Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения местоположения источников радиоизлучения УКВ-СВЧ-диапазонов как цифровых, так и аналоговых видов связи, сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы или государственной службы надзора за связью). Изобретение может быть использовано также при поиске местоположения средств радиосвязи, как возможных источников помех связи.
Из известных способов и устройств, близкими аналогами предлагаемого способа по технической сущности и предназначенными для использования при радиоконтроле может быть [1].
Способ [1] основан на приеме сигналов тремя антеннами, образующими две пары измерительных баз, измерении разностей времени прихода сигналов ИРИ и детерминированных вычислений искомых координат.
К недостаткам способа следует отнести:
1) Большое количество антенн.
2) Способ не ориентирован на использование РКП.
3) Измерительные базы для вычисления разности времен прихода сигналов ИРИ парами антенн существенно ограничивают разнос этих антенн, не говоря о нецелесообразности и большой технической сложности реализации способа.
Разнесенный разностно-дальномерный пеленгатор [2], состоящий из двух периферийных пунктов, центрального и системы единого времени. Периферийные пункты предназначены для приема, хранения, обработки сигналов и передачи фрагментов сигналов на ЦП, на котором вычисляется разность времени прихода сигналов. В системе единого времени применяется хронизатор, представляющий привязанный к шкале единого времени хранитель шкалы текущего времени (часы), предназначенный для привязки записываемых в запоминающее устройство значений уровня сигнала к значению времени приема.
Данному пеленгатору свойственны следующие недостатки:
1) Не адаптирован к РКП, используемым в филиалах федеральных округов государственной радиочастотной службы или государственной службы надзора за связью.
2) Большое количество специализированных пеленгационных (но не радиоконтрольных) постов.
3) Необоснованное и не раскрытое (хотя бы до функциональной схемы) применение системы единого времени на ЦП и хронизаторов на 1111, синхронизированных с системой единого времени.
4) Необходимость в наличии радиоканалов с большой пропускной способностью (до 625 Мбод) для передачи даже фрагментов сигналов с ПП1 и ПП2 на ЦП.
5) Для организации радиоканала необходимы радиопередающие устройства и получение разрешения на их работу в определенных условиях эксплуатации.
Известно также техническое решение [3], которое относится к радиолокации, в частности к определению местоположения источников радиоизлучений. Техническим результатом является обеспечение возможности определения координат источников радиоизлучений однопозиционной наземной радиолокационной станцией и независимо от условий местности.
Указанный технический результат достигается также тем, что в радиолокационной станции, содержащей пассивный канал обнаружения, включающий последовательно соединенные антенну и приемник, а также блок вычисления координат, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени и устройство вычисления координат.
Суть предлагаемого способа состоит в следующем.
Для определения координат источника радиоизлучения используют два канала: пассивный и активный каналы обнаружения. Вся система размещена на одной позиции.
Антенна пассивного канала обнаружения направлена на источник и принимает его прямое радиоизлучение. Для измерения дальности до источника радиоизлучения с угловыми координатами  (угол места) и
(угол места) и  (азимут) используется объект, отражающий радиоизлучение этого источника. При этом, с помощью активного канала обнаружения, работающего в пассивном режиме, осуществляются операции поиска, обнаружения и измерения угловых координат (угла места
(азимут) используется объект, отражающий радиоизлучение этого источника. При этом, с помощью активного канала обнаружения, работающего в пассивном режиме, осуществляются операции поиска, обнаружения и измерения угловых координат (угла места  и азимута
и азимута  ) объекта, отражающего излучение, коррелированное с прямым излучением (т.е. осуществляется поиск отражающего объекта). По положению максимума взаимной корреляционной функции излучений, принятых двумя каналами обнаружения, определяют величину временного сдвига Δt этих излучений.
) объекта, отражающего излучение, коррелированное с прямым излучением (т.е. осуществляется поиск отражающего объекта). По положению максимума взаимной корреляционной функции излучений, принятых двумя каналами обнаружения, определяют величину временного сдвига Δt этих излучений.
После чего осуществляется зондирование направления с координатами  и измеряется дальность RO до объекта, при необходимости уточняются координаты
и измеряется дальность RO до объекта, при необходимости уточняются координаты 
Недостатками этого аналога являются:
1. Способ может применяться только к цифровым (дискретным) видам связи.
2. Необходимы два канала: активный и пассивный, что совершенно недопустимо в военных условиях применения из за демаскировния средства.
