Изобретение относится к системам электроснабжения, а именно к системе тягового электроснабжения железнодорожного транспорта, в частности к способу определения энергетических показателей движения поезда и системы тягового электроснабжения (СТЭ).
Целью изобретения является повышение точности определения энергетических показателей движения поезда и СТЭ.
Оценка эффективности перевозочного процесса на электрической тяге и реализация мероприятий, направленных на повышение энергетической эффективности, опираются на определение энергетических показателей движения поездов и СТЭ в различных режимах ведения поезда, для различных вариантов организации движения поездов, с учетом характеристик тяговых подстанций, тяговой сети и др.
Проектирование новых электрифицируемых участков, а также реконструкция и модернизация существующих неразрывно связаны с проведением электрических расчетов, в ходе которых определяются различные энергетические показатели работы СТЭ. В настоящее время известен целый ряд методов расчета энергетических показателей системы тягового электроснабжения: по заданному расположению поездов; по сечениям графика движения поездов; по заданным размерам движения поездов [1] и др. В свете развития вычислительной техники наибольшее распространение получил метод расчета по сечениям графика движения поездов на основе так называемых мгновенных схем. В этом случае уменьшение шага в расчетах при получении сечений графика движения поездов позволяет повысить точность определения энергетических показателей СТЭ.
Решение задачи определения основных показателей работы СТЭ электрифицированных железных дорог основано на проектных расчетах с помощью соответствующих методик и программ, примерами которых могут являться методики расчета параметров тяговых сетей переменного тока [2, 3].
Актуальным является вопрос повышения точности расчетов при определении расхода и потерь электроэнергии, решение которого позволяет получить результаты, адекватные данным измерений, например, по определению расхода потерь электроэнергии в тяговой сети [4].
Указанные выше методы расчета энергетических показателей СТЭ основаны на определении электрических нагрузок по графику движения поездов. При этом в основе определения тяговой нагрузки лежит тяговый расчет, выполняемый при условии сохранения постоянным напряжения на токоприемнике электроподвижного состава. Проведение расчетов на основе данного подхода вносит неточности в расчет, связанные с тем, что напряжение в контактной сети во времени непрерывно изменяется и может достигать предельных значений, что, однако, в данных расчетах не учитывается. Указанное обстоятельство приводит к тому, что токораспределение, потери напряжения и мощности, расход и потери энергии в тяговой сети и энергетические показатели движения поезда определяются с недостаточной степенью точности.
Наиболее близким к предложенному решению является способ, реализованный в [5, 6]. В данном способе выполняется перерасчет напряжения при выполнении тяговых расчетов.
К недостаткам предложенного способа относятся:
1) отсутствие учета условий применения рекуперативного торможения. В частности, не рассматривается возможность так называемого «срыва» рекуперации, когда режим рекуперативного торможения прекращается при превышении допустимого уровня напряжения на токоприемнике электроподвижного состава;
2) отсутствие расчета баланса мощности в межподстанционных зонах, с одной стороны, отпускаемой от тяговых подстанций и смежных межподстанционных зон, с другой стороны, потребляемой на тягу и рекуперируемой электроподвижным составом, потерями мощности в тяговой сети.
Технический результат предлагаемого изобретения заключается в повышении точности определения энергетических показателей движения поезда и СТЭ в границах анализируемого участка. На каждом шаге расчетов по графику движения поездов на основе тяговых расчетов вычисляются параметры СТЭ с учетом рассчитанного напряжения на токоприемнике каждой единицы электроподвижного состава (ЭПС) и пересчета его тяговых характеристик.
Сравнение заявленного способа определения энергетических показателей движения поезда и СТЭ с существующими аналогами показывает, что пошаговый учет изменяющегося напряжения на токоприемнике ЭПС с пересчетом характеристик ЭПС в различных режимах ведения поезда, в том числе в режиме рекуперативного торможения, возможность которого определяется на основе баланса мощностей и учитывает предельно допустимый уровень напряжения на токоприемнике и условия перехода из рекуперативного торможения в пневматическое или совмещения обоих видов торможения ни в области электроснабжения, ни в других областях техники, не использовался.
Отличиями от ранее известных способов определения энергетических показателей движения поезда и СТЭ являются повышение точности расчетов на основе корректного определения значений напряжения на каждом расчетном шаге; пересчет тяговых характеристик ЭПС на каждом шаге расчета с учетом скорректированного напряжения на токоприемнике ЭПС в различных режимах движения поезда; учет возможности применения рекуперативного торможения; учет изменения напряжения на токоприемнике в режиме рекуперативного торможения; составление баланса приема и потребления мощности в межподстанционной зоне с учетом рекуперации.
Определение энергетических показателей движения поезда и СТЭ осуществляется в следующем порядке.
Тяговые расчеты выполняются методом интегрирования уравнения движения поезда с максимальной величиной шага интегрирования Δt=1 с для каждого поезда в четном и нечетном направлениях по расчетным размерам движения поездов с учетом серии электроподвижного состава, массы состава и нагрузки на ось.
На первом шаге интегрирования расчета начальное значение напряжения на токоприемнике Uk=1 принимается равным номинальному в контактной сети, начальная скорость движения поезда - Vk=1=V0 (0 км/ч) и начальная координата поезда на плане пути - Sk=1=0 км. В случае проследования поезда в начальном пункте без остановки скорость поезда Vk=1 определяется установленной скоростью проследования главных путей станций или перегонов.
На каждом k-м шаге интегрирования определяется величина тормозного пути до остановочного пункта при заданной скорости Vk, км

