Изобретение относится к области радиотехники и может быть использовано для передачи сообщений с подводной лодки, находящейся в погруженном состоянии.
При проектировании кораблей и судов особое внимание уделяется разработке аварийно-спасательных устройств для оказания помощи аварийному кораблю и спасению его личного состава. К этим устройствам относятся и средства связи для подачи сигналов с аварийного корабля и связи с кораблем, оказывающими помощь: аварийный сигнальный буй с телефоном, аварийные буи и аварийная система сигнализации.
Известен сигнальный буй для определения местоположения потерпевшей аварийной подводной лодки [патент Франции №957735, кл. В64С 9/00, 1971 г.], а также выпускное информационное устройство, содержащее приборный контейнер, заглубляющий груз с устройством его отделения [патент РФ на ПМ №94537 от 27.05.2010 г.]. Известны и др. буи [патенты РФ на ПМ №141688 от 06.05.2014 г., №148908 от 19.11.2014 г., №142232 от 20.05.2014 г., №140980 от 16.04.2014 г.] Однако подобные буи, как правило, ограничивают маневренные возможности подводных лодок и демаскируют их [Соловьев В.И. и др. Связь на море. - Л.: изд. «Судостроение», 1978 г.].
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных источниках информации, что указывает на соответствие заявленного устройства условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность передачи информации с ПЛ бесконтактным методом, предусматриваемым существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень»
Целью изобретения является передача сообщений с подводной лодки бесконтактным методом за счет считывания с поверхности воды радиолокационным приемником.
Поставленная цель достигается тем, что под водой на глубине h на днище подводной лодки расположен акустический излучатель fa, облучающий морскую поверхность снизу подводной лодки, а на рубке подводной лодки, в верхнем полупространстве, на расстоянии r от поверхности воды расположен приемопередатчик электромагнитного сигнала на рабочей частоте fe, при этом передача сообщений с подводной лодки в воздух осуществляется бесконтактным методом путем считывания с поверхности воды радиолокационным или оптическим приемником.
На фиг. 1 представлена схема размещения излучателей и приемника относительно границы раздела. Она содержит:
1 - точка расположения акустического излучателя;
2 - граница раздела воздух-вода;
3 - точка расположения приемопередатчика электромагнитного канала;
4 - корпус носителя акустического излучателя;
5 - АК акустический канал;
6 - ЭМ электромагнитный канал.
На схеме под водой на глубине h расположен акустический излучатель частоты fa, облучающий морскую поверхность снизу. В верхнем полупространстве, на расстоянии r от поверхности воды расположен приемопередатчик электромагнитного сигнала 7 на рабочей частоте fe.
В работе Шайдурова Г.Я. и др. О параметрической модуляции электромагнитной волны ультразвуком на границе раздела вода-воздух // Радиотехника и электроника. 1985. Вып. 11. С. 2136-2142, показано, что коэффициент модуляции фазы отраженной электромагнитной волной (ЭМВ) за счет механического колебательного смещения поверхности воды под действием акустического излучения с плотностью потока мощности I зависит от рабочих частот ЭМ и акустического канала как

где Ω - круговая частота акустических колебаний; I - интенсивность акустической волны.
Системное соотношение, связывающее все основные параметры канала, выводится из уравнения дальности для радиолокации. Мощность радиосигнала на входе приемника РЛС определяется в виде

где - PE - мощность на выходе антенны передатчика; r - расстояние от поверхности моря до приемника РЛС; АЕ - эффективная площадь приемопередающей антенны; 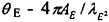 - коэффициент направленности действия антенны РЛС; αE, αа - коэффициенты поглощения радиоволн в воздухе и акустического излучения в воде; σ - эффективная поверхность рассеивания поверхности моря с площадью SП, соответствующая «пятну» ультразвука на границе раздела вода-воздух.
- коэффициент направленности действия антенны РЛС; αE, αа - коэффициенты поглощения радиоволн в воздухе и акустического излучения в воде; σ - эффективная поверхность рассеивания поверхности моря с площадью SП, соответствующая «пятну» ультразвука на границе раздела вода-воздух.
Согласно [Шайдуров Г.Я. и др. Параметрической модуляции электромагнитной волны ультразвуком на границе раздела вода-воздух // Радиотехника и электроника. 1985. Вып. 11. С. 2136-2142] получим