3. Необходимость измерения сдвига принимаемых сигналов во времени требует системы жесткой синхронизации.
4. Необходимо осуществлять операции поиска, обнаружения и измерения угловых координат (угла места  и азимута
и азимута  ) объекта, отражающего излучение.
) объекта, отражающего излучение.
5. Нет простого способа повышения точности определения координат местоположения ИРИ.
Известен угломерно-корреляционный способ оценивания местоположения наземных источников радиоизлучения [4], принятый за прототип. Угломерно-корреляционный способ оценивания координат местоположения наземных источников радиоизлучения (ИРИ), заключающийся в том, что на борту самолета-пеленгатора одновременно измеряют собственные координаты местоположения x(k), угол курса ψ(k), пеленг ИРИ  отличающийся тем, что бортовая вычислительная система (БВС) осуществляет разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами xц, zц на I×J прямоугольников с координатами центров xi, zi; для каждого прямоугольника и всех точек пеленгации рассчитывают ожидаемые значения пеленгов, затем осуществляют поиск элементарного участка местности возможного местоположения ИРИ, которому соответствует совокупность измеренных значений пеленгов, определяют текущее местоположение ИРИ по величине функционала качества, характеризующего степень соответствия текущей измеренной совокупности пеленгов и их ожидаемых расчетных значений, соответствующих элементарным участкам местности, координаты которых известны, при этом в качестве функционала качества используется экстремум взаимно-корреляционной функции реализации
отличающийся тем, что бортовая вычислительная система (БВС) осуществляет разбиение участка местности вокруг ИРИ с грубо определенными прямоугольными координатами xц, zц на I×J прямоугольников с координатами центров xi, zi; для каждого прямоугольника и всех точек пеленгации рассчитывают ожидаемые значения пеленгов, затем осуществляют поиск элементарного участка местности возможного местоположения ИРИ, которому соответствует совокупность измеренных значений пеленгов, определяют текущее местоположение ИРИ по величине функционала качества, характеризующего степень соответствия текущей измеренной совокупности пеленгов и их ожидаемых расчетных значений, соответствующих элементарным участкам местности, координаты которых известны, при этом в качестве функционала качества используется экстремум взаимно-корреляционной функции реализации  , определяющий совпадение текущего местоположения ИРИ с измеренным элементарным участком местности, координаты которого известны, или взвешенные суммы квадратов разностей текущих измеренных и расчетных значений пеленгов
, определяющий совпадение текущего местоположения ИРИ с измеренным элементарным участком местности, координаты которого известны, или взвешенные суммы квадратов разностей текущих измеренных и расчетных значений пеленгов  , при этом критерием совпадения текущей реализации пеленгов и их расчетных значений является минимум функционала качества
, при этом критерием совпадения текущей реализации пеленгов и их расчетных значений является минимум функционала качества 
Недостатки этого аналога:
1. Способ рассчитан только на применение на борту самолета-пеленгатора,
2. Требуется измерение собственных координат местоположения самолета-пеленгатора,
3. Требуется предварительное грубое определение местоположения ИРИ,
4. Требуется разбиение участка местности вокруг предполагаемого местоположения ИРИ,
5. Ожидаемые значения пеленгов искомого ИРИ зависят от координат местоположения ЛА и его курса и не связаны с параметрами ИРИ.
6. Критерием совпадения текущей реализации азимутов  и их расчетных значений
и их расчетных значений 
 является минимум функционала качества
является минимум функционала качества  который может быть и неразличим на уровне шумов этого функционала.
который может быть и неразличим на уровне шумов этого функционала.
7. Статистика измерения азимутов ограничена по времени нахождения ЛА в зоне возможного местоположения ИРИ и нет простого способа ее увеличения для повышения точности определения координат местоположения ИРИ.