где tп - время подготовки тормозов к действию в зависимости от типа состава, типа тормозов и количества осей состава, ч;
Vост - скорость проследования остановочного пункта, км/ч;
ζ - величина, обратная приведенной массе одной тонны веса поезда, 103км/ч2;
ϑр - расчетный тормозной коэффициент поезда;
ϕкр - расчетный коэффициент трения тормозных колодок;
w0k - результирующее основное удельное сопротивление движению поезда, Н/кН;
ic - крутизна уклона приведенного элемента профиля.
Режим торможения применяют с текущего шага интегрирования до остановки поезда в остановочном пункте при выполнении неравенства

где SОП - координата остановочного пункта, км;
lno - длина приемоотправочных путей остановочного пункта, км.
В режиме торможения поезда на каждом шаге интегрирования определяют величины тормозной силы Вкk (кН), удельного замедляющего усилия Bкk (Н/кН), значение падения скорости ΔVk.
Режим тяги при движении поезда применяют при выполнении неравенства

В этом случае по тяговым характеристикам FK(V) определяется значение силы тяги Fкk (кН) на k-м шаге интегрирования для скорости Vk.
Расчет величины удельной силы тяги на k-м шаге интегрирования осуществляется по формуле, Н/кН

где mс - масса состава (т);
mл - масса локомотива (т);
g - ускорение свободного падения, м/с2.
Расчет величины удельного ускоряющего усилия на k-м шаге интегрирования производится по формуле, Н/кН

Значение приращений скорости ΔVk (км/ч) и пройденного пути ΔSk (км) определяется по формулам соответственно
Расчет конечного времени k-го шага интегрирования tk+1 (с), скорости Vk+1 (км/ч) осуществляется по формулам соответственно

Значение скорости, определенное по выражению (9), проверяют на выполнение неравенства

где  - максимально допустимая скорость для расчетной категории поездов на участке пути с координатой Sk+1.
- максимально допустимая скорость для расчетной категории поездов на участке пути с координатой Sk+1.
При выполнении неравенства (10) принимается, что  , и на шаге k+1 для w0+ic≥0 режимом ведения поезда выбирается выбег. При этом принимается ƒкk+1=0. Если выполняется неравенство w0+ic<0, в качестве режима выбирается торможение и для скорости Vk+1 по тормозным характеристикам Bк(V) определяется величина тормозной силы Bкk+1 (кН), для которой находятся удельное замедляющее усилие (Н/кН) и падение скорости (км/ч) соответственно по выражениям
, и на шаге k+1 для w0+ic≥0 режимом ведения поезда выбирается выбег. При этом принимается ƒкk+1=0. Если выполняется неравенство w0+ic<0, в качестве режима выбирается торможение и для скорости Vk+1 по тормозным характеристикам Bк(V) определяется величина тормозной силы Bкk+1 (кН), для которой находятся удельное замедляющее усилие (Н/кН) и падение скорости (км/ч) соответственно по выражениям
Расчет конечной координаты на k-м шаге интегрирования Sk+1 (км) выполняется для четного и нечетного направлений по выражениям соответственно

Расчет средней скорости движения Vk cp на k-м шаге интегрирования осуществляется по формуле, км/ч

Полученное значение расчетного напряжения применяется на шаге интегрирования k+1 применительно к рассматриваемому поезду. Далее осуществляется пересчет токовых характеристик для скорости V', определяемой по выражению, км/ч 
где V - скорость, определяемая по тяговой характеристике для номинального напряжения Uном, км/час.
Для режима тяги по токовым характеристикам Id(V) для Vk cp определяется значение тягового тока Idk поезда.
Выполняется проверка возможности применения рекуперативного торможения. В случае выполнения неравенства (2) с k-го шага применяется торможение. Режим торможения определяется в следующем порядке.
Определяется величина тормозной силы Вкk для скорости Vk, затем по выражениям (11) и (12) - величина byk и приращение скорости ΔVk соответственно. По характеристикам рекуперативного торможения Ip(V) для Vk cp находится значение тока рекуперации Ipk поезда.
Для каждой межподстанционной зоны, в которой созданы условия для перехода в режим рекуперативного торможения, и смежных с ней зон выполняется проверка выполнения неравенства

где  - мощность рекуперативного торможения
- мощность рекуперативного торможения

 - суммарная мощность электроподвижного состава, не находящегося в режиме рекуперативного торможения на рассматриваемой межподстанционной зоне и смежных с ней;
- суммарная мощность электроподвижного состава, не находящегося в режиме рекуперативного торможения на рассматриваемой межподстанционной зоне и смежных с ней;
 - суммарные потери мощности, обусловленные передачей энергии рекуперации на рассматриваемой межподстанционной зоне и смежных с ней.
- суммарные потери мощности, обусловленные передачей энергии рекуперации на рассматриваемой межподстанционной зоне и смежных с ней.
В случае, если неравенство (17) выполняется, по характеристикам рекуперативного торможения находится Ipk+1(Vk+1). Напряжение на токоприемнике определяется по следующему выражению:

Условия для применения рекуперативного торможения будут выполняться до тех пор, пока выполняется неравенство

где Uдоп - максимальное допустимое напряжение на ЭПС.
Если неравенство (17) или (20) не выполняется, электроподвижной состав переходит в режим пневматического торможения, при этом ток составит 
Для режима выбега принимается Idk=0. При этом учитывается потребление электроэнергии на собственные нужды. Ток собственных нужд электроподвижного состава определяется по выражению, А

где Рс.н - мощность собственных нужд электроподвижного состава.
Полный ток электроподвижного состава определяется для режимов тяги, выбега и пневматического торможения и для режима рекуперативного торможения в общем виде соответственно по формулам

Для участков переменного тока значение тока во всех ветвях схемы замещения определяется по выражению

где  - матрица контурных токов, представляющая собой вектор размером n×1
- матрица контурных токов, представляющая собой вектор размером n×1

 - матрица независимых контуров размером n×v, составленная из чисел 0, 1, -1, строки которой соответствуют номеру главного контура схемы замещения, а столбцы - номеру ветви. Если направление обхода контура совпадает с направлением тока в ветви, то в соответствующую ячейку
- матрица независимых контуров размером n×v, составленная из чисел 0, 1, -1, строки которой соответствуют номеру главного контура схемы замещения, а столбцы - номеру ветви. Если направление обхода контура совпадает с направлением тока в ветви, то в соответствующую ячейку  ставят 1, если не совпадает, то -1, если ветвь не обходится, то 0;
ставят 1, если не совпадает, то -1, если ветвь не обходится, то 0;
 - транспонированная матрица независимых контуров размером v×n;
- транспонированная матрица независимых контуров размером v×n;
 - матрица электродвижущих сил ветвей, представляющая собой вектор размером v×1. Если в одной ветви содержится несколько электродвижущих сил, то результирующее значение определяется как сумма комплексных значений этих электродвижущих сил
- матрица электродвижущих сил ветвей, представляющая собой вектор размером v×1. Если в одной ветви содержится несколько электродвижущих сил, то результирующее значение определяется как сумма комплексных значений этих электродвижущих сил

 - матрица источников тока, представляющая собой вектор размером v×1, составленный из значений токов электроподвижного состава
- матрица источников тока, представляющая собой вектор размером v×1, составленный из значений токов электроподвижного состава  для соответствующей ветви
для соответствующей ветви

 - квадратная матрица комплексных сопротивлений ветвей, размер которой определяется количеством ветвей схемы замещения и равен v×v. При этом главная диагональ матрицы содержит собственные сопротивления ветвей
- квадратная матрица комплексных сопротивлений ветвей, размер которой определяется количеством ветвей схемы замещения и равен v×v. При этом главная диагональ матрицы содержит собственные сопротивления ветвей  ,
,  …
… , а остальные ячейки - сопротивления взаимоиндукции соответствующих ветвей
, а остальные ячейки - сопротивления взаимоиндукции соответствующих ветвей  ,
,  и т.д.
и т.д.
Определяются потенциалы всех узлов схемы замещения  (В), в соответствии со вторым законом Кирхгофа или иным способом, учитывая, что известны значения токов и сопротивлений ветвей схемы замещения.
(В), в соответствии со вторым законом Кирхгофа или иным способом, учитывая, что известны значения токов и сопротивлений ветвей схемы замещения.
Определяется значение напряжения на токоприемнике ЭПС как разность потенциалов узлов схемы в комплексном виде

где  - потенциал узла, соединяющего соответствующую тяговую нагрузку и контактный провод, В;
- потенциал узла, соединяющего соответствующую тяговую нагрузку и контактный провод, В;
 - потенциал узла, соединяющего соответствующую тяговую нагрузку и рельс, В.
- потенциал узла, соединяющего соответствующую тяговую нагрузку и рельс, В.
Составляется матрица напряжений на токоприемнике ЭПС, представляющая собой вектор размером 1v×ν

Если расчетное время tk+l≥24 ч (или больше заданного в расчетах интервала времени) ,расчет для данного участка завершается.
Для участков постоянного тока электрические расчеты проводятся по выражению

где  - квадратная матрица сопротивлений ветвей, размер которой определяется количеством ветвей схемы замещения и равен v×v.
- квадратная матрица сопротивлений ветвей, размер которой определяется количеством ветвей схемы замещения и равен v×v.
Расчет напряжений на токоприемнике электроподвижного состава постоянного тока выполняется по выражению (29).
Расход электроэнергии по шинам группы i-x тяговых подстанций определяется по выражению

