Настоящее изобретение относится к системе контроля и способу контроля, применяемым, в частности, для турбореактивного двигателя.
Многие летательные аппараты, в частности, предназначенные для гражданских перевозок, оборудованы реверсорами тяги, позволяющими улучшить торможение упомянутых летательных аппаратов во время посадки. Эти реверсоры тяги связаны с двигателями летательных аппаратов и выполнены с возможностью управления для перехода из неактивного убранного положения в активное выдвинутое положение. В активном выдвинутом положении на реверсор тяги попадает реактивная струя соответствующего двигателя, и он меняет направление тяги на противоположное, что позволяет ей участвовать в торможении летательного аппарата.
Как правило, двигатели летательного аппарата оборудованы одним реверсором тяги. Активацию реверсора тяги двигателя производит пилот при помощи органа типа рычага реверса, находящегося на рычаге газа, связанном с этим двигателем. Действие на рычаг реверса возможно, только если рычаг газа находится в положении, соответствующем режиму малого газа двигателя.
В документе ЕР-А-1512627 (US-А-1107757) описан летательный аппарат, оборудованный несколькими двигателями с индивидуальным управлением режима работы между режимом малого газа и режимом полных оборотов при помощи рычагов газа, связанных с этими двигателями. Некоторые из двигателей оборудованы реверсорами тяги, которые могут управляться для перехода из неактивного положения в активное выдвинутое положение, и, наоборот, из активного выдвинутого положения в неактивное убранное положение; другие двигатели не содержат таких реверсоров тяги. Можно предусмотреть защитное устройство для блокировки, по меньшей мере, начиная с положения, соответствующего режиму малого газа, действия рычагов газа, соответствующих двигателям, не оборудованным реверсорами тяги, когда реверсоры переводят из неактивного убранного положения в активное выдвинутое положение. Но в этом документе на указано, каким образом осуществляют контроль за турбореактивными двигателями, содержащими реверсор тяги, по отношению к состоянию реверсора.
В документе ЕР-А-0843089 описана электрическая система управления для реверсора тяги турбореактивного двигателя, установленного на самолете, при этом реверсор содержит, по меньшей мере, один подвижный элемент, выполненный с возможностью перемещения из убранного положения в выдвинутое положение реверсора. Система содержит, по меньшей мере, один набор электромеханических приводных органов для перемещения подвижного элемента между убранным и выдвинутым положениями реверсора тяги. Система содержит также электронный блок управления электромеханическими органами управления, при этом блок электрически соединен с электронной системой регулирования турбореактивного двигателя. С одной стороны, блок предназначен для преобразования команд на выдвигание и убирание подвижных элементов, подаваемых электронной системой регулирования, в последовательности управления приводными электромеханическими органами и, с другой стороны, для передачи в электронную систему регулирования информации о состоянии приводных органов и о положении подвижных элементов.
В этой системе данные от датчиков поступают в систему регулирования через электронный блок управления. Недостатком является необходимость обеспечения совместимости блока и системы регулирования турбореактивного двигателя, в частности, система регулирования должна следовать действиям электронного блока управления, что делает систему управления сложной.
В связи с этим возникает потребность в более простой системе контроля.
Для этого изобретением предлагается система контроля, содержащая:
- датчики состояния реверсора тяги турбореактивного двигателя,
- контрольное вычислительное устройство,
- устройство управления реверсором, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления,
- устройство регулирования турбореактивного двигателя, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления.
Согласно варианту контрольное вычислительное устройство выполнено с возможностью контроля электрического питания реверсора тяги.
Согласно варианту контрольное вычислительное устройство содержит блоки, выбранные из группы, в которую входят блок контроля электрического питания реверсора тяги, блок контроля изменения состояния реверсора тяги, блок контроля регулирования турбореактивного двигателя.
Согласно варианту, датчики состояния выполнены с возможностью передачи данных в устройство регулирования.
Согласно варианту устройство регулирования выполнено с возможностью передачи данных о работе турбореактивного двигателя в вычислительное устройство.
Изобретением предлагается также летательный аппарат, содержащий:
- по меньшей мере, один турбореактивный двигатель с реверсором тяги,
- описанную выше систему, осуществляющую контроль турбореактивного двигателя.
