Изобретение относится к военной и специальной технике и может быть использовано в подвижных пунктах навигации и топогеодезической привязки на базе шасси транспортных средств, являющихся их транспортной, энергетической и информационно-аналитической базой.
Известен унифицированный мобильный командирский пункт (см. свидетельство на полезную модель RU №29600 U1, G06F 13/00, H04В 7/00, опубл. 20.05.03 г.), который предназначен для автоматизированного управления в движении и на стоянке действиями подразделений противовоздушной обороны и содержит следующие комплексы:
- вычислительный комплекс с программным обеспечением - программно-аппаратный комплекс (ПАК);
- аппаратура навигации, топопривязки и ориентирования;
- средства регистрации и документирования;
- комплекс средств связи и передачи данных;
- система электропитания;
- комплекс средств жизнеобеспечения;
- шасси.
Программно-аппаратный комплекс включает:
- два системных блока ЭВМ «Багет» с набором дополнительных модулей, обеспечивающих сопряжение ЭВМ с периферийными устройствами;
- накопители на жестком магнитном диске для хранения рабочих программ и регистрации процессов обмена и обработки информации;
- два унифицированных автоматизированных рабочих места в составе: цветной жидкокристаллический монитор, клавиатура и шаровый манипулятор;
- выносное автоматизированное рабочее место в составе: ЭВМ «Багет» (типа notebook), блок автономных источников питания, блок расширения интерфейсов, блок адаптера сети переменного тока;
- выносной блок сопряжения с радиолокационной станцией. Аппаратура навигации, топопривязки и ориентирования включает:
- навигационная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС и GPS в составе: приемоиндикатор, блок антенный;
- танковая навигационная аппаратура в составе: гирокурсоуказатель, пульт управления, преобразователь напряжения, механический датчик скорости, координатор, планшет индикаторный, курсоуказатель, коробка распределительная;
- оборудование для дистанционной привязки - перископическая артиллерийская буссоль, визир ориентирования.
К средствам регистрации и документирования относятся:
- диктофон для регистрации речевой информации;
- печатающее устройство для документирования и тиражирования результатов.
В комплекс средств связи и передачи данных входят:
- рабочее место оператора средств связи;
- аппаратура внутренней связи и коммутации;
- два комплекта приемопередатчиков, предназначенные для организации двух открытых каналов обмена;
- многоканальная аппаратура передачи данных(АПД);
- две радиостанции и семь радиоприемников ультракоротковолнового диапазона, предназначенных для обмена с вышестоящими, взаимодействующими и подчиненными командными пунктами или боевыми машинами;
- антенно-мачтовое устройство;
- комплекс проводной связи.
В систему электропитания входят:
- электроагрегат дизельный;
- выпрямительное устройство;
- пульт и распределительные коробки;
- защитно-отключающее устройство;
- выключатель массы;
- аккумуляторная батарея;
- фильтр;
- система электропитания шасси.
В состав комплекса жизнеобеспечения входят:
- отопительно-вентиляционная установка ОВ-65:
- вентиляторы индивидуального обдува;
- фильтро-вентиляционная установка ФВУА-100Н-24;
- измеритель мощности дозы ИМД-21Б;
- автомобильный комплект для специальной обработки;
- войсковой прибор химической разведки ВПХР;
- светильники;
- бортовой комплект специальной обработки.
Недостатками прототипа являются:
- высокая погрешность измеряемых топогеодезических параметров;
- недостаточное количество оборудования для дистанционной привязки;
- низкая точность начального ориентирования;
- недостаточно развитая инфраструктура систем жизнеобеспечения и бытового обеспечения, снижающая возможности использования топопривязчика в условиях длительной эксплуатации;
- высокая сложность унифицированного мобильного командирского пункта.
Предлагаемым изобретением решается задача по повышению боевой эффективности подвижных пунктов навигации и топогеодезической привязки.
Технический результат, получаемый при осуществлении изобретения, заключается в создании мобильного комплекса навигации и топогеодезической привязки, обладающего высоким энергетическим, информационно-аналитическим потенциалом, возможностью мобильного перемещения по всем типам дорог за счет применения автошасси повышенной проходимости, навигационной аппаратуры, вспомогательных приборов и оборудования нового поколения, соответствующих требованиям, предъявляемым к современным образцам вооружений, повышения комфортности при эксплуатации, что позволит повысить боеготовность и боеспособность вооруженных сил в целом.
Указанный технический результат достигается тем, что в предлагаемом мобильном комплексе навигации и топогеодезической привязки, содержащем транспортную базу, технические средства комплекса топопривязки и навигации в составе программно-аппаратного комплекса (ПАК), оснащенного вычислительными средствами (ВС) с набором дополнительных модулей и автоматизированными рабочими местами, программным обеспечением и средствами регистрации и документирования, навигационную аппаратуру потребителей спутниковых навигационных систем, автономную аппаратуру топопривязки и навигации (ААТН), оснащенную датчиком скорости механическим (ДСМ), оборудование для дистанционной привязки, комплекс средств связи и аппаратуры передачи данных (АПД), систему электропитания и комплекс жизнеобеспечения, новым является то, что в качестве транспортной базы используется транспортное средство повышенной проходимости, оснащенное кузовом-фургоном, в комплексе топопривязки и навигации (КТН) в качестве автономной аппаратуры топопривязки и навигации используется бесплатформенная инерциальная навигационная система (БИНС-ТП), в состав КТН дополнительно введены: выносная угломерная навигационная аппаратура потребителей ГЛО-НАСС/Навстар (ВУНАП), датчик скорости доплеровский (ДСД), система определения высоты (СОВ), контрольно-корректирующая станция мобильной дифференциальной подсистемы ГЛОНАСС/GPS, связанная через АПД и средства связи - с внешними потребителями корректирующей информации, ДСМ, ДСД, СОВ, навигационная аппаратура потребителей спутниковых навигационных систем, БИНС-ТП связаны с ВС ПАК (см. фиг.6), в состав оборудования для дистанционной привязки (ОДП) дополнительно введены: теодолит (Т), лазерный дальномер (ЛД), гирокомпас (ГК), средства связи дополнительно укомплектованы двумя носимыми радиостанциями (НРС).
Использование в качестве транспортной базы транспортного средства повышенной проходимости, оснащенного кузовом-фургоном, позволяет:
- во-первых, выполнить требования по составу и размещению необходимой аппаратуры и оборудования;
- во-вторых, обеспечить соответствие грузоподъемности автошасси и массы аппаратуры и оборудования;
- в-третьих, обеспечить необходимые функциональные возможности для работы четырем членам экипажа;
- в-четвертых, обеспечить мобильность и проходимость комплекса при различных условиях дорожного покрытия;
- в-пятых, обеспечить подключение дополнительного энергетического оборудования;
- в-шестых, обеспечить автономное преодолевание сильно загрязненных и разрушенных участков дороги.
Включение в состав комплекса топопривязки и навигации программно-аппаратного комплекса (ПАК), содержащего вычислительные средства (ВС), средства отображения информации (СОИ), средства ввода, передачи и хранения информации (СВПХИ), позволяет:
- во-первых, обеспечить прием и обработку информации, поступающей со следующих устройств: БИНС-ТП (ААТН), датчик скорости механический ДСМ, датчик скорости доплеровский ДСД, система определения высоты СОВ, стационарная и выносная навигационная аппаратура потребителей ГЛОНАСС/GPS, аппаратура передачи данных АПД, устройство документирования (УД) (принтер);
- во-вторых, обеспечить отображение текущей информации и результатов ее обработки;
- в-третьих, обеспечить комплексирование навигационной информации, полученной с датчиков, построение которых основано на различных физических принципах;
- в-четвертых, обеспечить решение сервисных задач;
- в-пятых, обеспечить решение задач дистанционной привязки элементов боевых порядков войск, работы с геодезической информационной системой «Интеграция» с возможностью подготовки карт и передачи их потребителям, решения задач маршрутизации.
ВС ПАК представлены следующими устройствами.
