[0001] Настоящие варианты осуществления относятся к каскадным многоуровневым инверторам. В частности, варианты осуществления относятся к операции шунтирования неисправностей таких инверторов.
[0002] Каскадные многоуровневые инверторы используются в промышленных системах управления. Например, каскадные многоуровневые инверторы используются для управления моторными приводами среднего напряжения (например, моторными приводами на 4,1 кВ - 13,8 кВ) и/или компенсаторами статического напряжения.
[0003] Каскадные многоуровневые инверторы являются модульными. Инвертор высокой мощности выполняется из ряда меньших, соединенных последовательно однофазных инверторов или модулей. Любое число (например, 3-8) секций (ячеек) может быть использовано для данной ветви трехфазной системы. Когда одна или более из этих секций выходят из строя, инвертор может по-прежнему работать и формировать сбалансированные межфазные напряжения путем вычисления различных опорных напряжений. Хотя максимальное межфазное напряжение при шунтировании неисправностей меньше, чем в нормальных условиях, продолжение работы при сниженном уровне мощности может быть предпочтительнее полной остановки.
[0004] Для обеспечения баланса каждая ветвь может приводиться в действие с одинаковым числом секций. Если некоторое число секций выходит из строя в одной ветви, другие ветви могут шунтировать соответствующее число секций. Однако этот подход не обеспечивает максимального доступного напряжения для двигателя, так как не все доступные элементы используются. В другом подходе механизм обратной связи используется для генерации опорных напряжений. Однако точность этого метода зависит от коэффициента усиления обратной связи, который должен быть достаточно высоким для получения хороших результатов. Такой подход делает это более сложным, когда выходная частота каскадного многоуровневого инвертора является высокой, так как коэффициент усиления не может быть увеличен вне определенных пределов.
Сущность изобретения
[0005] В качестве введения предпочтительные варианты осуществления, описанные ниже, включают в себя способы, системы, инструкции, считываемые компьютером носители и цифровые электронные схемы для управления при шунтировании неисправностей каскадного многоуровневого инвертора. Опорные напряжения формируются как аналитическое решение, основанное на количестве работающих или активных секций.
[0006] В первом аспекте предоставлена система для управления шунтированием неисправностей каскадного многоуровневого инвертора. Первое множество первой ветви секций инвертора соединяется последовательно для первой фазы. Второе множество второй ветви секций инвертора соединяется последовательно для второй фазы. Третье множество третьей ветви секций инвертора соединяется последовательно для третьей фазы. Шунтирование неисправностей приводит к другому количеству секций инвертора в первом множестве, чем количество секций инвертора во втором множестве, являющихся активными. Процессор сконфигурирован, чтобы генерировать опорные напряжения без обратной связи для таких активных секций первой, второй и третьей ветвей инвертора. Все из активных первых секций инвертора работают с первым общим одним из опорных напряжений, все из активных вторых секций инвертора работают со вторым общим одним из опорных напряжений, и все из активных третьих секций инвертора работают с третьим общим одним из опорных напряжений.
