ОСНОВНАЯ ТЕХНИЧЕСКАЯ ОБЛАСТЬ И ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к области контроля тяги газотурбинного двигателя, в частности турбореактивного двигателя для приведения в движение летательного аппарата.
Обычно летательный аппарат приводится в движение, с помощью, по меньшей мере, двух турбореактивных двигателей, установленных соответственно на двух крыльях самолета. Для управления тягой турбореактивных двигателей пилот самолета обычно задействует рычаг управления газом для каждого турбореактивного двигателя.
Тягу каждого турбореактивного двигателя обычно контролируют, чтобы гарантировать, что фактическая тяга реактивного двигателя соответствует заданному значению тяги, выбранному пилотом самолета при помощи рычага управления газом. Фактическая тяга турбореактивного двигателя может быть измерена только косвенным образом для турбореактивного двигателя. На практике, для двухвального турбореактивного двигателя, включающего вал низкого давления и вал высокого давления, следят за скоростью вращения вала низкого давления, также называемою «режим N1», для определения тяги турбореактивного двигателя.
В настоящей заявке, допуская вольность речи, термин "измерение тяги" используется для обозначения представляющего параметра тяги, например, режима вращения N1 или параметра EPR от "Степень повышения Давления в Двигателе".
Непосредственное решение для измерения нарушения тяги реактивного двигателя состоит в том, чтобы сравнить, в каждый момент, режим N1CONS, соответствующий заданному значению тяги, определенному рычагом управления газом, с фактическим режимом N1EFF, измеренным в режиме реального времени на турбореактивном двигателе с помощью бортовых датчиков.
На практике, когда пилот контролирует увеличение или уменьшение тяги турбореактивного двигателя, турбореактивный двигатель реагирует с задержкой, которая может быть порядка нескольких секунд. Во время этого переходного этапа, в связи с переменной задержкой, любое обнаружение нарушения тяги невозможно, что задерживает активацию систем безопасности (системы UHT от "Неконтролируемая Высокая Тяга" и ATTCS от "Автоматическая система управления взлетной тягой") и представляет собой недостаток.
ОБЩЕЕ ПРЕДСТАВЛЕНИЕ ИЗОБРЕТЕНИЯ
Чтобы устранить, по крайней мере, некоторые из этих недостатков, настоящее изобретение относится к способу контроля нарушения тяги турбореактивного двигателя летательного аппарата с помощью вычислителя, размещенного на указанном летательном аппарате, при изменении заданного значения тяги указанного турбореактивного двигателя, фактическая тяга турбореактивного двигателя изменяется во время переходной фазы для достижения желаемого заданного значения тяги,
способ содержит:
- этап обработки заданного значения тяги с помощью функции фильтрации и модели переходной фазы таким образом, чтобы получить смоделированную тягу;
- этап измерения фактической тяги;
- этап сравнения указанной смоделированной тяги с указанной фактической тягой, для определения отклонения тяги;
- этап сравнения указанного отклонения тяги с порогом сигнализации; и
- этап передачи сигнала тревоги в случае превышения указанного порога сигнализации;
способ, в котором
- при заданной итерации смоделированная ранее тяга известна, модель фазы перехода предоставляет постоянную времени на основании смоделированной ранее тяги, функция фильтрации предоставляет смоделированную тягу на основании полученной постоянной времени, смоделированной ранее тяги и заданного значения тяги.
Преимущественно, моделируют именно задержку между фактической тягой и заданным значением тяги для осуществления когерентного сравнения двух значений во время фазы перехода. Таким образом, можно быстро и реактивно обнаружить любое нарушение тяги во время фазы перехода. В частности, если недостаток тяги обнаружен на турбореактивном двигателе, можно исправить это нарушение с помощью другого турбореактивного двигателя, который также находится в своей переходной фазе.
Предпочтительно, фактическая тяга получена косвенным образом, путем измерения режима вращения вращающегося вала турбореактивного двигателя, например вала низкого давления. Само собой разумеется, что также может быть использован параметр EPR от "Степень повышения Давления в Двигателе".
Предпочтительно, при запуске турбореактивного двигателя выполняют инициализацию функции фильтрации. Более предпочтительно, инициализацию функции фильтра осуществляют в зависимости от знака отклонения тяги. Такая инициализация может снизить риск ложных срабатываний при контроле нарушения тяги.
Предпочтительно, во время инициализации ранее смоделированная тяга равна фактической тяге турбореактивного двигателя. Таким образом, получают быструю сходимость модели фазы перехода, с целью получения постоянной времени наиболее соответствующей данной итерации.
Согласно предпочтительному варианту осуществления, функция фильтра является функцией фильтра нижних частот, предпочтительно, передаточной функцией второго порядка для того, чтобы смоделировать соответствующим образом задержку фактической тяги на фазе перехода.
Предпочтительно, турбореактивный двигатель содержит устройство регулирования малого газа, выполненное с возможностью заменять заданное значение, определенное рычагом управления газом, на величину малого газа в зависимости от определенных условий внешней среды турбореактивного двигателя, способ включает в себя для контроля сверхтяги этап измерения, по меньшей мере, одного параметра окружающей среды турбореактивного двигателя, таким образом, чтобы определить, заменено ли заданное значение рычага управления газом на величину малого газа.
Таким образом, способ контроля позволяет косвенным образом детектировать, определено ли заданное значение тяги турбореактивного двигателя с помощью заданного значения рычага управления газом или значением малого газа. Это косвенное детектирования малого газа, не связанное с устройством регулирования малого газа, позволяет повысить надежность контроля, избегая использования обычных методов.
