Изобретение относится к морской технике и служит для ее использования в открытом море в ледовых условиях.
Известен самоходный подводный аппарат (СПА), применяемый для исследовательских целей, поиска морских объектов и других целей. СПА подразделяются на обитаемые подводные аппараты и необитаемые (НПА), которые бывают автономные и дистанционно управляемые. Так, например, автономные и дистанционно управляемые НПА привлекаются для поиска, обнаружения, идентификации и уничтожения морских мин, гидроакустической разведки, сбора гидрографической и батиметрической информации, обследования морских районов и подводных гидротехнических сооружений [1]. К НПА относятся также и торпеды, предназначенные для поражения морских объектов, для чего они дополнительно оснащаются зарядом взрывчатого вещества, взрывателем и бортовой системой управления [2].
НПА активно развиваются в ведущих морских державах и находят все большее применение в морских глубинах. Однако в районах с ледовым покрытием, например, в Арктике, применение НПА ограничивается наличием льда, препятствующего поддержанию с ними связи и подъему на поверхность.
Арктика прилегает к Северному полюсу, включает окраины Евразии, Северной Америки и почти весь Северный Ледовитый океан с находящимися в нем островами и имеет площадь около 27 млн. кв. км [3]. В арктических районах активно действуют военно-морские силы стран, омываемых северными морями: России, США, Канады, Великобритании, Швеции, Норвегии и других. Под влиянием ветров и течений арктические льды находятся в постоянном движении, а их толщина составляет в среднем 1,5-2 м у однолетних льдов и 3 м у многолетних [3].
Интерес приполярных стран к Арктике и Северному Ледовитому океану постоянно возрастает, что связано с ее влиянием на изменения глобального климата, большими залежами полезных ископаемых на арктическом шельфе и военно-политическим значением. ВМС США и Великобритании периодически один раз в два года в марте-апреле проводят здесь специальные «ледовые» учения ICEX (Ice Exercise) и SCICEX (Scientific Ice Expeditions) с выполнением торпедных стрельб, в ходе которых производят испытания и тестирование торпед Mk-48 [4].
Одним из элементов учений является отработка подъема из-подо льда выпущенной практической торпеды, которая включает установку на льду акустических датчиков, а на торпеде - гидроакустических маяков, служащих для обозначения ее местоположения после всплытия под лед. Подъем торпеды осуществляет ледовая команда, действующая на поверхности льда, включающая шесть водолазов. Технология подъема торпеды представляет собой сложную операцию и включает развертывание возле места подъема торпеды специального оборудования, проплавляющего во льду лунку диаметром 90 см, в которую с помощью водолазов заводят торпеду, а потом поднимают и транспортируют ее на базу вертолетом. На подъем одной торпеды уходит в среднем 3-4 часа, но может и полный рабочий день, в зависимости от погодных и ледовых условий [4].
Длительность и сложность извлечения из-подо льда торпеды или другого НПА указанным способом являются его недостатком.
Для сбора данных о характере и состоянии ледового покрова в полностью или частично замерзающих морях применяется ледовая разведка, осуществляемая авиацией, метеорологическими ИСЗ, кораблями и судами, наземными и дрейфующими гидрометео- и радиометеостанциями с применением визуальных и инструментальных технических средств: РЛС бокового обзора, измерителей толщины льда, эхоледомеров, обнаружителей разводий, аэрофотосъемочной аппаратуры, радиационных термометров, актинометрических датчиков. Ледовая разведка выявляет границы ледового покрова, его толщину, сплоченность, наличие трещин и разводий, положение кромки льда, направление и скорость его дрейфа, возраст и торосистость. Она позволяет найти ледяные острова и другие элементы, используемые для разработки ледовых прогнозов и обеспечения действий сил флота, плавания судов, организации дрейфующих станций, создания взлетно-посадочных полос и т.д. [5], [6].
Информация о состоянии ледового покрова и наличии в нем полыней необходима и для подводных лодок для обеспечения их безопасности и организации связи с берегом. Поэтому, каждая обнаруживаемая ею полынья при необходимости учитывается и наносится на карту с тем, чтобы в нужный момент времени ею можно было воспользоваться. Однако, движение льдов, морские течения, накапливаемые ошибки в счислении пути усложняют выход подводной лодки к обозначенной полынье.