Изобретением предлагается также способ контроля турбореактивного двигателя, применяемый в описанной выше системе, содержащий следующие этапы:
- передача данных о состоянии реверсора тяги датчиками состояния в вычислительное устройство через устройство управления,
- контроль устройства управления вычислительным устройством в зависимости от данных,
- контроль устройства регулирования вычислительным устройством в зависимости от данных.
Согласно варианту способ дополнительно содержит этап контроля электрического питания реверсора тяги вычислительным устройством.
Согласно варианту способ дополнительно содержит этапы:
- передачи данных состояния реверсора тяги датчиками состояния в устройство регулирования,
- проверки устройством регулирования соответствия данных, полученных от датчиков состояния, с командой, полученной от вычислительного устройства.
Согласно варианту способ дополнительно содержит этап передачи устройством регулирования данных о работе турбореактивного двигателя в вычислительное устройство.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего подробного описания вариантов его выполнения, представленных исключительно в качестве примеров, со ссылками на прилагаемые чертежи, на которых:
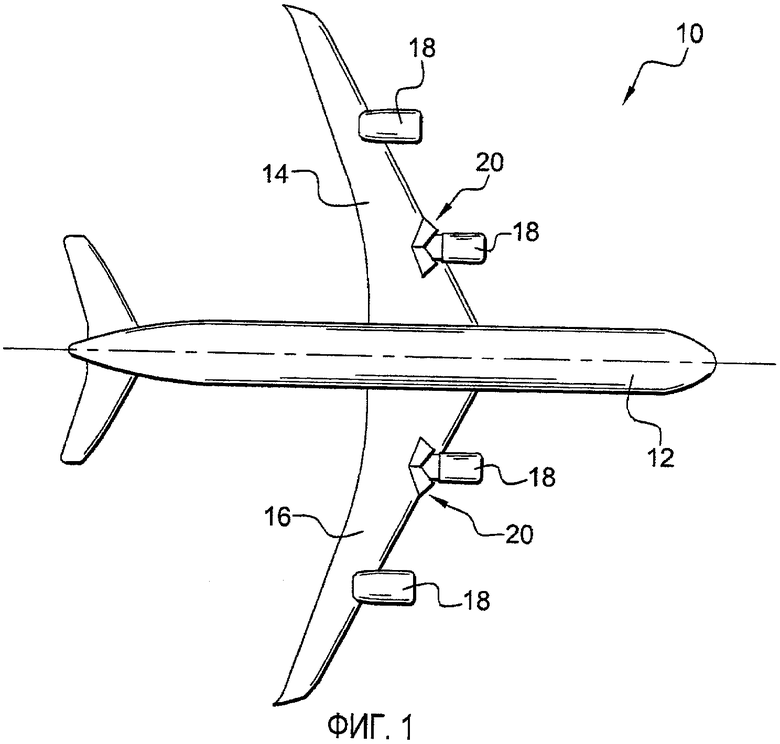
Фиг.1 - схематичный вид летательного аппарата.
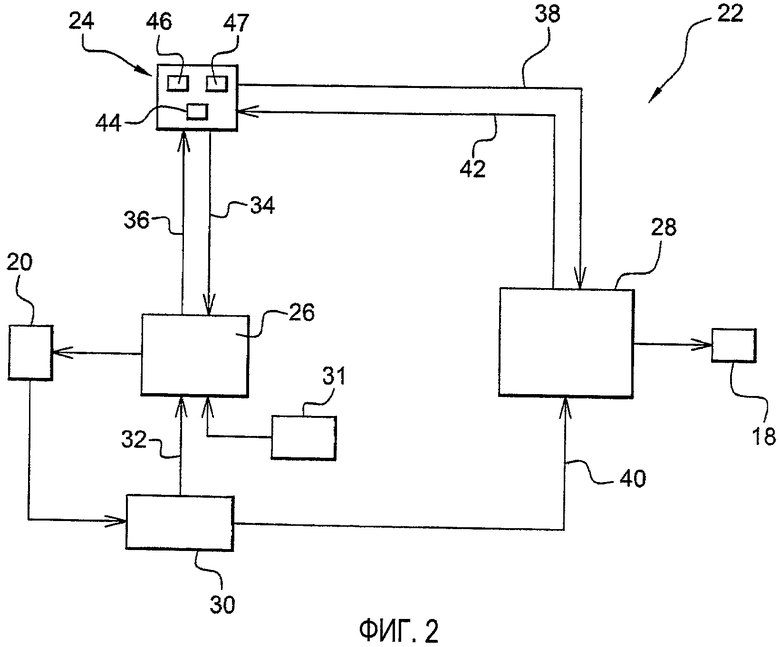
Фиг.2 - схема системы контроля.