Построение информационно-вычислительных систем, обеспечивающих возможность реализации современных информационных технологий и работу МКНТП в заданных условиях эксплуатации, осуществляется на базе ЭВМ серии "Багет", дополнительных модулей и функциональных устройств (в том числе периферийных).
В качестве основной бортовой ЭВМ (БЭВМ) выбрана "Багет-РСЗБ". ЭВМ "Багет-РСЗБ" представляет собой высокопроизводительную электронную вычислительную машину, предназначенную для решения коммуникационных, информационных и расчетных задач в составе специализированных автоматизированных систем управления мобильного базирования, а также создания на ее основе программно-технических комплексов требуемой конфигурации под управлением операционной системы реального времени.
Основные технические характеристики ЭВМ "Багет-РС4":
- тип микропроцессора - Комдив-64СМП;
- тактовая частота - не менее 200 МГц;
- емкость динамического ОЗУ модуля ЦП - не менее 256 Мбайт;
- емкость накопителя на жестком магнитном диске - не менее 6 Гбайт;
- емкость видео-ОЗУ - не менее 16 Мбайт.
Персональная портативная ЭВМ (ППЭВМ) ЕС1866 в составе ВС ПАК МКНТП предназначена для организации командиром визуального контроля полученных результатов, проведения необходимых расчетов, работы в информационных сетях и создания базовых средств автоматизации индивидуального труда.
Основные технические характеристики персональной портативной ЭВМ ЕС 1866:
- тип микропроцессора - Intel Mobile Pentium 4;
- тактовая частота - 1,4…2,4 ГГц;
- монитор - жидкокристаллический, типа LCD TFT с размером экрана по диагонали 15 дюймов.
СОИ ПАК представлены следующими средствами. Для отображения информации используются цветной жидкокристаллический видеомонитор (ВМЦ), в частности серийный видеомонитор ВМЦ - 45ЖК для оператора, и персональная портативная ЭВМ ЕС 1866 со встроенным монитором для командира МКНТП.
Основные технические характеристики видеомонитора цветного ВМЦ-45ЖК:
- интерфейс сопряжения с ЭВМ - VGA;
- размер экрана по диагонали - 450 мм;
- число элементов экрана - 1280×1024 пиксел;
- число градаций яркости - не менее 8;
- углы наблюдения изображения: по вертикали в пределах ±30°; по горизонтали в пределах ±45°.
Для приема и регистрации на бумажном носителе буквенно-цифровой и графической информации, принимаемой от БЭВМ, используется устройство документирования (УД), в частности УД-М211.
Основные технические характеристики устройства документирования УД-М211:
- принцип печати - ударное знакосинтезирование;
- печатающая головка - девятиигольчатая;
- скорость вывода информации - 120 знаков в секунду в режиме черновой печати;
- длина строки - 203,2 мм (8");
- максимальное количество знаков в строке - 160;
- интерфейсы - CENTRONICS, RS232C, специализированный интерфейс;
- бумажный носитель - рулон бумаги шириной 210 мм, бланк формата А4.
СВПХИ ПАК представлены следующими средствами.
Для ввода информации используется клавиатура (К), в частности клавиатура КЛ-85. Клавиатура КЛ-85 предназначена для ввода алфавитно-цифровой и управляющей информации.
Основные технические характеристики клавиатуры КЛ-85:
- 83 клавиши;
- подключение к ЭВМ через интерфейс RS-232C (RS-422).
Манипулятор графической информации (МГИ), а конкретно манипулятор графической информации серии МГ-1 предназначен для управления следящим перекрестием (курсором) на видеомониторах при работе с графической информацией и в "меню".
Манипулятор построен на базе плоской емкостной панели, чувствительной к прикосновению пальца.
Основные технические характеристики манипулятора графической информации МГ-1:
- 4 кнопки (для правой и левой руки оператора)
- подключение к ЭВМ через интерфейс RS-232C.
Накопитель (Н) типа CD-ROM 1B583 предназначен для чтения данных, хранящихся на лазерных компакт-дисках.
Накопитель (Н) полученной информации типа CD-ROM 1B583 выполнен как отдельное устройство, размещен в корпусе, оснащенном источником питания от бортовой сети, вентилятором и амортизаторами.
Основные технические характеристики накопителя типа CD-ROM 1B583
- емкость - 660Мбайт;
- интерфейс SCSI-2.
Устройство записи и переноса информации (УЗПИ) предназначено для снятия информации, полученной при использования выносной аппаратуры МКНТП. Прибор УЗПИ представляет собой одноплатную носимую микро-ЭВМ с встроенным накопителем. Прибор УЗПИ включает в себя следующие функциональные узлы:
- микропроцессор 1890 ВМ2Т;
- системный контроллер 1890 ВГ11Т;
- оперативное запоминающее устройство;
- системное репрограммируемое постоянное запоминающее устройство;
- контроллер интерфейса накопителя;
- накопитель типа flash-диск;
- контроллеры внешних интерфейсов.
Основные технические характеристики устройства записи и переноса информации (УЗПИ):
- информационная емкость - 2Гбайта;
- подключение к ЭВМ - по Ethernet или RS-232C.
Блок согласования (БС) используется для обеспечения подключения первичных навигационных датчиков топопривязчика (ДСМ и ДСД) к изделию.
БС обеспечивает управление работой датчиков, прием и первичную обработку (преобразование) информации, поступающей с них, передачу обработанных данных в БЭВМ по интерфейсу RS-232, а также выработку необходимых для работы датчиков напряжений питания.
В состав блока согласования входят следующие функциональные узлы: контроллер, управляющий работой блока, схема согласования с интерфейсом RS-232, буферированный регистр разовых команд ввода-вывода, обеспечивающий прием сигналов датчиков и управление режимами их работы, модуль питания.
Пульт ПДВ предназначен для дистанционного включения ЭВМ "Багет-РСЗБ".
Включение в состав комплекса топопривязки и навигации автономной аппаратуры топопривязки и навигации (ААТН) - бесплатформенной инерциальной навигационной системы (БИНС-ТП) позволяет:
- во-первых, определить в реальном масштабе времени параметры местоположения и угловой пространственной ориентации МКНТП на стоянке и в движении: координат и высоты, углов курса, крена и тангажа, линейных и угловых скоростей и ускорений (в движении) в заданной системе координат в любое время суток, на заданных географических широтах, в различных метеоусловиях;
- во-вторых, осуществить обмен информацией с БЭВМ с данными от внешних измерителей скорости, системы определения высоты (СОВ) и навигационной аппаратуры потребителя космической навигационной системы, также команд управления.
Основные технические и эксплуатационные характеристики БИНС-ТП:
- время начальной выставки в режиме «компасирование» - при температуре от 5°С и выше -11 мин, при низких температурах 16 мин;
- частота выдачи измеренных параметров - 1 Гц;
- диапазон измеряемых линейных скоростей (по 3-м осям) - ±30 м/с;
- диапазон измеряемых линейных ускорений (по 3-м осям) - ±5 g;
- диапазон измеряемых угловых скоростей (по 3-м осям) - ±40 град/с;
- определение параметров ориентации в режиме «компасирование» - азимута (дирекционного угла) - 2 угл. мин, углов крена и тангажа - 1 угл. мин;
- определение параметров навигации в автономном (инерциальном) режиме - по горизонтальным координатам - 50 м, по горизонтальной составляющей путевой скорости - 0,5 м/с;
- система нормально функционирует при следующих условиях: изменения географической широты - 90 град, изменения географической долготы - 180 град, изменения высоты в диапазоне - от -500 м до 3000 м относительно уровня моря, при путевой скорости - до 100 км/ч, изменения углов ориентации: азимута (дирекционного угла) - от 0° до 360°, тангажа - ±90°, крена - ±180°;
- изменение линейных ускорений по нормальной (Y), боковой (Z) и продольной (X) осям объекта, g - ±5,0;
- изменение линейных и угловых скоростей - не менее - 40°/с;
- время непрерывной работы в условиях эксплуатации - не мене 24 ч.