Предпочтительно, способ контроля включает в себя определение смоделированного значения малого газа с помощью модели малого газа, которая связывает смоделированное значение малого газа с одним или несколькими значениями параметров окружающей среды турбореактивного двигателя.
Предпочтительно, модель малого газа связывает смоделированное значение малого газа с давлением окружающей среды турбореактивного двигателя и/или температурой окружающей среды турбореактивного двигателя.
В соответствии с одним аспектом настоящего изобретения, порог сигнализации является параметрируемым порогом, турбореактивный двигатель включает в себя средства контроля состояния, по крайней мере, дополнительного условия турбореактивного двигателя и применяют штрафной параметр указанного порога сигнализации при обнаружении ненормального состояния указанного дополнительного условия. Использование совокупности показателей, относящихся к нарушению тяги, позволяет существенно повысить чувствительность обнаружения. Дополнительные условия могут варьироваться (самогашения факела пламени турбореактивного двигателя, помпаж, ускорение вала высокого давления, изменение производной отклонения тяги и т.д.).
Предпочтительно, применяют штрафной параметр к указанному порогу сигнализации, который является функцией критичности контролируемого дополнительного состояния. Таким образом, если критичное дополнительное условие в ненормальном состоянии, порог сигнализации конфигурирован для срабатывания при малейшем отклонении тяги. Создавая иерархию дополнительных условий, определяют надлежащий порог сигнализации, что ограничивает риск ложных срабатываний при увеличении чувствительности контроля.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет более понятным при прочтении описания, которое следует из приведенного исключительно в качестве примера, и ссылается на прилагаемые чертежи, на которых:
