Изобретение относится к методам радиолокационного обнаружения воздушных объектов (ВО) и в частности - к методам обнаружения беспилотных летательных аппаратов (БЛА) с малой радиолокационной заметностью.
Известен традиционный (типовой) способ обнаружения воздушных объектов, в том числе и БЛА, заключающийся в излучении в пространство с помощью активной радиолокационной станции (РЛС) импульсных зондирующих сигналов, отражении их от ВО, приеме отраженных сигналов антенной системой РЛС, фильтрации отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, сравнении отфильтрованных отражений с порогом и в случае превышения установленного порога - принятии решения о том, что обнаружен движущийся ВО [1-3].
Данный способ используется в большинстве РЛС старого парка и обладает тем недостатком, что достоверное обнаружение возможно только в случае отражений электромагнитных волн (ЭМВ) от типовых объектов с эффективной площадью рассеяния (ЭПР) порядка единиц квадратных метров. В случае же отражения ЭМВ от БЛА, ЭПР которых может составлять от десятых до сотых или тысячных долей квадратного метра, мощности отраженных сигналов для превышения порога обнаружения не хватает, и обнаружение таких объектов невозможно.
Известен также способ обнаружения малозаметных ВО, в том числе и БЛА, предполагающий в отличие от описанного выше способа накопление отражений от ВО, полученных в разных периодах повторения импульсов РЛС [4].
Способ обнаружения воздушных объектов, в том числе и БЛА, заключается в повышении частоты повторения импульсов Fи (снижении величины периода повторения импульсов Ти) до такой величины, чтобы при заданной скорости вращения антенны РЛС, то есть при заданной скорости обзора воздушного пространства минимальное число импульсов Nи мин, принимаемых после отражения от ВО, было достаточным для обнаружения малозаметного ВО с заданной вероятностью. При выборе повышенной частоты повторения импульсов Fи используют выражение [4, с. 71-72, 89-90]

где Δβ и Δε - величины секторов обзора пространства по азимуту β и углу места ε; Тобз - период обзора пространства; Θβ0,5 и Θε0,5 - ширина диаграммы направленности антенны (ДНА) в азимутальной и угломестной плоскостях по уровню половинной мощности.
В РЛС кругового обзора сканирования по углу места ε не производится, то есть Δε=Θε0,5, вследствие чего для выбора частоты повторения Fи можно использовать упрощенное выражение

Согласно описываемому способу излучают в пространство с помощью РЛС импульсные зондирующие сигналы с повышенной частотой повторения импульсов Fи, принимают отраженные от ВО сигналы антенной системой РЛС, проводят фильтрацию отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, когерентно суммируют Nи мин отраженных отфильтрованных сигналов, сравнивают результат суммирования с порогом и в случае превышения установленного порога принимают решение о том, что обнаружен движущийся ВО. Когерентное суммирование сигналов предполагает их сложение по амплитуде с учетом фазы. Отраженные от ВО сигналы в пределах интервала Тк когерентности (5 мс) синфазны, а шумы в каждый момент времени имеют случайную фазу. Поэтому результат суммирования полезных отраженных от ВО сигналов всегда превышает результат суммирования шумов, что приводит к улучшению характеристик обнаружения [1-4]. Когерентное суммирование (то есть накопление или сложение) отраженных сигналов позволяет при использовании данного способа превысить порог обнаружения даже в случае малой отражающей способности ВО. Некогерентное накопление отраженных сигналов предполагает сложение их только по амплитуде без учета фазы. На каждом отсчете дальности отраженные сигналы каждого периода повторения имеют определенную значащую амплитуду, а шумы вследствие случайного распределения имеют в каждом отсчете дальности то возрастающую, то убывающую амплитуду. Поэтому в отсчетах дальности с полезными отраженными сигналами сложение одноэлементных (принадлежащих одному и тому же элементу дальности) сигналов приводит в общем случае к большему результату, чем в отсчетах, содержащих только шумовые составляющие. Когерентное сложение более продуктивно, но ограничено по времени интервалом когерентности Тк. Некогерентное накопление может проводиться гораздо длительнее некогерентного и ограничено только влиянием радиальной скорости ВО, которая обуславливает изменение положения отраженного сигнала на оси дальности (времени).
Указанный способ обнаружения лучше типового, но не позволяет эффективно обнаруживать малозаметные БЛА, поскольку отсутствует какой-либо метод или методика по установлению необходимого числа накапливаемых импульсов Nи мин в условиях непредсказуемого снижения радиолокационной заметности ВО (БЛА). К тому же в современных РЛС обнаружения число когерентно накапливаемых импульсов не превышает 100, чего может быть недостаточно для обнаружения малоотражающих малоразмерных БЛА.
Известен еще один способ обнаружения БЛА [4, с. 90], при котором когерентное накопление необходимого числа импульсов достигается не только увеличением частоты повторения Fи, но и снижением угловой скорости вращения антенны РЛС. Если знать или задать допустимое число импульсов, сложение энергии которых обеспечивает надежное обнаружение БЛА с вероятностью не ниже требуемой, то для числа na оборотов антенны РЛС за одну минуту по азимуту, согласно [4, с. 90] для обеспечения требуемого результата накопления должно выполняться неравенство

Чем больше требуемое (необходимое) число Nи мин накапливаемых отраженных импульсов, тем ниже должна быть скорость вращения антенны. Поэтому способ обнаружения ВО (БЛА) предполагает снижение скорости обзора воздушного пространства за счет замедления скорости вращения антенны в секторах, где предполагается наличие слабоотражающих ВО, в том числе и БЛА. Если же таковые секторы не определены особенностями обстановки или наличием предполагаемых направлений появления БЛА, то скорость вращения уменьшается для всех азимутальных направлений, т.е. устанавливается низкой для полного кругового обзора. В этом случае сектор снижения угловой скорости вращения составляет 360°. Реально наиболее опасное направление появления БЛА является известным. Если таких направлений несколько, то обнаружение в таких секторах проводится одинаковым способом. В остальном же способ обнаружения придерживается традиционных принципов.
Таким образом, указанный способ обнаружения воздушных объектов, в том числе и БЛА, заключается в следующем. Умышленно одновременно снижают по величине два параметра РЛС, а именно уменьшают период повторения импульсов Ти и снижают скорость вращения ωβ антенны РЛС по азимуту β до такой величины, чтобы число импульсов Nи мин, суммируемых (когерентно или некогерентно) после отражения от ВО, было достаточным для обнаружения малозаметного БЛА с заданной вероятностью. Согласно этому способу традиционно в процессе замедленного вращения антенны по азимуту в секторе (секторах) предполагаемого появления БЛА излучают в пространство с помощью РЛС импульсные зондирующие сигналы (с повышенной частотой повторения импульсов Fи), принимают отраженные от ВО сигналы антенной системой РЛС, проводят фильтрацию отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, суммируют Nи мин отраженных отфильтрованных сигналов, сравнивают результат суммирования с порогом, и в случае превышения установленного порога принимают решение о факте обнаружения движущегося ВО, который может быть в том числе и беспилотным летательным аппаратом.
Известен также радиолокационный способ обнаружения БЛА с малой радиолокационной заметностью, описанный в [5]. Он заключается в том, что в активной радиолокационной станции обнаружения (АРЛСО) снижают по величине период повторения импульсов Ти и скорость вращения ωβ антенны по азимуту в азимутальном секторе, биссектриса которого является предполагаемым направлением несанкционированного появления беспилотных летательных аппаратов, причем уменьшение угловой скорости ωβ вращения антенны и периода повторения импульсов Ти проводят до достижения предельно малых величин, при которых сохраняется возможность однозначно определять координаты воздушных объектов и осуществлять обзор воздушного пространства за допустимое время. Согласно способу [5] заблаговременно запускают в направлении предполагаемого несанкционированного появления представляющих интерес БЛА с малой отражательной способностью вспомогательный беспилотный летательный аппарат обнаружения (БЛАО) с пассивным работающим на прием радиолокатором, работающим на той же несущей частоте, что и АРЛСО, оснащая БЛАО фазированной антенной решеткой (ФАР), позволяющей управлять азимутальным направлением основного лепестка ее диаграммы направленности (ДН). Дальность нахождения БЛАО выбирают на 1-2 км меньшей, чем дальняя граница зоны обнаружения АРЛСО, то есть чем ее максимальная приборная дальность, на которой предполагается обнаруживать БЛА, совершающие несанкционированные полеты.
Конструктивно предусматривают наличие постоянной устойчивой радиосвязи БЛАО с активной РЛС обнаружения. Посредством этой радиосвязи с помощью управляющих сигналов активной РЛС обнаружения управляют траекторией полета БЛАО. С помощью передаваемых от АРЛСО на борт БЛАО управляющих сигналов синхронизируют угловое направление основного лепестка ДН излучающей зондирующие сигналы АРЛСО с угловым направлением основного лепестка ДН принимающей отраженные сигналы антенны БЛАО. В перерывах между управляющими сигналами АРЛСО с борта БЛАО передают на АРЛСО контрольные сигналы о координатах местоположения БЛАО. В процессе замедленного вращения по азимуту антенны АРЛСО излучают в пространство с помощью ее антенной системы импульсные зондирующие сигналы с уменьшенным периодом повторения импульсов Ти.
Принимают антенной беспилотного летательного аппарата обнаружения и антенной АРЛСО от каждого импульсного объема отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся воздушных объектов на фоне отражений от неподвижных местных предметов. Суммируют полученное число отраженных отфильтрованных сигналов для каждого импульсного объема АРЛСО и каждого импульсного объема бортового пассивного радиолокатора БЛАО. Сравнивают результат суммирования сигналов в каждом импульсном объеме БЛАО с установленным для него порогом П1 обнаружения беспилотных летательных аппаратов с малой отражательной способностью, в случае превышения установленного порога П1 на борту БЛАО принимают решение о том, что в соответствующем импульсном объеме радиолокатора БЛАО обнаружен движущийся воздушный объект. Одновременно сравнивают результат суммирования сигналов в каждом импульсном объеме АРЛСО с установленным для нее порогом П2 обнаружения воздушных объектов, в случае превышения просуммированным сигналом установленного порога П2 на борту АРЛСО принимают решение о том, что в соответствующем импульсном объеме обнаружен движущийся воздушный объект. Таким объектом может быть самолет, воздушный шар, ракета, дирижабль, вертолет, БЛА и т.д. Определяют дальностную и азимутальную координаты каждого ВО, обнаруженного активной РЛС обнаружения и пассивным радиолокатором БЛАО, координаты дальности и азимута каждого обнаруженного ВО передают с борта БЛАО по линии радиосвязи на борт АРЛСО.
