Изобретение относится к контрольно-измерительной технике и может быть использовано в составе информационно-вычислительных комплексов для автоматического допускового контроля и диагностики контроля параметров и технического состояния электрических цепей кабельно-жгутовых сетей, включающих в качестве второго проводника корпус изделия.
Известно устройство контроля изоляции электрических цепей (патент РФ №2299444, МПК G01R 31/02, опубл. 20.05.2007), содержащее источник постоянного оперативного тока, фильтр присоединения указанного источника между фазами сети и землей, блок контроля величины оперативного тока на транзисторе, вход которого включен последовательно и согласно с источником оперативного тока и зашунтирован встречно включенным полупроводниковым прибором, источник пульсирующего эталонного тока, источник питания, исполнительный релейный элемент, фильтр переменной составляющей тока, к выходу которого через диод присоединен указанный исполнительный релейный элемент, причем в указанный блок контроля величины оперативного тока включены второй, третий и четвертый транзисторы, отличающийся от остальных типом проводимости.
Недостатком известного устройства контроля изоляции электрических цепей является отсутствие возможности контроля сопротивления изоляции и других параметров электрических цепей объектов контроля в автоматическом режиме, имеющих тысячи контролируемых точек.
Наиболее близкой к нашему техническому решению является автоматизированная система контроля электромонтажа и сопротивления изоляции жгутов (авт. св. №1704109, МПК G01R 31/02, опубл. 07.01.92 г. Бюл. №1), содержащая блок общего управления, блоки ввода и вывода, блок контрольно-измерительного сигнала, блок измерения сопротивления изоляции, шунтирующее реле, коммутатор многоуровневого управления и коммутации, причем первый вход блока управления соединен с выходом блока ввода, первый выход - с блоком вывода, а второй выход - с первым входом блока измерений, выход блока контрольного сигнала соединен с контрольным входом коммутатора, входные клеммы которого соединены с клеммами для подключения объекта контроля, шунтирующее реле, обмотка которого соединена с третьим выходом блока управления, а нормально замкнутые контакты присоединены параллельно к второму и третьему входам блока измерений, второй вход которого соединен с входом блока контрольного сигнала, третий вход - с измерительным входом коммутатора, адресные входы блока управления соединены с адресными выходами соответствующего уровня коммутатора, а управляющие выходы - с управляющими входами соответствующего уровня коммутатора, состоящего из блоков коммутации первого, второго, третьего и т.д. уровней управления.
Недостатком прототипа является отсутствие технической возможности контроля параметров бортовых кабельных сетей автономных объектов, имеющих однопроводную распределенную кабельно-жгутовую сеть, вторым проводом которой является корпус объекта, соединенный с помощью металлизированного заземляющего контакта.
Предложенная система свободно от указанных недостатков.
Цель изобретения - расширение функциональных возможностей и быстродействия прототипа и реализация методики допускового контроля за счет создания контрольно-измерительного контура с использованием корпуса изделия и функциональных блоков допускового контроля.
Цель достигается в результате того, что в известной автоматизированной системе контроля электромонтажа и сопротивления изоляции жгутов, содержащей блок управления, блок ввода, блок вывода, блок контрольного сигнала, блок измерений, коммутатор, причем первый вход блока управления соединен с выходом блока ввода, первый выход - с блоком вывода, а второй выход - с первым входом блока измерений, выход блока контрольного сигнала соединен с контрольным входом коммутатора, входные клеммы которого соединены с клеммами для подключения объекта контроля, шунтирующее реле, обмотка которого соединена с третьим выходом блока управления, а нормально замкнутые контакты присоединены параллельно к второму и третьему входам блока измерений, второй вход которого соединен с входом блока контрольного сигнала, третий вход - с измерительным входом коммутатора, адресные входы блока управления соединены с адресными выходами соответствующего уровня коммутатора, а управляющие выходы - с управляющими входами соответствующего уровня коммутатора, состоящего из блоков коммутации первого, второго, третьего и т.д. уровней управления, что в указанной системе предлагается изменить схему коммутации контрольно-измерительной цепи с использованием заземляющих контактов коммутатора, при этом контур контрольно-измерительной цепи охватывает корпус объекта контроля за счет распределенных контрольно-измерительных устройств, контролируя параметры электрической цепи и переходное сопротивление металлизированного заземляющего контакта.