- Фиг. 1 представляет собой схематическую диаграмму способа контроля недостаточности тяги турбореактивного двигателя согласно изобретению;
- Фиг. 2 представляет собой схематическую диаграмму этапа обработки заданного значения тяги в течение осуществления способа, показанного на фиг. 1;
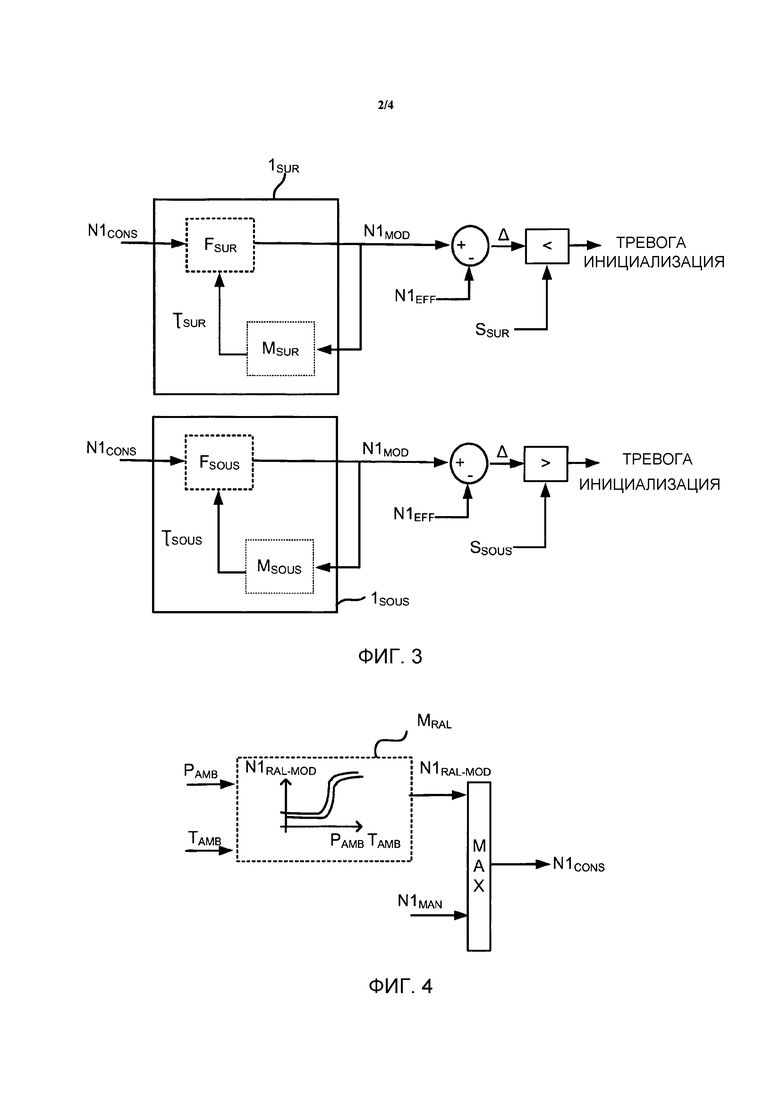
- Фиг. 3 демонстрирует первую диаграмму контроля сверхтяги и вторую диаграмму контроля недостаточности тяги;
- Фиг. 4 представляет собой схематическую диаграмму этапа регулирования малого газа во время контроля сверхтяги;
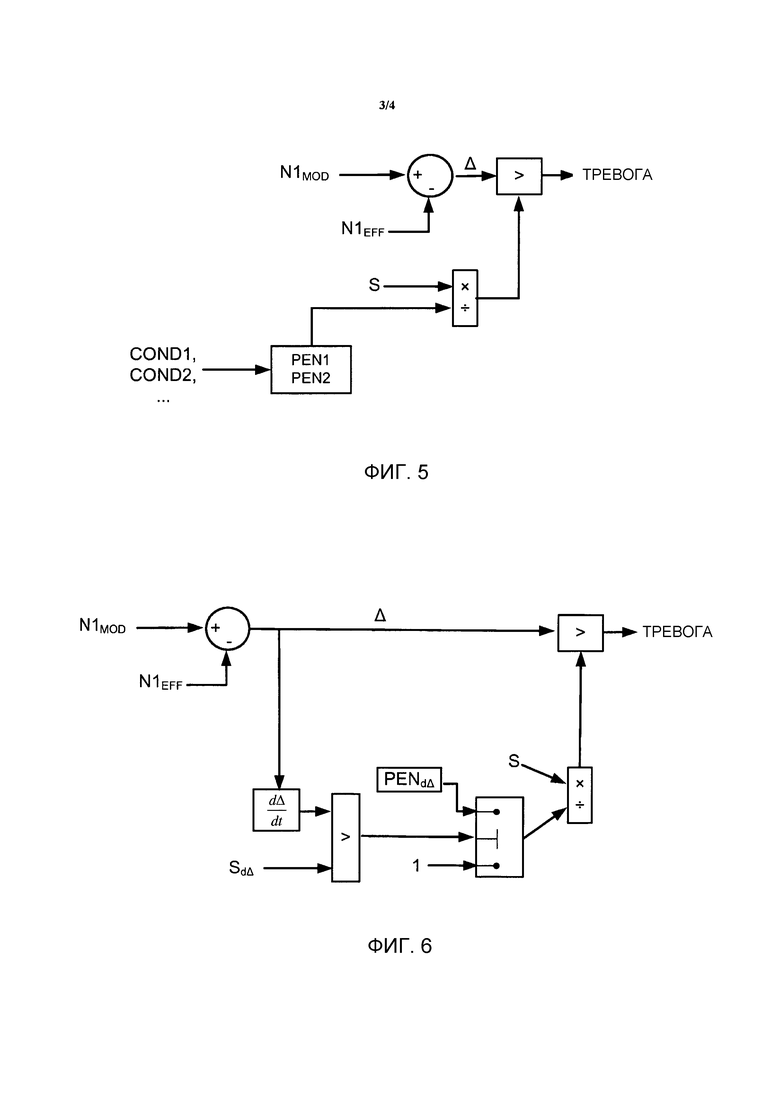
- Фиг. 5 представляет собой общую схематическую диаграмму установки порога сигнализации;
- Фиг. 6 представляет собой схематическую диаграмму установки порога сигнализации в течение контроля скорости изменения отклонения тяги;
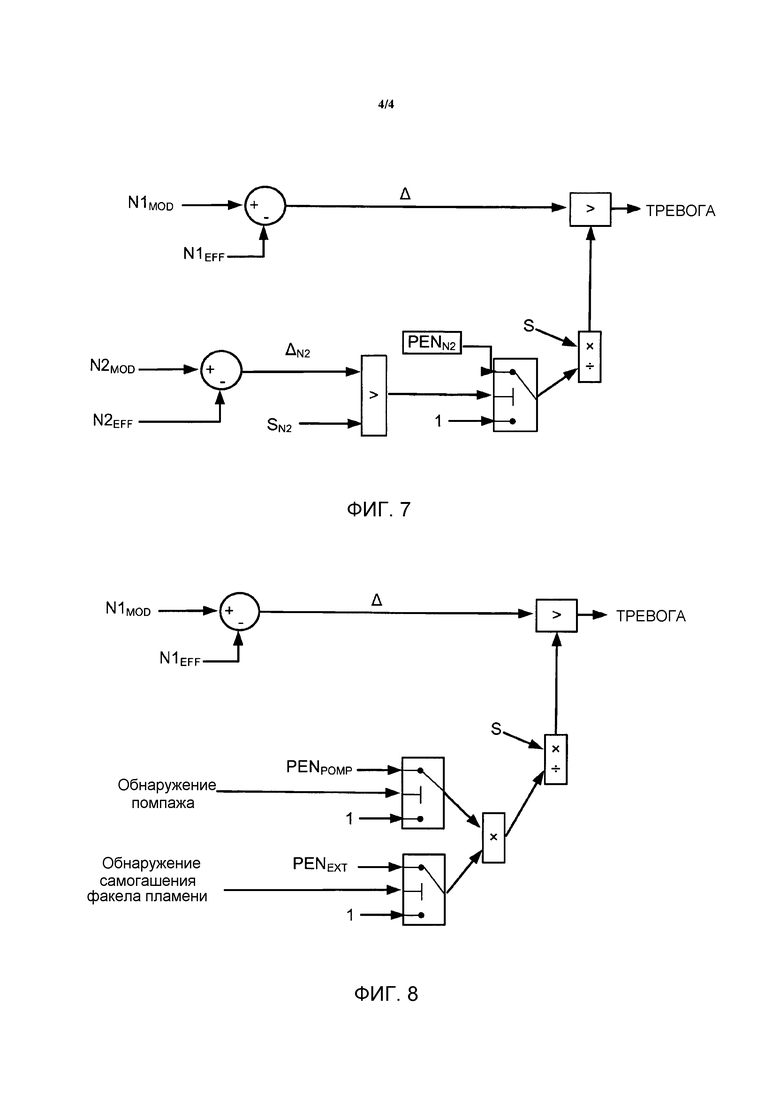
- Фиг. 7 представляет собой схематическую диаграмму установки порога сигнализации в течение контроля скорости вращения вала высокого давления турбореактивного двигателя;
- Фиг. 8 представляет собой схематическую диаграмму установки порога сигнализации посредством обнаружения события помпажа и/или самогашение факела пламени турбореактивного двигателя.
Следует отметить, что чертежи подробно обрисовывают изобретение для осуществления изобретения, указанные чертежи, конечно, могут быть использованы для более точного определения изобретения, если это необходимо.