Принцип работы БИНС-ТП основан на измерении параметров углового и линейного перемещений объекта лазерными гироскопами и акселерометрами в физических полях Земли с последующей обработкой измеренных параметров в цифровом вычислителе БИНС-ТП по специальному алгоритму. В результате обработки данных формируются необходимые навигационные параметры: углы азимута, крена и тангажа, координаты местоположения, пройденный путь и скорость движения в заданной системе координат.
Для коррекции параметров навигации, выработанных БИНС-ТП, предусмотрено ее комплексирование с данными внешних измерителей, СОВ, спутниковых измерений.
Включение в состав комплекса топопривязки и навигации стационарной угломерной навигационной аппаратуры потребителей ГЛОНАСС/GPS (СУНАП), состоящей из блока приемоиндикатора (БПИ), антенной системы (АС), позволяет:
- во-первых, определить по радиосигналам космических навигационных систем ГЛОНАСС и GPS текущие координаты местоположения, составляющие вектора скорости, курса (азимута движения) потребителя в выбираемой оператором системе координат и в выбираемом оператором виде и выдачи результатов на устройство индикации БПИ;
- во-вторых, выдать полученную информацию по интерфейсу RS232C;
- в-третьих, определить дирекционный угол;
- в-четвертых, осуществить привязку шкалы времени потребителя к шкале времени UTC(SU) в режиме работы по космической навигационной системе ГЛОНАСС или по совмещенной группировке навигационных космических аппаратов ГЛОНАСС/GPS;
- в-пятых, обеспечить решение сервисных задач: прямой геодезической задачи, обратной геодезической задачи, решение треугольников, расчет сближения меридианов, перевычисление параметров при смене зоны, расчет поправки в дирекционный угол за переход из зоны в зону, преобразование координат (пересчет координат из плоских прямоугольных в геодезические эллипсоидальные и обратно), прямой засечки, обратной засечки.
В качестве СУНАП выбрана система «Грот-У» 14Ц823. Система «Грот-У» является полностью автоматическим прибором и может работать без вмешательства оператора сразу после установки и включения.
Основные технические характеристики «Грот-У» 14Ц823:
- 14Ц823 имеет 12 каналов приема, предназначенных для одновременной работы с орбитальными группировками ГЛОНАСС, GPS или ГЛОНАСС+GPS (совмещенная группировка), с использованием сигналов ПТ и ВТ (ГЛОНАСС), С/А-код (GPS) в диапазоне 1,6ГГц;
- среднее время первого определения координат, высоты, времени и дирекционного угла оси объекта не должно превышать 3 мин при работе по сигналам системы ГЛОНАСС и GPS с момента готовности к работе;
- предельные погрешности определений при работе по ГЛОНАСС на стоянке (в движении): координат местоположения - 30 (45)м, составляющих вектора скорости - 0,05 (0,07) м/с, дирекционного угла - не более 3 (10) у гл. мин.
Включение в состав комплекса топопривязки и навигации выносной угломерной навигационной аппаратуры потребителей ГЛОНАСС/Навстар (ВУНАП) - войскового навигационно-геодезического комплекса (ВНГК) позволяет:
- во-первых, провести относительные определения координат и высот неподвижных наземных точек в режиме постобработки (послесеансовой обработки) по радиосигналам космических навигационных систем;
- во-вторых, обеспечить накопление и обработку навигационной информации по принятой по сигналам космических навигационных систем ГЛОНАСС или GPS, или по сигналам этих двух систем одновременно;
- в-третьих, решать прикладные геодезические задачи.
В качестве выносной ВУНАП выбрана система «Грот-ТК» 14Ц824.
Состав «Грот-ТК»: носимый приемоиндикатор (НПИ) «Грот-Н» 14Ц820 космической навигационной системы, накопитель навигационной информации (ННИ), антенна геодезическая (АГ), комплект упаковочный.
Основные технические характеристики «ГРОТ-ТК» 14Ц824:
- среднеквадратическая погрешность определения координат и высот неподвижных наземных точек (на базах до 45 км) в режиме постобработки не превышает: по плановым координатам - 1 м, по высоте - 2 м;
- определение геодезических (B, L, H) и пространственных прямоугольных (X, Y, Z) координат в различных системах координат;
- средства ВНГК обеспечивают возможность установки и крепление АГ над точками наблюдения от 1 м до 1,5 м по высоте и центрирования с погрешностью не более 5 мм;
- время приведения полевого комплекта ВНГК в рабочее состояние с учетом выполнения операций по установке и центрирования АГ над определяемой точкой и выполнению необходимых подключений (подготовленным расчетом из 2-х человек) не превышает 10 мин.
Первичный прием и обработка навигационной информации обеспечивается АГ и НПИ космической навигационной системы ГЛОНАСС/GPS.
Основные технические характеристики НПИ «Грот-Н» 14Ц820:
- диапазон частот принимаемых каналов - 1,6 ГГц;
- тип используемых спутниковых сигналов - ГЛОНАСС (ПТ и ВТ-код) и GPS (С/А-код);
- число независимых (параллельных) каналов приема - 12;
- время первого определения (холодный старт) - не более 3 мин;
- частота обновления координат - 1 сек;
- используемые системы координат П3-90, СК-42, СК-95, WGS-84;
- погрешности определений при работе по ГЛОНАСС на стоянке (в движении): координат местоположения - 10 (15) м, составляющих вектора скорости - 0,05 м/с.
Основой АГ является антенный модуль АСНМ-4.
Основные технические характеристики антенного модуля АСНМ-4:
- полоса пропускания по уровню 1,5 Дб - 15711579 МГц и 1592 - 1614 МГц;
- максимальный коэффициент усиления на выходе - не менее плюс 30 дБ (в зените) и плюс 24 дБ (θ≤80°).
Накопление навигационной информации с НПИ на точках наблюдения и ее хранение обеспечивается ННИ.
Основные технические характеристики ННИ:
- максимальный объем записи информации в энергонезависимой памяти - 128 Мб;
- максимальное количество сессий наблюдения - 126 (126 сессий длительностью по 26 минут);
- время непрерывной работы от свежезаряженных аккумуляторов - от 8 до 20 часов;
- количество циклов записи-стирания памяти - не менее 100000 циклов;
- ННИ обеспечивает интерфейс с навигационной аппаратурой пользователя на скорости 9600 бит/с при накоплении данных и с ЭВМ пользователя на скорости 115200 бит/с при считывании накопленных сессий.
В качестве средства, обеспечивающего постобработку навигационной информации и решение специальных задач, используется ППЭВМ и БЭВМ ПАК.
Специальное программно-математическое обеспечение ВНГК обеспечивает:
- считывание с ННИ накопленной информации и формирование файлов данных опорной точки и файлов данных опорной и определяемых точек;
- ввод координат опорной точки, наименования (номеров) опорной и определяемых точек, постобработку навигационных данных;
- вычисление координат точек наблюдения в системах координат WGS-84 и П3-90;
- оценку точности координатных определений на каждой определяемой точке;
- выдачу и хранение на магнитном носителе файла отчета о сеансе работы в текстовом формате;
- архивирование измерительной навигационной информации;
- перевычисление координат определяемых точек из одной системы координат в другую;
- защиту специального программно-математического обеспечения от несанкционированного использования с помощью электронного ключа защиты;
- решение дополнительных геодезических задач на плоскости и эллипсоиде.
Включение в состав комплекса топопривязки и навигации датчиков приращения пути (ДПП): датчика скорости механического (ДСМ) и датчика скорости доплеровского (ДСД) позволяет получать информацию о приращении пути мобильного комплекса путем совместной обработки данных с ДСМ и ДСД.
В начале движения (а также при торможении) при скорости до 3 км/ч считывание приращений пути идет от ДСМ. При скорости движения выше 5 км/ч считывание приращений пути происходит от ДДС.
