Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС).
В современных условиях наибольшую опасность представляют высокоскоростные малоразмерные цели, налет которых одновременно может осуществляться в достаточно широком азимутальном секторе. В связи с высокой скоростью этих целей время их нахождения в зоне возможного обнаружения и взятия на сопровождение минимально, поэтому их обнаружение и взятие на сопровождение необходимо производить еще на предельной дальности при их входе в зону действия РЛС, когда они находятся под малыми углами места, чтобы успеть в это время применить средства противовоздушной обороны. Пространственное положение этих целей меняется быстро и при механическом азимутальном обзоре, когда один период обращения антенны РЛС измеряется десятком секунд, высока вероятность срыва сопровождения и выход целей из зоны. Поэтому важнейшими требованиями, предъявляемыми к РЛС при ее работе по малоразмерным высокоскоростным целям в зоне малых углов места, являются обеспечение быстрого сканирования по азимуту, а из-за их малой отражающей поверхности - обеспечение высокого коэффициента усиления (Ку) антенны, что фактически становится невозможным при использовании только механического азимутального обзора.
Известен способ радиолокационного обзора пространства с помощью фазированной антенной решетки (ФАР), реализованный в РЛС 1Л121Е [История отечественной радиолокации под ред. А.С. Якунина, М., Изд. Дом «Столичная энциклопедия», с. 81], заключающийся в одномерном электронном сканировании по углу места и механическом - в азимутальной плоскости. Достоинство способа состоит в возможности быстрого программного изменения пределов обзора по углу места, а также то, что ФАР с одномерным электронным сканированием получили широкое применение благодаря относительной простоте их реализации. Недостаток известного способа состоит в том, что в нем не решена проблема быстрого сканирования по азимуту.
Известен наиболее близкий к первому и второму вариантам способ обзора пространства [патент РФ 2582067] «Способ радиолокационного обзора пространства», заключающийся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки.
Выбирая предпочтительное направление обзора, механически устанавливают в угломестной плоскости угол наклона ФАР из условия получения максимального значения коэффициента усиления антенны в этом направлении. Достоинством способа является использование быстрого электронного сканирования по углу места при обзоре пространства РЛС при максимальном значении коэффициента усиления антенны для всех углов места. Недостаток способа состоит в том, что он не решает проблему быстрого сканирования по азимуту.
Таким образом решаемой проблемой (техническим результатом) данного изобретения является обеспечение быстрого сканирования по азимуту и обеспечение высокого Ку антенны в широко распространенных РЛС с ФАР, имеющих одномерное электронное сканирование по углу места.
Проблема решается на основе поворота ФАР вокруг оси, перпендикулярной к ее плоскости, в процессе обзора пространства.
Техническая проблема (технический результат) по первому варианту решается тем, что в способе радиолокационного обзора пространства, заключающемся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки, согласно изобретению при обзоре азимутального сектора с наибольшей вероятностью появления скоростных и малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости.
Техническая проблема (технический результат) по второму варианту решается тем, что в способе радиолокационного обзора пространства, заключающемся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки, согласно изобретению, при обзоре азимутального сектора с наибольшей вероятностью появления скоростных и малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости, и выполняют дополнительно к механическому электронное сканирование в угломестной плоскости путем изменения несущей частоты зондирующего сигнала.
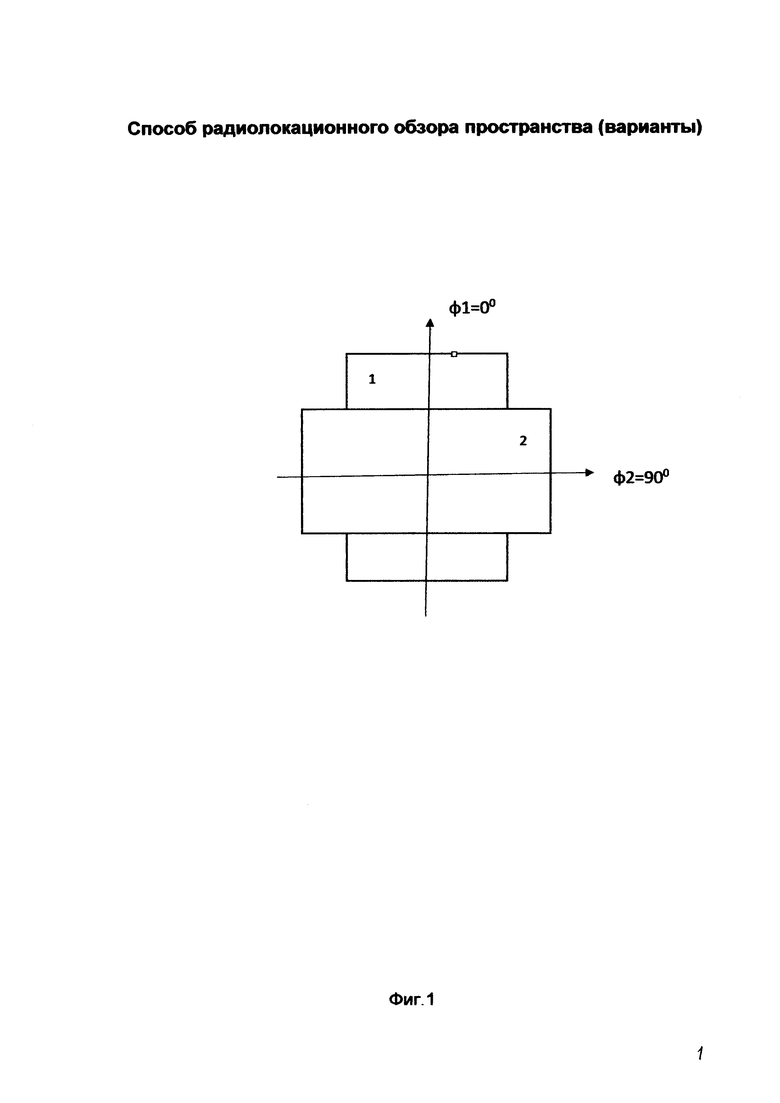
Изобретения иллюстрируются чертежом фиг. 1 и диаграммами фиг. 2.
