Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучении (ИРИ) относится к области радиотехники, а именно к системам радиоконтроля для определения местоположения источников радиоизлучения УКВ-СВЧ диапазонов, как цифровых, так и аналоговых видов связи, сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы или государственной службы надзора за связью). Изобретение может быть использовано также при поиске местоположения средств радиосвязи, как возможных источников помех связи.
Известны способы определения координат ИРИ, в которых используются пассивные пеленгаторы в количестве не менее трех, центр тяжести области пересечения выявленных азимутов которых на фронт прихода волны принимается за оценку местоположения. Основными принципами работы таких пеленгаторов являются амплитудные, фазовые и интерферометрические [1, 2]. К их недостаткам следует отнести высокую степень сложности антенных систем, коммутационных устройств и наличие многоканальных радиоприемников.
Наличие в федеральных округах государственной радиочастотной службы взаимосвязанных через центральный пункт разветвленной сети радиоконтрольных постов (РКП), оборудованных средствами приема радиосигналов, измерения и обработки их параметров, позволяет дополнить их функции и задачами определения местоположения тех ИРИ, сведения о которых отсутствуют в базе данных, не прибегая к использованию сложных и дорогостоящих пеленгаторов.
Из других известных способов и устройств, близкими аналогами предлагаемого способа по технической сущности и предназначенными для использования при радиоконтроле, могут быть [3, 4].
Способ [3] основан на приеме сигналов тремя антеннами, образующими две пары измерительных баз, измерении разностей времени прихода сигналов ИРИ и детерминированных вычислений искомых координат.
К недостаткам способа следует отнести:
1. Большое количество антенн.
2. Способ не ориентирован на использование РКП.
3. Измерительные базы для вычисления разности времен прихода сигналов ИРИ парами антенн существенно ограничивают разнос этих антенн, не говоря о нецелесообразности и большой технической сложности реализации способа.
Разнесенный разностно-дальномерный пеленгатор [4], состоящий из двух периферийных пунктов, центрального и системы единого времени. Периферийные пункты предназначены для приема, хранения, обработки сигналов и передачи фрагментов сигналов на ЦП, на котором вычисляется разность времени прихода сигналов. В системе единого времени применяется хронизатор, представляющий привязанный к шкале единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в ЗУ значений уровня сигнала к значению времени приема.
Данному пеленгатору свойственны следующие недостатки:
1. Не адаптирован к РКП, используемым в филиалах федеральных округов государственной радиочастотной службы или государственной службы надзора за связью.
2. Большое количество специализированных пеленгационных (но не радиоконтрольных) постов.
3. Необоснованное и не раскрытое (хотя бы до функциональной схемы) применение системы единого времени на ЦП и хронизаторов на ПП, синхронизированных с системой единого времени.
4. Необходимость в наличии радиоканалов с большой пропускной способностью (до 625 Мбод) для передачи даже фрагментов сигналов с ПП1 и ПП2 на ЦП.
5. Для организации радиоканала необходимы радиопередающие устройства и получение разрешения на их работу в определенных условиях эксплуатации.
Наиболее близким аналогом, выбранным за прототип предлагаемого способа, является [5].
Способ [5] относится к пассивным системам радиоконтроля и предназначен для определения координат источников радиоизлучений УКВ-СВЧ диапазонов, использующих цифровые (дискретные) виды сигналов из одного РКП. Способ определения местоположения ИРИ основан на измерении направления на ИРИ, оценке относительной временной задержки, с последующим вычислением координат ИРИ как точки пересечения линии направления на источник и гиперболической линии положения. Все измерения производятся на одном приемном пункте. При этом, оценка относительной временной задержки определяется путем определения расхождения времени прихода сигнала от источника относительно опорной временной шкалы, сформированной на основе оценки временной структуры сигнала источника, местоположение которого полагается известным, определяемой на основе сравнения оценок расхождения времени прихода сигналов по времени от источников с известным и оцениваемым местоположением, функционирующих в единой системе синхронизации цифровыми (дискретными) видами сигналов.
Недостатками прототипа являются:
1. Способ распространяется только на цифровые (дискретные) виды средств связи с четко выраженным периодом следования импульсов тактовой (цикловой) синхронизации, функционирующие в единой системе синхронизации, временные параметры которой и точность их определения существенно влияют на оценку относительной временной задержки, а, следовательно, и точность определения координат искомого ИРИ.
2. Отсутствует решение по повышению точности оценки определения координат искомого ИРИ, например, путем увеличении числа корреспондентов из состава радиосети и усреднения результатов вычисления координат искомого ИРИ применительно к каждому из корреспондентов радиосети;
3. Должна быть априорно известна (либо доступна оцениванию) частотно-временная структура сигнала (частота (период) следования импульсов тактовой (цикловой) синхронизации). При этом, оценивание частотно-временной структуры сигнала приводит к появлению дополнительной погрешности вычисления координат искомого ИРИ и появлению дополнительных временных и аппаратурных затрат при внедрении способа.