Изобретением предлагается система контроля, содержащая датчики состояния реверсора тяги турбореактивного двигателя и содержащая контрольное вычислительное устройство. Система содержит также устройство управления реверсором и устройство регулирования турбореактивного двигателя. Устройство управления управляется вычислительным устройством в зависимости от данных, передаваемых датчиком в вычислительное устройство через устройство управления. Устройство регулирования управляется вычислительным устройством в зависимости от данных, передаваемых датчиком в вычислительное устройство через устройство управления. Благодаря этой системе устройство управления и устройство регулирования не связаны друг с другом. Это позволяет избежать обеспечения совместимости устройств управления и регулирования. Это представляет интерес во время изготовления или обслуживания системы, так как эти два устройства можно рассматривать независимо друг от друга. Эту систему можно применять для турбореактивного двигателя летательного аппарата. Эта система является более простой.
На фиг.1 схематично показан летательный аппарат 10, содержащий фюзеляж 12 и два крыла 14, 16, симметричные относительно фюзеляжа 12. На каждом из крыльев 14, 16 установлены турбореактивные двигатели 18. На фиг. 1 в качестве примера показаны два турбореактивных двигателя 18 на каждом крыле. На крыле может быть установлен только один турбореактивный двигатель 18.
По меньшей мере, один турбореактивный двигатель на каждом крыле оборудован реверсором тяги 20. Реверсор тяги 20 может переходить из неактивного убранного положения в активное выдвинутое положение и наоборот. В активном выдвинутом положении на реверсор тяги 20 действует реактивная струя соответствующего турбореактивного двигателя, и он направляет струю в противоположном направлении, что позволяет реверсору тяги 20 участвовать в торможении летательного аппарата. Например, реверсор тяги 20 выполнен в виде реверсора с задними створками, но он может иметь и другую конструкцию. На фиг. 1 реверсоры тяги 20 показаны в выдвинутом положении.
Каждый реверсор тяги 20 приводится в действие приводными органами, не показанными на фигурах. Приводные органы могут содержать электрический домкрат, который может быть нереверсивным, и, по меньшей мере, один электрический замок удержания створки, называемый первичным замком. Домкрат может приводиться в действие электрическим двигателем, управляемым устройством 26 управления.
На фиг.2 показана схема системы 22 контроля. Эта система 22 обеспечивает контроль за одним или несколькими турбореактивными двигателями. Контроль турбореактивного двигателя может содержать контроль нескольких рабочих параметров турбореактивного двигателя, в том числе регулирование мощности турбореактивного двигателя, а также контроль за движением реверсора тяги 20. В частности, система 22 контроля обеспечивает, например, управление мощностью турбореактивного двигателя в зависимости от положения реверсора тяги 20, что позволяет избежать опасных ситуаций пилотирования, при которых турбореактивный двигатель может находиться в максимальном режиме, в то время как реверсор тяги 20 меняет свое положение. В дальнейшем система 22 будет описана относительно одного турбореактивного двигателя, но можно предусмотреть контроль более чем за одним турбореактивным двигателем.
Как показано на фиг.2, система 22 контроля может содержать контрольное вычислительное устройство 24. Система 22 контроля может также содержать устройство 26 управления реверсором 20 турбореактивного двигателя 18 и устройство 28 регулирования турбореактивного двигателя 18. Кроме того, система 22 контроля содержит датчики 30 состояния реверсора тяги 20. Система 22 содержит столько же устройств 26 и 28, сколько имеется турбореактивных двигателей с реверсором тяги на летательном аппарате.
