Настоящее изобретение относится к винту для способного к зависанию летательного аппарата, в частности к винту для вертолета.
УРОВЕНЬ ТЕХНИКИ
Известно, что вертолеты в своей основе содержат фюзеляж, несущий винт, расположенный на верхней части фюзеляжа и вращаемый вокруг его собственной оси, и хвостовой винт, расположенный на конце фюзеляжа.
Более подробно, винт, в свою очередь, в своей основе содержит втулку, вращаемую вокруг вышеупомянутой оси и оборудованную группой лопастей, радиально прикрепленных к и выступающих из вышеуказанной втулки, и колонку, которая может быть соединена с приводным элементом и функционально соединена с втулкой для приведения ее во вращение.
При использовании работа винта вызывает создание высокочастотных и низкочастотных вибраций. Конкретнее, низкочастотные вибрации генерируются спутной струей, отделяющейся от лопастей и от центра втулки. Это отделение происходит в центре втулки и влияет на все вертикальные и горизонтальные аэродинамические поверхности хвостовой части и хвостового винта.
При использовании вращение лопастей с высокими угловыми скоростями вызывает генерацию дополнительных высокочастотных вибраций, которые передаются на колонку и, следовательно, на фюзеляж, ухудшая комфорт для находящихся внутри фюзеляжа людей.
Конкретнее, вибрационные нагрузки воздействуют и на втулку, и на колонку, и в осевом направлении, и перпендикулярно оси вращения колонки.
В отрасли известно, что во вращающейся эталонной системе и, таким образом, выполненной за одно целое с винтом, втулкой и колонкой вибрационные нагрузки, действующие в плоскости винта, имеют импульсы, равные (N+1)*Ω, (N-1)*Ω и кратным им величинам, где Ω - скорость вращения колонки, а N представляет число лопастей винта. Также известно, что при переходе от вращающейся системы к неподвижной системе фюзеляжа вибрационные нагрузки, действующие в плоскости винта, испытывают сдвиг частоты и имеют импульсы, равные N*Ω и связанным кратным им величинам, на неподвижной системе. Другими словами, втулка и колонка передают импульсы вибрационных аэродинамических нагрузок, действующие в плоскости лопастей, на вышеуказанные импульсы.
Исходя из вышеизложенного, в отрасли явно ощущается необходимость в ограничении передачи от колонки на фюзеляж вибраций с вышеупомянутыми импульсами, равными произведению скорости вращения колонки и числа лопастей винта.
С этой целью известны пассивные и активные демпфирующие устройства.
Пассивные демпфирующие устройства в своей основе содержат массы, упруго подвешенные к колонке или втулке. Вибрация этих подвешенных масс позволяет по меньшей мере частично рассеивать вибрацию на колонке и втулке.
Хотя они просты для сборки и установки и не требуют источников энергии снаружи винта, пассивные демпфирующие устройства имеют максимальные ограничения относительно производительности, которую они могут предложить.
Активные демпфирующие устройства по своей сути представляют собой исполнительные механизмы, которые прикладывают синусоидальную демпфирующую силу к втулке или к колонке, которая противодействует силе, сгенерированной вибрациями.
Пример этих активных демпфирующих устройств показан в заявке на патент EP-A-2857313 от имени заявителя.
Эта заявка на патент иллюстрирует использование пары исполнительных механизмов, функционально соединенных с колонкой и управляемых так, чтобы генерировать соответственные демпфирующие силы на колонке, имеющей компоненты в плоскости, перпендикулярной оси вращения колонки.
Более подробно, исполнительные механизмы имеют форму, подобную кольцам, один поверх другого, приводятся во вращение колонкой и установлены с возможностью вращения в отношении колонки вокруг оси вращения.
Исполнительные механизмы совершают противоположное вращение вокруг оси вращения колонки и генерируют соответственные силы на колонке, равные произведению скорости вращения колонки и числа лопастей винта, для противодействия вышеупомянутой угловой частоте.
Дополнительные примеры активных демпфирующих устройств описаны в заявке на патент US-A-2016/0325828 и в патенте US-B-8,435200.
Активные демпфирующие устройства имеют преимущество в способности модифицировать их характеристики демпфирования согласно развитию вибрационных условий втулки и колонки.
Однако активные демпфирующие устройства по своей природе более сложные, чем пассивные демпфирующие устройства, с точки зрения веса, питания и объема. Более того, их необходимо питать значительным количеством энергии.
В отрасти существует осведомленность о необходимости демпфирования изгибных вибраций колонки и втулки, сохраняя эффективность вышеупомянутых активных демпфирующих устройств и в то же время ограничивая по мере возможности необходимость в специальных приводных элементах так, чтобы уменьшать вес, объем и общие затраты.
В отрасли также существует осведомленность о необходимости делать значение демпфирующей силы, прикладываемой к колонке, настолько точным и воспроизводимым, насколько это возможно, так, чтобы выполнять действие по демпфированию вибраций настолько точно и воспроизводимо, насколько это возможно.
В дополнение, существует осведомленность о необходимости иметь способность регулировать фазу и амплитуду демпфирующей силы, прикладываемой к колонке, в зависимости от разных вибрационных условий фюзеляжа.
Наконец, в отрасли существует осведомленность о необходимости держать возникновение нежелательных вибрационных нагрузок под контролем в случае выхода из строя одного из приводных элементов.
GB-A-1120193 раскрывает винт для летательного аппарата согласно ограничительной части пункта 1 формулы изобретения.
US-A-2014/360830 раскрывает винт для летательного аппарата, содержащий втулку, колонку, демпфирующее средство с по меньшей мере одной первой массой и по меньшей мере одной второй массой и блок передачи, который приводит первую и вторую массу во вращение в противоположных направлениях.