Проводят отождествление воздушных объектов, обнаруженных активной РЛС и пассивным радиолокатором БЛАО, путем сравнения координат обнаруженных воздушных объектов. По результатам совпадения координат обнаруженных ВО с точностью до размеров строба отождествления принимают окончательное решение о принадлежности обнаруженного ВО к беспилотным летательным аппаратам с малой отражательной способностью с использованием правила: если координаты ВО, обнаруженного беспилотным летательным аппаратом обнаружения, не совпадают с координатами воздушных объектов, обнаруженных активной РЛС обнаружения, то этот воздушный объект, обнаруженный БЛАО, относят к беспилотным летательным аппаратам с малой отражательной способностью.
Описанному выше способу свойственны следующие недостатки.
Способ обеспечивает обнаружение БЛА только в узком азимутальном секторе (единицы-десятки градусов) и может быть применим только при наличии достоверной информации о направлении подлета беспилотных аппаратов, что является проблематичным. Как правило, направление подлета БЛА известно лишь приблизительно и носит вероятностный характер, что снижает эффективность способа. К тому же способ не предполагает сканирования диаграммой направленности радиолокатора БЛАО по углу мета, то есть применим в узком диапазоне высот. Поэтому слабоотражающие малозаметные воздушные объекты с траекторией движения выше или ниже основного угломестного лепестка ДНА радиолокатора БЛАО не могут быть обнаружены. И наконец, способ имеет ограничения по интенсивности отраженных сигналов, вследствие чего БЛА с низкой ЭПР особенно на атакующих ракурсах (курсовой угол близок к нулю) будут обнаруживаться с низкой вероятностью.
Известен также радиолокационный способ обнаружения БЛА [6], который включает следующие последовательно выполняемые операции:
На основании сведений о возможных направлениях несанкционированного подлета БЛА назначают положение и величину широкого азимутального сектора обнаружения БЛА, перекрывающего все такие направления. Выбранную величину ШАС увеличивают до значения  где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°. Узкие азимутальные секторы обнаружения назначаются и являются смежными, то есть примыкающими по азимуту друг к другу. Число S УАС определяют по формуле
где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°. Узкие азимутальные секторы обнаружения назначаются и являются смежными, то есть примыкающими по азимуту друг к другу. Число S УАС определяют по формуле  Ceil(*) - операция округления числа * до следующего целого;
Ceil(*) - операция округления числа * до следующего целого;  - начальное значение азимутальной протяженности ШАС. В назначенном ШАС обнаружения уменьшают период повторения импульсов Ти и скорость вращения ωβ антенны АРЛСО по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты ВО и осуществлять обзор воздушного пространства за допустимое время.
- начальное значение азимутальной протяженности ШАС. В назначенном ШАС обнаружения уменьшают период повторения импульсов Ти и скорость вращения ωβ антенны АРЛСО по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты ВО и осуществлять обзор воздушного пространства за допустимое время.
Заблаговременно запускают в каждом УАС в направлении предполагаемого появления представляющих интерес БЛА с малой отражательной способностью (то есть в направлении дальней границы обнаружения АРЛСО) по биссектрисе соответствующего УАС БЛАО с пассивной работающей только на прием радиолокационной станцией, функционирующей на той же несущей частоте, что и основная АРЛСО. Каждый из S БЛАО оснащают одинаковой по конструкции пассивной приемной фазированной антенной решеткой (ФАР), способной управлять азимутальным и угломестным положением основного лепестка ее диаграммы направленности. Высоты полета всех БЛАО устанавливают одинаковыми.
Дальность нахождения (барражирования) БЛАО в каждом УАС выбирают на 1-2 км меньшей, чем дальняя граница зоны обнаружения РЛС, то есть максимальная приборная дальность АРЛСО, на которой предполагается обнаруживать БЛА, совершающие несанкционированные полеты.
Конструктивно предусматривают наличие постоянной устойчивой радиосвязи каждого s-го БЛАО с основной АРЛСО. Посредством этой связи с помощью управляющих сигналов АРЛСО управляют траекторией полета и местонахождением соответствующего s-го БЛАО. С помощью передаваемых на борт соответствующего s-го БЛАО управляющих сигналов АРЛСО синхронизируют угловое азимутальное направление основного лепестка излучающей зондирующие сигналы антенны АРЛСО с угловым направлением основного лепестка диаграммы направленности принимающей отраженные сигналы ФАР s-го БЛАО. Иначе говоря, синхронизируют азимутальное направление основного лепестка антенны АРЛСО с азимутальным направлением основного лепестка принимающей отраженные сигналы ФАР БЛАО.
Для организации двусторонней связи между БЛАО и АРЛСО для каждого s-го БЛАО устанавливают свой интервал приема ΔТпрмs и передачи ΔТпрдs информации, величину которых рассчитывают по формулам

где Тпрм - весь временной цикл приема информации бортовыми средствами связи БЛАО; Тпрд - весь временной цикл передачи информации с бортов БЛАО на борт АРЛСО.
В перерывах между управляющими сигналами АРЛСО в интервале передачи информации ΔТпрдs с борта s-го БЛАО передают на АРЛСО контрольные сигналы о координатах местоположения s-го БЛАО, то есть обеспечивают постоянную передачу с борта s-го БЛАО на АРЛСО информации о точных координатах местонахождения s-го БЛАО.
В процессе замедленного вращения антенны АРЛСО по азимуту в пределах ШАС излучают в пространство с помощью антенной системы АРЛСО импульсные зондирующие сигналы с уменьшенным периодом повторения импульсов Ти.
По линиям радиосвязи сообщают всем вспомогательным БЛАО координаты секторного БЛАО, принадлежащего тому узкому азимутальному сектору, в котором в определенный период будет находиться лепесток ДНА АРЛСО, а также границы временного интервала ΔTs ожидаемого нахождения лепестка ДНА АРЛСО в пределах этого s-го УАС с секторным БЛАО.
При нахождении лепестка ДНА АРЛСО в каком-либо s-м УАС все остальные узкие азимутальные сектора нумеруют по ходу часовой стрелки, то есть по направлению вращения антенны АРЛСО от нуля до J (J=S-1). Диаграммы направленности антенн пассивных ФАР вспомогательных БЛАО в период ΔTs направляют на s-й секторный (для периода ΔTs) БЛАО. Самому раннему при движении основного лепестка ДНА АРЛСО по часовой стрелке из вспомогательных БЛАО с номером j=0 устанавливают угломестное положение его диаграммы направленности ФАР равное угломестному положению ДН ФАР секторного БЛАО εсект, то есть устанавливают горизонтальное угломестное положение его ДН, так как высоты всех БЛАО являются равными. Остальным j-м вспомогательным (сторонним) БЛАО устанавливают угломестные положения ДН ФАР, вычисляемые по формуле

где Round(*) - операция округления числа * до целого; Ксм - коэффициент смещения угломестного лепестка ДНА БЛАО в долях ширины его угломестной ДНА Θε0,5 по уровню половинной мощности, выбираемый заблаговременно экспериментальным или расчетным путем и равный, например, Kсм=0,2.
Принимают фазированной антенной решеткой каждого s-го БЛАО и антенной АРЛСО от каждого импульсного объема (элемента разрешения по дальности и азимуту) отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, суммируют полученное число (Nи мин) отраженных отфильтрованных импульсных сигналов для каждого импульсного объема бортового пассивного радиолокатора каждого БЛАО и АРЛСО.
Сравнивают результат суммирования сигналов в каждом импульсном объеме БЛАО с установленным для БЛАО порогом П1 обнаружения БЛА с малой отражательной способностью. В случае превышения установленного порога П1 на борту БЛАО принимают решение о том, что в соответствующем импульсном объеме радиолокатора БЛАО обнаружен движущийся ВО. Определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема.
Сравнивают результат суммирования сигналов в каждом импульсном объеме АРЛСО с установленным для АРЛСО порогом П2 обнаружения типовых ВО. В случае превышения установленного порога П2 на борту АРЛСО принимают решение о том, что в соответствующем импульсном объеме обнаружен движущийся типовой ВО. Определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема АРЛСО.
Координаты дальности и азимута каждого обнаруженного ВО передают с борта каждого БЛАО по линии радиосвязи на борт АРЛСО.
Проводят отождествление ВО, обнаруженных активной РЛС обнаружения и пассивными радиолокаторами БЛАО, путем сравнения координат объектов, обнаруженных разными радиолокаторами, то есть основной АРЛСО и пассивными радиолокаторами БЛАО. По результатам совпадения координат с точностью до размеров строба отождествления принимают окончательное решение об обнаружении, то есть решение о принадлежности обнаруженного любым из БЛАО воздушного объекта к БЛА с малой отражательной способностью. При этом придерживаются следующего правила: если координаты ВО, обнаруженного БЛАО, не совпадают с координатами ВО, обнаруженных АРЛСО, то принимают решение о том, что обнаруженный ВО является БЛА с малой радиолокационной заметностью (с малой отражательной способностью). В остальных случаях обнаруженные ВО относят к типовым.
Описанный способ обнаружения БЛА имеет следующий недостаток. Интенсивность рассеянных слабоотражающими беспилотными летательными аппаратами сигналов в соответствии с утверждениями из [7, с. 19-21, 8] при приеме с боковых направлений слабее интенсивности рассеянных сигналов, принимаемых с задних ракурсов (при курсовых углах приема более 100°). Это может привести к тому, что для одних и тех же БЛА интенсивность приема сигналов с боковых направлений, как того требует способ [6], может оказаться недостаточной для обнаружения, в то время как с задних ракурсов интенсивность отражений будет обеспечивать качественное обнаружение.
Задачей изобретения является разработка усовершенствованного способа обнаружения БЛА с более высокими характеристиками за счет приема рассеянных сигналов в задней полусфере по отношению к объекту обнаружения.