Целью настоящего изобретения является разработка способа, обеспечивающего определение координат местоположения ИРИ УКВ-СВЧ-диапазонов из одного РКП без недостатков, присущих прототипу. Эта цель достигается с помощью признаков, указанных в формуле изобретения, общих с прототипом: однопозиционный угломерно-дальномерный способ определения координат местоположения (КМП) источников радиоизлучения (КМПИРИ), основанный на измерении параметров искомого источника радиоизлучений (ИРИ) на одном радиоконтрольном посту (РКП) и вычислении тех же параметров в точках, местоположение которых полагается известным, отличающийся тем, что, измеряют десятикратно азимут на искомый ИРИ, применяя РКП с логопериодической поворотной антенной системой (ЛПАС), вычисляют среднеквадратическое отклонение азимута от среднего, задают координаты местоположения К виртуальных постов (ВП), на расстоянии нескольких угловых минут от РКП, вокруг азимутального луча с РКП на ИРИ в секторе утроенного среднеквадратического отклонения азимута на ИРИ от среднего его значения, увеличивая расстояния между ВП и приближая их местоположения (МП ВП) к лучу от РКП на ИРИ, по мере удаления от РКП, составляют перечень из q базовых РЭС по базе данных используемого РКП, вычисляют, по координатам МП РКП и каждого МП ВП азимуты на q БРЭС и устанавливают корреляционную зависимость азимутов (КЗА) между МП РКП и МП ВП; составляют для каждого из q БРЭС, в соответствии с теоремой косинусов, для всех  треугольников, образованных точками местоположения q БРЭС, МП РКП и МП ВП, М квадратных уравнений с одним неизвестным, находят (К+1) неизвестных расстояний по К раз от МП РКП и МПВП до каждого из q БРЭС, составляют в соответствии с теоремой косинусов
