Изобретение относится к технике автоматического управления ограничением скорости движения транспортных средств и может быть использовано в автомобилях с карбюраторным или инжекторным питанием двигателя при механическом или электронном приводе дроссельной заслонки.
Известен способ ограничения скорости, описанный при работе устройства для ограничения скорости (Авт. св. SU №926626, МПК G05D 13/02, опубл. 07.05.1982), заключающийся в регулировании подачи топлива в двигатель за счет работы центробежного механизма.
Недостатками указанного способа являются фиксированное значение величины прикрытия дроссельной заслонки при сигнале превышения заданной скорости, что при движении автомобиля в отличающихся по нагрузке режимах будет приводить к снижению комфортабельности из-за рывков крутящего момента двигателя, а также невысокая точность ограничения скорости, поскольку к погрешности центробежного механизма добавляется погрешность установки задатчика скорости с его неподвижным контактом.
Наиболее близким является способ автоматического ограничения скорости, описанный при работе устройства для управления скоростью транспортного средства (Патент GB №1516623, МПК В60К 28/00; В60К 31/00; В60К 31/02; В60К 31/04; F02D 29/02; F02D 41/14; F02D 41/20; G05D 13/62, опубл. 05.07.1978), заключающийся в воздействии на электронную систему управления двигателем, причем задание допускаемой скорости движения осуществляется при ее достижении в процессе движения.
Недостатками способа является то, что несмотря на введение вспомогательного модуля, предназначенного для исключения возможности возникновения режима «разноса» двигателя, при нажатии на педаль сцепления, вследствие нештатного срабатывания схемы управления, датчика педали сцепления или иных элементов устройства, проблема не становится решенной, поскольку вспомогательный модуль сам не гарантирован от отказа. Во-вторых, ведение элементов дублирования и блокировки усложняет систему, что способствует снижению надежности. Задание допускаемой скорости в процессе разгона автомобиля отвлекает водителя от управления, снижая безопасность движения, а само значение устанавливаемой скорости ввиду движения автомобиля на этой стадии с ускорением и субъективными качествами водителя недостаточно точным.
Задачей изобретения является разработка простого, эффективного и надежного способа автоматического ограничения скорости автомобилей.
Техническим результатом является повышение надежности способа автоматического ограничения скорости автомобиля и безопасности движения автомобиля.
Технический результат достигается в способе автоматического ограничения скорости автомобиля, включающем задание допускаемой скорости движения, сравнение с ней фактической скорости движения и регулирование текущей скорости движения путем механического воздействия на привод дроссельной заслонки двигателя с возможностью снятия ограничения допускаемой скорости движения, при этом механическое воздействие осуществляется на педаль привода дроссельной заслонки посредством рычажного механизма, обеспечивающего обратный ход педали привода дроссельной заслонки, задание допускаемой скорости движения осуществляется до момента ее достижения, а снятие ограничения допускаемой скорости движения осуществляется путем воздействия на педаль привода дроссельной заслонки с усилием, превышающим жесткость пружины компенсатора.
Заявляемый способ автоматического ограничения скорости автомобиля осуществляется за счет воздействия механического привода ограничителя скорости на внешний элемент управления скоростью автомобиля, а именно на педаль привода дроссельной заслонки, противодействуя водителю и тем самым сообщая ему о превышении допускаемой скорости и ограничивая его возможность в перемещении педали, что исключает необходимость электронной связи с педалями сцепления и тормоза и делает невозможным возникновение режима «разноса» двигателя при выжатой педали сцепления, а способ абсолютно безопасным при любом нарушении функционирования как электронных элементов управления, так и механического устройства привода.
Для осуществления способа на автомобиль с блоком управления и приводом дроссельной заслонки устанавливается рычажный механизм, состоящий из двух шатунов, один из которых снабжен пружинным компенсатором. Рычажный механизм соединяет кривошип привода регулятора с педалью привода дроссельной заслонки. При этом пружина компенсатора своей податливостью позволяет водителю с незначительно повышенным усилием на педали привода дроссельной заслонки управлять автомобилем при отказе самого привода, блока управления или нештатного отключения устройства.