где  - расход электроэнергии на k-м шаге расчетов, определяемый как сумма с накоплением;
- расход электроэнергии на k-м шаге расчетов, определяемый как сумма с накоплением;
 - суммарный ток тяговой нагрузки i-й подстанции на k-м шаге расчетов;
- суммарный ток тяговой нагрузки i-й подстанции на k-м шаге расчетов;
 - напряжение на шинах i-й тяговой подстанции на k-м шаге расчетов.
- напряжение на шинах i-й тяговой подстанции на k-м шаге расчетов.
Расход электроэнергии по группе j-x ЭПС определяется на k-м шаге расчетов отдельно для рекуперативного торможения и других режимов по выражению

где  - напряжение на токоприемнике j-го ЭПС на k-м шаге расчетов;
- напряжение на токоприемнике j-го ЭПС на k-м шаге расчетов;
 - ток j-го ЭПС на k-м шаге расчетов для тяги (рекуперации) соответственно.
- ток j-го ЭПС на k-м шаге расчетов для тяги (рекуперации) соответственно.
Потери в тяговой сети на k-м шаге расчетов определяются по выражению

где Ik nn - контурный ток в nn-й ветви схемы замещения на k-м шаге расчета.
Сущность предлагаемого способа определения энергетических показателей движения поезда и СТЭ проиллюстрирована на следующем примере его реализации в границах одной межподстанционной зоны.
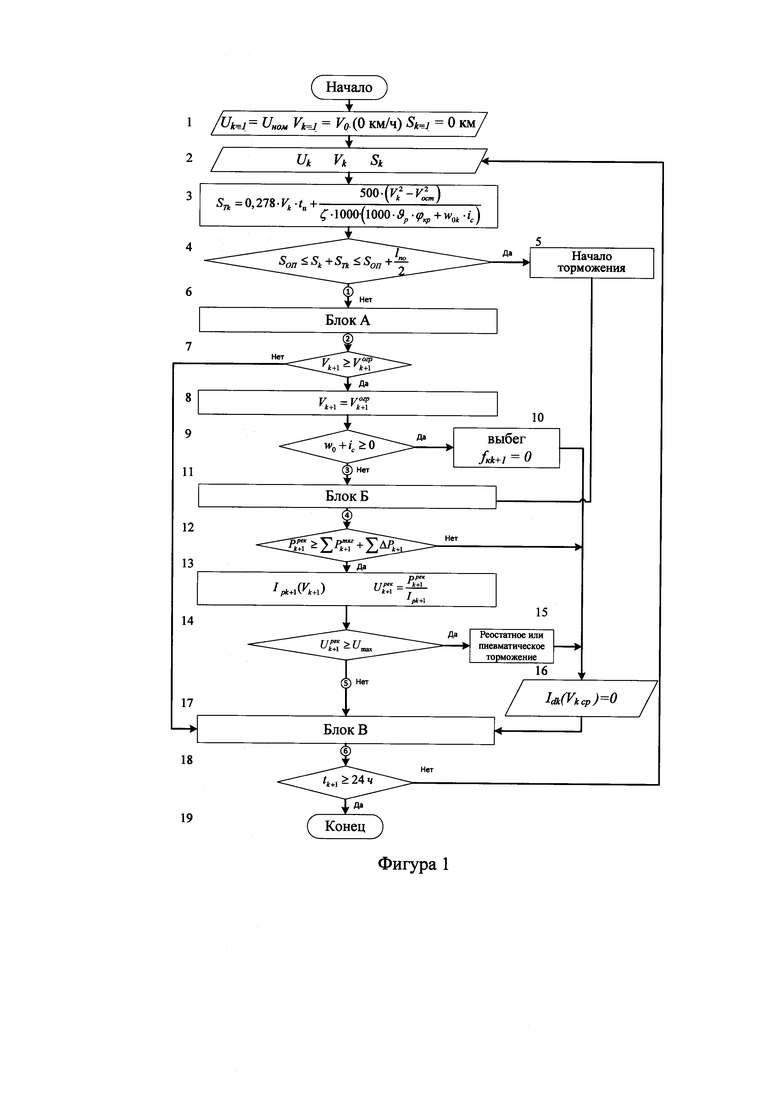
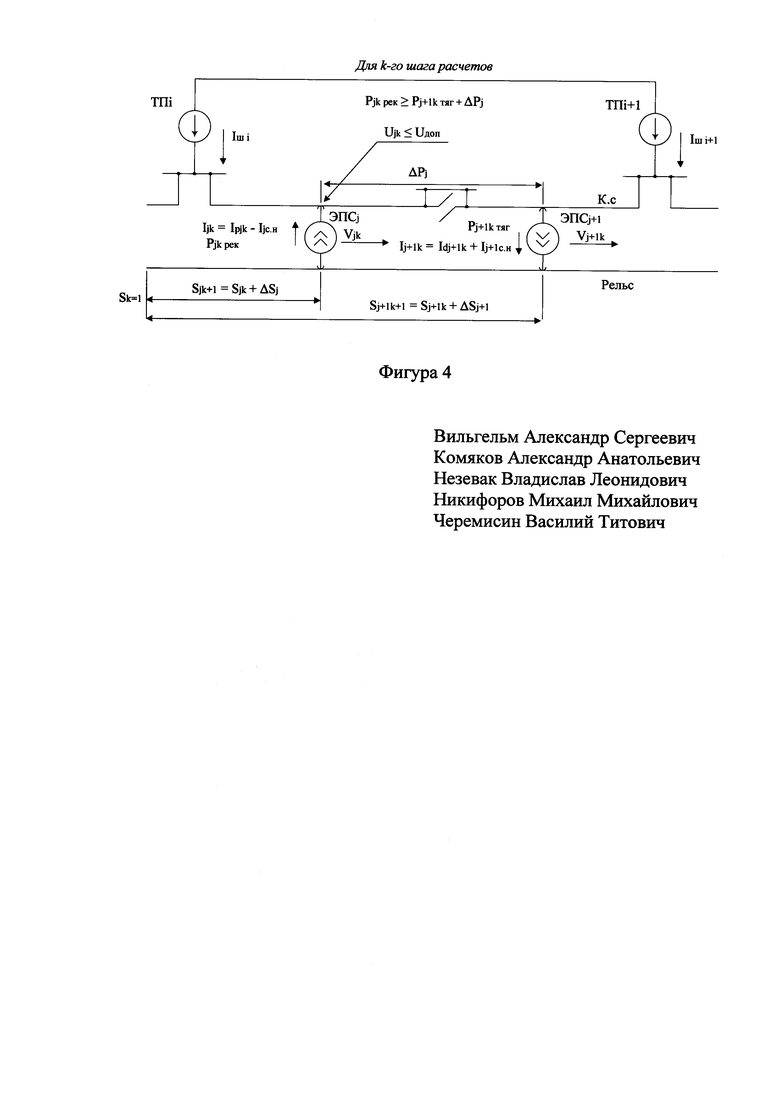
На фиг. 1 представлен порядок расчета энергетических показателей ЭПС и СТЭ.
На начальном этапе расчетов (блок 0) осуществляется задание начальных значений напряжения, скорости и ординаты движения поезда (блок 1). В блоке 3 на основании данных о напряжении, скорости и ординате каждого поезда (блок 2) определяется тормозной путь поезда на k-м шаге расчетов. В случае, если величина тормозного пути недостаточна для остановки поезда (блок 4), осуществляется торможение (блок 5, блок Б), в противном случае осуществляется расчет тягового усилия для поезда (блок А). Результатом расчетов блока А являются значения токов и скоростей движения каждого поезда.