Датчики 30 позволяют определить положение реверсора 20 и, в целом, определить состояние реверсора 20. Каждый реверсор 20 оборудован датчиками 30, обнаруживающими состояние соответствующего реверсора 20. Данные датчиков 30 могут относиться к выдвинутому состоянию или к убранному состоянию реверсора. Данные датчиков 30 могут также относиться к изменению текущего состояния. Данные датчиков обрабатываются контрольным вычислительным устройством 24. Другие датчики 31 могут выдавать данные в устройство 26, которые, в случае необходимости, могут затем быть переданы в вычислительное устройство 24; например, речь может идти о датчиках замков.
Предусмотрено одно контрольное вычислительное устройство 24 на двигатель. Может быть также предусмотрено одно контрольное вычислительное устройство 24 для контроля всех турбореактивных двигателей летательного аппарата. Таким образом, для контроля всех турбореактивных двигателей 18 в летательном аппарате предусмотрено единое вычислительное устройство 24. Контрольное вычислительное устройство 24 может находиться в кабине экипажа летательного аппарата и централизованно контролировать турбореактивные двигатели 18. Интерес использования вычислительного устройства на уровне бортовых систем состоит в возможности компиляции команд, на основании данных разного характера, таких как параметры, задаваемые полетом, состояние полета летательного аппарата и данные, связанные с состоянием реверсоров тяги. Вычислительное устройство 24 может содержать несколько блоков для выполнения функций вычислительного устройства 24. Блок 44 может выполнять функцию контроля изменения состояния реверсора тяги. Другой блок 46 может выполнять функцию контроля питания реверсоров. Дополнительный блок 47 может выполнять функцию контроля регулирования турбореактивного двигателя. Преимуществом наличия нескольких блоков является соблюдение защитных требований блокировки выдвигания реверсора за пределами рабочего диапазона.
Устройство 26 управления позволяет управлять реверсором 20. В частности, устройство 26 позволяет управлять изменением положения реверсора тяги 20. Устройство 26 управляет изменением состояния реверсора 20, то есть управляет переходом из неактивного убранного состояния в активное выдвинутое состояние и наоборот. Предпочтительно устройство 26 управления связано с каждым реверсором тяги 20; устройство 26 управления находится в крыле летательного аппарата вблизи соответствующего реверсора. Устройство 26 управления получает данные от датчиков 20 реверсора тяги 20. Эти данные относятся к состоянию реверсора 20: речь может идти о выдвинутом или убранном состоянии реверсора 20, а также о том, что реверсор 20 находится в процессе изменения состояния. На фиг.2 прохождение данных от датчиков 30 в устройство 26 управления показано стрелкой 32. Данные датчиков 30 централизованно поступают на уровень устройства 26 управления. После этого данные передаются устройством 26 в контрольное вычислительное устройство 24. На фиг. 2 передача данных от устройства 26 управления в контрольное вычислительное устройство 24 показана стрелкой 36. Таким образом, данные датчиков передаются напрямую в контрольное вычислительное устройство 24 через устройство 26 управления. Это позволяет быстрее передавать данные, выдаваемые датчиками 30, в контрольное вычислительное устройство 24. То, что данные датчиков передаются устройством 26 управления напрямую в контрольное вычислительное устройство 24 без прохождения через устройство 28 регулирования, позволяет также упростить устройство 28 регулирования. Действительно, можно сократить число алгоритмов в устройстве 28 регулирования, так как устройство 28 регулирования больше не выполняет функции ретранслирующего передатчика данных между устройством 26 управления и контрольным вычислительным устройством 24. Входные данные алгоритмов находятся на уровне самолет/гондола и будут обрабатываться непосредственно устройством 24. Это позволяет также упростить систему соединений для передачи данных и упростить архитектуру управления и контроля этой системы.