Для решения задачи изобретения предлагается выделить в пределах широкого азимутального сектора (ШАС) зону обнаружения в виде полосы (фиг.1), дальняя граница 3 которой соответствует приборной дальности обнаружения АРЛСО 1, а радиальная протяженность составляет величину 1 км. При этом для приема сигналов от ВО, преодолевающих указанную полосу обнаружения в пределах ШАС, БЛАО 2 предлагается размещать в пределах соответствующих узких азимутальных секторов (УАС) на дальностях, превышающих дальнюю границу АРЛСО на 3 км. Причем располагать БЛАО предлагается на азимутальных биссектрисах соответствующих УАС (см. фиг.1). В каждом УАС применяется по одному БЛАО. Высоты полета всех БЛАО устанавливают одинаковыми и соответствующими среднестатистическим высотам полета ожидаемых БЛА с несанкционированными траекториями.
Будем БЛАО, проводящий обнаружение в своем УАС в соответствии с способом [6], называть секторным. Остальные БЛАО, проводящие обнаружение в каком-либо УАС, находясь при этом в иных узких азимутальных секторах, условимся называть вспомогательными. По мере углового перемещения основного лепестка (луча) ДНА активной РЛС обнаружения каждый БЛАО будет становиться секторным в период нахождения лепестка ДНА АРЛСО в его УАС. Когда лепесток (луч) ДНА АРЛСО находится в другом УАС, соответствующий БЛАО играет роль вспомогательного.
Полученные в результате пересечения границ полосы обнаружения и границ УАС кольцевые (так как это части кольца) секторы 4 (фиг.1) предлагается назвать дальностно-азимутальными секторами (ДАС). На фиг.1 имеется пять таких ДАС 4, которые можно пронумеровать как и соответствующие УАС (величиной Δβуас) индексами s, где  S - число используемых УАС, слева направо по ходу вращения антенны АРЛСО 1 с угловой скоростью ωβ. В данном примере число УАС S=5, но их может быть и другое количество в зависимости от величины ШАС Δβшас. Обнаруживаемый БЛА 5 находится на фиг.1 в пределах первого s=1 ДАС 4.
S - число используемых УАС, слева направо по ходу вращения антенны АРЛСО 1 с угловой скоростью ωβ. В данном примере число УАС S=5, но их может быть и другое количество в зависимости от величины ШАС Δβшас. Обнаруживаемый БЛА 5 находится на фиг.1 в пределах первого s=1 ДАС 4.
Обнаружение малозаметных БЛА предлагается проводить при их нахождении в соответствующих дальностно-азимутальных секторах.
Находящиеся на удалении 3 км от дальней границы зоны обнаружения БЛАО аналогично прототипу [6] предлагается привлекать для обнаружения несанкционированных БЛА в пределах всех ДАС, поскольку ракурс полета БЛА и индивидуальные особенности планеров априори неизвестны, вследствие чего интенсивность рассеянного сигнала для ракурса γ=170° может оказаться выше, чем для ракурса 180° (γ - угол между направлением падения электромагнитной волны на ВО и направлением приема рассеянного сигнала, то есть угол между направлениями на передатчик и на приемник из точки нахождения объекта рассеяния радиоволн).
Диаграммы направленности пассивных приемных ФАР секторного и вспомогательных БЛАО предлагается направлять по азимуту на геометрический центр ДАС, в котором проводится обнаружение. А именно - при нахождении ДНА АРЛСО в s-м УАС все вспомогательные БЛАО, имеющие разные угломестные положения ДНА пассивных ФАР, предлагается направлять по азимуту на s-й ДАС в интересах приема сигналов, рассеянных находящимися в s-м ДАС воздушными объектами, в том числе и БЛА.
Согласно способу предлагается по линиям радиосвязи сообщать секторному и всем вспомогательным БЛАО координаты геометрического центра ДАС, принадлежащего тому узкому азимутальному сектору, в котором в определенный период будет находиться лепесток ДНА АРЛСО, а также границы временного интервала ΔTs ожидаемого нахождения лепестка ДНА АРЛСО в пределах этого s-го УАС с секторным БЛАО.
При нахождении лепестка ДНА АРЛСО в каком-либо s-м УАС все остальные узкие азимутальные сектора, а также соответствующие ДАС и вспомогательные БЛАО нумеруют по ходу часовой стрелки (то есть по направлению вращения антенны АРЛСО) от единицы до J (J=S-1). Если БЛАО находится, к примеру, во втором УАС, а ДНА АРЛСО - в третьем, то второй УАС, соответствующий ему (находящийся в нем) ДАС и соответствующий ему (находящийся в нем) БЛАО будут иметь номер j=2. Секторный ДАС и секторный БЛАО индексом j не нумеруются. Диаграммы направленности антенн пассивных ФАР секторного и всех вспомогательных БЛАО в период ΔTs направляют по азимуту на s-й ДАС (для периода ΔTs), так чтобы биссектриса азимутальной ДН пересекала геометрический центр s-го ДАС.
Секторному БЛАО определяют горизонтальное положение его ДН в угло-местной плоскости. А каждому j-му вспомогательному БЛАО устанавливают угломестное положение его диаграммы направленности ФАР, вычисляемое по формуле

где Ксм - коэффициент смещения угломестного лепестка ДНА БЛАО по углу места в долях ширины его угломестной ДНА Θε0,5 по уровню половинной мощности, выбираемый заблаговременно экспериментальным или расчетным путем и равный, например, Ксм=0,2.
При таком распределении ДН s-x БЛАО по углу места они перекроют пространственные объемы обнаружения на высотах выше и ниже высоты просмотра пространства диаграммой направленности секторного БЛАО. С увеличением номера j вспомогательного БЛАО отклонение его угломестной ДН от горизонтального положения будет увеличиваться, и просмотр зоны обнаружения будет проводиться на измененной высоте.
Положение ДНА вспомогательных БЛАО в угломестной плоскости предлагается изменять по мере изменения нумерации ДАС (УАС) в соответствии с выражением (6) при изменении положения ДАС, в котором находится лепесток ДН АРЛСО и производится обнаружение ВО, то есть при изменении азимутального положения основного лепестка ДН АРЛСО.
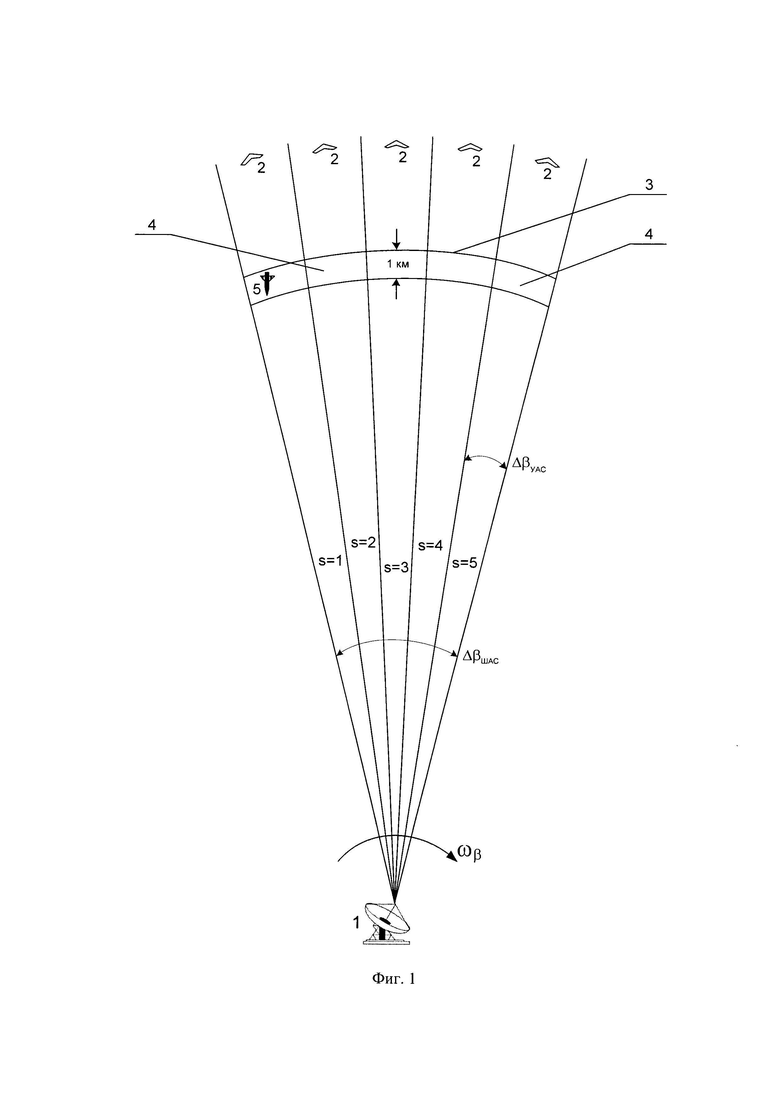
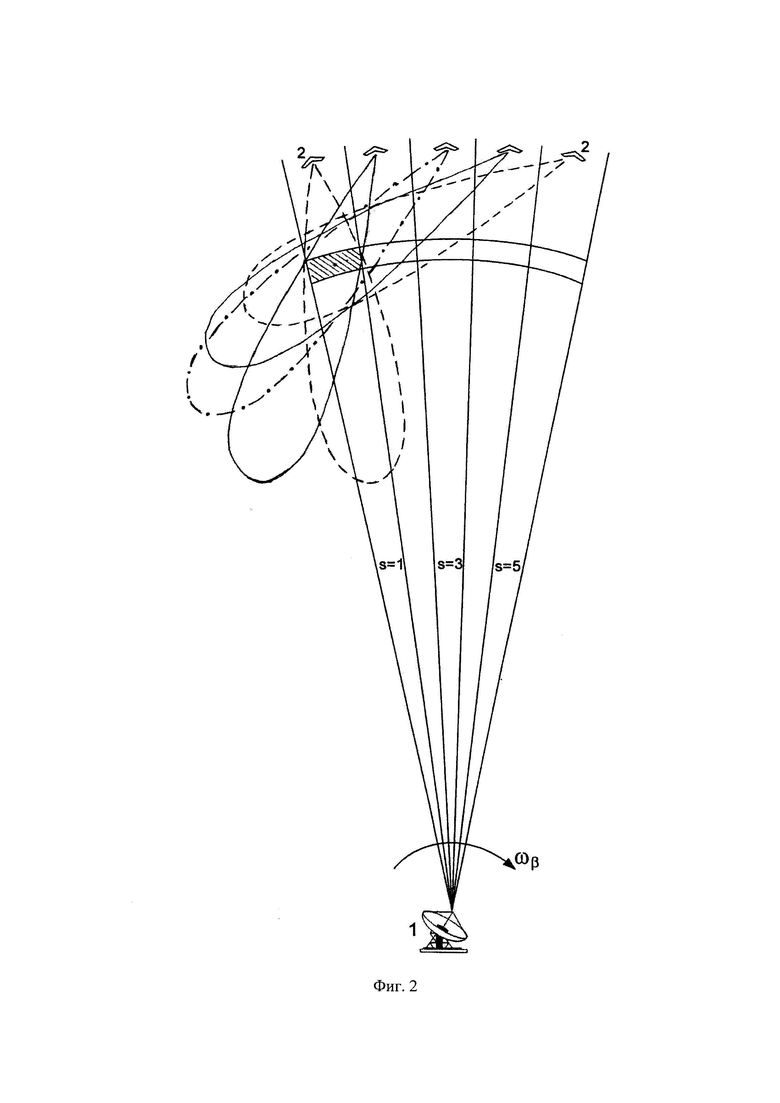
На фиг.2 показано азимутальное положение ДНА вспомогательных БЛАО при нахождении ДН АРЛСО в первом слева (s=1) УАС.Используемый при этом первый ДАС выделен штриховкой (заштрихован). Все вспомогательные БЛАО развернули свои ДН в плоскости азимута в направлении указанного первого ДАС. Луч ДНА АРЛСО 1, вращаясь по азимуту с угловой скоростью ωβ, последовательно занимает соответствующие ДАС, на которые в эти моменты перенаправляются азимутальные ДН пассивных ФАР вспомогательных БЛАО. Так на фиг.3 показаны положения ДН ФАР вспомогательных БЛАО при нахождении луча ДН АРЛСО в третьем при отсчете слева ДАС (s=3).
