Изобретение относится к области морской сейсморазведки районов, в том числе покрытых льдом, и может быть использовано при поиске полезных ископаемых, для уточнения строения месторождений углеводородов на морском шельфе, в том числе арктическом шельфе, и повышения эффективности процесса его освоения.
Обычно в морской сейсморазведке используют сейсмический источник и некоторое количество сейсмокос, буксируемых позади сейсморазведочного судна, или погружаемые на морское дно донные антенны. Все эти буксируемые сейсмокосы и донные антенны имеют датчики, которые обнаруживают сейсмическую энергию, которая используется для построения изображений геологических структур под морским дном. Для эффективного фокусирования сейсмокосой или донной антенной сейсмической энергии ее апертура должна быть сопоставима с глубиной изучаемой геологической структуры (обычно первые километры) и, в силу этого, быть достаточно протяженной.
В арктических морях и водоемах, покрытых льдом, сейсморазведка становится намного более трудной и дорогостоящей, а иногда и невозможной по сравнению с выполнением сейсморазведочных работ на открытой воде. Поэтому существует потребность в технических средствах для морской сейсморазведки при наличии ледового покрова.
Известна донная кабельная антенна для мониторинга сейсмоакустической эмиссии на шельфе, содержащая подводный кабель, гидрофонные модули, соединенные подводным кабелем через определенные интервалы расстояния между собой, надводную аппаратуру сбора и преобразования, соединенную с одним из концов подводного кабеля, отличающаяся тем, что она снабжена якорным фиксатором, закрепленным на противоположном конце подводного кабеля, дополнительными грузами, закрепленными на подводном кабеле между соответствующими гидрофонными модулями, и поплавковыми подвесками, закрепленными на подводном кабеле в окрестностях соответствующих гидрофонных модулей, при этом гидрофонные модули выполнены в виде приемников давления (Патент России №2545365, МПК G01S 7/52, приоритет 07.08.2013 г.).
Недостатком известного устройства является невозможность установить донную кабельную антенну под ледовым покровом.
Также известен малогабаритный телеуправляемый подводный аппарат, содержащий раму модульной конструкции, движители горизонтального и вертикального хода, прочные герметичные контейнеры для размещения электронной части подводного аппарата, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, манипуляционный модуль, включающий снабженный охватом манипулятор и герметичный привод, причем манипулятор установлен на выходном валу этого привода, надводный модуль управления, включающий пульт управления, источник электропитания, блок отображения видеоинформации, и кабель связи, соединяющий подводный аппарат с надводным модулем, отличающийся тем, что на другом конце выходного вала привода манипулятора дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр схвата манипулятора, подводный аппарат снабжен съемным перфорированным контейнером для сбора образцов, установленным в верхней части подводного аппарата соосно с его вертикальной осью, а обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части (Патент России №2387570, МПК B63G 8/00, приоритет 29.12.2008 г.).
Известное устройство не предназначено для развертывания (соответственно и свертывания) донной кабельной антенны. Известное устройство также не может быть использовано для этой цели, поскольку не имеет средств для транспортировки кабельной антенны большой протяженности, а при помощи подвижного манипулятора не представляется возможным ее эффективное развертывание и свертывание.
Наиболее близким по технической сущности и достигаемому результату (прототипом) к предлагаемому устройству является устройство для обеспечения сейсмопрофилирования глубоководного морского шельфа методом укладки сейсмокос на морское дно с использованием подводного носителя и способ установки данного устройства на морское дно для обеспечения сейсмопрофилирования глубоководного морского шельфа методом укладки сейсмокос на морское дно с использованием подводного носителя, который доставляется и устанавливается на рабочей точке с помощью многофункциональной подводной станции и удерживается в рабочем положении якорной системой, а сейсмокосы устройства укладываются на морское дно также с помощью многофункциональной подводной станции с использованием стабилизаторов, положение которых в конечной точке фиксируется с помощью якорей, устанавливаемых необитаемыми подводными аппаратами с многофункциональной подводной станции (Патент России №2460096, МПК G01V 1/38, 25.06.2010 г.).
Недостатком известного способа является сложная конструкция, состоящая по крайней мере из многофункциональной подводной станции, подводного носителя и необитаемых подводных аппаратов. Использование многофункциональной подводной станции при наличии ледового покрова ограничивает область ее применение только глубоководным морским шельфом, в то время как наиболее перспективные месторождения углеводородов расположены на мелководном арктическом шельфе. Кроме того, для сейсмопрофилирования глубоководного морского шельфа в заявленном устройстве необходимо соединение двух частей антенны в одну систему под водой, для чего требуется наличие манипуляторов и сложной системы управления.
