Изобретение относится к космической технике и может быть использовано при разработке и создании стартовых систем для космических летательных аппаратов.
Для того чтобы покоящийся на Земле летательный аппарат переместить на космическую орбиту, ему необходимо сообщить разгонный импульс, позволяющий преодолеть гравитацию и сопротивление плотных слоев атмосферы. Для получения разгонного импульса используются ракетные двигатели, альтернативы которым пока нет.
Проблемным является начальный этап полета летательного аппарата, когда расходуется наибольшее количество топлива - "большая часть топлива тратится по существу для того, чтобы разогнать до большой скорости само же топливо". К тому же старт космических летательных аппаратов большой грузоподъемности с ракетными двигателями производится из вертикального положения, что требует строительства сложных стартовых комплексов.
С целью экономии топлива на начальном этапе полета космических летательных аппаратов предлагались различные технические решения: запуск ракеты с воздушного шара, с большегрузных реактивных самолетов. Предлагались также технические решения, согласно которым разгонный импульс на начальном этапе полета летательный аппарат получал при движении из горизонтального положения, находясь на стартовой платформе, оборудованной электродвигателем, по наклонной направляющей конструкции вниз с последующим изменением направления движения по восходящей ветви направляющей конструкции вверх ("Полет на Луну". Под ред. Гильзина К. и Гурвича Г.М., 1958, с. 19-21; Шибанов А. "Заботы космического архитектора". М., 1982, с. 13-17; Патент RU №2046070, 1991, B64F 1/02; Патент US №3134300, 1964, B64F 1/02; Патент RU №2381154, 2010, B64G 5/00).
Известно, что чем больше радиус кривизны восходящей ветви направляющей конструкции при заданной величине ускорения, тем меньше возникающие перегрузки, т.е. радиус кривизны и скорость движения летательного аппарата по направляющей конструкции являются лимитирующими факторами при создании стартовой системы такого рода. Ни в патентной, ни в научной литературе этот вопрос фактически не обсуждается. Вариантов реализации стартовой системы с учетом радиуса кривизны направляющей конструкции и развиваемого ускорения может быть множество. Однако при реализации стартовой системы, в которой летательный аппарат на стартовой платформе при получении разгонного импульса перемещается по направляющей конструкции, имеющей определенные радиусы кривизны, приемлемыми могут быть параметры конструкции, укладывающиеся в некоторые оптимальные границы с допустимыми значениями перегрузок и скорости (ускорения). С одной стороны, увеличение радиуса кривизны восходящей ветви направляющей конструкции позволяет существенно уменьшить величину перегрузок, но при этом значительно увеличиваются размеры сооружения в целом. Расчеты показывают, что оптимальный результат - допустимые перегрузки и реализуемые размеры направляющей конструкции - может быть получен при радиусе кривизны восходящей ветви направляющей конструкции, находящемся в пределах некоторого интервала величин, выход за границы которого сопряжен с возникновением непреодолимых в земных условиях и при существующем уровне техники препятствий.
По предлагаемому техническому решению оптимальный вариант значений радиуса кривизны восходящей ветви направляющей конструкции выбран в пределах от 500 до 10000 м, что предполагает возможность реализации предлагаемого технического решения: постройку направляющей конструкции заданных размеров, получение разгонного импульса без превышения допустимых значений перегрузок, возможность существенной экономии топлива, старт из горизонтального положения летательного аппарата, возможность экстренного старта летательного аппарата для оказания помощи при аварийных ситуациях в космосе и др. Приведенные в формуле изобретения параметры выбраны условно как обеспечивающие некоторые оптимальные возможности реализации предлагаемой стартовой системы.
Следует отметить, что согласно предлагаемому техническому решению ускорение летательного аппарата на стартовой платформе происходит постепенно, обеспечивая максимально допустимые значения перегрузок на конечном участке восходящей ветви направляющей конструкции, при этом пребывание летательного аппарата на конечном участке направляющей конструкции кратковременно, а в дальнейшем полет осуществляется в режиме работы ракетного двигателя летательного аппарата.