Включение в состав комплекса топопривязки и навигации контрольно-корректирующей станции (ККС) мобильной дифференциальной подсистемы ГЛОНАСС/GPS, состоящей из устройства приема и обработки информации (УПОИ), антенного модуля (AM), позволяет:
- во-первых, контролировать качество навигационных полей ГЛОНАСС и GPS, формировать корректирующую информацию и анализировать ее качество;
- во-вторых, выполнять функции опорной станции, станции интегрального контроля и контрольной станции, осуществляющей обмен информацией, управление составными частями информационно-аналитических комплексов и обеспечивающей внешнюю связь и выдачу корректирующей информации;
- в-третьих, осуществлять прием аппаратурой сигналов всех находящихся в зоне видимости навигационных космических аппаратов космических навигационных систем ГЛОНАСС и GPS;
- в-четвертых, осуществлять регистрацию корректирующей информации и ее выдачу по требованию оператора за заданный временной интервал;
- в-пятых, осуществлять автоматизированную выдачу на устройства отображения хранимой и поступающей информации;
- в-шестых, осуществлять архивацию и хранение измерительной и служебной информации.
В качестве ККС используется изделие 14Ц841.
Основные технические характеристики ККС 14Ц841:
- интервал обновления и выдачи в ПАК измерительной информации - не более 1,0 с;
- максимальная частота выдачи поправок к псевдодальностям и псевдоскоростям - не менее 1 Гц;
- среднеквадратические аппаратурные погрешности измерения псевдодальностей до навигационных космических аппаратов - не хуже 0,3 м;
- среднеквадратические аппаратурные погрешности измерения фазы несущей - не хуже 2 мм;
- среднеквадратические погрешности формирования поправок к псевдодальностям - не хуже 0,3 м;
- среднеквадратические погрешности формирования скоростей изменения поправок к псевдодальностям - не хуже 0,005 м/сек;
- среднеквадратические погрешности определения координат ККС в режиме накопления с постобработкой данных на временном интервале продолжительностью 8 часов при работе по космической навигационной системе ГЛОНАСС - не хуже 2 м, при работе по космической навигационной системе GPS - не хуже 5 м;
- среднеквадратическая погрешность привязки шкал времени - не хуже 50 нс;
- время от момента возникновения аномальных погрешностей навигационных определений по доступным навигационным космическим аппаратам до формирования и выдачи сообщения, характеризующего неисправность, - не более 1,0 с;
- время получения измерений и дифференциальных поправок с заданными точностями при наличии альманаха - не более 3 мин от момента включения ККС;
- выдача корректирующей информации осуществляется по интерфейсу RS 232 со скоростями от 0,05 до 9,6 кбит/с;
- изделие 14Ц841 обеспечивает работоспособность при отключении космических навигационных систем ГЛОНАСС или GPS по сигналам оставшейся космической навигационной системы, при достаточном количестве навигационных космических аппаратов в зоне радиовидимости;
- диаграмма направленности AM обеспечивает прием сигналов от космических навигационных систем ГЛОНАСС и GPS, начиная от угла места 6°.
Главной составной частью 14Ц841, реализующей функциональные возможности, является устройство приема и обработки информации (УПОИ), которое представляет собой мобильный усиленный компьютер (типа "Ноутбук").
Включение в состав МКНТП системы определения высоты (СОВ), состоящей из измерителя цифрового атмосферного давления (ИЦАД), датчика температуры воздуха (ДТВ), блока обработки данных (БОД), позволяет
- во первых, осуществлять автоматическое измерение приращений высоты объекта в точках маршрута при кратковременных остановках с опорой на начальном пункте маршрута;
- во-вторых, при помощи ИЦАД и ДТВ обеспечить непрерывное измерение величины атмосферного давления и температуры воздуха в зоне объекта;
- в-третьих, при помощи БОД обеспечить преобразование сигналов с выхода датчиков в цифровой код, обработку информации, передачу результатов обработки в вычислитель.
Включение в состав комплекса топопривязки и навигации системы связи и передачи данных (ССПД), состоящей из транспортного громкоговорящего устройства (ТГУ), аппаратуры передачи данных (АПД), каналообразующего оборудования (КОО), двух носимых радиостанций (НРС), позволяет обеспечить должностных лиц МКНТП устойчивой и надежной связью как внутриобъектовой, так и с сопрягаемыми объектами (пунктами управления вышестоящих и взаимодействующих формирований).
Для реализации информационных связей в МКНТП необходимо наличие следующих видов связи:
- телефонная связь по радиоканалу;
- телекодовая связь по радиоканалу;
Кроме того, для обеспечения взаимодействия членов экипажа машин между собой необходима организация внутренней связи.
ТГУ предназначено для передачи речевой информации от водителя и командира в кузов-фургон комплекса операторам и от операторов в кабину.
Основные технические характеристики ТГУ:
- выходная мощность усилителя при номинальном сопротивлении нагрузки 4 Ом, при номинальном напряжении питания 28В и номинальном входном напряжении на частоте 1000 Гц - не менее 6 Вт;
- номинальное входное напряжение усилителя на частоте 1000 Гц - 8 мВ;
- коэффициент гармонических искажений усилителя при номинальной выходной мощности 6 Вт в диапазоне частот от 300 до 1000 Гц - не более 3%;
- отношение сигнал/помеха усилителя при питании от источника, имеющего пульсации уровнем до 2,4В в диапазоне частот от 100 до 1200 Гц - не менее 50 дБ;
- время готовности ТГУ и работа после нажатия на усилителе кнопки включения питания не более 5 с.
Состав ТГУ: микрофон (М) М-ТГУ, усилитель звуковых частот (УЗЧ), комплект головок громкоговорителей динамических (ГГД).
Аппаратура передачи данных (АПД) предназначена для передачи, приема и распределения всей телекодовой информации в процессе боевой работы, которую обрабатывает оператор подразделения на своем автоматизированном рабочем месте, а также для технического сопряжения автоматизированного рабочего места с КОО.
В качестве АПД в МКНТП применяется аппаратура Т-236-В. Малогабаритная многоканальная абонентская аппаратура Т-236-В предназначена для гарантированного засекречивания, имитозащиты, распределения, передачи и приема данных в автоматизированных системах и комплексах. Аппаратура обеспечивает информационный обмен по каналам связи в дуплексном и симплексном режимах.
Аппаратура Т-236-В обеспечивает:
- автоматическую помехозащищенную передачу и прием по каналам связи смешанной сети передачи данных информационных пакетов, передачу управляющей информации в специальном формате и режиме;
- работу по обходным маршрутам, автоматическую защиту от размножения и зацикливания сообщений;
- передачу сообщений четырех категорий срочности при использовании дисциплины обслуживания с относительным приоритетом;
- автоматизированную передачу одноадресных сообщений, многоадресных сообщений группе абонентов (до 10 абонентов в группе), циркулярных сообщений группам абонентов.
Основные технические характеристики аппаратуры Т-236-В:
- канальные интерфейсы: С1-И (от 1,2 до 64 кбит/с), С1-ТЧ (1,2 кбит/с), С1-ИPC (16 и 32 кбит/с);
- имеет возможность наращивания канальной емкости;
- работа с ЭВМ по интерфейсу RS-232C или "Манчестер-2". В качестве КОО ССПД служит KB-радиостанция, которая предназначена для обеспечения радиосвязи с корреспондентами МКНТП, со старшими командирами (начальниками), приданными и подчиненными подразделениями, техническими средствами разведки.
В ССПД МКНТП используется радиостанция Р-168-100КБ - автоматизированная, приемо-передающая, симлексная, телефонно-телеграфная, предназначенная для ведения адаптивной адресной связи и связи на фиксированных частотах в коротковолновом диапазоне частот. КВ-сети дублируют те из сетей УКВ диапазона, важность которых в данной боевой ситуации наибольшая. Кроме того, КВ-сети - единственное средство радиосвязи при ведении боевых действий в горной, горно-пустынной и горно-лесистой местности.
Управление радиостанции - автоматическое на основе двух встроенных микроэлектронных вычислительных машин - базовой, обеспечивающей управление всеми видами и режимами работ, и периферийной, предназначенной для настройки автоматизированного согласующего устройства на все типы антенн.