4. Область применения способа ограничивается тем, что для реализации способа необходимо иметь:
а) особое радиоприемное устройство, в котором дополнительно должен быть введен автокоррелятор;
б) пеленгатор, удовлетворяющий требованиям по достаточной точности пеленгования, исходя из точности определения координат искомого ИРИ.
Целью настоящего изобретения является разработка способа, обеспечивающего определение координат местоположения ИРИ УКВ-СВЧ диапазонов из одного РКП без недостатков, присущих прототипу. Эта цель достигается с помощью признаков, указанных в формуле изобретения, общих с прототипом: способ определения координат местоположения ИРИ, основанный на измерении параметров искомого ИРИ на одном РКП и вычислении тех же параметров в точках, местоположение которых полагается известным, и отличительных признаков, состоящих в том, что используют как цифровые, так и аналоговые виды связи и измеряют напряженность поля искомого ИРИ, применяя, при этом, РКП с логопериодической поворотной антенной системой (ЛПАС), задают координаты местоположения n (более или равно двум) виртуальных постов (ВП), не лежащих с ним на одной прямой и находящихся на расстоянии нескольких угловых минут относительно РКП, разбивают зону электромагнитной доступности вокруг РКП на k азимутальных секторов, задавая предельные значения координат их точек, вычисляют по специализированной программе [6] или аналогичной ей, напряженность поля в месте расположения n (более или равно двум) ВП и РКП, создаваемую каждым из источников радиоизлучения заданного диапазона частот, находящихся во всех k азимутальных секторах, устанавливают корреляционную зависимость между величинами напряженностей поля на каждом из n ВП и напряженностью поля на РКП, измеряют на последнем напряженность поля от искомого ИРИ, и по ее величине для азимутальных участков с максимальным коэффициентом корреляции определяют величину напряженности поля на соответствующем ВП, после чего задают координаты местоположения пробной точки (ПТ), как текущего местоположения искомого источника радиоизлучения, составляют  и
и  мультипликативных функций, представляющих сочетания, взятые по два и по три, разностей отношений расстояний от ВП к расстоянию РКП до местоположения ПТ, и вычисленных
мультипликативных функций, представляющих сочетания, взятые по два и по три, разностей отношений расстояний от ВП к расстоянию РКП до местоположения ПТ, и вычисленных  парных сочетаний (n+1) обратных отношений напряженностей сигналов искомого ИРИ, соответствующих этим расстояниям, а затем равномерно или дихотомически, или методом наискорейшего спуска изменяют значение одной из координат ПТ при неизменном значении ее другой и находят точки экстремумов
парных сочетаний (n+1) обратных отношений напряженностей сигналов искомого ИРИ, соответствующих этим расстояниям, а затем равномерно или дихотомически, или методом наискорейшего спуска изменяют значение одной из координат ПТ при неизменном значении ее другой и находят точки экстремумов  или перегиба
или перегиба  мультипликативных функций, координаты которых по всем М2 и М3 сочетаниям корректируют по калибровочным характеристикам пар РКП - ВП, представляющим зависимости разности вычисленных координат ПТ и истинных координат источников радиоизлучений, известных по соответствующей базе данных, как функцию ошибки определения координат, а потом усредняют и фиксируют как окончательные координаты местоположения искомого ИРИ,
мультипликативных функций, координаты которых по всем М2 и М3 сочетаниям корректируют по калибровочным характеристикам пар РКП - ВП, представляющим зависимости разности вычисленных координат ПТ и истинных координат источников радиоизлучений, известных по соответствующей базе данных, как функцию ошибки определения координат, а потом усредняют и фиксируют как окончательные координаты местоположения искомого ИРИ,
кроме того, отличающийся по п. 1 тем, что по измеренному азимуту и координатам местоположения РКП составляют уравнение азимутальной прямой и пробную точку перемещают по ней, а предварительные координаты местоположения пробной точки на этой прямой задают при максимальном расстоянии от РКП, в соответствии с зоной его электромагнитной доступности.
Исходными условиями для реализации способа однопозиционного определения координат местоположения ИРИ являются:
1. Антенны искомых источников радиоизлучения являются ненаправленными.
2. Условия измерения и местоположение искомого ИРИ за время проведения измерений и вычисления координат его местоположения не изменяются. Эти условия, в большинстве случаев, выполняются и не ограничивают применение способа.