Задание водителем допускаемой скорости движения автомобиля до момента ее достижения, в том числе еще на стоянке, в виде фиксированных значений, оговоренных в «Правилах дорожного движения» посредством кнопочного с фиксацией или галетного переключателя, позволяет ему не отвлекаться от дороги и не следить за показаниями спидометра при настройке ограничителя скорости движения, при этом заданное в цифровой форме дискретное значение предельной скорости движения исключает субъективную погрешность самого водителя и обеспечивает выполнение ограничения заданной скорости движения с высокой точностью.
При необходимости выполнения маневра, требующего превышения заданной ограничителем скорости, водителю необходимо прилагать к педали привода дроссельной заслонки усилие, превышающее жесткость пружины компенсатора, при этом процессор управления регулятора включает световой и звуковой сигналы, свидетельствуя о превышении скорости движения.
При достижении автомобилем ограниченной скорости со значительным ускорением процессор управления регулятора во избежание «заброса» скорости, ее превышения за счет инерции выводит педаль привода дроссельной заслонкой в положение холостого хода, при котором происходит энергичное торможение двигателем, и лишь затем выполняет саморегулирование, что исключает возможность превышения ограниченной скорости при динамичном разгоне автомобиля.
При движении автомобиля под уклон световой и звуковой сигналы ограничителя скорости свидетельствуют о том, что усилия торможения двигателем на данной передаче коробки скоростей недостаточно и водителю необходимо штатно переключиться на пониженную передачу или штатно воспользоваться тормозом.
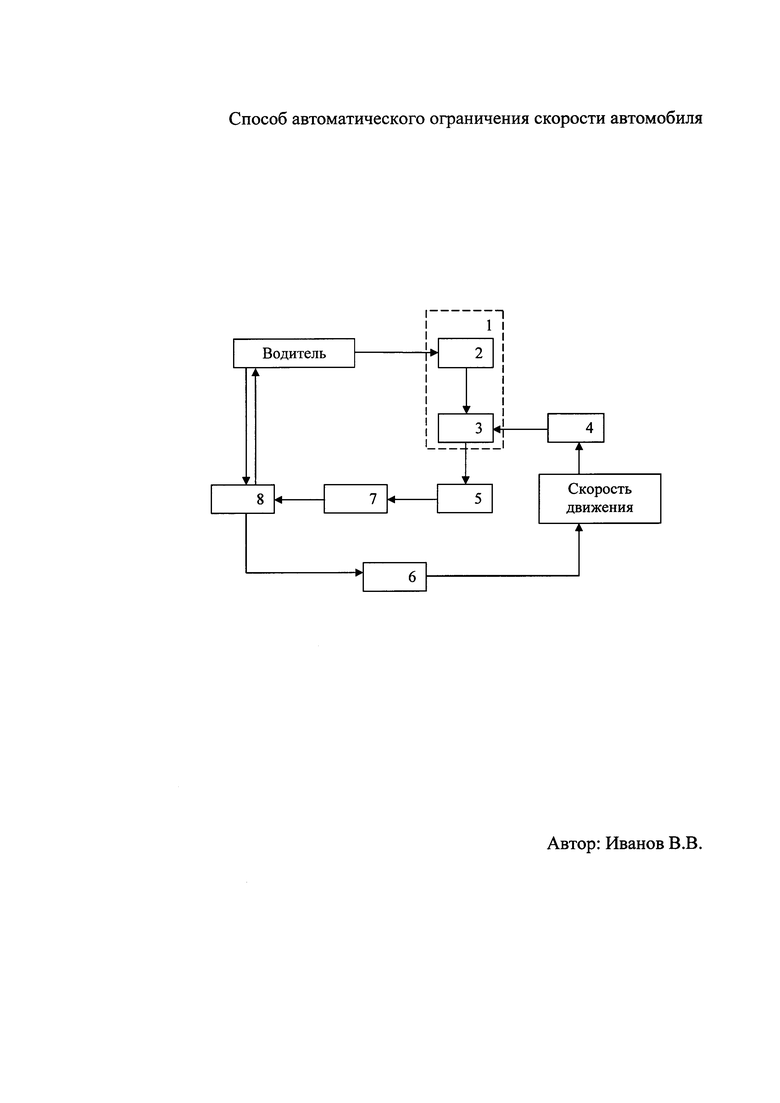
Предлагаемый способ поясняется схемой осуществления ограничения скорости автомобиля.