Вышеуказанная задача решается с помощью настоящего изобретения в части, касающейся винта для способного к зависанию летательного аппарата, определенному в пункте 1 формулы изобретения.
Настоящее изобретение также относится к винту для способного к зависанию летательного аппарата, который заявлен в пункте 10 формулы изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является производство винта для летательного аппарата, способного к зависанию, который позволяет удовлетворять по меньшей мере одну из определенных выше необходимостей простым и недорогим образом.
Вышеуказанная задача решается с помощью настоящего изобретения в части, касающейся винта для способного к зависанию летательного аппарата, который определен в пункте 1 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже описаны четыре предпочтительных варианта выполнения исключительно в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
- Фигура 1 представляет собой вид сбоку вертолета, содержащего винт согласно первому варианту выполнения настоящего изобретения;
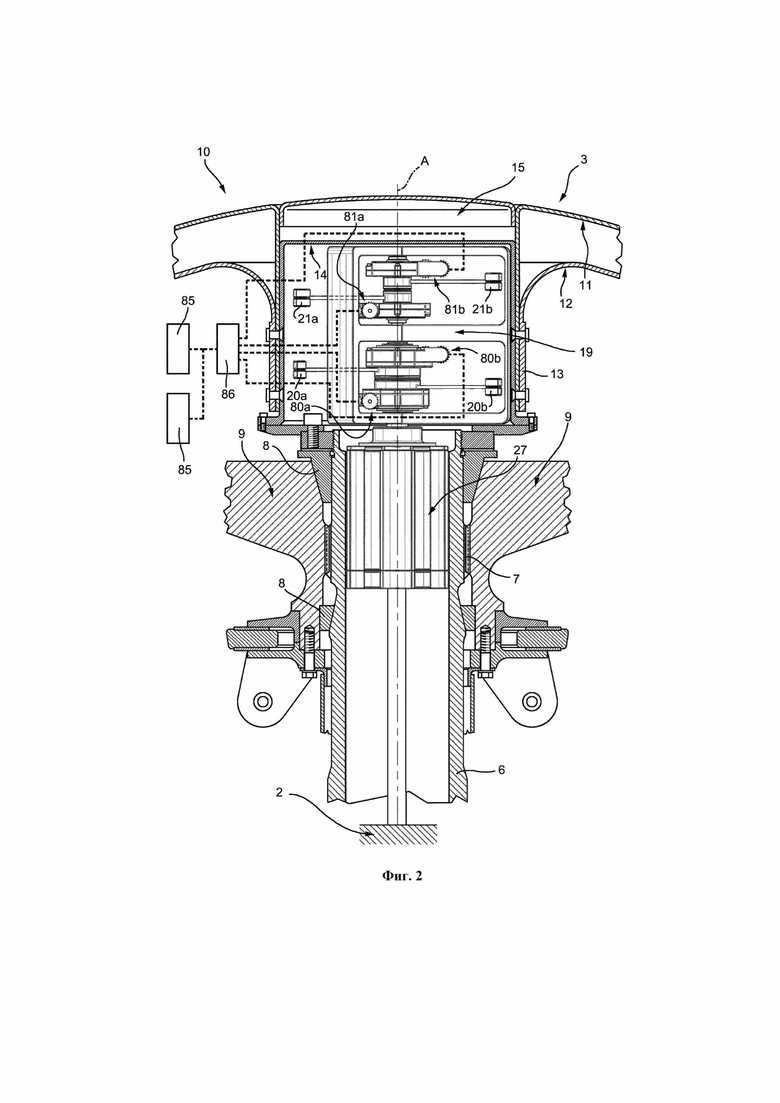
- Фигура 2 показывает в разрезе демпфирующее устройство, включенное в винт на Фигуре 1, с частями, показанными не полностью для ясности;
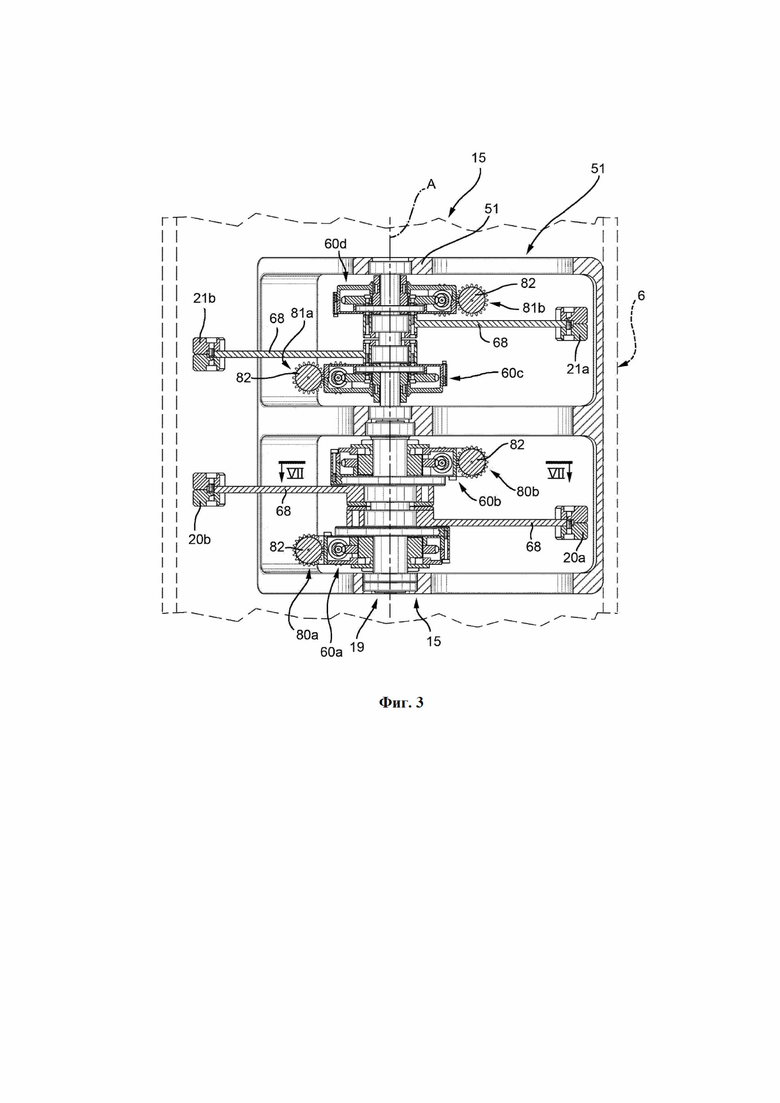
- Фигура 3 показывает в увеличенном масштабе первые компоненты винта на Фигуре 2;
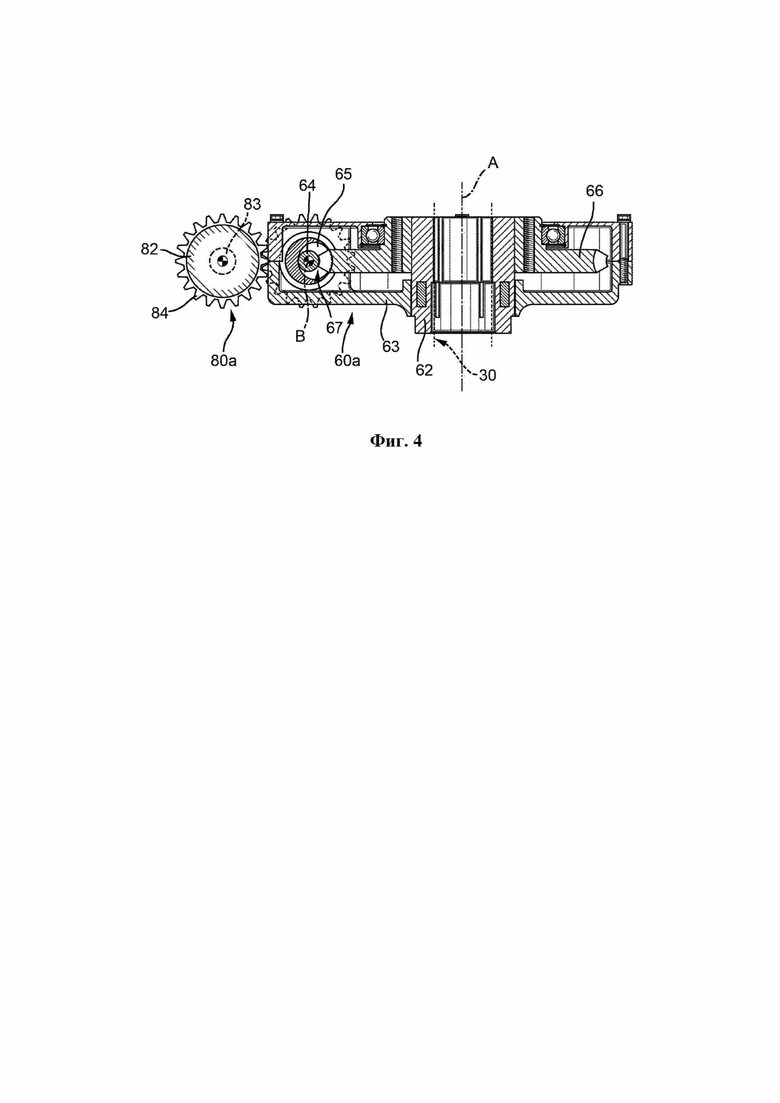
- Фигура 4 показывает в еще более увеличенном масштабе вторые компоненты демпфирующего устройства на Фигуре 3;
- Фигура 5 показывает в сильно увеличенном масштабе и в поперечном разрезе определенные детали демпфирующего устройства на Фигуре 2;
- Фигура 6 представляет собой вид сверху первых компонентов на Фигуре 3;
- Фигура 7 представляет собой вид сверху вторых компонентов на Фигуре 4;
- Фигура 8 представляет собой рабочую схему первых компонентов на Фигуре 5;
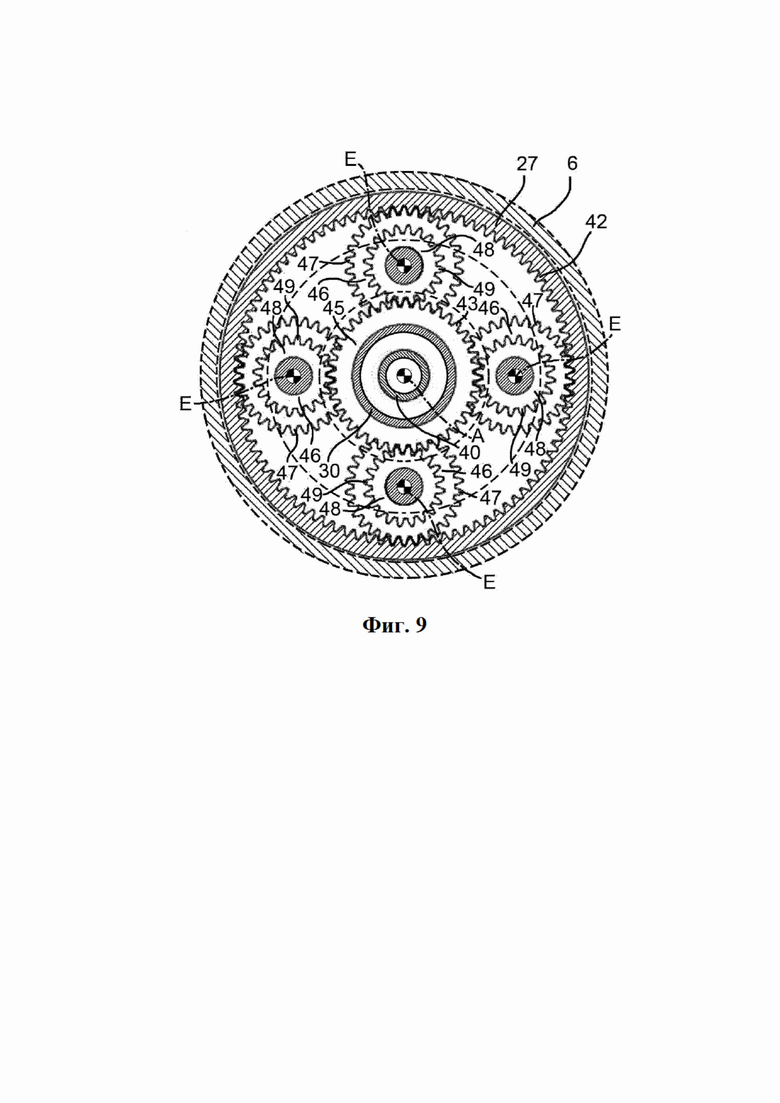
- Фигура 9 представляет собой разрез по линии IX-IX на Фигуре 8;
- Фигура 10 представляет собой разрез по линии X-X на Фигуре 8;
- Фигура 11 показывает в поперечном разрезе винт согласно дополнительному варианту выполнения настоящего изобретения с частями, не полностью показанными для ясности;
- Фигура 12 представляет собой разрез по линии XII-XII на Фигуре 11;
- Фигура 13 показывает в поперечном разрезе винт согласно третьему варианту выполнения настоящего изобретения с частями, удаленными для ясности; и
- Фигура 14 показывает в поперечном разрезе винт согласно четвертому варианту выполнения настоящего изобретения с частями, удаленными для ясности.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на Фигуру 1 ссылочная позиция 1 обозначает способный к зависанию летательный аппарат, в частности, вертолет, в своей основе содержащий фюзеляж 2, несущий винт 3, расположенный на верхней части фюзеляжа 2 и вращающийся вокруг оси A, и хвостовой винт 4, расположенный на одном конце фюзеляжа 2 и вращающийся вокруг его собственной оси, поперечной оси А.
Более подробно, винт 3 содержит полую втулку 5 с осью А, удерживающую группу консольно установленных лопастей 9, которые продолжаются радиально к оси А.
Со ссылкой на Фигуру 2 винт 3 также содержит колонку 6, вращаемую вокруг оси A с угловой скоростью Ω в отношении эталонной системы, выполненной за одно целое с фюзеляжем 2, выполненную под углом за одно целое с втулкой 5 и соединенную не показанным образом с приводным элементом, например, турбиной, удерживаемой вертолетом 1.
Конкретнее, колонка 6 частично размещена внутри втулки 5 и выполнена под углом за одно целое с втулкой 5 (Фигура 2).
Конкретнее, колонка 6 выполнена под углом за одно целое с втулкой 5 посредством шлицевого профиля 7 и пары клиньев 8, радиально расположенных между колонкой 6 и втулкой 5. В частности, шлицевой профиль 7 в осевом направлении расположен между вышеуказанными клиньями 8.
В частности, колонка 6 является полой.
Несущий винт 3 также содержит конвейер 10 потока, выполненный с возможностью направления потока воздуха, сгенерированного вращением винта 3, согласно заранее определенной траектории, имеющей такую форму, чтобы ограничивать вибрации, генерируемые отделением вышеуказанного потока от законцовок лопастей 9, расположенных на конце, противоположном втулке 5.
Более подробно, конвейер 10 потока является кольцеобразным, продолжается вокруг оси А и расположен на противоположной стороне втулки 5 в отношении фюзеляжа 2.
Конвейер 10 потока имеет шляпообразную форму и ограничен парой поверхностей 11 и 12, в осевом направлении обращенных друг к другу; конкретнее, поверхность 11 в осевом направлении ограничивает конвейер 10 потока на стороне, противоположной втулке 5, тогда как поверхность 12 в осевом направлении ограничивает конвейер 10 потока на стороне, ближайшей к втулке 5.
Поверхность 11 является непрерывной и продолжается, проходя в радиальном направлении, начиная от оси А, на в осевом направлении уменьшающемся расстоянии от втулки 5.
Поверхность 12 имеет первый круглый периферийный край 13 и второй периферийный край (не показан на Фигуре 2), противоположный краю 13 и расположенный радиально наиболее удаленным от периферийного края 13. Более того, второй периферийный край поверхности 12 в осевом направлении обращен к периферийному краю поверхности 11.
Поверхности 11 и 12 имеют такую форму, что их осевое расстояние уменьшается при прохождении в радиальном направлении, начиная от оси А.
Конкретнее, поверхность 12 при прохождении от края 13 по направлению ко второму краю первая перемещается в сторону от втулки 5 и затем перемещается ближе к втулке 5.
Поверхности 11 и 12 соединены друг с другом трубчатой частью 14, симметричной в отношении оси А и имеющей боковую поверхность, продолжающуюся между поверхностями 11 и 12.
Винт 3 дополнительно содержит демпфирующее вибрации устройство 15 для демпфирования передачи вибраций на колонку 6 в плоскости, перпендикулярной оси А. Другими словами, устройство 15 демпфирует изгибные вибрации колонки 6.