Известен способ обозначения полыньи подводной лодкой, являющийся аналогом изобретения, при котором обнаруживают полынью техническими средствами подводной лодки и фиксируют ее координаты, для обозначения полыньи используют плавучий навигационный буй с системой управления, гидроакустическим излучателем и механизмом его заглубления. Способ включает ввод в систему управления буя программы его работы, выпуск буя, его всплытие на поверхность воды, погружение гидроакустического излучателя на заданную глубину и передачу сигналов в соответствии с установленной программой [7]. Способ позволяет подводной лодке контролировать местоположение полыньи в дрейфующем ледовом поле.
Известен способ применения поискового подводного аппарата подо льдом, принятый за прототип изобретения, включающий приготовление его на носителе к пуску, проверку работоспособности бортовой системы управления, ввод в нее программы и маршрута движения, пуск подводного аппарата с носителя, движение по заданному маршруту и отделение подледного радиогидроакустического буя в заданной точке. После выпуска буя с подводного аппарата его приледняют к нижней кромке льда, отделяют нижнюю часть с гидрофоном и акустическим модемом, разматывают кабель и заглубляют на заданную глубину для поиска подводных объектов. После выпуска всех буев подводный аппарат укладывают на грунт, или выпускают плавучий якорь и кладут в дрейф и используют его в качестве ретранслятора для передачи информации об обнаружении подводных объектов на командный пункт по радио- или звукоподводной связи [8]. Способ не предусматривает извлечение подводного аппарата из-подо льда, что является его недостатком. Таким же недостатком обладают и другие способы применения НПА (торпед).
Целью изобретения является разработка способа применения необитаемого подводного аппарата подо льдом, обеспечивающего его извлечение из-подо льда и подъем на поверхность.
Для достижения цели изобретения предлагается способ применения необитаемого подводного аппарата подо льдом, включающий приготовление на носителе необитаемого подводного аппарата к пуску, проверку работоспособности его бортовой системы управления, ввод в нее программы и маршрута движения, пуск подводного аппарата с носителя и движение по заданному маршруту. Дополнительно перед пуском необитаемого подводного аппарата производят ледовую разведку, осуществляемую самим носителем или летательным аппаратом, обнаруживают в ледовом поле в пределах дальности действия необитаемого подводного аппарата полынью или при ее отсутствии ледовой командой создают полынью, фиксируют ее координаты, сбрасывают в полынью плавучий навигационный буй, программными сигналами которого обозначают местоположение полыньи, вводят в бортовую систему управления необитаемого подводного аппарата координаты полыньи и характеристики сигналов навигационного буя. После выполнения необитаемым подводным аппаратом задания направляют его экономичным ходом в район расположения полыньи с заданными координатами, обнаруживают программные сигналы плавучего навигационного буя, наводят подводный аппарат на буй, уменьшают глубину хода, включают эхоледомер и измеряют им толщину льда, при сближении необитаемого подводного аппарата с буем и обнаружении отсутствия на поверхности воды льда или льда заданной толщины, обеспечивающей его разрушение при всплытии подводного аппарата, создают положительную плавучесть подводного аппарата продувкой балластного отсека или надувом поплавка, осуществляют всплытие необитаемого подводного аппарата в полынье на поверхность воды, после чего передают об этом сигнал на пункт управления.