Способ автоматического ограничения скорости автомобиля предполагает задание допускаемой скорости движения до момента ее достижения, а именно перед началом движения. После задания водителем на пульте управления 1 посредством кнопочного с фиксацией или галетного переключателя задатчика скорости 2 допускаемой скорости движения автомобиля, в процессе его движения модуль управления 3, являясь цифровым циклическим решающим устройством, входящим в состав пульта управления 1, сопоставляет заданное значение допускаемой скорости и текущее значение скорости движения, получаемое от датчика скорости 4.
При достижении автомобилем скорости, превышающей заданное значение, модуль управления 3, получив электрический сигнал от датчика скорости 4, включает электромеханический привод 5 дроссельной заслонки 6, который воздействует на кривошип рычажного механизма 7, перемещением его в положение полного ограничения, переставляющим педаль 8 привода 5 дроссельной заслонки 6 в положение холостого хода. Водитель при этом ощущает воздействие со стороны педали 8, свидетельствующее о превышении допускаемой скорости и требованию не противиться этому воздействию. В то же время дроссельная заслонка 6 обеспечивает снижение скорости движения автомобиля независимо от действий водителя.
Если текущая скорость не превышает допускаемую с конструктивно заложенным упреждением, процесс осуществляется с задержкой по времени.
Как только текущая скорость упадет ниже допускаемой (заданной) на двукратную величину упреждения, включается электромеханический привод 5 перемещением кривошипа в положение свободного хода, воздействуя на рычажной механизм 7. Оба шатуна рычажного механизма 7 провисают под собственным весом и не являются помехой для перемещения педали 8. Педаль 8 привода управления 5 дроссельной заслонкой 6 вновь становится податливой для воздействия водителя.
В случае, когда текущая скорость превысит допускаемую на величину двукратного упреждения, что возможно при движении автомобиля под уклон и когда торможение двигателем не обеспечивает допускаемой скорости, включается генератор звука с зуммером в модуле управления 3, сигнализируя водителю о необходимости выполнить штатное переключение на пониженную передачу для повышения тормозного момента двигателя или произвести штатное подтормаживание рабочим тормозом.
При необходимости выполнить маневр с превышением допускаемой скорости, установленной водителем на задатчике скорости 2, водителю необходимо произвести нажатие на педаль 8 привода 5 дроссельной заслонки 6 с усилием, превышающим жесткость пружинного компенсатора рычажного механизма 7. При этом необратимый по передаче движения редуктор электромеханического привода 5 исключает возможность обратного воздействия, а сжимаемый пружинный компенсатор рычажного механизма 7 позволяет переместить педаль 8 на полную величину ее хода.
Пружинный компенсатор двухшатунного рычажного механизма 7, установленного между приводом 5 и педалью 8, может быть выполнен на любом из шатунов рычажного механизма 7, а минимальная жесткость пружины пружинного компенсатора должна превышать жесткость возвратной пружины педали 8.
Способ автоматического ограничения скорости автомобиля осуществляется следующим образом.
При включении водителем питания пульта управления 1 привод 5 дроссельной заслонки 6 выполняет перестановку кривошипа рычажного механизма 7 в положение свободного хода. При этом оба шатуна рычажного механизма 7 провисают под собственным весом и не являются помехой для перемещения педали 8 привода 5 дроссельной заслонки 6. В соответствии с допустимой скоростью движения автомобиля вводится ее значение на задатчике скорости 2 пульта управления 1 - устанавливается скоростной режим движения автомобиля.
При движении автомобиля со скоростью, не превышающей введенное ограничение, шатуны рычажного механизма 7 не оказывают влияния на перемещение водителем педали 8 привода 5 дроссельной заслонки 6 и управление скоростью автомобиля.