Более подробно, устройство 15 содержит пару масс 20a, 20b и пару масс 21a, 21b, которые могут эксцентрично вращаться вокруг оси А с первый и второй угловой скоростью.
Массы 20a, 20b; 21a, 21b соединены с колонкой 6.
Таким образом, массы 20a, 20b генерируют первые демпфирующие силы на колонке 6, а массы 21a, 21b генерируют вторые демпфирующие силы на колонке 6.
Первые и вторые демпфирующие силы соответствуют центробежным силам, генерируемым на колонке 6 эксцентричным вращением масс 20a, 20b; 21a, 21b на колонке 6.
Эти первые и вторые демпфирующие силы имеют синусоидальную траекторию, амплитуду, зависящую от величины соответственных масс 20a, 20b; 21a, 21 и от соответственных расстояний этих масс 20a, 20b; 21a, 21b от оси А и соответственных скоростей вращения вокруг оси A.
Первые и вторые демпфирующие силы генерируют соответственные первую и вторую результирующие силы с синусоидальной траекторией, амплитуда и фаза которых зависит от углового расстояния соответственные масс 20a, 20b; 21a, 21b относительно оси А. Например, когда угол между массами 20a, 20b; 21a, 21b равен нулю, первая (вторая) результирующая сила имеет максимальную амплитуду. И наоборот, когда этот угол равен ста восьмидесяти градусам, первая (вторая) результирующая сила имеет нулевую амплитуду.
Предпочтительно, массы 20a, 20b являются вращаемыми вокруг оси А в отношении колонки 6 в том же направлении вращения колонки 6 вокруг оси A и с угловой скоростью (N-1)*Ω относительно колонки 6, где N - число лопастей 9, а Ω - скорость углового вращения колонки 6. Таким образом, первая демпфирующая сила является синусоидальной с угловой частотой N*Ω в отношении эталонной системы, выполненной за одно целое с фюзеляжем.
В настоящем описании термин «угловая частота» означает частоту, умноженную на 2π.
Массы 21a, 21b вращаются вокруг оси А в направлении, противоположном направлению вращения колонки 6, и с угловой частотой (N+1)*Ω относительно колонки 6.
Там, где прямо не указано, ниже в настоящем описании понятно, что угловая скорость (N-1)*Ω имеет такое же направление, что и угловая скорость Ω колонки 6, и что угловая скорость (N+1)*Ω имеет направление, противоположное угловой скорости Ω колонки 6, и что угловые скорости (N-1)*Ω и (N+1)*Ω следует рассматривать в эталонной системе, выполненной за одно целое с колонкой 6.
Таким образом, и первые, и вторые демпфирующие силы имеют угловую частоту N*Ω в эталонной системе, выполненной за одно целое с фюзеляжем 2. Эта угловая частота N*Ω соответствует угловой частоте вибраций, подлежащих демпфированию, т.е. вибраций, передаваемых от лопастей 9 на фюзеляж 2.
Первые демпфирующие силы равны друг другу по величине, и вторые демпфирующие силы равны друг другу по величине.
Массы 20a, 20b; 21a, 21b равны друг другу попарно.
В показанном случае массы 20a и 20b равны массам 21a и 21b.
В дополнительном варианте выполнения, который не показан, массы 20a, 20b; 21a, 21b могли иметь значения, отличные друг от друга.
Предпочтительно, винт 3 содержит блок 19 передачи (Фигура 8), функционально расположенный между колонкой 6 и массами 20a, 20b; 21a, 21b так, чтобы приводить вышеуказанные массы 20a, 20b; 21a, 21b во вращение соответственно с угловыми скоростями (N-1)*Ω; (N+1)*Ω в отношении колонки 6 и в соответственных взаимно противоположных направлениях вращения.
Таким образом, массы 20a, 20b; 21a, 21b могут быть приведены во вращение с соответственными скоростями вращения (N-1)*Ω; (N+1)*Ω без использования исполнительных механизмов или источников энергии снаружи колонки 6.
Предпочтительно, блок 19 передачи содержит (Фигура 5):
- ступень 25, которая принимает движение от вращающейся колонки 6 с угловой скоростью Ω и имеет на выходе вал 30, выполненный под углом за одно целое с массами 20a; 20b и вращающийся со скоростью вращения (N-1)*Ω в том же направлении, что и направление вращения колонки 6; и
- ступень 26, которая принимает движение от вала 30 и имеет на выходе вал 40, выполненный под углом за одно целое с массами 21a; 21b и вращающийся со скоростью вращения (N+1)*Ω в направлении, противоположном направлению вращения колонки 6.
В частности, валы 30 и 40 вращаются вокруг оси А и размещены внутри колонки 6. Вал 40 соосен с валом 30 и размещен внутри вала 30.
Вал 30 вращается в том же направлении, что и колонка 6, тогда как вал 40 вращается в направлении, противоположном колонке 6 и валу 30.
В показанном случае массы 20a, 20b, 21а, 21b расположены внутри части 14 конвейера 10 потока, как может быть видно на Фигуре 2.
Ступени 25, 26 представляют собой соответственные эпициклические передачи.
Более подробно, ступень 25 содержит (Фигура 8-10):
- трубчатый кожух 27, установленный соосно внутри колонки 6 так, что он может вращаться вокруг оси А с такой же угловой скоростью Ω колонки 6, и образующий зубья 31 шестерни, радиально внутренние в отношении оси А;
- водило 28 планетарной шестерни, прикрепленное к фюзеляжу 2 и в связи с этим под углом неподвижное в отношении оси А;
- солнечную шестерню 29, вращаемую вокруг оси А, образующую зубья 32 шестерни, радиально внешние в отношении оси А и выполненные под углом за одно целое с валом 30.
Ступень 25 дополнительно содержит:
- группу, три в показанном случае, планетарных шестерен 33, вращаемых вокруг их собственных осей C, параллельных оси A, и имеющих соответственные внешние зубья 34 шестерен в отношении связанных осей C и сцепляющихся с зубьями 31 шестерни кожуха 27; и
- группу, три в показанном случае, планетарных шестерен 35, вращаемых вокруг их собственных осей D, параллельных осям A, C, и имеющих соответственные внешние зубья 36 шестерен в отношении связанных осей C, каждая из которых сцепляется с зубьями 34 шестерни соответственной планетарной 33 шестерни.
Водило 28 планетарной шестерни содержит группу рычагов 44; 39, параллельных соответственным осям C и D и вокруг которых могут вращаться соответственные планетарные 33, 35, 37 шестерни.
Колонка 6 и вал 30 поворачиваются в одном и том же направлении вращения благодаря наличию планетарных шестерен 33, 35.
Другими словами, ступень 25 представляет собой эпициклическую передачу, в которой:
- кожух 27 определяет входное движение и образует кольцевую шестерню, вращающуюся с угловой скоростью Ω вокруг оси A в эталонной системе, выполненной за одно целое с фюзеляжем 2;
- солнечная шестерня 29 вращается с угловой скоростью (N-1)*Ω вокруг оси A и определяет выходное движение; и
- водило 28 планетарной шестерни под углом неподвижно в отношении оси А.
Ступень 26 содержит, в частности:
- кольцевую шестерню 41, размещенную внутри колонки 6, в осевом направлении расположенную между солнечной шестерней 29 и валом 30 и выполненную под углом за одно целое с солнечной шестерней 29 и валом 30 и содержащую внутренние зубья 42 шестерни в отношении оси А; и
- солнечную шестерню 45, вращаемую вокруг оси А с угловой скоростью (N+1)*Ω и выполненную под углом за одно целое с валом 40 и содержащую внешние зубья 43 шестерни в отношении оси А.
Ступень 26 дополнительно содержит:
- группу, три в показанном случае, планетарных шестерен 46, вращаемых вокруг их собственных осей E, параллельных оси A, и имеющих соответственные внешние зубья 47 шестерен в отношении связанных осей E и сцепляющихся с зубьями 42 шестерни кольцевой шестерни 41; и
- группу, три в показанном случае, планетарных шестерен 48, выполненных под углом за одно целое с планетарными шестернями 46 и имеющих соответственные внешние зубья 49 шестерен в отношении связанных осей E и сцепляющихся с зубьями 43 шестерни солнечной шестерни 45.
В частности, оси E радиально расположены между соответственными осями C и D.
Более того, диаметр планетарных шестерен 46 больше, чем диаметр планетарных шестерен 48.
Водило 28 планетарной шестерни содержит пару рычагов 50, параллельных соответственным осям E и вокруг которых могут вращаться соответственные планетарные шестерни 46, 48.
Другими словами, ступень 26 представляет собой эпициклическую передачу, в которой:
- кольцевая шестерня 41 определяет входное движение с угловой скоростью (N-1)*Ω в том же направлении, что и направление вращения колонки 6, и выполнена под углом за одно целое с солнечной шестерней 29 ступени 25;
- солнечная шестерня 45 вращается с угловой скоростью (N+1)*Ω в направлении, противоположном направлению вращения колонки 6, и определяет выходное движение; и
- водило 28 планетарной шестерни неподвижно и используется совместно со ступенью 25.
Винт 3 также содержит (Фигуры 3, 4, 6 и 7):
- группы 60a, 60b соединений для соединения вала 30 и соответственных масс 20a, 20b под углом вместе вокруг оси A; и
- группы 61a, 61b соединений для соединения вала 40 и соответственных масс 21a, 21b под углом вокруг оси A.
С особой ссылкой на Фигуру 6 группы 60a, 60b; 60c, 60d соединений размещены внутри кожуха 51, выполненного под углом за одно целое с колонкой 6, и размещены внутри колонки 6.
В дальнейшем будет описана только одна группа 60a, 60b, 61b, 61b соединений, так как эти группы 60a, 60b, 61a, 61b соединений идентичны.
Группа 60a, 60b (61a, 61b) соединений в своей основе содержит (Фигуры 4, 6 и 7):
- втулку 62, установленную на валу 30 соосно с осью А; и
- кожух 63, окружающий втулку 62, приводимый во вращение втулкой 62 и под углом соединенный с массами 20a, 20b (21а, 21b) образом, который будет описан подробно дополнительно в этом описании.
Более подробно, кожух 63 продолжается вокруг оси А и вмещает:
- вал 64, вращаемый вокруг оси B, перпендикулярной и смещенной от оси А в отношении кожуха 63, и выполненный под углом за одно целое с кожухом 63 вокруг оси A;
- червячный винт 65, вращающийся за одно целое с валом 64 вокруг оси B; и
- диск 66, установленный образом, под углом подвижным вокруг оси A в отношении втулки 62 и вала 30 (40), оборудованный спиральными зубьями 67 шестерни, внешними в отношении оси А и сцепляющимися с червячным винтом 65, и выполненный под углом за одно целое с массой 20a, 20b (21а, 21b).
Кожух 63 также выполняет функцию содержания масла, необходимого для смазки перемещения вала 64 и диска 66, и защиты червячного винта 65.
Диск 66 также соединен выполненным под углом за одно целое образом со связанным рычагом 68 (Фигуры 3 и 6). Рычаг 68 продолжается радиально только от одной стороны оси А и удерживает нависающей на его противоположном конце до оси связанную массу 20a, 20b (21а, 21b).