Заявленный способ поясняется чертежами, на которых показаны:
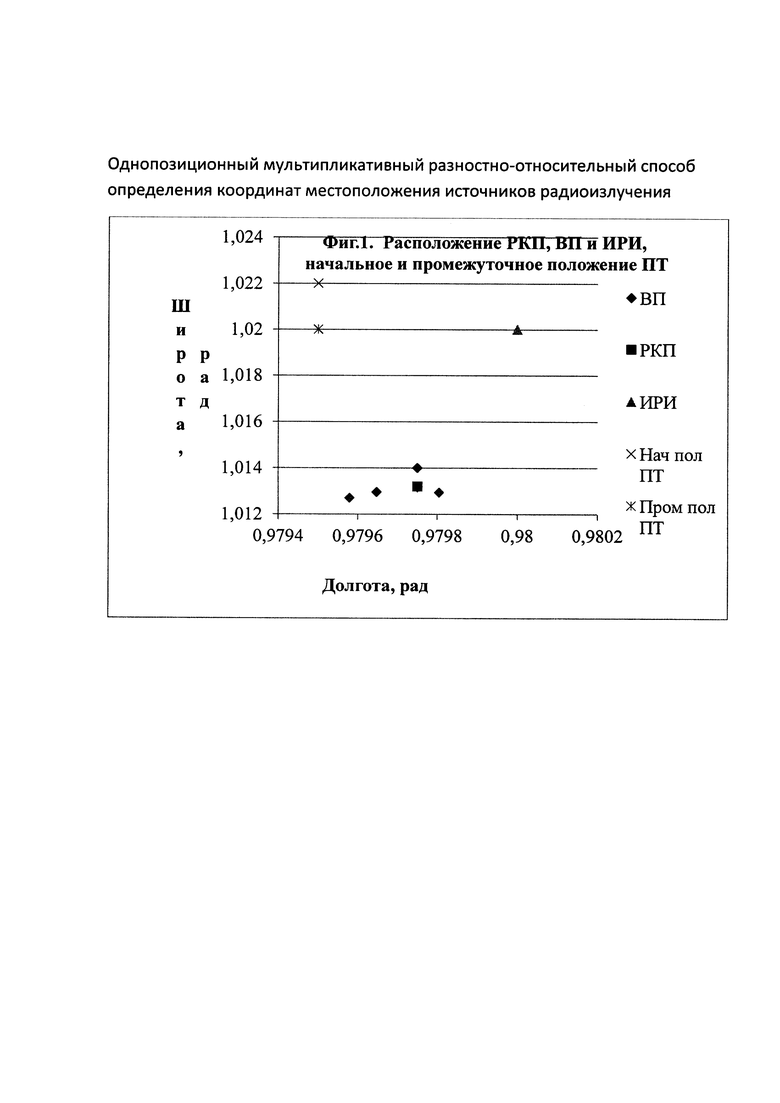
фиг. 1 - расположение РКП, ВП и ИРИ, начальное и промежуточное положение ПТ;
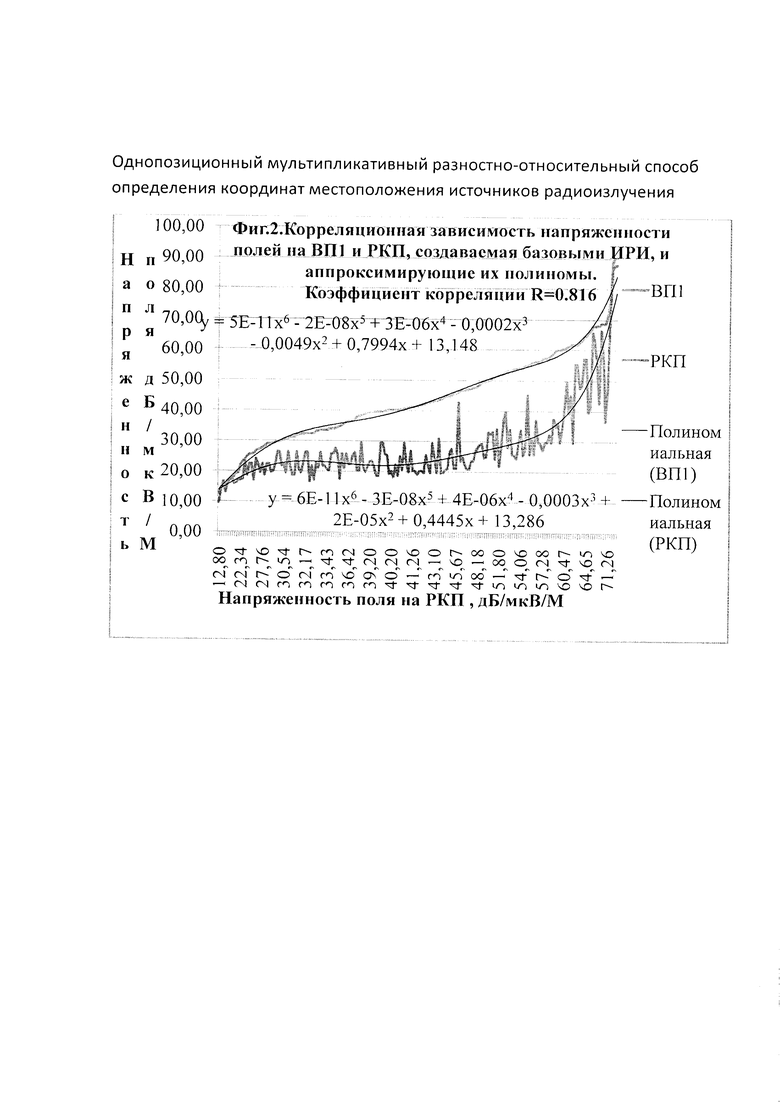
фиг. 2 - корреляционная зависимость напряженностей поля для пары РКП - ВП1 и аппроксимирующие их полиномы, коэффициент корреляции R=0.816;
фиг. 3- изменение двух попарных произведений разностей отношений при последовательном поиске местоположения ИРИ;
фиг. 4 - изменение произведения трех разностей отношений при последовательном поиске местоположения ИРИ;
фиг. 5 - калибровочная характеристика пары РКП - ВП по широте;
фиг. 6 - калибровочная характеристика пары РКП - ВП по долготе;
фиг. 7 - расположение РКП, ВП, начальное, одно промежуточное и конечное положение ПТ.