Устройство 26 управления контролируется контрольным вычислительным устройством 24. Контрольное вычислительное устройство 24 выдает команды на устройство 26 управления, чтобы оно управляло движениями реверсора тяги 20. В частности, контрольное вычислительное устройство 24 обнаруживает намерение пилота включить изменение состояния реверсора тяги 20. В этом случае контрольное вычислительное устройство 24 инициирует изменения состояния реверсора тяги 20 через устройство 26 управления. Команды, направляемые контрольным вычислительным устройством 24 в устройство 26 управления, схематично показаны стрелкой 34 на фиг. 2. Вычислительное устройство 24 комбинирует действия пилота с данными, поступающими от датчиков 30, для формирования команды, направляемой в устройство 26 управления. Таким образом, команда, выдаваемая вычислительным устройством 24, зависит от знания положения реверсора, что способствует обеспечению безопасности пилотирования летательного аппарата. Команда, направляемая в устройство 26 управления, состоит, например, в активации выдвигания или убирания реверсора тяги 20. По получении команды устройство 26 управления преобразует эту команду в последовательность управления. Последовательность управления представляет собой ряд сигналов, которые могут быть расшифрованы приводными органами и замками реверсора. Например, устройство 26 направляет в электрический двигатель приведения в действие домкрата створки команду скорости.
Можно также предусмотреть, чтобы устройство 26 управления проверяло соответствие команды, полученной от вычислительного устройства 24, с данными, поступившими от датчиков 30. Это является дополнительным элементом обеспечения безопасности.
При такой архитектуре устройство 26 управления непосредственно связано с контрольным вычислительным устройством 24. Иначе говоря, устройство 26 управления непосредственно сообщается с контрольным вычислительным устройством 24. Таким образом, устройство 28 регулирования уже не участвует в сообщении между устройством 26 управления и контрольным вычислительным устройством 24; устройство 26 управления подчинено непосредственно вычислительному устройству 24. В отличие от документа ЕР-А-0843089, где раскрыта естественная тенденция прохождения команд от вычислительного устройства 24 через устройство 28 регулирования в силу географической близости устройства 28 регулирования относительно устройства 26 управления, архитектура в соответствии с настоящим изобретением обходится без интегрирования и обеспечения совместимости двух устройств. Это упрощает, в частности, изготовление и обслуживание устройств 26, 28, так как каждое устройство можно рассматривать независимо друг от друга.
Другим преимуществом является снижение критичности устройства 26 управления. Иначе говоря, поскольку устройство 26 подчинено контрольному вычислительному устройству 24 без промежуточного звена, устройство 26 оказывается напрямую под контролем вычислительного устройства 24. Таким образом, отслеживание действий устройства 26 управления вычислительным устройством 24 оказывается более тесным, что позволяет снизить требования автономии устройства 26 управления. Следовательно, устройство 26 может быть более дешевым за счет снижения уровня сложности.
Отказавшись от присутствия устройства 28 регулирования в качестве промежуточного звена между устройством 26 управления и контрольным вычислительным устройством 24, можно быстрее обнаруживать неисправности системы. Действительно, вычислительное устройство 24 быстрее обнаруживает нарушения в работе устройства 26 управления, реверсора или приводного органа. Устройство 28 регулирования больше не отвечает за обнаружение неисправностей системы, что тоже упрощает его изготовление и обслуживание.
Устройство 28 обеспечивает регулирование турбореактивного двигателя. Иначе говоря, устройство 28 воздействует на турбореактивный двигатель для изменения его мощности. Устройством 28 регулирования может быть FADEC (от английского Full Authority Digital Engine Control). Предпочтительно с каждым турбореактивным двигателем связано одно устройство 28 регулирования. Сигнал выхода из устройства 28 позволяет регулировать мощность турбодвигателя.
Устройство 28 регулирования учитывает данные датчиков 30 и данные вычислительного устройства 24 для изменения мощности турбореактивного двигателя. Контрольное вычислительное устройство 24 направляет команды в устройство 28 регулирования, чтобы оно регулировало мощность турбореактивного двигателя. Таким образом, контрольное вычислительное устройство 24 инициирует изменение мощности турбореактивного двигателя через устройство 28 регулирования. Команды, направляемые контрольным вычислительным устройством 24 в устройство 28 регулирования, схематично показаны на фиг. 2 стрелкой 38. В частности, вычислительное устройство 24 контролирует устройство регулирования с учетом данных, поступающих от датчиков в вычислительное устройство 24 через устройство 26 управления. Вычислительное устройство 24 интерпретирует действия пилота и обрабатывает данные, поступающие от датчиков 30, для формирования команды, направляемой в устройство 28 регулирования. Это позволяет регулировать мощность турбореактивного двигателя в зависимости от положения реверсора 20. Действительно, устройство 28 регулирования не должно, например, задавать турбореактивному двигателю максимальный режим, если реверсор 20 находится в процессе изменения положения. Это могло бы привести к повреждению реверсора 20. Наоборот, во время переходных фаз реверсоров 20 турбореактивный двигатель переводится в режим малого газа. Таким образом, контроль, осуществляемый вычислительным устройством 24, зависит от знания положения реверсора 20, что повышает безопасность пилотирования летательного аппарата.