[0007] Во втором аспекте обеспечивается способ для управления шунтированием неисправностей каскадного многоуровневого инвертора. Каскадный многоуровневый инвертор работает при шунтировании неисправностей. Первая ветвь идентифицируется как имеющая меньше работающих секций многоуровневого инвертора, чем вторая ветвь многоуровневого инвертора, во время работы. Работа секций второй ветви управляется как функция числа работающих секций первой ветви.
[0008] В третьем аспекте обеспечивается система для управления шунтированием неисправностей каскадного многоуровневого инвертора. Предусмотрены первая, вторая и третья ветви каскадного многоуровневого инвертора. По меньшей мере третья ветвь имеет меньшее число работающих секций, чем число второй ветви и число третьей ветви. Процессор сконфигурирован для управления широтно-импульсной модуляцией секций первой, второй и третьей ветви как функции первого, второго и третьего опорных напряжений соответственно. Каждое из первого, второго и третьего опорных напряжений включают в себя компонент для сбалансированного числа секций в первой, второй и третьей ветви, а второе и третье опорные напряжения включают в себя компонент для разности между числом первой ветви и числом второй ветви без разности между числом первой ветви и числом второй ветви или числом третьей ветви.
[0009] Настоящее изобретение определяется нижеследующей формулой изобретения, и ничто в данном разделе не следует рассматривать как ограничение этой формулы изобретения. Другие аспекты и преимущества настоящего изобретения описаны ниже в связи с предпочтительными вариантами осуществления и могут быть заявлены позже независимо или в комбинации.
Краткое описание чертежей
[0010] Компоненты и чертежи не обязательно выполнены в масштабе, упор вместо этого сделан на иллюстрировании принципов изобретения. Кроме того, на чертежах, одинаковые ссылочные позиции обозначают соответствующие части на всех различных видах.
[0011] Фиг. 1 - блок-схема одного варианта осуществления системы для управления шунтированием неисправности каскадного многоуровневого инвертора;
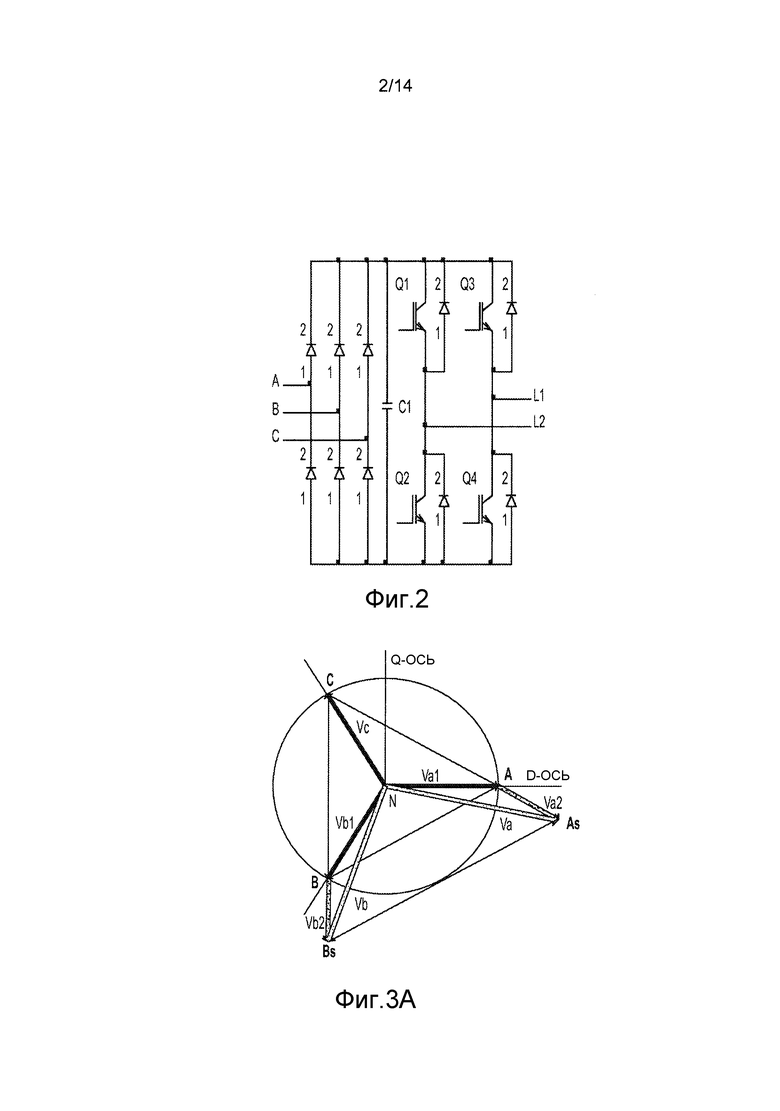
[0012] Фиг. 2 - принципиальная схема одного варианта осуществления секции для каскадного многоуровневого инвертора;
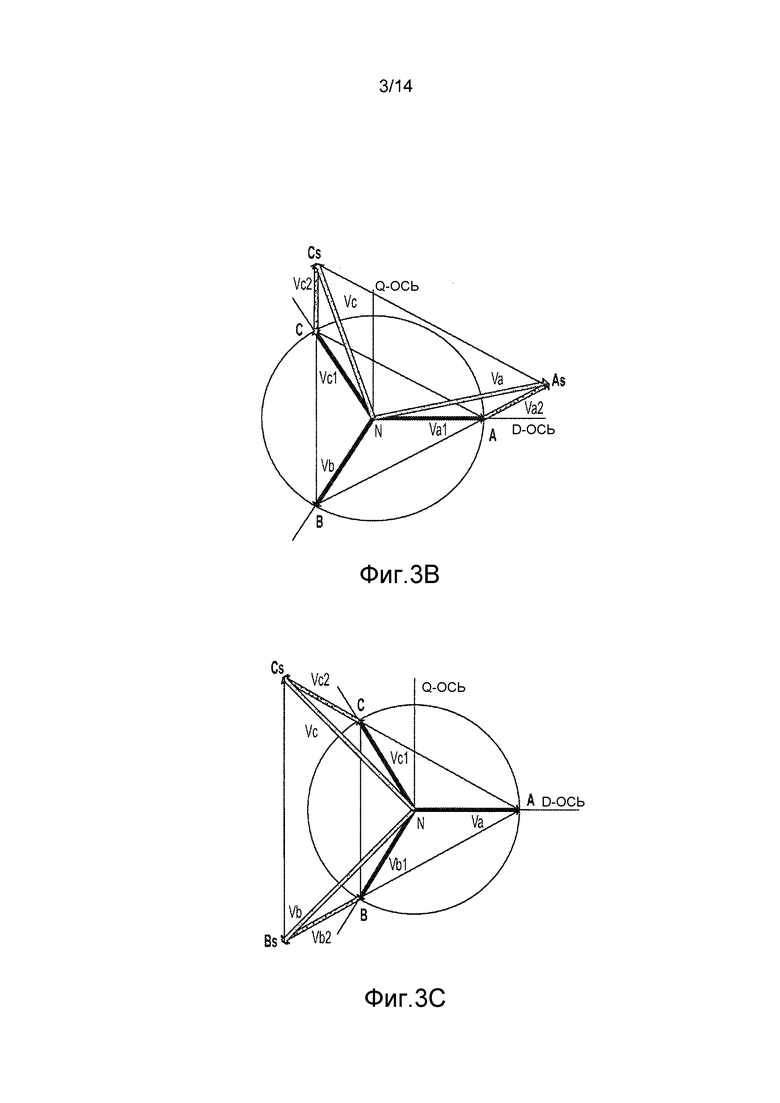
[0013] Фиг. 3а-с - графические представления сбалансированного межфазного напряжения в ситуациях с разными шунтированными секциями в различных фазах;
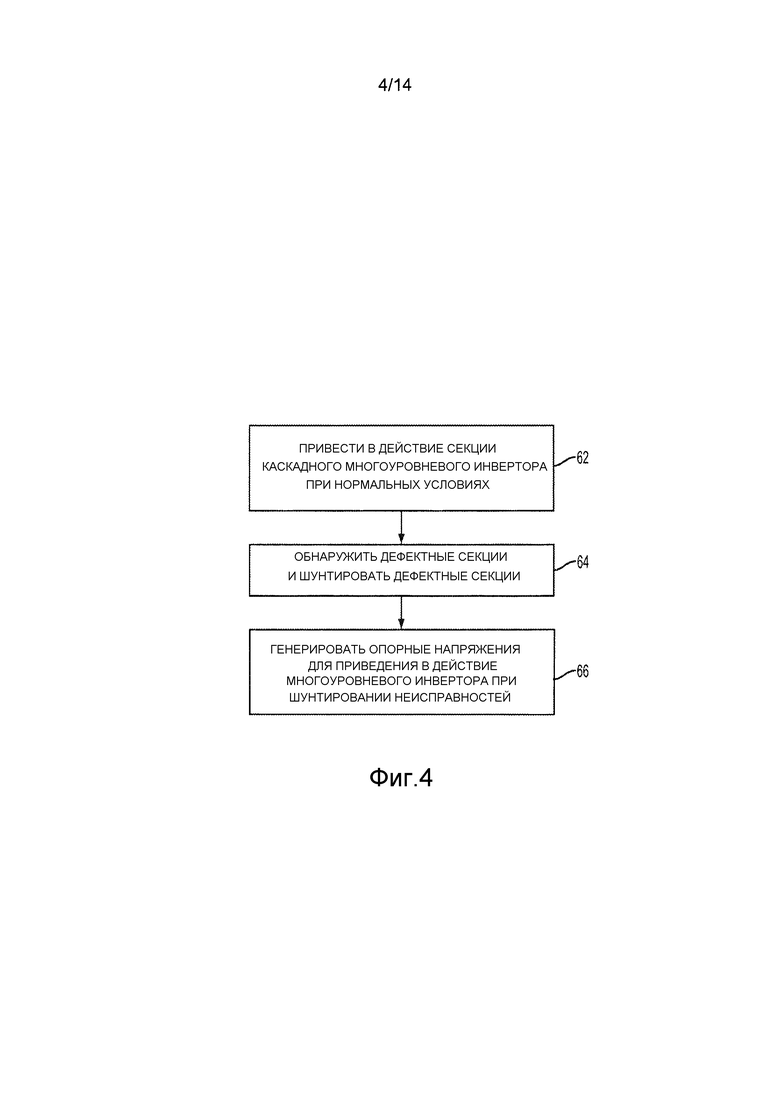
[0014] Фиг. 4 - блок-схема последовательности операций одного варианта осуществления способа для управления шунтированием неисправностей каскадного многоуровневого инвертора;
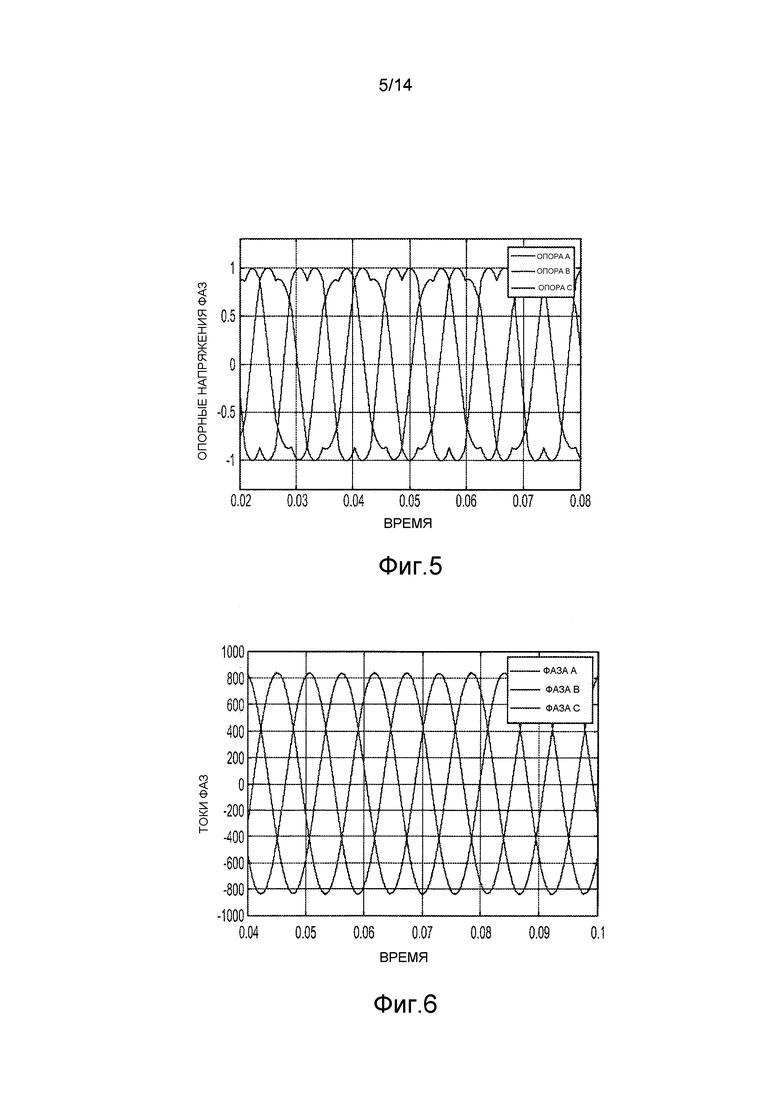
[0015] Фиг. 5 - примерное моделирование опорных напряжений фаз с одной шунтированной секцией в фазе;
[0016] Фиг. 6 - примерное моделирование токов фаз с одной шунтированной секцией в фазе;
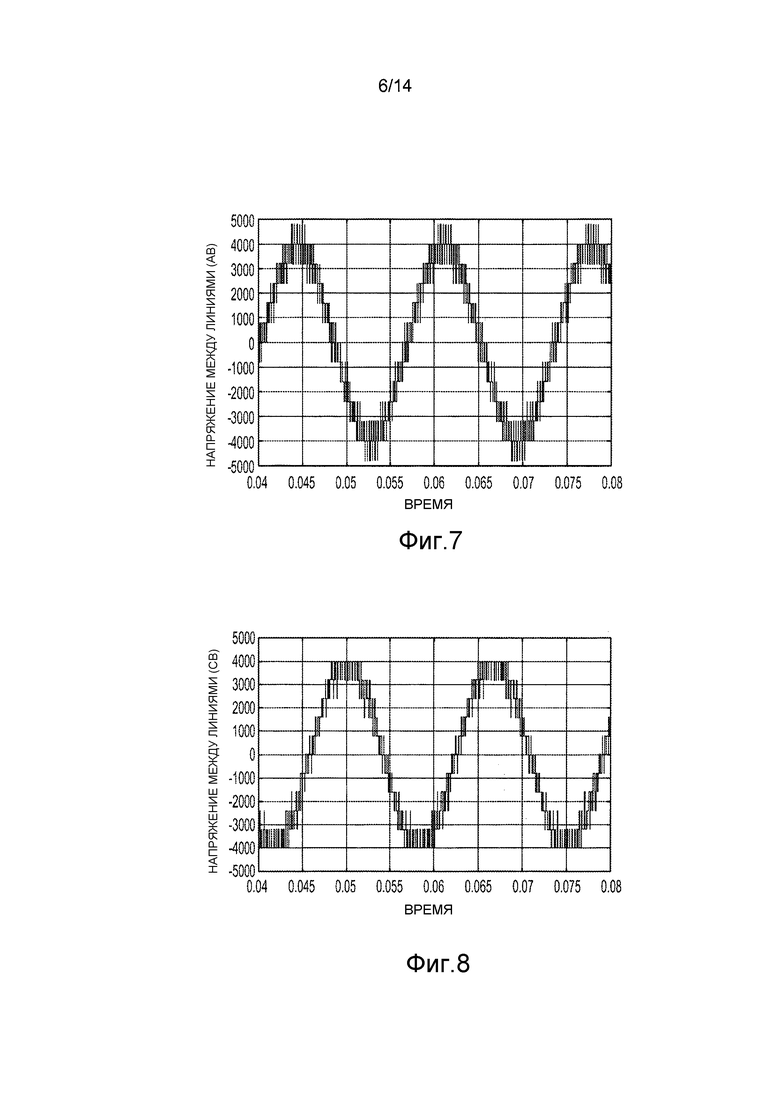
[0017] Фиг. 7 - примерное моделирование межфазного напряжения между фазами А и В с одной шунтированной секцией в фазе С;
[0018] Фиг. 8 - примерное моделирование межфазного напряжения между фазами В и С с одной шунтированной секцией в фазе С;
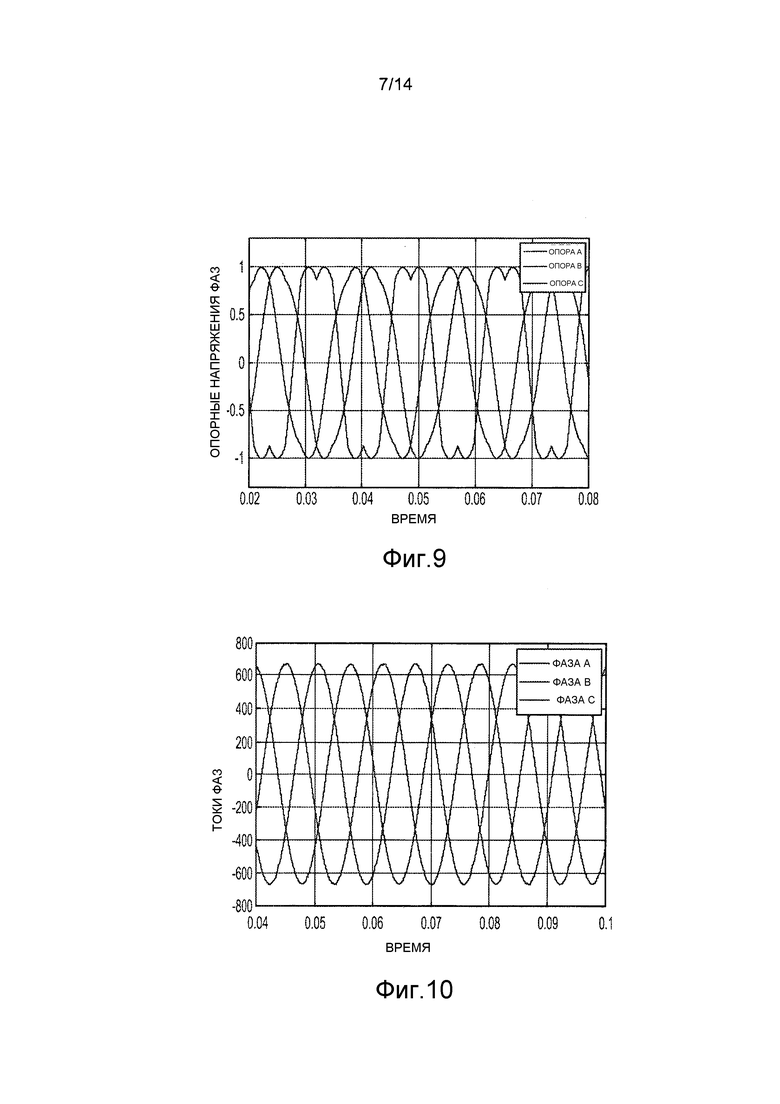
[0019] Фиг. 9 - примерное моделирование опорных напряжений фаз с двумя шунтированными секциями в фазе;
[0020] Фиг. 10 - примерное моделирование токов фаз с двумя шунтированными секциями в фазе;
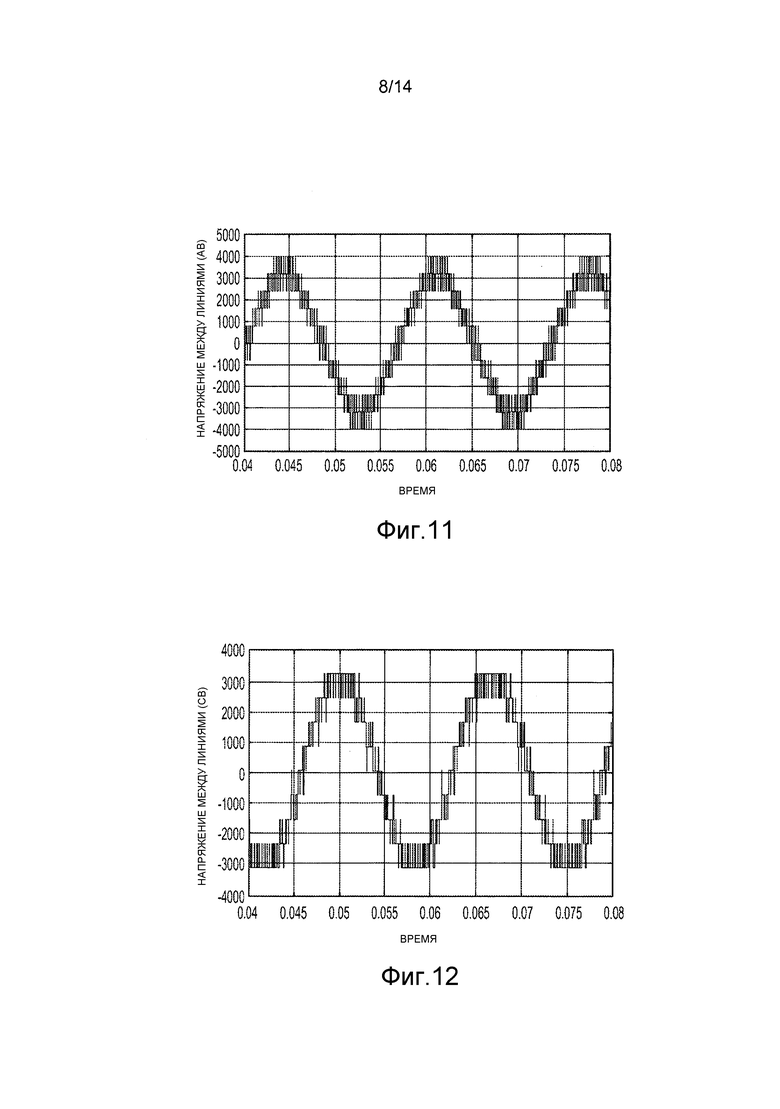
[0021] Фиг. 11 - примерное моделирование межфазного напряжения между фазами А и В с двумя шунтированными секциями в фазе С;
[0022] Фиг. 12 - примерное моделирование межфазного напряжения между фазами В и С с двумя шунтированными секциями в фазе С;