На фиг. 1 показаны крайние положения ФАР - 1 до поворота и 2 после.
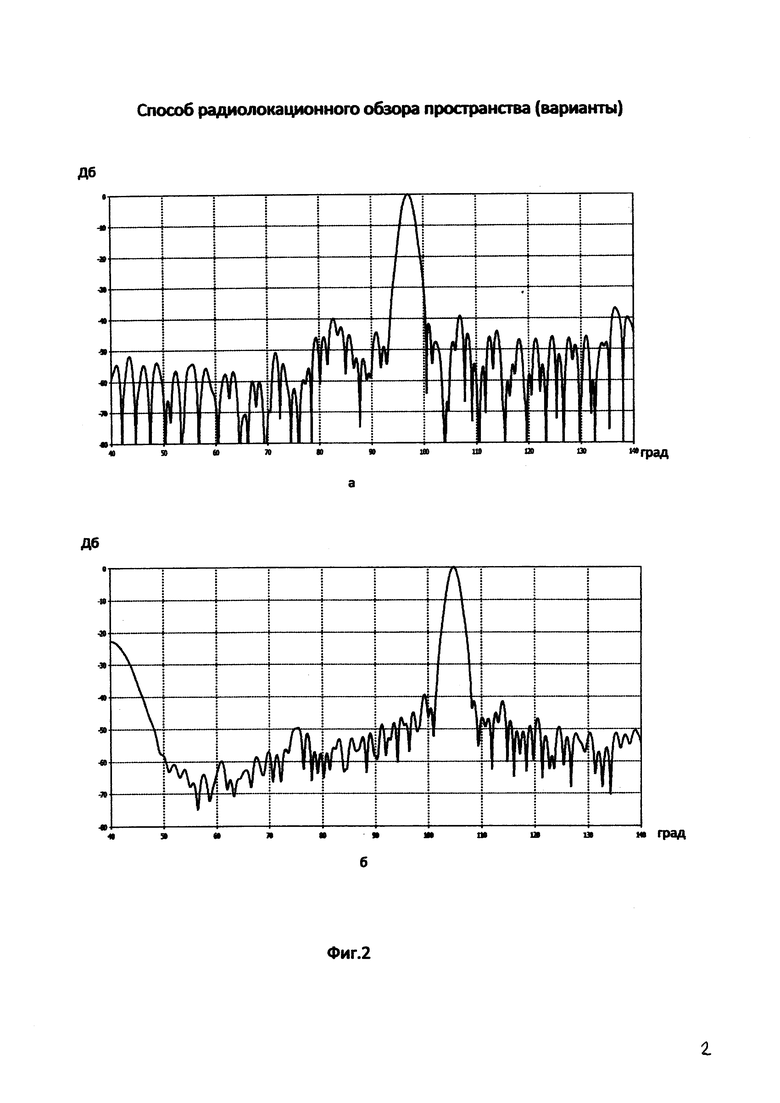
На фиг. 2а приведена расчетная диаграмма направленности антенны на частоте 3,2 ГГц, а на фиг. 2б - диаграмма направленности антенны на частоте 3,6 ГГц.
Способ по первому варианту работает следующим образом. В процессе кругового обзора пространства осуществляют механическое изменение направления луча антенны по азимуту за счет вращения антенны вокруг вертикальной оси, осуществляют электронное сканирование луча ФАР по углу места в области предпочтительных углов, выбираемых в процессе механического изменения направления луча антенны в угломестной плоскости для ускоренного осмотра секторов пространства в азимутальной плоскости с наибольшей вероятностью появления скоростных и малоразмерных целей поворачивают ФАР вокруг оси, перпендикулярной к плоскости ФАР, изменяют при этом плоскость электронного сканирования с угломестной на азимутальную при предпочтительном значении угла места. Предпочтительными углами места для обнаружения новых целей являются такие углы, в направлении которых наибольшая вероятность их появления; например, зона малых углов места (размерами, соизмеримыми с размерами луча ФАР), в которой прежде всего появляются цели при максимально достижимых высотах полета (например, ракет). При этом осуществляют механическое перемещение направления луча антенны для выбора предпочтительного угла места и азимутального сектора. Благодаря быстрому азимутальному сканированию при таком обзоре удается обеспечить высокий темп выдачи информации в выбранном достаточно широком азимутальном секторе, определяемом размерами электронного сканирования угломестного сектора при исходном положении ФАР. При этом только электронное сканирование в азимутальной плоскости обеспечивает надежное обнаружение и взятие на сопровождение таких целей в широком заданном азимутальном секторе при небольших значениях угла места.
