Изобретение относится к области приборостроения, а именно к бортовым цифровым программно-аппаратным средствам, установленным на подвижных объектах и обеспечивающим прием и обработку информации, поступающей с приборов и систем объекта, решение задач навигации и топопривязки, сервисных задач, а также выдачу информации в формализованной форме на устройства отображения, передачи и хранения информации.
Известен программно-аппаратный комплекс топопривязчика (см. Патент RU №2573247 С1, G06F 19/00, G01C 21/00, 02.09.2016 г.), принятый за прототип. Программно-аппаратный комплекс топопривязчика содержит бортовую цифровую вычислительную машину, устройства, обеспечивающие взаимосвязь с бортовым оборудованием, программно-алгоритмические средства, блок согласования, периферийное устройство. В качестве бортовой цифровой вычислительной машины используется моноблочный панельный компьютер, а в качестве периферийного устройства - моноблочный панельный монитор. Программно-аппаратный комплекс оснащен системой автоматизированного встроенного контроля работоспособности систем и сборочных единиц, входящих в состав программно-аппаратного комплекса и топопривязчика, с возможностью отображения следующей информации о текущем состоянии систем и сборочных единиц на мониторе панельного компьютера в режиме «Состояние»: текущие данные топопривязчика и текущее состояние соответственно по данным бесплатформенной инерциальной навигационной системы, аппаратуры спутниковой навигации, системы определения высоты, текущее состояние датчика скорости доплеровского, механического датчика скорости, блока согласования и аппаратуры передачи данных, системой звукового оповещения о возникновении каких-либо событий, возникающих в самом комплексе или в системах, связанных с ним: голосовое подтверждение возникших оперативных сообщений о возникших неисправностях, о готовности топопривязчика к движению после запуска режима гирокомпасирования бесплатформенной инерциальной навигационной системы, рекомендуемой скорости движения и изменения направления движения, голосовое сообщение о местонахождении топопривязчика на маршруте, проложенном на цифровой карте местности. Программно-алгоритмические средства выполнены с возможностью выполнения задачи по определению и контролю поправки для работы с установленным на топопривязчике визиром, которая вводится в панельный компьютер, значений коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок (поправок в углы) этих датчиков, характеризующих проекции динамических осей топопривязчика относительно бесплатформенной инерциальной системы, значений поправок для определения крена и тангажа, значений поправки на местное время.
Недостатками прототипа являются:
- недостаточное удобство при работе с компьютером в различных режимах;
- ограниченное число периферийных устройств, которые можно подключить к панельному компьютеру;
- высокая вероятность совершения экипажем ошибочных действий при длительной работе.
Предлагаемым изобретением решается задача по повышению эффективности, надежности, точности и удобства эксплуатации подвижных пунктов навигации и топопривязки.
Технический результат, получаемый при осуществлении изобретения, заключается в создании программно-аппаратных средств комплекса топопривязки и навигации, обеспечивающих подключение необходимого количества периферийных устройств, прием и обработку информации, поступающей от соответствующих устройств топопривязчика, высокое качество проведения автоматизированного определения и контроля работоспособности и калибровки его приборов и систем, дополнительные возможности по концентрации внимания экипажа.