По окончании расчетов по определению приращения скорости выполняется проверка соблюдения ограничения скорости движения (блок 7). При превышении ограничения скорость принимается равной скорости ограничения и режим тяги сменяется режимом выбега (блок 10) или торможения (блок Б). Выбор режима торможения в блоке Б осуществляется исходя из мощности рекуперативного торможения и создания условий для его применения на межподстанционной зоне. Условия определяются при выполнении неравенства мощностей рекуперативного торможения и мощности потребления электроподвижным составом (блок 12). При соблюдении условий для применения рекуперативного торможения по тяговым характеристикам электроподвижного состава определяются токи и напряжение на токоприемнике (блок 13). При допустимом напряжении на токоприемнике расчеты переходят к определению энергетических параметров СТЭ (блок В), в случае превышения напряжения сверх допустимого выполняется электрическое, пневматическое или комбинированное торможение (блок 15), при этом ток поезда принимается равным току собственных нужд.
Блок В расчетов позволяет на основе метода контурных токов определить токи и напряжения элементов схемы замещения на k-м шаге и определить расход и потери электроэнергии по шинам тяговых подстанций и электроподвижного состава (в т.ч. в режиме рекуперативного торможения) как сумму с накоплением.
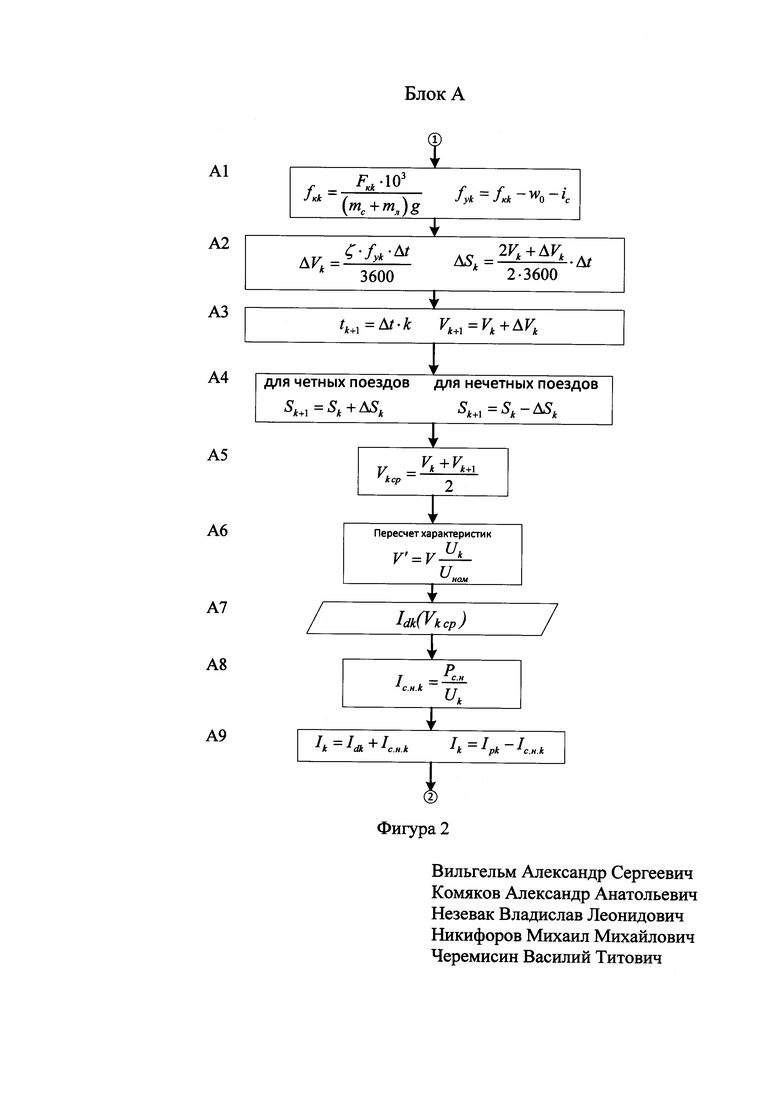
На фиг. 2 представлен блок Б расчетов. В блоке А1 определяются удельная сила тяги и удельное ускоряющее усилие. Далее в блоке А2 определяются приращения скорости и пройденного пути на k-м шаге. В блоке A3 определяются время на каждом шаге расчетов и значение скорости для каждой единицы ЭПС. В блоке А4 определяются координаты нахождения ЭПС отдельно для поездов, следующих в четном и нечетном направлениях. Средняя скорость определяется в блоке А5. С учетом изменения напряжения на токоприемнике ЭПС выполняется перерасчет скорости движения на k-м шаге (блок А6). По тяговым характеристикам определяются токи ЭПС (блок А7). Суммарный ток ЭПС определяется с учетом собственных нужд (блоки А8 и А9).
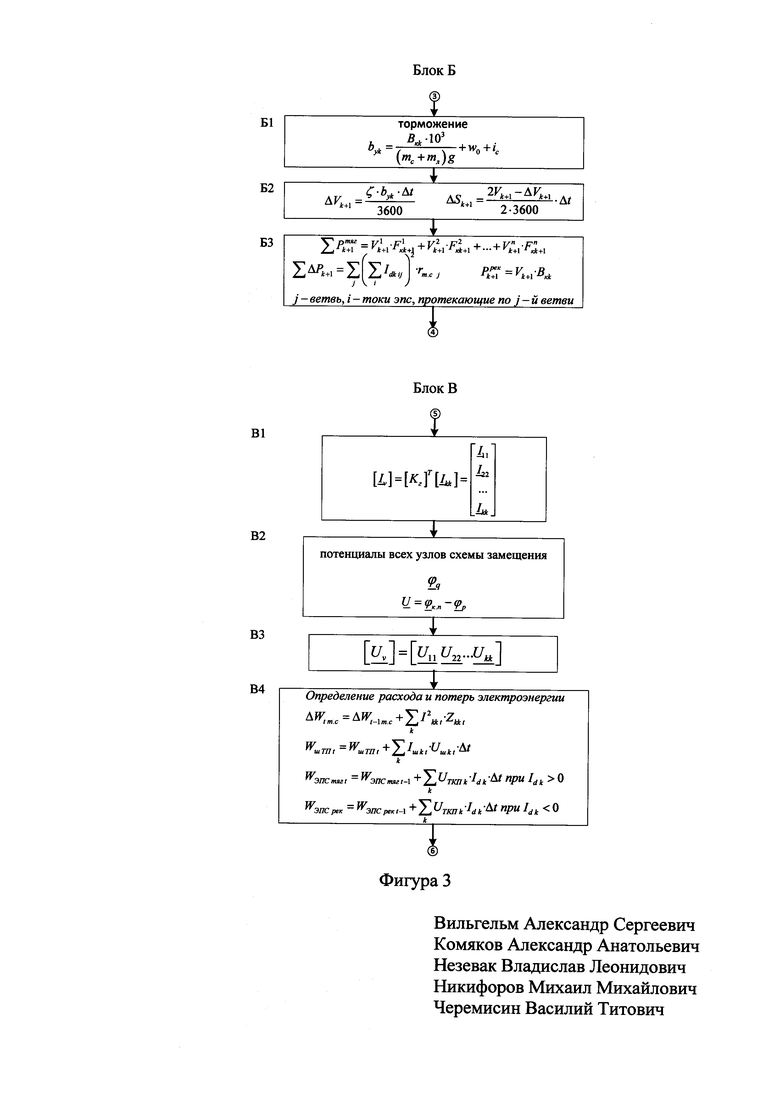
На фиг. 3 представлен блок Б и блок В расчетов. В блоке Б определяются удельные замедляющие усилия, значения падения скорости и приращения координаты (блоки Б1 и блоки Б2). На завершающем этапе (блок Б3) определяется суммарная мощность тяги и рекуперативного торможения для последующей проверки условий применения рекуперативного торможения.