Червячный винт 65 и зубья 67 шестерни диска 66 выполнены так, чтобы создавать условие необратимого движения.
В частности, вращение червячного винта 65 вокруг оси B вызывает вращение диска 66 и в связи с этим массы 20a, 20b (21а, 21b) вокруг оси A на заранее определенный угол. И наоборот, вращение диска 66 вокруг оси A не вызывает вращения червячного винта 65 вокруг оси B.
И вышеприведенного следует, что вращение вала 30 вокруг оси A приводит червячный винт 65, диск 66 и массы 20a, 20b (21а, 21b) во вращение с одной и той же угловой скоростью (N-1)*Ω ((N+1)*Ω) вокруг оси A.
Важно отметить, что условие необратимого движения, существующее между червячным винтом 65 и зубьями 67 шестерни, предотвращает вызывание инерцией диска 66 относительного перемещения между червячным винтом 65 и зубьями 67 шестерни, когда червячный винт 65 под углом неподвижен в отношении оси B. Другими словами, когда червячный винт 65 под углом неподвижен в отношении оси B, червячный винт 65 и диск 66 ведут себя как части, жестко соединенные друг с другом, и вращаются за одно целое вокруг оси A.
Предпочтительно, винт 3 дополнительно содержит группу исполнительных механизмов 80a, 80b; 81a, 81b (Фигуры 3, 4, 6 и 7), выборочно выполненных с возможностью изменения фазы и амплитуды первой и второй результирующих сил, генерируемых вращением массы 20a, 20b; 21a, 21b на колонке 6.
Более подробно, исполнительные механизмы 80a, 80b выборочно выполнены с возможностью изменения угла между массами 20a, 20b вокруг оси A так, чтобы изменять фазу и амплитуду первой результирующей силы.
Исполнительные механизмы 81a, 81b выборочно выполнены с возможностью изменения угла между массами 21a, 21b вокруг оси A так, чтобы изменять фазу и амплитуду второй результирующей силы.
С особой ссылкой на Фигуры 3-7 каждый исполнительный механизм 80a, 80b; 81a, 81b содержит:
- электрический двигатель 82, имеющий выходной вал 83, вращаемый вокруг оси, параллельной и смещенной от оси B; и
- шестерню 84, расположенную между электрическим двигателем 82 и связанным валом 64 и выполненную с возможностью преобразования вращения выходного вала 83 параллельно оси B во вращение вала 64 и червячного винта 65 вокруг оси B.
Электрический двигатель 82 размещен снаружи связанного кожуха 63.
Электрический двигатель 82 выполнен под углом за одно целое со связанным кожухом 63 и в связи с этим с валом 30 (40) вокруг оси A.
Следовательно, и при включении, и при выключении электрический двигатель 82 вращается вокруг оси A с угловой скоростью (N-1)*Ω, ((N+1)*Ω) за одно целое с валом 30 (40) и с кожухом 63.
И наоборот, включение электрического двигателя 82 вызывает вращение валов 83, 64 параллельно оси B и червячного винта 65 вокруг оси B в отношении кожуха 63 и вала 30 (40).
Вращение червячного винта 65 вокруг оси B вызывает вращение диска 66 и рычага 68 связанной массы 20a, 20b (21а, 21b) вокруг оси A.
Другими словами, каждый исполнительный механизм 80a, 80b; 81a, 81b посредством выборочного включения соответствующего электрического двигателя 82 вызывает дополнительное вращение связанной массы 20a, 20b; 21a, 21b вокруг оси A на заранее определенный угол в отношении связанного вала 30; 40. Это вращение способствует непрерывному вращению масс 20a, 20b; 21a, 21b с соответственными угловыми скоростями (N-1)*Ω; (N+1)*Ω вокруг оси A.
Винт 3 дополнительно содержит:
- первое скользящее кольцо (не показано) для электрического соединения источника электропитания, выполненного на фюзеляже 2, с электрическими двигателями 82 исполнительных механизмов 80a, 80b; и
- второе скользящее кольцо (также не показано) для электрического соединения источника электричества с электрическими двигателями 82 исполнительных механизмов 81a, 81b.
Наконец, винт 3 содержит:
- группу датчиков 85 (схематически показанных на Фигуре 2), способных генерировать группу сигналов, связанных с состоянием ускорения фюзеляжа 2 в плоскости, перпендикулярной оси А; и
- блок 86 управления (также схематически показанный на Фигуре 2), выполненный с возможностью генерации на основе одного из сигналов, сгенерированных датчиками 85, сигнала управления для исполнительных механизмов 80a, 80b, 81a, 81b.
При использовании колонка 6 приводит втулку 5 и лопасти 9 во вращение вокруг оси A.
Конкретнее, колонка 6 вращается вокруг оси A с угловой скоростью Ω в отношении эталонной системы, выполненной за одно целое с фюзеляжем 2.
Вращение втулки 5 и лопастей 9 генерирует вибрации, которые бы передавались на колонку 6 и от нее на фюзеляж 2 вертолета 1.
В отношении неподвижной системы фюзеляжа эти вибрации в основном имеют угловую частоту, равную N*Ω, где N - число лопастей 9, а Ω - скорость углового вращения колонки 6.
Для того, чтобы уменьшать эти вибрации, колонка 6 приводит, с помощью блока 19 передачи, массы 20a, 20b; 21a, 21b в эксцентричное вращение вокруг оси A с соответственными угловыми скоростями (N-1)*Ω; (N+1)*Ω и в соответственных направлениях в том же самом и в противоположном направлении в отношении направления вращения колонки 6.
За счет центробежного эффекта эти эксцентричные вращения масс 20a, 20b; 21a, 21b генерируют соответственные первые и вторые демпфирующие силы, воздействующие на колонку 6.
Конкретнее, первые и вторые демпфирующие силы являются синусоидальными и имеют соответственные угловые частоты, равные (N-1)*Ω и (N+1)*Ω, в эталонной системе, выполненной за одно целое с колонкой 6.
Эти первые и вторые демпфирующие силы противодействуют нагрузкам из-за этих вибраций в плоскости, перпендикулярной оси А.
Более того, эти первые и вторые демпфирующие силы имеют в эталонной системе, выполненной за одно целое с фюзеляжем 2, угловую частоту, равную N*Ω, т.е. угловую частоту возмущающих вибрационных сил, которые желательно демпфировать.
Первые и вторые демпфирующие силы генерируют соответственные первую и вторую результирующие силы на колонке 6.
Эти первая и вторая результирующие силы имеют амплитуду и фазу, зависящие от соответственного угла между массами 20a, 20b; 21a, 21b. Например, амплитуда этих первой и второй результирующих сил будет максимальной, когда угол между связанными массами 20a, 20b; 21a, 21b составляет нуль градусов, и минимальной, когда угол между связанными массами 20a, 20b; 21a, 21b составляет сто восемьдесят градусов.
Важно отметить, что массы 20a, 20b; 21a, 21b прикладывают соответственные первую и вторую результирующие силы к колонке 6 и вращаются с соответственными угловыми скоростями (N-1)*Ω; (N+1)*Ω и когда исполнительные механизмы 80a, 80b; 81a, 81b активированы, и когда они деактивированы.
При этом выборочная активация исполнительных механизмов 80a, 80b; 81a, 81b позволяет изменять амплитуду и фазу первой и второй результирующих сил на колонке 6.
Ниже описано функционирование винта 3, начиная с состояния, в котором исполнительные механизмы 80a, 80b; 81a, 81b деактивированы.
Колонка 6 приводит вал 30 с помощью ступени 25 блока 19 передачи и вал 40 с помощью ступени 26 блока 19 передачи во вращение вокруг оси A.
Ступени 25 и 26 имеют такие размеры, что валы 30 и 40 вращаются с соответственными угловыми скоростями (N-1)*Ω и (N-1)*Ω вокруг оси A в эталонной системе, выполненной за одно целое с колонкой 6.
В частности, колонка 6 и вал 30 вращаются в одном и том же направлении, а вал 40 вращается в направлении, противоположном колонке 6 и валу 30.
Валы 30; 40 приводят массы 20a, 20b; 21a, 21b во вращение вокруг оси A с соответственными угловыми скоростями (N-1)*Ω; (N-1)*Ω посредством связанных групп 60a, 60b; 61a, 61b соединений.
Более подробно, вал 30 (40) приводит во вращение за одно целое с ним самим и вокруг оси A узел, образованный втулкой 62, кожухом 63, валом 64, червячным винтом 65, диском 66 и исполнительным механизмом 80a, 80b (81a, 81b), связанным с соответственными группами 60a, 60b (61a, 61b) соединений.
В состоянии, когда исполнительные механизмы 80a, 80b; 81a, 81b деактивированы, электрические двигатели 82 не питаются, и в связи с этим червячный винт 65 под углом неподвижен в отношении оси B.
В этой ситуации червячный винт 65 и диск 66 связанных групп 60a, 60b (61a, 61b) соединений ведут себя как жестко соединенные части. Это происходит потому, что условие необратимого движения, существующее между червячным винтом 65 и зубьями 67 шестерни диска 66, предотвращает вызывание инерцией диска 66 относительного перемещения между червячным винтом 65 и зубьями 67 шестерни.
Следовательно, при вышеупомянутом условии диски 66 групп 60a, 60b (61a, 61b) соединений, хотя установлены подвижным под углом образом в отношении вала 30 (40) вокруг оси A, приводятся во вращение валом 30 (40) с соответственными угловыми скоростями (N-1)*Ω, ((N+1)*Ω).
Вращение дисков 66 с помощью рычагов 68 вызывает эксцентричное вращение связанных масс 20a, 20b; 21a, 21b вокруг оси A с соответственными угловыми скоростями (N-1)*Ω; (N+1)*Ω.
Функционирование винта 3 ниже описано со ссылкой на состояние активации исполнительных механизмов 80a, 80b, 81a, 81b.
Блок 86 управления принимает сигналы от датчиков 85, связанные с состоянием ускорения колонки 6, и генерирует сигналы управления для электрических двигателей 82 исполнительных механизмов 80a, 80b; 81a, 81b в случае обнаружения необходимости изменения фаз и амплитуд первой и второй результирующих сил.
Активация одного или более электрических двигателей 82 исполнительных механизмов 80a, 80b; 81a, 81b вызывает вращение соответственных выходных валов 83 вокруг соответственных осей B на заранее определенные углы.
Один или более выходных валов 83 приводят связанные валы 64 и червячные винты 65 во вращение посредством шестерней 84 вокруг соответственных осей B на заранее определенные углы.
Вращение одного или более червячных винтов 65 вызывает вращение одного или более дисков 66 и в связи с этим одной или более масс 20a, 20b; 21a, 21b в отношении колонки 6 и вокруг оси A на заранее определенный угол.
Со ссылкой на Фигуры 11 и 12 ссылочная позиция 3’ обозначает винт согласно второму варианту выполнения настоящего изобретения.
Винт 3’ аналогичен винту 3 и будет описан ниже только в отношении того, что отличает его от последнего; одинаковые или эквивалентные части винтов 3, 3’ будут обозначены там, где это возможно, одинаковыми ссылочными позициями.