Использование ДН вспомогательных БЛАО с разными углами места обусловлено необходимостью проведения обнаружения на различных высотах, что при равенстве высот полета БЛАО обеспечивается разными углами места ДН их антенных систем (ФАР). На фиг.4 показано положение ДН вспомогательных БЛАО в угломестной плоскости при обнаружении ВО в пределах второго ДАС (s=2). Диаграмма направленности секторного БЛАО 2.2. на фиг.4 не демонстрируется. Она имеет в соответствии с правилом из [6] горизонтальное положение. Рассматривается случай использования пяти БЛАО (число УАС S=5). Второй БЛАО 2.2 является секторным, принадлежащим тому УАС, в котором расположен соответствующий ДАС, в пределах которого ведется обнаружение. Азимутальные плоскости, ограничивающие второй ДАС, образуют полосу 6 (фиг.4). Первый (для него j=1) вспомогательный БЛАО 2.1 имеет ДН вида 2.1.А. Вспомогательный БЛАО 2.3 (для него j=2) имеет ДН вида 2.3А. Она показана не полностью. Угломестные ДН ФАР третьего (для него j=3, но s=4) 2.4 и четвертого (для него j=4, но s=5) 2.5 вспомогательных БЛАО имеют обозначения 2.4А и 2.5А. Как видно из фиг.4, ДН пяти БЛАО перекрывают существенный объем пространства по высоте (углу места), что не может быть реализовано одним секторным БЛАО. На фиг.5 показано положение ДН вспомогательных БЛАО при обнаружении ВО в пределах третьего ДАС (s=1). Азимутальные границы третьего ДАС образуют полосу 6. Ее положение таково, что третий (s=3) секторный БЛАО 2.3 находится в пределах этой полосы. Диаграммы направленности вспомогательных БЛАО 2.1, 2.2, 2.4 и 2.5 в угломестной плоскости обозначены 2.1А, 2.2А, 2.4А и 2.5А соответственно. У секторного БЛАО 2.3 ДНА в угломестной плоскости должна быть расположена горизонтально, поэтому на фиг.5 она не демонстрируется. Положения ДНА вспомогательных БЛАО отвечают требованиям формулы (6).
Все остальные правила проведения обнаружения БЛА не отличаются от правил, изложенных в прототипе [6]. Ниже эти правила и требования приводятся в сокращенном виде.
В каждом узком азимутальном секторе БЛАО с пассивной ФАР размещается заблаговременно. В ШАС предлагается снижать угловую скорость вращения антенны АРЛСО и увеличивать частоту повторения импульсов этой РЛС. Степень изменения этих параметров должна ограничиваться возможностью сохранения однозначности измерения координат ВО [9,10] и осуществления обзора воздушного пространства за допустимое (отведенное нормативом) время. Приемная система радиолокатора каждого БЛАО должна быть настроена на ту же несущую частоту, что передатчик основной АРЛСО. Широкий азимутальный сектор должен охватывать все направления возможного подлета БЛА.
Величина УАС Δβyac не должна превосходить 10°.
Согласно предлагаемому способу целесообразно предусмотреть временную регламентацию передачи информации от каждого из S БЛАО на АРЛСО. Для этого весь временной цикл приема Тпрм предлагается делить на S интервалов ΔTпрм=Tпрм/S, чтобы каждому s-му БЛАО соответствовал именно его временной интервал Tпрмs. Аналогичным образом весь временной интервал передачи Тпрд информации от БЛАО на АРЛСО предлагается делить на S интервалов ΔТпрд=Тпрд/S, чтобы каждому s-му БЛАО соответствовал именно его временной интервал передачи сообщений на РЛС обнаружения Тпрдs.
Угломестное положение лепестка ДНА БЛАО определяется углом места его биссектрисы. Высоты полета всех БЛАО являются одинаковыми. Ширина и вид угломестной ДНА у всех БЛАО одинакова, так как одинаковы их антенные системы (ФАР).
Поскольку координаты геометрического центра соответствующего ДАС (находящегося в том узком азимутальном секторе, который облучается сигналами АРЛСО, то есть в котором в данный момент находится основной лепесток ДНА АРЛСО) известны, то все ДНА вспомогательных БЛАО можно с помощью управляющих сигналов направить в соответствующий момент времени в сторону соответствующего ДАС. То есть с помощью управляющих сигналов предлагается сообщать всем вспомогательным БЛАО координаты геометрического центра ДАС, принадлежащего тому УАС, в котором в данный период находится лепесток ДНА АРЛСО, и границы временного интервала нахождения лепестка ДНА АРЛСО в пределах этого УАС.
Величина Ксм зависит от величины Θε0,5 и высоты применения БЛАО. Для конкретных антенных систем и высот их полета значение Ксм может быть вычислено или определено экспериментально из расчета ограниченности числа УАС S (S≤8) и недопущения активного касания ДНА БЛАО поверхности земли в пределах дальности обнаружения. Для ширины лепестка ДНА по углу места с порядка 30-40° коэффициент Ксм может принимать значение 0,2-0,3.
Порядок принятия решения об обнаружении слабоотражающего БЛА остается аналогичным способу-прототипу [6], за исключением того, что в задаче отождествления исключается задача проверки принадлежности рассеянного сигнала секторному БЛАО.
Таким образом, предлагаемый радиолокационный способ обнаружения БЛА с малой радиолокационной заметностью должен состоять из следующих изложенных ниже последовательно выполняемых операций:
На основании сведений о возможных направлениях несанкционированного подлета БЛА назначают положение и начальную величину  широкого азимутального сектора обнаружения БЛА, перекрывающего все такие направления. Выбранную приближенно начальную величину ШАС увеличивают до значения
широкого азимутального сектора обнаружения БЛА, перекрывающего все такие направления. Выбранную приближенно начальную величину ШАС увеличивают до значения  где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°, узкие азимутальные секторы обнаружения являются смежными, то есть примыкающими друг к другу. Число S УАС определяют по формуле
где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°, узкие азимутальные секторы обнаружения являются смежными, то есть примыкающими друг к другу. Число S УАС определяют по формуле  Ceil(*) - операция округления числа * до следующего целого;
Ceil(*) - операция округления числа * до следующего целого;  - начальное значение азимутальной протяженности ШАС.
- начальное значение азимутальной протяженности ШАС.
В назначенном ШАС обнаружения уменьшают период повторения импульсов Ти и скорость вращения сор антенны АРЛСО по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты ВО и осуществлять обзор воздушного пространства за допустимое время.
Заблаговременно запускают в каждом УАС в направлении предполагаемого появления представляющих интерес БЛА с малой отражательной способностью (то есть в направлении дальней границы обнаружения АРЛСО) по биссектрисе соответствующего УАС БЛАО с пассивной работающей только на прием радиолокационной станцией, функционирующей на той же несущей частоте, что и основная активная РЛС обнаружения. Каждый из S БЛАО оснащают одинаковой по конструкции пассивной приемной фазированной антенной решеткой (ФАР), способной управлять азимутальным и угломестным положением основного лепестка ее ДН. Высоты полета всех БЛАО устанавливают одинаковыми и соответствующими высотам полета БЛА с несанкционированными траекториями.
Дальность нахождения БЛАО в каждом УАС выбирают на 3 км большей, чем дальняя граница зоны обнаружения АРЛСО, то есть максимальная приборная дальность АРЛСО, на которой предполагается обнаруживать БЛА, совершающие несанкционированные полеты.
Выделяют в пределах широкого азимутального сектора зону обнаружения в виде полосы, дальняя граница которой соответствует приборной дальности обнаружения АРЛСО, а радиальная протяженность составляет величину 1 км. При этом привлекаемые для приема сигналов от ВО, преодолевающих указанную полосу обнаружения в пределах ШАС, БЛАО размещают в пределах соответствующих узких азимутальных секторов на азимутальных биссектрисах соответствующих УАС. В каждом УАС применяют по одному БЛАО.
Проводящий обнаружение в своем УАС БЛАО называют секторным. Остальные БЛАО, проводящие обнаружение в каком-либо УАС, находясь при этом в иных узких азимутальных секторах, называют вспомогательными. По мере углового перемещения основного лепестка ДНА АРЛСО каждый БЛАО будет становиться секторным в период нахождения лепестка ДНА АРЛСО в его УАС. Когда лепесток ДНА АРЛСО находится в другом УАС, соответствующий БЛАО играет роль вспомогательного.