При достижении автомобилем скорости, превышающей заданное значение, модуль управления 3, являющийся цифровым циклическим решающим устройством, получив электрический сигнал от датчика скорости 4 в виде количества импульсов за единицу времени, очищает оперативную память и заносит в нее установки временных задержек и упреждений срабатывания и текущее значение скорости.
Если текущая скорость не превышает допускаемую с конструктивно заложенным упреждением, учитывающем силы инерции автомобиля при разгоне и динамические качества двигателя автомобиля, процесс продолжается с задержкой по времени. При превышении допускаемой скорости с учетом конструктивно заложенного упреждения процессор модуля управления 3 включает привод 5, переставляющий кривошип рычажного механизма 7, в положение полного ограничения, при котором шатуны рычажного механизма 7 вытягиваются в линию и отжимают (оттягивают) педаль 8 привода 5 дроссельной заслонки 6 в положение холостого хода. Водитель при этом ощущает воздействие со стороны педали 8, свидетельствующее о превышении допускаемой скорости и требовании не противиться этому воздействию. Таким образом осуществляется первое ограничение скорости автомобиля в течение цикла регулирования превышения установленной скорости, осуществляемое перестановкой педали 8 привода 5 дроссельной заслонки 6 в положение холостого хода с целью максимального использования режима торможения двигателем при динамичном разгоне автомобиля.
Затем, как только текущая скорость упадет ниже допускаемой на двукратную величину упреждения, определяющего пороговую чувствительность устройства, включается привод 5, перемещая кривошип рычажного механизма 7 в положение, обеспечивающее освобождение педали 8 привода 5 дроссельной заслонки 6, при котором педаль 8 вновь становится податливой. Перемещая педаль 8 привода 5 дроссельной заслонки 6 до момента возникновения ощущаемого на педали 8 сопротивления, водитель будет тем самым поддерживать движение автомобиля с установленным ограничением. Таким образом, осуществляется процесс саморегулирования скорости автомобиля.
При превышении усилия сопротивления на педали 8 привода 5 дроссельной заслонки 6 наступит новый цикл разгона автомобиля, за которым последует процесс саморегулирования.
В случае, когда текущая скорость превысит допускаемую на величину двукратного упреждения, что возможно при движении автомобиля под уклон, и когда торможение двигателем не обеспечивает достижения допускаемой скорости, включается генератор звука с зуммером в модуле управления 3, сигнализируя водителю о необходимости выполнить штатное переключение на пониженную передачу для повышения тормозного момента двигателя или произвести штатное подтормаживание рабочим тормозом.
При необходимости выполнить маневр с превышением допускаемой скорости, установленной водителем на задатчике скорости 2, водителю необходимо произвести нажатие на педаль 8 привода 5 дроссельной заслонки 6 с усилием, превышающим жесткость пружинного компенсатора рычажного механизма 7. При этом необратимый по передаче движения редуктор электромеханического привода 5 педали 8 исключает возможность обратного воздействия со стороны водителя на его двигатель, а сжимаемая пружина рычажного механизма 7 позволяет переместить педаль 8 привода 5 дроссельной заслонки 6 на полную величину ее хода.