Указанный технический результат достигается тем, что в предлагаемых программно - аппаратных средствах комплекса топопривязки и навигации, содержащих моноблочный панельный компьютер, панельный монитор, систему автоматизированного встроенного контроля работоспособности с возможностью отображения информации о текущем состоянии составных частей на мониторе панельного компьютера, систему звукового оповещения о возникновении каких-либо событий в топопривязчике, программно - алгоритмические средства, выполненные с возможностью выполнения задачи по определению и контролю поправок, необходимых для обеспечения необходимой точности определения топогеодезических параметров, новым является то, что моноблочный панельный компьютер оснащен системой обогрева, выполненной с возможностью автоматического включения при температуре окружающей среды от минус 5°С и ниже и запуска операционной системы в данном режиме через пять минут после включения панельного компьютера, двумя каналами интерфейса USB, каналом Ethernet, последовательным каналом обмена RS-232 с гальванической развязкой, обеспечивающим прохождение всего набора сигналов, пятью последовательными каналами обмена RS-232 с гальванической развязкой, обеспечивающими прохождение набора сигналов T×D и R×D, последовательными каналом обмена RS-485 с гальванической развязкой, дискретными вводом и выводом, каналом интерфейса PS/2 для подключения клавиатуры и манипулятора, двумя каналами выхода на правый и левый внешние динамики, моноблочный панельный монитор выполнен с возможностью получения и отображения видеосигнала по каналам DVI и VGA, обеспечения связи с внешними устройствами по каналу RS-232, выполнения функций, определяемых программным обеспечением при нажатии функциональных клавиш, прогрева до температуры эксплуатации, при отображении информации системы автоматизированного встроенного контроля работоспособности о текущем состоянии составных частей на мониторе панельного компьютера в режиме «Состояние» весь массив информации разделен на разделы по фактической принадлежности, в которых определены конкретные оперативные сообщения в соответствии с реальным состоянием составной части, система автоматизированного встроенного контроля выполнена с возможностью непрерывного автоматического контроля во всех режимах работы программно-аппаратных средств, голосовые сообщения системы звукового оповещения функционально разделены на несколько разделов: звуковые оповещения о месторасположении топопривязчика и об отклонении от проложенного маршрута, звуковые оповещения о готовности топопривязчика к движению, звуковые оповещения об отказах составных частей, значения определенных или откорректированных поправок визира, значения коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок этих датчиков, значения поправок определения крена и тангажа, значения поправки на местное время сведены в рабочем окне вкладки «Поправки», при вводе программно-аппаратных средств в эксплуатацию проводится регулирование и настройка изделия в объеме задачи «Калибровка», для выявления скрытых дефектов проводится технологическая приработка.
Оснащение моноблочного панельного компьютера системой обогрева, выполненной с возможностью автоматического включения при температуре окружающей среды от минус 5°С и ниже и запуска операционной системы в данном режиме через пять минут после включения панельного компьютера, позволяет:
- осуществлять эксплуатацию панельного компьютера в полевых условиях при пониженной температуре;
- продлить срок службы панельного компьютера.
Оснащение моноблочного панельного компьютера двумя каналами USB, каналом Ethernet, последовательными каналами RS-232 и RS-485, дискретными вводом и выводом, двумя выходами на внешние динамики позволяет:
- осуществлять подключение периферийных устройств к панельному компьютеру;
- обеспечить выдачу звуковых оповещений для оператора;
- обеспечить получение, обработку и выдачу информации в сформированной системе топопривязки и навигации.
Выполнение моноблочного панельного монитора с возможностью получения и отображения видеосигнала по каналам DVI и VGA, обеспечения связи с внешними устройствами по каналу RS-232, выполнения функций, определяемых программным обеспечением при нажатии функциональных клавиш, прогрева до температуры эксплуатации позволяет:
- обеспечить получение и отображение по каналам DVI и VGA цифровых карт местности;
- обеспечить связь с внешними устройствами по каналу RS-232;
- обеспечить реализацию установленного программного обеспечения;
- осуществлять эксплуатацию панельного монитора в полевых условиях при пониженной температуре.
Деление в режиме «Состояние» всего массива информации на разделы по фактической принадлежности, в которых определены конкретные оперативные сообщения в соответствии с реальным состоянием составной части позволяет:
- определить состояние бесплатформенной инерциальной навигационной системы, аппаратуры спутниковой навигации, системы определения высоты, механического и доплеровского датчиков, блока согласования, аппаратуры передачи данных;
- определить причину отказа и в дальнейшем восстановить функционирование изделия.
Выполнение системы автоматизированного встроенного контроля с возможностью непрерывного автоматического контроля во всех режимах работы программно-аппаратных средств позволяет вести непрерывный контроль состояния составных частей.
Деление голосовых сообщений системы звукового оповещения на несколько разделов позволяет:
- при введенных координатах пункта назначения определить расстояние до него;
- определить состояние режима выставки и калибровки;
- определить наличие отказов и обмена с составными частями топопривязчика;
- облегчить работу оператора.
Сведение значений определенных или откорректированных поправок и коэффициентов в рабочем окне вкладки «Поправки» позволяет упростить и облегчить работу с компьютером.