ОПИСАНИЕ ОДНОГО ИЛИ НЕСКОЛЬКИХ ВАРИАНТОВ РЕАЛИЗАЦИИ И ОСУЩЕСТВЛЕНИЯ
Фиг. 1 представляет собой схематическую диаграмму способа в соответствии с изобретением для контроля нарушения тяги турбореактивного двигателя летательного аппарата с помощью вычислителя, расположенного на борту указанного летательного аппарата, во время изменения заданного значения тяги указанного турбореактивного двигателя.
Изобретение будет представлено для двухвального турбореактивного двигателя, включающего в себя вал низкого давления и вал высокого давления. Для ясности, используем режим вращения вала низкого давления, также называемый "Режим N1", для определения тяги турбореактивного двигателя. Очевидно, что другие параметры турбореактивного двигателя, которые являются функцией тяги, также могут быть использованы, в частности, параметр EPR от "Степень повышения Давления в Двигателе".
Заданное значение тяги N1CONS в данном примере соответствует скорости заданного значения вала низкого давления. Предпочтительно, заданное значение тяги N1CONS задается пилотом летательного аппарата, на котором установлен турбореактивный двигатель, с помощью рычага управления газом.
Предпочтительно, заданное значение тяги N1CONS известно точно и достоверно. Действительно, Заданное значение тяги N1CONS является избыточным, гарантирует, что способ контроля использует исправный вход, другими словами, не поврежденный. Надежность способа контроля в соответствии с настоящим изобретением в таком случае улучшается.
Как указано в преамбуле, эффективная тяга N1EFF турбореактивного двигателя изменяется во время переходной фазы тяги, до достижения желаемой тяги N1CONS. Фактическая тяга N1EFF соответствует, в этом примере, эффективному режиму вала низкого давления. Предпочтительно, фактическая тяга N1EFF измеряется, с запасом, датчиками турбореактивного двигателя и рассматривается как исправный вход.
В соответствии с изобретением, со ссылкой на фиг 1, способ включает в себя:
- этап 1 обработки заданного значения тяги N1CONS, во время переходной фазы тяги, таким образом, чтобы определить смоделированную тягу N1MOD;
- этап измерения фактической тяги N1EFF;
- этап сравнения упомянутой смоделированной тяги N1MOD с указанной фактической тягой N1EFF, с целью определения отклонения Δ тяги;
- этап сравнения указанного отклонения тяги Δ с порогом срабатывания аварийной сигнализации S; и
- этап передачи сигнала ТРЕВОГА в случае превышения указанного порога S.
Способ примечателен тем, что во время этапа 1 обработки, со ссылкой на фиг. 2, обрабатывают заданное значение тяги N1CONS с помощью функции фильтрации F и модели М переходной фазы, чтобы получить смоделированную тягу N1MOD.
Как показано на фиг. 2, этап обработки является итеративным. В данной итерации, предыдущая смоделированная тяга N1MOD(OLD) известна, модель М переходной фазы дает постоянную времени Т на основании предыдущей смоделированной тяги N1MOD(OLD), функция F фильтрации дает смоделированную тягу N1MOD на основании полученной постоянной времени Т, предшествующей смоделированной тяги N1MOD(OLD) и заданного значения тяги N1CONS.
Другими словами, изобретение предлагает преобразовать заданное значение тяги N1CONS в смоделированную тягу N1MOD, которая принимает во внимание переходную фазу тяги указанного турбореактивного двигателя. Таким образом, смоделированная тяга N1MOD и реальная тяга N1EFF коррелируются во время переходной фазы тяги, что позволяет их сравнить соответственно в каждый момент во время переходной фазы. Это позволяет обнаружить любое нарушение тяги (недостаточность тяги или сверхтяга) реактивно. Таким образом, более не требуется ждать, пока тяга стабилизируется, чтобы обнаружить нарушение тяги, как в предшествующем уровне техники.
Как показано на фиг. 2, заданная тяга N1CONS фильтруется функцией F фильтрации нижних частот второго порядка во время этапа 1 обработки. Функция фильтрации F является передаточной функцией, самой по себе известной специалистам в данной области техники, что позволяет воспользоваться смоделированной тягой N1MOD, в зависимости от постоянной времени Т, с тем, чтобы позволить сравнение с фактической тягой N1EFF. Предпочтительно, функция фильтрации F имеет единичное усиление, чтобы в конце переходной фазы смоделированная тяга N1MOD была равна заданному значению тяги N1CONS.
Еще, со ссылкой на фиг. 2, модель М переходной фазы связывает значение смоделированной тяги N1MOD со значением константы времени Т. Модель М переходной фазы обычно получают по результатам опыта на основании измерений, выполненных на таком же типе турбореактивного двигателя. Как показано на фиг. 2, смоделированная тяга N1MOD определенной итерации определяется на основании смоделированной тяги N1MOD(OLD), полученной на предыдущей итерации, и постоянной времени Т.
Предпочтительно, модель М переходной фазы различна для увеличения тяги или для уменьшения. Также существует модель М переходной фазы для каждого типа изменения тяги.
Как показано на фиг. 3, сверхтяга и недостаточность тяги турбореактивного двигателя контролируется двумя различными способами, которые включают в себя этапы 1SUR, 1SOUS различных обработок, так как они обращаются к различным моделям MSUR, MSOUS переходных фаз и различные функции FSUR, FSOUS фильтрации. Также пороги SSUR, SSOUS сигнализации различны в зависимости от нарушения контролируемой тяги, как показано на фиг. 3.
Для ясности, изобретение в дальнейшем представлено для случая недостаточности тяги, со ссылкой на основное схематическое представление фиг. 1.
Предпочтительно, как показано на фиг. 2, осуществляют инициализацию INIT функции фильтрации F, с одной стороны, во время запуска турбореактивного двигателя и, с другой стороны, в зависимости от знака отклонения Δ тяги.