где Ра - мощность акустического сигнала; Аа - эффективная площадь акустической антенны. Для случая зеркального отражения

где λЕ - длина ЭМВ.
Площадь акустического пятна на поверхности воды равна

где λа - длина акустической волны.
При подстановке (5) в (4) для зеркального отражения получим

а в случае диффузного отражения
σД=4SПR,
где R - коэффициент отражения от поверхности рассеивания.
С учетом (5) запишем 
При подстановке (6) и (7) в (2) получим выражение для зеркального отражения

и для диффузионного отражения

где α=αЕ+αа.
Введем соотношение (1), определяющее преимущество варианта зеркального отражения по сравнению с диффузным:

Например, при h=100 м, λa=0,1 м, λЕ=3⋅10-2 м, Аа=1 из (10) получим η=3,14⋅107. Проигрыш диффузного варианта можно существенно уменьшить путем повышения рабочей частоты РЛС. В этом смысле представляет интерес перенос спектра зондирующих сигналов в оптический диапазон. Так, для сине-зеленого цвета с длинной волны около 1 мкм при прочих равных условиях этот проигрыш уменьшится на 8 порядков.
На фиг. 2 приведены графики зависимости требуемой мощности акустического излучения от высоты полета летательного аппарата r и глубины погружения подводной лодки h (зеркальное отражение).
При заданном отношении сигнал/шум q необходимый уровень сигнала на выходе приемной антенны РЛС определяется как Pc=qPш, где из соотношения Больцмана для оценки уровня шума приемника используем известную формулу:

где k=1,38⋅10-23, Вт/(Гц⋅град); 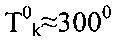 - температура шума приемника; Δƒ - полоса пропускания.
- температура шума приемника; Δƒ - полоса пропускания.
В этом случае из (8) и (9) имеем