В частности, винт 3’ отличается от винта 3 тем, что массы 20a, 20b; 21a, 21b, исполнительные механизмы 80a, 80b; 81a, 81b и группы 60a, 60b; 61a, 61b соединений размещены внутри части 14 конвейера 10 потока.
Более того, винт 3’ отличается от винта 3 тем, что массы 20a, 20b; 21a, 21b имеют форму, подобную соответственным роликам 22’, вращающимся вокруг соответственных осей, параллельных оси A, установленным подвижным образом в отношении связанных рычагов 68 радиально к оси А и катящимся по соответственным направляющим 23’, установленным в части 14 конвейера 10 потока.
Конкретнее, ролики 22’ продолжаются вокруг соответственных осей, параллельных оси A, и имеют соответственные осевые концы 24’, противоположные друг другу и радиально скользящие в соответствующие радиальные щели 18’, образованные свободными концами рычагов 68.
Функционирование винта 3’ полностью аналогично функционированию винта 3 и описано только в отношении того, что отличается от функционирования винта 3.
В частности, ролики 22’, образующие массы 20a, 20b; 21a, 21b, толкаются центробежной силой по направляющим 23’, установленным в части 14.
За счет того, что ролики 22’ могут скользить в отношении связанных рычагов 68 радиально к оси А, центробежные силы, воздействующие на ролики 22’, высвобождаются на части 14 конвейера 10 потока.
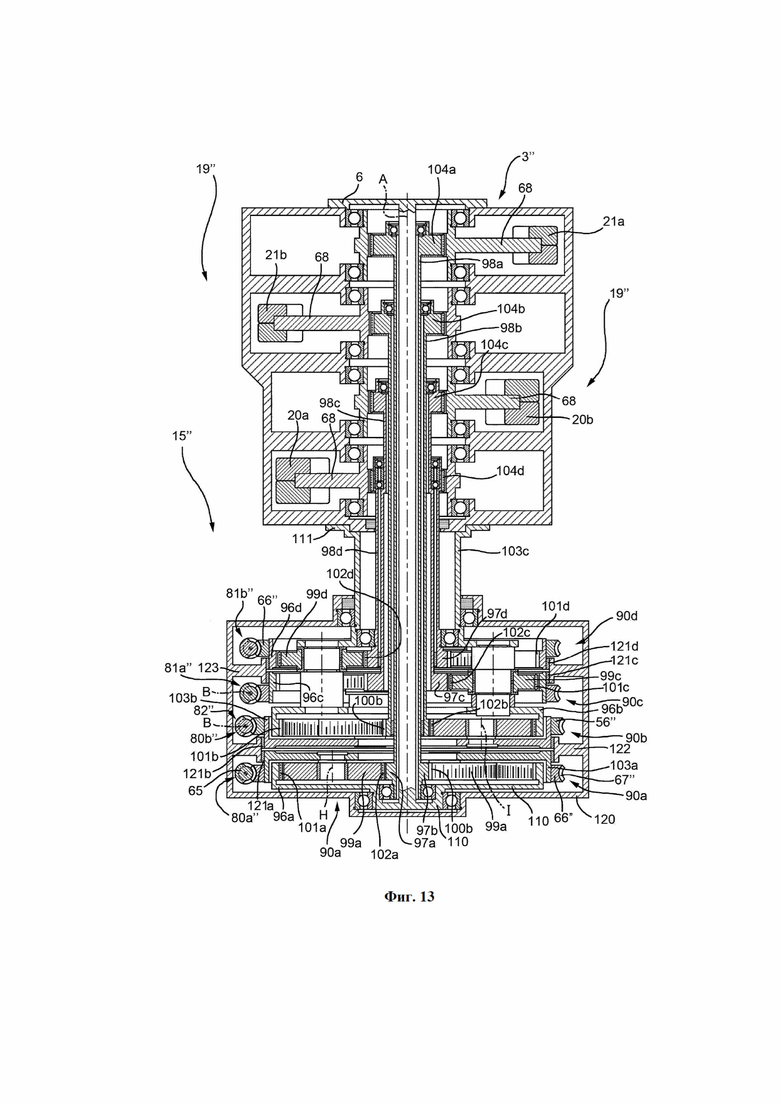
Со ссылкой на Фигуру 13 ссылочная позиция 3’’ обозначает винт согласно третьему варианту выполнения настоящего изобретения.
Винт 3’’ аналогичен винту 3 и будет описан ниже только в отношении того, что отличает его от последнего; одинаковые или эквивалентные части винтов 3, 3’’ будут обозначены там, где это возможно, одинаковыми ссылочными позициями.
Винт 3’’ отличается от винта 3 тем, что блок 19’’ передачи содержит группу ступеней 90a, 90b; 91a, 91b, которые принимают движение от колонки 6, вращающейся с угловой скоростью Ω, и приводят рычаг 68 связанных масс 20a, 20b; 21a, 21b во вращение с соответствующими угловыми скоростями (N-1)*Ω; (N+1)*Ω в эталонной системе, выполненной за одно целое с колонкой 6.
Более подробно, каждая ступень 90a, 90b; содержит:
- кольцевую шестерню 96a, 96b, определяющую входное движение и вращающуюся за одно целое с колонкой 6 вокруг оси A;
- солнечную шестерню 97a, 97b, соединенную с валом 98a, 98b и вращаемую вокруг оси А;
- группу, три в показанном случае, планетарных шестерен 99a, 99b, вращаемых вокруг их собственных осей H, параллельных и смещенных от оси А, и имеющих соответственные зубья 100a, 100b шестерен, сцепляющиеся на соответственных противоположных сторонах связанной оси H с зубьями 101a, 101b шестерни кольцевой шестерни 96a, 96b и с зубьями 102a, 102b шестерни солнечной шестерни 97a, 97b; и
- водило 103a, 103b планетарных шестерен, в отношении которого соответственные планетарные шестерни 99a, 99b вращаются вокруг их соответственных осей H.
Каждая ступень 90c, 90d содержит:
- кольцевую шестерню 96c, 96d;
- солнечную шестерню 97c, 97d, соединенную с валом 98c, 98d и вращаемую вокруг оси А;
- группу, три в показанном случае, планетарных шестерен 99c, 99d, вращаемых вокруг их собственных осей I, параллельных и смещенных от оси А, и имеющих соответственные зубья 100c, 100d шестерен, сцепляющиеся на соответственных противоположных сторонах связанной оси I с зубьями 101c, 101d шестерни кольцевой шестерни 96c, 96d и с зубьями 102c, 102d шестерни солнечной шестерни 97c, 97d; и
- водило 103c планетарной шестерни, общее для ступеней 90c, 90d, определяющее входное движение и вращающееся за одно целое с колонкой 6 вокруг оси A и прикрепленное к кольцевой шестерне 96b ступени 90b.
Планетарные шестерни 99c, 99d являются вращаемыми вокруг их собственных осей I в отношении общего водила 103c планетарной шестерни.
Каждая ступень 90a, 90b, 90c, 90d также содержит шпилеобразный элемент 104a, 104b, 104c, 104d, который соединяет участок соответственного вала 98a, 98b, 98c, 98d, расположенный на в осевом направлении противоположной стороне в отношении связанной солнечной шестерни 97a, 97b, 97c, 97d и радиально внешний в отношении оси А, с участком рычага 68 связанной массы 21a, 21b; 20a, 20b, расположенным радиально внутренним в отношении оси А.
В показанном случае кольцевая шестерня 96a соединена с фланцем 110, продолжающимся радиально наружу от колонки 6.
Кольцевая шестерня 96b и водила 103c планетарных шестерен соединены с полой частью 111, которая соединена с колонкой 6 на конце, в осевом направлении противоположном фланцу 110.
В показанном случае валы 98a, 98b, 98c, 98d расположены в этой последовательности при прохождении радиально на противоположной стороне оси А.
Вал 98a окружает колонку 6.
Часть 111 окружает валы 98a, 98b, 98c, 98d и колонку 6.
Более того, валы 98a, 98b, 98c, 98d имеют в этой последовательности уменьшающиеся длины, измеренные параллельно оси A.
Оси H радиально расположены между осью А и осью I.
Блок 19’’ передачи дополнительно содержит кожух 120, вмещающий ступени 90a, 90b, 90c, 90d и соединенный с фюзеляжем 2 образом, не показанным подробно.
Водила 103a, 103b планетарных шестерен и кольцевые шестерни 96c, 96d соединены с кожухом 120 соответственными кольцеобразными вкладышами 121a, 121b, 121c, 121d, соосными в отношении оси А.
В показанном случае вкладыши 121a, 121b; 121c, 121d радиально расположены между рычагами 122; 123, выступающими консольным образом из кожуха 120 по направлению к оси А, и соответственными водилами 103a, 103b планетарных шестерен и кольцевыми шестернями 96c, 96d.
Винт 3’’ также отличается от винта 3 тем, что исполнительные механизмы 80a’’, 80b’’, 81a’’, 81b’’ удерживаются водилами 103a, 103b планетарных шестерен и кольцевыми шестернями 96c, 96d соответственно.
Каждый исполнительный механизм 80a’’, 80b’’, 81a’’, 81b’’ дополнительно содержит:
- электрический двигатель 82’’, имеющий выходной элемент 83, вращаемый вокруг оси B и на котором установлен червячный винт 65; и
- диск 66’’, имеющий спиральные зубья 67’’ шестерни, сцепляющиеся с червячным винтом 65, и прикрепленный к связанному водилу 103a, 103b планетарных шестерен и кольцевой шестерне 96c, 96d.
Функционирование винта 3’’ полностью аналогично функционированию винта 3 и описано только в отношении того, что отличается от функционирования винта 3.
В частности, колонка 6 приводит валы 98a, 98b во вращение и в связи с этим массы 21a, 21b с помощью соответственных ступеней 90a, 90b. Колонка 6 также приводит валы 98c, 98d во вращение и в связи с этим массы 20a, 20b с помощью соответственных ступеней 90c, 90d.
Более подробно, ступени 90c, 90d имеют такой размер, что массы 20a, 20b вращаются вокруг оси А с угловыми скоростями (N-1)*Ω и таким же направлением, что и направление вращения колонки 6. Ступени 90c, 90d имеют такой размер, что массы 21a, 21b вращаются вокруг оси А с угловыми скоростями (N+1)*Ω и в направлении, противоположном направлению вращения колонки 6.
В состоянии, когда исполнительные механизмы 80a’’, 80b’’, 81a’’, 81b’’ деактивированы, водила 103a, 103b планетарных шестерен и кольцевые шестерни 96c, 96d остаются выполненными под углом за одно целое с кожухом 120 и в связи с этим под углом неподвижны в отношении оси А.
В этих условиях угол между массами 20a, 20b; 21a, 21b остается постоянным.
Если блок 86 управления обнаруживает необходимость изменения фаз или амплитуд первой и второй результирующих сил, один или более исполнительных механизмов 80a’’, 80b’’, 81a’’, 81b’’ активируются, вызывая вращение на заранее определенный угол связанного одного или более червячных винтов 65 вокруг оси B и связанного одного или более дисков 66’’ вокруг оси A, прикрепленных к связанному водилу 103a, 103b планетарных шестерен или кольцевой шестерне 96c, 96d. Это вращение передается связанной одной или более солнечных шестерен 97a, 97b, 97c, 97d и, в свою очередь, связанной одной или более масс 20a, 20b, 21а, 21b.