Полученные в результате пересечения границ полосы обнаружения и границ УАС секторы называют дальностно-азимутальными секторами. Нумеруют ДАС слева направо по направлению вращения антенны АРЛСО индексами s, где 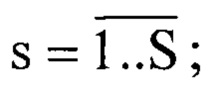 S - число используемых УАС и соответствующих ДАС.
S - число используемых УАС и соответствующих ДАС.
Обнаружение малозаметных БЛА проводят при их нахождении в соответствующих дальностно-азимутальных секторах.
Конструктивно предусматривают наличие постоянной устойчивой радиосвязи каждого s-го БЛАО с основной АРЛСО. Для организации двусторонней связи между БЛАО и АРЛСО для каждого s-го БЛАО устанавливают свой интервал приема ΔTпрмs и передачи ΔТпрдs информации, величины которых одинаковые для всех БЛАО ΔТпрм и ΔТпрд рассчитывают по формулам

где Тпрм - весь временной цикл приема информации бортовыми средствами связи БЛАО; Тпрд - весь временной цикл передачи информации с бортов БЛАО на борт АРЛСО.
Посредством радиосвязи с помощью управляющих сигналов АРЛСО управляют траекторией полета и местонахождением соответствующего s-го БЛАО. С помощью передаваемых на борт соответствующего s-го БЛАО управляющих сигналов РЛС управляют положением его диаграммы направленности по углу места и по азимуту.
В перерывах между управляющими сигналами АРЛСО в интервале ΔТпрдs передачи информации с борта s-го БЛАО передают на АРЛСО контрольные сигналы о координатах местоположения этого s-го БЛАО.
По линиям радиосвязи сообщают секторному и всем вспомогательным БЛАО координаты геометрического центра ДАС, принадлежащего тому узкому азимутальному сектору, в котором в определенный период будет находиться лепесток ДНА АРЛСО, а также границы временного интервала ΔTs ожидаемого нахождения лепестка ДНА АРЛСО в пределах этого s-го УАС с секторным БЛАО.
В процессе замедленного вращения антенны АРЛСО по азимуту в пределах ШАС излучают в пространство с помощью антенной системы АРЛСО импульсные зондирующие сигналы с уменьшенным периодом повторения импульсов Ти.
При нахождении лепестка ДНА АРЛСО в каком-либо s-м УАС все остальные узкие азимутальные сектора нумеруют по направлению вращения антенны АРЛСО от единицы до J (J=S-1). Диаграммы направленности антенн пассивных ФАР секторного и вспомогательных БЛАО в период ΔTS направляют по азимуту на геометрический центр s-го ДАС.
Секторному БЛАО определяют горизонтальное положение его ДН в угломестной плоскости, а каждому j-му вспомогательному БЛАО устанавливают угломестное положение его диаграммы направленности ФАР, вычисляемое по формуле

где Ксм - коэффициент смещения угломестного лепестка ДНА БЛАО по углу места в долях ширины его угломестной ДНА Θε0,5 по уровню половинной мощности, выбираемый заблаговременно экспериментальным или расчетным путем и равный, например, Ксм=0,2.
Принимают фазированной антенной решеткой каждого s-го БЛАО и антенной АРЛСО от каждого импульсного объема (элемента разрешения по дальности и азимуту) отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся ВО на фоне отражений от неподвижных местных предметов, суммируют полученное число (Nи мин) отраженных отфильтрованных импульсных сигналов для каждого импульсного объема бортового пассивного радиолокатора каждого БЛАО и АРЛСО.
Сравнивают результат суммирования сигналов в каждом импульсном объеме каждого БЛАО с установленным для БЛАО порогом П1 обнаружения БЛА с малой отражательной способностью. В случае превышения установленного порога П1 на борту БЛАО принимают решение о том, что в соответствующем импульсном объеме радиолокатора БЛАО обнаружен движущийся ВО. Определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема. Координаты дальности и азимута каждого обнаруженного ВО передают с борта каждого БЛАО по линии радиосвязи на борт АРЛСО.
Сравнивают результат суммирования сигналов в каждом импульсном объеме РЛС с установленным для АРЛСО порогом П2 обнаружения типовых ВО. В случае превышения установленного порога П2 на борту АРЛСО принимают решение о том, что в соответствующем импульсном объеме обнаружен движущийся типовой ВО. Определяют дальностную и азимутальную координаты обнаруженного ВО, то есть дальность и азимут соответствующего импульсного объема АРЛСО.
Проводят отождествление ВО, обнаруженных АРЛСО и пассивными радиолокаторами БЛАО, путем сравнения координат объектов, обнаруженных разными радиолокаторами, то есть основной АРЛСО и пассивными радиолокаторами БЛАО. По результатам совпадения координат с точностью до размеров строба отождествления принимают окончательное решение об обнаружении, то есть решение о принадлежности обнаруженного любым из БЛАО воздушного объекта к БЛА с малой отражательной способностью. При этом придерживаются следующего правила: если координаты ВО, обнаруженного БЛАО, не совпадают с координатами ВО, обнаруженных РЛС, то принимают решение о том, что обнаруженный ВО является БЛА с малой радиолокационной заметностью (с малой отражательной способностью). В остальных случаях обнаруженные ВО относят к типовым.
Поясним сущность и достигаемый технический результат (эффект) предлагаемого способа обнаружения БЛА.
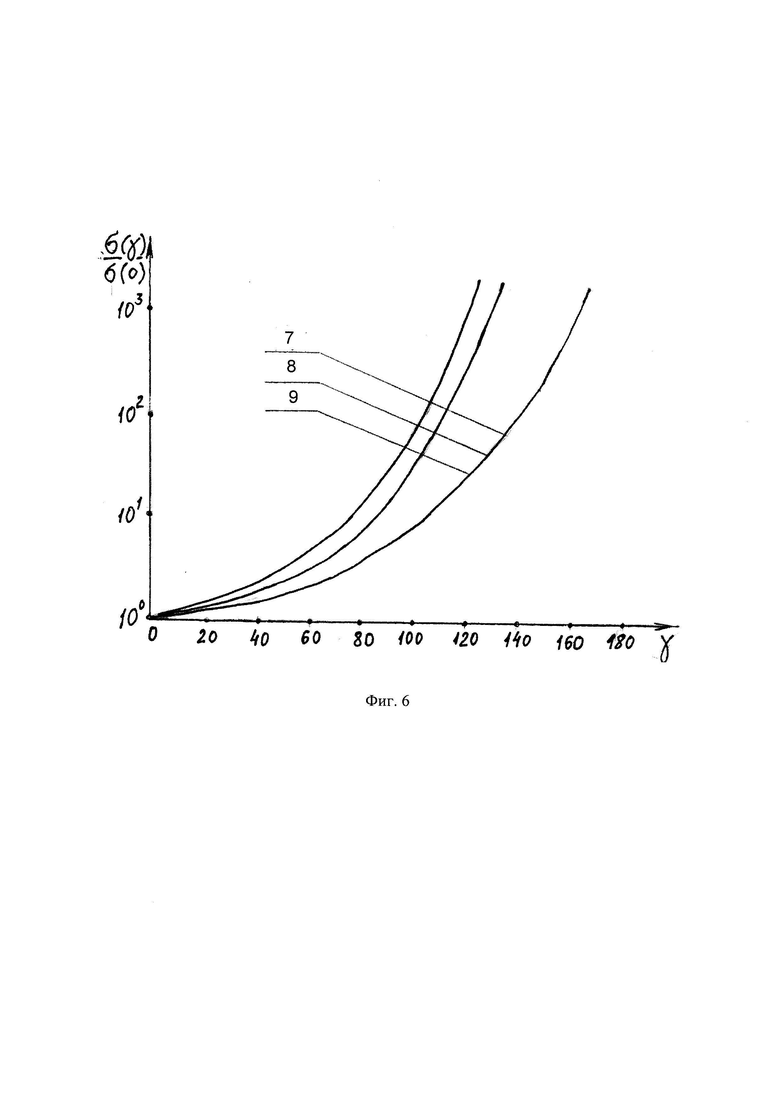
Более высокие характеристики обнаружения ВО, достигаемые применением совокупности удаленных от АРЛСО БЛАО, обоснованы в материалах прототипа [6]. При этом следует иметь ввиду, что интенсивность принятых в задней полусфере рассеянных сигналов (ЭПР) воздушных объектов, имеющих вытянутую вдоль линии визирования форму (конус, оживало, сфероид вращения, эллипсоид, цилиндр и т.п.), значительно превосходит интенсивность рассеянных сигналов (ЭПР) при зеркальном или боковом отражении. Это подтверждается теоретическими и экспериментальными исследованиями, представленными в работах [7,8]. Результаты данных исследований представлены в графическом виде на фиг.6, где в частности показаны зависимости относительных ЭПР объектов простой вытянутой формы от разницы ракурсов облучения и приема у. Относительной ЭПР в данном случае считают безразмерную величину, показывающую отношение ЭПР объекта, полученную при произвольной разнице ракурсов локации (например, при γ=180°), к ЭПР того же объекта, полученную при зеркальном отражении (γ=0°). На фиг.6 представлены зависимости относительных ЭПР следующих объектов: вытянутого сфероида (кривая 7); сигарообразного тела (кривая 8); полубесконечного конуса (кривая 9). Облучение во всех случаях проводилось со стороны узкой части объекта (в нос), что соответствует атакующим ракурсам локации, при которых воздушные объекты приближаются к АРЛСО по кратчайшим траекториям. По графику можно определить, что при приеме отраженного сигнала в задней полусфере по отношению к ВО при разности ракурсов γ, стремящейся к 180°, ЭПР объектов рассеяния волн существенно вырастают даже по сравнению с вариантом бокового приема рассеянных сигналов (γ=90°).
У летательных аппаратов на атакующих ракурсах элементы конструкции планера, как правило, имеют вытянутую по линии визирования форму. Исключение могут составить БЛА, выполненные из композиционных материалов, имеющих малый коэффициент отражения. В них основными отражателями являются антенные системы, двигательные установки, навигационное оборудование и т.д. Однако даже в этом случае эти элементы располагаются в планере БЛА вдоль фюзеляжа. Это позволяет считать, что обнаружение ВО способом, предложенным выше, будет более надежным, чем у прототипа.