Отмеченные недостатки отсутствуют в автоматическом устройстве для развертывания и свертывания донной антенны под водой и под ледовым покровом, которое является предметом предлагаемого изобретения.
Техническим результатом предлагаемого изобретения является возможность автоматического развертывания и свертывания протяженной донной антенны (сейсмокосы) для сейсморазведки и сейсмоакустического мониторинга шельфовых месторождений углеводородов вне зависимости от климатических условий и ледовой обстановки, а также оперативного получения данных сейсморазведки и сейсмоакустического мониторинга в реальном масштабе времени.
Технический результат достигается за счет разработанных нами технических решений, а именно:
- выбора специальной формы корпуса подводного устройства в виде вертикального диска, обеспечивающей размещение катушки с сейсмокосой большой протяженности и вертикальную стабилизацию подводного устройства;
- совмещения функции кабеля электропитания подводного устройства и сейсмокосы, которая намотана на катушку, являющуюся элементом корпуса подводного устройства;
- использования системы двигателей, движителей, клапанов, датчиков, кабелеукладчика и блока электроники, обеспечивающих автоматическое или управляемое движение подводного устройства с огибанием профиля дна на заданном от него расстоянии и развертывание-свертывание сейсмокосы на морское дно в подводном положении.
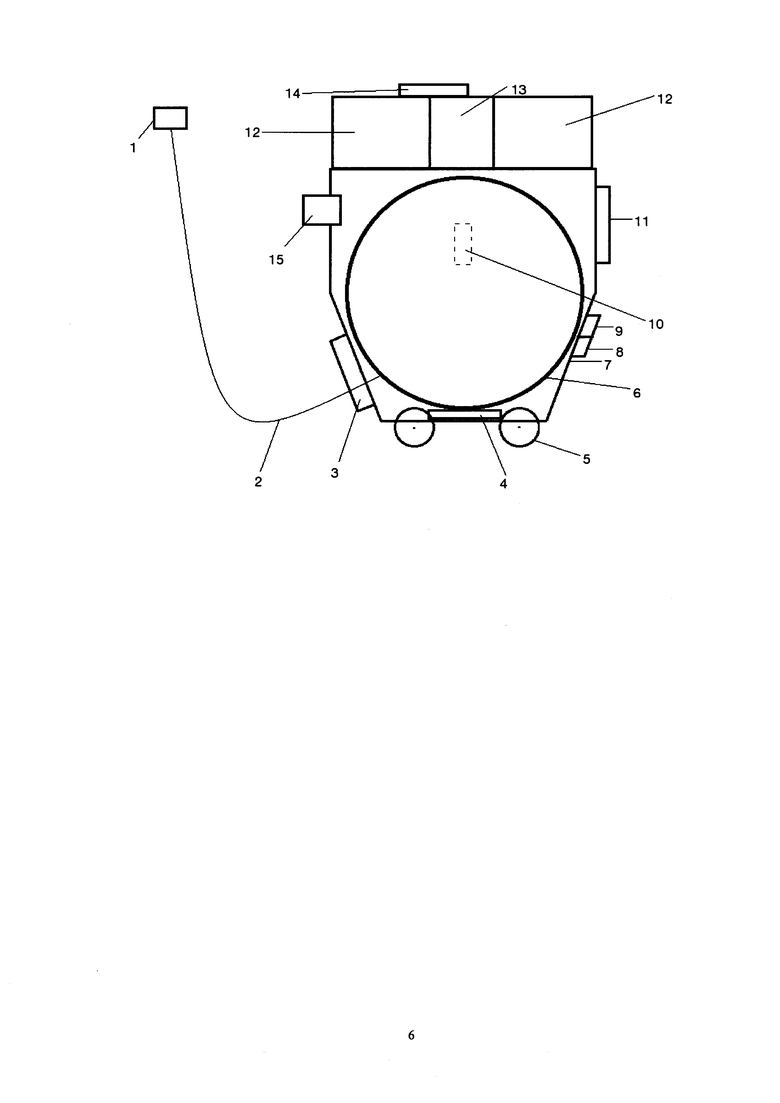
Сущность изобретения поясняется чертежом. На чертеже представлены: 1 - бортовая аппаратура, 2 - цифровая кабельная сейсмокоса, 3 - кабелеукладчик, 4 - блок управляющей электроники, 5 - колеса, 6 - катушка, 7 - металлический корпус, 8 - кинокамера, 9 - ультразвуковой сонар, 10 - вертикальный движитель, 11 - баллон со сжатым воздухом, 12 - поплавки, 13 - балластная емкость, 14 - система позиционирования, состоящая из гироскопа, компаса, альтиметра и датчика давления, 15 - маршевый движитель.
