Изобретение относится к области навигации наземных транспортных средств и может быть использовано в навигационных системах с использованием информации от датчиков различного типа для решения задач топогеодезической подготовки боевых действий ракетных войск и артиллерии Сухопутных войск.
Известен топопривязчик УА3-452Т (см. Топопривязчик УА3-452Т. Техническое описание и инструкция по эксплуатации БИ2 511 003 ТО, стр.10-15), принятый за прототип. Топопривязчик УА3-452Т представляет собой автомобиль УА3-452АЭ (транспортная база), в котором смонтирован комплект специальных приборов наземной навигационной аппаратуры со вспомогательным оборудованием.
Принцип (способ) работы топопривязчика (ТП) сводится к непрерывному автоматическому решению прямой геодезической задачи путем подачи в счетно-решающий прибор в каждый момент движения данных о проходимом автомобилем пути и дирекционном угле направления движения автомобиля.
Проходимый автомобилем путь снимается датчиком приращения пути, передающим в счетно-решающий прибор величину пути, проходимого передними колесами.
Дирекционный угол продольной оси автомобиля непрерывно и автоматически определяется гирокурсоуказателем, и результаты передаются в виде электрических сигналов в счетно-решающий прибор. Таким образом, при движении ТП в курсопрокладчик непрерывно поступает приращение пути ∆S и дирекционного угла ∆α в полярной системе координат.
В курсопрокладчике производится выработка текущих координат. При движении ТП с постоянным дирекционным углом α проекции пройденного машиной пути на оси ОХ и OY будут равны:
∆X1=∆S1×cosα1; ∆Y1=∆S1×sinα1
Если известны начальные координаты XO, YO, то текущие координаты машины XT, YT определяются как сумма:
XT=XO+∆X1; YT=YO+∆Y1
При движении машины в реальных условиях (с переменными дирекционными углами) приращения координат определяются по формулам:


Следовательно, текущие координаты движущейся машины определяются по формулам:


Во время нахождения ТП на начальной точке с известными координатами XO, YO и дирекционным углом αОР ориентирного направления монокуляр визира наводится на ориентир, определяется угол βВИЗ. На шкале курсопрокладчика устанавливается дирекционный угол продольной оси автомобиля, который вычисляется по формуле:
αОСИ=αОР-βВИЗ
В первый момент движения ТП от начальной к привязываемой точке путь ∆S1 поступит в курсопрокладчик, в котором этот путь будет умножен на синус и косинус дирекционного угла αОСИ1 продольной оси автомобиля и полученные произведения будут суммированы с координатами начальной точки XO и YO, в результате чего на шкалах курсопрокладчика могут быть считаны координаты X1, Y1 местоположения ТП в первый момент его движения.
В следующий момент движения ТП дирекционный угол продольной оси автомобиля изменится на угол ∆α1 по отношению к первоначальному углу αОСИ1 и будет равен αОСИ2=αОСИ1+∆α1. Это изменение угла будет обнаружено гирокурсоуказателем. От гирокурсоуказателя угол ∆α1 поступает в курсопрокладчик, в котором ранее установленный дирекционный угол αОСИ1 будет изменен на новый, равный дирекционному углу αОСИ2 продольной оси автомобиля во второй момент его движения.
Одновременно в курсопрокладчик поступает путь, пройденный ТП за время от первого до второго момента его движения. Этот путь будет умножен на синус и косинус дирекционного угла αОСИ2, и полученные произведения ∆Х2 и ∆Y2 будут суммированы с координатами X1 и Y1 местоположения ТП в первый момент его движения.
В результате на шкалах курсопрокладчика можно считать координаты X2 и Y2 местоположения ТП, дирекционный угол αОСИ2 продольной оси автомобиля во второй момент его движения. Так как на протяжении всего пути движения ТП в курсопрокладчик непрерывно поступают изменения дирекционного угла и пути, то со шкал курсопрокладчика в каждый момент движения могут быть считаны координаты местонахождения ТП и курс его движения (дирекционный угол продольной оси автомобиля).