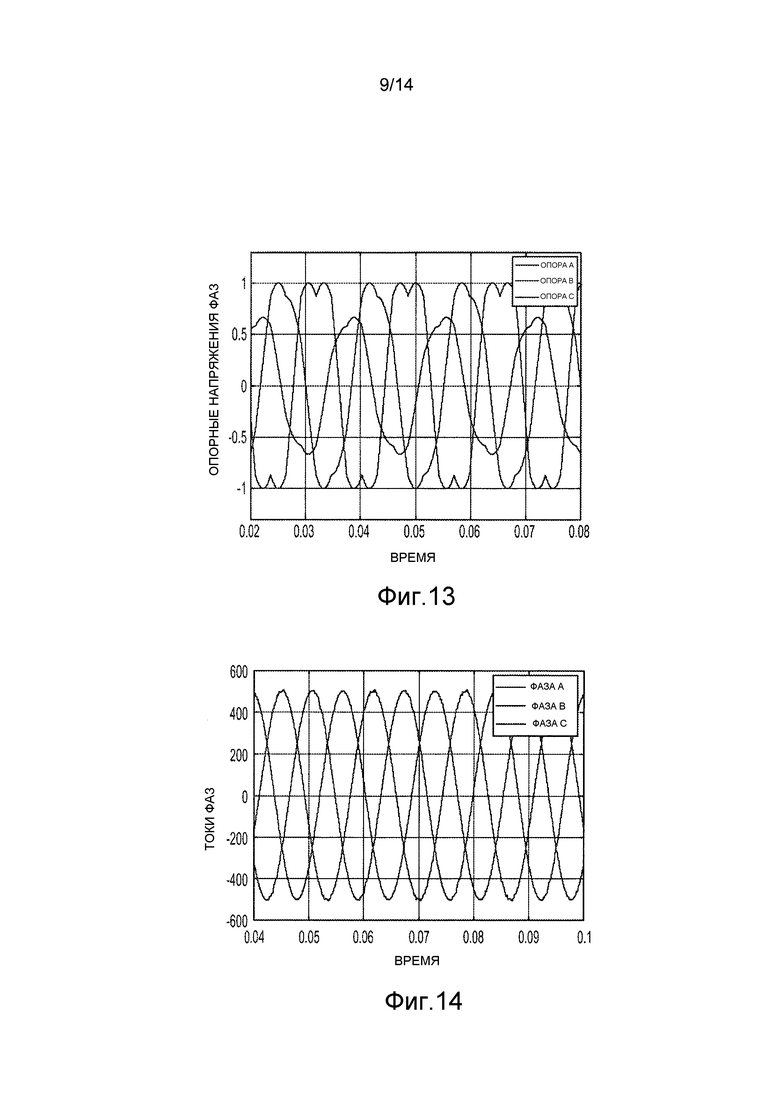
[0023] Фиг. 13 - примерное моделирование опорных напряжений фаз с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе В;
[0024] Фиг. 14 - примерное моделирование токов фаз с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе В;
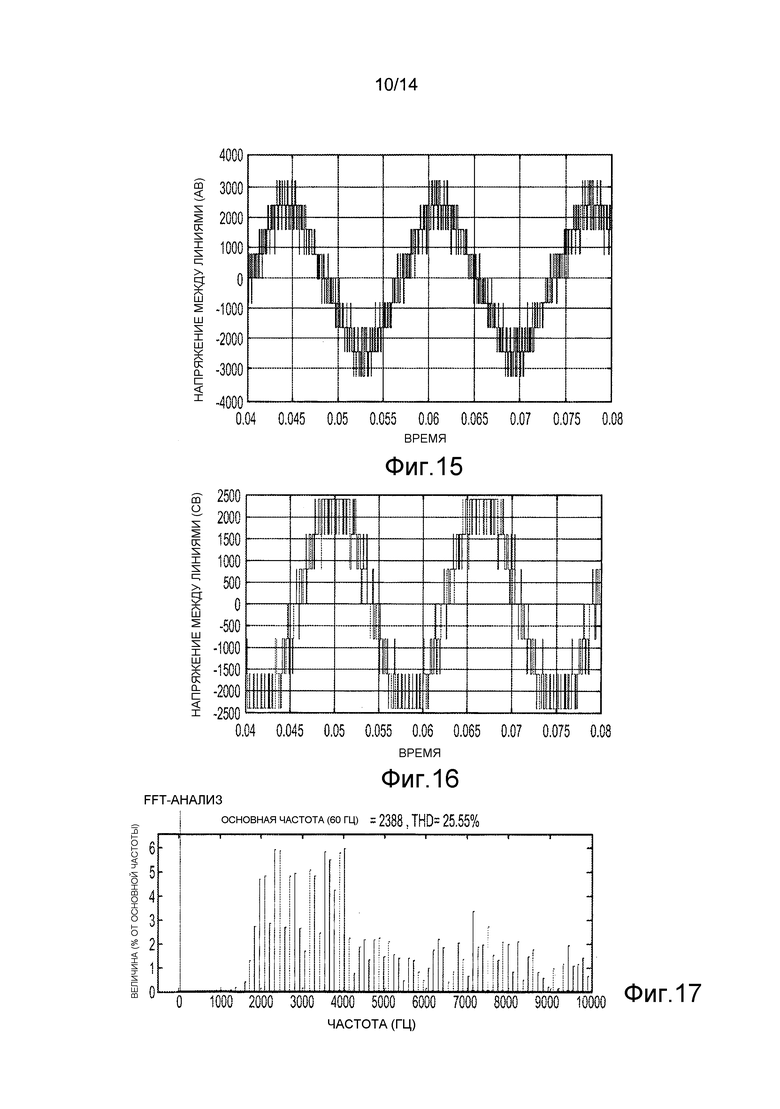
[0025] Фиг. 15 - примерное моделирование межфазного напряжения между фазами А и В с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе В;
[0026] Фиг. 16 - примерное моделирование межфазного напряжения между фазами В и С с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе В;
[0027] Фиг. 17 - спектр межфазного напряжения между фазами А и В в примере с двумя шунтированными секциями в фазе C и одной шунтированной секцией в фазе B;
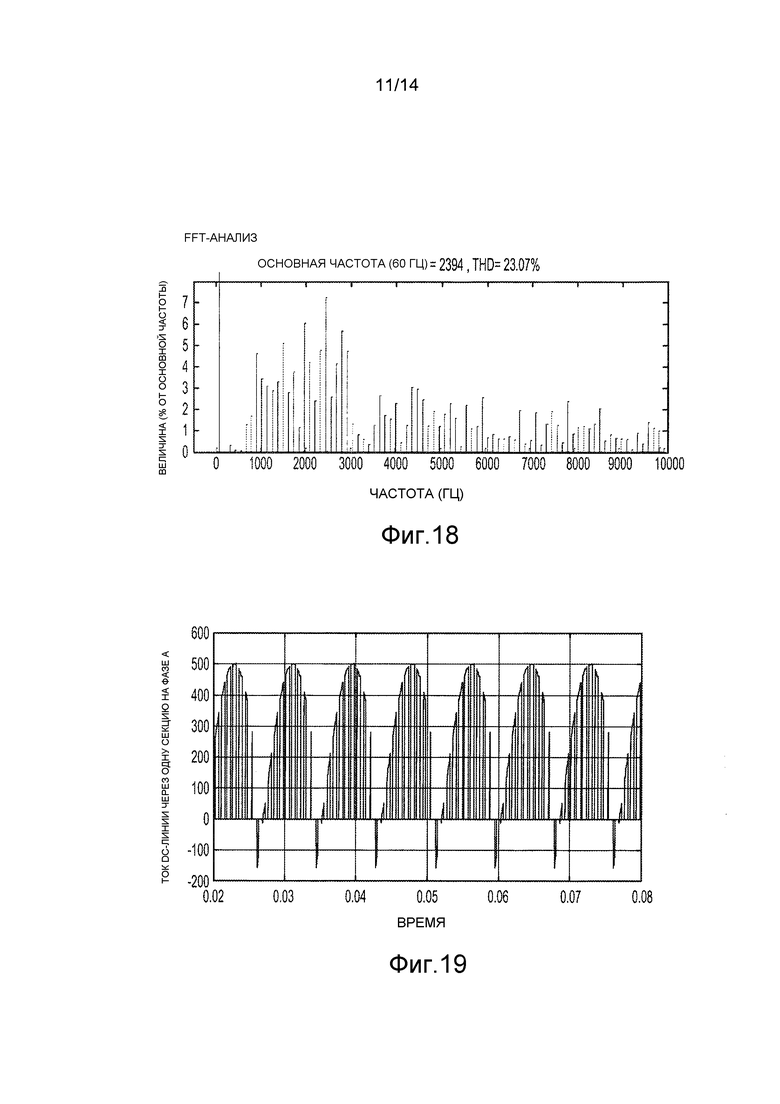
[0028] Фиг. 18 - спектр межфазного напряжения между фазами В и С в примере с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе B;
[0029] Фиг. 19 - моделированный ток линии постоянного тока (DC) через одну секцию фазы А с двумя шунтированными секциями в фазе С и одной шунтированной секцией в фазе В;
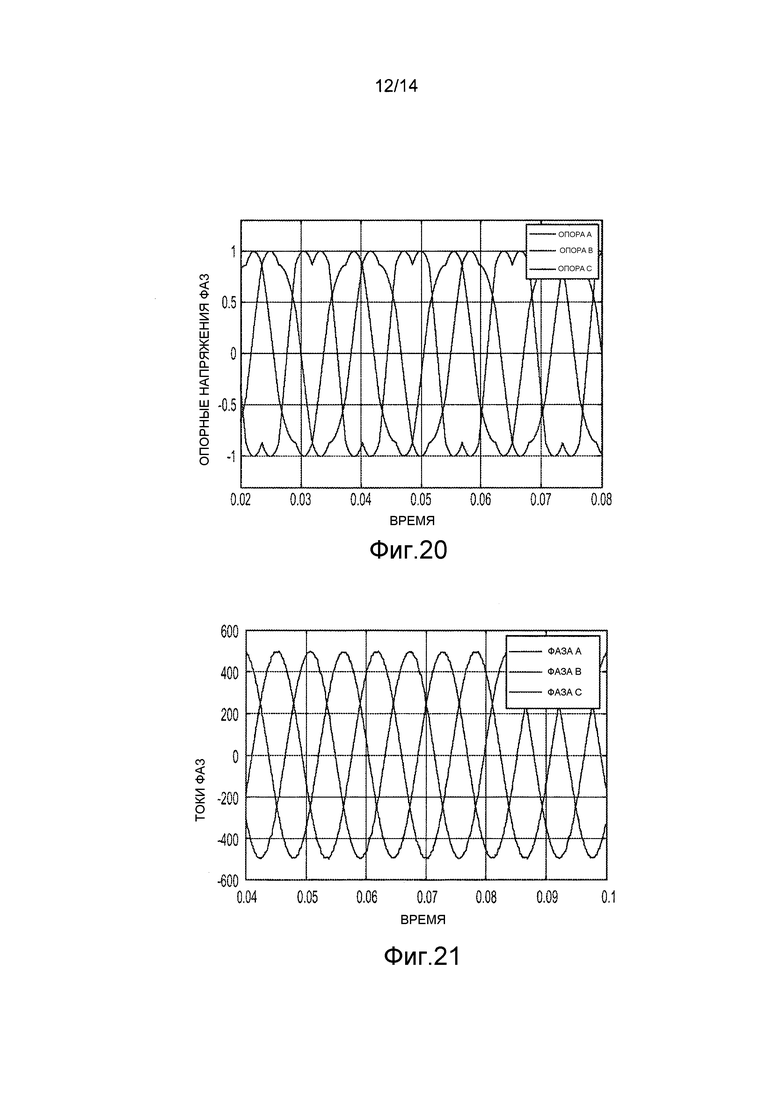
[0030] Фиг. 20 - примерное моделирование опорных напряжений фаз с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В;
[0031] Фиг. 21 - примерное моделирование токов фаз с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В;
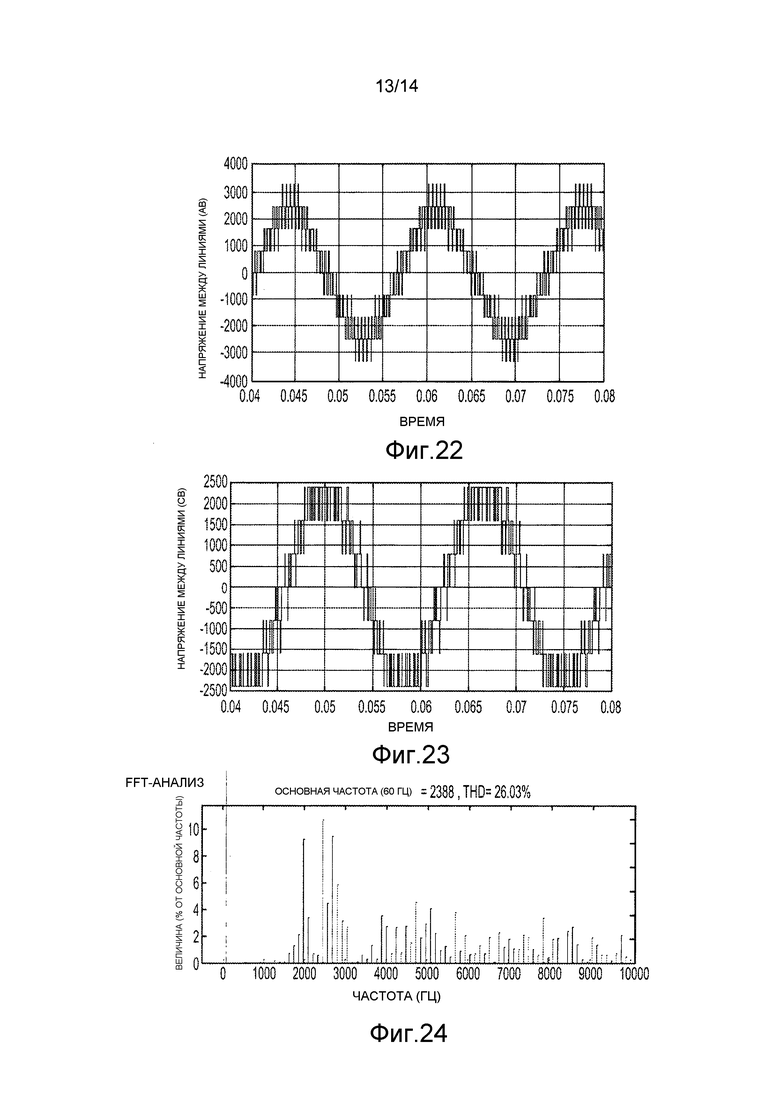
[0032] Фиг. 22 - примерное моделирование межфазного напряжения между фазами А и В с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В;
[0033] Фиг. 23 - примерное моделирование межфазного напряжения между фазами В и С с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В;
[0034] Фиг. 24 - спектр межфазного напряжения между фазами А и В в примере с двумя шунтированными секциями в фазе C и одной шунтированной секцией в каждой из фаз А и В;
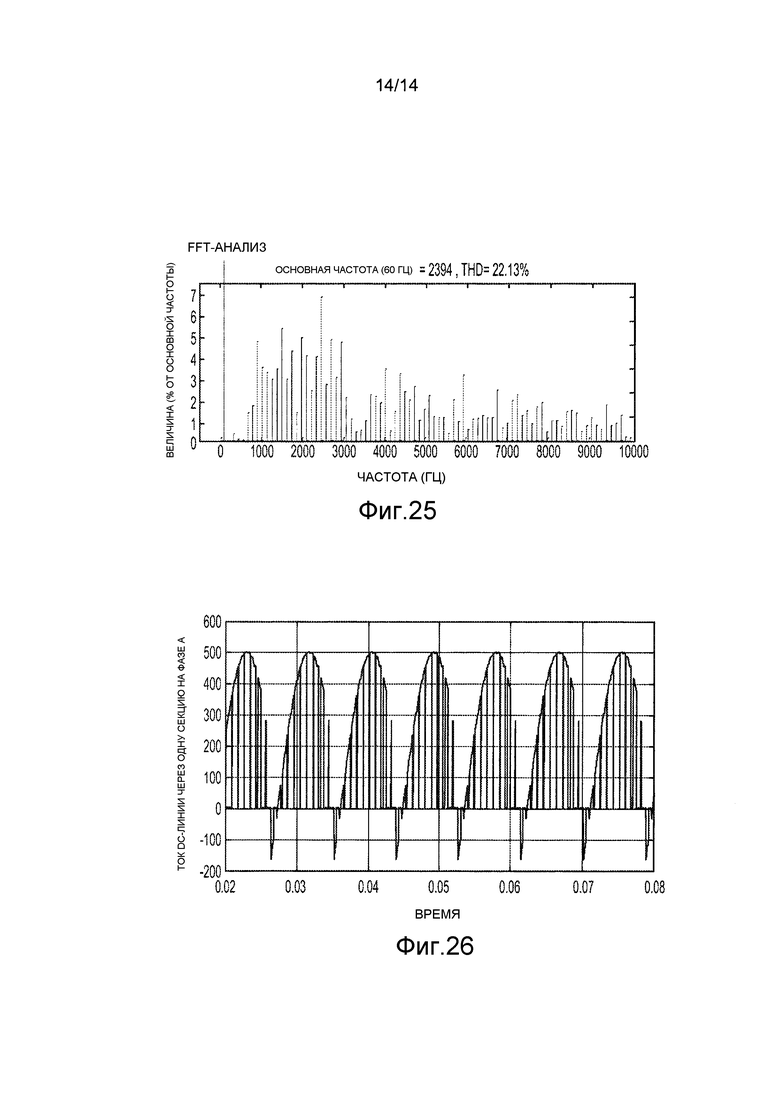
[0035] Фиг. 25 - спектр межфазного напряжения между фазами В и С в примере с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В; и
[0036] Фиг. 26 - моделированный ток DC-линии через одну секцию фазы А с двумя шунтированными секциями в фазе С и одной шунтированной секцией в каждой из фаз А и В.
Подробное описание чертежей и предпочтительных в настоящее время вариантов осуществления
[0037] Опорные напряжения для каскадного многоуровневого привода при шунтировании неисправности генерируются аналитически. По сравнению с другими подходами этот подход определяет точные значения из математических формул для опорных напряжений фаз, чтобы получить максимально возможное выходное межфазное напряжение. Этот подход не основывается на какой-либо аппроксимации или контуре обратной связи.
[0038] Каскадный многоуровневый инвертор является трехфазным устройством. Трехфазная система моделируется в условиях операции шунтирования, когда одна или более секций в одной или более ветвей фаз не работают, но каждая ветвь по-прежнему включает в себя работоспособные секции.
[0039] Трехфазная система имеет ветви, обозначенные как А, В и C (то есть ориентация ABC). Напряжение, выводимое каждой ветвью, приведено в уравнениях (1)-(3):
Когда все секции активны или участвуют в генерации трехфазной системы, опорные напряжения, используемые для управления каждой секцией, записываются в виде уравнений (4)-(6):
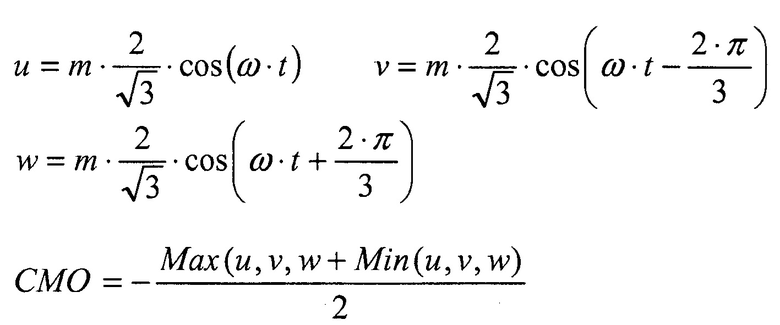
где m - индекс модуляции для широтно-импульсной модуляции и может иметь любое значение от 0 до 1, ω - частота, t - время и CMO - сдвиг общего режима. Член 