Система погружения и всплытия состоит из поплавков 12 и балластной емкости 13, баллона со сжатым воздухом 11, соединенного с балластной емкостью управляемым клапаном, и вертикального движителя. Вертикальная стабилизация подводного устройства обеспечивается конструктивным разнесением центра масс и центра водоизмещения за счет размещения поплавков в верхней части модуля и тяжелых элементов в его нижней части. Переменная плавучесть модуля обеспечивается изменением объема емкости системы погружения и всплытия при помощи системы клапанов и запаса воздуха, находящегося в баллоне под давлением. Стабилизация по глубине осуществляется вертикальным движителем. Управление движением по курсу в горизонтальной плоскости осуществляется маршевым движителем с изменяемым вектором тяги за счет его размещения на поворотном устройстве.
Система управления автоматикой подводного устройства состоит из системы позиционирования 14 (гироскоп, компас, альтиметр, датчик давления), ультразвукового сонара 9, кинокамеры 8, системы управления вертикальным 10 и маршевым 15 движителями (трастером).
Управление осуществляется через блок управляющей электроники 4 в автоматическом или управляемом режиме посредством связи с бортовой аппаратурой 1 на борту при помощи канала передачи данных, интегрированного в цифровую кабельную сейсмокосу 2.
Устройство работает следующим образом. На борту несущего судна устройство через сейсмокосу подключается к источнику питания и бортовой аппаратуре, затем оно опускается за борт в воду (при наличии ледового покрова - с ледокола в образованную им полынью). Далее за счет работы системы погружения-всплытия и системы позиционирования устройство опускается на заданную глубину (заданное расстояние до дна). После этого подводное устройство начинает движение в заданном направлении по показанию компаса (в автоматическом или управляемом режиме) с одновременным раскладыванием сейсмокосы на морское дно за счет вращения катушки 6, на которую намотана цифровая кабельная сейсмокоса 2, и работы кабелеукладчика 3. При этом показания системы позиционирования (гироскопа, компаса, альтиметра и датчика давления) 14 используются для обхода возможных препятствий и удержания подводного устройства на заданном расстоянии от дна. Длина выпущенной сейсмокосы контролируется числом оборотов катушки. После раскладки всей сейсмокосы подводное устройство опускается на дно за счет выпуска воздуха из балластной емкости. Далее сейсмокоса включается в режим регистрации и записи сейсмоакустических сигналов. После окончания регистрации и записи сейсмоакустических сигналов подводное устройство подвсплывает на заданную глубину и начинает свертывание сейсмокосы за счет вращения катушки и работы кабелеукладчика. Маршевый движитель при этом не используется. После сворачивания всей сейсмокосы подводное устройство всплывает на поверхность и поднимается на борт судна.
Для удобства перемещения устройства на судне и на суше в его конструкции предусмотрены колеса 5. С их помощью также возможен спуск устройства в воду с необорудованного берега и его обратный подъем с помощью стандартной лебедки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ЛЕДОКОЛЬНОГО СУДНА И КОМПЛЕКСА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562747C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ СЕЙСМОКОС НА МОРСКОЕ ДНО ДЛЯ СЕЙСМОАКУСТИЧЕСКОГО МОНИТОРИНГА | 2013 |
|
RU2545092C2 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ | 2013 |
|
RU2549303C2 |
| Комплекс для сейсморазведки в транзитных зонах на основе мультилинейной цифровой кабельной антенны | 2016 |
|
RU2650097C1 |
| ГЕОФИЗИЧЕСКИЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА И МОРСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2576351C2 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления | 2015 |
|
RU2607076C1 |
| СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621638C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