Проведение при вводе программно-аппаратных средств в эксплуатацию технологической приработки, регулирования и настройки изделия в объеме задачи «Калибровка» позволяет:
- выявить скрытые дефекты изделия;
- снизить до минимальных значений погрешность определения топогеодезических данных.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
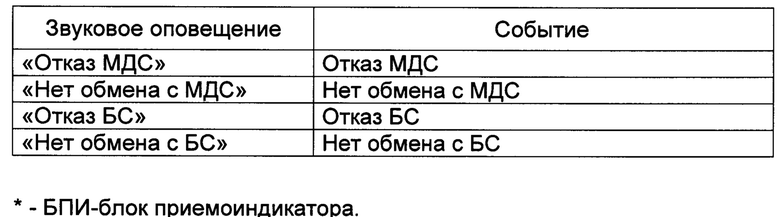
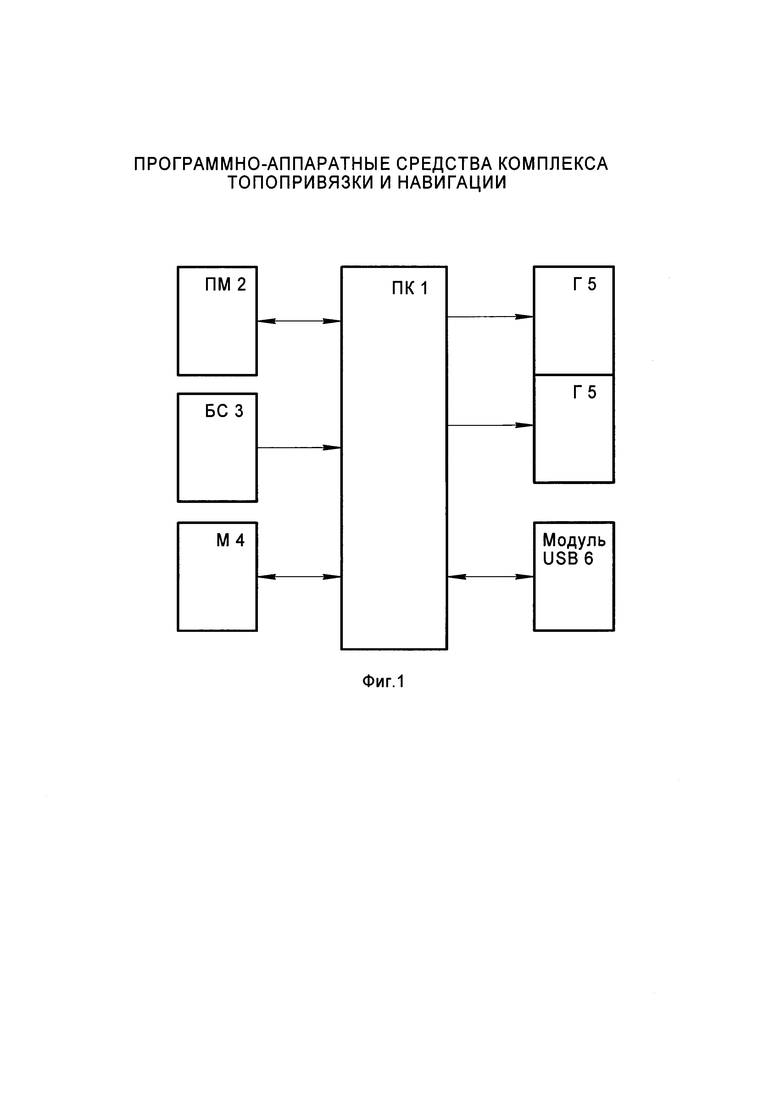
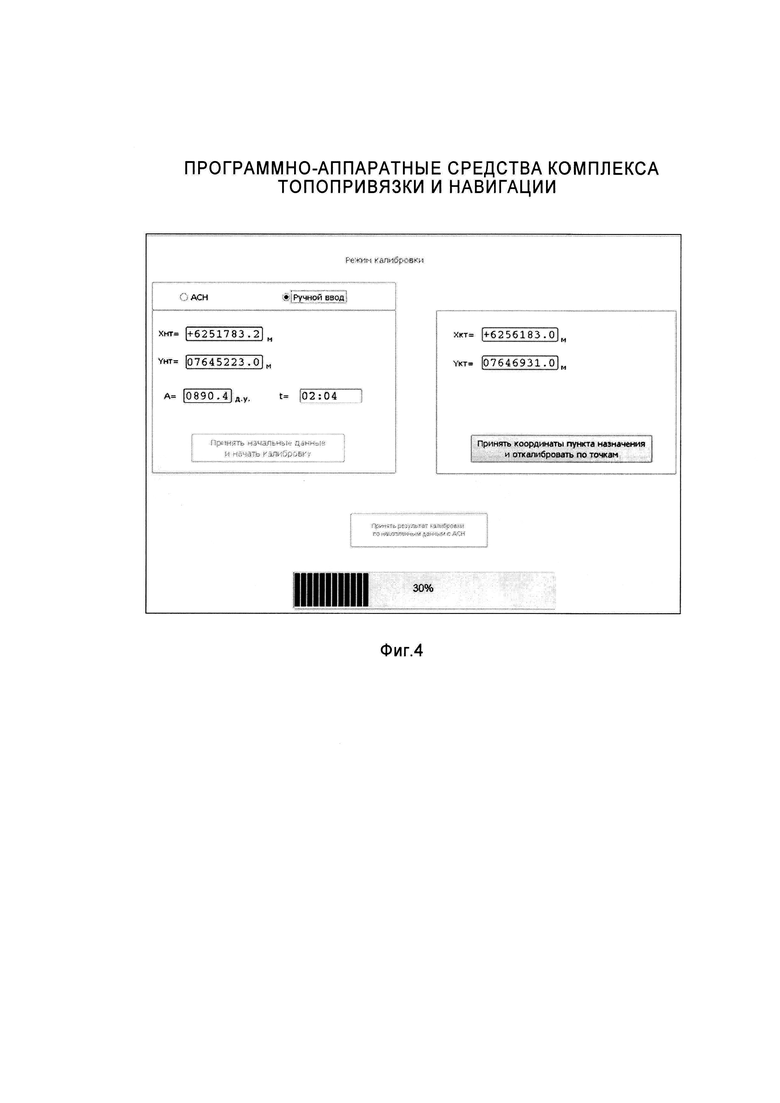
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема программно-аппаратных средств комплекса топопривязки и навигации; на фиг. 2 - рабочее окно пункта меню «Состояние»; на фиг. 3 - рабочее окно вкладки «Поправки», на фиг. 4 - рабочее окно задачи «Калибровка».
Программно-аппаратные средства комплекса топопривязки и навигации содержат панельный компьютер (ПК) 1, панельный монитор (ПМ) 2, блок согласования (БС) 3, манипулятор (М) 4, два громкоговорителя (Г) 5, модуль USB 6.
Программно-аппаратные средства комплекса топопривязки и навигации функционируют следующим образом. Работа программно-аппаратных средств построена на обработке входных данных, поступающих с приборов и систем объекта. Причем работа возможна в режиме выполнения навигационных задач, в режиме работы с цифровыми картами местности, в режиме решения сервисных задач, в режиме технического обслуживания. При этом обеспечивает контроль технического состояния приборов и систем, вывод (запись) результатов на устройство документирования и передачу на ССПД результатов обработки входных данных.