Недостатками прототипа являются:
- необходимость наличия разветвленной топогеодезической сети для проведения качественной топогеодезической привязки;
- высокая погрешность при определении навигационных параметров, напрямую зависящая от пройденного топопривязчиком пути и погрешности начального ориентирования, которое к тому же занимает большое количество времени;
- высокий уровень влияния различных факторов на точность определяемых параметров (человеческий фактор, геометрическая точность карты, погодные условия, вид местности и т.п.).
Предлагаемым изобретением решается задача по повышению точности и эффективности системы навигации топопривязчика.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа работы топопривязчика, обеспечивающего высокую точность определения навигационных параметров на базе инерциальной автономной аппаратуры топопривязки и навигации с использованием корректирующей информации от внешних источников: навигационной аппаратуры потребителей спутниковых навигационных систем, системы определения высоты, высокую автоматизацию процесса определения, регистрации топогеодезических данных.
Указанный технический результат достигается тем, что в предлагаемом способе работы топопривязчика, включающем непрерывное определение в реальном масштабе времени навигационной аппаратурой топопривязчика, включающей в себя бортовой вычислитель, датчики приращения пути и курсовую систему, параметров его местоположения и угловой ориентации на стоянке и в движении, отображение на соответствующем устройстве вычислителя текущих значений координат и дирекционного угла продольной оси топопривязчика и его положения на карте местности, новым является то, что навигационная аппаратура топопривязчика дополнительно обеспечивает непрерывное определение в реальном масштабе времени высоты, углов крена и тангажа, отображение на видеомониторе бортового вычислителя вышеуказанных параметров, комплексирование информации с построенных на различных физических принципах датчиков: датчиков скорости механического и доплеровского, инерциальной автономной аппаратуры топопривязки и навигации, системы определения высоты и навигационной аппаратуры потребителей спутниковых навигационных систем, а также загрузку в бортовой вычислитель цифровых карт местности с внешнего накопителя, автоматическую смену листов цифровых карт местности любого масштаба при выходе координат за их границу, склейку смежных номенклатурных листов цифровой карты местности, определение на цифровой карте местности координат и высоты точек, отмеченных курсором оператора, решение специальных геодезических задач, переход в режим технического обслуживания.
Обеспечение навигационной аппаратурой топопривязчика непрерывного определения в реальном масштабе времени высоты, углов крена и тангажа позволяет:
- повысить точность определения навигационных параметров;
- повысить точность определения корректирующей информации, вводимой для снижения погрешностей навигационной системы.
Отображение на видеомониторе бортового вычислителя вышеуказанных параметров, определяемых топопривязчиком, позволяет:
- обеспечить наглядность происходящих процессов;
- обеспечить необходимую степень контроля.
Комплексирование информации с построенных на различных физических принципах датчиков: датчиков скорости механического и доплеровского, инерциальной автономной аппаратуры топопривязки и навигации, системы определения высоты и навигационной аппаратуры потребителей спутниковых навигационных систем позволяет:
- производить автоматическое определение (расчет) трех текущих координат местоположения, вектора путевой скорости, азимута движения подвижного объекта, дирекционного угла и текущего времени;
- повысить точностные характеристики навигационной информации.
Загрузка в бортовой вычислитель цифровых карт местности с внешнего накопителя позволяет оперативно обеспечить загрузку в вычислитель топопривязчика заранее подготовленного электронного картографического материала, подобранного в соответствии с районом выполнения работ.
Обеспечение автоматической смены листов цифровых карт местности любого масштаба при выходе координат за их границу позволяет обеспечить непрерывность отображения объкта при его движении на видиомониторе вычислителя.
"Склейка" смежных номенклатурных листов цифровой карты местности позволяет сформировать конкретный район, на котором производятся работы по определению топогеодезических параметров.
Автоматическое определение на цифровой карте местности координат и высоты точек, отмеченных курсором оператора, позволяет оперативно создать сеть местных ориентиров с известными координатами и ориентирными направлениями.
Обеспечение автоматизированного решения специальных геодезических задач позволяет обеспечить решение задач по топогеодезическому обеспечению.
Данный режим обеспечивает выполнение математических расчетов для решения следующих задач:
- преобразование полных прямоугольных координат из одной зоны в другую;
- прямая геодезическая задача;
- обратная геодезическая задача;
- расчет дирекционного угла светила для заданных моментов времени;
- расчет азимута по результатам наблюдения светила;
- прямая засечка ориентированным прибором;
- прямая засечка по измеренным углам;
- обратная засечка ориентированным прибором;
- обратная засечка по измеренным углам;
- обратная засечка по измеренным расстояниям;
- обратная засечка по измеренному углу и расстоянию;
- угловой ход.
