Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС).
Важнейшими требованиями, предъявляемыми к РЛС, являются достаточный темп выдачи информации, получаемой в процессе обзора пространства, и способность гибкого управления сканированием луча антенны. В современных РЛС эти требования выполняют с помощью фазированной антенной решетки (ФАР).
Известен способ радиолокационного обзора пространства, принятый за прототип, реализованный в РЛС 5Н64 и 64Н6 (История отечественной радиолокации под ред. А.С. Якунина, М. Изд. дом «Столичная энциклопедия» - 2011 г., с. 293-295). Данный способ радиолокационного обзора пространства основан на поочередном осмотре зоны обзора сторонами двухсторонней фазированной антенной решетки в процессе ее вращения вокруг вертикальной оси и электронном сканировании по углу места и азимуту.
Известна радиолокационная станция для реализации способа обзора пространства, принятая за прототип, РЛС 5Н64 и 64Н6 (там же), содержащая двухстороннюю вертикально расположенную фазированную антенную решетку, выполненную с возможностью вращения вокруг вертикальной оси с двумерным электронным сканированием, а также механизм свертывания-развертывания, его подвижная часть связана с ФАР (Ж. Воздушно-космическая оборона №4, - 2003 г. «Радиолокационная станция кругового обзора 64Н6», - 7ой абзац сверху).
Способ и устройство работают следующим образом.
Двухстороннюю фазированную антенную решетку ФАР 1 (фиг. 1а) разворачивают из походного состояния с помощью подвижной части 3 механизма свертывания-развертывания 2, выполненного в виде гидроцилиндров, из горизонтального положения в вертикальное, фиксируют это положение, запитывают ФАР 1 оптически с помощью рупоров, вращают ФАР 1 в азимутальной β и в угломестной ε плоскостях. При этом, как известно (Справочник по радиолокации, под ред. Скольника. М.: Сов. Радио - 1977 г. Т. 2, с. 146 рис. 8, с. 193, рис. 45), коэффициент усиления (Ку) антенны зависит от угла направления луча антенны относительно нормали к плоскости ФАР 1. Ку антенны на прием, а также и на передачу уменьшается по косинусному закону, соответственно, уменьшается и дальность действия (D) РЛС (фиг. 1б). Рупоры включают поочередно с помощью электронного переключателя, что позволяет быстро изменять направление обзора на 180°, за счет этого в РЛС может быть увеличен темп обзора в два раза. В этом состоит достоинство наиболее близкого способа и РЛС для обзора пространства.
Недостаток наиболее близкого способа обзора пространства и РЛС состоит в достаточно малой зоне обзора по углу места вследствие того, что механизм свертывания-развертывания имеет только два фиксированных положения - свернуто или развернуто, при этом границы зоны обзора по углу места ±ε (фиг. 1б) определяются уменьшением величины Ку антенны до уровня, при котором D снижается до допустимого значения. Поэтому наиболее близкий способ радиолокационного обзора пространства имеет ограниченную и фиксированную (не подлежащую перемещению) зону обзора в угломестной плоскости.
Таким образом поставленной задачей (техническим результатом) является расширение угломестной зоны обзора или ее перемещения.
Задача решается на основе изменения наклона плоскости ФАР в процессе обзора.
Поставленная задача (технический результат) решается тем, что в способе радиолокационного обзора пространства, основанном на поочередном осмотре зоны обзора сторонами двухсторонней фазированной антенной решетки в процессе ее вращения вокруг вертикальной оси и электронном сканировании по углу места ε и азимуту β, согласно изобретению расширяют или перемещают угломестную зону обзора путем дополнительного механического сканирования луча ФАР по углу места, изменяя наклон плоскости ФАР относительно ее оси вращения.
Поставленная задача (технический результат) решается также тем, что расширяют или перемещают зону обзора по углу места путем изменения наклона плоскости ФАР относительно ее оси вращения на n≥1 дискретных значений углов наклона.