Основным элементом программно-аппаратных средств является ПК 1. ПК 1 предназначен для обработки и отображения информации. Во время эксплуатации при температуре окружающей среды от минус 5°С и ниже автоматически включается режим обогрева, при этом на лицевой панели загорается индикатор режима. Запуск операционной системы при работе в режиме обогрева происходит через 5 минут после включения ПК 1. После включения ПК 1 следует проверить корректность исполнения команд. выполняемых при нажатии функциональных клавиш на лицевой панели.
Два канала интерфейса USB в ПК 1 могут быть использованы для подключения дополнительных устройств, в частности дополнительных накопительных устройств. Канал Ethernet, при необходимости, в частности при модернизации программно-аппаратных средств, может использоваться как дополнительный канал связи. По каналам RS-232, RS-485 происходит основной информационный обмен между ПК 1 и составными частями объекта, в частности комплекса топопривязки и навигации, что позволяет обеспечить функционирование объекта в режиме выполнения задач по назначению. Дискретный ввод обеспечивает 16 дискретных входов под «сухой контакт» и 4 дискретных потенциальных входа под открытый коллектор. Дискретный вывод обеспечивает 6 силовых дискретных выходов с обеспечением питания потребителей, U=<30B, I=1А. Канал интерфейса PS/2 обеспечивает подключение клавиатуры и манипулятора, питание потребителей папряжением +5В. Два канала выхода на правый и левый внешние динамики обеспечивают «звук-аудио» на нагрузку 8 Ом.
ПМ 2 представляет собой устройство отображения текстовой и графической информации.
ПМ 2 обеспечивает:
- получение и отображение видеосигнала по каналам DVI и VGA;
- связь с внешними устройствами по каналу RS-232;
- выполнение функций, определяемых программным обеспечением, при нажатии функциональных клавиш;
- отображение информации на экране;
- управление яркостью экрана;
- прогрев до температуры эксплуатации.