Обеспечение перехода навигационной аппаратуры в режим технического обслуживания позволяет провести калибровку, контроль и изменение формулярных поправок и установку параметров работы системы.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг.1 показана функциональная схема топопривязчика; на фиг.2 - алгоритм работы топопривязчика; на фиг.3 - рабочее окно задачи "Индикация"; на фиг.4 - рабочее окно задачи "Просмотр карты"; на фиг.5 - рабочее окно задачи "Калибровка"; на фиг.6 - рабочее окно подзадачи "Выбор начальных координат"; на фиг.7 - рабочее окно подзадачи "Дирекционный угол"; на фиг.8 - рабочее окно подзадачи "Режим АСН"; на фиг.9 - рабочее окно подзадачи "Поправки".
Алгоритм реализации способа работы топопривязчика реализуется следующим образом.
1. Включение навигационной аппаратуры топопривязчика.
При включении бортового вычислителя 1 происходит автоматический запуск специального программно-математического обеспечения и режима определения дирекционного угла. После загрузки операционной системы на экран бортового вычислителя выводится рабочее окно.
2. Проверка соответствия значений формулярных поправок. В случае несоответствия формулярных поправок необходимо прекратить дальнейшую эксплуатацию топопривязчика до выявления причин и устранения несоответствия.
3. Проверка правильности выбора и ввода начальных параметров системы навигации.
Выполнение движения топопривязчика может осуществляться при наличии сообщения о готовности.
4. Выбор режима "Навигация".
Управление режимами работы системы осуществляется оператором. При выборе режима на видеомонитор бортового вычислителя 1 выводится список задач выбранного режима.
Режим "Навигация" предназначен для определения плоских прямоугольных координат X, Y, высоты Н в Балтийской системе, дирекционного угла топопривязчика на стоянке и в движении, а также углов тангажа и крена, скорости и пройденного пути.
5. Ввод начальных координат и дирекционного угла продольной оси топопривязчика.
В качестве источника информации о дирекционном угле продольной оси топопривязчика может быть инерциальная автономная аппаратура топопривязки и навигации 2 или определения, полученные с помощью автономных приборов.
В качестве источника информации о начальных координатах топопривязчика может быть навигационная аппаратура потребителей спутниковых навигационных систем 7 или определения, полученные с помощью автономных приборов.
Инерциальная автономная аппаратура топопривязки и навигации 2 является основой навигационной аппаратуры топопривязчика и определяет вектор путевой или абсолютной скорости объекта. Преобразование вектора скорости по соответствующим алгоритмам позволяет определить координаты и высоту положения топопривязчика в выбранной системе координат (геодезической, ортодромической, прямоугольной и т.д.) в реальном масштабе времени. Кроме ускорений, скоростей и координат инерциальная автономная аппаратура топопривязки и навигации 2 вычисляет углы крена, тангажа и истинного курса, а также их производные: угловые скорости и ускорения.
6. Работа топопривязчика в процессе движения.
При движении топопривязчика по маршруту, в зависимости от поставленной задачи выполняется:
- нанесение маршрута движения на цифровую карту местности. При необходимости оператор может нанести дополнительные ориентиры и особые условия состояния маршрута;
- коррекция инерциальной автономной аппаратуры топопривязки и навигации 2 по координатам места и скорости. Для коррекции используются либо навигационная аппаратура потребителей спутниковых навигационных систем 7, либо ориентиры с известными координатами.
Во время движения топопривязчика инерциальная автономная аппаратура топопривязки и навигации 2 использует данные датчиков приращения пути 3: механического датчика скорости 4 и доплеровского датчика скорости 5.
