 24. Это вызовет вращение входной шестерни 62.
При вращении обоих валов, первого входного вала 22 и второго входного вала 28, их величина вращения будет суммироваться алгебраическим способом, т.е. если обе величины вращения являются «положительными», то они будут суммироваться, но если одна из величин вращения будет «отрицательной», то она будет вычитаться из другой «положительной» величины вращения.
Тем не менее, следует понимать, что для увеличения величины вращения входной шестерни 62 (той величины, с которой ее вращает первый входной вал 22), электродвигатель 26 должен вращать второй входной вал 28 в противоположном направлении к первому входному валу 22. Причина этого заключается в том, что вращение первого входного вала 22 и второго входного вала 28 в противоположных направлениях вызывает вращение трех планетарных шестерен 36 в том же направлении. По сути, если вычислитель системы управления полетом определяет, что устройством ввода командных сигналов летчика была передана слишком высокая величина вращения на входную шестерню 62 (а значит, и на исполнительный механизм), то эта величина вращения может быть уменьшена за счет вращения второго входного вала 28 в том же направлении, что и направление вращения первого входного вала 22. Варьирование величины вращения первого входного вала 22 и второго входного вала 28 изменяет величину вращения входной шестерни 62 тремя планетарными шестернями 36.
Пружина растяжения 40 смещает кольцевую шестерню 30 в нормальное положение (по отношению к корпусу 50), показанное на фиг. 1-3, причем пружина 40 располагается вертикально. Это предотвращает свободное вращение кольцевой шестерни 30 в случае отказа электродвигателя 26. Таким образом, пружина 40 выполняет функцию предохранительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ОСИ С МЕХАНИЗМОМ ПРИВОДА С РАСПРЕДЕЛЕНИЕМ КРУТЯЩЕГО МОМЕНТА | 2011 |
|
RU2569722C2 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2659163C2 |
| РУЛЕВОЙ КЛАПАН С ПЛАНЕТАРНОЙ ПЕРЕДАЧЕЙ | 2010 |
|
RU2524506C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ДВИГАТЕЛЯ ДЛЯ ГИБРИДНОГО АВТОМОБИЛЯ | 2010 |
|
RU2499704C1 |
| ЗАГРУЗОЧНАЯ УСТАНОВКА ШАХТНОЙ ПЕЧИ С ПРИВОДНЫМ МЕХАНИЗМОМ ДЛЯ РАСПРЕДЕЛИТЕЛЬНОГО ЛОТКА | 2010 |
|
RU2501863C2 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО | 1991 |
|
RU2114345C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ | 2012 |
|
RU2606423C2 |
| ВЫСОКОПРОИЗВОДИТЕЛЬНАЯ ПРОМЫШЛЕННАЯ ТРАНСМИССИЯ | 2017 |
|
RU2748925C2 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757548C2 |
| ОБЪЕМНОЕ УСТРОЙСТВО СЦЕПЛЕНИЯ. ПЕРЕДАЧА | 1994 |
|
RU2126500C1 |
Изобретение относится к системе улучшения устойчивости и управляемости воздушного судна. Система улучшения устойчивости и управляемости (10) воздушного судна содержит первый входной вал (22), передающий первый входной крутящий момент, второй входной вал (28), передающий второй входной крутящий момент и устройство суммирования первого и второго входных крутящих моментов для создания выходного крутящего момента для управления исполнительным механизмом. Устройство