Принимая во внимание, что функция фильтрации F имеет второй порядок, инициализация позволяет последней начать с предопределенных значений смоделированной тяги N1MOD(OLD). Инициализация функции фильтрации F в зависимости от знака отклонения Δ тяги позволяет избежать дивергенции способов контроля, в зависимости от типа контролируемого нарушения. Например, если фактическая тяга N1EFF больше, чем смоделированная тяга N1MOD (предположение сверхтяги), функция FSOUS фильтрации способа контроля недостаточности тяги (см. фиг. 3) может быть инициализирована, чтобы избежать противоречивых результатов, то есть ложных сигналов тревоги. В частности, такая инициализация является предпочтительной, когда ускорения сменяются замедлениями.
Предпочтительно, во время инициализации, ранее смоделированная тяга N1MOD(OLD) равна фактической тяге N1EFF турбореактивного двигателя.
Принятие в расчет устройства регулирования малого газа
Согласно предпочтительному аспекту изобретенияурбореактивный двигатель содержит устройство регулирования малого газа, выполненное с возможностью заменять заданное значение тяги, определенное с помощью рычага управления газом, на значение малого газа на основании определенных условий окружающей среды турбореактивного двигателя.
Например, со ссылкой на фиг. 4, когда пилот самолета желает максимально ограничить тягу турбореактивного двигателя, устройство регулирования малого газа заменяет заданное значение тяги N1MAN, установленное с помощью рычага управления газом, на величину малого газа N1RAL, чтобы снижение тяги не было слишком значительным для турбореактивного двигателя по отношению к другим ограничениям, чем режим N1 (режим N2, минимальный расход топлива, для ограничения риска самогашения факела пламени, и т.д.). Значение малого газа N1RAL не рассчитывается, но вытекает из различных ограничений устройства регулирования малого газа таким образом, чтобы обеспечить оптимальный термодинамический цикл для турбореактивного двигателя во время его замедления.
Однако, что касается способа контроля нарушения в виде сверхтяги согласно изобретению, необходимо принимать во внимание тот факт, что величина N1RAL малого газа соответствует заданному значению тяги N1CONS на малом газе.
С этой целью, со ссылкой на фиг. 4, для контроля сверхтяги, способ включает в себя этап сравнения заданного значения тяги N1MAN ручки со значением N1RAL малого газа, тяга максимальной величины используется как заданное значение тяги N1CONS в предыдущем этапе 1 обработки. Другими словами, если заданное значение тяги N1MAN, установленное рычагом управления газом, превышает значение малого газа N1RAL индуцированное устройством регулирования малого газа, способ контроля остается в соответствии с вариантом, показанным на фиг. 1.
Напротив, если заданное значение тяги N1MAN, установленное рычагом управления газом, ниже значения малого газа N1RAL, индуцированного устройством регулирования малого газа, способ контроля использует значение N1RAL малого газа как заданное значение тяги N1CONS в вышеупомянутом этапе 1 обработки.
Для достоверности способа контроля, важно знать значение N1RAL малого газа, независимо от устройства регулирования малого газа. С этой целью моделируют значение малого газа, как это будет описано в дальнейшем.
В примере, показанном на фиг. 4, значение N1RAL-MOD малого газа получается на основании модели MRAL малого газа, сочетающей смоделированное значение N1RAL-MOD малого газа с одним или несколькими значениями параметров окружающей среды турбореактивного двигателя. Тем не менее, очевидно, что смоделированное значение N1RAL-MOD малого газа может быть получено другими способами. Измеряя параметры окружающей среды турбореактивного двигателя, которые характерны для активации устройства регулирования малого газа, можно косвенно определить значение N1RAL-MOD малого газа.
В этом примере, со ссылкой на фиг. 4, модель MRAL, связывает смоделированное значение N1RAL-MOD малого газа с давлением Pamb окружающей среды турбореактивного двигателя и температурой Tamb окружающей среды турбореактивного двигателя. На практике, параметры Pamb окружающей среды турбореактивного двигателя являются избыточными параметрами, считающимися достоверными. В частности, эти параметры не имеют общего вида с контролируемыми нарушениями тяги. Само собой разумеется, что другие параметры окружающей среды также могут быть подходящими. Как и модель М переходной фазы, модель MRAL малого газа получена по результатам опыта на основании измерений, выполненных на таком же типе турбореактивного двигателя.
Как показано на фиг. 4, способ контроля содержит этап измерения параметров Pamb и Tamb окружающей среды турбореактивного двигателя таким образом, чтобы определить смоделированное значение N1RAL-MOD малого газа с помощью модели MRAL малого газа. После того, как получено смоделированное значение N1RAL-MOD малого газа, последнее сравнивается с заданным значением N1MAN тяги рычага управления, максимальная тяга используется в качестве заданного значения N1CONS тяги для этапа 1 обработки.
Благодаря принятию во внимание малого газа, улучшается точность контроля сверхтяги. В частности, это позволяет избежать объявления нарушения в виде сверхтяги, в то время как турбореактивный двигатель, обычно, отрегулирован на поднятое значение малого газа.
Изменяемый порог сигнализации
Для повышения робастности способа контроля по отношению к дисперсии между различными турбореактивными двигателями одного и того же типа, порог S сигнализации является, предпочтительно, изменяемым порогом, который учитывает дополнительные условия, чтобы, например, снизить значение порога S сигнализации и повысить чувствительность обнаружения. Другими словами, ссылаясь на фиг. 5, способ реализует контроль, по меньшей мере, одного дополнительного параметра COND1, COND2 турбореактивного двигателя. При обнаружении нарушения, относящегося к указанному дополнительному параметру COND1, COND2, порог S сигнализации штрафуется штрафным параметром PEN1, PEN2 для того, чтобы способствовать быстрому обнаружению нарушения тяги.