Коммутация контрольно-измерительной цепи создается локальными контрольно-измерительными коммутаторами, разнесенными и распределенными по месту нахождения контролируемых разъемов объекта контроля, при этом первый адрес контролируемой цепи подключается одним из этих коммутаторов на свою шину контроля и измерения, а контур контрольно-измерительной цепи создается последовательной коммутацией остальных адресов контролируемой цепи на корпус автономного объекта и через корпус и металлизированный заземляющий контакт на второй заземленный вход блока контроля, измерения и сравнения коммутатора первого адреса.
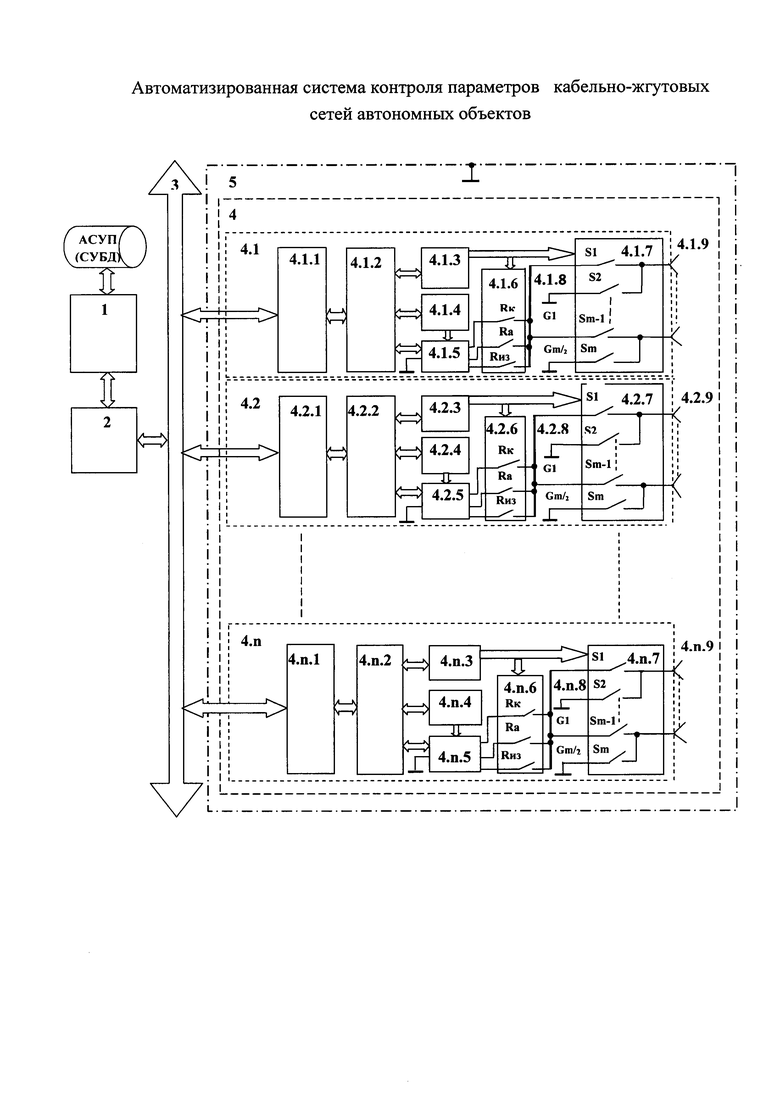
Предлагаемая система иллюстрируется чертежом, где представлена блок-схема системы контроля параметров кабельно-жгутовых сетей для автономных объектов.