Основные технические характеристики Р-168-100КБ:
- PC возимая, обеспечивает радиосвязь абонентов в КВ-диапазоне на стоянке и в движении на дальностях до 300 км (на мачтовую антенну);
- режимы работы - симплексный, программная перестройка частоты, автоматизированная адаптивная связь, сканирующий прием по 8 заранее подготовленным частотам (ЗПЧ), ручная и автоматизированная запись радиоданных, передача и прием циркулярного, адресного и тонального вызова, дежурный прием, дистанционное управление, управление работой от внешней ЭВМ по стыку RS-232C, автоматизированный контроль работоспособности;
- диапазон частот - 1,5…29,999 МГц;
- шаг сетки частот -0,1 кГц;
- нестабильность частоты - не более ±(3×10-7);
- чувствительность в телефонных режимах - не более 2,0 мкВ;
- чувствительность в телеграфных режимах - не более 1,5 мкВ;
- выходная мощность (мин/макс.) - 10/50 Вт;
- дальность связи на антенну АШ-4 (в движении) - не менее 20 - 50 км;
- токи, потребляемые радиостанцией: в режиме приема - не более 5,5А, в режиме передачи - не более 15А;
- интервал рабочих температур -50…+60°С.
Основные виды работы:
- передача и прием открытой и закрытой устройством технического маскирования речевой информации;
- передача и прием автоматической телеграфной информации;
- передача и прием телеграфной информации для слухового приема;
- передача и прием телеграфной информации в канале амплитудной телеграфии;
- передача и прием цифровой информации.
Кроме того, мобильный комплекс оснащен двумя носимыми радиостанциями (НРС) метрового диапазона Р-168-5УН-2, предназначенными для обеспечения открытой или технически защищенной конфиденциальной радиосвязью в полевых условиях.
PC Р-168-5УН-2 обеспечивает следующие виды и режимы работ:
- симплексную радиосвязь на любой из 8 заранее подготовленных частот из диапазона от 30 до 107,975 МГц с шагом сетки частот 25 кГц или кратным ему с количеством частот до 256 и скоростью перестройки до 100 скачков в секунду;
- прием и передачу аналоговой информации в открытом режиме с полосой пропускания низких частот от 300 до 3400 Гц;
- прием и передачу закрытой с помощью технического маскирования конфиденциальной информации со скоростями передачи 2,4 и 16 кбит/с;
- прием и передачу цифровой информации от оконечной аппаратуры со скоростями передачи 1,2; 2,4; 4,8; 9,6 и 16 кбит/с;
- поочередный, каждые 0,5 с, просмотр заранее подготовленных частот в режиме сканирующего приема с фиксацией сигнала вызова от корреспондента, а также выход в режим передачи на частоте вызывающего корреспондента;
- круглосуточную работу (во всех режимах) при отношении прием/передача, равном 5:1, и работе на передачу не более 15 мин непрерывно;
- ретрансляцию при использовании двух НРС на промежуточном участке радиолинии.
Основные технические характеристики радиостанции Р-168-5УН-2:
- диапазон рабочих частот - от 30 до 107,975 МГц с шагом дискретной настройки 25кГц;
- мощность передатчика при эквиваленте нагрузки 50 Ом -8 Вт в режиме «полной» мощности, 2 Вт в режиме «средней» мощности, 0,25 Вт в режиме «низкой» мощности;
- относительное отклонение рабочей частоты - не более ±1×10-6;
- дальность связи в зависимости от типа антенны - (10…20) км.
Включение в состав оборудования для дистанционной привязки (ОДП) теодолита (Т) позволяет проводить измерение углов, используя визирные цели и предметы местности.
Основные технические характеристики теодолита ЗТ5КП:
- СКП измерения одним приемом горизонтального угла - 2";
- увеличение зрительной трубы - 30х;
- наименьшее расстояние визирования - 1,5 м;
- наименьшее расстояние визирования с насадкой на объектив - 0,9 м;
- диапазон работы самоустанавливающегося индекса вертикального круга - 4 мин;
- диаметр лимбов - 90 мм;
- цена деления шкалы отсчетного устройства - 1";
- точность отсчета - 0,5…0,1";
- встроенный оптический центрир позволяет увеличение - 2,5х;
- масса теодолита составляет 3,7 кг.
Включение в состав оборудования для дистанционной привязки (ОДП) лазерного дальномера (ЛД) позволяет проводить измерение дальности до наблюдаемых целей.
Основные технические характеристики бинокля - дальномера 1Д18-1:
- угол поля зрения - 6°;
- увеличение визира - 8х;
- максимальная измеряемая дальность- не менее 5 км;
- минимальная измеряемая дальность - не более 50 м;
- погрешность измерения - не более 10 м;
- разрешающая способность по дальности не более 60 м;
- время отображения информации об измеренной дальности - 2…8 с;
- цена малого деления угломерной сетки визира - 0-05.
Включение в состав оборудования для дистанционной привязки (ОДП) гирокомпаса (ГК) позволяет производить автоматическое определение азимута (дирекционного угла) ориентирного направления на местности в диапазоне географических широт от минус 70° до плюс 70° во всех климатических районах земного шара.