Блок В расчетов позволяет на основе определения токов во всех ветвях схемы замещения СТЭ (блок В1) и потенциалов и напряжений во всех узлах (блоки В2 и В3) определить потери и расход электроэнергии (в т.ч. для ЭПС для режима тяги и рекуперативного торможения).
На фиг. 4 представлена схема замещения, поясняющая порядок проведения расчетов. Электроподвижной состав на схеме представлен в виде двух единиц - ЭПСj и ЭПСj+1, находящихся в режиме рекуперативного торможения и тяги соответственно. Возможность рекуперативного торможения на каждом шаге определяется на основе баланса мощности и условия сохранения напряжения на токоприемниках ЭПС ниже допустимого уровня. Расход электроэнергии по шинам подстанций TПi и TПi+1 определяется по расчетным тока шин IШ. Расход электроэнергии электроподвижным составом осуществляется отдельно для режима рекуперативного торможения и других режимов на основе токов ЭПС - Ip jk.
Предложенный усовершенствованный метод определения энергетических показателей движения поезда и СТЭ позволяет учитывать изменяющийся уровень напряжения при проведении тяговых расчетов и корректировать тяговые нагрузки в электрическом расчете на последующих шагах моделирования, уровень напряжения в узлах СТЭ, потери и расход электроэнергии, а также значения коэффициента реактивной мощности. Предложенный метод позволяет повысить точность тяговых и электрических расчетов и может применяться при моделировании СТЭ, в частности, при рассмотрении различных схем питания и секционирования и вариантов усиления СТЭ, а также для оценки эффективности применения различных устройств.
Список использованных источников
1. Справочник по электроснабжению железных дорог. В 2-х т.Т. 1. / Под ред. К.Г. Марквардта. - М.: Транспорт. 1980. - 256 с.
2. Марский В.Е. Методика и программа расчета параметров многопроводных тяговых сетей переменного тока на ЭВМ серии ЕС [Текст] / В.Е. Марский // Трансэлектропроект: Инструктивно-методические указания. 1985. №2. С. 4-42.
3. Крюков А.В. Управление системами тягового электроснабжения железных дорог [Текст] / Крюков А.В., Закарюкин В.П., Абрамов Н.А. // Управление большими системами: сборник трудов. 2010. №29. С. 201-213.
4. Черемисин В.Т. Оценка технологических потерь в тяговой сети в условиях применения электроподвижным составом рекуперативного торможения [Текст] / Черемисин В.Т., Вильгельм А.С, Незевак В.Л.// Вестник Ростовского гос. ун-та путей сообщения. - 2014. №2. С. 106-111.