При такой архитектуре устройство 28 регулирования находится в непосредственной связи с контрольным вычислительным устройством 24 для регулирования турбореактивного двигателя. Контроль устройств 26, 28 происходит параллельно, то есть по разным линиям связи. Устройство 28 регулирования не получает информацию непосредственно от устройства 26 управления. Устройства 26 и 28 не сообщаются напрямую друг с другом. Устройство 28 регулирования находится за пределами канала связи между вычислительным устройством 24 и устройством 26 управления. Таким образом, нет необходимости применять одинаковые стандарты и протоколы связи между двумя устройствами 26 и 28. Можно менять или изменять стандарт или протокол связи только для одного из устройств 26, 28.
При такой архитектуре можно снизить критичность устройства 28 регулирования. Иначе говоря, поскольку устройство 28 не контролирует устройство 26 управления, функция контроля устройства 26 управления переходит к вычислительному устройству 24. Это позволяет снизить требования полномочий и автономии устройства 28 регулирования в том, что касается функции реверсора. Следовательно, устройство 28 регулирования может быть более облегченным с точки зрения числа материальных входов/выходов.
Можно также предусмотреть, чтобы устройство 28 регулирования получало данные от датчиков 30 состояния реверсора. Это схематично показано на фиг. 2 стрелкой 40. Это позволяет устройству 28 регулирования проверять соответствие команд, поступающих от контрольного вычислительного устройства 24, с состоянием реверсоров. Это создает дополнительную линию обеспечения безопасности.
Устройство 28 регулирования может направлять данные о работе турбореактивного двигателя в контрольное вычислительное устройство 24. Это схематично показано на фиг. 2 стрелкой 42. Данные, выдаваемые устройством 28 регулирования, могут быть, например, данными о режиме или температуре турбореактивного двигателя, о неисправностях или нарушениях в работе турбореактивного двигателя. Это позволяет вычислительному устройству 24 лучше отслеживать и, следовательно, контролировать работу турбореактивного двигателя.
Различные элементы системы 20 контроля могут быть связаны между собой при помощи сети AFDX (от английского Avionics Fyll Duplex). Речь идет об избыточной и надежной сети Ethernet, которая служит средством внутренней связи самолета. Чтобы соответствовать требованиям постоянной возможности установления связи в сети системы, сеть AFDX является физически избыточной: каждый элемент системы 22 направляет сообщения по разным каналам. Это позволяет избежать сбоев при передаче данных и проблем, связанных с неисправностями оборудования.
Контрольное вычислительное устройство 24 может синхронизировать перемещения реверсоров. Синхронизация обеспечивается за счет использования вычислительного устройства 24, которое имеет одинаковые алгоритмы для каждого двигателя с его собственными входами.
Кроме описанного выше первичного замка, система 22 контроля может содержать один или несколько других замков, позволяющих увеличить число линий обеспечения безопасности летательного аппарата. В качестве вторичного замка система 22 может содержать тормоз, применяемый для приводных органов реверсоров. Например, тормоз можно применять для электрического двигателя, приводящего в действие домкрат реверсора, или для самого домкрата. Этот вторичный замок предназначен для удержания створки реверсора в случае отказа первичного замка. Вторичный замок может управляться устройством 26 управления. Независимо от наличия вторичного замка, система 22 может содержать третичный замок, позволяющий удерживать створку в случае отказа других замков. Этим третичным замком управляют непосредственно из кабины экипажа. Третичный замок может также управляться другим вычислительным устройством, отличным от вычислительного устройства 24. Это другое вычислительное устройство может действовать в зависимости от положения рычага реверса тяги или в зависимости от параметра полета летательного аппарата. Датчики выполнены с возможностью передачи данных о состоянии этих замков.