В качестве представителей БЛА с вытянутой формой можно указать немецкий CL-289 [11 с. 124], французский Crecerelle [11 с. 125], французско-немецкий Brevel [11 с. 141], американский А160 Hummingbird [12 с. 68], ADM-160А MALD [12 с. 72], AQM-34 [12 с. 76], ударный израильский Harpy [12 с. 165], израильский разведывательный Hermes 450 [12 с. 168] и др.
Кратко обоснуем реализуемость (промышленную применимость) предложенного технического решения по обнаружению БЛА с помощью специальных беспилотных летательных аппаратов обнаружения.
Наличие БЛА с дальностью полета десятки-сотни км в настоящее время не вызывает сомнений. Беспилотные аппараты в настоящее время активно применяются во всех областях народного хозяйства, в том числе и в военном деле. Их характеристики широко освещены в открытой печати [11,12].
Способы управления современными БЛА также являются достаточно известными. Их эффективность подтверждается опытом применения БЛА [11] и многочисленными публикациями, раскрывающими принципы управления беспилотными летательными аппаратами [13-16].
Негативное влияние ветра и другие дестабилизирующие факторы, сопровождающие БЛА и его бортовой радиолокатор, устраняется компенсационными методами, без которых невозможно проводить картографирование местности бортовыми радиолокаторами с синтезированной апертурой. Эти методы являются известными [17] и уже применяемыми в бортовых радиолокационных системах БЛА. Так, например, в [18] повествуется о радаре MiSAR, устанавливаемом на разведывательные БЛА. Этот радар с массой около 4 кг и размещается внутри объема в 10 кубических дециметров, потребляя мощность не более 60 Вт. Он может просматривать полосы земной поверхности шириной до 1 км в полосовом режиме, обеспечивая разрешение около 0,5 м. Антенна радара на карданной подвеске нейтрализует рыскание и изменение угла крена несущей платформы. Полученная радаром радиолокационная информация передается по линии передачи данных на наземную станцию управления видовой обработки в реальном масштабе времени.
Примером отечественного бортового радиолокатора с синтезированной апертурой (РСА) является также мини-радиолокатор "Генезис PCA" [19]. Он разработан компанией «Техногенезис» ООО «Лазерные компоненты». Масса его антенны составляет 1 кг, инерциального блока - 1,1 кг, стабилизированного привода антенны - 3,5 кг, вычислителя - 2,2 кг. Общая масса радиолокатора с вычислителем 7,8 кг. Радар ведет радиолокационную съемку земной поверхности полосой 3 км с разрешением 0,5 м. Подобных радиолокаторов в России большое множество. Все они имеют массу, допускающую их использование в составе бортового оборудования БЛА.
Возможность углового перемещения луча диаграммы направленности антенны радиолокатора БЛАО может быть обоснована множеством публикаций о реализации прожекторного (телескопического) режима синтезирования апертуры, который в соответствии со своим принципом предполагает постоянное сканирование лучом ДНА. Об этом дословно свидетельствует источник [20]. Очевидно, что организовать сканирование лучом ДНА конструктивно проще, применяя фазированную антенную решетку. Так в [21] детально описана структура радиолокатора БЛА с высоким разрешением на основе активной фазированной антенной решетки, осуществляющей электронное сканирование лучом (основным лепестком) ДНА в азимутальной и угломестной плоскостях. В данном радиолокаторе предусмотрена стабилизация луча ДНА при эволюциях БЛА в турбулентной атмосфере.
Можно привести множество примеров конкретной реализации радиолокаторов БЛА с телескопическим режимом синтезирования апертуры антенны. Например, в [17 с. 41] описывается радиолокатор Lynx (AN/APY-8), предназначенный в том числе и для БЛА. В нем наряду с полосовым реализован и телескопический режим синтезирования апертуры с разрешением 0,1 м. Этот режим требует изменения положения луча ДНА по азимуту. Далее в [17 с. 42] рассмотрен радиолокатор MiniSAR уменьшенной по сравнению с Lynx массой. Основным режимом работы его РСА является телескопический, при котором луч ДНА сканирует в азимутальной плоскости по определенному закону. Сигналы управления могут изменять этот закон, что является подтверждением возможности управления лучом ДНА радиолокатора БЛА, которое необходимо для реализации предлагаемого способа обнаружения БЛА (с малой радиолокационной заметностью). Приводятся в [17 с. 44-45] сведения и о семействе радиолокаторов NanoSAR, предназначенных для мини-БЛА типа ScanEagle и RQ-11 Raven. В перечень режимов радиолокаторов NanoSAR входит телескопический с изменением углового положения луча ДНА.
Что касается метода отождествления воздушных объектов путем проверки попадания их отметок в стробы отождествления, то этот прием является стандартным и обоснованным в прототипе [6].
Предложенный способ обнаружения представляет собой разновидность так называемой радиолокации «на просвет», которая уже используется в конкретной радиолокационной технике. Так в [22] описан радиолокационный комплекс (РЛК) «Барьер-Е», представляющий собой принципиально новый тип радиолокатора, использующего метод бистатической локации «на просвет». За счет «просветного» эффекта между передатчиком и приемником бистатической системы в нем формируется область с исключительно высоким энергетическим потенциалом - радиолокационный барьер, позволяющий надежно обнаруживать малозаметные цели, недоступные для обнаружения традиционными моностатическими РЛС. При радиолокации «на просвет» эффективная поверхность рассеяния воздушных объектов возрастает на 2-3 порядка и не зависит от наличия на них радиопоглощающего покрытия, то есть стелс-объекты обнаруживаются в данном РЛК как обычные типовые.
В [23] описывается другая бистатическая РЛС типа 52Э6, которая также использует локацию «на просвет». Во время работы передатчик отправляет сигналы в направлении удаленного приемника. По искажению импульсов, доходящих до приемника, выявляются статические или движущиеся объекты. Такой метод работы, указывается в [23] позволяет резко увеличить ЭПР ВО в сравнении с ЭПР при работе «традиционной» РЛС. Соответственно, увеличивается вероятность обнаружения малоразмерной, маловысотной или малозаметной цели. Главное достоинство комплекса - способность обнаруживать малоразмерные и малозаметные ВО (БЛА). В соответствии с вышеизложенным факт увеличения значения ЭПР объектов при приеме рассеянных сигналов в задней по отношению в объекту рассеяния полусфере при локации «на просвет» [24, 25] является признанным и уже применяемым в технике.
Таким образом, все технические приемы, обеспечивающие применимость (воплощение, реализацию) предлагаемого способа обнаружения малозаметных БЛА являются известными и реализуемыми.
Как следует из описания и сущности предлагаемого способа, он действительно может улучшить характеристики обнаружения малозаметных беспилотных летательных аппаратов вытянутых форм на атакующих ракурсах за счет увеличенной интенсивности отражения радиоволн в задней полусфере. Способ может быть рекомендован для использования в перспективных РЛС обнаружения малозаметных ВО различного назначения, в том числе аэродромных, морских и других с большой дальностью действия.
Источники информации
1. Справочник по радиолокации / Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967. Том 1. Основы радиолокации. 456 с.
2. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М., Сов. радио, 1970.-560 с.
3. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Часть 1. Основы радиолокации. М., Воениздат, 1983. - 456 с.
4. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М., Воениздат, 1967. 768 с. (аналог).
5. Патент РФ №2760828 от 30.11.2021. Радиолокационный способ обнаружения беспилотных летательных аппаратов. МПК G01S 13/52. Вицукаев А.В., Митрофанов Д.Г., Кауфман Г.В., Сотникова О.Б. Заявка №2021108462. За-явл. 29.03.2021. Опубл. 30.11.2021. Бюл. №34 (аналог).
6. Патент РФ №2799866 от 12.07.2023. Радиолокационный способ обнаружения беспилотных летательных аппаратов. МПК G01S 13/88. Вицукаев А.В., Митрофанов Д.Г., Поисов Д.А., Кудрявцева А.А. Заявка №2022124808. За-явл. 22.09.2022. Опубл. 12.07.2023. Бюл. №20 (прототип).
7. Аверьянов В.Я. Разнесенные радиолокационные станции и системы. Минск: Наука и техника, 1978. 184 с.
8. Зигель и др. Двухпозиционные радиолокационные поперечные сечения поверхностей вращения // Вопросы радиолокационной техники. 1955. №6.
9. Финкелыптейн М.И. Основы радиолокации. Учебник для вузов. М., Сов. радио, 1973. 496 с.
10. Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. М., Сов. радио, 1970. 680 с.
11. Мосов С.П. Беспилотная разведывательная авиация стран мира: история создания, опыт боевого применения, современное состояние, перспективы развития. Монография. Киев: Изд. дом «Румб», 2008. 160 с.
12. Василии Н.Я. Беспилотные летательные аппараты. Минск: ООО «Попурри», 2003. 272 с.
13. https://infopedia.su/20x54a6.html.
14. https://bespilotnik24.ru/upravlenie-bpla.
15. https://www.dissercat.com/content/metody-upravleniya-bespilotnymi-letatelnymi-apparatami-v-obshchem-vozdushnom-prostranstve-s-.
16. Шилов K.E. Разработка системы автоматического управления беспилотным летательным аппаратом мультироторного типа. Труды МФТИ. 2014. Т.6. №4. С.139-152.
17. Купряшкин И.Ф., Лихачев В.П., Рязанцев Л.Б. Малогабаритные многофункциональные РЛС с непрерывным частотно-модулированным излучением. М., Радиотехника. 2020. 280 с.
18. http://militaryarticle.ru/viniti-ran/2005-viniti/11238-o-vozmozhnostjah-razvedyvatelnyh-bespilotnyh.
19. https://technogenezis.ru/mini-rls-genezis-rsa.
20. Виноградов В. Возможности современных РЛС с синтезированием апертуры антенны // Зарубежное военное обозрение. 2009. №2. С.52-57. http://militaryarticle.ru/zarubezhnoe-voennoe-obozrenie/2009-zvo/7730-vozmozhnosti-sovremennyh-rls-s-sintezirovaniem.
21. Патент РФ №2429990 от 27.09.2011. Многофункциональная РЛС высокого разрешения с активной фазированной решеткой для пилотируемых и беспилотных летательных аппаратов. Андреев Г.И и др. Заявка №2010134597 от 19.08.2010. Бюл. 27.