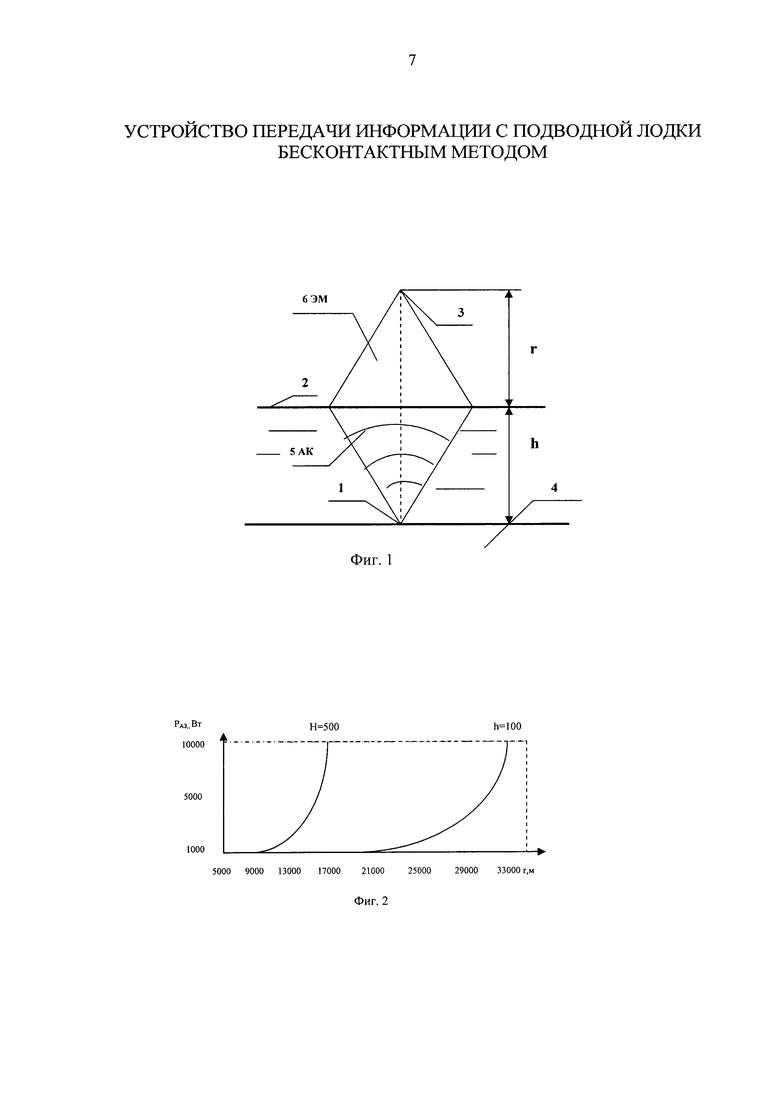
Как видно из этих соотношений, высота полета борта РЛС в сильной мере зависит от отношения длины акустической и ЭМ волн, что может явиться управляющим фактором параметров канала, передачи информации. Из сравнения (12) и (13) также видно, что в случае диффузного отражения величина r существенно меньше зависит от глубины погружения подводной лодки h, что связано с увеличением размера акустического пятна на поверхности воды по мере роста глубины.
Количественные характеристики связи требуемой мощности акустического излучателя с высотой полета носителя РЛС и глубины погружения ПЛ приведены на фиг. 2 и 3. За основу расчетов приняты следующие данные: ρ=10; Δƒ=100 Гц;  РЕ=100 Вт; λa=0,1 м; R=1; АЕ=1 м2; Аа=1 м2. Дополнительное увеличение энергетического потенциала требует учета рефракции акустических колебаний в слоях воды (коэффициент γ в (9), (10). Изменение угла визирования ЭМ луча Θ при пролете спутника над акустическим пятном также снижает эффективность системы.
РЕ=100 Вт; λa=0,1 м; R=1; АЕ=1 м2; Аа=1 м2. Дополнительное увеличение энергетического потенциала требует учета рефракции акустических колебаний в слоях воды (коэффициент γ в (9), (10). Изменение угла визирования ЭМ луча Θ при пролете спутника над акустическим пятном также снижает эффективность системы.
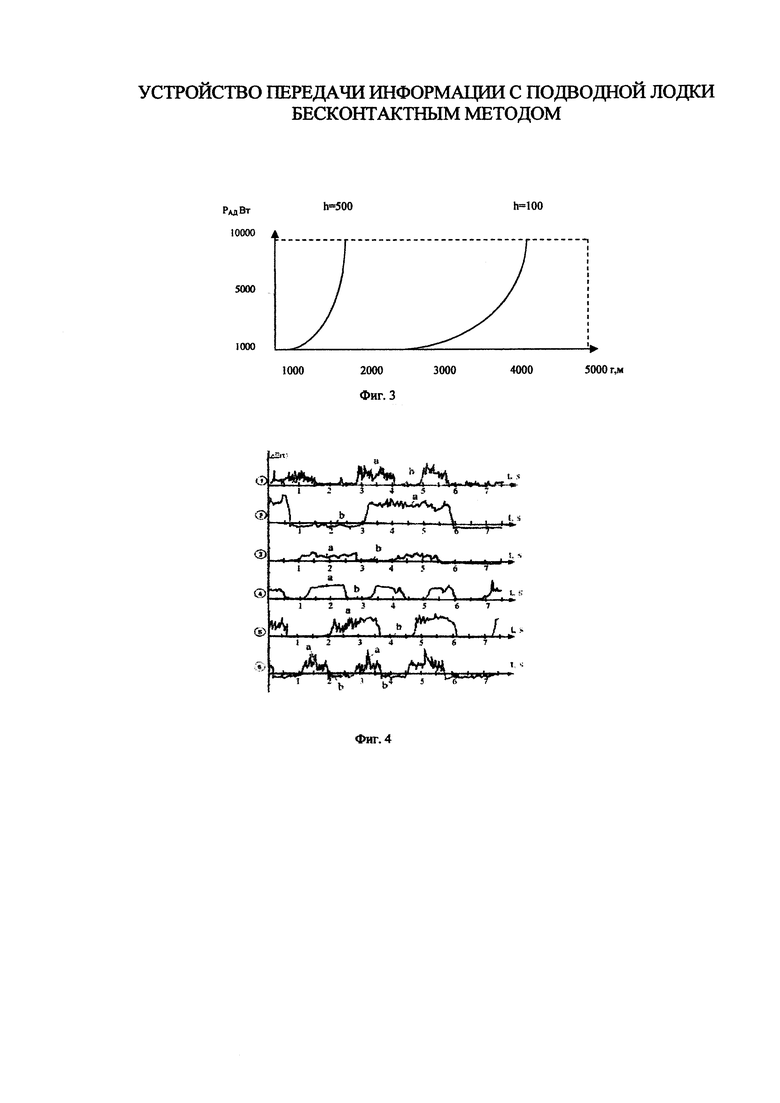
На фиг. 4 приведены копии эпюр сигналов, полученные экспериментально на соленом озере с выхода приемника радиолокатора, работающего на частоте fЭ=10 ГГц. Рабочие частоты акустического излучателя, работавшего в телеграфном режиме, составляли 15 и 80 кГц. Глубина погружения акустического излучателя изменилась в пределах 0,9…3 м [Шайдуров Г.Я. и др. Параметрической модуляции электромагнитной волны ультразвуком на границе раздела вода-воздух // Радиотехника и электроника. 1985. Вып. 11. С. 2136-2142]. Электропроводность воды составляла σ=1,7 См/м. Цифрами на фиг. 4 отмечены различные сочетания акустических частот и глубина погружения, буквами: a - периоды включения акустического излучателя: b - периоды его выключения. Электромагнитный сигнал приемника снимался с выхода фазового детектора.
Как видно из эпюр, момент передачи единицы информации (момент включения акустического излучателя) четко отличается повышением уровня сигнала с выхода фазового детектора. Амплитуда модуляции сигнала шума обусловлена волнением поверхности воды.