Она содержит блок 1 общего управления, блок 2 сетевого информационного обмена, магистраль 3 информационного обмена, распределенную сеть 4 локальных контрольно-измерительных коммутаторов 4.1…4.n, каждый из которых включает в себя соответственно блок 4.1.1…4.n.1 информационного обмена, блок 4.1.2…4.n.2 управления и вычисления, блок 4.1.3…4.n.3 управления коммутаторами, блок 4.1.4…4.n.4 задатчик допустимых пределов параметров, блок 4.1.5…4.n.5 контроля, измерения и сравнения, коммутатор 4.1.6…4.n.6 выбора режимов работы, шину 4.1.8…4.n.8 контроля и измерения, заземляющих шин G1…Gm/2 блоков 4.1.7…4.n.7 коммутаторов и точек входа - выхода блоков 4.1.9…4.1.n разъемов для подключения объекта контроля.
Система работает следующим образом.
В блок 1 из базы данных (СУБД) вводится таблица соединений в адресах объекта контроля с информацией о сечении, длине и типе провода, на основании которой рассчитываются сопротивления электрических цепей, а с учетом стыковочных карт таблица соединений преобразовывается в адреса подключаемых разъемов блоков 4.1.9…4.1.n коммутаторов 4.1…4.n, то есть в адреса программы контроля, причем цепи контроля сортируются так, чтобы последовательность коммутации контрольно-измерительных сигналов обеспечивалась в определенном порядке по локальным коммутаторам и программа контроля с управляющей информацией посредством блока 2 сетевого обмена, магистрали 3 и блоков 4.1.1…4.n1 передается в блоки 4.1.2…4.n.2 управления и вычисления, взаимодействуя с которыми блок 1 общего управления обеспечивает выполнение алгоритмов работы режимов системы, основными из которых являются режим "КОНТРОЛЬ Ra" контроля правильности монтажа и сопротивления электрических цепей, режим "КОНТРОЛЬ Rиз" контроля сопротивления изоляции проводников бортовых кабельно-жгутовых сетей, режим "КОНТРОЛЬ Rк" контроля металлизированного заземления на корпус и другие при необходимости режимы за счет увеличения коммутирующих элементов в коммутаторах 4.1.6…4.n.6 выбора режимов и расширения функциональных возможностей блоков 4.1.5…4.n.5 контроля, измерения и сравнения.
Каждый коммутатор 4.1…4.n является автономным контрольно-измерительным тестером, взаимодействующими друг с другом по магистрали 3 информационного обмена по выполнению общей задачи автоматического контроля бортовой кабельно-жгутовой сети, каждый из блоков 4.1.2…4.n.2 обрабатывает свой массив информации и в процессе контроля для каждой контролируемой цепи назначает предел допуска параметров и передает в соответствующий блок 4.1.4…4.n.4, а блоки 4.1.5…4.n.5, измеряя параметры своей контролируемой цепи, сравнивают их значения с заданными допусками и выдают в соответствующий свой блок 4.1.2…4.n.2 результаты допускового контроля по принципу «НОРМА»/«НЕ НОРМА», при этом выходные точки блоков 4.1.9…4.1.n разъемов коммутаторов 4.1…4.n по контролируемым точкам объединены корпусом посредством коммутирующих элементов четными ключами S2, S4…Sm коммутаторов 4.1.7…4.n.7, блоки управления коммутаторами 4.1.3…4.n.3 обеспечивают адресную, последовательную, комбинированную или групповую коммутацию корпуса, а контрольно-измерительные шины 4.1.8…4.n.8 могут подключаться к выходным точкам в пределах каждого своего коммутатора.
При работе в режиме "КОНТРОЛЬ Ra" в исходном состоянии ключи Ra в каждом коммутаторе 4.1.6…4.n.6 выбора режимов замыкаются все, а ключи каждого контрольно-измерительного коммутатора разомкнуты. Процесс контроля происходит по кадрам, т.е. по отдельным электрическим цепям, имеющим любое сочетание входов - выходов на подключенные разъемы, при этом если один из адресов проверяемой цепи подключен, например, на первый локальный контрольно-измерительный коммутатор 4.1, то он назначается ведущим и подключает точку входа - выхода на шину 4.1.8, на которую с блока 4.1.5 выдается сигнал от источника стабилизированного тока определенного значения, существенно превышающего значения помех в корпусе и длинных цепях.