Предпочтительно, способ реализует контроль множества дополнительных параметров COND1, COND2 турбореактивного двигателя. Дополнительные параметры COND1, COND2 классифицируются в соответствии с их критичностью. Чем более критичен дополнительный параметр COND1, COND2, тем более важен штрафной параметр PEN1, PEN2 порога сигнализации. Таким образом, порог S является адаптивным для того, чтобы позволить быстрое реагирование, ограничивая при этом риск ложных срабатываний сигнализации, что выгодно.
В зависимости от типа контролируемого нарушения тяги (сверхтяги или недостаточность тяги) штрафной параметр PEN1, PEN2 может быть вычтен /добавлен к порогу S. Очевидно, что штрафной параметр PEN1, PEN2 также может быть представлен в виде множителя, математической функции и т.д. Предпочтительно, штрафной параметр COND2 установлен таким образом, чтобы последовательно отрегулировать порог S сигнализации.
Далее, несколько дополнительных параметров будут представлены в сочетании с их штрафными параметрами для контроля недостаточности тяги турбореактивного двигателя.
а) Измерение скорости изменения отклонения Δ тяги
В качестве примера, со ссылкой на фиг. 6, способ включает в себя этап измерения скорости изменения отклонения Δ тяги, то есть параметр  и этап сравнения скорости
и этап сравнения скорости  изменения отклонения тяги с предопределенным порогом SdΔ.
изменения отклонения тяги с предопределенным порогом SdΔ.
Если порог SdΔ не превышен, порог S сигнализации не изменяется. И наоборот, если порог SdΔ превышен, порог S сигнализации уменьшается с помощью штрафного параметра PENdΔ, что приводит к более чувствительному обнаружению нарушения тяги, как показано на фиг. 6.
Другими словами, если изменение отклонения Δ тяги очень быстрое, можно сделать вывод, что фактическая тяга N1EFF турбореактивного двигателя все меньше и меньше соответствует моделируемой тяге N1MOD, что является признаком нарушения тяги.
Предпочтительно, штрафной параметр PENdΔ зависит от скорости изменения отклонения Δ тяги, что позволяет постепенно отрегулировать порогов S сигнализации. В качестве примера, штрафной параметр PENdΔ может быть в виде коэффициента, равного 0,5, для быстрого изменения отклонения Δ тяги и в виде коэффициента, равного 0,2, для очень быстрого изменения отклонения Δ тяги.
б) Измерение скорости вала высокого давления
В качестве примера, со ссылкой на фиг. 7, способ включает в себя этап измерения скорости вала высокого давления, то есть режима N2 турбореактивного двигателя.
Аналогичным образом с валом низкого давления фактическая скорость N2EFF вала высокого давления сравнивается с моделируемой скоростью N2MOD, которая определяется напрямую в зависимости от положения рычага управления газом или косвенно с помощью модели переходной фазы, свойственной изменению скорости N2 вала высокого давления, подобную модели М переходной фазы, описанной выше.
Другими словами, реализуют этап измерения отклонения ΔN2 между фактической скоростью N2EFF и моделируемой скорости N2MOD и реализуют этап сравнения 7 этого отклонения ΔN2 режима высокого давления с порогом SN2 высокого давления заданной величины, как показано на фиг. 7.
Если порог SN2 не превышен, порог S сигнализации не изменяется. И наоборот, если порог SN2 превышен, порог S сигнализации уменьшается штрафным параметром PENN2, что приводит к более чувствительному обнаружению нарушения тяги.
Действительно, можно сделать вывод, что фактическая скорость N2EFF турбореактивного двигателя все менее и менее соответствует моделируемой скорости N2MOD, что характерно для нарушения тяги.
Такой дополнительный параметр позволяет повысить надежность контроля. Действительно, отношение скорости N1 и скорости N2 не является линейным во времени. В частности, время отклика вала высокого давления ниже времени отклика вала низкого давления. Таким образом, вал высокого давления ускоряется быстрее при низких оборотах, чем вал низкого давления. По этой причине, контроль, с одной стороны, режима N1 вала низкого давления и, с другой стороны, режима N2 вала высокого давления позволяет оптимально контролировать нарушение тяги.
Некоторые турбореактивные двигатели управляются во время переходных фаз в соответствии со скоростью N2CONS заданного значения или в соответствии с ускорением  . Поэтому, в соответствии с этим первым допущением реализуют этап измерения отклонения между эффективной скоростью выполняет шаг измерения отклонения между фактической скоростью N2EFF и заданной скоростью N2CONS. Другими словами, заданная скорость N2CONS заменяет смоделированную скорость N2MOD. Если турбореактивный двигатель управляется в зависимости от ускорения, ускорение
. Поэтому, в соответствии с этим первым допущением реализуют этап измерения отклонения между эффективной скоростью выполняет шаг измерения отклонения между фактической скоростью N2EFF и заданной скоростью N2CONS. Другими словами, заданная скорость N2CONS заменяет смоделированную скорость N2MOD. Если турбореактивный двигатель управляется в зависимости от ускорения, ускорение  заменяет моделируемую скорость N2MOD.
заменяет моделируемую скорость N2MOD.
с) Обнаружение дополнительных событий
Кроме измерения режима вала низкого давления N1 и вала высокого давления N2, турбореактивный двигатель может содержать средства детектирования дополнительных параметров, способных повлиять на тягу турбореактивного двигателя.