В основе способа лежит энергетический принцип, заключающийся в измерении (или вычислении) напряженности поля ИРИ в нескольких точках пространства с известными координатами их местоположения. При этом напряженность поля ИРИ на РКП измеряют, а в дополнительной точке (точках) вычисляют. В качестве дополнительной точки в способе предложен виртуальный пост (ВП), координаты которого и параметры его виртуальной антенны (диаграмма направленности и высота подвеса) задаются. При использовании n ВП они размещаются не на одной прямой с РКП и отстоят от него на несколько угловых минут. На фиг. 1 показано условное расположение ВП, РКП и ИРИ. Диаграмма направленности виртуальной антенны и высота ее подвеса выбираются такими же, как и на РКП. Вычисление напряженности на ВП основано на принципе корреляционной зависимости напряженностей полей, создаваемых в заданном диапазоне частот множеством источников радиоизлучения, находящихся, согласно базе данных, в зоне электромагнитной доступности РКП и вычисляемых как для РКП, так и для всех заданных ВП по определенной программе [6]. В качестве примера, на фиг. 2 приведена корреляционная зависимость напряженностей поля между РКП и одним из ВП. А именно, для пары ВП1 и РКП коэффициент корреляции, показывающий тесноту связи между напряженностями полей, равен R=0,816. Для других ВП, отстоящих от РКП на 3 и 5 угловых минут по долготе, в частности для ВП2 и ВП3, их коэффициенты корреляции с напряженностью поля на РКП, а также между собой, приведены, в качестве примера, ниже в таблице 1:

Предварительно разбивают зону электромагнитной доступности РКП относительно последнего на k азимутальных секторов с шириной каждого сектора, равной погрешности определения азимута, используемой для этой цели, ЛПАС. Такую корреляционную зависимость получают для всех k азимутальных секторов. Затем для азимутальных секторов с высоким коэффициентом корреляции напряженностей полей пар РКП - ВП, например, более 0,7, и измеренной на РКП напряженности поля искомого ИРИ определяют напряженность на соответствующих ВП. На основании полученных пар напряженности полей РКП - ВП последовательно определяют параметры местоположения ИРИ: широту - Xi и долготу - Yi по критерию достижения точки экстремума мультипликативной функцией разностей отношений расстояний местоположения ИРИ до каждой из соответствующих местоположений пар РКП - ВП и соответствующих им обратных отношений уровней сигналов, полученных в этих парах, и взятых в сочетаниях по два или достижения точки перегиба тех же мультипликативных функций, взятых в сочетаниях по три.
Рассмотрим подробнее получение мультипликативных функций. После задания исходного положения ПТ, путем присвоения ей координат, вычисляют расстояния от i-го местоположения ПТ, до каждой j-й точки, включая один РКП и все n ВП (j=n+1), по формуле  . Затем вычисляют попарные отношения этих расстояний. Обозначив РКП индексом 1, а индексами 2, 3, 4…n соответствующие ВП, эти отношения представим в виде, например,
. Затем вычисляют попарные отношения этих расстояний. Обозначив РКП индексом 1, а индексами 2, 3, 4…n соответствующие ВП, эти отношения представим в виде, например,  ,
,  ,
,  и т д. Таких отношений, назовем их прямыми, всего для одного РКП и n ВП может быть получено
и т д. Таких отношений, назовем их прямыми, всего для одного РКП и n ВП может быть получено  . Но есть и инверсные отношения, такие, например, как
. Но есть и инверсные отношения, такие, например, как 
 . Их количество также равно
. Их количество также равно  . Всего может быть составлено
. Всего может быть составлено  отношений для расстояний. Аналогичные отношения составляют и для прямых отношений напряженностей полей
отношений для расстояний. Аналогичные отношения составляют и для прямых отношений напряженностей полей  ,
,  ,
,  и т.д. и инверсных отношений, таких, например, как
и т.д. и инверсных отношений, таких, например, как 
 и их комбинаций. Всего прямых и инверсных отношений напряженностей может быть также составлено
и их комбинаций. Всего прямых и инверсных отношений напряженностей может быть также составлено  . Полученные отношения сравнивают, путем вычитания, и получают функцию F попарных разностей отношений расстояний и обратных им отношений напряженностей. Например, эту разность для РКП и ВП1 определяют как F12=(n12i-n21). Для ВП2 и ВП3 - как F23=(n23i-n32).