БС 3 используется для обеспечения подключения первичных навигационных датчиков (механического и доплеровского датчиков скорости) объекта к изделию. БС 3 обеспечивает управление работой датчиков, прием и первичную обработку (преобразование) поступающей с них информации, передачу обработанных данных в ПК 1 по интерфейсу RS-232, а также выработку необходимых для работы датчиков напряжений питания.
Внешние Г 5 предназначены для выдачи звуковых оповещений.
Модуль USB 6 используется в качестве носимого электронного накопителя и обеспечивает запись, долговременное хранение и чтение данных.
При отображении информации системы автоматизированного встроенного контроля работоспособности о текущем состоянии составных частей комплекса топопривязки и навигации на мониторе ПК 1 в режиме «Состояние» весь массив информации разделен на разделы по фактической принадлежности, в которых определены конкретные оперативные сообщения в соответствии с реальным состоянием составной части. При включении аппаратуры комплекса топопривязки и навигации при отсутствии неисправностей на экраны ПК 1 и ПМ 2 выводится основное окно. При включении происходит автоматический запуск программного обеспечения. Управление режимами работы изделия осуществляется оператором с помощью клавиатуры ПК 1 и М 4. При выборе пункта меню «Состояния» выводится рабочее окно, предназначенное для отображения информации о текущем состоянии систем и сборочных единиц, входящих в состав объекта, а также текущих значений входных и выходных данных.
В разделе «Данные СН» отображаются текущие данные объекта по данным бесплатформенной инерциальной навигационной системы (БИНС):
- координаты X, Y, м;
- дирекционный угол продольной оси шасси объекта α, д.у.;
- продольный β (крен) и поперечный ψ (тангаж) углы наклона, д.у.;
- текущий пройденный путь S, м;
- скорость V, км/с;
- состояние БИНС.
В разделе «Данные АСН» отображаются текущие данные объекта по данным аппаратуры спутниковой навигации (АСН):
- координаты X, Y, м;
- высота Н, м;
- среднеквадратическая ошибка СКО, м;
- дирекционный угол продольной оси объекта α, д.у., продольный β (крен) и поперечный ψ (тангаж) углы наклона, д.у.;
- состояние АСН.
В разделе «Данные СОВ» отображаются текущие данные объекта по данным системы определения высоты (СОВ):
- высота объекта Н, м;
- состояние СОВ.
В разделах «ДДС», «МДС», «БС», «АПД» отображаются текущие состояния доплеровского датчика скорости, механического датчика скорости, БС 3, аппаратуры передачи данных.
Также в окне «Состояния» отображаются:
- дальность до пункта назначения D, м;
- угол доворота объекта на пункт назначения АПН, д.у.;
- время работы изделия с момента включения в формате «ЧЧ:ММ:СС», где «ЧЧ», «ММ», «СС» - поля отображения часов, минут, секунд;
- текущие дата и время в формате «ДД.ММ.ГГГГ ЧЧ:ММ:СС», где «ДД», «ММ», «ГГГГ» - поля отображения дня, месяца, года, «ЧЧ», «ММ», «СС» - поля отображения часов, минут, секунд;
- общее время наработки, ч.
В верхнем левом углу окна «Состояния» отображается текущий режим работы изделия:
- «Работа»;
- «Калибровка».
В верхнем правом углу окна «Состояния» отображается текущая система координат:
- «ПЗ-90»;
- «СК-42»;
- «WGS-84».
В нижней строке окна «Состояния» выводится контрольная сумма программного обеспечения КСПО.
Система автоматизированного встроенного контроля выполнена с возможностью непрерывного автоматического контроля во всех режимах работы программно-аппаратных средств, что обеспечивает постоянный сквозной контроль составных частей.