Технология постройки эстакад и тоннелей соответствующих размеров хорошо отработана, получение значительных по величине разгонных импульсов с помощью линейных электродвигателей становится реальностью. Поезда перемещаются со скоростью более 500 км/час и это не предел. Постройка предлагаемой стартовой системы вблизи экватора позволит уже на старте разогнать летательный аппарат до скорости 600 -1000 м/с, при этом перегрузки будут иметь вполне допустимые значения, а экономия топлива будет существенной.
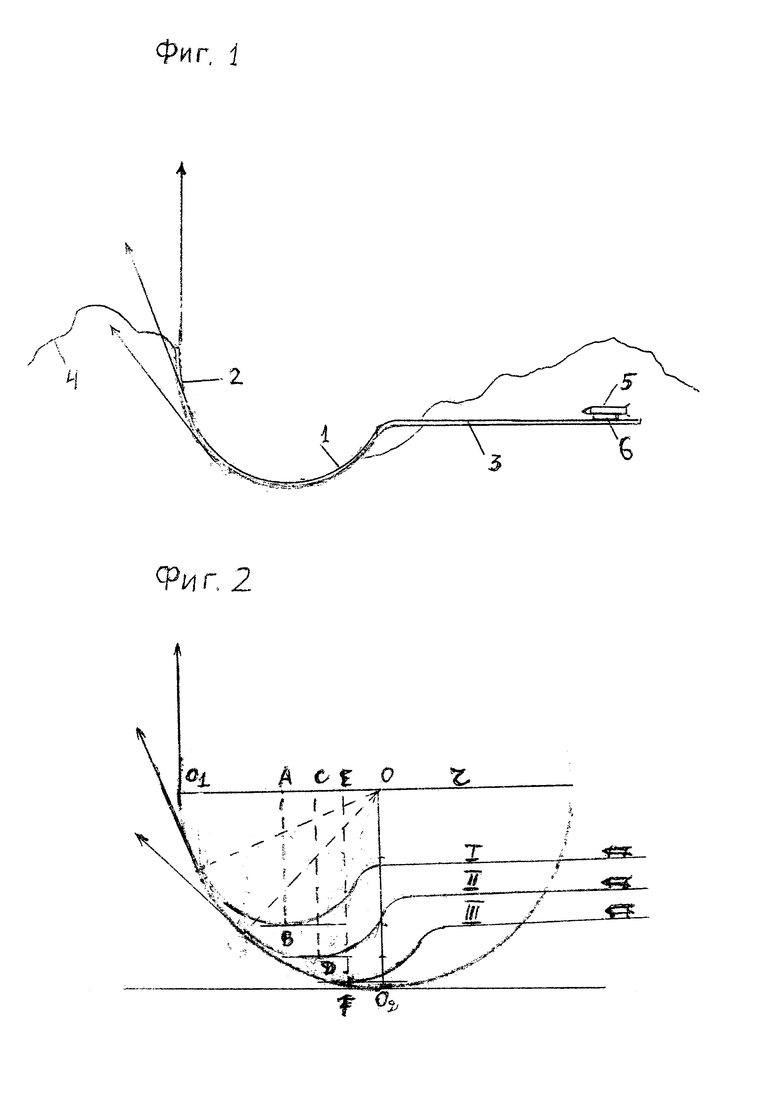
На чертеже (Фиг. 1) дана принципиальная схема предлагаемой стартовой системы для космических летательных аппаратов.
Краткое описание чертежа
Стартовая система состоит из направляющей конструкции, имеющей нисходящую (1) и восходящую (2) ветви, оборудованные элементами линейного электродвигателя, расположенную на эстакаде (3), опирающейся на склоны возвышенностей (4). Летательный аппарат (5) располагается на стартовой платформе (6), оборудованной элементами линейного электродвигателя.
Краткое описание работы стартовой системы.
При включении электродвигателя летательный аппарат начинает движение с ускорением по направляющей конструкции. На заданном участке восходящей ветви направляющей конструкции летательный аппарат отсоединяется от стартовой платформы и включается ракетный двигатель летательного аппарата, а стартовая платформа тормозится.