Таким образом, решается поставленная проблема и достигается технический результат в первом варианте.
Способ по второму варианту работает следующим образом. В процессе кругового обзора пространства, так же как в первом варианте, осуществляют механическое изменение направления луча антенны по азимуту за счет вращения антенны вокруг вертикальной оси, осуществляют электронное сканирование луча ФАР по углу места в области предпочтительных углов, выбираемых в процессе механического изменения направления луча антенны в угломестной плоскости, для ускоренного осмотра секторов пространства в азимутальной плоскости поворачивают ФАР вокруг оси, перпендикулярной к плоскости ФАР, и осуществляют электронное сканирование в азимутальной плоскости при предпочтительном значении угла места и выполняют дополнительно электронное сканирование в угломестной плоскости путем изменения несущей частоты зондирующего сигнала. При изменении несущей частоты зондирующего сигнала происходит изменение направления луча (фиг. 2). Как видно из диаграмм (фиг. 2), полученных расчетным путем для ФАР из набора Ш-образных линеек [патент РФ №2049368]. При изменении частоты зондирующего сигнала на 12% луч отклоняется на 10°. Диаграммы рассчитывались на персональном компьютере с помощью программы MathCad. Этот способ дает возможность обеспечить электронное сканирование в широком азимутальном секторе и в небольшом угломестном, в котором прежде всего появляются цели на максимальных дальностях, что обеспечивает решение задачи обнаружения и взятие на сопровождение цели в секторе с наибольшей вероятностью появления скоростных малоразмерных целей (вероятный сектор ракетного направления).
Способ по второму варианту может быть использован там, где требуется высокий темп выдачи информации в широком азимутальном секторе и угломестном, с размером больше, чем ширина луча ФАР (обеспечивается способом по первому варианту).
Таким образом решается поставленная проблема и достигается технический результат во втором варианте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиолокационного обзора пространства | 2017 |
|
RU2642453C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638557C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582084C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2015 |
|
RU2582087C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС). Достигаемый технический результат - обеспечение быстрого сканирования по азимуту и обеспечение высокого коэффициента усиления антенны при гибком управлении перемещением луча антенны в широко распространенных РЛС с фазированной антенной решеткой (ФАР), имеющих одномерное электронное сканирование по углу места. Указанный технический результат по первому варианту достигается тем, что в способе радиолокационного обзора пространства, заключающемся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки при обзоре азимутального сектора с наибольшей вероятностью появления скоростных и малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости. Указанный технический результат по второму варианту достигается тем, что в способе радиолокационного обзора пространства, заключающемся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки при обзоре азимутального сектора с наибольшей вероятностью появления скоростных или малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости, и выполняют дополнительно к механическому электронное сканирование в угломестной плоскости путем изменения несущей частоты зондирующего сигнала. 2 н.п. ф-лы, 2 ил.
1. Способ радиолокационного обзора пространства, заключающийся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки (ФАР), отличающийся тем, что при обзоре азимутального сектора с наибольшей вероятностью появления скоростных и малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости.
2. Способ радиолокационного обзора пространства, заключающийся в электронном и механическом сканировании по углу места и механическом по азимуту с помощью фазированной антенной решетки (ФАР), отличающийся тем, что при обзоре азимутального сектора с наибольшей вероятностью появления скоростных или малоразмерных целей электронное сканирование перемещают в азимутальную плоскость путем поворота ФАР вокруг оси, перпендикулярной к ее плоскости, и выполняют дополнительно к механическому электронное сканирование в угломестной плоскости путем изменения несущей частоты зондирующего сигнала.
| ИЗМЕРЕНИЕ ИЗНОСА РЕМНЯ ПОСРЕДСТВОМ ОБНАРУЖЕНИЯ КРОМКИ В РАСТРОВОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2582067C2 |
| Прибор для определения периода колебаний моделей | 1960 |
|
SU146508A1 |
| SU 1087020 A1, 20.10.1996 | |||
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ОТНОСИТЕЛЬНО ГЕОМЕТРИЧЕСКОГО ЦЕНТРА РАСКРЫВА ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2008 |
|
RU2368987C1 |
| US 6456244 B1, 24.09.2002 | |||
| WO 2001069725 A1, 20.09.2001 | |||
| US 6147638 A, 14.11.2000). | |||