Система 22 контроля может также контролировать распределение электрического питания между различными элементами системы. Предпочтительно питание отключается, чтобы избежать несвоевременного выдвигания реверсоров, в частности, во время полета, что могло бы иметь тяжелые последствия. Отключение питания является дополнительным элементом обеспечения безопасности. Контрольное вычислительное устройство 24 может управлять электрическим питанием реверсора тяги 20 и, в частности, приводных органов (например, электрического двигателя приведения в действие домкрата) реверсора тяги 20. Вычислительное устройство 24 выполнено с возможностью включения или отключения электрического питания приводных органов реверсора 20. Отключать питание контрольное вычислительное устройство 24 может напрямую или через устройство 26 управления. Контрольное вычислительное устройство 24 может также управлять электрическим питанием устройства 26 управления; в частности, вычислительное устройство 24 может отключать электрическое питание устройства 26 управления, если в нем обнаруживаются неисправности.
Способ контроля турбореактивного двигателя, применяемый в системе 22 контроля, может содержать этап передачи данных о состоянии реверсора 20 от датчиков 30 в вычислительное устройство 24 через устройство 26 управления. Затем способ может содержать этап контроля устройства 26 управления вычислительным устройством 24 в зависимости от этих данных и контроля устройства 28 регулирования вычислительным устройством 24 в зависимости от этих данных. Согласно этому способу контроль каждого устройства 26 и 28 вычислительным устройством 24 осуществляется параллельно; только вычислительное устройство 24 может управлять устройством 26 и устройством 28. Преимущества такого контроля были указаны выше.
Далее следует описание примера работы. В данном случае речь идет только о выдвигании реверсора, поскольку убирание реверсора происходит по такому же принципу. В случае необходимости, в первую очередь разблокируют третий замок. После осуществления разблокировки датчики, связанные с третичным замком, сообщают об этом вычислительному устройству 24, в случае необходимости, через устройство 26 управления. На уровне вычислительного устройства 24 происходит первая последовательность действий. Вычислительное устройство 24 (в частности, блок 46) включает питание приводных органов, в частности, приводного двигателя домкрата, в случае необходимости, через устройство 26 управления. После включения питания приводных органов вычислительное устройство 24 (в частности, блок 44) направляет команду на выдвигание в устройство 26 управления. После этого на уровне устройства 26 управления может происходить вторая последовательность действий. После получения команды от контрольного вычислительного устройства 24 устройство 26 управляет разблокировкой вторичного замка. Как только датчики, связанные с вторичным замком, обнаруживают, что вторичный замок разблокирован, информация об этом передается в устройство 26 управления. По получении этой информации устройство 26 управления разблокирует первичный замок. Как только датчики, связанные с первичным замком, обнаруживают, что первичный замок разблокирован, информация об этом передается в устройство 26 управления. По получении этой информации устройство 26 управления управляет открыванием створки путем активации приводного двигателя домкрата. Как только датчики 30 состояния реверсора обнаруживают, что створка открыта, они передают информацию об этом в устройство 26 управления. Информация переправляется в вычислительное устройство 24. Вычислительное устройство 24 может отключить электрическое питание. Это отключение приводит к блокировке створок реверсора, и реактивная струя меняет свое направление на противоположное. После этого вычислительное устройство 24 может направить команду в устройство 28 регулирования для изменения мощности турбореактивного двигателя. Устройство 28 может повысить мощность турбореактивного двигателя для усиления торможения летательного аппарата. Можно также предусмотреть, чтобы информация об открытии створки реверсора передавалась непосредственно в устройство 28 регулирования, которое может сравнить эту информацию с командами, полученными от вычислительного устройства 24.
Следует отметить, что вышеупомянутые датчики могут не только сообщать о конечном состоянии событий, но также о текущем состоянии событий. Это позволяет лучше контролировать выдвигание створок реверсора. Следует также отметить, что в вычислительное устройство могут переправляться все данные или только часть этих данных; в частности, данные о состоянии вторичного и третичного замков могут переправляться в вычислительное устройство, тогда как данные о состоянии первичного замка могут оставаться на уровне устройства управления. Это позволяет облегчить оборудование с точки зрения количества входов/выходов.