Примеры некоторых вариантов параметров предлагаемой стартовой системы.
На фиг. 2 дано схематическое изображение стартовой системы. Вариантов реализации стартовой системы может быть множество. В примерах указаны некоторые самые существенные параметры, учитываемые при выборе вариантов реализации стартовой системы при существующем уровне техники. Очевидно, что определяющими параметрами будут размеры конструкции системы и достигаемые при работе системы величины перегрузок. Для каждого радиуса кривизны восходящей ветви направляющей конструкции приведены три варианта исполнения: I, II и III, различающиеся размерами направляющей конструкции, учитывая, что чем больше длина дуги восходящей ветви направляющей конструкции, тем меньше перегрузки при движении летательного аппарата по направляющей конструкции, т.к. увеличивается протяженность проходимого летательным аппаратом на стартовой платформе пути. В примерах указаны такие параметры, как максимальная высота, на которой летательный аппарат отсоединяется от стартовой платформы (АВ, СД и EF), протяженность пути от самой нижней точки направляющей конструкции до самой верхней точки ( О1В,
О1В,  O1Д и O1F). Для упрощения вычислений в качестве точек отсчета радиус OO2 поделен на три части, а дуга O1O2 поделена на четыре части. При определении длины дуг использовалась формула L=2πr. Цифровые значения приведенных параметров округлены, однако дают наглядное представление о размерах стартовой системы при различных радиусах кривизны направляющей конструкции. Эффективность приведенных вариантов выражается показателем перегрузки, которая будет достигнута при реализации данного варианта. При вычислении перегрузки использовалась формула a=v2/r (перегрузка в 1G соответствует ускорению 9,8 мс-2). При расчете перегрузок не учитывались перегрузки, обусловленные влиянием гравитации. Их величина может быть не столь велика из-за низких значений ускорений при движении летательного аппарата по направляющей конструкции. Углы тангажа по направлениям, указанным стрелками, составляют 45°, 67,5° и 90°.
O1Д и O1F). Для упрощения вычислений в качестве точек отсчета радиус OO2 поделен на три части, а дуга O1O2 поделена на четыре части. При определении длины дуг использовалась формула L=2πr. Цифровые значения приведенных параметров округлены, однако дают наглядное представление о размерах стартовой системы при различных радиусах кривизны направляющей конструкции. Эффективность приведенных вариантов выражается показателем перегрузки, которая будет достигнута при реализации данного варианта. При вычислении перегрузки использовалась формула a=v2/r (перегрузка в 1G соответствует ускорению 9,8 мс-2). При расчете перегрузок не учитывались перегрузки, обусловленные влиянием гравитации. Их величина может быть не столь велика из-за низких значений ускорений при движении летательного аппарата по направляющей конструкции. Углы тангажа по направлениям, указанным стрелками, составляют 45°, 67,5° и 90°.
Из приведенных значений параметров можно видеть, что определяющим параметром является радиус кривизны восходящей ветви направляющей конструкции. При r=10000 м и максимальной скорости в точке отсоединения (ТО) летательного аппарата от стартовой платформы, равной 280 м/с (1000 км/час), при высоте конструкции, равной 6666 м, возникающие перегрузки минимальны. Однако реализация стартовой системы с такими размерами сооружения невозможна из-за трудно преодолимых технических сложностей. При уменьшении радиуса кривизны восходящей ветви направляющей конструкции растут перегрузки.
Очевидно, что выбор варианта для реализации будет определяться имеющимися техническими возможностями, при этом потребуется разработка новых конструкций летательных аппаратов и создание мощных линейных электродвигателей.
Приведенная схема доказывает возможность реализации предлагаемой стартовой системы для космических летательных аппаратов.