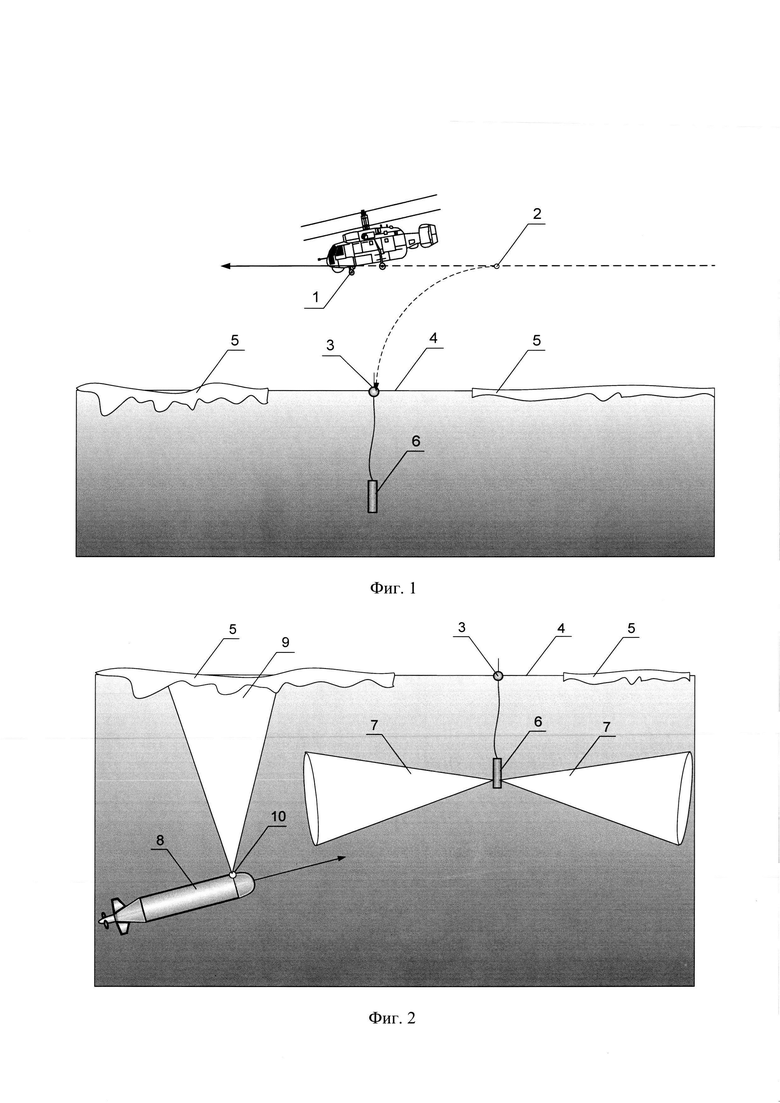
Осуществление способа показано на фиг. 1, 2 и 3.
На фиг. 1 показано обозначение места полыньи с помощью плавучего навигационного буя, сбрасываемого с летательного аппарата, цифрами обозначены: 1 - летательный аппарат, 2 - точка сброса плавучего навигационного буя, 3 - плавучий буй с антенной, 4 - поверхность воды в полынье, 5 - ледовый покров, 6 - гидроакустический излучатель.
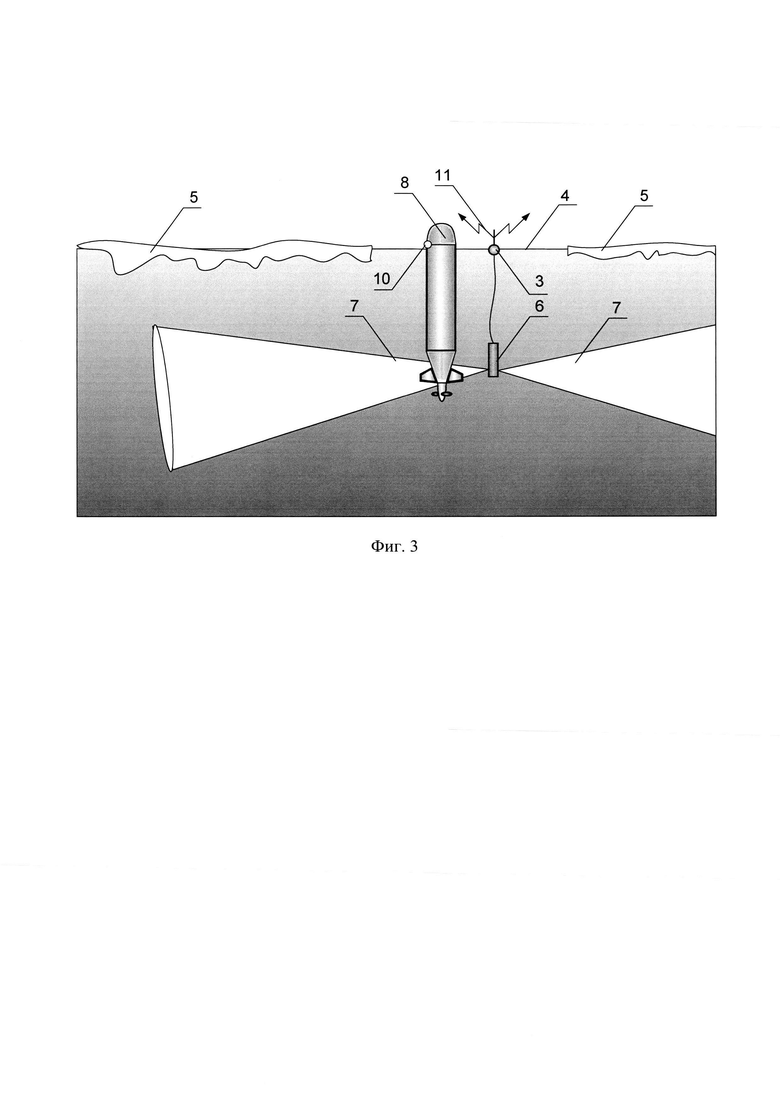
На фиг. 2 изображен необитаемый подводный аппарат, приближающийся к искомой полынье, цифрами показаны: 3 - плавучий буй с антенной, 4 - поверхность воды в полынье, 5 - ледовый покров, 6 - гидроакустический излучатель, 7 - область распространения программного сигнала гидроакустического излучателя, 8 - необитаемый подводный аппарат, 9 - область распространения сигнала эхоледомера НПА, 10 - эхоледомер.
На фиг. 3 показан необитаемый подводный аппарат, всплывший на поверхность воды в обозначенной навигационном буем полынье. Цифрами показаны: 3 - плавучий буй с антенной, 4 - поверхность воды в полынье, 5 - ледовый покров, 6 - гидроакустический излучатель, 7 - область распространения программного сигнала гидроакустического излучателя, 8 - необитаемый подводный аппарат, 10 - эхоледомер, 11 - сигнал на пункт управления о всплытии НПА.
Техническим результатом изобретения является способ применения необитаемого подводного аппарата подо льдом, при котором подводный аппарат после выполнения задания может быть извлечен из-подо льда за счет использования заранее разведанной или специально созданной полыньи и ее обозначения плавучим навигационным буем с программным гидроакустическим сигналом.
Источники информации, использованные при выявлении изобретения и
составлении его описания:
1. И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88.
2. Торпеда. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - С. 431.
3. Арктика. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 27.
4. М. Комаров, В. Поленин. Торпеды уходят под лед // Политическое регулирование №3 (25), 2013.
5. Ледовая разведка. Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 219.
6. Эхоледомер. Энциклопедия. Веб-сайт Министерства Обороны Российской Федерации. http://www.wikipedia.org.ru/
7. Патент на изобретение RU 2733635. Способ обозначения подводной лодкой полыньи / А.В. Черных, А.В. Новиков, Ф.В. Винокуров. М.: ФИПС, 2020. Бюл. №28.