[0040] Когда определенное число секций шунтируется из-за неисправности, привод не может обеспечивать равные напряжения в каждой фазе. Чтобы поддерживать равные межфазные напряжения и тем самым добиться сбалансированных токов фаз, амплитуда и фазовый сдвиг для одного или более напряжений фаз корректируются относительно их нормальных значений. Чтобы добиться этого, опорные напряжения корректируется соответствующим образом для каждой ветви.
[0041] Если предположить, что число активных секций на каждой фазе во время операции шунтирования равно Nа, Nb и Nс соответственно, фазные напряжения на единицу, генерируемые приводом во время операции шунтирования неисправностей, записываются в общем виде следующим образом:

В уравнениях (8)-(10), сдвиг общего режима (СМО) больше не предполагается таким, как показано в уравнении (7), в то время как m1 - максимальный индекс модуляции, при операции шунтирования.
[0042] При этом амплитуды межфазных напряжений записываются как:
[0043] Из уравнений (14) и (16), две неизвестных ϕ1 и ϕ2 могут быть определены для поддержания всех трех межфазных напряжений равными:
[0044] Из уравнений (17) и (18), два угловых смещения теоретически могут быть определены, но получение аналитической формы невозможно. Кроме того, такой подход не может определить выражение для сдвига общего режима в уравнениях (8) - (10), необходимых для того, чтобы получить максимальное межфазное напряжение. В результате, двигатель будет работать, но не сможет обеспечить максимальную скорость, мощность и/или крутящий момент.
[0045] Другой подход заключается в разбиении трехфазной системы на две системы: одну, которая является сбалансированной по количеству секций в каждой ветви, которая может работать как любая нормальная трехфазная система, и вторую, которая работает с различными фазовыми сдвигами, чтобы поддерживать сбалансированные межфазные напряжения. Однако этот подход имеет недостаток, состоящий в наличии различных фазных опорных напряжений в секциях, принадлежащих к одной и той же фазе. Это означает, что при использовании сдвинутой по фазе ШИМ-модуляции генерируемая форма сигнала содержит дополнительные гармоники.
[0046] При использовании аналитического подхода, то же самое опорное напряжение может быть обеспечено для каждой работающей секции фазы. Идентичные опорные напряжения обеспечиваются для всех секций, принадлежащих к одной и той же фазе, таким образом, гарантируя, что использование стандартной сдвинутой по фазе ШИМ-модуляции не приводит к дополнительным гармоникам.
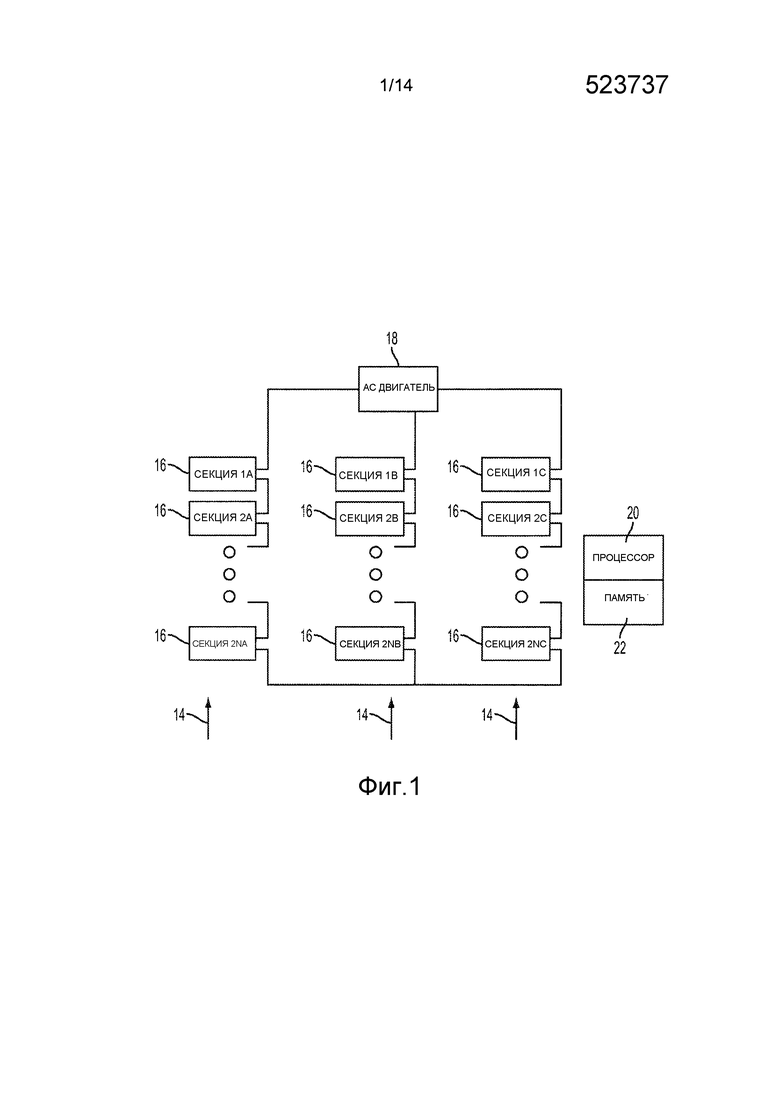
[0047] На Фиг. 1 показана система для управления шунтированием неисправностей в каскадном многоуровневом инверторе. В примере, показанном на Фиг. 1, система является каскадным многоуровневым моторным приводом среднего напряжения. Частотой и/или амплитудой напряжения управляют, чтобы приводить в действие двигатель 18 переменного тока (AC), например, для управления производственным процессом.
[0048] АС двигатель 18 является любым двигателем AC-типа: синхронным, асинхронным, с постоянным магнитом, и может быть рассчитан на низкое напряжение, среднее напряжение или высокое напряжение. Например, АС двигатели среднего напряжения могут работать в диапазоне от 4,1 кВ до 13,8 кВ. Большее или меньшее напряжение может быть использовано. Более одного АС двигателя может быть подключено. Другие нагрузки могут быть использованы вместо АС двигателя 18 или в дополнение к нему. AC двигатель 18 реагирует на напряжение, приложенное к многоуровневому инвертору на трех фазах, чтобы увеличивать, уменьшать или поддерживать постоянной скорость или положение.
[0049] Каскадный многоуровневый инвертор включает в себя три фазы или ветви 14, каждая из которых соединена с АС двигателем 18 и управляется процессором 20, работающим с памятью 22. Дополнительные, другие или меньшее число компонентов могут быть использованы. Другие управляющие структуры, иные, чем процессор 20 и память 22, могут быть использованы.
[0050] Каждая из ветвей 14 образована из множества секций 16. Любое число секций 16 может быть использовано в каждой ветви 14, например, 3-8 секций. В примере, показанном на Фиг. 1, каждая из трех ветвей 14 сформирована из одного и того же числа, N, секций 16. Другие инверторы, конфигурации соединения или их комбинации могут быть использованы.
[0051] Секции 16 являются однофазными инверторами. Инвертор высокой мощности для АС двигателя 18 состоит из каскада секций 16, соединенных последовательно в разных ветвях 14. Каждая секция 16 реагирует на сигналы управления для изменения уровня напряжения и/или выходной частоты, результатом чего является многоуровневая форма сигнала напряжения для каждой ветви 14.
[0052] Секции 16 включают в себя силовые полупроводниковые переключающие устройства, пассивные компоненты (индукторы, конденсаторы), схемы управления, процессоры, интерфейсы и другие компоненты для связи с процессором 20. Секции 16 работают на основе сигналов от процессора 20. Например, уровни мощности устанавливаются процессором 20. Схема управления или плата управления в секции 16 инвертора принимает опорное напряжение и генерирует стробирующие импульсы для силовых переключающих устройств, используя соответствующие векторные управляющие воздействия и широтно-импульсную модуляцию. В качестве альтернативы процессор 20 выдает стробирующие импульсы, предоставляемые в секции 16, на основе опорных напряжений.
[0053] На Фиг. 2 показана примерная принципиальная схема для одной из секций 16. Четыре биполярных транзистора Q1-4 с изолированным затвором соединяются в выходные группы линии один (L1) и линии два (L2). Диоды и конденсатор соединяются с трехфазным входным АС сигналом и параллельно транзисторам Q1-4. Транзисторы Q1-4 получают стробирующие входные сигналы, управляемые процессором 20 (Фиг. 1). Путем широтно-импульсной модуляции опорного напряжения, процессор 20 управляет каждой из секций 16 и, таким образом, напряжением и частотой выходного сигнала, который является напряжением между линиями L1 и L2. Другие схемы инвертора могут быть использованы с теми же или другими компонентами (например, транзисторами различных типов и/или в различном количестве). Другие схемы инвертора могут иметь дифференциальное выходное напряжение и могут быть соединены последовательно с выходным напряжением другого инвертора.
[0054] Как показано на Фиг. 1, одна или более из секций 16 может выйти из строя или работать некорректным образом. Чтобы продолжить работу каскадного многоуровневого инвертора, отказавшие или неработоспособные секции 16 шунтируются, например, путем соединения L1 и L2 вместе на Фиг. 2. Механический переключатель соединяется параллельно каждой из неработоспособных секций 16, позволяя шунтировать выбранную секцию 16. Механический переключатель активируется путем приложения напряжения постоянного тока (DC) или переменного тока (AC) к соленоиду в ответ на сигнал от процессора 20. Альтернативно, работоспособные транзисторы Q1-4 секции 16 используются для шунтирования. Например, Q1 и Q3 управляются, чтобы всегда быть включенными ("on"), чтобы шунтировать, или Q2 и Q4 управляются так, чтобы всегда быть "on", чтобы шунтировать. Другие механизмы шунтирования также могут быть использованы, например, электронное устройство используется вместо механического переключателя.
[0055] Шунтирование секции 16 в одной ветви 14 приводит к тому, что различное число активных секций 16 имеет место в различных ветвях 14. Например, ветви 14 трех фаз обозначены как A, B и C. В приведенном ниже описании число активных секций 16 в ветви А рано Na, число активных секций 16 в ветви B равно Nb, и число активных секций 16 в ветви C равно Nc. Если секция 16 выходит из строя в ветви С, то ветви А и В имеют большее число работоспособных секций 16. Секция 16 может выйти из строя в ветви B, в результате чего ветвь А имеет больше работоспособных секций 16, чем ветви В и С. Другая секция 16 может выйти из строя в ветви C, в результате чего ветвь С имеет меньше работоспособных секций 16, чем ветвь B, которая имеет меньше работоспособных секций 16, чем ветвь А. Любая комбинация различных чисел (например, Na=N, Nb=N, и Nc=N-2) работоспособных или отказавших секций 16 может обеспечиваться в разных ветвях 14. Операция шунтирования может продолжаться до тех пор, пока в одной или более ветвей 14 не останется недостаточное число секций 16, такое как меньше, чем пороговое число (например, меньше чем один или два).
[0056] Когда одна или более из секций 16 выходит из строя, инвертор может по-прежнему работать и вырабатывать сбалансированные межфазные напряжения с использованием других опорных напряжений по сравнению со случаем, когда все секции 16 доступны. Процессор 20 генерирует другие опорные напряжения для управления транзисторами Q1-4 активных секций 16. Хотя доступное максимальное межфазное напряжение, обеспечиваемое АС двигателю 18, меньше, чем в нормальных условиях (все секции работоспособные), во многих промышленных процессах предпочтительно продолжать работать при пониженном уровне мощности без полной остановки.
[0057] Процессор 20 является общим процессором, центральным процессорным блоком, управляющим процессором, цифровым сигнальным процессором, специализированной интегральной схемой, программируемой пользователем вентильной матрицей, цифровой схемой, аналоговой схемой, их комбинацией или другим известным в настоящее время или позднее разработанным устройством для управления секциями 16 инвертора. Процессор 20 является одним устройством или несколькими устройствами, работающими последовательно, параллельно или отдельно. Процессор 20 может быть основным процессором компьютера или может быть процессором для обработки некоторых задач в более крупной системе, таким как контроллер в приборной панели или программируемый логический контроллер.
[0058] Процессор 20 сконфигурирован инструкциями, схемой, аппаратными средствами и/или программным обеспечением, чтобы иметь возможность выполнять действия, описанные в данном документе. Например, процессор 20 сконфигурирован, чтобы генерировать опорные напряжения путем доступа к справочной таблице в памяти 22 посредством комбинации работоспособных или шунтированных секций 16 на каждую ветвь 14. Справочная таблица обеспечивает аналитическое решение в виде сохраненных опорных напряжений для соответствующей ситуации шунтирования. В других вариантах осуществления процессор 20 выполняет одно или более вычислений, чтобы получать аналитическое решение для опорных напряжений по мере необходимости.
[0059] Процессор 20 генерирует управляющие опорные напряжения или сигналы, необходимые для управления секциями 16 инвертора. Опорные напряжения генерируются для активных секций из секций 16 инвертора. Опорные напряжения не формируются для шунтированных или неактивных секций 16.
[0060] Опорное напряжение сравнивается с треугольным колебанием. Результат сравнения является сигналом широтно-импульсной модуляции, который усиливается схемой вентиля-формирователя и затем прикладывается к каждому IGBT Q1-Q4 секции 16. Если опорное напряжение выше, чем треугольная форма сигнала, Q1 включается. Когда опорное напряжение ниже, чем треугольная форма сигнала, Q1 выключается. Q1 и Q2 всегда включаются в обратном порядке: когда включен один, другой выключен, и наоборот. Аналогичная операция выполняется для Q3 и Q4, с той разницей, что треугольная форма сигнала используется в противофазе по отношению к треугольной форме сигнала, используемой для Q1 и Q2. Модуляция импульсного колебания реагирует на опорное напряжение. Управление опорным напряжением управляет работой транзисторов Q1-4 активных секций 16. Процессор 20 выполняет сравнение. Альтернативно, схема секций 16 выполняет сравнение.
[0061] Одно опорное напряжение генерируется для каждой из ветвей 14. Например, все работоспособные секции 16 данной ветви 14 работают с использованием того же опорного напряжения, но разные опорные напряжения подаются на различные ветви 14. Широтно-импульсная модуляция одной ветви 14 отличается от таковой для другой ветви 14.
[0062] Процессор 20 сконфигурирован, чтобы генерировать опорные напряжения для секций 16 ветвей 14 таким образом, что равное по величине напряжение обеспечивается между каждыми двумя фазами, поэтому сбалансированное трехфазное межфазное напряжение прикладывается к двигателю. Опорные напряжения изменяются или управляются, чтобы обеспечить требуемое напряжение, частоту и фазовое отношение для управления АС двигателем 18. Другие ограничения по напряжению, частоте и/или фазе могут быть использованы, в зависимости от работы АС двигателя 18 или другой нагрузки.
[0063] Процессор 20 сконфигурирован, чтобы генерировать опорные напряжения на основе числа доступных секций на каждой ветви. Согласно уравнениям (19)-(21), три числа, определяемые как Min, Mid и Мax представляют собой минимальное, среднее и максимальное число доступных секций на фазу соответственно, когда каскадный многоуровневый инвертор вошел в режим шунтирования:
[0064] Следующие матричные записи представляют первоначальную структуру инвертора (нормальную), имеющего N секций на каждую фазу, и инвертор, работающий в режиме шунтирования, имеющий Na, Nb и Nc секций на каждую фазу соответственно:
[0065] В одном примере, наибольшее число шунтированных секций 16 назначено ветви С, среднее число - секции B и наименьшее число - ветви А. Это представлено как:

Различные ветви могут быть связаны с минимальным, средним или максимальным числом активных секций 16.
[0066] Следуя предположению согласно уравнению (23), инвертор в режиме шунтирования может быть представлен в виде:

Из уравнения (25), инвертор в режиме шунтирования может рассматриваться как комбинация трех инверторов, I1, I2 и I3. Первый компонент I1 соответствует обычному инвертору, управляемому со сбалансированным набором опорных напряжений. Равное число секций 16 обеспечено в каждой ветви для этого первого набора секций или инвертора I1. Известный сдвиг общего режима может быть применен к опорному напряжению первого компонента или набора I1 для увеличения индекса модуляции. Второй набор секций или инвертор I2 соответствует инвертору, в котором только две фазы могут быть модулированы. Третий набор секций 16 или инвертор I3 соответствует инвертору, где только одна фаза может быть модулирована.
[0067] Для аналитического решения, процессор 20 генерирует опорные напряжения на основе чисел активных секций 16 инвертора из ветвей с минимальным и средним числами активных секций 16. Третий компонент, I3, не может внести никакого вклада в максимально достижимое межфазное напряжение, но может влиять на спектр гармоник. Аналитическое решение может использовать первый и второй наборы секций, I1 и I2, и не использовать третий набор I3 для генерации опорных напряжений. Максимальное межфазное напряжение фаз использует первый и второй компоненты (I1 и I2) и соответствующие минимальное и среднее числа, но не максимальный член, который встречается только в третьем компоненте, I3. Максимальное межфазное напряжение всего инвертора является суммой напряжений из ветвей С и В активных секций инвертора. Опорные напряжения для каждой ветви включают в себя члены для сбалансированного числа секций и член для двух ветвей, основанный на разности между средним и минимальным числом секций 16, но не на максимальном числе секций 16 (или соответствующей разности относительно максимального числа).
[0068] Фиг. 3А-С показывают, как получается трехфазная, сбалансированная между фазами система, когда число минимально работающих секций имеется на фазах C, B и A соответственно. Так как обозначения А, В и С фаз или ветвей назначены произвольно, процедура аналогична для всех ситуаций. Соответственно, объяснение, приведенное ниже, относится к Фиг. 3А, что соответствует предположению согласно уравнению (24). Полученные результаты могут быть распространены на ситуации, соответствующие Фиг. 3В и С.
[0069] На Фиг. 3А, инвертор I1 из разложения уравнения (25) рассматривается как сформированный векторами Va1, Vb1 и Vc. Va1, Vb1 и Vc представляют собой сбалансированный инвертор, имеющий минимальное число секций 16 на фазу. Таким образом, все доступные секции на фазе C используются, но имеется больше секций, доступных на фазах А и В. Чтобы поддерживать сбалансированное межфазное напряжение, остальные секции на этих двух фазах могут быть использованы таким образом, что вектор, полученный посредством дополнительной разности между средним и минимальным числами (Mid-Min) секций 16 в фазе А, Va2, совмещается с вектором CA, сформированным посредством инвертора I1, в то же время вектор, полученный посредством дополнительной разности между средним и минимальным числами (Mid-Min) секций в фазе В, Vb2, совмещается с вектором СВ, сформированным посредством инвертора I1. Эта векторная система Va2 и Vb2 является вторым членом в уравнении (25). Из геометрии, треугольник ASBSC все еще является равносторонним, так же, как ABC, это означает, что межфазная система, сформированная таким образом, по-прежнему сбалансирована. По существу, число (Min) секций имеют нормальные опорные напряжения сбалансированной системы, как задано уравнениями (4)-(7), тогда как секции разности между средним и минимальным числом (Mid-Min) секций имеют опорные значения, как указано ниже уравнениями (26) и (27):
[0070] Кроме того, из Фиг. 3А, сформированное максимальное межфазное напряжение записывается в виде суммы межфазного напряжения инвертора I1 плюс напряжение, сформированное инвертором I2:

Напомним, что инвертор I1 является сбалансированной системой. Стандартный СМО добавляется, как выражено в уравнениях (4)-(7), и с максимальным индексом модуляции 
 с учетом уравнений (11)-(13) следует, что в расчете на единицу:
с учетом уравнений (11)-(13) следует, что в расчете на единицу:

[0071] Поскольку существуют Nb-Nс (Mid-Min) секций, к которым применяются опорные напряжения согласно уравнениям (26) и (27), и с максимальным индексом модуляции 1, максимальное напряжение, которое может быть получено системой I2, определяется по формуле:

[0072] Из уравнений (28а)-(28b), максимальное в расчете на единицу межфазное напряжение при шунтировании равно:

[0073] Соотношение согласно уравнению (29) было выведено в предположении условий уравнения (24), что минимальное число секций находится в фазе С, а максимальное число секций - в фазе А. В более общем виде уравнение (29) переписывается так, что максимальное межфазное напряжение при операции шунтирования в расчете на единицу имеет вид:

Сравнивая общие выражения уравнений (14)-(16) с уравнением (30), можно видеть, что это аналитическое решение может достичь максимального межфазного напряжения при операции шунтирования.
[0074] Полученное до сих пор решение использует два различных набора форм сигналов для секций, которые принадлежат к одной и той же фазе. Число Nс (Min) секций 16 в каждой из трех фаз имеют опорные значения, приведенные в уравнениях (4)-(7), а число Nb-Nс (Mid-Min) 16 секций на двух фазах А и B имеют опорные значения, определяемые уравнениями (26)-(27), при допущениях согласно уравнению (24). Это представлено следующим образом:
 , для каждой из (Min) секций, т.е. 1 < i <(Min) (31), и
, для каждой из (Min) секций, т.е. 1 < i <(Min) (31), и
 , для каждой из (Mid-Min) секций, т.е. 1 < j <(Mid-Min) (32).
, для каждой из (Mid-Min) секций, т.е. 1 < j <(Mid-Min) (32).
[0075] Введение различных фазовых сдвигов, а также величин в секции 16 для одной и той же фазы оказывает отрицательное воздействие, когда используется способ сдвинутой по фазе ШИМ-модуляции. Использование различных опорных напряжений в управлении различными секциями, которые принадлежат одной фазе, вводит дополнительные гармоники в напряжение каждой фазы.
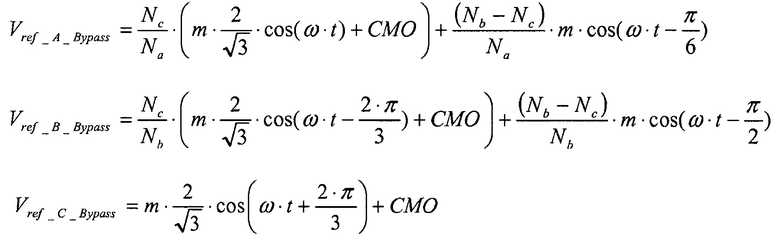
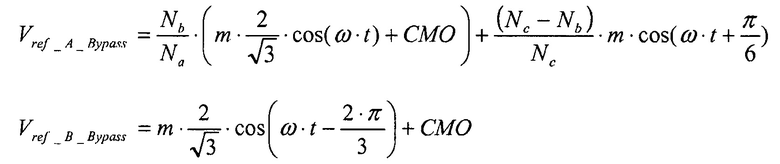
[0076] В предложенном аналитическом решении все секции 16, относящиеся к одной фазе, работают с одним и тем же опорным напряжением. Опорные напряжения для различных фаз разные, но все секции каждой фазы используют одно и то же опорное напряжение. Добавление уравнений (31) и (32) обеспечивает одно опорное напряжение, как если бы одна секция присутствовала в фазе А. Так как существует число Nb (Mid) секций 16 на фазу в ветви А, одно опорное напряжение усредняется всеми секциями следующим образом:

Аналогичным образом, опорное напряжение для всех секций 16 в фазе В записывается в виде:

Наконец, опорное напряжение в фазе С, ветви с наименьшим числом Nc работающих секций 16, остается неизменным. В результате уравнение (6) дает опорное напряжение:

[0077] Из уравнений (33) и (34), опорные напряжения для фаз А и В являются функциями от числа активных секций 16 в фазах С и В, но не фазы А (т.е. фазы с наибольшим числом активных секций 16). Опорные напряжения фаз А и В являются отношениями опорных напряжений из первого компонента I1 и второго компонента I2. Отношение для опорного напряжения из сбалансированного первого компонента равно Nс/Nb. Отношение для опорного напряжения из второго компонента равно (Nb-Nc)/Nb.
[0078] Поскольку фаза А имеет больше активных секций 16, то могут использоваться все или только достаточное число секций 16, чтобы быть равным среднему числу Nb секций 16. Когда все активные секции 16 инвертора фазы А используются, опорное напряжение равно:

где Na - число активных секций 16 инвертора в ветви А. Когда Na-Nb активных секций 16 инвертора ветви А не работают, опорное напряжение для активных секций 16 инвертора равно:

[0079] Опорные напряжения, полученные с уравнениями (33) и (34), не превосходят единицы. Секции 16 не вынуждаются работать в режиме перемодуляции. Перемодуляция не производится независимо от конфигурации шунтирования, как описано в следующем абзаце.
[0080] Если предположить, что Min/Mid = α, где 0 < α <1, два опорных напряжения (33) и (34) переписываются в виде:
Из определения α следует, что самые высокие амплитуды для опорных напряжений возникают, когда Min = Mid - 1, то есть когда только одна секция 16 шунтирована. При построении на графике Vref_A_Bypass при максимальном индексе модуляции для различных значений α, форма сигнала модуляции никогда не превышает единицы. Это предполагает, что на фазе с максимальным числом секций 16, число (Max-Mid) 16 исправных секций также шунтированы. Если, однако, все секции 16 используются на этой конкретной фазе, опорное напряжение будет меньше, с коэффициентом Mid/Max, так что график представляет собой сценарий наихудшего случая. Аналогичным образом, семейство графиков для Vref_В_Bypass при максимальной модуляции для различных значений α показывает, что формы сигналов модуляции никогда не превышают единицы. Не удивительно, что две формы сигнала представляются симметричными, как предполагается в векторном представлении, изображенном на Фиг. 3А-С.
[0081] Из уравнения (25), инвертор в режиме шунтирования разбивается на три фиктивных инвертора I1, I2 и I3, но весь проведенный анализ игнорировал последний компонент I3. Результат, полученный при игнорировании этого третьего компонента, однако, показал, что максимальное межфазное напряжение достигается без использования этого последнего компонента. Это физически объясняется тем фактом, что межфазное напряжение не может быть больше максимального напряжения, достижимого с помощью двух фаз с наименьшим числом секций. При допущениях согласно уравнению (24), дополнительные (Max-Mid) секций 16, которые доступны в одной фазе (например, А в данном случае) не могут вносить чего-либо большего в максимально доступное межфазное напряжение.
[0082] Выгода может быть получена, если все доступные переключатели используются в ветви 14 с большинством работоспособных секций 16. Напряжение фаза-нейтраль этой ветви 14 может иметь доминирующие гармоники, сдвинутые выше в частотном спектре. Из-за этого, два межфазных напряжения также будут несколько улучшенными, (Max-Min) и (Max-Mid), но напряжение (Mid-Min) не испытывает влияния.
[0083] Если все секции должны быть использоваться в фазе с максимальным числом работоспособных секций 16 (например, А в данном случае), опорное напряжение в ветви А должно быть изменено на следующее:

[0084] В зависимости от конкретного числа секций 16 и в зависимости от применения, дополнительная выгода от использования всех секций 16 может не подтверждаться. Поскольку (Max-Mid) секций 16 на фазе с наибольшим числом секций 16 не может далее увеличивать межфазное напряжение, эти дополнительные секции 16 можно также шунтировать, либо таким же образом, как дефектные секции 16, либо путем поддержания верхних или нижних переключателей в секциях 16 в положении включения (on), чтобы уменьшить потери.
[0085] Приведенное выше обсуждение исходит из одной возможности для примерного инвертора по Фиг. 1, где ветвь С имеет наименьшее число активных секций 16, ветвь В имеет среднее число, и ветвь А имеет наибольшее число активных секций 16. В других ситуациях обеспечиваются другие расположения или распределения активных секций 16. Ниже приведены аналитические расчеты опорного напряжения для других распределений:
Случай 1. 
Если (Na-Nb) секций не используются на фазе А:

Если все Na секций используются на фазе А:
Случай 2. 
Если (Na-Nс) секций не используются на фазе А:

Если все Na секций используются на фазе А:

Случай 3. 