треугольников, образованных точками местоположения q БРЭС, МП РКП и МП ВП, М квадратных уравнений с одним неизвестным, находят (К+1) неизвестных расстояний по К раз от МП РКП и МПВП до каждого из q БРЭС, составляют в соответствии с теоремой косинусов  квадратных уравнений с одним неизвестным и находят (К+1) неизвестных расстояний по К раз каждое до каждого из q БРЭС, а затем составляют (К+1) уравнений азимутальных лучей по вычисленным с МП РКП и МП ВП азимутам на q БРЭС, и получают 2М значений пар координат для каждого из q БРЭС; после чего создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА) как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; затем составляют, в соответствии с теоремой косинусов, для всех
квадратных уравнений с одним неизвестным и находят (К+1) неизвестных расстояний по К раз каждое до каждого из q БРЭС, а затем составляют (К+1) уравнений азимутальных лучей по вычисленным с МП РКП и МП ВП азимутам на q БРЭС, и получают 2М значений пар координат для каждого из q БРЭС; после чего создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА) как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; затем составляют, в соответствии с теоремой косинусов, для всех  треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, каждый с одним неизвестным, и вычисляют (К+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП и вычисленным с МП ВП азимутам (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют, как окончательные.
треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, каждый с одним неизвестным, и вычисляют (К+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП и вычисленным с МП ВП азимутам (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют, как окончательные.
Заявленный способ поясняется чертежами, на которых:
фиг. 1 показаны расположение РКП, ВП, ИРИ и q БРЭС,
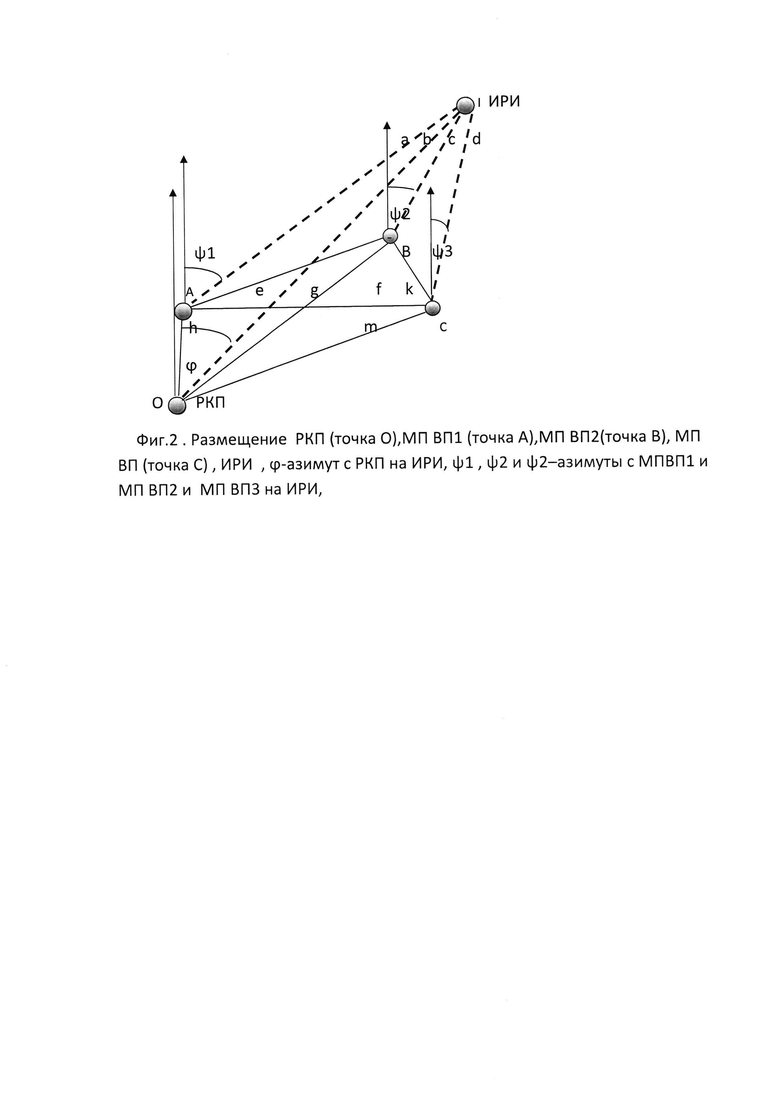
фиг. 2 - расположение РКП, ВП, ИРИ,
фиг. 3 - корреляционной зависимости по азимутам для пары РКП/ВП, пример.
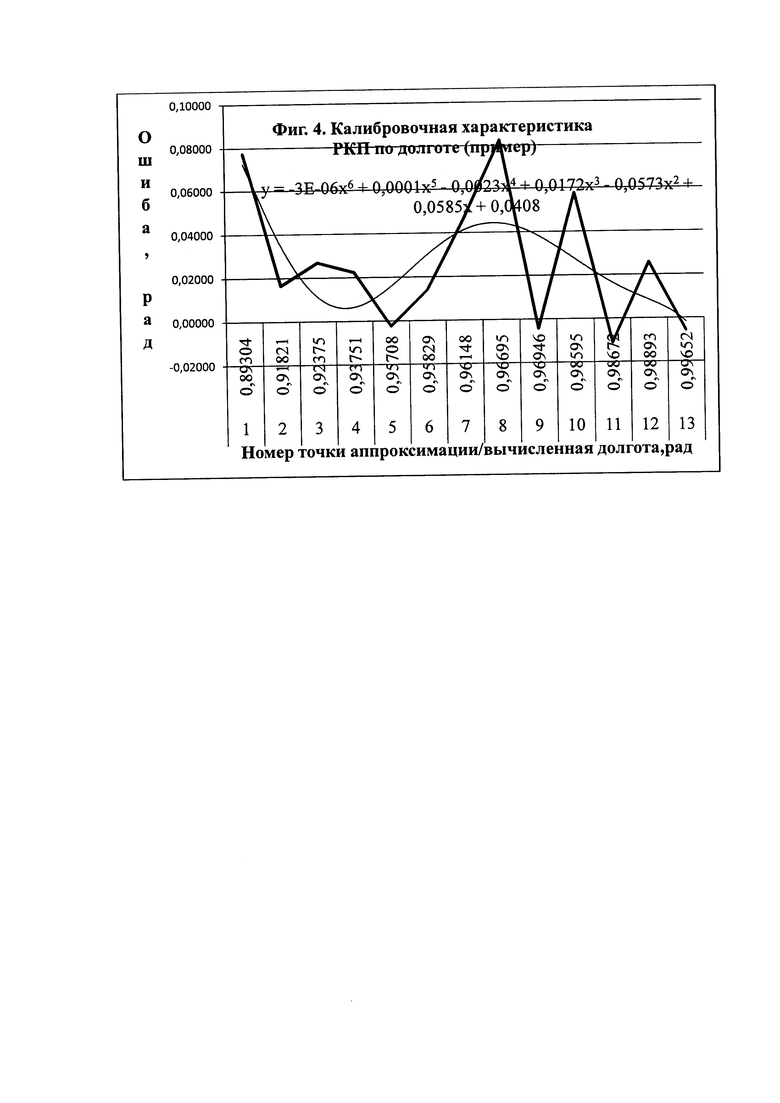
фиг. 4 - калибровочной характеристики по долготе для РКП, пример.