Поставленная задача (технический результат) решается также тем, что выбирают направление обзора путем поворота ФАР по азимуту, устанавливают заданный угол наклон ФАР относительно оси ее вращения, затем осуществляют секторный обзор с помощью электронного сканирования по азимуту и углу места.
Поставленная задача (технический результат) решается тем, что радиолокационная станция для осуществления способа обзора пространства, содержащая двухстороннюю фазированную антенную решетку, выполненную с возможностью вращения вокруг вертикальной оси и с двумерным электронным сканированием, а также механизм свертывания-развертывания, подвижная часть которого связана с ФАР, согласно изобретению ФАР и механизм свертывания-развертывания выполнены с возможностью в процессе работы РЛС изменять и измерять угол наклона ФАР.
Поставленная задача (технический результат) решается также тем, что введен измеритель угла наклона, он соединен с ФАР и обеспечивает возможность измерения ее угла наклона.
Поставленная задача (технический результат) решается так же тем, что в РЛС механизм свертывания-развертывания выполнен с возможностью дискретного изменения углов наклона ФАР с заранее установленными значениями углов.
Сущность заявляемых способа и РЛС заключается в следующем.
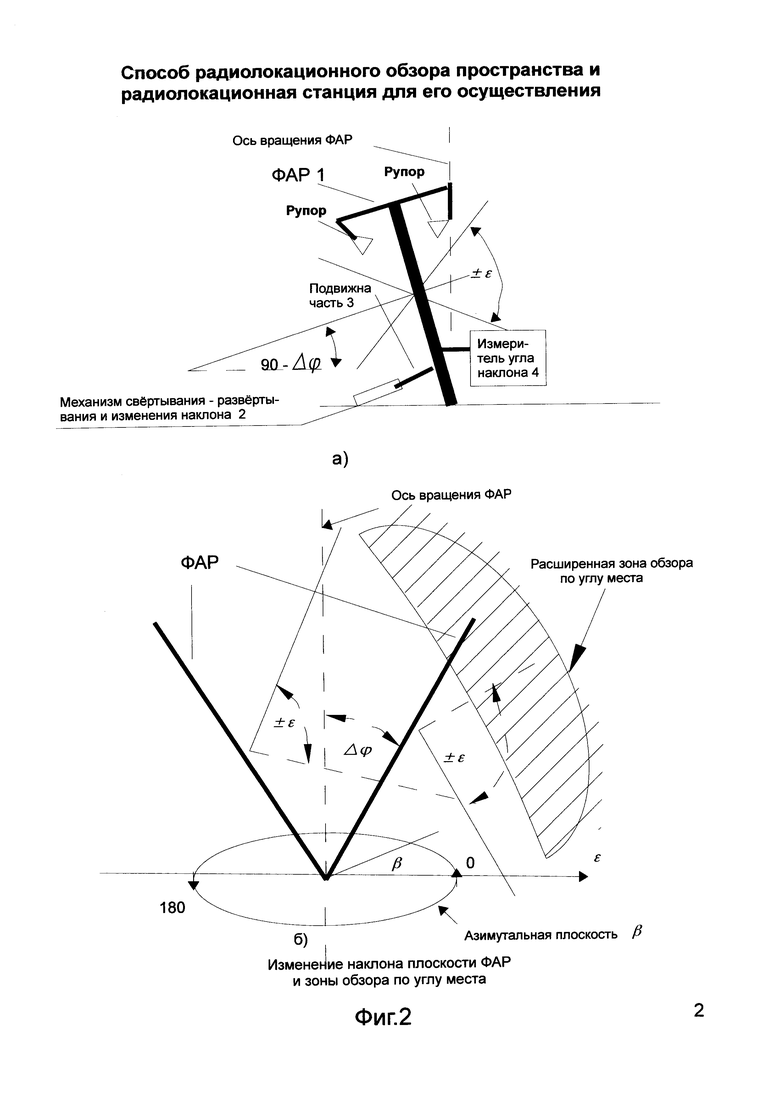
Двухстороннюю фазированную антенную решетку РЛС, как и в прототипе, развертывают с помощью механизма свертывания-развертывания (фиг. 2а), запитывают ФАР оптически с помощью рупоров, осуществляют механическое вращение в азимутальной плоскости β и электронное сканирование в угломестной плоскости ε и, дополнительно, электронное сканирование по азимуту. Рупоры включают поочередно с помощью электронного переключателя. Расширяют или перемещают зону обзора РЛС в угломестной плоскости ε благодаря тому, что механизм свертывания-развертывания выполнен с возможностью плавного или дискретного изменения угла наклона ФАР относительно оси вращения в пределах от 0° до Δφ (фиг. 2б). Угол наклона измеряют с помощью измерителя угла наклона, например с помощью микросхемы - акселерометра ADXL202 (Каталог «Импортные электронные компоненты». Раздел «Микросхемы»). Для увеличения зоны обзора по углу места на величину 2Δφ осуществляют наклон плоскости ФАР относительно ее оси вращения на угол Δφ. При этом одной стороной будет осуществляться обзор с высоким значением Ку антенны при больших углах места, а второй стороной при малых углах места. Такой режим работы обеспечивает расширение зоны обзора по углу места (фиг. 2б).