Таким образом, способ автоматического ограничения скорости автомобиля, при котором задание допускаемой скорости движения осуществляется до момента ее достижения, регулирование текущей скорости движения осуществляется путем механического воздействия на педаль привода дроссельной заслонки посредством рычажного механизма, обеспечивающего ее обратный ход, а снятие ограничения допускаемой скорости движения осуществляется путем воздействия на педаль привода дроссельной заслонки с усилием, превышающим жесткость пружины пружинного компенсатора рычажного механизма, является простым, безопасным и надежным, так как исключает возникновение режима «разноса» двигателя при выжатой педали сцепления, позволяет водителю не отвлекаться от дороги и не следить за показаниями спидометра при настройке ограничителя скорости движения, а заданное в цифровой форме дискретное значение предельной скорости движения исключает субъективную погрешность водителя и обеспечивает выполнение ограничения заданной скорости движения с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля и регулирования скоростного режима транспортного средства | 2020 |
|
RU2737957C1 |
| Способ регулирования скорости движения транспортного средства | 2020 |
|
RU2735764C1 |
| ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2581609C2 |
| АДАПТАЦИЯ И ОПРЕДЕЛЕНИЕ СТАРТА АВТОМОБИЛЯ | 2011 |
|
RU2573189C2 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО ПРЕКРАЩЕНИЯ ПОДАЧИ ТОПЛИВА В КАРБЮРАТОРНЫХ ТРАНСПОРТНЫХ ДВИГАТЕЛЯХ ПРИ ДВИЖЕНИИ ПО ИНЕРЦИИ (НАКАТОМ) | 1939 |
|
SU63594A1 |
| Способ управления теплоэлектрическим приводом экипажа | 1976 |
|
SU611797A1 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2575843C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСИЛИЕМ НА ПЕДАЛИ АКСЕЛЕРАТОРА | 2011 |
|
RU2526122C2 |
| Устройство управления теплоэлектрическим приводом самоходных машин | 1976 |
|
SU653149A1 |
| УСТРОЙСТВО ДЛЯ РУЧНОГО ДУБЛИРУЮЩЕГО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2010 |
|
RU2435680C1 |
Изобретение относится к технике автоматического управления ограничением скорости движения транспортных средств. При осуществлении способа автоматического ограничения скорости автомобиля задают допускаемую скорость движения. Сравнивают с допускаемой скоростью движения фактическую скорость движения. Регулируют текущую скорость движения путем механического воздействия на привод (5, 7) дроссельной заслонки (6) двигателя с возможностью снятия ограничения допускаемой скорости движения. Механическое воздействие осуществляют на педаль (8) привода дроссельной заслонки (6) посредством рычажного механизма (7), обеспечивающего обратный ход педали (8) привода дроссельной заслонки (5, 7). Задание допускаемой скорости движения осуществляют до момента ее достижения. Снятие ограничения допускаемой скорости движения осуществляют путем воздействия на педаль (8) привода (5, 7) дроссельной заслонки (6) с усилием, превышающим жесткость пружины компенсатора. Достигается повышение надежности автоматического ограничения скорости и повышение безопасности. 1 ил.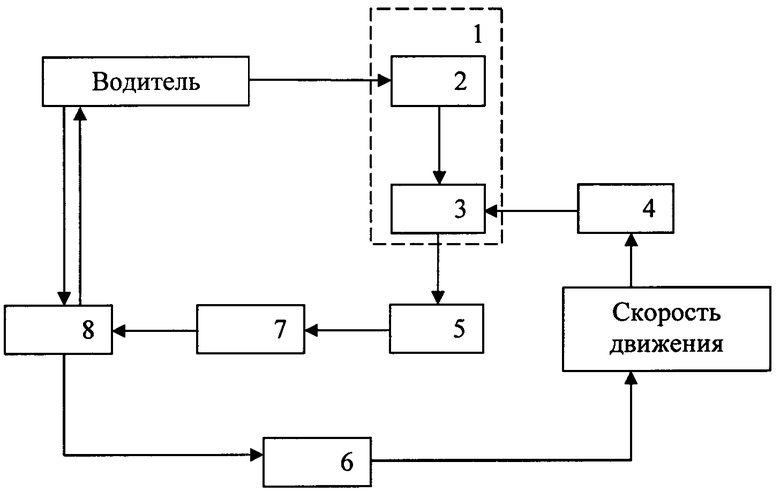
Способ автоматического ограничения скорости автомобиля, включающий задание допускаемой скорости движения, сравнение с ней фактической скорости движения и регулирование текущей скорости движения путем механического воздействия на привод дроссельной заслонки двигателя с возможностью снятия ограничения допускаемой скорости движения, отличающийся тем, что механическое воздействие осуществляется на педаль привода дроссельной заслонки посредством рычажного механизма, обеспечивающего обратный ход педали привода дроссельной заслонки, задание допускаемой скорости движения осуществляется до момента ее достижения, а снятие ограничения допускаемой скорости движения осуществляется путем воздействия на педаль привода дроссельной заслонки с усилием, превышающим жесткость пружины компенсатора.
| US 6549841 B1, 15.04.2003 | |||
| WO 2013062449 A1, 02.05.2013 | |||
| KR 100753983 B1, 24.08.2007. |