. Полученные отношения сравнивают, путем вычитания, и получают функцию F попарных разностей отношений расстояний и обратных им отношений напряженностей. Например, эту разность для РКП и ВП1 определяют как F12=(n12i-n21). Для ВП2 и ВП3 - как F23=(n23i-n32).
Таких функций F попарных разностей отношений расстояний и обратных им отношений напряженностей поля их комбинаций всего может быть составлено тоже  функций. Из этих попарных разностей отношений составляют первый вид мультипликативных функций попарных произведений разностей отношений F1 Например, для пары РКП и ВП2 и пары ВП2 и ВП3 получают F1,12.23=F12*F23.
функций. Из этих попарных разностей отношений составляют первый вид мультипликативных функций попарных произведений разностей отношений F1 Например, для пары РКП и ВП2 и пары ВП2 и ВП3 получают F1,12.23=F12*F23.
Для пары РКП и ВП2 и пары РКП и ВП3 - F1,12.31=F12*F31 и т д. Всего может быть составлено  функций F1, для которых, с целью определения координат местоположения искомого ИРИ, находят их экстремумы. Примеры графического отображения таких функций приведены на фиг. 3. Составляют также функции F2 произведения трех разностей отношений отношений F. Например, для РКП и ВП3: F2 12.23.31=F12*F23*F31, Всего может быть составлено
функций F1, для которых, с целью определения координат местоположения искомого ИРИ, находят их экстремумы. Примеры графического отображения таких функций приведены на фиг. 3. Составляют также функции F2 произведения трех разностей отношений отношений F. Например, для РКП и ВП3: F2 12.23.31=F12*F23*F31, Всего может быть составлено  функций F2, для которых находят их точки перегиба. Примеры графического отображения таких функций приведены на фиг. 4. Координаты местоположения искомого ИРИ, при этом, могут вычисляться методом последовательного приближения, методом наискорейшего спуска или по методу дихотомии, например, методу поразрядного уравновешивания или другим методом. Для использования, например метода поразрядного уравновешивания, априори должны быть известны диапазоны D значений искомых величин. Эти диапазоны обычно известны, исходя из известных параметров зоны электромагнитной доступности используемых РКП. В соответствии с алгоритмом поразрядного уравновешивания, первоначально, путем присвоения, пробной точке (ПТ) задают, в качестве координат начального ее местоположения (см. фиг. 1.), среднее из диапазона D значение определяемой величины (например, широты) при фиксированных, но лежащих в известных диапазонах значений долготы. Если значение мультипликативной функции окажется меньше нуля, то к первоначальному значению широты местоположения ПТ добавляют 1/4 часть диапазона по широте. В противном случае из первоначального значения широты вычитают 1/4 часть диапазона ее значения. Затем опять производят вычисление расстояний от нового положения ПТ до РКП и ВП и оценку результатов сравнения, как описано выше. При этом добавляют (или вычитают) уже 1/8 часть диапазона, затем 1/16 часть и т.д. Такие итерации продолжают до тех пор, пока результат сравнения не окажется по модулю меньше заранее заданного значения погрешности дискретизации каждого параметра местоположения
функций F2, для которых находят их точки перегиба. Примеры графического отображения таких функций приведены на фиг. 4. Координаты местоположения искомого ИРИ, при этом, могут вычисляться методом последовательного приближения, методом наискорейшего спуска или по методу дихотомии, например, методу поразрядного уравновешивания или другим методом. Для использования, например метода поразрядного уравновешивания, априори должны быть известны диапазоны D значений искомых величин. Эти диапазоны обычно известны, исходя из известных параметров зоны электромагнитной доступности используемых РКП. В соответствии с алгоритмом поразрядного уравновешивания, первоначально, путем присвоения, пробной точке (ПТ) задают, в качестве координат начального ее местоположения (см. фиг. 1.), среднее из диапазона D значение определяемой величины (например, широты) при фиксированных, но лежащих в известных диапазонах значений долготы. Если значение мультипликативной функции окажется меньше нуля, то к первоначальному значению широты местоположения ПТ добавляют 1/4 часть диапазона по широте. В противном случае из первоначального значения широты вычитают 1/4 часть диапазона ее значения. Затем опять производят вычисление расстояний от нового положения ПТ до РКП и ВП и оценку результатов сравнения, как описано выше. При этом добавляют (или вычитают) уже 1/8 часть диапазона, затем 1/16 часть и т.д. Такие итерации продолжают до тех пор, пока результат сравнения не окажется по модулю меньше заранее заданного значения погрешности дискретизации каждого параметра местоположения  , где m - количество итераций. После определения промежуточного положения ПТ (см фиг. 1), с координатой по широте, ближайшей к широте местоположения искомого ИРИ, приступают к вычислению по такому же алгоритму следующей координаты местоположения ПТ-долготы. Найденные координаты всех точек экстремумов