Примеры
Некоторые варианты параметров предлагаемой стартовой системы для космических летательных аппаратов
1. r=500 м, vто=280 м/с (1000 км/час)
 O1B=457 м
O1B=457 м O1Д=588 м
O1Д=588 м O1F=687 м
O1F=687 м
2. r=1000 м, vто=280 м/с (1000 км/час)
 O1B=980 м
O1B=980 м O1Д=1176 м
O1Д=1176 м O1F=1374 м
O1F=1374 м
3. r=2000 м, vто=280 м/с (1000 км/час)
 O1B=1972 м
O1B=1972 м O1Д=2355 м
O1Д=2355 м O1F=2748 м
O1F=2748 м
4. r=3000 м, vто=280 м/с (1000 км/час)
 O1B=2746 м
O1B=2746 м O1Д=3531 м
O1Д=3531 м O1F=4308 м
O1F=4308 м
5. r=4000 м, vто=280 м/с (1000 км/час)
 O1B=3663 м
O1B=3663 м O1Д=4710 м
O1Д=4710 м O1F=5757 м
O1F=5757 м
6. r=5000 м, vто=280 м/с (1000 км/час)
 O1B=4578 м
O1B=4578 м O1Д=5886 м
O1Д=5886 м O1F=7196 м
O1F=7196 м
7. r=10000 м, vто=280 м/с (1000 км/час)
 O1B=9158 м.
O1B=9158 м.
Изобретение относится к космической технике. В стартовой системе для космических летательных аппаратов старт летательного аппарата, закрепленного на стартовой платформе с электродвигателем, осуществляется из горизонтального положения. Разгонный импульс летательный аппарат получает при движении по направляющей конструкции, имеющей нисходящую и восходящую ветви с радиусами кривизны, обеспечивающими допустимые уровни перегрузок. Направляющая конструкция может содержать прямолинейные участки, располагаться в тоннелях и эстакадах. Стартовая платформа может состоять из двух секций – верхней и нижней. Нижняя секция оборудована электродвигателем, а верхняя секция имеет самолетную конструкцию и имеет складные крылья. Техническим результатом изобретения является экономия топлива на начальном этапе полета космического летательного аппарата. 23 з.п. ф-лы, 2 ил.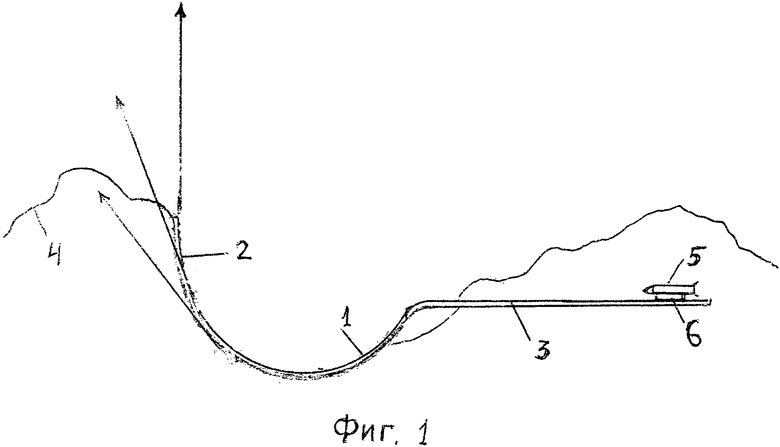
1. Стартовая система для космических летательных аппаратов, в которой разгонный импульс летательный аппарат, закрепленный на стартовой платформе, оборудованной электродвигателем, получает при движении из горизонтального положения по направляющей конструкции, имеющей нисходящую и восходящую ветви, отличающаяся тем, что оптимальная величина радиуса кривизны восходящей ветви направляющей конструкции находится в интервале от 500 до 5000 м, а летательный аппарат на стартовой платформе перемещается с ускорением, обеспечивающим заданную перегрузку.
2. Стартовая система по п. 1, отличающаяся тем, что параметры нисходящей ветви направляющей конструкции могут быть любыми, обеспечивающими получение заданного разгонного импульса.
3. Стартовая система по п. 1, отличающаяся тем, что радиусы кривизны нисходящей и восходящей ветвей направляющей конструкции могут быть различными по величине, при этом первый может быть значительно меньше второго.
4. Стартовая система по п. 1, отличающаяся тем, что восходящая ветвь направляющей конструкции может заканчиваться на любой высоте, обеспечивающей заданный угол тангажа.