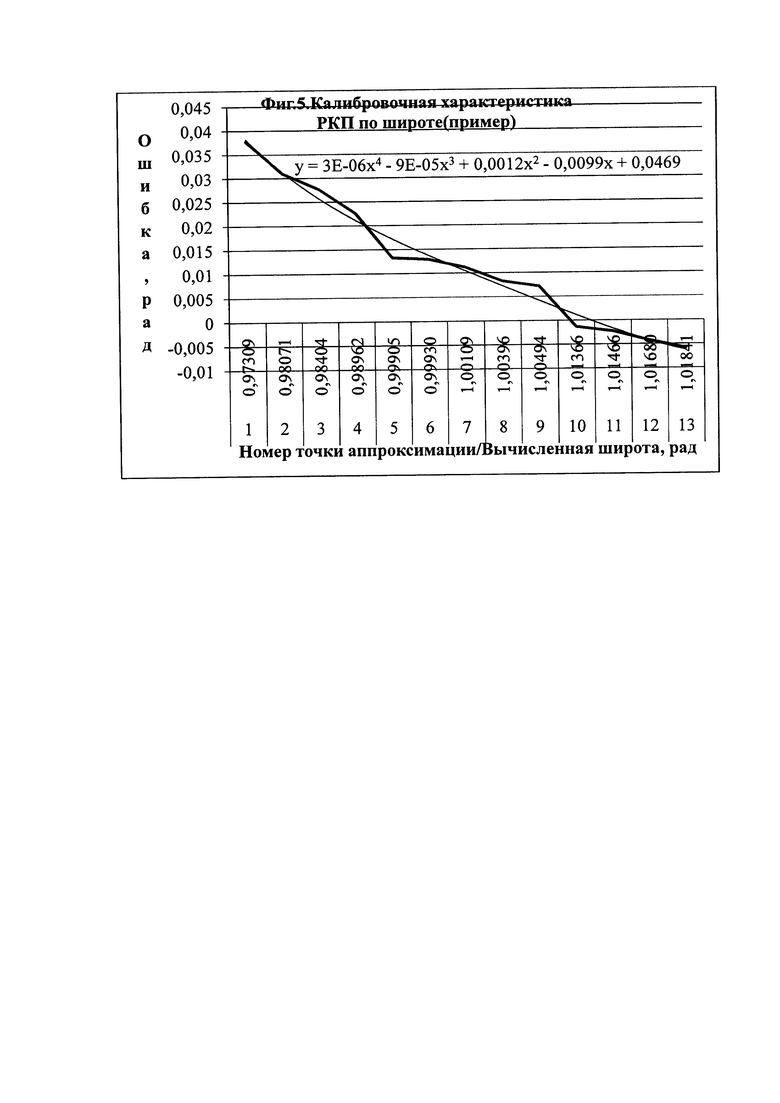
фиг. 5 - калибровочной характеристики по широте для пары РКП, пример.
фиг. 6 - калибровочной характеристики по азимутам для пары РКП, пример.
В основе способа лежит корреляционный принцип, заключающийся в вычислении азимутов с дополнительной(ных) точке(ках) на ИРИ по измеренным (или вычисленным значениям) азимутов с МП РКП на ИРИ. При этом азимут ИРИ на РКП измеряют, а в дополнительной точке(точках) вычисляют. В качестве дополнительной точки в способе предложен виртуальный пост (ВП), координаты которого задаются. При использовании n ВП их размещают не на одной прямой с РКП и удаляют от него на несколько угловых минут с увеличением расстояния между ними и приближением к среднему азимуту на ИРИ по мере удаления от МП РКП. Вычисление азимута на ВП основано на принципе корреляционной зависимости азимутов (КЗА) с МП ВП от азимутов с МП РКП. Корреляционная зависимость азимутов выявляется по результатам расчета азимутов с МП РКП и МП ВП на q базовых РЭС (q БРЭС), расположенных в секторе утроенного среднеквадратического отклонения азимута на ИРИ от среднего его значения (фиг. 1 и фиг. 2).