В качестве примера, со ссылкой на фиг 8, турбореактивный двигатель может содержать средства для обнаружения помпажа турбореактивного двигателя для применения штрафного параметра PENPOM помпажа к порогу S сигнализации в случае обнаружения такого помпажа.
Схожим образом, также со ссылкой на фиг. 8, турбореактивный двигатель может содержать средства для обнаружения самогашения факела пламени турбореактивного двигателя для применения штрафного параметра PENEXT самогашения факела пламени к порогу S сигнализации в случае обнаружения такого самогашения факела пламени.
В примере, показанном на фиг. 8, штрафные параметры PENPOM и PENEXT используются вместе, но очевидно, что они могут быть добавлены независимо к порогу S сигнализации. Таким образом, если обнаружено дополнительное событие, способное повлиять на тягу (помпаж или самогашение факела пламени), уменьшают значение порога S сигнализации для повышения чувствительности обнаружения.
Кроме того, в предпочтительном варианте осуществления изобретения, штрафные параметры PENPOM и PENEXT могут отменить порог S сигнализации, чтобы непосредственно включать сигнал тревоги.
д) Измерение изменения скорости вала низкого давления или высокого давления
Предпочтительно, способ может включать в себя этап измерения скорости изменения отклонения ΔN1, ΔN2 во время переходной фазы, другими словами параметры 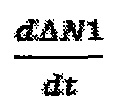 или
или 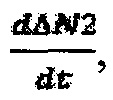 и этап сравнения с предопределенным порогом SΔN1 или SΔN2. Аналогичным образом, штрафной параметр может зависеть от скорости изменения отклонения ΔN1, ΔN2, что позволяет постепенно отрегулировать порог S сигнализации.
и этап сравнения с предопределенным порогом SΔN1 или SΔN2. Аналогичным образом, штрафной параметр может зависеть от скорости изменения отклонения ΔN1, ΔN2, что позволяет постепенно отрегулировать порог S сигнализации.
Предпочтительно, такой контроль позволяет обнаружить нарушение тяги реактивным образом. В самом деле, нарушение тяги вызывает ненормальное изменение отклонения ΔN1 или ΔN2, которое может быть быстро обнаружено.
е) Осуществление приоритетной сигнализации
В предпочтительном варианте осуществления, штрафные параметры имеют отрицательное значение для способа контроля недостатка-тяги. Таким образом, даже если отклонение тяги Δ равно нулю, сигнализация может быть выдана напрямую. Другими словами, штрафной параметр позволяет вызвать приоритетные сигнализации, которые не зависят от отклонения Δ тяги. Это позволяет преимущественно иметь высокореактивный способ контроля.
Дополнительные параметры, контролируемые турбореактивным двигателем, независимо представлены на фиг. 6-8, но само собой разумеется, что они могут контролироваться комбинированно.
Если нарушение тяги обнаружено на турбореактивном двигателе, можно исправить это нарушение с помощью другого турбореактивного двигателя, который также находится в переходной фазе, изменяя заданное значение тяги, которое у него свое. Таким образом, тяга контролируется и корректируется в реальном времени, что повышает безопасность и надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ВРАЩАЮЩЕГОСЯ СРЫВА ПОТОКА В КОМПРЕССОРЕ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2019 |
|
RU2770630C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЗАДАННОГО ЗНАЧЕНИЯ ПАРАМЕТРА, КОТОРЫЙ ВЛИЯЕТ НА ТЯГУ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2630068C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ВРАЩАЮЩЕГОСЯ СРЫВА ПОТОКА В КОМПРЕССОРЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2011 |
|
RU2577921C2 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ. СПОСОБ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ (ВАРИАНТЫ). СПОСОБ ПРОИЗВОДСТВА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ. СПОСОБ ПРОМЫШЛЕННОГО ПРОИЗВОДСТВА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ. СПОСОБ ЭКСПЛУАТАЦИИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2487333C1 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ УРОВНЯ МАСЛА, СОДЕРЖАЩЕГОСЯ В БАКЕ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2557838C2 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ И ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2556058C2 |
| СПОСОБ СЕРИЙНОГО ПРОИЗВОДСТВА ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ И ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ, ВЫПОЛНЕННЫЙ ЭТИМ СПОСОБОМ | 2013 |
|
RU2555942C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕГРАДАЦИИ ТУРБОМАШИНЫ ПОСРЕДСТВОМ КОНТРОЛЯ ХАРАКТЕРИСТИК УПОМЯНУТОЙ ТУРБОМАШИНЫ | 2013 |
|
RU2618833C2 |
| Способ управления турбореактивным двухконтурным двигателем | 2018 |
|
RU2692189C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ, СОДЕРЖАЩЕЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2019 |
|
RU2793115C2 |