Основные технические характеристики гирокомпаса 1Г57-1:
- среднеквадратичная погрешность определения азимута: 2' за время определения не более 2 мин, 1' за время определения не более 8 мин;
- время развертывания изделия из исходного положения в рабочее с выносом из топопривязчика - не более 2 мин;
- погрешность определения ориентирных направлений не более - 20".
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
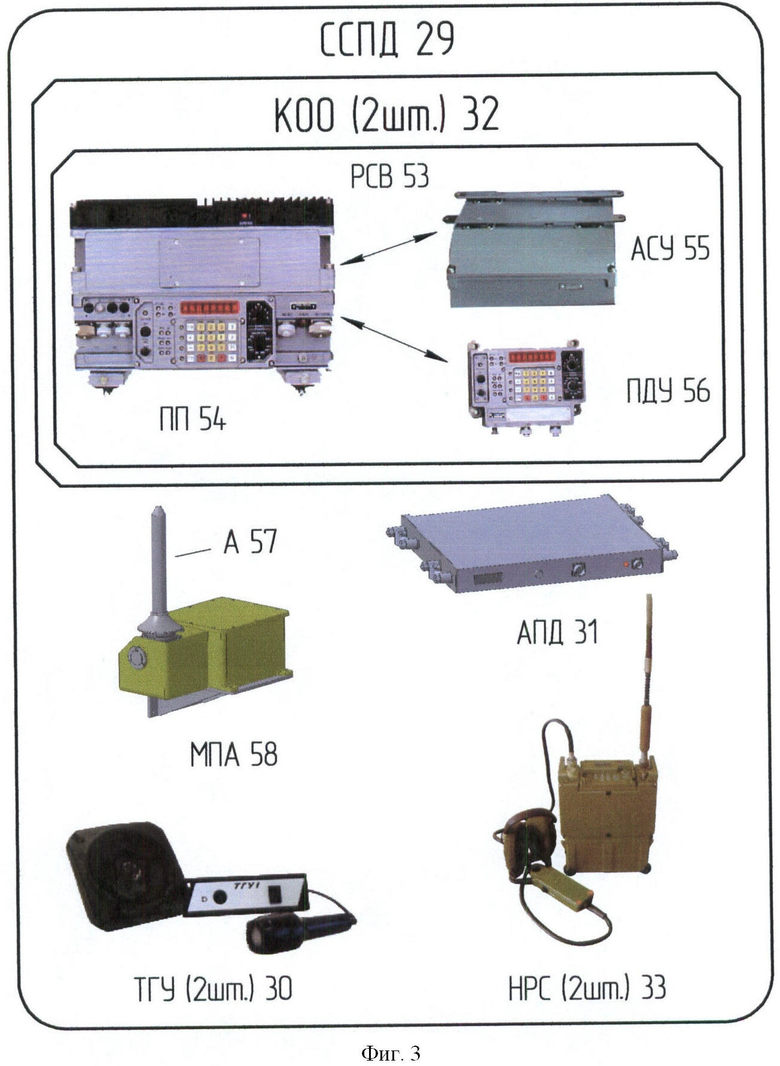
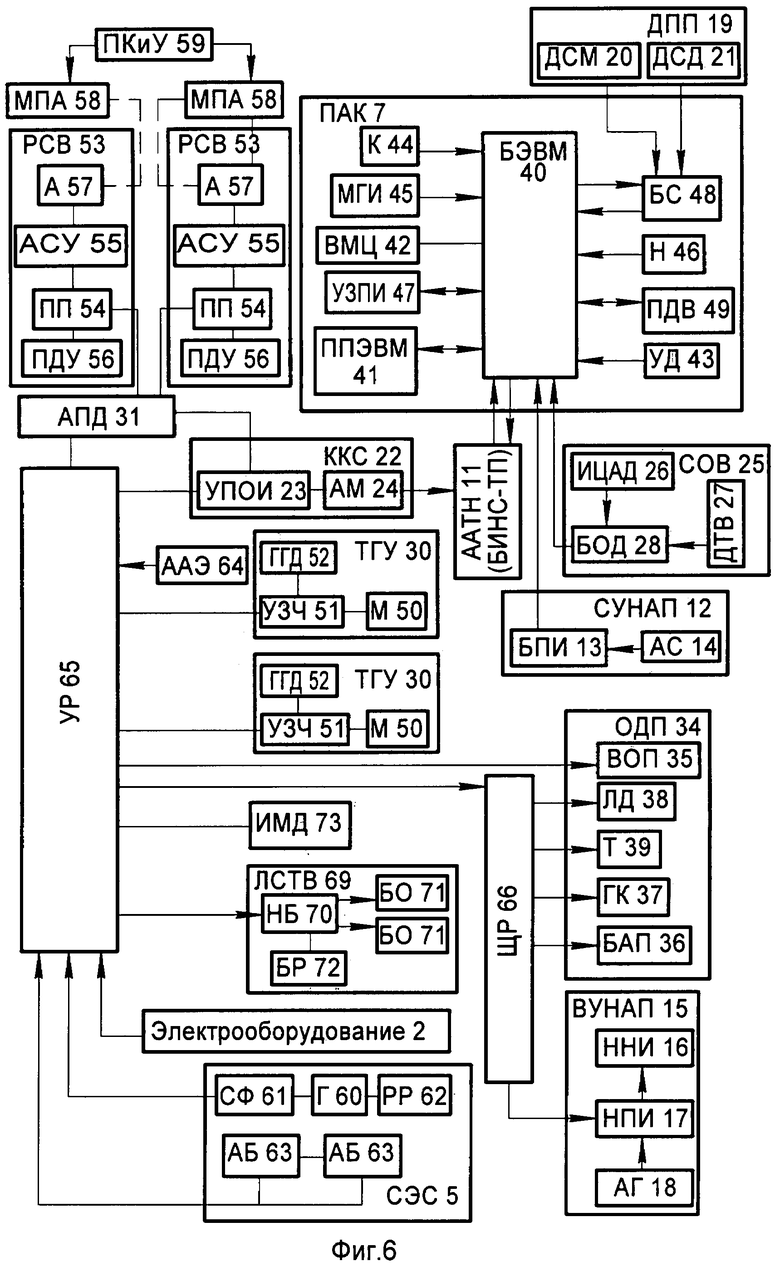
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид МКНТП; на фиг.2 - аппаратный состав ПАК; на фиг.3 - аппаратный состав ССПД; на фиг.4 - аппаратный состав КТН; на фиг.5 - состав ОДП; на фиг.6 - структурная схема МКНТП.
Мобильный комплекс навигации и топогеодезической привязки (МКНТП) размещен на базе транспортного средства повышенной проходимости 1, на котором установлены штатные средства электрооборудования 2 и оснащенного кузовом-фургоном 3. На транспортном средстве 1 размещены следующие технические средства: комплекс топопривязки и навигации 4 (КТПН), система электроснабжения 5 (СЭС), система жизнеобеспечения 6 (СЖО).
Комплекс топопривязки и навигации 4 состоит из следующих технических средств: программно-аппаратного комплекса 7 (ПАК), содержащего вычислительные средства 8 (ВС), средства отображения информации 9 (СОИ), средства ввода, передачи и хранения информации 10 (СВПХИ), автономной аппаратуры топопривязки и навигации 11 (ААТН) - бесплатформенной инерциальной навигационной системы (БИНС-ТП), стационарной угломерной навигационной аппаратуры потребителей ГЛОНАСС/GPS 12 (СУНАП), состоящей из блока приемоиндикатора 13 (БПИ), антенной системы 14 (АС), выносной угломерной навигационной аппаратуры потребителей ГЛОНАСС/GPS 15 (ВУНАП) - войскового навигационно-геодезического комплекса (ВНГК), состоящего из носимого приемоиндикатора 16 (НПИ) космической навигационной системы, накопителя навигационной информации 17 (ННИ) и антенны геодезической 18 (АГ), датчиков приращения пути 19 (ДПП): датчика скорости механического 20 (ДСМ) и датчика скорости доплеровского 21 (ДСД), контрольно-корректирующей станции 22 (ККС) мобильной дифференциальной подсистемы ГЛОНАСС/GPS, состоящей из устройства приема и обработки информации 23 (УПОИ), антенного модуля 24 (AM), системы определения высоты 25 (СОВ), состоящего из измерителя цифрового атмосферного давления 26 (ИЦАД), датчика температуры воздуха 27 (ДТВ) и блока обработки данных 28 (БОД), системы связи и передачи данных 29 (ССПД), состоящей из транспортного громкоговорящего устройства 30 (ТГУ), аппаратуры передачи данных 31 (АПД), каналообразующего оборудования 32 (КОО) и двух носимых радиостанций 33 (НРС), оборудования для дистанционной привязки 34 (ОДП), которое включает в себя визир ориентирования панаромический 35 (ВОП), буссоль артиллерийскую панаромическую 36 (БАП), гирокомпас 37 (ГК), лазерный дальномер 38 (ЛД), теодолит 39 (Т).
ВС 8 ПАК 7 включают в себя бортовую ЭВМ 40 (БЭВМ) и персональную портативную ЭВМ 41 (ППЭВМ). СОИ 9 ПАК 7 включают в себя цветной жидкокристаллический видеомонитор 42 (ВМЦ) БЭВМ 40 и встроенный монитор ППЭВМ 41, устройство документирования 43 (УД). СВПХИ 10 ПАК 7 включают в себя клавиатуру 44, манипулятор графической информации 45 (МГИ), накопитель 46 (Н) полученной информации, устройство записи и переноса информации 47 (УЗПИ). Кроме того, в состав ПАК входят блок согласования 48 (БС) и пульт дистанционного включения 49 (ПДВ).
В состав ТГУ 30 ССПД 29 входят микрофон 50 (М), усилитель звуковых частот 51 (УЗЧ), комплект головок громкоговорителей динамических 52 (ГГД). КОО 32 ССПД 29 выполнено на базе двух возимых радиостанций 53 (РСВ), в комплект которых входят приемопередатчик 54 (ПП), автоматизированное согласующее устройство 55 (АСУ), пульт дистанционного управления 56 (ПДУ), антенна 57 (А). Антенна (А) установлена на механизме подъема антенны 58 (МПА), который управляется при помощи пульта контроля и управления 59 (ПКиУ).
СЭС 5 МКНТП состоит из генератора 60 (Г), сетевого фильтра 61 (СФ), реле-регулятора 62 (РР), двух аккумуляторных батарей 63 (АБ) и дополнительно укомплектована аппаратурой автономного электропитания 64 (ААЭ). Распределение питающих цепей составных частей оборудования МКНТП осуществляется при помощи устройства распределительного 65 (УР), а подключение выносной аппаратуры - при помощи щитка распределительного 66 (ЩР)
Система жизнеобеспечения 6 (СЖО) состоит из отопительно-вентиляционной установки 67 (ОВУ), фильтровентиляционной установки 68 (ФВУ), локальной системы терморегулирования воздуха зоны рабочих мест экипажа 69 (ЛСТВ), состоящей из наружного блока 70 (НБ), блока охлаждения 71 (БО), бачка расширительного 72 (БР). Кроме того, МКНТП укомплектован измерителем мощности дозы 73 (ИМД) радиоактивного излучения.