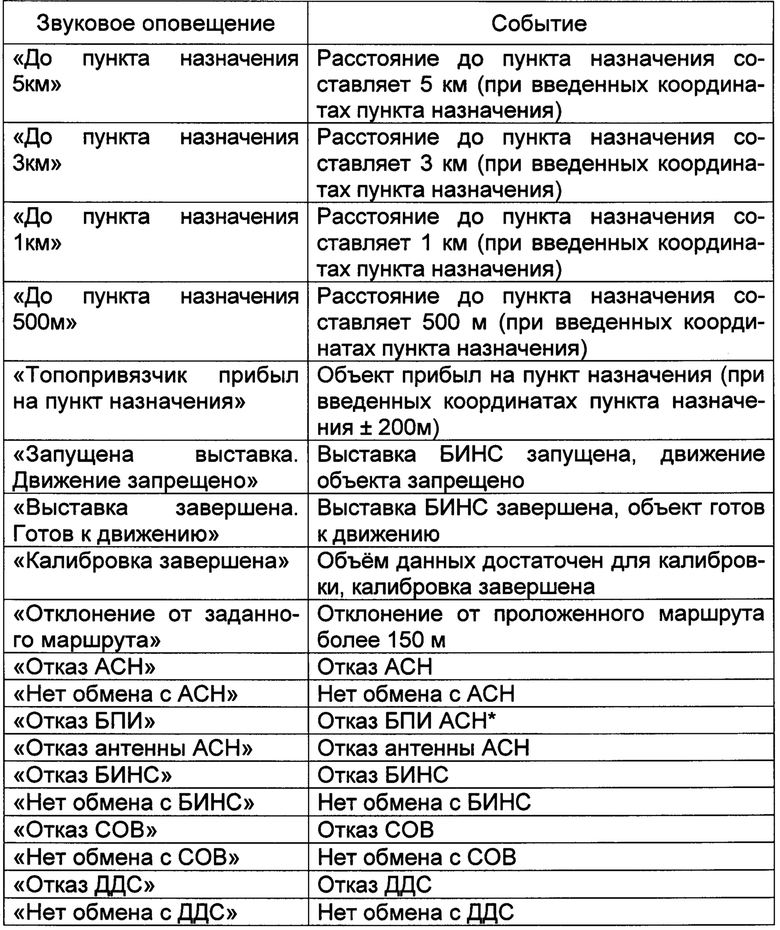
Голосовые сообщения системы звукового оповещения функционально разделены на несколько разделов: звуковые оповещения о месторасположении топопривязчика и об отклонении от проложенного маршрута, звуковые оповещения о готовности топопривязчика к движению, звуковые оповещения об отказах составных частей, которые приведены в таблице.
Значения определенных или откорректированных поправок визира, значения коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок этих датчиков, значения поправок определения крена и тангажа, значения поправки на местное время сведены в рабочем окне вкладки «Поправки». Вкладка "Поправки" предназначена для контроля и изменения значений коэффициентов корректуры механического и доплеровского датчиков скорости, угловых поправок (поправок в углы) МДС и ДДС, характеризующих проекции динамических осей объекта относительно БИНС, а также для контроля и изменения значений поправок определения крена и тангажа, поправки визира и поправки на местное время.
При вводе программно-аппаратных средств в эксплуатацию проводится регулирование и настройка изделия в объеме задачи «Калибровка». Рабочее окно задачи «Калибровка» состоит из:
- поля выбора источника информации о координатах начальной точки:
- «АСН» - в качестве координат начальной точки используются координаты, полученные с АСН.
- «Ручной ввод» - ввод значений ХНТ, YHT осуществляется оператором;
- полей ввода дирекционного угла, координат конечной точки;
- поля отображения обратного отсчета времени окончания определения дирекционного угла;
- индикатора прогресса калибровки, предназначенного для калибровки по данным с АСН. Для проведения калибровки используется трасса с известными координатами начальной и конечной точек.