8. Патент на изобретение RU 2650298. Поисковый подводный аппарат и способ его применения / А.В. Иванов, А.В. Новиков. М.: ФИПС, 2018. Бюл. №11.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| СПОСОБ ОБОЗНАЧЕНИЯ ПОДВОДНОЙ ЛОДКОЙ ПОЛЫНЬИ | 2019 |
|
RU2733635C1 |
| САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПОДЪЕМА ИЗ-ПОДО ЛЬДА | 2019 |
|
RU2729852C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ОБ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ ИЗ-ПОДО ЛЬДА | 2022 |
|
RU2783690C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
Изобретение относится к морской технике и служит для ее использования в открытом море в ледовых условиях. Для применения необитаемого подводного аппарата подо льдом обеспечивают проверку работоспособности его бортовой системы управления, ввод в нее программы и маршрута движения, пуск подводного аппарата с носителя и движение по заданному маршруту. Перед пуском необитаемого подводного аппарата производят ледовую разведку, осуществляемую самим носителем или летательным аппаратом, обнаруживают в ледовом поле в пределах дальности действия необитаемого подводного аппарата полынью или при ее отсутствии ледовой командой создают полынью, фиксируют ее координаты, сбрасывают в полынью плавучий навигационный буй, программными сигналами которого обозначают местоположение полыньи. Вводят в бортовую систему управления необитаемого подводного аппарата координаты полыньи и характеристики сигналов навигационного буя. После выполнения необитаемым подводным аппаратом задания направляют его экономичным ходом в район расположения полыньи с заданными координатами, обнаруживают программные сигналы плавучего навигационного буя, наводят подводный аппарат на буй, уменьшают глубину хода, включают эхоледомер и измеряют им толщину льда. При сближении необитаемого подводного аппарата с буем и обнаружении отсутствия на поверхности воды льда или льда заданной толщины, обеспечивающей его разрушение при всплытии подводного аппарата, создают положительную плавучесть подводного аппарата продувкой балластного отсека или надувом поплавка, осуществляют всплытие необитаемого подводного аппарата в полынье на поверхность воды, после чего передают об этом сигнал на пункт управления. Достигается извлечение подводного аппарата из-подо льда и подъем его на поверхность. 3 ил.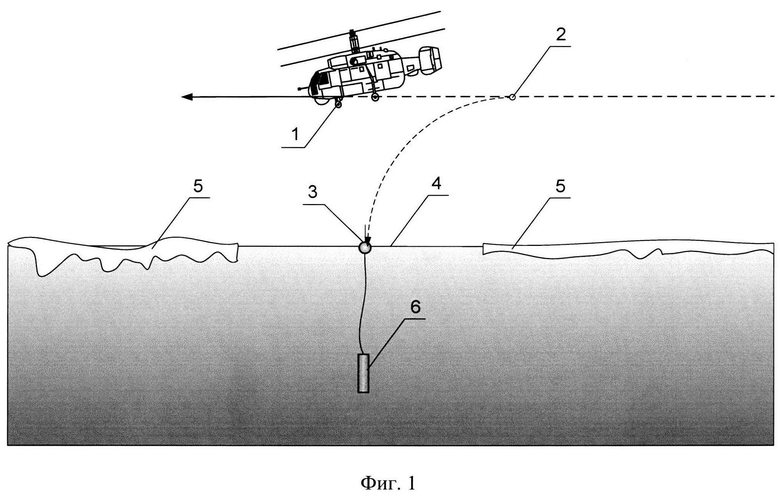
Способ применения необитаемого подводного аппарата подо льдом, включающий приготовление на носителе необитаемого подводного аппарата к пуску, проверку работоспособности его бортовой системы управления, ввод в нее программы и маршрута движения, пуск подводного аппарата с носителя и движение по заданному маршруту, отличающийся тем, что перед пуском необитаемого подводного аппарата производят ледовую разведку, осуществляемую самим носителем или летательным аппаратом, обнаруживают в ледовом поле в пределах дальности действия необитаемого подводного аппарата полынью или при ее отсутствии ледовой командой создают полынью, фиксируют ее координаты, сбрасывают в полынью плавучий навигационный буй, программными сигналами которого обозначают местоположение полыньи, вводят в бортовую систему управления необитаемого подводного аппарата координаты полыньи и характеристики сигналов навигационного буя, после выполнения необитаемым подводным аппаратом задания направляют его экономичным ходом в район расположения полыньи с заданными координатами, обнаруживают программные сигналы плавучего навигационного буя, наводят подводный аппарат на буй, уменьшают глубину хода, включают эхоледомер и измеряют им толщину льда, при сближении необитаемого подводного аппарата с буем и обнаружении отсутствия на поверхности воды льда или льда заданной толщины, обеспечивающей его разрушение при всплытии подводного аппарата, создают положительную плавучесть подводного аппарата продувкой балластного отсека или надувом поплавка, осуществляют всплытие необитаемого подводного аппарата в полынье на поверхность воды, после чего передают об этом сигнал на пункт управления.
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| US 5119341 A1, 02.06.1992 | |||
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ОБОЗНАЧЕНИЯ ПОДВОДНОЙ ЛОДКОЙ ПОЛЫНЬИ | 2019 |
|
RU2733635C1 |