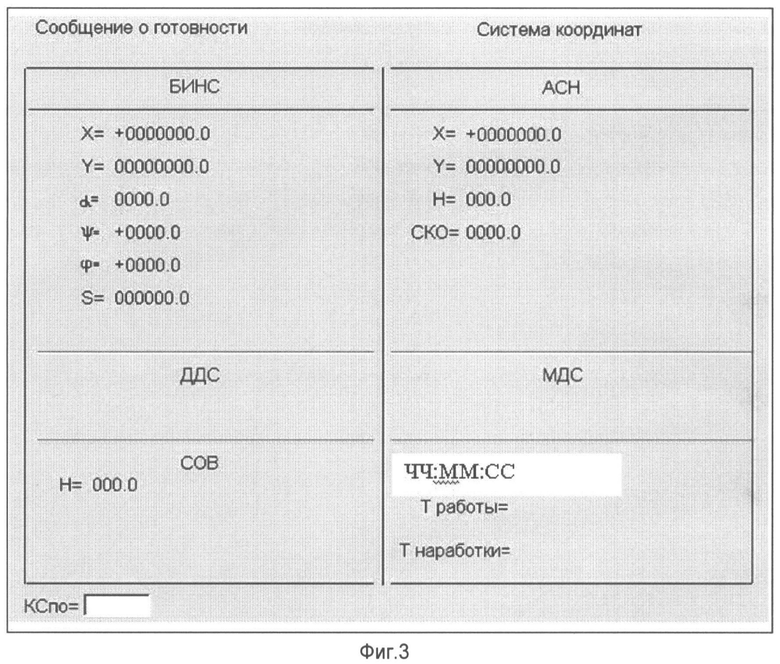
При выборе режима "Состояние" на видеомонитор бортового вычислителя 1 выводится информация о текущем состоянии системы и сборочных единиц, текущих значений входных и выходных данных:
- сообщение о готовности и выбранная система координат;
- текущие данные топопривязчика по данным инерциальной автономной аппаратуры топопривязки и навигации 2: координаты X, Y, дирекционный угол продольной оси топопривязчика α, поперечный ψ (крен) и продольный φ (тангаж) углы наклона, текущий пройденный путь S;
- текущие данные топопривязчика по данным навигационной аппаратуры потребителей спутниковых навигационных систем: координаты X, Y, высота Н, среднеквадратическая ошибка (СКО);
- в разделах доплеровского датчика скорости 5 и механического датчика скорости 4 отображаются их текущие состояния;
- в разделе системы определения высоты отображаются текущие данные высоты 6.
Высокая точность навигационных определений достигается за счет комплексирования инерциальной навигационной информации, информации о параметрах высоты топопривязчика со спутниковой навигационной информацией.
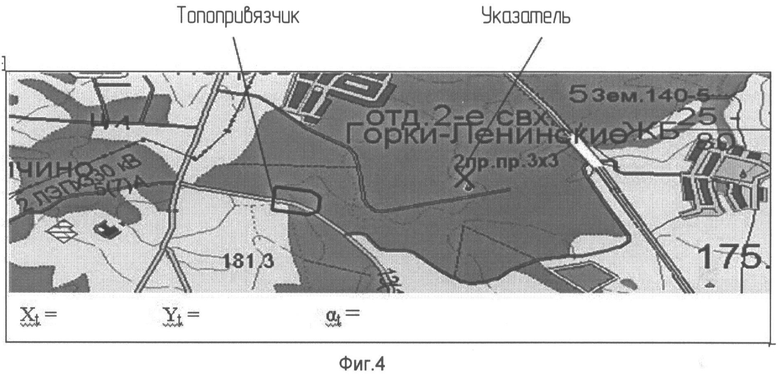
При переходе в режим "Работа с ЦКМ" осуществляется работа с цифровыми картами местности и выполняются следующие задачи: "Просмотр карты", "Формирование района работы", "Загрузка карт", "Удаление карт".
При просмотре карты определяется местоположение топопривязчика на цифровой карте местности. При подведении указателя в виде перекрестия к любому месту на карте или к топопривязчику в нижней строке окна выводятся координаты данного места или топопривязчика. При движении топопривязчика происходит автоматическая смена листов цифровых карт местности любого масштаба при выходе координат за их границу,
С помощью задачи "Формирование района работы" формируется предполагаемый район работы топопривязчика за счет "склейки" смежных номенклатурных листов цифровой карты местности.
При активизации задачи "Загрузка карт" происходит автоматическая запись цифровой карты местности в бортовой вычислитель 1.