Для выявления скрытых дефектов программно-аппаратных средств проводится их технологическая приработка. Технологическая приработка программно-аппаратных средств проводится тремя восьмичасовыми циклами. Технологическую приработку проводят в режиме имитации работы. В начале первого цикла на стенде собирают сборочные единицы. На сборочные единицы изделия подают напряжение. После появления на экране ПК 1 рабочего окна выбирают пункт меню «Состояние». Контролируют отсутствие оперативных сообщений об отказах составных частей изделия. Изделие оставляют во включенном состоянии 8 ч. Проводят периодический контроль индикации. Выключают изделие. Допускается перерыв между циклами. Последующие два восьмичасовых цикла проводят аналогично первому. В случае отказа, обнаруженного в процессе приработки, проводят анализ отказа изделия. По результатам анализа определяют порядок дальнейших работ.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании программно-аппаратных средств комплекса топопривязки и навигации, обеспечивающих подключение необходимого количества периферийных устройств, прием и обработку информации, поступающей от соответствующих устройств топопривязчика, высокое качество проведения автоматизированного определения и контроля работоспособности и калибровки его приборов и систем, дополнительные возможности по концентрации внимания экипажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС | 2014 |
|
RU2573247C1 |
| ТОПОПРИВЯЗЧИК | 2015 |
|
RU2591113C1 |
| Автоматизированное рабочее место для обучения расчета топопривязчика | 2017 |
|
RU2659869C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| Способ приема и передачи топопривязчиком дифференциальных поправок | 2017 |
|
RU2657337C1 |
| НАВИГАЦИОННО-ИНФОРМАЦИОННАЯ СИСТЕМА ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ | 2007 |
|
RU2365061C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
Изобретение относится к области приборостроения, а именно к бортовым цифровым программно-аппаратным средствам, установленным на подвижных объектах и обеспечивающим прием и обработку информации, поступающей с приборов и систем объекта, решение задач навигации и топопривязки, сервисных задач, а также выдачу информации в формализованной форме на устройства отображения, передачи и хранения информации. Технический результат - расширение функциональных возможностей на основе создания программно-аппаратных средств комплекса топопривязки и навигации, обеспечивающих подключение необходимого количества периферийных устройств, прием и обработку информации, поступающей от соответствующих устройств топопривязчика, высокое качество проведения автоматизированного определения и контроля работоспособности и калибровки его приборов и систем, дополнительные возможности по концентрации внимания экипажа. Для этого программно-аппаратные средства комплекса топопривязки и навигации содержат моноблочный панельный компьютер, панельный монитор, систему автоматизированного встроенного контроля работоспособности с возможностью отображения информации о текущем состоянии составных частей на мониторе панельного компьютера, систему звукового оповещения о возникновении каких-либо событий в топопривязчике, программно-алгоритмические средства, выполненные с возможностью выполнения задачи по определению и контролю поправок, необходимых для обеспечения необходимой точности определения топогеодезических параметров, моноблочный панельный компьютер оснащен системой обогрева, выполненной с возможностью автоматического включения при температуре окружающей среды от минус 5°С и ниже и запуска операционной системы в данном режиме через пять минут после включения панельного компьютера, двумя каналами интерфейса USB, каналом Ethernet, последовательным каналом обмена RS-232 с гальванической развязкой, обеспечивающим прохождение всего набора сигналов, пятью последовательными каналами обмена RS-232 с гальванической развязкой, обеспечивающими прохождение набора сигналов T×D и R×D, последовательным каналом обмена RS-485 с гальванической развязкой, дискретными вводом и выводом, каналом интерфейс PS/2 для подключения клавиатуры и манипулятора, двумя каналами выхода на правый и левый внешние динамики, моноблочный панельный монитор выполнен с возможностью получения и отображения видеосигнала по каналам DVI и VGA, обеспечения связи с внешними устройствами по каналу RS-232, выполнения функций, определяемых программным обеспечением при нажатии функциональных клавиш, прогрева до температуры эксплуатации, при отображении информации системы автоматизированного встроенного контроля работоспособности о текущем состоянии составных