Изобретение относится к области морской сейсморазведки районов, в том числе покрытых льдом, и может быть использовано при поиске полезных ископаемых, для уточнения строения месторождений углеводородов на морском шельфе, в том числе арктическом шельфе, и повышения эффективности процесса его освоения. Заявлено автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом, в котором предложена форма корпуса подводного устройства в виде вертикального диска, обеспечивающего размещение катушки с сейсмокосой большой протяженности и вертикальную стабилизацию подводного устройства. В устройстве совмещены функции кабеля электропитания подводного устройства и сейсмокосы, которая намотана на катушку, являющуюся элементом корпуса подводного устройства. Также использованы системы двигателей, движителей, клапанов, датчиков, кабелеукладчика и блока электроники, обеспечивающих автоматическое или управляемое движение подводного устройства с огибанием профиля дна на заданном от него расстоянии и развертывание-свертывание сейсмокосы на морское дно в подводном положении. При наличии ледового покрова подводное устройство с саморазвертывающейся сейсмокосой можно опустить в воду с борта несущего ледокола в образованную им полынью, после чего происходит автоматическое или управляемое развертывание сейсмокосы на морское дно с последующей регистрацией и записью сейсмоакустических сигналов. После завершения регистрации и записи происходит автоматическое свертывание сейсмокосы и подъем устройства на борт. Технический результат - возможность автоматического развертывания и свертывания протяженной донной антенны (сейсмокосы) для сейсморазведки и сейсмоакустического мониторинга шельфовых месторождений углеводородов вне зависимости от климатических условий и ледовой обстановки, а также оперативного получения данных сейсморазведки и сейсмоакустического мониторинга в реальном масштабе времени. 1 з.п. ф-лы, 1 ил.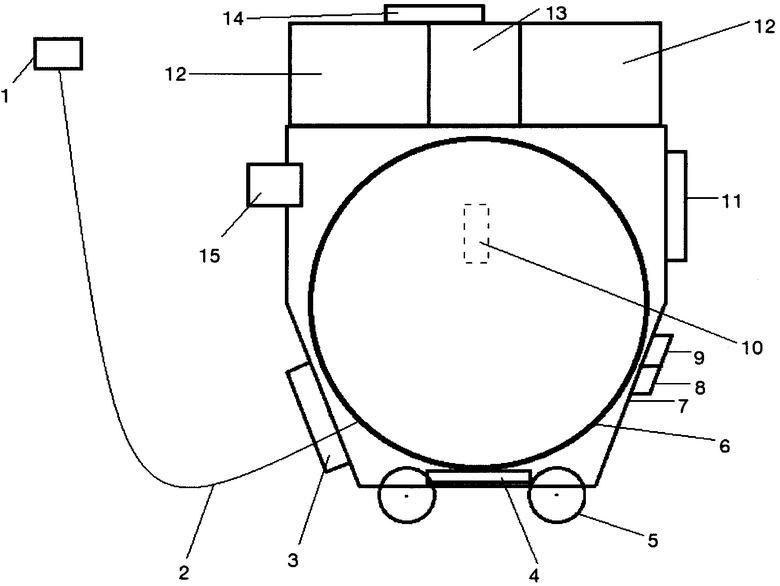
1. Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом, представляющее собой подводный аппарат-носитель, состоящий из металлического корпуса, катушки, кабельной сейсмокосы, поплавков и балластной емкости, отличающееся тем, что выбрана специальная форма корпуса подводного устройства в виде вертикального диска, обеспечивающая размещение катушки с сейсмокосой большой протяженности и вертикальную стабилизацию подводного устройства за счет размещения поплавков в верхней части подводного устройства и тяжелых элементов в его нижней части, совмещены функции кабеля электропитания подводного устройства и сейсмокосы, которая намотана на катушку, являющуюся элементом корпуса устройства, использована система двигателей, движителей, клапанов, датчиков, кабелеукладчика и блока электроники, обеспечивающих автоматическое и управляемое движение подводного устройства с огибанием профиля дна на заданном от него расстоянии и развертывание-свертывание сейсмокосы на морское дно в подводном положении.
2. Устройство по п. 1, отличающееся тем, что подводное устройство снабжено колесами, расположенными в нижней части корпуса, для удобства перемещения устройства на судне, на суше и для спуска устройства в воду с необорудованного берега и его обратного подъема с помощью стандартной лебедки.
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ СЕЙСМОПРОФИЛИРОВАНИЯ ГЛУБОКОВОДНОГО МОРСКОГО ШЕЛЬФА МЕТОДОМ УКЛАДКИ СЕЙСМОКОС НА МОРСКОЕ ДНО С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО НОСИТЕЛЯ И СПОСОБ УСТАНОВКИ ДАННОГО УСТРОЙСТВА НА МОРСКОЕ ДНО | 2010 |
|
RU2460096C2 |
| US 20140104985 A1, 17.04.2014 | |||
| US 20150101420 A1, 16.04.2015 | |||
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2006 |
|
RU2317572C1 |
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2010 |
|
RU2427860C1 |
| СПОСОБ ПРОВЕДЕНИЯ 3D ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2011 |
|
RU2485554C1 |