, где m - количество итераций. После определения промежуточного положения ПТ (см фиг. 1), с координатой по широте, ближайшей к широте местоположения искомого ИРИ, приступают к вычислению по такому же алгоритму следующей координаты местоположения ПТ-долготы. Найденные координаты всех точек экстремумов  и перегиба
и перегиба  мультипликативных функций по всем М2 и М3 сочетаниям представляют координаты конечного положения ПТ. Эти координаты корректируют по калибровочным характеристикам (КХ) пар РКП - ВП. КХ представляет зависимость разности истинных значений широт и долгот местоположения источников радиоизлучений, известных по соответствующей базе данных, так называемых базовых ИРИ, и вычисленных для тех же источников радиоизлучений значений широт и долгот, полученных в точках экстремума и перегиба мультипликативных функций, как функцию ошибки определения координат. КХ получают для всех пар РКП - ВП всех k азимутальных секторов. На фиг. 5 показан пример КХ по широте, а на фиг. 6 - по долготе. После корректировки координат конечного положения ПТ координаты усредняют по всем точкам экстремума и перегиба, и фиксируют, уже как окончательные координаты местоположения ПТ. То есть фиксируют, как искомые координаты местоположения ИРИ.
мультипликативных функций по всем М2 и М3 сочетаниям представляют координаты конечного положения ПТ. Эти координаты корректируют по калибровочным характеристикам (КХ) пар РКП - ВП. КХ представляет зависимость разности истинных значений широт и долгот местоположения источников радиоизлучений, известных по соответствующей базе данных, так называемых базовых ИРИ, и вычисленных для тех же источников радиоизлучений значений широт и долгот, полученных в точках экстремума и перегиба мультипликативных функций, как функцию ошибки определения координат. КХ получают для всех пар РКП - ВП всех k азимутальных секторов. На фиг. 5 показан пример КХ по широте, а на фиг. 6 - по долготе. После корректировки координат конечного положения ПТ координаты усредняют по всем точкам экстремума и перегиба, и фиксируют, уже как окончательные координаты местоположения ПТ. То есть фиксируют, как искомые координаты местоположения ИРИ.
За счет усреднения повышают точность определения координат, которая существенно зависит от общего количества усреднений М=М2+М3, определяемое количеством ВП. Для оценки точности определения координат приведем таблицу 2 для различного количества ВП.

Из таблицы видно, что, в отличие от прототипа, оценки среднего линейного и среднеквадратического отклонения вычисляемых координат могут быть, существенно улучшены. Например, при n=5 точность среднего линейного отклонения повышается более, чем в 17000 раз, а среднеквадратического отклонения - более, чем в 130 раз, чем при однократном вычислении в прототипе.
Итак, алгоритмически, способ по п. 1 формулы изобретения предусматривает выполнение следующих операций:
1. На РКП изменяют напряженность поля искомого ИРИ.
2. Разбивают зону электромагнитной доступности РКП на k азимутальных секторов с шириной каждого, не превышающей удвоенную среднюю ошибку определения азимута, используемой для этой цели ЛПАС, задавая предельные значения координат секторов.
3. Задают координаты n ВП, не лежащих на одной прямой с РКП и находящихся от него на расстоянии нескольких угловых минут.
4. Вычисляют напряженности поля на РКП и в каждом ВП от источников излучения, находящихся в каждом из k азимутальных секторов согласно базе данных РКП, используя программу [6] или ей подобную.
5. Устанавливают корреляционную зависимость и калибровочную характеристику пар РКП - ВП между вычисленными напряженностями поля на РКП и в точке размещения каждого из n ВП по всем k азимутальным секторам.
6. По измеренной на РКП напряженности поля искомого ИРИ и корреляционным зависимостям определяют напряженность поля на каждом из n ВП.
7. Вычисляют прямые и обратные отношения напряженностей поля на РКП и ВП во всех комбинациях.
8. Выбирают метод определения координат местоположения искомого ИРИ: метод последовательного приближения, дихотомический (описанный выше) или метод ускоренного спуска, или любой другой.
9. Задают первоначальные координаты местоположении ПТ, как точки возможного местоположения искомого ИРИ.