5. Марквардт Г.Г. Алгоритм тягового расчета при заданном времени хода по участку постоянного тока с учетом изменяющегося напряжения на токоприемнике электровоза в режимах тяги и рекуперации. Сб. науч. тр. ВНИИЖТ, М.: 1974. Вып. 520.
6. Тарута П.В. Алгоритм расчета системы тягового электроснабжения постоянного тока при наличии рекуперации электрической энергии // Современные технологии железнодорожному транспорту и промышленности. Материалы Всероссийской научно-практической конф. Хабаровск, 2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ДВИЖЕНИЯ ПОЕЗДА И СИСТЕМЫ ТЯГОВОГО ЭЛЕКТРОСНАБЖЕНИЯ | 2018 |
|
RU2690126C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ В ТЯГОВОЙ СЕТИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2014 |
|
RU2572797C2 |
| УСТРОЙСТВО ЭЛЕКТРОСНАБЖЕНИЯ КОНТАКТНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2404500C1 |
| УСТРОЙСТВО ИЗОЛИРУЮЩЕГО СОПРЯЖЕНИЯ КОНТАКТНОЙ СЕТИ И НЕЙТРАЛЬНОЙ ВСТАВКИ ДЛЯ ВЫСОКОСКОРОСТНЫХ МАГИСТРАЛЕЙ ЖЕЛЕЗНЫХ ДОРОГ, ЭЛЕКТРИФИЦИРОВАННЫХ НА ПЕРЕМЕННОМ ТОКЕ | 2013 |
|
RU2533768C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИСТЕМЫ ТЯГОВОГО ЭЛЕКТРОСНАБЖЕНИЯ | 2020 |
|
RU2735158C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ СИСТЕМЫ ТЯГОВОГО ЭЛЕКТРОСНАБЖЕНИЯ | 2022 |
|
RU2787898C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2016 |
|
RU2629622C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2023 |
|
RU2811608C1 |
| Способ управления электроподвижным составом и системой тягового электроснабжения | 2021 |
|
RU2778164C1 |
| СИСТЕМА КОММЕРЧЕСКОГО УЧЕТА ЭЛЕКТРОЭНЕРГИИ, ПОТРЕБЛЯЕМОЙ ТЯГОВЫМ ПОДВИЖНЫМ СОСТАВОМ | 2010 |
|
RU2427916C1 |
Изобретение относится к системам электроснабжения железнодорожного транспорта. Способ определения энергетических показателей движения поезда и системы тягового электроснабжения заключается в том, что на каждом шаге моделирования на основе тяговых расчетов с учетом напряжения на токоприемнике по графику движения поездов вычисляют параметры электроподвижного состава и системы тягового электроснабжения. На основании параметров определяют тяговые и тормозные усилия поезда, скорость движения и пройденное