Применяют механизм свертывания-развертывания с дискретным изменением угла наклона ФАР с установкой на n≥1 фиксированных значений углов. При достаточном количестве фиксированных положений ФАР уменьшение Ку антенны в процессе электронного сканирования при значениях углов места, отличающихся от фиксированных значений, будет незначительным. В этом случае измерение (контроль) значений углов наклона ФАР не требуется, так как значения углов наклона заранее установлены и определяется номером дискретного положения угла наклона.
При секторном обзоре по азимуту и когда не требуется осмотр всей угломестной зоны, а требуется переход с одного направления осматриваемой зоны по углу места на другой, отличающийся на некоторую величину угла места, проводят обзор выбранного направления следующим образом. Первоначально ФАР РЛС устанавливается в центр заданного осматриваемого сектора по азимуту и путем механического сканирования по углу места выбирают предпочтительное направление и в этом положении осматривают заданный сектор с помощью электронного сканирования по азимуту и углу места. Предпочтительным направлением считают направление, в котором необходимо обеспечить максимальную дальность обнаружения.
Таким образом решается поставленная задача и достигается технический результат.
Изобретение иллюстрируется чертежами:
Фиг. 1 - диаграммы, поясняющие работу прототипа;
Фиг. 2 - диаграммы, поясняющие работу заявляемых способа и РЛС.
Заявленная РЛС (фиг. 2а) содержит ФАР 1, устройство свертывания-развертывания 2 с подвижной частью 3, измеритель угла наклона 4, подвижная часть 3 связана с одной стороны с ФАР 1, а с другой - с механизмом свертывания-развертывания 2, измеритель угла наклона 4 соединен с ФАР 1. Механизм развертывания 2 выполнен с возможностью изменения угла наклона ФАР либо плавно, либо дискретно.
Рассмотрим более подробно работу заявляемой РЛС, реализующей заявляемый способ (фиг. 2).
После развертывания ФАР 1 (фиг. 2а) и при необходимости расширения зоны обзора по углу места механизм свертывания-развертывания 2 с помощью подвижной части 3 осуществляет свертывание-развертывание ФАР 1 в пределах изменения угла ее наклона от 0° до Δφ, либо плавно, либо дискретно. Угол наклона ФАР 1 при плавном изменении угла определяют с помощью измерителя угла наклона 4. При этом осуществляют непрерывное вращение в азимутальной плоскости и электронное сканирование в двух плоскостях. Плавное изменение угла наклона осуществляют, например, путем чередования команд на свертывание и развертывание.
На (фиг. 2б) показано расширение зоны обзора по углу места в предлагаемом способе и устройстве с двухсторонней ФАР 1 в процессе изменения наклона ее плоскости с помощью механизма изменения наклона 2 и подвижной части 3. Как видно из диаграммы, в процессе изменения наклона ФАР 1 одна сторона расширяет верхнюю границу обзора по углу места, а вторая сторона расширяет нижнюю границу этой зоны. При этом происходит расширение зоны обзора по углу места по всем азимутальным направлениям.