Настоящее изобретение относится к области контроля тяги газотурбинного двигателя, в частности турбореактивного двигателя для приведения в движение летательного аппарата. Способ контроля нарушения тяги турбореактивного двигателя летательного аппарата с помощью вычислителя, размещенного на указанном аппарате, при изменении заданного значения тяги (N1CONS) указанного турбореактивного двигателя, фактическая тяга (N1EFF) турбореактивного двигателя изменяется во время переходной фазы для достижения желаемого данного значения тяги (N1CONS), причем способ содержит этап обработки заданного значения тяги (N1CONS) с помощью функции фильтрации и модели переходной фазы таким образом, чтобы получить смоделированную тягу (N1MOD), этап измерения фактической фазы (N1EFF), этап сравнения указанной смоделированной тяги (N1MOD) с указанной фактической тягой (N1EFF) для определения отклонения (Δ) тяги, этап сравнения указанного отклонения (Δ) тяги с порогом (S) сигнализации и этап передачи сигнала тревоги в случае превышения указанного порога (S) сигнализации, способ, в котором на данной итерации смоделированная ранее тяга известна, модель переходной фазы предоставляет постоянную времени на основании смоделированной ранее тяги, функция фильтрации предоставляет смоделированную тягу (N1MOD) на основании полученной постоянной времени, смоделированной ранее тяги и заданного значения тяги (N1CONS). 7 з.п. ф-лы, 8 ил.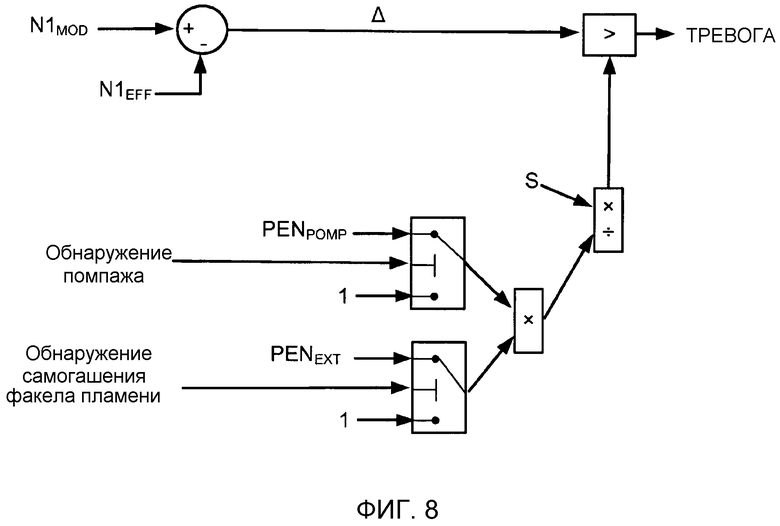
1. Способ контроля нарушения тяги турбореактивного двигателя летательного аппарата с помощью вычислителя, размещенного на указанном летательном аппарате, при изменении заданного значения тяги (N1CONS) указанного турбореактивного двигателя, фактическая тяга (N1EFF) турбореактивного двигателя изменяется во время переходной фазы для достижения желаемого заданного значения тяги (N1CONS),
причем способ содержит:
- этап обработки заданного значения тяги (N1CONS) с помощью функции (F) фильтрации и модели (М) переходной фазы, полученной по результатам предыдущего опыта на основании измерений, реализованных на таком же типе турбореактивного двигателя, таким образом, чтобы получить смоделированную тягу (N1MOD);
- этап измерения фактической тяги (N1EFF);
- этап сравнения указанной смоделированной тяги (N1MOD) с указанной фактической тягой (N1EFF) для определения отклонения (Δ) тяги;
- этап сравнения указанного отклонения (Δ) тяги с порогом (S) сигнализации; и
- этап передачи сигнала тревоги в случае превышения указанного порога (S) сигнализации;
при этом в способе:
- при заданной итерации смоделированная ранее тяга (N1MOD(OLD)) известна, модель переходной фазы предоставляет постоянную времени (T) на основании смоделированной ранее тяги (N1MOD(OLD)), функция (F) фильтрации предоставляет смоделированную тягу (N1MOD) на основании полученной постоянной времени (T), смоделированной ранее тяги (N1MOD(OLD)) и заданного значения тяги (N1CONS).
2. Способ по п. 1, в котором осуществляют инициализацию функции (F) фильтрации в зависимости от знака отклонения тяги (Δ) при запуске турбореактивного двигателя, ранее смоделированная тяга (N1MOD(OLD)) равна фактической тяге (N1EFF) турбореактивного двигателя во время этой инициализации.
3. Способ по п. 1, в котором функция (F) фильтрации является функцией фильтра нижних частот, предпочтительно передаточной функцией второго порядка.
4. Способ по п. 1, в котором турбореактивный двигатель содержит устройство регулирования малого газа, выполненное с возможностью заменять заданное значение (N1MAN), определенное рычагом управления газом, на величину (N1RAL) малого газа в зависимости от определенных условий внешней среды турбореактивного двигателя, причем способ включает в себя, для контроля сверхтяги, этап измерения по меньшей мере одного параметра окружающей среды турбореактивного двигателя таким образом, чтобы определить, заменено ли заданное значение (N1MAN) рычага управления газом на величину (N1RAL) малого газа.
5. Способ по п. 4, в котором способ контроля включает в себя определение смоделированного значения (N1RAL-MOD) малого газа с помощью модели (MRAL) малого газа, которая связывает смоделированное значение (N1RAL-MOD) малого газа с одним или несколькими значениями параметров окружающей среды турбореактивного двигателя.
6. Способ по п. 5, в котором модель (MRAL) малого газа связывает смоделированное значение (N1RAL-MOD) малого газа с давлением окружающей среды турбореактивного двигателя и/или температурой окружающей среды турбореактивного двигателя.
7. Способ по п. 1, в котором порог (S) сигнализации является параметрируемым порогом, турбореактивный двигатель включает в себя средства контроля состояния по меньшей мере одного дополнительного условия (COND1, COND2) турбореактивного двигателя, применяют штрафной параметр (PEN1, PEN2) к указанному порогу (S) сигнализации при обнаружении ненормального состояния указанного дополнительного условия (COND1, COND2).
8. Способ по п. 7, в котором применяют штрафной параметр (PEN1, PEN2) к указанному порогу (S) сигнализации, который зависит от критичности контролируемого дополнительного условия (COND1, COND2).
| Резец для горных машин | 1987 |
|
SU1420153A1 |
| FR 2883330 A1, 22.09.2006 | |||
| СИСТЕМА КОНТРОЛЯ И СПОСОБ КОНТРОЛЯ | 2008 |
|
RU2477380C2 |