частей на мониторе панельного компьютера в режиме «Состояние» весь массив информации разделен на разделы по фактической принадлежности, в которых определены конкретные оперативные сообщения в соответствии с реальным состоянием составной части, система автоматизированного встроенного контроля выполнена с возможностью непрерывного автоматического контроля во всех режимах работы программно-аппаратных средств, голосовые сообщения системы звукового оповещения функционально разделены на несколько разделов: звуковые оповещения о месторасположении топопривязчика и об отклонении от проложенного маршрута, звуковые оповещения о готовности топопривязчика к движению, звуковые оповещения об отказах составных частей, значения определенных или откорректированных поправок визира, значения коэффициентов механического датчика скорости и доплеровского датчика скорости, угловых поправок этих датчиков, значения поправок определения крена и тангажа, значения поправки на местное время сведены в рабочем окне вкладки «Поправки», при вводе программно-аппаратных средств в эксплуатацию проводится регулирование и настройка изделия в объеме задачи «Калибровка», для выявления скрытых дефектов проводится технологическая приработка. 4 ил.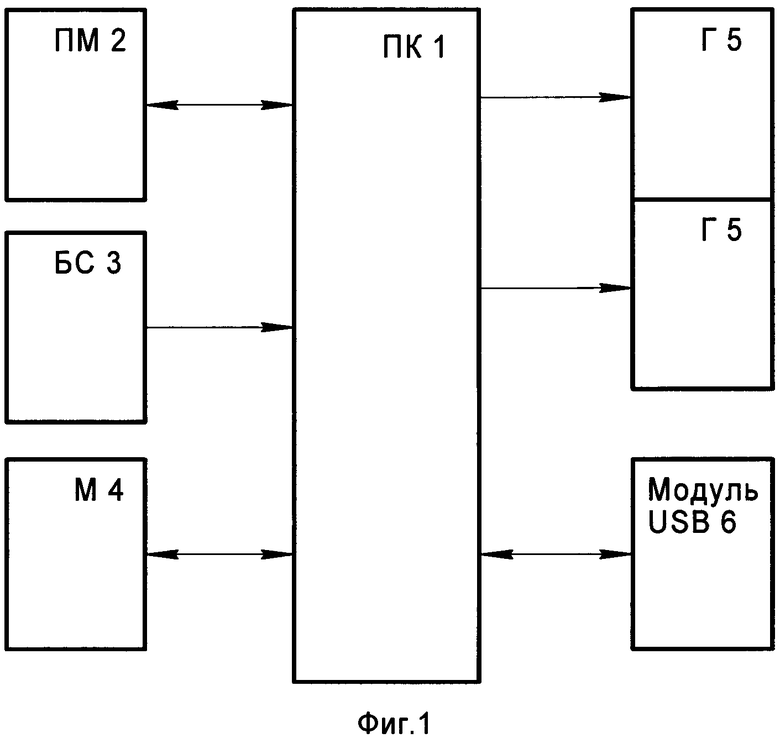
Программно-аппаратные средства комплекса топопривязки и навигации, содержащие моноблочный панельный компьютер, панельный монитор, систему автоматизированного встроенного контроля работоспособности с возможностью отображения информации о текущем состоянии составных частей на мониторе панельного компьютера, систему звукового оповещения о возникновении каких-либо событий в топопривязчике, программно-алгоритмические средства, выполненные с возможностью выполнения задачи по определению и контролю поправок, необходимых для обеспечения необходимой точности определения топогеодезических параметров, отличающиеся тем, что моноблочный панельный компьютер оснащен системой обогрева, выполненной с возможностью автоматического включения при температуре окружающей среды от минус 5°C и ниже и запуска операционной системы в данном режиме через пять минут после включения панельного компьютера, двумя каналами интерфейса USB, каналом Ethernet, последовательным каналом обмена RS-232 с гальванической развязкой, обеспечивающим прохождение всего набора сигналов, пятью последовательными каналами обмена RS-232 с гальванической развязкой, обеспечивающими прохождение набора сигналов T×D и R×D, последовательным каналом обмена RS-485 с гальванической развязкой, дискретными вводом и выводом, каналом интерфейс PS/2 для подключения клавиатуры и манипулятора, двумя каналами выхода на правый и левый внешние динамики, моноблочный панельный монитор выполнен с возможностью получения и отображения видеосигнала по каналам DVI и VGA, обеспечения связи с внешними устройствами по каналу RS-232, выполнения функций, определяемых программным обеспечением при нажатии функциональных клавиш, прогрева до температуры эксплуатации, при отображении информации системы автоматизированного встроенного контроля работоспособности о текущем состоянии составных частей на мониторе панельного компьютера в режиме «Состояние» весь массив информации разделен на разделы по фактической принадлежности, в которых определены конкретные оперативные сообщения в соответствии с реальным состоянием составной части, система автоматизированного встроенного контроля выполнена с возможностью непрерывного автоматического контроля во всех режимах работы программно-аппаратных средств, голосовые сообщения системы звукового оповещения функционально разделены на несколько разделов: звуковые оповещения о месторасположении топопривязчика и об отклонении от проложенного маршрута, звуковые оповещения о готовности топопривязчика к движению, звуковые оповещения об отказах составных частей, значения определенных или откорректированных поправок визира, значения коэффициентов механического датчика скорости и доплеровского
датчика скорости, угловых поправок этих датчиков, значения поправок определения крена и тангажа, значения поправки на местное время сведены в рабочем окне вкладки «Поправки», при вводе программно-аппаратных средств в эксплуатацию проводится регулирование и настройка изделия в объеме задачи «Калибровка», для выявления скрытых дефектов проводится технологическая приработка.
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС | 2014 |
|
RU2573247C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| US 5237952 A, 24.08.1993 | |||
| БОТУЗ С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| - М.: ИПРЖ "Радиотехника", 1998, 21 с. | |||