поездом расстояние, а также ток, потребляемый каждым поездом с учетом потребления на собственные нужды. При этом определение тока электроподвижного состава в режиме рекуперативного торможения осуществляют на основе проверки условий рекуперации по балансу мощности тяги и рекуперации и проверки по допустимому уровню напряжения на токоприемнике. Определяют энергетические показатели электроподвижного состава и системы тягового электроснабжения, корректируют график движения поездов, и расчет повторяется до окончания рассматриваемого интервала времени. Технический результат изобретения заключается в повышении точности определения энергетических показателей движения поезда и системы тягового электроснабжения. 4 ил.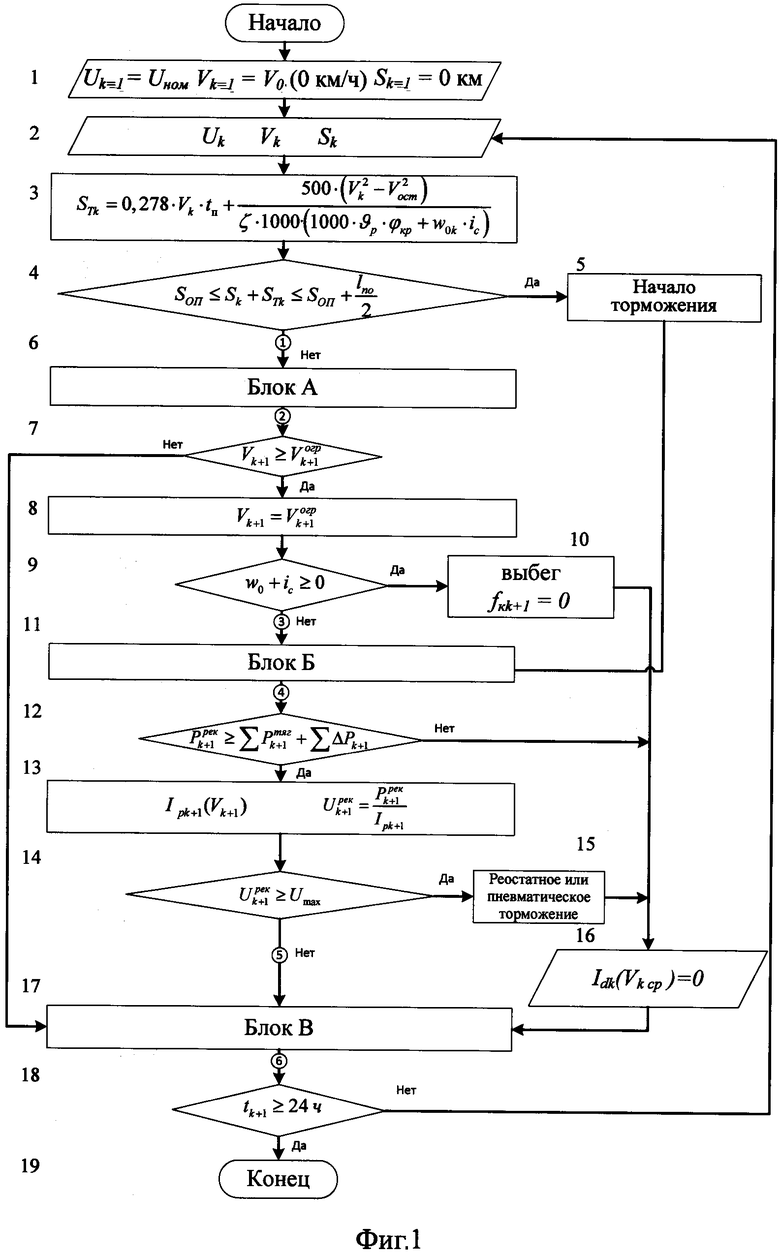
Способ определения энергетических показателей движения поезда и системы тягового электроснабжения, отличающийся тем, что на каждом шаге моделирования на основе тяговых расчетов с учетом определенного на каждом шаге напряжения на токоприемнике каждой единицы электроподвижного состава по графику движения поездов вычисляются параметры электроподвижного состава и системы тягового электроснабжения, на основании которых определяются тяговые и тормозные усилия поезда, скорость движения и пройденное поездом расстояние, а также ток, потребляемый каждым поездом в различных режимах движения с учетом потребления на собственные нужды, при этом определение тока электроподвижного состава в режиме рекуперативного торможения осуществляется на основе проверки условий рекуперации по балансу мощности тяги и рекуперации и проверки по допустимому уровню напряжения на токоприемнике электроподвижного состава на межподстанционной и смежной с ней зонах, после чего определяются энергетические показатели электроподвижного состава и системы тягового электроснабжения, корректируется график движения поездов, и расчет повторяется до окончания рассматриваемого интервала времени.
| Пресс-форма для получения восковых моделей | 1948 |
|
SU80600A1 |
| СПОСОБ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ ПОЕЗДОПОТОКА ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ | 2005 |
|
RU2297353C1 |
| Способ изготовления печатных схем | 1957 |
|
SU112441A1 |
| DE 102005055243 A1, 31.05.2007. | |||