7. Работа топопривязчика на конечном пункте
На конечном пункте после полной остановки топопривязчика в зависимости от поставленной задачи выполняются следующие операции:
- уточняются координаты места топопривязчика. Уточнение производится при помощи навигационной аппаратуры потребителей спутниковых навигационных систем либо с помощью автономных приборов при наличии местных ориентиров с известными координатами;
- производится топогеодезическая привязка ориентиров на местности и огневых позиций орудий или ракетных установок;
- в бортовом вычислителе 1 решается задача по определению дирекционных углов направлений между точками огневых позиций и привязанными ориентирами на местности.
8. Режим "Техническое обслуживание".
Режим "Техническое обслуживание" позволяет обеспечить проведение калибровки, контроль или изменение формулярных поправок и установки параметров работы системы. Режим "Тех. обслуживание" включает в себя следующие задачи: "Калибровка" и "Настройки".
Калибровка может быть проведена двумя способами:
а) калибровка путем совершения марша по маршруту с известными координатами начальной и конечной точки:
топопривязчик устанавливается на начальной точке маршрута, в бортовой вычислитель 1 вводятся значения ее координат. После завершения выставки инерциальной автономной аппаратуры топопривязки и навигации 2 начинается калибровка и начинается движение к конечной точке маршрута. Топопривязчик устанавливается на конечной точке, и при наличии сообщения "100%" вводятся значения ее координат. По результатам проведенной калибровки контролируются значения полученных коэффициентов и поправок, после чего они сохраняются в памяти бортового вычислителя 1;
б) калибровка путем совершения марша по маршруту с известными координатами начальной точки:
топопривязчик устанавливается на начальной точке маршрута, в бортовой вычислитель 1 вводятся значения ее координат. После завершения выставки инерциальной автономной аппаратуры топопривязки и навигации 2 начинается калибровка и начинается движение. При появлении сообщения "100%" топопривязчик останавливается. Через 10 секунд после полной остановки топопривязчика результаты калибровки принимаются, контролируются значения полученных коэффициентов и поправок, после чего они сохраняются в памяти бортового вычислителя 1.
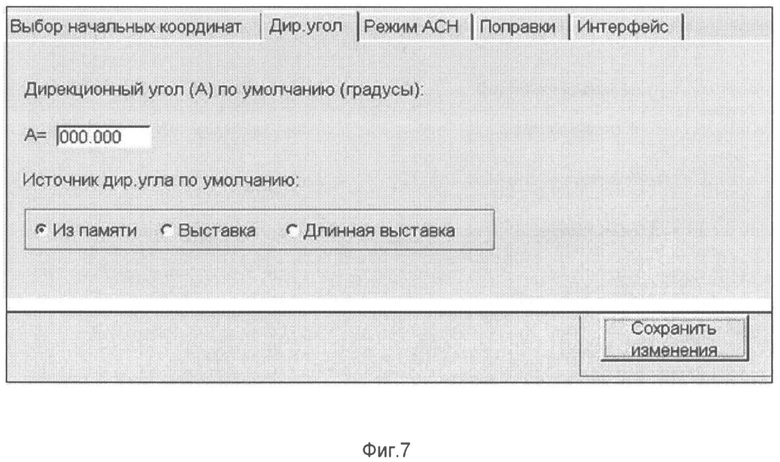
Задача "Настройки" предназначена для выбора и ввода начальных параметров системы и включает следующие подзадачи: "Выбор начальных координат", "Дирекционный угол", "Режим АСН". "Поправки", "Интерфейс".
Подзадача "Выбор начальных координат" предназначена для ввода или корректировки значений начальных (конечных) координат X, Y, высоты Н, которые будут использоваться при следующем включении системы и выбора системы координат (П3-90, СК-42, WGS-84).
Подзадача "Дирекционный угол" предназначена для ввода значения дирекционного угла, выбора источника и режима определения дирекционного угла. При выборе дирекционного угла "Из памяти" используется значение дирекционного угла из памяти бортового вычислителя 1, из режима "Выставка" используется значение дирекционного угла, определенное с помощью инерциальной автономной аппаратуры топопривязки и навигации 2, из режима "Длинная выставка" используется значение дирекционного угла, определенное с помощью инерциальной автономной аппаратуры топопривязки и навигации 2 с повышенной точностью при увеличенном времени определения. Данный режим определения дирекционного угла используется при проведении калибровки системы.