В качестве примера, на фиг. 3 приведена КЗА азимутов для пары РКП и одним из ВП (РКП/ВП). Поясним переопределение координат БРЭС. Используем для иллюстрации фиг. 1., на которой приведены, для упрощения, только два БРЭС из всего их возможного количества q БРЭС. Рассмотрим все треугольники, образующиеся точкой расположения БРЭС 1 и точками МП ВП и МП РКП. Таких треугольников на фиг. 1 для РКП и трех ВП (К=3) всего 6: ABE, АДЕ, АСЕ, ВДЕ, ВСЕ, ДСЕ. В общем случае, для К виртуальных постов, таких треугольников будет  Переопределение координат МП БРЭС осуществляется в два этапа. На первом этапе составляют, по количеству треугольников, квадратных уравнений с одним неизвестным расстоянием в каждом уравнении и определяют расстояния от МП РКП и МП ВП до каждого из БРЭС. При этом, каждое расстояние будет определено К раз. А затем, на втором этапе, по вычисленным с МП РКП и МП ВП азимутам вычисляют (переопределяют) координаты БРЭС (широту и долготу).
Переопределение координат МП БРЭС осуществляется в два этапа. На первом этапе составляют, по количеству треугольников, квадратных уравнений с одним неизвестным расстоянием в каждом уравнении и определяют расстояния от МП РКП и МП ВП до каждого из БРЭС. При этом, каждое расстояние будет определено К раз. А затем, на втором этапе, по вычисленным с МП РКП и МП ВП азимутам вычисляют (переопределяют) координаты БРЭС (широту и долготу).
Поясним эти этапы на примере. На фиг. 1 рассмотрим три треугольника: ABE, АДЕ, ВСЕ, ВДЕ. Запишем для них, согласно теореме косинусов, три уравнения:  ,
, 

Из (3) получим  .
.
Подставив (4) в (1) и приравняв потом (1) и (2), получим:  . Получили квадратное уравнение относительно одного неизвестного расстояния С. После этого, по уравнениям, составленным по теореме косинусов, определяют и все остальные неизвестные расстояния. Так как каждое неизвестное расстояние по составленным уравнениям вычислятся К раз, то их усредняют. Затем составляют по известным координатам МП РКП: широте (Xa), долготе (Ya) и вычисленному азимуту ψ с него на БРЭС уравнение азимутального луча с МП РКП (Xa, Ya) на БРЭС (X, Y). Его уравнение имеет вид: Y=Ya+(X-Xa) tan ϕ.
. Получили квадратное уравнение относительно одного неизвестного расстояния С. После этого, по уравнениям, составленным по теореме косинусов, определяют и все остальные неизвестные расстояния. Так как каждое неизвестное расстояние по составленным уравнениям вычислятся К раз, то их усредняют. Затем составляют по известным координатам МП РКП: широте (Xa), долготе (Ya) и вычисленному азимуту ψ с него на БРЭС уравнение азимутального луча с МП РКП (Xa, Ya) на БРЭС (X, Y). Его уравнение имеет вид: Y=Ya+(X-Xa) tan ϕ.
Используя это уравнение азимутального луча и зная расстояние Ra, координаты q БРЭС (X, Y) определяют, как: X=Xa+Rasinϕ, Y=Ya+Racosϕ. Те же координаты БРЭС (X, Y) по известным координатам i-го ВП (Xi, Yi) азимутам  c них на БРЭС и вычисленным расстояниям Ri, получают, как:
c них на БРЭС и вычисленным расстояниям Ri, получают, как:  ,
,  . Вычисленные значения широт и долгот местоположения переопределяемого БРЭС сравнивают путем вычитания с истинными по базе данных БРЭС значениями широт и долгот. Получают для МП РКП и каждого МП ВП калибровочные характеристики, как зависимости разности вычисленных и истинных значений широт и долгот каждого из q БРЭС от вычисленных значений их широт и долгот (КХШ и КХД). Эти характеристики используют, в дальнейшем, для корректировки значений определяемых координат искомого ИРИ. Всего будет вычислено К(К+1) пар значений широт и долгот местоположения переопределяемого БРЭС, то есть 2М пар значений его координат. По переопределенным координатам q БРЭС переопределяют и вычисленные азимуты
. Вычисленные значения широт и долгот местоположения переопределяемого БРЭС сравнивают путем вычитания с истинными по базе данных БРЭС значениями широт и долгот. Получают для МП РКП и каждого МП ВП калибровочные характеристики, как зависимости разности вычисленных и истинных значений широт и долгот каждого из q БРЭС от вычисленных значений их широт и долгот (КХШ и КХД). Эти характеристики используют, в дальнейшем, для корректировки значений определяемых координат искомого ИРИ. Всего будет вычислено К(К+1) пар значений широт и долгот местоположения переопределяемого БРЭС, то есть 2М пар значений его координат. По переопределенным координатам q БРЭС переопределяют и вычисленные азимуты  на q БРЭС с МП РКП и каждого МП ВП, как:
на q БРЭС с МП РКП и каждого МП ВП, как:
 . По разностям вычисленных азимутов по базе данных и переопределенных азимутов
. По разностям вычисленных азимутов по базе данных и переопределенных азимутов  для каждого из БРЭС формируют калибровочные характеристики по азимутам (КХА) как для МП РКП, так и для каждого МП ВП.