Если (Nb-Nа) секций не используются на фазе В:

Если все Nb секций используются на фазе B:

Случай 4. 

Если (Nb-Nс) секций не используются на фазе В:

Если все Nb секций используются на фазе В:

Случай 5. 


Если (Nс-Nb) секций не используются на фазе С:

Если все Nс секций используются на фазе С:

Случай 6. 
Если только (Nс-Nа) секций используются на фазе С:

Если все Nс секций используются на фазе С:

Термин m представляет собой индекс модуляции и, как предполагается, имеет значения между 0 и 1, когда член 
[0086] Из Фиг. 3А-С следует, что когда коэффициент мощности нагрузки превышает определенные пределы, то некоторые секции 16 вынуждены работать в режиме регенерации из-за сдвига в нейтральное положение. Работа некоторых секций 16 в режиме регенерации увеличивает напряжение DC-фаза и в конечном итоге приводит к отключению привода из-за перенапряжения, если привод является только однонаправленным. Аналитическое решение для опорного напряжения может быть использовано для определения безопасного рабочего диапазона секций, когда коэффициент мощности нагрузки изменяется. Секции 16, расположенные на фазе с минимальным (Min) числом секций 16, не испытывают влияния коэффициента мощности нагрузки, потому что векторная ориентация этой конкретной фазы не изменилась. Эти секции 16 не будут испытывать какого-либо возможного перенапряжения до тех пор, как угол мощности нагрузки находится в пределах от -90 до +90 градусов.
[0087] Со ссылкой на Фиг. 3A, для секций на фазах А и В, предполагая, что δ является углом между вектором АSN и осью D, максимальный угол нагрузки ограничен следующим образом:

где φLOAD является углом коэффициента мощности нагрузки. Угол δ определяется следующим образом:
[0088] Чтобы гарантировать, что ни одна секция 16 в любой фазе не подвергается опасности работы в режиме регенерации, угол нагрузки ограничен следующим условием:

[0089] По отношению к Фиг. 3А (т.е. минимальное число секций 16 на фазе С), первая часть неравенства является условием, что никакие секции 16 не находятся в режиме регенерации на фазе В, в то время как вторая часть является условием, что никакие секции 16 не находятся в режиме регенерации на фазе А. По отношению к Фиг. 3В (т.е. минимальное число секций 16 на фазе B), первая часть неравенства является условием, что никакие секции 16 не находятся в режиме регенерации на фазе А, в то время как вторая часть является условием, что никакие секции 16 не находятся в режиме регенерации на фазе С. По отношению к Фиг. 3С (т.е. минимальное число секций 16 на фазе А), первая часть неравенства является условием, что никакие секции 16 не находятся в режиме регенерации на фазе С, в то время как вторая часть является условием, что никакие секции 16 не находятся в режиме регенерации на фазе В.
[0090] В течение шунтирования, следующего за нормальным режимом работы, когда угол нагрузки ограничен до значения между -π/2 и π/2, может быть только одна фаза, где секции 16 могут подвергаться действию режима регенерации. Соответствующая фаза может быть определена, если коэффициент мощности нагрузки известен. Используя этот метод с уравнением (38), если то же самое число секций 16 выходит из строя на любых двух фазах, нет необходимости в дополнительном ограничении на коэффициент мощности нагрузки. Это естественный эффект от декомпозиции на различные компоненты (см. уравнение 25). Поскольку на практике только определенное число секций 16 может шунтироваться, прежде чем весь привод будет остановлен, уравнение (38) используется, чтобы свести в таблицу и сохранить минимальный коэффициент мощности для данного привода и данной конфигурации шунтирования, тем самым уменьшая непроизводительные расходы, связанные с фактическим вычислением уравнения (38).
[0091] Процессор 20 генерирует опорные напряжения. Процессор 20 использует память 22 для поиска опорных напряжений. Справочная таблица выводит опорные напряжения как функцию ввода числа активных секций инвертора в различных ветвях 14 (например, ввода Na, Nb и Nc). Соответствующие опорные напряжения для каждой из ветвей 14 и/или секций 16 выводятся. В альтернативных вариантах осуществления память 22 хранит инструкции для расчета опорных напряжений и выполнения каких-либо проверок.
[0092] Память 22 представляет собой память с произвольным доступом, системную память, кэш-память, жесткий диск, буфер, базу данных, их комбинации или другие известные в настоящее время или позднее разработанные устройства памяти для хранения справочной таблицы опорных напряжений как функцию распределений работоспособных секций для операции шунтирования неисправностей каскадного многоуровневого инвертора.
[0093] Память 22 или другая память альтернативно или дополнительно является считываемым процессором носителем данных, хранящим данные, представляющие инструкции, выполняемые программируемым процессором 20 для управления шунтированием неисправностей каскадного многоуровневого инвертора. Инструкции для реализации процессов, способов и/или методов, обсуждаемых здесь, предоставляются на невременных (нетранзиторных) считываемых процессором носителях процессоров, микроконтроллеров, цифровых сигнальных процессоров или памяти, такой как кэш, буфер, RAM (ОЗУ), съемные носители. Функции, действия или задачи, изображенные на чертежах или описанные здесь, выполняются в ответ на один или более наборов инструкций, хранящихся в или на памяти или используемом процессоре. Функции, действия или задачи являются независимыми от конкретного типа набора инструкций, носителей информации, процессора или стратегии обработки и могут быть выполнены посредством программного обеспечения, аппаратных средств, интегральных схем, программно-аппаратных средств, микро кода и т.п., действующих в отдельности или в комбинации. Кроме того, стратегии обработки могут включать многопроцессорную обработку, многозадачность, параллельную обработку и тому подобное.
[0094] На Фиг. 4 показан один вариант осуществления способа для управления шунтированием неисправностей каскадного многоуровневого инвертора. Способ реализуется с помощью системы, показанной на Фиг. 1, множества секций 16 на Фиг. 2 и/или другой системы или секций. Действия выполняются в показанном порядке, и/или могут быть предусмотрены дополнительные, другие действия или меньшее число действий.
[0095] В действии 62, первоначально каскадный многоуровневый инвертор работает в нормальном режиме, в котором секции не имеют повреждений. В действии 64, одна или несколько секций в одной или нескольких фазах выходят из строя или работают некорректным образом. Например, один или более транзисторов или другие элементы схемы выгорают, замыкаются накоротко или размыкаются.
[0096] Эти дефектные секции шунтируются. Результатом является различное число секций, вносящих вклад в выходной сигнал инвертора. Числа секций для каждой фазы равны или различны.
[0097] Проверка может быть выполнена для определения того, работает ли в каждой фазе достаточное число секций. Некоторые комбинации работоспособных секций на фазу могут приводить к размыканию при перенапряжении двигателя, если коэффициент мощности превышает определенные пределы.
[0098] Для режима шунтирования неисправностей, секции управляются различным образом для учета шунтированных секций. Для управления широтно-импульсной модуляцией, опорное напряжение для установления длительности импульса изменяется. В действии 66, где одна или более секций шунтируются, опорные напряжения изменяются для учета шунтирования.
[0099] Работоспособные секции реагируют на сигналы широтно-импульсной модуляции. То же самое опорное напряжение используется всеми секциями каждой ветви, чтобы устанавливать широтно-импульсную модуляцию. В ответ на управление, секции различных ветвей выводят напряжения равной величины между тремя фазами. Сбалансированное соотношение фаз обеспечивается в выходном межфазном напряжении.
[00100] В действии 64 шунтируемые секции идентифицируются для режима шунтирования. Определяются конкретные секции, которые являются активными или неактивными.
[00101] Секции идентифицируются на основе управления секциями. Если секция больше не реагирует, или если другие процессы определили секцию, подлежащую шунтированию, это определение используется для идентификации секций. Альтернативно, электронная схема обнаруживает неисправность, и неисправная секция идентифицируется на основе выходного сигнала этой схемы. В другом варианте осуществления воспринимается надлежащее функционирование. Неисправные или шунтированные секции идентифицируются путем не включения в список исправных секций. Любой подход может быть использован для идентификации секций для шунтирования или шунтируемых секций.
[00102] Числа шунтированных и/или работоспособных секций определяются для каждой фазы. Одна фаза может иметь больше или меньше работоспособных секций с соответствующим большим или меньшим числом дефектных секций, чем другая фаза.
[00103] В действии 66, выполняется управление работой работоспособных секций. Опорное напряжение, используемое для установления широтно-импульсной модуляции, устанавливается на основе количества активных секций. Вычисляются опорные напряжения. Альтернативно осуществляется поиск предварительно вычисленных опорных напряжений для данной ситуации шунтирования.
[00104] Опорные напряжения вычисляются путем моделирования инвертора в виде комбинации трех инверторов. Первый инвертор имеет то же самое число секций на каждой ветви, равное минимальному числу доступных секций на каждой ветви. Второй инвертор состоит из двух ветвей с числом секций, равным разности между средним числом секций в одной ветви и минимальным числом секций в другой ветви. Третья ветвь второго инвертора не имеет секций. Третий инвертор имеет одну ветвь с числом секций, равным разности между максимальным числом секций в одной ветви и средним числом секций в другой ветви. Вторая и третья ветви третьего инвертора не имеют секций.
[00105] Ветвь с большинством работоспособных секций может работать одним из двух способов. В первом способе все работоспособные секции управляются. Во втором способе приводится в действие только число секций, равное числу секций в ветви со средним числом. Опорное напряжение и/или широтно-импульсная модуляция для ветви с наибольшим числом секций устанавливается на основе выбранного числа секций для использования.
[00106] Опорные напряжения представляют собой аналитическое решение. Управление работой осуществляется без обратной связи от напряжения, выводимого каскадным многоуровневым инвертором. Процессор 20 генерирует опорные напряжения без обратной связи. Напряжение, выводимое одной или более секциями 16, одной или более ветвями 14 или на АС двигатель 18, не используется в цепи обратной связи, чтобы устанавливать опорное напряжение. Не требуется точность усиления обратной связи. Частота привода каскадного многоуровневого инвертора может быть высокой, так как никакое усиление обратной связи не ограничивает работу в области высоких частот. Опорные напряжения формируются без аппроксимации на основе соотношения числа активных к неактивным секциям для данной фазы. Аппроксимация на основе числа активных к неактивным секциям в фазе А не используется; аппроксимация на основе числа активных к неактивным секциям в фазе В не используется; и аппроксимация на основе числа активных к неактивным секциям в фазе С не используется. Используются различные коэффициенты на основе соотношения активных секций между фазами.
[00107] На фиг. 5-26 относятся к компьютерному моделированию с использованием аналитически вычисленных опорных напряжений. Моделируемым приводом является привод "Perfect Harmony" от Siemens с девятью секциями, по три секции на фазу. Используются девять несущих при нормальных условиях, когда никакие секции не шунтируются. Несущая представляет собой треугольное колебание, сравниваемое с опорным напряжением для установления модуляции импульсного колебания. Предполагается, что частота переключения равна 600 Гц для каждого транзистора (например, IGBT), и выходная частота равна 60 Гц. Соединенная звездой R-L нагрузка рассматривается со значениями 2 Ом и 5 мГн соответственно. Каждое напряжение DC-фаза секции H-моста (Фиг. 2) предполагается равным 800 В DС. Если не указано иное, то формы сигналов изображены при максимальном индексе модуляции.
[00108] Фиг. 5-8 изображают опорные напряжения на каждой фазе, токи фаз и межфазные напряжения соответственно от А к В и от В к С для случая, когда одна секция шунтирована в фазе С. Фиг. 9-12 изображают опорные напряжения на каждой фазе, токи фаз и межфазные напряжения соответственно от А к В и от В к С для случая, когда две секции шунтированы в фазе C. Фиг. 13-16 изображают опорные напряжения на каждой фазе, токи фаз и межфазные напряжения соответственно от А к В и от В к С для случая, когда две секции шунтированы в фазе С и одна секция в фазе B. Гармонические спектры двух межфазных напряжений (А к В) и (В к С) изображены на Фиг. 17 и 18 соответственно. Фиг. 20-22 изображают опорные напряжения на каждой фазе, токи фаз и межфазные напряжения соответственно от А к В и от В к С для случая, когда две секции шунтированы в фазе С и по одной секции в фазах А и В. Гармонические спектры двух межфазных напряжений (А к В) и (B к С) изображены на Фиг. 24 и 25 соответственно.
[00109] Если фаза А имеет все три функционирующих секций и на одну больше, чем в любой из двух других фаз, три или две секции могут быть использованы в фазе А. Одна конфигурация привода (Na=3, Nb=2, Nc=1) может сравниваться с другой конфигурацией привода (Na=2, Nb=2, Nc=1). Эта другая конфигурация является такой, при которой одна исправная секция была намеренно шунтирована в фазе А. Таблица I сравнивает две конфигурации, показывая, что различия довольно незначительны с точки зрения качества форм сигналов.
Сравнение между двумя конфигурациями шунтирования
[00110] Таблица II подтверждает, что обе конфигурации выводят то же максимальное выходное напряжение, результат, который соответствует уравнению (30).
Сравнение максимального напряжения между двумя конфигурациями шунтирования
Моделированные напряжения основной частоты в Таблице II очень близки к идеальному максимальному напряжению, соответственно уравнению (30), которое равно (Mid+Min)⋅Vdc=3⋅800=2400 В АС.
[00111] В то время как изобретение было описано выше со ссылкой на различные варианты осуществления, следует понимать, что многие изменения и модификации могут быть сделаны без отклонения от объема изобретения. Поэтому предполагается, что приведенное выше подробное описание следует рассматривать как иллюстративное, а не ограничивающее, и следует понимать, что именно следующие пункты формулы изобретения, в том числе все эквиваленты, предназначены для определения сущности и объема данного изобретения.
Каскадный многоуровневый инвертор управляется в режиме шунтирования неисправностей. Вместо того чтобы основываться на аппроксимациях или формах обратной связи, опорные напряжения генерируются как аналитическое решение. Аналитическое решение и его реализация не подвергаются влиянию выходной частоты инвертора и способны обеспечивать максимально возможное сбалансированное межфазное напряжение для трехфазного двигателя. Кроме того, аналитическое решение обеспечивает точные пределы для допустимой рабочей области коэффициента мощности двигателя, чтобы предотвратить условия перенапряжения в секциях инвертора. 3 н. и 18 з.п. ф-лы, 26 ил., 2 табл.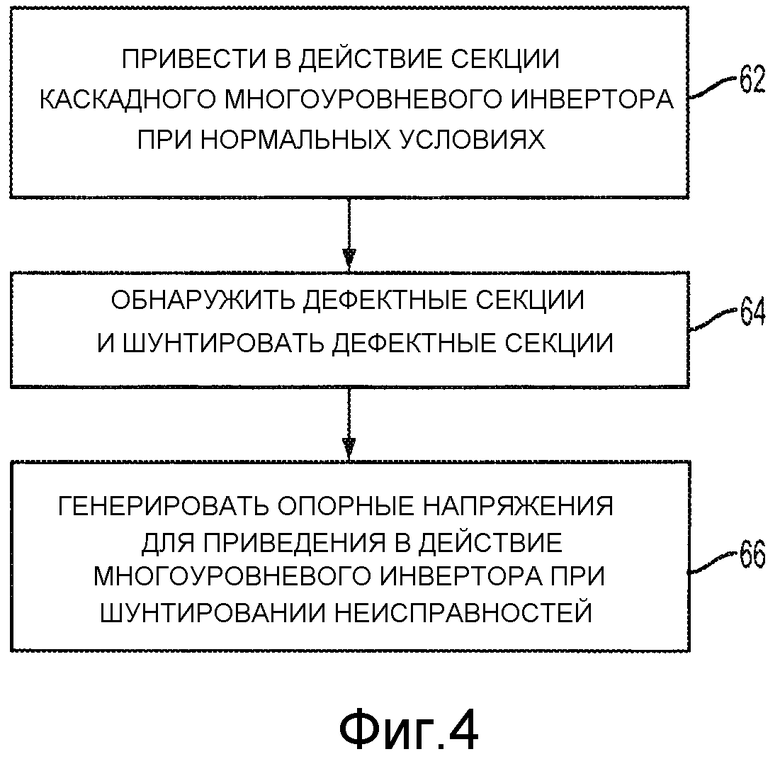
1. Система управления шунтированием неисправности каскадного многоуровневого инвертора, причем система содержит:
первое множество секций первой ветви инвертора, соединенных последовательно для первой фазы;
второе множество секций второй ветви инвертора, соединенных последовательно для второй фазы;
третье множество секций третьей ветви инвертора, соединенных последовательно для третьей фазы; и
причем шунтирование неисправности приводит к отличающемуся числу секций первой ветви инвертора в первом множестве, чем число секций второй ветви инвертора во втором множестве, являющихся активными;
процессор, выполненный с возможностью генерировать опорные напряжения, без обратной связи, для активных секций первой, второй и третьей ветви инвертора, причем все из активных секций первой ветви инвертора работают с первым общим одним из опорных напряжений, все из активных секций второй ветви инвертора работают со вторым общим одним из опорных напряжений, и все из активных секций третьей ветви инвертора работают с третьим общим одним из опорных напряжений.
2. Система по п. 1, дополнительно содержащая память, причем память содержит справочную таблицу опорных напряжений, при этом справочная таблица выводит опорные напряжения как функцию ввода чисел активных секций первой, второй и третьей ветви инвертора.
3. Система по п. 1, в которой секции первой, второй и третьей ветви инвертора работают с модуляцией импульсного колебания в ответ на опорные напряжения.
4. Система по п. 1, в которой процессор выполнен с возможностью генерировать опорные напряжения без аппроксимации на основе числа активных секций из секций первой ветви инвертора, секций второй ветви инвертора и секций третьей ветви инвертора.
5. Система по п. 1, в которой число активных секций первой ветви инвертора меньше, чем число активных секций второй ветви инвертора, и в которой процессор выполнен с возможностью генерировать опорные напряжения в качестве аналитического решения на основе чисел активных секций первой и второй ветвей инвертора.
6. Система по п. 5, в которой процессор выполнен с возможностью генерировать опорное напряжение для секций первой ветви инвертора как функцию от:
 , где СМО является сдвигом общего режима, ω - частота и t - время, и чтобы генерировать опорное напряжение для секций второй ветви инвертора как функцию от:
, где СМО является сдвигом общего режима, ω - частота и t - время, и чтобы генерировать опорное напряжение для секций второй ветви инвертора как функцию от:

где Nc - число активных секций первой ветви инвертора, Nb - число активных секций второй ветви инвертора.
7. Система по п. 6, в которой процессор выполнен с возможностью генерировать, когда используются все активные секции третьей ветви инвертора, опорное напряжение для секций третьей ветви инвертора как функцию от:

где Na - число активных секций третьей ветви инвертора.
8. Система по п. 6, в которой число Na активных секций третьей ветви инвертора больше, чем Nb и Nc, и в которой процессор выполнен с возможностью генерировать, когда Na-Nb активных секций третьей ветви инвертора не работают, опорное напряжение для секций третьей ветви инвертора как функцию от:

где Na - число активных секций третьей ветви инвертора.
9. Система по п. 1, в которой процессор выполнен с возможностью генерировать опорные напряжения для секций первой, второй и третьей ветви инвертора таким образом, что напряжение равной величины обеспечивается между каждой из первой, второй и третьей фазами, и таким образом, что имеется сбалансированное фазовое соотношение в межфазном выходном напряжении.
10. Система по п. 1, в которой процессор выполнен с возможностью генерировать опорные напряжения как функцию первого набора секций первой, второй и третьей ветвей инвертора, где число каждых из секций первой, второй и третьей ветвей инвертора равно, и как функцию второго набора секций первой и второй ветвей инвертора, но не секций третьей ветви инвертора.
11. Система по п. 1, в которой число Na активных секций первой ветви инвертора больше, чем число Nb активных секций второй ветви инвертора, и число Nb активных секций второй ветви инвертора больше, чем число Nc активных секций третьей ветви инвертора, и в которой процессор выполнен с возможностью генерировать опорные напряжения, приводящие к максимальному межфазному напряжению первой, второй и третьей фаз, которое является суммой напряжений от Nc и Nb активных секций ветвей инвертора.
12. Способ управления шунтированием неисправностей каскадного многоуровневого инвертора, причем способ содержит:
приведение в действие каскадного многоуровневого инвертора при шунтировании неисправностей;
идентификацию первой ветви как имеющей меньше работающих секций многоуровневого инвертора, чем вторая ветвь многоуровневого инвертора во время работы; и
управление работой большего числа секций второй ветви как функции от числа работающих секций первой ветви.
13. Способ по п. 12, в котором приведение в действие содержит широтно-импульсную модуляцию менее чем всех секций первой ветви, секций второй ветви и секций третьей ветви, и в котором управление содержит генерацию опорного напряжения, управляющего широтно-импульсной модуляцией.
14. Способ по п. 12, в котором приведение в действие содержит шунтирование по меньшей мере одной из секций первой ветви, и в котором идентификация содержит определение, что по меньшей мере одна из секций шунтируется.
15. Способ по п. 12, в котором управление содержит генерацию того же самого первого опорного напряжения для всех работающих секций первой ветви, и генерацию того же самого второго опорного напряжения для всех работающих секций второй ветви.
16. Способ по п. 12, дополнительно содержащий:
идентификацию второй ветви как имеющей меньше работающих секций многоуровневого инвертора, чем третья ветвь каскадного многоуровневого инвертора, во время работы;
при этом управление содержит приведение в действие третьей ветви с менее чем всеми работоспособными секциями.
17. Способ по п. 12, в котором управление содержит управление без обратной связи от напряжения, выведенного из каскадного многоуровневого инвертора.
18. Способ по п. 12, в котором приведение в действие содержит вывод с напряжением одинаковой величины, обеспеченным между первой ветвью, второй ветвью и третьей ветвью, и таким образом, что существует сбалансированное соотношение фаз в межфазном выходном напряжении.
19. Способ по п. 12, в котором первая ветвь имеет Nс работающих секций, вторая ветвь имеет Nb работающих секций, и третья ветвь имеет Na работающих секций, где Nc < Nb ≤ Na, и в котором управление содержит генерацию опорного напряжения для первой ветви как:
 , где ω - частота, t - время и СМО - сдвиг общего режима, для второй ветви как:
, где ω - частота, t - время и СМО - сдвиг общего режима, для второй ветви как:

и для третьей ветви как одно из:
 или
или

20. Система для управления шунтированием неисправностей каскадного многоуровневого инвертора, причем система содержит:
первую, вторую и третью ветви каскадного многоуровневого инвертора, причем по меньшей мере третья ветвь имеет меньшее число работающих секций, чем число второй ветви и число первой ветви; и
процессор, выполненный с возможностью управлять широтно-импульсной модуляцией секций первой, второй и третьей ветвей как функцию первого, второго и третьего опорных напряжений, соответственно, причем каждое из первого, второго и третьего опорных напряжений включает в себя член для сбалансированного числа секций в первой, второй и третьей ветвях, а второе и третье опорные напряжения включают в себя член для разности между меньшим числом секций третьей ветви и числом второй ветви без разности между числом первой ветви и числом второй ветви или числом третьей ветви.
21. Система по п. 20, в которой процессор выполнен с возможностью генерировать третье опорное напряжение, причем первое и второе опорные напряжения являются первым коэффициентом третьего опорного напряжения, причем первый коэффициент содержит функцию числа секций третьей ветви, плюс второй коэффициент другого члена, второй коэффициент содержит функцию числа секций второй ветви минус число секций третьей ветви.
| ТРАНСПОРТЕР | 1937 |
|
SU52283A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С МНОГОУРОВНЕВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289191C1 |
| US 5625545 A1, 29.04.1997. | |||