10. Вычисляют расстояния R1i от i-й точки местоположения ПТ до РКП и расстояния R1i до j-го ВПj.
11. Вычисляют прямые о обратные отношения расстояний во всех комбинациях.
12. Составляют  и
и  мультипликативных уравнений, представляющих произведения разностей попарных отношений расстояний от РКП или ВП до ПТ и соответствующих обратных отношений напряженностей поля, взятых в сочетаниях по два и по три.
мультипликативных уравнений, представляющих произведения разностей попарных отношений расстояний от РКП или ВП до ПТ и соответствующих обратных отношений напряженностей поля, взятых в сочетаниях по два и по три.
13. Вычисляют, в соответствии с выбранным методом, координаты местоположения ПТ, до достижения мультипликативными уравнениями точек экстремума или перегиба, используя в качестве напряженности поля на РКП и ВП значения, полученные в п. 1 и п. 6.
14. Найденные координаты всех точек экстремумов или перегиба мультипликативных функций по всем М2 и М3 сочетаниям корректируют по калибровочным характеристикам пар РКП-ВП.
15. Откалиброванные координаты местоположения искомого ИРИ усредняют по всем М=М2+М3 сочетаниям мультипликативных функций и фиксируют, как окончательные координаты местоположения искомого источника радиоизлучения.
Реализация способа по п. 2 формулы изобретения поясняется фиг. 7, на которой показана азимутальная линия, размещение РКП и ВП, расположенные вокруг него на расстоянии нескольких угловых минут, начальное, одно промежуточное и конечное положение ПТ, а также прямые, связывающие два ВП, выбранные для пояснения принципа работы, с РКП и начальным, промежуточным и конечным положением ПТ. По измеренному азимуту ϕ и координатам местоположения РКП составляют уравнение азимутальной прямой, и ПТ перемещают по ней. Первоначально, задают положение ПТ с максимальным ее удалением от РКП, в соответствии с зоной его электромагнитной доступности. Затем, на азимутальной прямой отыскивают любым методом, в том числе численным методом, например, делением пополам, такое положение ПТ, при котором мультипликативная функция, выражающая в различных сочетаниях по два и по три произведения разностей отношений, подробно описанных выше в п. 1, не достигнет точек экстремума или перегиба. Таким образом, в отличие от п. 1, ПТ перемещают не по всему пространству возможных положений искомого ИРИ, а только по азимутальной прямой  , заданной координатами местоположения РКП и измеренным азимутом ϕ на ИРИ. Такой принцип существенно повышает скорость определения координат искомого ИРИ и. наряду с усреднением по всем возможным сочетаниям М=М2+М3 мультипликативных функций, повышает не только быстродействие, но и точность определения координат.
, заданной координатами местоположения РКП и измеренным азимутом ϕ на ИРИ. Такой принцип существенно повышает скорость определения координат искомого ИРИ и. наряду с усреднением по всем возможным сочетаниям М=М2+М3 мультипликативных функций, повышает не только быстродействие, но и точность определения координат.
Проведенный анализ уровня техники позволяет установить, что аналоги и наиболее близкий из них - прототип, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемого способа определения координат местоположения ИРИ, отсутствуют и, следовательно, заявляемый способ обладает свойством новизны.
Исследование известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показало, что он не следует явным образом из уровня техники, из которого не выявлена также известность влияния преобразований, предусматриваемых существенными признаками заявляемого изобретения, на достижение указанного результата, что позволяет считать заявляемый объект, соответствующим уровню патентоспособности "изобретательский уровень".
Источники информации
1. Сборник материалов курсов повышения квалификации специалистов радиочастотных центров федеральных округов. Книга 2. - СПб.: СПбГУТ. 2003.
2. Липатников В.А., Соломатин А.И., Терентьев А.В. Радиопеленгация. Теория и практика. Спб. ВАС, 2006 г. - 356 с.
3. Разностно-дальномерный способ пеленгования источника радиоизлучения. Патент РФ №2325666 С2. Авторы: Сайбель А.Г., Сидоров П.А.
4. Разнесенный разностно-дальномерный пеленгатор. Патент РФ №2382378, С1. Авторы: Ивасенко А.В., Сайбель А.Г., Хохлов П.Ю.
5. Способ местоопределения источников радиоизлучений. Патент №2248584 С2. Автор(ы): Лузинов В.А. (RU), Устинов К.В. (RU).
6. Проектирование и анализ радиосетей. Описание и инструкция по эксплуатации. Ярославль, 2009.



Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников радиоизлучения (КМПИРИ) УКВ-СВЧ диапазонов как цифровых, так и аналоговых видов связи, сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы). Достигаемый технический результат - определение КМПИРИ одним постом радиоконтроля (РКП) и n, равно или более двух, виртуальных постов (ВП) без применения пеленгаторов и радиоприемников с автокорреляторами. В основе способа лежит энергетический принцип, заключающийся в измерении (или вычислении) напряженности поля ИРИ и в нескольких точках пространства с известными координатами их местоположения. При этом напряженность поля ИРИ на РКП измеряют, а в дополнительной точке (точках) вычисляют. В качестве дополнительной точки в способе предложен виртуальный пост (ВП), координаты которого и параметры его виртуальной антенны (диаграмма направленности и высота подвеса) задаются. При использовании n ВП они «размещаются» не на одной прямой с РКП и «отстоят» от него по широте и (или) по долготе на несколько угловых минут. Вычисление напряженности на ВП основано на принципе корреляционной зависимости (КЗ) напряженностей полей, создаваемых в заданном диапазоне частот множеством источников радиоизлучения, находящихся, согласно базе данных, в зоне электромагнитной доступности РКП и вычисляемых как для РКП, так и для всех заданных ВП по определенной программе. 1 з.п. ф-лы, 7 ил., 2 табл.
1. Однопозиционный мультипликативный разностно-относительный способ определения координат местоположения источников радиоизлучения, основанный на измерении параметров искомого источника радиоизлучений (ИРИ) на одном радиоконтрольном посту (РКП) и вычислении тех же параметров в точках, местоположение которых полагается известным, отличающийся тем, что используют его как для цифровых, так и аналоговых видов связи, и при этом измеряют напряженность поля искомого ИРИ и азимут на него, применяя РКП с логопериодической поворотной антенной системой (ЛПАС), на расстоянии нескольких угловых минут относительно РКП задают координаты местоположения n, более или равно 2, виртуальных постов (ВП), не лежащих с ним на одной прямой, разбивают зону электромагнитной доступности вокруг РКП на k азимутальных секторов, вычисляют напряженность поля в месте расположения n ВП и РКП, создаваемую каждым из источников радиоизлучения заданного диапазона частот, находящихся во всех k азимутальных секторах, устанавливают корреляционную зависимость между напряженностью поля на каждом из n ВП и напряженностью поля на РКП, измеряют на последнем напряженность поля от искомого источника радиоизлучения и по ее величине определяют азимутальные сектора с максимальным коэффициентом корреляции, а следовательно, и величину напряженности поля на соответствующем ВП, а затем осуществляют поиск координат местоположения источника радиоизлучения по всей зоне электромагнитной доступности РКП, для чего: задают координаты местоположения пробной точки (ПТ), как текущего местоположения искомого ИРИ, составляют  и
и  мультипликативных функций, представляющих сочетания, взятые по два и по три, разностей отношений расстояний от ВП к расстоянию РКП до местоположения ПТ, и вычисленных
мультипликативных функций, представляющих сочетания, взятые по два и по три, разностей отношений расстояний от ВП к расстоянию РКП до местоположения ПТ, и вычисленных  парных сочетаний (n+1) обратных отношений напряженностей поля сигналов искомого ИРИ, соответствующих этим расстояниям, а затем равномерно или дихотомически, или методом наискорейшего спуска изменяют значение каждой из координат ПТ при неизменном значении ее другой координаты и находят точки экстремумов или перегиба мультипликативных функций местоположения ПТ, координаты которой по всем М2 и М3 сочетаниям корректируют по калибровочным характеристикам пар РКП-ВП, представляющим зависимости разности вычисленных координат ПТ и истинных координат источников радиоизлучений, известных по соответствующей базе данных, как функцию ошибки определения координат ПТ, а потом усредняют последние и фиксируют после этого уже как окончательные координаты местоположения искомого ИРИ.
парных сочетаний (n+1) обратных отношений напряженностей поля сигналов искомого ИРИ, соответствующих этим расстояниям, а затем равномерно или дихотомически, или методом наискорейшего спуска изменяют значение каждой из координат ПТ при неизменном значении ее другой координаты и находят точки экстремумов или перегиба мультипликативных функций местоположения ПТ, координаты которой по всем М2 и М3 сочетаниям корректируют по калибровочным характеристикам пар РКП-ВП, представляющим зависимости разности вычисленных координат ПТ и истинных координат источников радиоизлучений, известных по соответствующей базе данных, как функцию ошибки определения координат ПТ, а потом усредняют последние и фиксируют после этого уже как окончательные координаты местоположения искомого ИРИ.
2. Способ по п. 1, отличающийся тем, что по измеренному азимуту и координатам местоположения РКП составляют уравнение азимутальной прямой и пробную точку перемещают по ней, а предварительные координаты местоположения пробной точки на этой прямой задают при максимальном расстоянии от РКП в соответствии с зоной его электромагнитной доступности.
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| RU 2014112383 A, 10.10.2015 | |||
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| US 6646602 B2, 11.11.2003 | |||
| EP 1471364 A2, 27.10.2004 | |||
| WO 2004112949 A1, 29.12.2004. | |||