В соответствии с предлагаемым изобретением мобильный комплекс навигации и топогеодезической привязки обеспечивает:
- определение и индикацию на стоянке плоских прямоугольных координат (X, Y) и высоты (Н) привязываемых точек в системе координат 1942 г. в Балтийской системе высот;
- непрерывное определение в движении, запись для контроля и индикацию на планшете (дисплее) плоских прямоугольных координат (X, Y) и высоты (Н) местоположения базового шасси и направления его движения;
- работу в режиме контрольно-корректирующей станции (ККС) космической навигационной системы ГЛОНАСС для формирования и передачи дифференциальных поправок потребителям;
- определение и индикация дирекционных углов продольной оси базового шасси на стоянке;
- непрерывное определение дирекционного угла базового шасси и пройденного расстояния в движении;
- определение на стоянке и в движении углов тангажа и крена базового шасси, передача их величин по стандартным интерфейсам;
- индикацию местоположения на цифровой карте местности масштабов 1:50000, 1:100000, 1:200000 с возможностью изменения масштаба индикации оператором и автоматическим переходом при выходе за границы карт любого масштаба;
- определение координат и высоты точки на цифровой карте местности, выбранной оператором;
- автоматическое определение координат точек (объектов), находящихся в прямой видимости от МКНТП с фиксацией их местоположения на цифровой карте местности и хранение в базе данных;
- решение сервисных задач в объеме, регламентированном руководящими документами (наставлениями или руководствами) по топогеодезическому обеспечению ракетных войск и артиллерии;
- автоматическую прокладку маршрута по заданным точкам с учетом рельефа местности, погодных условий, времени года и суток с отображением на автоматизированном рабочем месте маршрута движения, а также голосовое подтверждение рекомендуемой скорости движения и изменения направления движения.
Экипаж МКНТП состоит из четырех человек: командира, механика-водителя, старшего оператора, оператора. Командир при получении задачи ориентирует личный состав в обстановке, ставит ему задачу, организует и руководит работой экипажа, используя для этого ТГУ 30, производит выверку КТН 4 и других приборов, в ходе выполнения поставленной задачи выбирает место для установки мобильного комплекса, выбирает маршрут движения, начальную и конечную точки, если они не были указаны старшим начальником, определяет и записывает координаты начальной и конечной точек, готовит комплекс к работе; подает команды водителю на движение и остановку, на каждой привязываемой точке определяет ее координаты и высоту, а при необходимости и дирекционный угол ориентирного направления; на конечной точке определяет расхождение между координатами, снятыми с индикаторов ПАК 7 и с карты, и сравнивает их с допустимыми; при необходимости преобразует координаты привязанных точек в смежную зону, по окончании работ составляет список координат привязанных точек и докладывает о выполнении поставленной задачи командиру обслуживаемого подразделения. Механик-водитель запускает двигатель и следит за режимом работы транспортного средства 1 и аппаратуры; ведет автомобиль по маршруту с максимально возможной в данных условиях скоростью, не допуская при этом резкого торможения и крутых поворотов. Механик-водитель следит за состоянием работы генератора 60.
Старший оператор является заместителем командира и по его указанию работает на оборудовании КТН 4. При работе на МКНТП определяет по карте координаты начальной и конечной точек маршрута движения, включает и выключает аппаратуру, готовит к работе ПАК 7 и определяет дирекционный угол оси машины, подает команду водителю на движение и остановку транспортного средства 1, считывает показания с индикаторов ПАК 7 и ведет бортовой журнал, докладывает необходимые данные командиру. При работе на ГК 37 совместно с оператором устанавливает ГК 37 над указанной точкой и подготавливает его к работе, наблюдает точки реверсии и снимает отсчеты, проверяет правильность записей и вычислений в журнале и докладывает дирекционный угол (азимут) ориентирного направления командиру. После окончания работы совместно с оператором переводит ГК 37 в походное положение.
Оператор кроме работы на радиостанциях 33, 53, контрольно-корректирующей станции 22 (ККС) помогает старшему оператору в подготовке ГК 37 к работе и укладке его, записывает отсчеты в журнал наблюдений и производит вычисления; закрепляет на местности точки стояния ГК 37 и ориентирные точки.
В соответствии с поставленными задачами технология работ МКНТП подразделяется на: работу на исходном пункте, работу в процессе движения, работу на конечном пункте, техническое обслуживание МКНТП.
Работа МКНТП на исходном пункте.
На исходной точке выполняется: включение аппаратуры мобильного комплекса, ввод с клавиатуры 44 ПАК 7 прямоугольных координат места и высоты МКНТП в Балтийской системе высот. Координаты места и высота комплекса должны быть предварительно определены либо по данным БИНС-ТП 11, либо с помощью ориентиров на местности, координаты которых известны. БИНС-ТП 11 для обеспечения необходимой точности должна работать в дифференциальном режиме. Для определения координат места в исходной точке по местным ориентирам может использоваться БИНС-ТП 11 и ЛД 38. По истечении 10 минут с момента включения БИНС-ТП 11 изделие готово к выдаче дирекционного угла продольной оси специального транспортного средства 1 и использованию ЛД 38 для топопривязки находящихся в прямой видимости ориентиров на местности, а по истечении 20 минут к выработке координат места и высоты при движении.
Работа МКНТП в процессе движения
При движении МКНТП по маршруту, в зависимости от поставленной задачи выполняется: нанесение маршрута движения на электронную карту, выдача текущих координат места и пройденный путь, коррекция БИНС-ТП 11 по координатам места и скорости. Для коррекции используются либо БИНС-ТП 11, работающая в дифференциальном режиме, либо ориентиры с известными координатами. Коррекция по местным ориентирам производится при кратковременных (до одной минуты) остановках. При работе БИНС 11 в дифференциальном режиме коррекция с использованием ориентиров на местности может не производиться и, соответственно, допускается движение МКНТП без промежуточных остановок. Во время движения МКНТП непрерывно используются данные ДСМ 20 по приращению пути и эпизодически, в зависимости от требований скрытности и состояния отражающей поверхности дороги, замеры скорости ДСД 21.
Работа МКНТП на конечном пункте
На конечном пункте после полной остановки в зависимости от поставленной задачи выполняются следующие операции: уточняются координаты места базирования. Уточнение производится, если имеется возможность использования БИНС-ТП 11 в дифференциальном режиме, либо при наличии местных ориентиров с известными координатами. Далее производится топогеодезическая привязка ориентиров на местности и огневых позиций орудий или ракетных установок. Для привязки используется ЛД 38. В ВС 8 ПАК 7 решается задача по определению дирекционных углов направлений между точками огневых позиций и привязанными ориентирами на местности. Полученные значения углов и координаты огневых позиций по КОО 32 ССПД 29 передаются потребителям. Взаимным пеленгованием с использованием ЛД 38 и панорам орудий (ракетных установок) определяются углы основных дирекционных направлений для огневых позиций. При работе МКНТП на конечном пункте допускается его перемещение между сеансами топопривязки при необходимости изменения обзора местности.
МКНТП способен в условиях любого типа дорог выдвинуться в район развертывания. Во время движения и стоянки оператор проводит визуальную разведку местности, не покидая специального транспортного средства 1, при помощи ВОП 35. При необходимости возможно проведение визуальной разведки и топогеодезических измерений вне внутреннего пространства транспортного средства 1 при помощи ЛД 38. В зависимости от времени года и климатических условий местности используется ОВУ 67. В условиях заражения местности радиоактивными, отравляющими веществами, бактериальными средствами используется ФВУ 68. В условиях повышенной температуры окружающего воздуха используется ЛСТВ 69, обеспечивающая поступление через БО 71 охлажденных потоков воздуха на автоматизированные рабочие места операторов.
Электропитание аппаратуры осуществляется от генератора 60 и аккумуляторных батарей 63. Распределение и выдача напряжений осуществляется при помощи УР 65.