Вращение водила 103a, 103b планетарных шестерен и/или кольцевой шестерни 96c, 96d вокруг оси A обеспечивается вкладышами 121a, 121b, 121c, 121d, радиально расположенными между кожухом 120 и водилами 103a, 103b планетарных шестерен и/или кольцевой шестерней 96c, 96d.
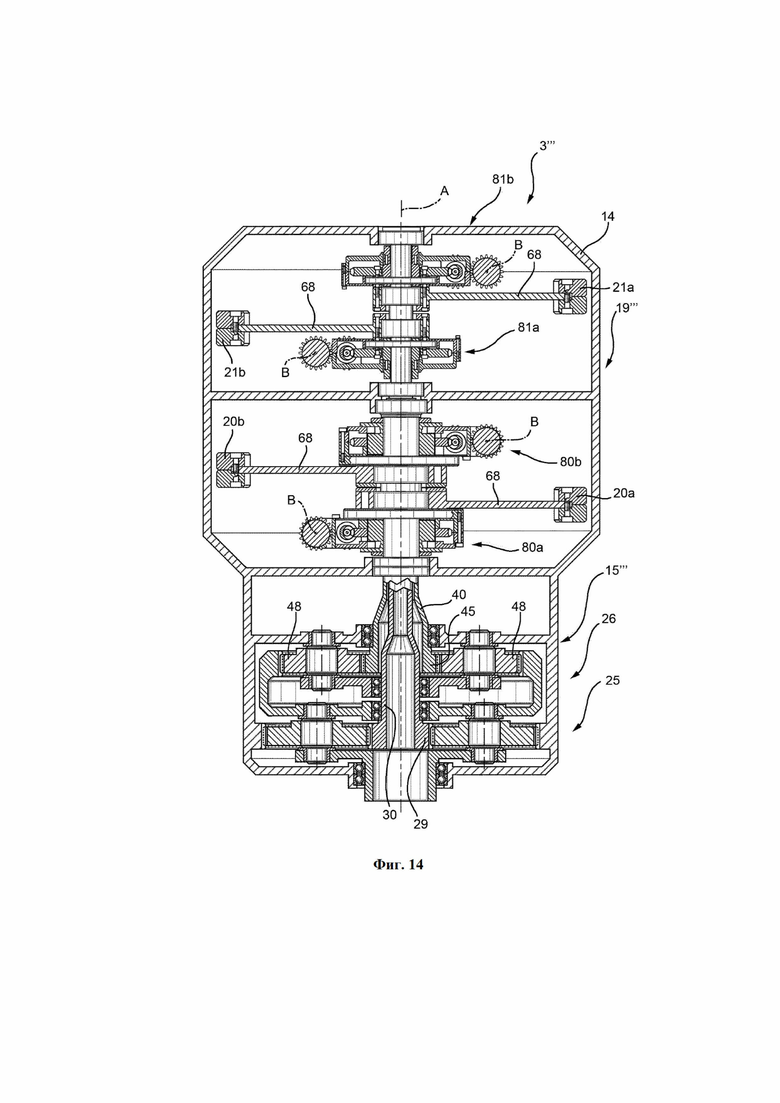
Со ссылкой на Фигуру 14 ссылочная позиция 3’’’ обозначает винт согласно четвертому варианту выполнения настоящего изобретения.
Винт 3’’’ аналогичен винту 3 и будет описан ниже только в отношении того, что отличает его от последнего; одинаковые или эквивалентные части винтов 3, 3’’ будут обозначены там, где это возможно, одинаковыми ссылочными позициями.
В частности, винт 3’’’ отличается от винта 3 тем, что весь блок 19’’’ передачи, т.е. обе ступени, размещены внутри части 14 конвейера 10 потока.
Функционирование винта 3’’’ идентично функционированию винта 3 и в связи с этим не описано.
Из исследования характеристик винта 3, 3’, 3’’, 3’’’ согласно настоящему изобретению очевидны преимущества, которые могут быть достигнуты с ним.
В частности, массы 20a, 20b; 21a, 21b приводятся во вращение колонкой 6 с помощью блока 19, 19’, 19’’, 19’’’ передачи.
Таким образом, возможно достигать «активного» демпфирования вибраций колонки 6 в плоскости, перпендикулярной оси А, эксплуатируя вращение колонки 6 и используя электрические двигатели 82, 82’’ только для регулирования амплитуды и фазы первой и второй результирующих сил, генерируемых соответственными массами 20a, 20b; 21a, 21b. Из этого следует, что возможно достигать преимущества, типичные для «активных» демпферов, со значительным уменьшением затрат, объема и веса.
За счет того, что блок 19, 19’, 19’’, 19’’’ передачи содержит эпициклические передачи, функционально расположенные между колонкой 6 и массами 20a, 20b; 21a, 21b, возможно управлять скоростью вращения масс 20a, 20b; 21a, 21b с высокой точностью и воспроизводимостью. Следовательно, демпфирующее действие масс 20a, 20b; 21a, 21b также является особенно точным и воспроизводимым.
Исполнительные механизмы 80a, 80b, 81a, 81b; 80a’’, 80b’’, 81a’’, 81b’’ позволяют управлять фазой и амплитудой первой и второй результирующих сил в широком диапазоне рабочих условий лопастей 9.
Соединение между каждым червячным винтом 65 и зубьями 67 шестерни связанного диска 66, 66’’ является необратимым. Более подробно, вращение каждого червячного винта 65 вокруг оси B вызывает вращение связанного диска 66, 66’’ и, следовательно, связанного вала 30, 40 и связанных масс 20a, 20b; 21a, 21b вокруг оси A. И наоборот, любое вращение диска 66 вокруг оси A не вызывает вращения связанного червячного винта 65 вокруг оси B. В дополнение, диск 66, 66’’ установлен таким образом, чтобы вращаться вокруг оси А в отношении колонки 6.
В связи с этим, когда электрические двигатели 82, 82’’ деактивированы, связанные червячные винты 65 под углом неподвижны в отношении оси B и не могут быть приведены во вращение инерцией дисков 66. В этой ситуации червячные винты 65 и связанные диски 66, 66’’ ведут себя как жестко соединенные части и приводятся во вращение валом 30 (40) с соответственными угловыми скоростями (N-1)*Ω ((N+1)*Ω).
И наоборот, когда электрические двигатели 82, 82’’ активированы, вращение связанных червячных винтов 65 вызывает вращение соответствующих дисков 66, 66’’ и в связи с этим соответствующих масс 20a, 20b; 21a, 21b в отношении колонки 6 и вокруг оси A на углы, необходимые для достижения желаемых значений амплитуды и фазы для первой и второй результирующих сил.
Ролики 22’, образующие массы 20a, 20b; 21a, 21b винта 3’, являются радиально подвижными в отношении связанных рычагов 68 и радиально скользят по направляющим 23’. Таким образом, первая и вторая результирующие силы высвобождаются на части 14 конвейера 10 потока и передаются от последнего на колонку 6.
Электрические двигатели 82, 82’’ исполнительных механизмов 80a’’, 80b’’, 81a’’, 81a’’ винта 3’’ под углом неподвижны в отношении оси А. Следовательно, отсутствует необходимость установки какого-либо скользящего кольца для электрического питания этих электрических двигателей 82, 82’’ с очевидным упрощением производства и работ по техническому обслуживанию для винта 3’’.
Винт 3, 3’, 3’’, 3’’’ содержит две пары исполнительных механизмов 80a, 80b, 81a, 81b; 80a’’, 80b’’, 81a’’, 81a’’. Следовательно, в случае выхода из строя одного из электрических двигателей 82, соединенных с одной из масс 20a, 20b; 21a, 21b, возможно сохранять функцию демпфирования вибраций, просто эксплуатируя электрический двигатель 82, связанный с другой из масс 20a, 20b; 21a, 21b, и своевременно изменяя его угловое положение вокруг оси A.
Винт 3’’’ имеет весь блок 19’’’ передачи, размещенный внутри части 14 конвейера 10 потока, оставляя колонку 6 свободной и упрощая сборку.
Наконец, также ясно, что могут быть выполнены модификации и отличия, относящиеся к винту 3, 3’, 3’’, 3’’’, описанному и проиллюстрированному здесь без отклонения от объема, определенного формулой изобретения.
В частности, винт 3, 3’, 3’’, 3’’’ может быть использован в конвертоплане вместо вертолета 1.
Более того, вместо масс 20a, 20b; 21a, 21b винт 3, 3’, 3’’, 3’’’ мог бы содержать только две массы, установленные на соответственных пантографах, выполненных с возможностью регулировки расстояния между этими массами и осью А и связи с этим управления амплитудой и фазой результирующей демпфирующей силы, генерируемой на колонке 6.
Наконец, вместо масс 20a, 20b; 21a, 21b винт 3, 3’, 3’’, 3’’’ мог бы содержать только две массы, установленные с возможностью скольжения на соответственных рычагах, и пару направляющих со спиральным профилем в контакте с соответственными массами. В этом решении рычаги приводятся во вращение вокруг оси A для регулировки фазы результирующей демпфирующей силы, генерируемой на колонке 6, и направляющие также приводятся во вращение для регулировки амплитуды этой результирующей демпфирующей силы.