Приведенные расчеты показывают возможность передачи сообщений с ПЛ в воздух бесконтактным методом, путем считывания с поверхности воды радиолокационным или оптическим приемником без использования радиобуя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля маршрута движения автономного необитаемого подводного аппарата с возможностью съёма технической информации и устройство для его реализации | 2018 |
|
RU2713516C2 |
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| Способ передачи информации от подводного объекта на летательный аппарат | 2018 |
|
RU2710026C1 |
| Способ обеспечения безопасности функционирования позиционного подводного объекта и устройство для его реализации | 2018 |
|
RU2733646C2 |
| СПОСОБ ОБОЗНАЧЕНИЯ ПОДВОДНОЙ ЛОДКОЙ ПОЛЫНЬИ | 2019 |
|
RU2733635C1 |
| СПОСОБ ПОДАЧИ СИГНАЛОВ ОБ АВАРИИ ПОДО ЛЬДОМ С ПОМОЩЬЮ ГИДРОАКУСТИЧЕСКОГО СИГНАЛИЗАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2520985C2 |
| АВИАЦИОННЫЙ РАДИОГИДРОАКУСТИЧЕСКИЙ БУЙ-ПЛАНЁР | 2022 |
|
RU2780519C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| СПОСОБ ПОДВОДНОГО ПРИЕМА РАДИОСИГНАЛОВ | 2011 |
|
RU2453037C1 |
| СПОСОБ ДОСТАВКИ РАДИОГИДРОАКУСТИЧЕСКОГО БУЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2816334C1 |
Изобретение относится к области радиотехники и может быть использовано для передачи сообщений с подводной лодки, находящейся в погруженном состоянии. Технический результат состоит в передаче сообщений с подводной лодки бесконтактным методом. Технический результат достигается за счет механического колебательного смещения поверхности воды под действием акустического излучения и считывания информации с поверхности воды радиолокационным приемником. 4 ил.
Устройство передачи информации с подводной лодки бесконтактным методом осуществляется за счет того, что под водой на глубине h на днище подводной лодки расположен акустический излучатель fa, облучающий морскую поверхность снизу подводной лодки, а на рубке подводной лодки в верхнем полупространстве, на расстоянии r от поверхности воды расположен приемопередатчик электромагнитного сигнала на рабочей частоте fe, при этом передача сообщений с подводной лодки в воздух производится бесконтактным методом путем считывания с поверхности воды радиолокационным или оптическим приемником.
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| СПОСОБ ПОДВОДНОГО ПРИЕМА РАДИОСИГНАЛОВ | 2011 |
|
RU2453037C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2014 |
|
RU2563316C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