Для определения навигационной информации используется комплексирование информации с построенных на различных физических принципах датчиков: ДСМ; ДСД; ААТН; СОВ и спутниковых навигационных систем.
Аналитической и информационной основой МКНТП является ПАК 7, который координирует работу других систем комплекса. Качество навигационных полей спутниковых навигационных систем контролируется ККС 22, которая формирует корректирующую информацию и анализирует ее качество.
В соответствии с предлагаемым изобретением предполагается получить следующие технические характеристики.
Технические характеристи комплекса навигации и топопривязки
Средняя квадратическая погрешность (σx, σy) определения приращений плановых координат - не более 2 м/ мин в автономном режиме работы продолжительностью до 20 мин. без использования информации о скорости от внешних источников;
Средняя квадратическая погрешность (σx, σy) определения приращений плановых координат - не более 0,1% от пройденного пути при безостановочном движении до 2 ч с использованием информации о скорости от внешних источников;
Средняя квадратическая погрешность (σx, σy) определения приращений плановых координат в режиме с периодическими остановками через 30 мин движения на время до 1-2 мин - не более 5 м с использованием информации о скорости и высоте от внешних источников;
Средняя квадратическая погрешность (σx, σy) определения приращений плановых координат и (он) определения высоты с непрерывной коррекцией в движении по сигналам навигационной аппаратуры потребителей космической навигационной системы и барометрического высотомера - не более 1-3 м по координатам и 3-5 м по высоте;
Средняя квадратическая погрешность определения дирекционного угла продольной оси базового шасси (контрольного элемента) - не более 2 угл. мин при времени гирокомпасирования не более 5 мин;
Средняя квадратическая погрешность определения углов тангажа и крена в движении в перечисленных выше режимах работы - не более 4 угл. мин;
Средняя квадратическая погрешность определения углов тангажа и крена на стоянке через 1 мин после прекращения движения - не более 0,5угл. мин.
Время подготовки аппаратуры и оборудования к работе - 20 мин;
Время непрерывной работы - 24 ч;
Потребляемая мощность аппаратуры и оборудования - не более 4 кВт;
Напряжение питания постоянного тока от бортсети - 27-5 +2 В с коэффициентом пульсации, не более 5%.
* - приведенные параметры соответствуют варианту использования в качестве транспортного средства МКНТП автомобиля УРАЛ-43206-1730.
Кроме того, аппаратный состав может меняться с целью улучшения тактике - технических характеристик.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании мобильного комплекса навигации и топопривязки, обладающего высоким энергетическим, информационно-аналитическим потенциалом, возможностью мобильного перемещения по всем типам дорог за счет применения автошасси повышенной проходимости, навигационной аппаратуры, вспомогательных приборов и оборудования нового поколения, соответствующих требованиям, предъявляемым к современным образцам вооружений, повышения комфортности при эксплуатации, что позволит повысить боеготовность и боеспособность вооруженных сил в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2011 |
|
RU2469271C1 |
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |



Изобретение относится к мобильной технике навигации и топогеодезической привязки. Мобильный комплекс навигации и топопривязки (МКНТП) размещен на базе транспортного средства повышенной проходимости (1) с кузовом-фургоном (3) и средствами электрооборудования (2). На транспортном средстве (1) размещены комплекс топопривязки и навигации (КТПН), система электроснабжения (СЭС), система жизнеобеспечения (СЖО) (6). Комплекс топопривязки и навигации (4) состоит из программно-аппаратного комплекса (ПАК) с вычислительными средствами (ВС), средствами отображения информации (СОИ), средствами ввода, передачи и хранения информации (СВПХИ), автономной аппаратурой топопривязки и навигации (ААТН), стационарной угломерной навигационной аппаратурой потребителей ГЛОНАСС/Навстар (СУНАП), контрольно-корректирующей станцией (ККС) мобильной дифференциальной подсистемы ГЛОНАСС/GPS, системы связи и передачи данных (ССПД), оборудования для дистанционной привязки (ОДП). ВС ПАК включают в себя бортовую ЭВМ и персональную портативную ЭВМ. В состав ПАК входят блок согласования (БС) и пульт дистанционного включения (ПДВ). МКНТП укомплектован измерителем мощности дозы (ИМД) радиоактивного излучения. Изобретение повышает эффективность комплекса. 6 ил.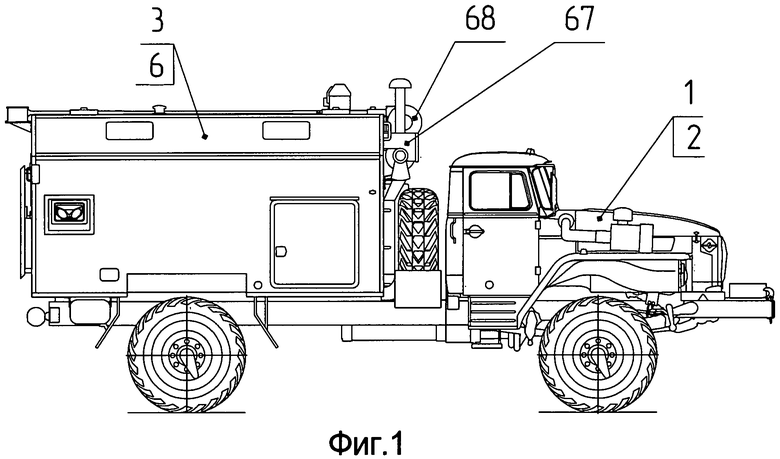
Мобильный комплекс навигации и топопривязки (МКНТП), содержащий транспортную базу, технические средства комплекса топопривязки и навигации в составе программно-аппаратного комплекса (ПАК), оснащенного вычислительными средствами (ВС) с набором дополнительных модулей и автоматизированными рабочими местами, программным обеспечением и средствами регистрации и документирования, навигационную аппаратуру потребителей спутниковых навигационных систем, навигационную аппаратуру, оснащенную датчиком скорости механическим (ДСМ), оборудование для дистанционной привязки, комплекс средств связи и аппаратуры передачи данных (АПД), систему электропитания и комплекс жизнеобеспечения;
отличающийся тем, что в качестве транспортной базы используется транспортное средство повышенной проходимости, оснащенное кузовом-фургоном, в комплексе топопривязки и навигации (КТН) в качестве навигационной аппаратуры используется бесплатформенная инерциальная навигационная система (БИНС-ТП), в состав КТН дополнительно введены:
выносная угломерная навигационная аппаратура потребителей ГЛОНАСС/Навстар (ВУНАП), датчик скорости доплеровский (ДСД), система определения высоты (СОВ), контрольно-корректирующая станция мобильной дифференциальной подсистемы ГЛОНАСС/GPS, связанная через АПД и средства связи - с внешними потребителями корректирующей информации, ДСМ, ДСД, СОВ, навигационная аппаратура потребителей спутниковых навигационных систем, БИНС-ТП связаны с ВС ПАК, в состав оборудования для дистанционной привязки (ОДП) дополнительно введены: теодолит (Т), лазерный дальномер (ЛД), гирокомпас (ГК), средства связи дополнительно укомплектованы двумя носимыми радиостанциями (НРС).
| Стенок для катания войлока | 1929 |
|
SU29600A1 |
| НАРОДНОЕ ПРЕДПРИЯТИЕ (ЧЕХОСЛОВАКИЯ)Действительный изобретатель Эдуард Горжанский | 0 |
|
SU91291A1 |
| Радиотелеграфная мачта | 1922 |
|
SU1530A1 |
| WO 2007109618 A3, 27.09.2007 | |||
| МОБИЛЬНАЯ СТАНЦИЯ МНОГОКАНАЛЬНОЙ СВЯЗИ | 2007 |
|
RU2352078C1 |
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| Устройство для измерения температур движущихся металлических предметов | 1949 |
|
SU90234A1 |
| АППАРАТ ДЛЯ ОБРАБОТКИ МЕЛКОЗЕРНИСТЫХ МАТЕРИАЛОВ ВО ВЗВЕШЕННОМ СОСТОЯНИИ ГАЗАМИ | 1939 |
|
SU59858A1 |