22. https://masterok.livejournal.com/2496279.html (РЛК «Барьер-Е» - нет аналогов в мире).
23. https://topwar.ru/170420-rlk-52ie6-struna-1-mnogozvennyj-radiolokacionnyj-barer.html (РЛК 52Э6 «Струна-1». Многозвенный радиолокационный барьер).
24. Ковалев А.Н., Ковалев Ф.Н. Определение момента пересечения объектом отрезка между приемником и передатчиком в системах радиолокации на просвет // Радиотехнические и телекоммуникационные системы. 2013. №4 (12). С.30-36.
25. Ковалев А.Н., Ковалев Ф.Н. Статистические характеристики ошибок местоопределения цели в бистатической радиолокационной системе просветно-го типа // Известия высших учебных заведений. Радиоэлектроника. 2014. Т.57. №3. С.3-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР СО СКАНИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2022 |
|
RU2815335C1 |
| ПЕРЕНОСНАЯ МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СЕКТОРНОГО ОБЗОРА ПРОСТРАНСТВА | 2024 |
|
RU2832851C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ Ku-ДИАПАЗОНА | 2021 |
|
RU2787574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
Изобретение относится к методам радиолокационного обнаружения воздушных объектов и, в частности, - к методам обнаружения беспилотных летательных аппаратов (БЛА) с малой радиолокационной заметностью. Техническим результатом изобретения является разработка усовершенствованного способа обнаружения БЛА с более высокими характеристиками за счет приема рассеянных сигналов в задней полусфере по отношению к объекту обнаружения. В заявленном способе осуществляют выделение в пределах широкого азимутального сектора зону обнаружения в виде полосы, дальняя граница которой соответствует приборной дальности обнаружения радиолокационной станции, а радиальная протяженность составляет величину 1 км. При этом для приема сигналов от воздушных объектов, преодолевающих указанную полосу обнаружения в пределах широкого азимутального сектора, размещают в пределах соответствующих узких азимутальных секторов беспилотные летательные аппараты обнаружения (БЛАО) на дальностях, превышающих дальнюю границу активной радиолокационной станции обнаружения на 3 км. В каждом узком азимутальном секторе применяется по одному БЛАО. Высоты полета всех БЛАО устанавливают одинаковыми и соответствующими среднестатистическим высотам полета ожидаемых БЛА с несанкционированными траекториями. Назначают дальностно-азимутальные сектора, в которых проводится обнаружение БЛА. Диаграммы направленности пассивных локаторов секторного и вспомогательных БЛАО направляют по азимутальной координате на дальностно-азимутальный сектор, в котором проводится обнаружение. Секторному БЛАО определяют горизонтальное положение его диаграммы направленности в угломестной плоскости. А каждому j-му вспомогательному БЛАО устанавливают угломестное положение его диаграммы направленности, обеспечивающее разные углы места диаграмм различных вспомогательных БЛАО. 6 ил.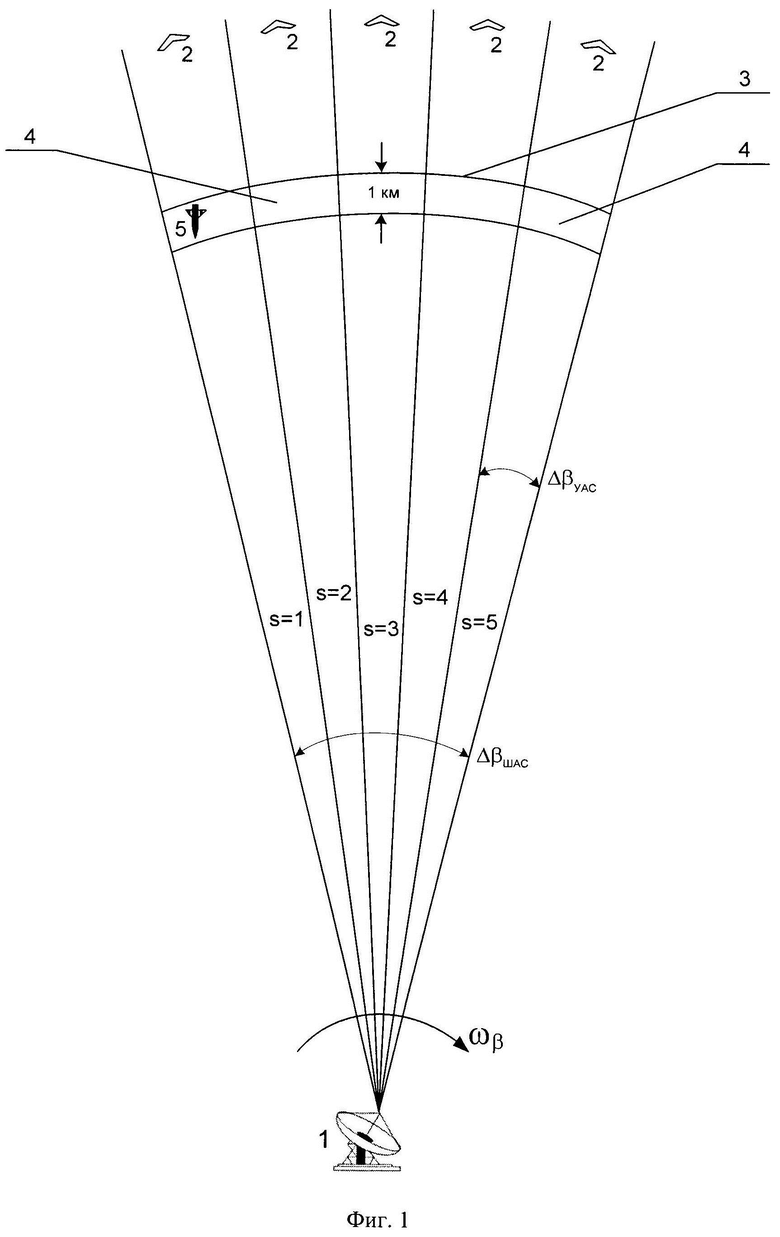
Радиолокационный способ обнаружения беспилотных летательных аппаратов, заключающийся в том, что для активной радиолокационной станции обнаружения на основании сведений о возможных направлениях несанкционированного подлета беспилотных летательных аппаратов назначают положение и начальную величину  широкого азимутального сектора обнаружения, перекрывающего все такие направления, выбранную приближенно начальную величину широкого азимутального сектора увеличивают до значения
широкого азимутального сектора обнаружения, перекрывающего все такие направления, выбранную приближенно начальную величину широкого азимутального сектора увеличивают до значения  где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°, при этом узкие азимутальные секторы обнаружения являются смежными, то есть примыкающими друг к другу, число S таких узких азимутальных секторов определяют по формуле
где Δβуас - величина узкого азимутального сектора обнаружения порядка 10°, при этом узкие азимутальные секторы обнаружения являются смежными, то есть примыкающими друг к другу, число S таких узких азимутальных секторов определяют по формуле  Ceil(*) - операция округления числа * до следующего целого, в назначенном широком азимутальном секторе обнаружения уменьшают период повторения импульсов Ти и скорость вращения ωβ антенны активной радиолокационной станции обнаружения по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты воздушных объектов и осуществлять обзор воздушного пространства за допустимое время, заблаговременно запускают в каждом узком азимутальном секторе в направлении дальней границы обнаружения активной радиолокационной станции обнаружения по биссектрисе соответствующего узкого азимутального сектора беспилотный летательный аппарат обнаружения с пассивной работающей только на прием радиолокационной станцией, функционирующей на той же несущей частоте, что и активная радиолокационная станция обнаружения, каждый из S беспилотных летательных аппаратов обнаружения оснащают одинаковой по конструкции пассивной приемной фазированной антенной решеткой, способной управлять азимутальным и угломестным положением основного лепестка ее диаграммы направленности, высоты полетов всех беспилотных летательных аппаратов обнаружения устанавливают одинаковыми, при этом привлекаемые для приема рассеянных воздушными объектами сигналов беспилотные летательные аппараты обнаружения размещают в пределах соответствующих узких азимутальных секторов на азимутальных биссектрисах соответствующих узких азимутальных секторов, причем в каждом узком азимутальном секторе применяют по одному беспилотному летательному аппарату обнаружения, проводящий обнаружение в своем узком азимутальном секторе беспилотный летательный аппарат обнаружения называют секторным, остальные беспилотные летательные аппараты обнаружения, проводящие обнаружение в каком-либо узком азимутальном секторе, находясь при этом в иных узких азимутальных секторах, называют вспомогательными, конструктивно предусматривают наличие постоянной устойчивой радиосвязи каждого s-го беспилотного летательного аппарата обнаружения с активной радиолокационной станцией обнаружения, для организации двусторонней связи между беспилотным летательным аппаратом обнаружения и активной радиолокационной станцией обнаружения для каждого s-го беспилотного летательного аппарата обнаружения устанавливают свой интервал приема ΔTпрмs и передачи ΔТпрдs информации, величины которых ΔТпрм и ΔТпрд, одинаковые для всех беспилотных летательных аппаратов обнаружения, рассчитывают по формулам
Ceil(*) - операция округления числа * до следующего целого, в назначенном широком азимутальном секторе обнаружения уменьшают период повторения импульсов Ти и скорость вращения ωβ антенны активной радиолокационной станции обнаружения по азимуту β до предельно малых величин, при которых сохраняется возможность однозначно определять координаты воздушных объектов и осуществлять обзор воздушного пространства за допустимое время, заблаговременно запускают в каждом узком азимутальном секторе в направлении дальней границы обнаружения активной радиолокационной станции обнаружения по биссектрисе соответствующего узкого азимутального сектора беспилотный летательный аппарат обнаружения с пассивной работающей только на прием радиолокационной станцией, функционирующей на той же несущей частоте, что и активная радиолокационная станция обнаружения, каждый из S беспилотных летательных аппаратов обнаружения оснащают одинаковой по конструкции пассивной приемной фазированной антенной решеткой, способной управлять азимутальным и угломестным положением основного лепестка ее диаграммы направленности, высоты полетов всех беспилотных летательных аппаратов обнаружения устанавливают одинаковыми, при этом привлекаемые для приема рассеянных воздушными объектами сигналов беспилотные летательные аппараты обнаружения размещают в пределах соответствующих узких азимутальных секторов на азимутальных биссектрисах соответствующих узких азимутальных секторов, причем в каждом узком азимутальном секторе применяют по одному беспилотному летательному аппарату обнаружения, проводящий обнаружение в своем узком азимутальном секторе беспилотный летательный аппарат обнаружения называют секторным, остальные беспилотные летательные аппараты обнаружения, проводящие обнаружение в каком-либо узком азимутальном секторе, находясь при этом в иных узких азимутальных секторах, называют вспомогательными, конструктивно предусматривают наличие постоянной устойчивой радиосвязи каждого s-го беспилотного летательного аппарата обнаружения с активной радиолокационной станцией обнаружения, для организации двусторонней связи между беспилотным летательным аппаратом обнаружения и активной радиолокационной станцией обнаружения для каждого s-го беспилотного летательного аппарата обнаружения устанавливают свой интервал приема ΔTпрмs и передачи ΔТпрдs информации, величины которых ΔТпрм и ΔТпрд, одинаковые для всех беспилотных летательных аппаратов обнаружения, рассчитывают по формулам