Изобретение относится к системе контроля, которая содержит датчики состояния реверсора тяги турбореактивного двигателя, контрольное вычислительное устройство, - устройство управления реверсором, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления, устройство регулирования турбореактивного двигателя, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления. Объектами изобретения являются также способ контроля, применяемый в этой системе контроля, и летательный аппарат. 3 н. и 7 з.п. ф-лы, 2 ил.
1. Система (22) контроля, отличающаяся тем, что содержит:
- датчики (30) состояния реверсора тяги турбореактивного двигателя,
- контрольное вычислительное устройство (24),
- устройство (26) управления реверсором, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления,
- устройство (28) регулирования турбореактивного двигателя, управляемое вычислительным устройством в зависимости от данных, поступающих от датчиков в вычислительное устройство через устройство управления.
2. Система (22) по п.1, отличающаяся тем, что контрольное вычислительное устройство (24) выполнено с возможностью контроля электрического питания реверсора тяги.
3. Система (22) по п.1 или 2, отличающаяся тем, что контрольное вычислительное устройство (24) содержит блоки, выбранные из группы, в которую входят блок (46) контроля электрического питания реверсора тяги, блок (44) контроля изменения состояния реверсора тяги, блок (47) контроля регулирования турбореактивного двигателя.
4. Система (22) по п.1, отличающаяся тем, что датчики (30) состояния выполнены с возможностью передачи данных в устройство (28) регулирования.
5. Система (22) по п.1, отличающаяся тем, что устройство (28) регулирования выполнено с возможностью передачи данных о работе турбореактивного двигателя в вычислительное устройство (24).
6. Летательный аппарат (10), содержащий:
- по меньшей мере, один турбореактивный двигатель (18) с реверсором тяги (20),
- систему (22) по одному из пп.1-5, осуществляющую контроль турбореактивного двигателя.
7. Способ контроля турбореактивного двигателя, применяемый в системе по одному из пп.1-5, отличающийся тем, что содержит следующие этапы, на которых:
- передают данные о состоянии реверсора тяги датчиками (30) состояния в вычислительное устройство (24) через устройство (26) управления,
- осуществляют контроль устройства (26) управления вычислительным устройством (24) в зависимости от данных,
- осуществляют контроль устройства (28) регулирования вычислительным устройством (24) в зависимости от данных.
8. Способ по п.7, отличающийся тем, что дополнительно содержит этап контроля электрического питания реверсора тяги вычислительным устройством (24).
9. Способ по одному из пп.7 или 8, отличающийся тем, что дополнительно содержит этапы, на которых:
- передают данные о состоянии реверсора тяги датчиками состояния в устройство (28) регулирования,
- проверяют при помощи устройства (28) регулирования соответствие данных, полученных от датчиков состояния, с командой, полученной от вычислительного устройства (24).
10. Способ по одному из пп.7 и 8, отличающийся тем, что дополнительно содержит этап, на котором устройство (28) регулирования передает данные о работе турбореактивного двигателя в вычислительное устройство (24).
| Устройство для защиты от междуфазногоКОРОТКОгО зАМыКАНия B СЕТи пЕРЕМЕННО-гО TOKA | 1979 |
|
SU843089A1 |
| Устройство для автоматической пожарной защиты наземного резервуара для хранения нефтепродуктов и спиртов | 1987 |
|
SU1512627A1 |
| ЛИТИЧЕСКАЯ ПРОТЕАЗА AlpB БАКТЕРИИ Lysobacter sp. XLI, ФРАГМЕНТ ДНК, КОДИРУЮЩИЙ ЛИТИЧЕСКУЮ ПРОТЕАЗУ AlpB БАКТЕРИИ Lysobacter sp. XLI, И СПОСОБ ПОЛУЧЕНИЯ ЛИТИЧЕСКОЙ ПРОТЕАЗЫ AlpB БАКТЕРИИ Lysobacter sp. XLI | 2009 |
|
RU2408725C2 |
| US 3086360 А, 23.04.1963 | |||
| US 3321921 А, 30.05.1967 | |||
| УСТРОЙСТВО РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ПОВОРОТНЫМИ СТВОРКАМИ, СВЯЗАННЫМИ С УСТРОЙСТВОМ СИНХРОНИЗАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ | 1998 |
|
RU2151316C1 |
| RU 2003131386 А, 20.10.2003. | |||