Наконец, винт согласно настоящему изобретению мог бы представлять собой хвостовой винт 4 вертолета 1 вместо несущего винта 3, 3’, 3’’, 3’’’.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИЙ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2780246C2 |
| Складывающийся рекламный стенд в сборе | 2017 |
|
RU2735010C2 |
| ИНДУКТОРНОЕ СИНХРОННОЕ УСТРОЙСТВО | 2005 |
|
RU2361350C2 |
| НЕСУЩИЙ ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО ЗАВИСАТЬ В ВОЗДУХЕ, И СПОСОБ СДЕРЖИВАНИЯ ВИБРАЦИЙ, ПЕРЕДАВАЕМЫХ НА ВАЛ НЕСУЩЕГО ВИНТА ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО ЗАВИСАТЬ В ВОЗДУХЕ | 2018 |
|
RU2764332C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2587368C2 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИИ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2777706C2 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2799170C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2019 |
|
RU2785230C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2683893C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРОВ | 2015 |
|
RU2689637C2 |







Изобретение относится к области авиации, в частности к конструкциям несущих винтов летательных аппаратов. Винт (3, 3’, 3’’, 3’’’) для летательного аппарата содержит втулку (5), вращаемую вокруг оси (A) с группой лопастей (9), колонку (6), соединяемую с приводным элементом летательного аппарата (1) и соединенную с втулкой (5) для приведения втулки (5) во вращение вокруг оси (A) и демпфирующие средства (15; 20a, 20b; 21a, 21b) для демпфирования передачи вибраций на колонку (6) в плоскости, перпендикулярной оси (A). Демпфирующие средства (15; 20a, 20b; 21a, 21b) содержат по меньшей мере первую массу (20a, 20b) и вторую массу (21а, 21b), которые могут эксцентрично вращаться вокруг оси (A) с первой и второй скоростью вращения ((N-1)*Ω; -(N+1)*Ω) соответственно. Первая масса (20a, 20b) и вторая масса (21а, 21b) функционально соединены с колонкой (6) для генерации соответственно первой и второй демпфирующей силы на колонке (6), имеющей основной компонент в направлении, радиальном к оси (A). Винт (3, 3’, 3’’, 3’’’) содержит блок (19, 19’, 19’’, 19’’’) передачи, который расположен между колонкой (6) и первой и второй массами (20a, 20b; 21a, 21b) так, чтобы приводить первую и вторую массы (20a, 20b; 21a, 21b) во вращение. Обеспечивается ограничение передачи вибрации от колонки на фюзеляж. 4 н. и 11 з.п. ф-лы, 14 ил.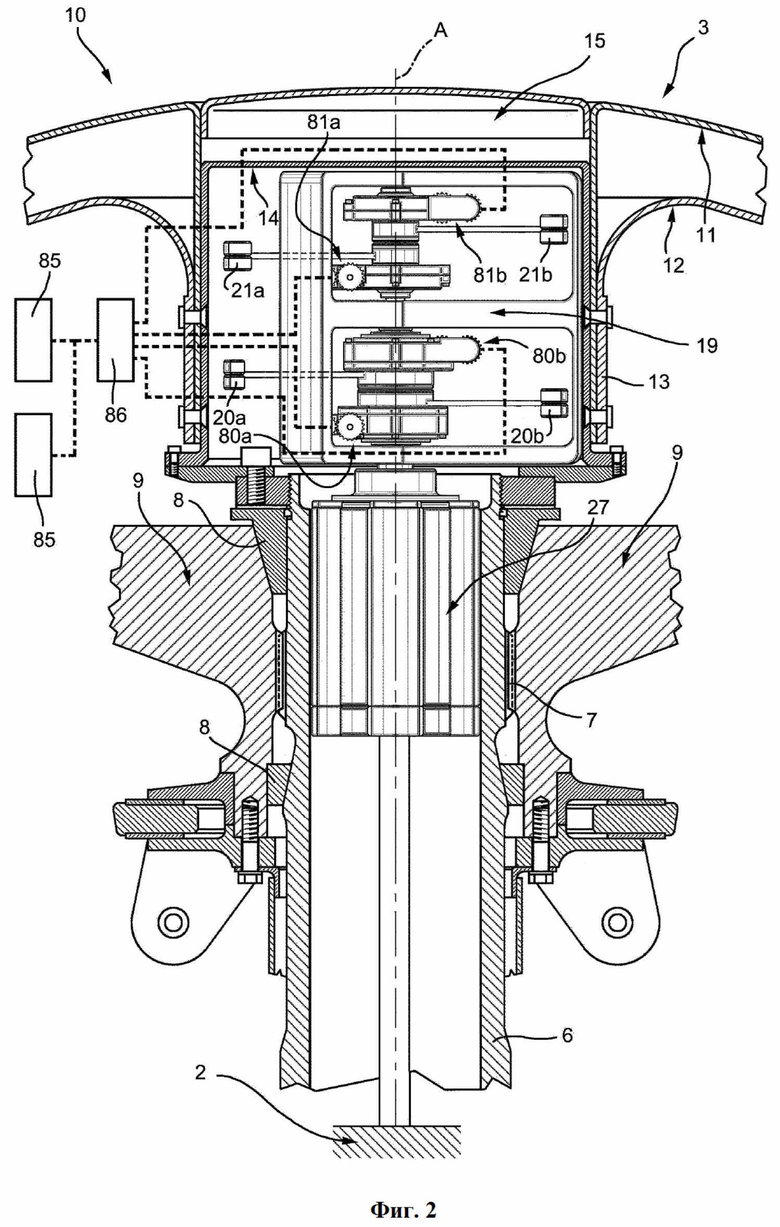
1. Винт (3, 3’, 3’’’) способного к зависанию летательного аппарата (1), включающий:
- втулку (5), выполненную с возможностью вращения вокруг первой оси (A) и, содержащую группу лопастей (9);
- колонку (6), выполненную с возможностью соединения с приводным элементом указанного летательного аппарата (1) и функционально соединенную с указанной втулкой (5) выполненную с возможностью приведения втулки (5) во вращение вокруг указанной первой оси (A);
демпфирующие средства (15; 20a, 20b; 21a, 21b) для демпфирования передачи вибраций на указанную колонку (6) в плоскости, перпендикулярной указанной первой оси (A);
при этом указанные демпфирующие средства (15; 20a, 20b; 21a, 21b), содержат по меньшей мере одну первую массу (20a, 20b) и по меньшей мере одну вторую массу (21а, 21b), которые выполнены с возможностью эксцентричного вращения вокруг указанной первой оси (A) соответственно с первой и второй скоростью вращения ((N-1)·Ω; -(N+1)·Ω) в отношении указанной колонки (6);
при этом указанные первая масса (20a, 20b) и вторая масса (21а, 21b) функционально соединены с указанной колонкой (6) выполненной с возможностью генерации соответственно первой и второй демпфирующей силы на указанной колонке (6), имеющей основной компонент в направлении, радиальном к указанной первой оси (A);
при этом указанный винт (3, 3’, 3’’’) дополнительно содержит блок (19, 19’, 19’’’) передачи, который функционально расположен между указанной колонкой (6) и указанными первой и второй массами (20a, 20b; 21a, 21b) выполнен с возможностью приведения указанных первой и второй массы (20a, 20b; 21a, 21b) во вращение в направлениях, противоположных друг другу;
отличающийся тем, что указанные первая и вторая массы (20a, 20b; 21a, 21b) выполнены с возможностью генерации при использовании результирующей силы с синусоидальной траекторией на указанной колонке (6);
при этом указанный винт (3, 3’, 3’’’) дополнительно содержит исполнительные средства (80a, 80b, 81a, 81b), выборочно выполненные с возможностью изменения амплитуды и фазы указанной результирующей силы;
при этом указанные исполнительные средства (80a, 80b, 81a, 81b) содержат:
- приводной элемент (82);
- опорный элемент (66), функционально соединенный с одной из указанных первой и второй масс (20a, 20b; 21a, 21b) и выполненный с возможностью вращения в отношении указанной колонки (6); и
- дополнительный блок (65, 67) передачи, который выполнен с возможностью приведения в движение указанным приводным элементом (82) и при использовании указанного опорного элемента (66);
при этом указанный дополнительный блок (65, 67) передачи выполнен с возможностью необратимо передавать движение только от выходного элемента (83) указанного приводного элемента (82) указанному опорному элементу (66) и предотвращать передачу движения в противоположном направлении от указанного опорного элемента (66) указанному приводному элементу (82);
при этом указанный дополнительный блок (65, 67) передачи содержит червячный винт (65), который выполнен с возможностью приведения в действие указанным приводным элементом (82), и спиральные зубья (67) шестерни, удерживаемые указанным опорным элементом (66) и необратимо сцепляющиеся с указанным червячным винтом (65);
при этом указанный винт (3, 3’, 3’’’) содержит для каждой указанной первой массы (20a, 20b) и второй массы (21а, 21b) связанный кожух (62, 63);
при этом указанный связанный кожух (62, 63) вращается за одно целое с указанной колонкой (6) и с указанным приводным элементом (82) вокруг указанной первой оси (A) и по меньшей мере частично вмещает указанный дополнительный блок (66, 67) передачи;
при этом связанный выходной элемент (83) вращается в отношении указанного кожуха (62, 63) вокруг второй оси (B), поперечной указанной первой оси (A);
при этом указанный опорный элемент (66) установлен под углом за одно целое с указанным кожухом (62, 63) вокруг указанной первой оси (A).
2. Винт по п. 1, отличающийся тем, что указанный блок (19; 19’; 19’’’) передачи содержит первый выходной элемент (30, 68; 98c, 98d, 68), соединенный с указанной первой массой (20a, 20b), и по меньшей мере второй выходной элемент (40, 68; 98a, 98b, 68), соединенный с указанной второй массой (21a, 21b);
при этом указанный блок (19; 19’) передачи выполнен с возможностью приведения указанного первого выходного элемента (30, 68; 98c, 98d, 68) во вращение с третьей угловой скоростью, связанной с указанной первой угловой скоростью ((N-1)·Ω) и в первом направлении, и указанный второй выходной элемент (40, 68; 98a, 98b, 68) с четвертой угловой скоростью, связанной с указанной второй угловой скоростью (-(N+1)·Ω) и во втором направлении, противоположном указанному первому направлению.
3. Винт по п. 2, отличающийся тем, что указанный блок (19, 19’, 19’’’) передачи содержит:
- первую ступень (25), функционально расположенную между указанной колонкой (6) и указанной по меньшей мере одной первой массой (20a, 20b); и
- вторую ступень (26), функционально расположенную между указанной первой ступенью (25) и по меньшей мере одной указанной второй массой (21а; 21b).
4. Винт по п. 3, отличающийся тем, что указанная первая и вторая ступени (25, 26) содержат первую и вторую эпициклическую передачу соответственно;
при этом первая и вторая солнечная шестерня (29, 45) указанных первой и второй эпициклических передач, образованных указанными первой и второй ступенями (25, 26), выполнены под углом за одно целое вокруг указанной первой оси (A) с указанной первой и второй массами (20a, 20b; 21a, 21b) соответственно;
при этом указанная первая солнечная шестерня (29) дополнительно выполнена под углом за одно целое со второй кольцевой шестерней (41) указанной второй эпициклической передачи, образованной указанной второй ступенью (26);
при этом указанные первая и вторая эпициклические передачи, образованные указанными первой и второй ступенями (25, 26), дополнительно содержат:
- соответственные первую и вторую планетарные шестерни (33, 35; 46, 48);
- общее водило (28) планетарных шестерен, вокруг которого вращаются указанные первая и вторая планетарные шестерни (33, 37; 46, 48) и которое соединено с фюзеляжем (2) указанного летательного аппарата (1);
при этом указанные первые планетарные шестерни (33, 35, 37) сцепляются с указанной первой солнечной шестерней (29) и с первой кольцевой шестерней (27);
при этом указанные вторые планетарные шестерни (46, 48) сцепляются с указанной второй солнечной шестерней (45) и с указанной второй кольцевой шестерней (41).
5. Винт по любому из предыдущих пунктов, отличающийся тем, что указанная первая скорость вращения равна (N-1)·Ω, а указанная вторая скорость вращения равна (N+1)·Ω, где N - число указанных лопастей (9), а Ω - скорость вращения указанной колонки (6) в эталонной системе, выполненной за одно целое с указанным фюзеляжем (2);
при этом указанная первая масса (20a, 20b) является вращаемой в том же направлении, что и указанная колонка (6), и в отношении указанной колонки (6) с указанной первой угловой скоростью ((N-1)·Ω);
при этом указанная вторая масса (21а, 21b) является вращаемой в направлении, противоположном указанной колонке (6), и в отношении указанной колонки (6) с указанной второй угловой скоростью ((N+1)·Ω).