для каждого из БРЭС формируют калибровочные характеристики по азимутам (КХА) как для МП РКП, так и для каждого МП ВП.
Затем измеряют азимут на искомый ИРИ и по полученным КЗА пары РКП/ВП и находят азимуты на ИРИ с каждого МП ВП. По составленным выше М квадратным уравнениям, для такого же количества треугольников, определяют расстояния от МП РКП и МП ВП до искомого ИРИ, аналогично описанной выше процедуре в отношении БРЭС. А потом, по измеренному с МП РКП на ИРИ азимуту  и азимутам с МП ВП на ИРИ, полученным и с пользованием КЗА и КХА, определяют и КМП ИРИ - широту и долготу его местоположения. Определенные при этом значения широт и долгот ИРИ корректируются по полученным ранее соответствующим КЗШ и КЗД. Всего будет вычислено и откорректировано К(К+1) пар значений широт и долгот местоположения искомого ИРИ, то есть 2М пар значений его координат.
и азимутам с МП ВП на ИРИ, полученным и с пользованием КЗА и КХА, определяют и КМП ИРИ - широту и долготу его местоположения. Определенные при этом значения широт и долгот ИРИ корректируются по полученным ранее соответствующим КЗШ и КЗД. Всего будет вычислено и откорректировано К(К+1) пар значений широт и долгот местоположения искомого ИРИ, то есть 2М пар значений его координат.
Еще раз опишем алгоритм способа по пунктам:
1. По координатам РКП (Xa, Ya) формируют координаты нескольких ВП, не лежащих на одной прямой с РКП и отличающиеся от его координат (Xa, Ya) на несколько угловых минут.
2. Используя базу данных радиоэлектронных средств (БД РЭС) РКП, определяют q базовых передающих РЭС (q БРЭС).
3. По БД РЭС и координатам МП РКП (Xa, Ya) вычисляют азимуты с МП  и МП ВП1 на q
и МП ВП1 на q  .
.
4. Составляют, по количеству треугольников, образованных точками с координатами МП РКП, МП ВП и q БРЭС,
 квадратных уравнений,
квадратных уравнений,
с одним неизвестным расстоянием в каждом, и по ним определяют расстояния от МП РКП и МП ВП до каждого из q БРЭС.
5. По вычисленным значениям азимутов устанавливают корреляционную зависимость азимутов (КЗА) с МП РКП  на q БРЭС и азимутами
на q БРЭС и азимутами  с МП ВПi на q БРЭС.
с МП ВПi на q БРЭС.
6. По вычисленным значениям азимутов составляют уравнения азимутальных лучей, по которым, используя вычисленные в п. 4 расстояния, определяют (переопределяют) координаты местоположения каждого из q БРЭС.
7. По переопределенным координатам для q БРЭС и координатам МП РКП и МП ВП вычисляют переопределенные азимуты на МП РКП -  и МП ВП -
и МП ВП -  .
.
8. По переопределенным координатам для q БРЭС и азимутам и их истинным значениям (по базе данных) получают калибровочные характеристики для МП РКП и каждого из МП ВП (КХШ, КХД), как зависимости ошибки определения координаты и азимутов (КХА) от вычисленного из значения.
9. Измеряют азимут ϕ с МП РКП на ИРИ и формируют уравнение азимутального луча с РКП на ИРИ.
10. По КЗА определяют азимуты с МП ВП на ИРИ.
11. Формируют уравнения азимутальных лучей с МП РКП и МП ВП на ИРИ.
12. Определяют расстояния от МП РКП и МП ВП до ИРИ, выполняя п. 4 в отношении ИРИ.
13. По уравнениям азимутальных лучей, значениям азимутов с МП РКП и МП ВП на ИРИ и, найденным в п. 11 расстояниям, вычисляют КМП ИРИ (широту и долготу).
14. Определенные, при этом, значения широт и долгот ИРИ корректируются по полученным ранее соответствующим КЗШ и КЗД. Всего будет вычислено и откорректировано К(К+1) пар значений широт и долгот местоположения искомого ИРИ, то есть 2М пар значений его координат.