При необходимости выбирают азимутальное направление, вращая ФАР, и перемещают зону обзора в предпочтительное угломестное направление путем изменения наклона плоскости ФАР относительно оси ее вращения. Затем с помощью электронного сканирования осуществляют секторный обзор по азимуту и углу места в этой зоне. Предпочтительным может быть любое направление, в котором необходимо иметь максимальную дальность обнаружения.
Таким образом, решается поставленная задача и достигается технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2015 |
|
RU2582087C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2642453C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638550C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638557C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 1979 |
|
RU2030760C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |

Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС). Достигаемый технический результат - расширение угломестной зоны обзора или ее перемещения. Указанный результат достигается тем, что в способе радиолокационного обзора пространства, основанном на поочередном осмотре зоны обзора сторонами двухсторонней фазированной антенной решетки в процессе ее вращения вокруг вертикальной оси и электронном сканированием по углу места ε и азимуту β, расширяют или перемещают угломестную зону обзора путем дополнительного механического сканирования луча фазированной антенной решетки (ФАР) по углу места, изменяя наклон плоскости ФАР относительно ее оси вращения. Указанный технический результат достигается также тем, что радиолокационная станция для осуществления способа обзора пространства, содержащая двухстороннюю фазированную антенную решетку, выполненную с возможностью вращения вокруг вертикальной оси и с двумерным электронным сканированием, а также механизм свертывания-развертывания, подвижная часть которого связана с ФАР, ФАР и механизм свертывания-развертывания выполнены с возможностью в процессе работы РЛС изменять и измерять угол наклона ФАР. 2 н. и 4 з.п. ф-лы, 2 ил.
1. Способ радиолокационного обзора пространства, основанный на поочередном осмотре зоны обзора сторонами двухсторонней фазированной антенной решетки в процессе ее вращения вокруг вертикальной оси и электронном сканированием по углу места и азимуту, отличающийся тем, что расширяют или перемещают угломестную зону обзора путем дополнительного механического сканирования луча ФАР по углу места, изменяя наклон плоскости ФАР относительно ее оси вращения.
2. Способ по п. 1, отличающийся тем, что расширяют или перемещают зону обзора по углу места путем изменения наклона плоскости ФАР относительно ее оси вращения на n≥1 дискретных значений углов наклона.
3. Способ по п. 1, отличающийся тем, что выбирают направление обзора путем поворота ФАР по азимуту, изменяют на заданный угол наклон ФАР относительно оси ее вращения, затем осуществляют секторный обзор с помощью электронного сканирования по азимуту и углу места.
4. Радиолокационная станция (РЛС) для осуществления способа обзора пространства, содержащая двухстороннюю фазированную антенную решетку (ФАР), выполненную с возможностью вращения вокруг вертикальной оси и с двумерным электронным сканированием, а также механизм свертывания-развертывания, подвижная часть которого связана с ФАР, отличающаяся тем, что ФАР и механизм свертывания-развертывания выполнены с возможностью в процессе работы РЛС изменять и измерять угол наклона ФАР.
5. РЛС по п. 4, отличающаяся тем, что введен измеритель угла наклона, он соединен с ФАР и обеспечивает возможность измерения ее угла наклона.
6. РЛС по п. 4, отличающаяся тем, что механизм свертывания-развертывания выполнен с возможностью дискретного изменения углов наклона ФАР с заранее установленными значениями углов.
| Справочник по радиолокации | |||
| Под ред | |||
| СКОЛНИКА М | |||
| Москва, Советское радио, 1977, т.2, с.146, рис.8, с.193, рис.45 | |||
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| ТРЕНАЖЕР МНЕМОСХЕМ | 1990 |
|
RU2101772C1 |
| JP 2008197034 A, 28.08.2008 | |||
| Устройство для уборки вырезанных из забоя блоков к камнерезной машине | 1984 |
|
SU1229347A1 |
| US 20110291890 A1, 01.12.2011. | |||