5. Стартовая система по п. 1, отличающаяся тем, что отделение летательного аппарата от стартовой платформы и включение ракетного двигателя может осуществляться на любом заданном участке восходящей ветви направляющей конструкции.
6. Стартовая система по п. 1, отличающаяся тем, что направляющая конструкция может содержать прямолинейные участки.
7. Стартовая система по п. 1, отличающаяся тем, что направляющая конструкция может располагаться как в тоннелях, так и на эстакадах.
8. Стартовая система по п. 7, отличающаяся тем, что тоннели могут располагаться как с погружением в земную кору, так и в водоемы.
9. Стартовая система по п. 7, отличающаяся тем, что эстакады и тоннели могут располагаться на склонах возвышенностей.
10. Стартовая система по п. 7, отличающаяся тем, что могут использоваться вакуумированные тоннели.
11. Стартовая система по п. 1, отличающаяся тем, что летательный аппарат может состоять из нескольких параллельно и симметрично расположенных, жестко скрепленных между собой секций с возможностью их поочередного разъединения, закрепленных на соединенных между собой стартовых платформах.
12. Стартовая система по п. 1, отличающаяся тем, что масса летательного аппарата и его секций может быть распределена на возможно большую площадь опорных конструкций.
13. Стартовая система по п. 1, отличающаяся тем, что параллельно расположенные секции летательного аппарата могут выполнять функцию первых ступеней.
14. Стартовая система по п. 1, отличающаяся тем, что стартовая платформа может состоять из двух секций: нижней, оборудованной элементами электродвигателя, и верхней, самолетной конструкции со складывающимися крыльями, способной совершать плавную посадку.
15. Стартовая система по п. 14, отличающаяся тем, что торможение стартовой платформы и ее нижней секции может осуществляться любым известным способом.
16. Стартовая система по п. 14, отличающаяся тем, что посадка верхней секции стартовой платформы может осуществляться на горизонтальную поверхность посадочной полосы.
17. Стартовая система по п. 14, отличающаяся тем, что посадка верхней секции стартовой платформы может осуществляться на наклонную поверхность посадочной полосы.
18. Стартовая система по п. 1, отличающаяся тем, что для торможения стартовой платформы может использоваться участок восходящей ветви направляющей конструкции.
19. Стартовая система по п. 1, отличающаяся тем, что возможно повторное использование стартовой платформы.
20. Стартовая система по п. 1, отличающаяся тем, что разгонный импульс летательный аппарат, расположенный на стартовой платформе, получает как за счет гравитации при движении по нисходящей ветви направляющей конструкции, так и при работе линейного электродвигателя.
21. Стартовая система по п. 1, отличающаяся тем, что при выборе месторасположения стартовой системы и ориентации направляющей конструкции учитывается направление вращения планеты.
22. Стартовая система по п. 1, отличающаяся тем, что выбор параметров системы осуществляется с учетом массы космического тела, с которого осуществляется старт летательного аппарата.
23. Стартовая система по п. 11, отличающаяся тем, что в параллельно расположенных секциях летательного аппарата могут быть размещены запасы компонентов топлива.
24. Стартовая система по п. 1, отличающаяся тем, что система может использоваться для экстренного старта летательного аппарата спасательной службы.
| СИСТЕМА ДЛЯ ЗАПУСКА КОСМИЧЕСКИХ ОБЪЕКТОВ | 2008 |
|
RU2381154C1 |
| А | |||
| Шибанов | |||
| Заботы космического архитектора | |||
| Детская литература | |||
| -М., 1982, с.13-17 | |||
| СПОСОБ ЗАПУСКА ЛЕТАТЕЛЬНОГО АППАРАТА С ПОМОЩЬЮ СТАРТОВОЙ ТЕЛЕЖКИ С ЭЛЕКТРО-МАГНИТНЫМ ПРИВОДОМ | 1991 |
|
RU2046070C1 |
| US 3134300 A, 26.05.1964 | |||
| US 4881446 A, 21.11.1989 | |||
| US 6311926 B1, 06.11.2001. | |||