6. Винт по любому из вышеупомянутых пунктов, отличающийся тем, что указанные исполнительные средства (80a, 80b, 81a, 81b) выборочно выполнены с возможностью изменения первого угла между указанными первыми массами (20a, 20b) и/или второго угла между указанной второй массой (21а, 21b) в отношении указанной первой оси (A).
7. Винт по любому из предыдущих пунктов, отличающийся тем, что указанные первая и вторая массы (20a, 20b; 21a, 21b) являются подвижными вдоль направления, радиального к указанной первой оси (A), в отношении указанной колонки (6) и контактируют с соответственными направляющими (23’), вращающимися за одно целое с указанной колонкой (6) вокруг указанной первой оси (A).
8. Винт по любому из предыдущих пунктов, отличающийся тем, что он включает конвейер (10) потока, соединенный с указанной втулкой (5) и выполненный с возможностью направления потока воздуха, генерируемого при использовании в результате вращения указанных лопастей (9), согласно заранее определенной траектории;
при этом указанная первая и вторая массы (20a, 20b; 21a, 21b) размещены внутри указанного конвейера (10) потока;
при этом указанный винт (3, 3’), в которых указанные первая и вторая эпициклические передачи, образующие указанные первую и вторую ступени (25, 26; 90a, 90b, 90c, 90d), размещены внутри указанной колонки (6);
или весь указанный блок (19’’’) передачи размещен внутри указанного конвейера (10) потока.
9. Способный к зависанию летательный аппарат (1), отличающийся тем, что он включает винт (3, 3’, 3’’’) по любому из предыдущих пунктов.
10. Винт (3’’) способного к зависанию летательного аппарата (1), включающий:
- втулку (5), вращаемую вокруг первой оси (A) и содержащую группу лопастей (9);
- колонку (6), соединяемую с приводным элементом указанного летательного аппарата (1) и функционально соединенную с указанной втулкой (5) для приведения втулки (5) во вращение вокруг указанной первой оси (A);
демпфирующие средства (15; 20a, 20b; 21a, 21b) для демпфирования передачи вибраций на указанную колонку (6) в плоскости, перпендикулярной указанной первой оси (A);
при этом указанные демпфирующие средства (15; 20a, 20b; 21a, 21b), содержат по меньшей мере одну первую массу (20a, 20b) и по меньшей мере одну вторую массу (21а, 21b), которые выполнены с возможностью эксцентричного вращения вокруг указанной первой оси (A) соответственно с первой и второй скоростью вращения ((N-1)·Ω; -(N+1)·Ω) в отношении указанной колонки (6);
при этом указанные первая масса (20a, 20b) и вторая масса (21а, 21b) функционально соединены с указанной колонкой (6) для генерации соответственно первой и второй демпфирующей силы на указанной колонке (6), имеющей основной компонент в направлении, радиальном к указанной первой оси (A);
при этом указанный винт (3’’) дополнительно содержит блок (19’’) передачи, который функционально расположен между указанной колонкой (6) и указанными первой и второй массами (20a, 20b; 21a, 21b) выполнен с возможностью приводить указанные первую и вторую массы (20a, 20b; 21a, 21b) во вращение в направлениях, противоположных друг другу;
при этом указанный блок (19’’) передачи содержит:
- кожух (120), неподвижный в отношении указанного фюзеляжа (2);
- первую ступень (90a, 90b), функционально расположенную между указанной колонкой (6) и указанной второй массой (21a, 21b); и
- вторую ступень (90c, 90d), функционально расположенную между указанный колонкой (6) и указанной первой массой (20a, 20b);
при этом указанные первая ступень (90a, 90b) и вторая ступень (91a, 91b) содержат первую и вторую эпициклическую передачу соответственно;
при этом указанные первая и вторая эпициклические передачи имеют третью и четвертую солнечную шестерню (97a, 97b; 97c, 97d) соответственно, функционально соединенные с соответственными указанными второй и первой массами (21а, 21b; 20a, 20b) и определяющие первое и второе выходное движение соответственно;
при этом указанная первая эпициклическая передача дополнительно содержит:
- третью кольцевую шестерню (96a; 96b), определяющую первое входное движение и вращающуюся за одно целое с указанной колонкой (6);
- группу третьих планетарных шестерен (99a, 99b), сцепляющихся с указанной третьей кольцевой шестерней (96a, 96b) и указанной третьей солнечной шестерней (97a, 97b); и
- третье водило (103a, 103b) планетарных шестерен, в отношении которого указанные третьи планетарные шестерни (99a, 99b) установлены с возможностью вращения;
при этом указанная вторая эпициклическая передача дополнительно содержит:
- четвертую кольцевую шестерню (96c, 96d);
- группу четвертых планетарных шестерен (99c, 99d), сцепляющихся с указанной четвертой кольцевой шестерней (96c; 96d) и указанной четвертой солнечной шестерней (97c, 97d); и
- четвертое водило (103c) планетарных шестерен, определяющее второе входное движение и вращающееся за одно целое с указанной колонкой (6) и в отношении которого указанные четвертые планетарные шестерни (99c, 99d) установлены с возможностью вращения;
при этом указанное третье водило (103a, 103b) планетарных шестерен и указанная четвертая кольцевая шестерня (96c; 96d) вступают в скользящий контакт с указанным кожухом (120);
отличающийся тем, что указанные первая и вторая массы (20a, 20b; 21a, 21b) генерируют при использовании результирующую силу с синусоидальной траекторией на указанной колонке (6);
при этом указанный винт (3’’) дополнительно содержит исполнительные средства (80a, 80b, 81a, 81b), выборочно выполненные с возможностью изменения амплитуды и фазы указанной результирующей силы;
при этом указанные исполнительные средства (80a, 80b, 81a, 81b) содержат:
- приводной элемент (82’’);
- опорный элемент (66’’), функционально соединенный с одной из указанных первой и второй масс (20a, 20b; 21a, 21b) и вращаемый в отношении указанной колонки (6); и
- дополнительный блок (65, 67) передачи, который выполнен с возможностью приведения в движение указанным приводным элементом (82’’) и при использовании указанного опорного элемента (66’’);
при этом указанный дополнительный блок (65, 67) передачи выполнен с возможностью необратимо передавать движение только от выходного элемента (83) указанного приводного элемента (82’’) указанному опорному элементу (66’’) и предотвращать передачу движения в противоположном направлении от указанного опорного элемента (66’’) указанному приводному элементу (82’’);
при этом указанный дополнительный блок (65, 67) передачи содержит червячный винт (65), который выполнен с возможностью приведения в действие указанным приводным элементом (82), и спиральные зубья (67) шестерни, удерживаемые указанным опорным элементом (66) и необратимо сцепляющиеся с указанным червячным винтом (65);
при этом указанный винт (3’’) дополнительно содержит:
- первый указанный приводной элемент (82’’), выполненный с возможностью вызывать вращение, согласно заранее определенному углу, указанной второй массы (21а, 21b) вокруг указанной первой оси (A), и первый указанный опорный элемент (66’’), функционально соединенный с указанным первым приводным элементом (82’’) посредством первого указанного дополнительного блока (66’’, 67) передачи; при этом указанный первый опорный элемент (66’’) удерживается указанным третьим водилом (103a, 103b) планетарных шестерен; при этом работа указанного первого приводного элемента (82’’) вызывает относительное движение указанного третьего водила (103a, 103b) планетарных шестерен в отношении указанного кожуха (120) и вокруг указанной первой оси (A); и/или
- второй указанный приводной элемент (82’’), выполненный с возможностью вызывать вращение, согласно заранее определенному углу, указанной первой массы (20a, 20b) вокруг указанной первой оси (A), и второй указанный опорный элемент (66’’), функционально соединенный с указанным вторым приводным элементом (82’’) посредством второго указанного дополнительного блока (66’’, 67) передачи; при этом указанный второй опорный элемент (66’’) удерживается указанной четвертой кольцевой шестерней (96c, 96d); при этом работа указанного второго приводного элемента (82’’) вызывает при использовании относительное движение указанной четвертой кольцевой шестерни (96c, 96d) в отношении указанного кожуха (120) и вокруг указанной первой оси (A).
11. Винт по п. 10, отличающийся тем, что указанный блок (19’’) передачи содержит первый выходной элемент (30, 68; 98c, 98d, 68), соединенный с указанной первой массой (20a, 20b), и по меньшей мере второй выходной элемент (40, 68; 98a, 98b, 68), соединенный с указанной второй массой (21а, 21b);
при этом указанный блок (19’’) передачи выполнен с возможностью приведения указанного первого выходного элемента (30, 68; 98c, 98d, 68) во вращение с третьей угловой скоростью, связанной с указанной первой угловой скоростью ((N-1)·Ω) и в первом направлении, и указанный второй выходной элемент (40, 68; 98a, 98b, 68) с четвертой угловой скоростью, связанной с указанной второй угловой скоростью (-(N+1)·Ω) и во втором направлении, противоположном указанному первому направлению.
12. Винт по п. 10 или 11, отличающийся тем, что указанная первая скорость вращения равна (N-1)·Ω, а указанная вторая скорость вращения равна (N+1)·Ω, где N - число указанных лопастей (9), а Ω - скорость вращения указанной колонки (6) в эталонной системе, выполненной за одно целое с указанным фюзеляжем (2);
при этом указанная первая масса (20a, 20b) является вращаемой в том же направлении, что и указанная колонка (6), и в отношении указанной колонки (6) с указанной первой угловой скоростью ((N-1)·Ω);
при этом указанная вторая масса (21а, 21b) является вращаемой в направлении, противоположном указанной колонке (6), и в отношении указанной колонки (6) с указанной второй угловой скоростью ((N+1)·Ω).
13. Винт по любому из пп. 10, 12, отличающийся тем, что указанные исполнительные средства (80a’’, 80b’’, 81a’’, 81b’’) выборочно выполнены с возможностью изменения первого угла между указанными первыми массами (20a, 20b) и/или второго угла между указанной второй массой (21а, 21b) в отношении указанной первой оси (A).
14. Винт по любому из пп. 10-13, отличающийся тем, что он включает конвейер (10) потока, соединенный с указанной втулкой (5) и выполненный с возможностью направления потока воздуха, генерируемого при использовании в результате вращения указанных лопастей (9), согласно заранее определенной траектории;
при этом указанные первая и вторая массы (20a, 20b; 21a, 21b) размещены внутри указанного конвейера (10) потока;
при этом указанный винт (3’’) отличается тем, что указанные первая и вторая эпициклические передачи, образующие указанные первую и вторую ступени (25, 26; 90a, 90b, 90c, 90d), размещены внутри указанной колонки (6).
15. Способный к зависанию летательный аппарат (1), отличающийся тем, что он включает винт (3’’) по любому из пп. 10-14.
| US 20140360830 A1, 11.12.2014 | |||
| US 20120181377 A1, 19.07.2012 | |||
| US 20060197487 A1, 07.09.2006 | |||
| WO 2015031768 A1, 05.03.2015 | |||
| Устройство для измерения давления | 1983 |
|
SU1120193A1 |
| ВИНТ ВЕРТОЛЕТА, СОДЕРЖАЩИЙ ГАСИТЕЛЬ КОЛЕБАНИЙ | 2008 |
|
RU2475415C2 |