Далее по алгоритму коммутатор 4.1.7 ведущего коммутатора 4.1 замыкает все цепи точек контролируемой цепи на корпус и контролирует наличие тока по шине 4.1.8, при этом, если ток фиксируется блоком 4.1.5, то это свидетельствует о наличии электрической цепи в виде схемной цепи или ложной цепи. Далее блок 4.1 отрабатывает поиск адресов перемычек параллельно-последовательной коммутацией на корпус всех точек входа выхода блока 4.1, а при появлении тока фиксируется адрес и значение уровня напряжения на контролируемой цепи, вычисляется значение электрического сопротивления и сравнивается с заданным значением с блока 4.1.4 с учетом допустимых отклонений, таким образом реализуя метод допускового контроля, при этом заданное значение формируется исходя из расчетных по таблице соединения на каждую цепь из базы данных или по техническим требованиям на объект контроля в виде значения максимально допустимого порога. В этом случае корпус объекта контроля не используется, так как цепи находятся в одном разъеме. Если эта цепь замыкается на один или несколько контактов блока 4.2.9, то в соответствии с алгоритмом ведущий блок 4.1, взаимодействуя с блоком 4.2, параллельно-последовательным поиском находит адреса электрических цепей и ведущий блок аналогичным образом производит допусковый контроль параметров всех цепей данного кадра контроля. При этом контур контрольно-измерительной цепи образовывается от контрольно-измерительной шины 4.1.8 через цепь объекта контроля, корпус блока 4.2, корпус автономного объекта, корпус блока 4.1, измеряется, сравнивается в блоке 4.1.5 и анализируется в блоке 4.1.2.
Общим алгоритмом предусмотрено последовательно-групповая и последовательная коммутация всех входных - выходных точек блоков 4.1.9…4.n.9 распределенной сети коммутаторов 4 для выявления всех схемных, ложных, перепутанных и обрывных цепей. Если адрес контрольно-стимулирующего сигнала коммутируется другим блоком 4.2…4.n распределенной сети 4, например 4.5.1, то он является ведущим и все функции управления по контролю конкретной цепи или группы цепей (кадров) берет на себя. В заключение этого режима от ведущих блоков 4.2.1…4.n.2 принимается отчет блоком и формируется протокол проверки бортовой кабельной сети по режиму "КОНТРОЛЬ Ra".
В режиме "КОНТРОЛЬ Rк" проверка переходных сопротивлений металлизированных соединений на корпус производиться только для цепей, имеющих выходы на технологические разъемы, соединенные своими контактами проводниками минимальной длины и номинальным сечением, исключающими значимую погрешность на процесс измерения. Процесс контроля отличается от режима "КОНТРОЛЬ Ra" тем, что в исходном состоянии ключи Rк в каждом коммутаторе 4.1.6…4.n.6 выбора режимов замыкаются все, а контролируемая цепь формируется двумя адресами, одним из которых является входом и подключается к одной из шин 4.1 8…4.n.8, а другой коммутируется на корпус одним из блоков 4.1.7…4.n.7 и далее процесс допускового контроля происходит аналогичным образом как в режиме "КОНТРОЛЬ Ra".
При работе в режиме "КОНТРОЛЬ Rиз" в исходном состоянии ключи Rиз в каждом коммутаторе 4.1.6…4.n.6 выбора режимов замыкаются все, ключи каждого блока 4.1.7…4.n.7 замкнуты на корпус, а все адреса контролируемой цепи в каждом из этих блоков коммутируются на шину 4.1.8…4.n.8, таким образом изолируя контролируемую цепь от корпуса и всех цепей объекта контроля, контролируя последовательно сопротивление изоляции всех цепей объекта контроля.