содержит планетарную передачу в сборе (20), корпус (50), закрывающий, по меньшей мере, часть планетарной передачи в сборе (20) и центрирующий механизм для смещения планетарной передачи в сборе в заданное положение по отношению к корпусу. В указанной планетарной передаче (20) каждая планетарная шестерня (36) подвижно соединена как с кольцевой шестерней (30), так и с солнечной шестерней (24). Центрирующий механизм содержит упругий элемент, расположенный между кольцевой шестерней и корпусом. Упругий элемент содержит пружину растяжения. Изобретение упрощает конструкцию системы улучшения устойчивости и управляемости. 2 н. и 7 з.п. ф-лы. 4 ил.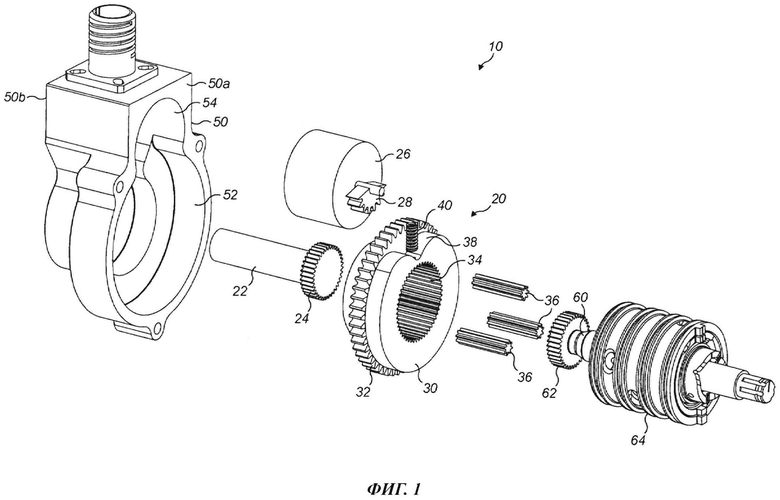
1. Система улучшения устойчивости и управляемости (СУУ) воздушного судна, содержащая:
первый входной вал, передающий первый входной крутящий момент;
второй входной вал, передающий второй входной крутящий момент; и
устройство суммирования первого и второго входных крутящих моментов для создания выходного крутящего момента для управления исполнительным механизмом, причем устройство содержит планетарную передачу в сборе, содержащую кольцевую шестерню, солнечную шестерню и некоторое количество планетарных шестерен, причем каждая планетарная шестерня подвижно соединена как с кольцевой шестерней, так и с солнечной шестерней;
корпус, закрывающий по меньшей мере часть планетарной передачи в сборе; и
центрирующий механизм для смещения планетарной передачи в сборе в заданное положение по отношению к корпусу, причем центрирующий механизм содержит упругий элемент, расположенный между кольцевой шестерней и корпусом, и упругий элемент содержит пружину растяжения.
2. СУУ по п. 1, дополнительно содержащая:
устройство ввода командных сигналов от летчика, выполненное с возможностью управления вращением первого входного вала; и/или
бортовой вычислитель, выполненный с возможностью управления вращением второго входного вала.
3. СУУ по п. 1 или 2, дополнительно содержащая электрический двигатель, выполненный с возможностью вращения второго входного вала.
4. СУУ по п. 3, отличающаяся тем, что угол поворота второго входного вала может:
пошагово управляться электродвигателем; и/или
определятся датчиком относительного положения.
5. СУУ по п. 1, отличающаяся тем, что второй входной вал подвижно соединен с кольцевой шестерней.
6. СУУ по п. 1, отличающаяся тем, что первый входной вал подвижно соединен с солнечной шестерней.
7. СУУ по п. 1, отличающаяся тем, что планетарные шестерни создают выходной крутящий момент для управления исполнительным механизмом.
8. СУУ по любому из пп. 1, 2, 4-7, дополнительно содержащая исполнительный механизм, который подвижно соединен с вращающимся выходом устройства суммирования.
9. Способ управления исполнительным механизмом, включающий использование СУУ по любому из предшествующих пунктов.
| US 4533097 А, 06.08.1985 | |||
| US 2013249444 A1, 26.09.2013 | |||
| WO 8702106 A1, 09.04.1987 | |||
| ПРИВОДНОЙ ЭЛЕКТРОМЕХАНИЗМ | 2003 |
|
RU2277195C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2004 |
|
RU2312794C2 |