где Тпрм - весь временной цикл приема информации бортовыми средствами связи беспилотных летательных аппаратов обнаружения; Тпрд - весь временной цикл передачи информации с бортов беспилотных летательных аппаратов обнаружения на борт активной радиолокационной станции обнаружения, посредством радиосвязи с помощью управляющих сигналов активной радиолокационной станции обнаружения управляют траекторией полета и местонахождением соответствующего s-го беспилотного летательного аппарата обнаружения, с помощью передаваемых на борт соответствующего s-го беспилотного летательного аппарата обнаружения управляющих сигналов активной радиолокационной станции обнаружения управляют положением диаграммы направленности s-го беспилотного летательного аппарата обнаружения по углу места и по азимуту, в перерывах между управляющими сигналами активной радиолокационной станции обнаружения в интервале ΔТпрдs передачи информации с борта s-го беспилотного летательного аппарата обнаружения передают на активную радиолокационную станцию обнаружения контрольные сигналы о координатах местоположения этого s-го беспилотного летательного аппарата обнаружения, по линиям радиосвязи сообщают всем вспомогательным беспилотным летательным аппаратам обнаружения границы временного интервала ΔTs ожидаемого нахождения лепестка диаграммы направленности антенны активной радиолокационной станции обнаружения в пределах этого s-го узкого азимутального сектора с секторным беспилотным летательным аппаратом обнаружения, в процессе замедленного вращения антенны активной радиолокационной станции обнаружения по азимуту в пределах широкого азимутального сектора излучают в пространство с помощью антенной системы активной радиолокационной станции обнаружения импульсные зондирующие сигналы с уменьшенным периодом повторения импульсов Ти, принимают фазированной антенной решеткой каждого s-го беспилотного летательного аппарата обнаружения и антенной активной радиолокационной станции обнаружения от каждого импульсного объема отраженные сигналы, проводят фильтрацию этих отраженных сигналов по частоте для выделения отражений от движущихся воздушных объектов на фоне отражений от неподвижных местных предметов, суммируют полученное число Nи мин отраженных отфильтрованных импульсных сигналов для каждого импульсного объема бортового пассивного радиолокатора каждого беспилотного летательного аппарата обнаружения и активной радиолокационной станции обнаружения, сравнивают результат суммирования сигналов в каждом импульсном объеме каждого беспилотного летательного аппарата обнаружения с установленным для беспилотных летательных аппаратов обнаружения порогом П1 обнаружения беспилотных летательных аппаратов и в случае превышения установленного порога П1 на борту беспилотного летательного аппарата обнаружения принимают решение о том, что в соответствующем импульсном объеме радиолокатора беспилотного летательного аппарата обнаружения обнаружен движущийся воздушный объект, определяют дальностную и азимутальную координаты обнаруженного воздушного объекта, то есть дальность и азимут соответствующего импульсного объема, координаты дальности и азимута каждого обнаруженного воздушного объекта передают с борта каждого беспилотного летательного аппарата обнаружения по линии радиосвязи на борт активной радиолокационной станции обнаружения, сравнивают результат суммирования сигналов в каждом импульсном объеме активной радиолокационной станции обнаружения с установленным для активной радиолокационной станции обнаружения порогом П2 обнаружения типовых воздушных объектов и в случае превышения установленного порога П2 на борту активной радиолокационной станции обнаружения принимают решение о том, что в соответствующем импульсном объеме обнаружен движущийся типовой воздушный объект, определяют дальностную и азимутальную координаты обнаруженного воздушного объекта, то есть дальность и азимут соответствующего импульсного объема активной радиолокационной станции обнаружения, проводят отождествление воздушных объектов, обнаруженных активной радиолокационной станцией обнаружения и пассивными радиолокаторами беспилотных летательных аппаратов обнаружения, путем сравнения координат объектов, обнаруженных разными радиолокаторами, то есть активной радиолокационной станцией обнаружения и пассивными радиолокаторами беспилотных летательных аппаратов обнаружения, по результатам совпадения координат с точностью до размеров строба отождествления принимают окончательное решение об обнаружении, то есть решение о принадлежности обнаруженного любым из беспилотных летательных аппаратов обнаружения воздушного объекта к беспилотным летательным аппаратам, придерживаясь следующего правила: если координаты воздушного объекта, обнаруженного беспилотным летательным аппаратом обнаружения, не совпадают с координатами воздушных объектов, обнаруженных активной радиолокационной станцией обнаружения, то принимают решение о том, что обнаруженный воздушный объект является беспилотным летательным аппаратом, а в остальных случаях обнаруженные воздушные объекты относят к типовым,
отличающийся тем, что дальность нахождения беспилотного летательного аппарата обнаружения в каждом узком азимутальном секторе выбирают на 3 км большей, чем дальняя граница зоны обнаружения активной радиолокационной станции обнаружения, то есть максимальная приборная дальность активной радиолокационной станции обнаружения, на которой предполагается обнаруживать беспилотные летательные аппараты, совершающие несанкционированные полеты, выделяют в пределах широкого азимутального сектора зону обнаружения в виде полосы, дальняя граница которой соответствует приборной дальности обнаружения активной радиолокационной станции обнаружения, а радиальная протяженность составляет величину 1 км, секторы, полученные в результате пересечения границ полосы обнаружения и границ узких азимутальных секторов, называют дальностно-азимутальными секторами, нумеруют дальностно-азимутальные сектора слева направо по направлению вращения антенны активной радиолокационной станции обнаружения индексами s, где  S - число используемых узких азимутальных секторов и соответствующих дальностно-азимутальных секторов, одинаковые высоты полета всех беспилотных летательных аппаратов обнаружения устанавливают соответствующими среднестатистической высоте полета ожидаемых при обнаружении беспилотных летательных аппаратов, обнаружение беспилотных летательных аппаратов проводят при их нахождении в соответствующих дальностно-азимутальных секторах, по линиям радиосвязи сообщают всем вспомогательным беспилотным летательным аппаратам обнаружения координаты геометрического центра дальностно-азимутального сектора, принадлежащего тому узкому азимутальному сектору, в котором в определенный период будет находиться лепесток диаграммы направленности антенны активной радиолокационной станции обнаружения, при нахождении лепестка диаграммы направленности антенны активной радиолокационной станции обнаружения в каком-либо s-м узком азимутальном секторе все остальные узкие азимутальные сектора нумеруют по направлению вращения диаграммы направленности антенны активной радиолокационной станции обнаружения от единицы до J (J=S-1), диаграммы направленности антенн пассивных фазированных антенных решеток секторного и вспомогательных беспилотных летательных аппаратов обнаружения в период ΔTs направляют по азимуту на геометрический центр s-го дальностно-азимутального сектора, секторному беспилотному летательному аппарату обнаружения определяют горизонтальное положение его диаграммы направленности в угломестной плоскости, а каждому j-му вспомогательному беспилотному летательному аппарату обнаружения устанавливают угломестное положение диаграммы направленности его фазированной антенной решетки, вычисляемое по формуле
S - число используемых узких азимутальных секторов и соответствующих дальностно-азимутальных секторов, одинаковые высоты полета всех беспилотных летательных аппаратов обнаружения устанавливают соответствующими среднестатистической высоте полета ожидаемых при обнаружении беспилотных летательных аппаратов, обнаружение беспилотных летательных аппаратов проводят при их нахождении в соответствующих дальностно-азимутальных секторах, по линиям радиосвязи сообщают всем вспомогательным беспилотным летательным аппаратам обнаружения координаты геометрического центра дальностно-азимутального сектора, принадлежащего тому узкому азимутальному сектору, в котором в определенный период будет находиться лепесток диаграммы направленности антенны активной радиолокационной станции обнаружения, при нахождении лепестка диаграммы направленности антенны активной радиолокационной станции обнаружения в каком-либо s-м узком азимутальном секторе все остальные узкие азимутальные сектора нумеруют по направлению вращения диаграммы направленности антенны активной радиолокационной станции обнаружения от единицы до J (J=S-1), диаграммы направленности антенн пассивных фазированных антенных решеток секторного и вспомогательных беспилотных летательных аппаратов обнаружения в период ΔTs направляют по азимуту на геометрический центр s-го дальностно-азимутального сектора, секторному беспилотному летательному аппарату обнаружения определяют горизонтальное положение его диаграммы направленности в угломестной плоскости, а каждому j-му вспомогательному беспилотному летательному аппарату обнаружения устанавливают угломестное положение диаграммы направленности его фазированной антенной решетки, вычисляемое по формуле

где Ксм - коэффициент смещения угломестного лепестка диаграммы направленности антенны беспилотного летательного аппарата обнаружения по углу места в долях ширины его угломестной диаграммы направленности антенны Θε0,5 по уровню половинной мощности, выбираемый заблаговременно экспериментальным или расчетным путем.
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| СПОСОБ ТРЕТИЧНОЙ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ В ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЕ ПУНКТА УПРАВЛЕНИЯ | 2014 |
|
RU2561950C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| ФАДЕЕВ Р.С., МЯКИНЬКОВ А.В., БУРОВ В.Н., ОГУРЦОВ А.Г | |||
| Возможности обнаружения и определения координат малозаметных целей в многопозиционных радиолокационных системах с размещением позиций на борту беспилотных | |||