При контроле кабельно-жгутовых изделий вне борта автономного или другого любого объекта контроль параметров производится аналогично как в прототипе, при этом все функции управления процессами контроля и обработки информации обеспечивает блок 1 общего управления, а контрольно-измерительные операции может выполнять каждый из локальных контрольно-измерительных коммутаторов 4.1…4.n, на которые приходят адреса контролируемой цепи по алгоритму блока 1 общего управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ МОНТАЖА, ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ СЛОЖНЫХ УСТРОЙСТВ ЭЛЕКТРОАППАРАТУРЫ И ТОКОРАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2008 |
|
RU2377585C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ УПРАВЛЕНИЯ ИННОВАЦИОННЫМ РАЗВИТИЕМ ПРЕДПРИЯТИЯ В СФЕРЕ ДОБЫЧИ И ПЕРЕРАБОТКИ НЕФТИ | 2014 |
|
RU2573264C1 |
| Устройство для контроля цифровых печатных узлов | 1983 |
|
SU1179233A1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА МОНИТОРИНГА | 2017 |
|
RU2662726C1 |
| Автоматизированная система контроля электромонтажа и сопротивления изоляции жгутов | 1989 |
|
SU1704109A1 |
| КОМПЛЕКС КОНТРОЛЯ БОРТОВЫХ КАБЕЛЬНЫХ СЕТЕЙ | 2009 |
|
RU2436108C2 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 1997 |
|
RU2115165C1 |
| Система для контроля параметров | 1985 |
|
SU1255996A1 |
| Устройство для контроля параметров | 1986 |
|
SU1403074A1 |
| Устройство для проверки монтажа релейных схем | 1978 |
|
SU744615A1 |
Изобретение относится к контрольно-измерительной технике. Сущность заявленного технического решения заключается в том, что в системе содержится блок общего управления, блок сетевого информационного обмена, магистраль информационного обмена, распределенная сеть локальных контрольно-измерительных коммутаторов, причем выход - вход блока общего управления соединен с входом - выходом блока сетевого обмена, выход - вход которого соединен посредством магистрали информационного обмена с входами - выходами локальных контрольно-измерительных коммутаторов, отличающаяся тем, что в систему введены n локальных контрольно-измерительных коммутаторов, информационно и аппаратно объединенных в единую информационную сеть, каждый из которых содержит блок информационного обмена, блок управления и вычисления, блок управления коммутаторами, блок задатчика допустимых пределов параметров, блок контроля, измерения и сравнения, коммутатор режимов контроля, шину контроля и измерения, коммутатор точек входа - выхода, обеспечивающий коммутацию точек входа - выхода на шину контроля и измерения или на корпус автономного объекта, блок входных - выходных разъемов. Технический результат, достигаемый при реализации заявленного решения, заключается в расширение функциональных возможностей и реализации методики допускового контроля изменением схемы коммутации прототипа. 1 ил.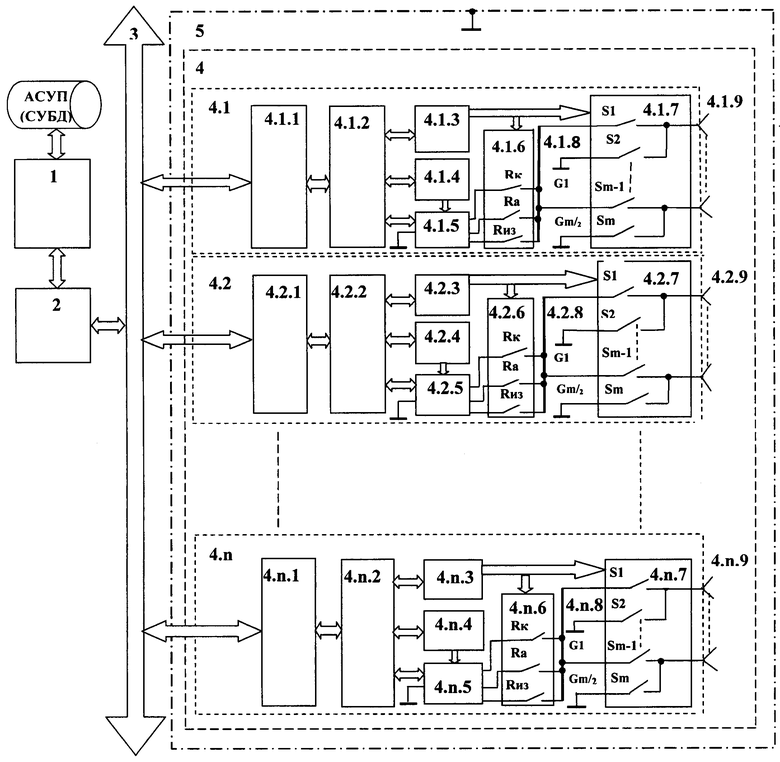