Подзадача "Режим АСН" предназначена для выбора режима работы навигационной аппаратурой потребителей спутниковых навигационных систем. При выборе режима "GLONASS+GPS" используется измерение навигационных параметров путем совместной обработки совокупности сигналов спутниковых систем GLON-ASS и GPS, при выборе режима "GLONASS" используется измерение навигационных параметров по сигналам спутниковой системы GLONASS, при выборе режима "GPS" используется измерение навигационных параметров по сигналам спутниковой системы GPS.
Подзадача "Поправки" предназначена для контроля и изменения значений коэффициентов механического датчика скорости 4, доплеровского датчика скорости 5 и угловых поправок (поправок в углы), характеризующих проекции динамических осей топопривязчика относительно инерциальной автономной аппаратуры топопривязки и навигации 2.
Подзадача "Интерфейс" предназначена для включения (отключения) отображения виртуальной клавиатуры на экране в режимах "Навигация" и "Сервисные задачи" и подсказки внизу экрана.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа работы топопривязчика, обеспечивающего высокую точность определения навигационных параметров на базе инерциальной автономной аппаратуры топопривязки и навигации с использованием корректирующей информации от внешних источников: навигационной аппаратуры потребителей спутниковых навигационных систем, системы определения высоты, высокую автоматизацию процесса определения, регистрации топогеодезических данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| Способ контроля точностных характеристик системы топопривязки и навигации | 2016 |
|
RU2659614C9 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |






Изобретение относится к области навигации наземных транспортных средств и может быть использовано в навигационных системах с использованием информации от датчиков различного типа для решения задач топогеодезической подготовки боевых действий ракетных войск и артиллерии сухопутных войск. Алгоритм реализации способа работы топопривязчика предусматривает: включение навигационной аппаратуры топопривязчика; проверку соответствия значений формулярных поправок, причем в случае несоответствия формулярных поправок прекращают дальнейшую эксплуатацию топопривязчика до выявления причин и устранения несоответствия; проверку правильности выбора и ввода начальных параметров системы навигации; выбор режима "Навигация"; ввод начальных координат и дирекционного угла продольной оси топопривязчика; работу топопривязчика в процессе движения; работу топопривязчика на конечном пункте; режим "Техническое обслуживание". Технический результат заключается в обеспечении высокой точности определения навигационных параметров на базе инерциальной автономной аппаратуры топопривязки и навигации с использованием корректирующей информации от внешних источников: навигационной аппаратуры потребителей спутниковых навигационных систем, системы определения высоты. Кроме того, достигается высокая автоматизация процесса определения, регистрации топогеодезических данных. 9 ил.
Способ работы топопривязчика, включающий непрерывное определение в реальном масштабе времени навигационной аппаратурой топопривязчика, включающей в себя бортовой вычислитель, датчики приращения пути и курсовую систему параметров его местоположения и угловой ориентации на стоянке и в движении, отображение на соответствующем устройстве вычислителя текущих значений координат и дирекционного угла продольной оси топопопривязчика и его положения на карте местности, отличающийся тем, что навигационная аппаратура топопривязчика дополнительно обеспечивает непрерывное определение в реальном масштабе времени высоты, углов крена и тангажа, отображение на видеомониторе бортового вычислителя вышеуказанных параметров, комплексирование информации с построенных на различных физических принципах датчиков: датчиков скорости механического и доплеровского, инерциальной автономной аппаратуры топопривязки и навигации, системы определения высоты и навигационной аппаратуры потребителей спутниковых навигационных систем, а также - загрузку в бортовой вычислитель цифровых карт местности с внешнего накопителя, автоматическую смену листов цифровых карт местности любого масштаба при выходе координат за их границу, "склейку" смежных номенклатурных листов цифровой карты местности, определение на цифровой карте местности координат и высоты точек, отмеченных курсором оператора, решение геодезических задач, переход в режим технического обслуживания.
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| Устройство для транспортирования рыбы из невода в лабаз | 1932 |
|
SU32262A1 |
| JP 2001209429 A, 03.08.2001 | |||
| US 2002158778 A1, 31.10.2002. | |||