Автоматизированная система контроля параметров кабельно-жгутовых сетей автономных объектов, содержащая блок общего управления, блок сетевого информационного обмена, магистраль информационного обмена, распределенную сеть локальных контрольно-измерительных коммутаторов, причем выход-вход блока общего управления соединен с входом-выходом блока сетевого обмена, выход-вход которого соединен посредством магистрали информационного обмена с входами-выходами локальных контрольно-измерительных коммутаторов, отличающаяся тем, что в систему введены n локальных контрольно-измерительных коммутаторов, информационно и аппаратно объединенных в единую информационную сеть, каждый из которых содержит блок информационного обмена, блок управления и вычисления, блок управления коммутаторами, блок задатчика допустимых пределов параметров, блок контроля, измерения и сравнения, коммутатор режимов контроля, шину контроля и измерения, коммутатор точек входа-выхода для коммутации точек входа-выхода на шину контроля и измерения или на корпус автономного объекта, входные-выходные разъемы, причем первый вход-выход блока общего управления соединен информационным каналом с автоматизированной системой управления предприятием или базой данных, второй выход-вход соединен с входом-выходом блока сетевого обмена, который вторым выходом-входом соединен магистралью информационного обмена с входами-выходами блоков информационного обмена каждого локального контрольно-измерительного коммутатора, выходы-входы которых соединены с входом-выходом блока управления и вычисления, выходы-входы которых через внутреннюю магистраль информационного обмена соединены с входами-выходами блока управления коммутаторами, блока задатчика допустимых пределов параметров, блока контроля, измерения и сравнения, выходы последнего соединены с входами коммутатора выбора режимов контроля, а его выходы соединены с контрольно-измерительной шиной, являющейся входами нечетных m ключей коммутатора точек входа-выхода, а выходы нечетных m ключей соединены с контактами выходных разъемов и выходами четных ключей, входы которых соединены с корпусом автономного объекта и входом блока контроля, измерения и сравнения, а блок задатчика допустимых пределов параметров соединен вторым выходом со вторым входом блока контроля, измерения и сравнения.
| ЖАРОСТОЙКАЯ СТАЛЬ | 0 |
|
SU158297A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ МОНТАЖА, ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ И ДИАГНОСТИКИ НЕИСПРАВНОСТЕЙ СЛОЖНЫХ УСТРОЙСТВ ЭЛЕКТРОАППАРАТУРЫ И ТОКОРАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ | 2008 |
|
RU2377585C1 |
| Статья: "МИКРОПРОЦЕССОРНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ АВИОНИКИ - МАСКА", В.А., 09.09.2014 | |||
| US 0006820225 B1, 16.11.2004 | |||
| Статья: "СИСТЕМНЫЙ АНАЛИЗ, ОПТИМИЗАЦИЯ СТРУКТУРЫ И ТЕХНОЛОГИИ ПРОЦЕССОВ КОНТРОЛЯ И ДИАГНОСТИКИ БОРТОВЫХ КАБЕЛЬНЫХ СЕТЕЙ АВТОНОМНЫХ ОБЪЕКТОВ", 10.06.2016. | |||