15. Откорректированные 2М значений КМП ИРИ усредняют и затем фиксируют, как окончательные.
В заявленном способе устранены все недостатки прототипа. Для пояснения возможностей способа приведем расчетное количество статистики для усреднения и повышения точности определения как по расстоянию от РКП до ИРИ, так и по координатам местоположения КОРИ. Расчет приведен для различного количества ВП, от трех до десяти, и представлен в таблице:
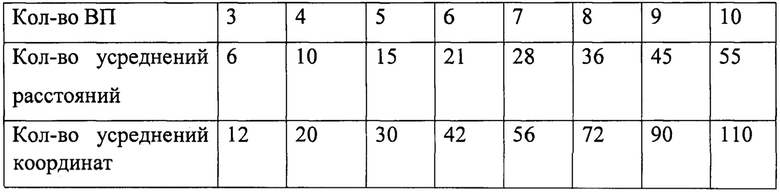
Предложенный способ является универсальным для определения координат местоположения источников радиоизлучения (КМПИРИ) УКВ-СВЧ-диапазонов как цифровых, так и аналоговых видов связи. Способ является универсальным не только по видам связи, но и по расположению искомых ИРИ - на поверхности Земли или в пространстве (виртуальные посты могут размещаться и в пространстве). Используется сканирующий радиоприемник с логопериодической поворотной антенной системой. Способ не требует затрат на дополнительное оборудование, например, в виде радиоприемного устройства с автокоррелятором и пеленгатора. За счет применения виртуальных постов достигается без каких-либо затрат большая статистическая база, позволяющая повысить точность определения координат местоположения ИРИ.
Проведенный анализ уровня техники позволяет установить, что аналоги и наиболее близкий из них - прототип, характеризующиеся совокупностью признаков, тождественных всем признакам заявляемого способа определения координат местоположения ИРИ, отсутствуют и, следовательно, заявляемый способ обладает свойством новизны.
Исследование известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого способа, показало, что он не следует явным образом из уровня техники, из которого не выявлена также известность влияния преобразований, предусматриваемых существенными признаками заявляемого изобретения, на достижение указанного результата, что позволяет считать заявляемый объект соответствующим уровню патентоспособности "изобретательский уровень".
Источники информации
1. Разностно-дальномерный способ пеленгования источника радиоизлучения. Патент РФ №2325666 С2. Авторы: Сайбель А.Г., Сидоров П.А.
2. Разнесенный разностно-дальномерный пеленгатор. Патент РФ №2382378, С1. Авторы: Ивасенко А.В., Сайбель А.Г., Хохлов П.Ю.
3. Способ определения координат источника радиоизлучения и радиолокационная станция для его реализации. Патент РФ №2217773. Автор(ы): Беляев Б.Г., Голубев Г.Н., Жибинов В.А., Кисляков В.И., Лужных С.Н.
4. Угломерно-корреляционный способ оценивания координат местоположения наземных источников радиоизлучения. Патент РФ №2458358.



Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения координат местоположения источников радиоизлучения (КМПИРИ) УКВ-СВЧ диапазонов как цифровых, так и аналоговых видов связи, сведения о которых отсутствуют в базе данных (например, государственной радиочастотной службы). Техническим результатом является определение КМПИРИ одним постом радиоконтроля (РКП). В основе способа лежит корреляционный принцип, заключающийся в вычислении азимутов с дополнительной(ных) точке(ках) на ИРИ по измеренным (или вычисленным значениям) азимутов с МП РКП на ИРИ. При этом азимут ИРИ на РКП измеряют, а в дополнительной(ных) точке(ках) вычисляют. В качестве дополнительной точки в способе предложен виртуальный пост (ВП), координаты которого задаются. При использовании n ВП их размещают не на одной прямой с РКП, а относят от него на несколько угловых минут с увеличением расстояния между ними и приближением к среднему азимуту на ИРИ по мере удаления от МП РКП. Вычисление азимута на ВП основано на принципе корреляционной зависимости азимутов (КЗА) с МП ВП от азимутов с МП РКП. Корреляционную зависимость азимутов (КЗА) получают по результатам расчета азимутов с МП РКП и МП ВП на q базовых РЭС (q БРЭС), расположенных в секторе утроенного среднеквадратического отклонения азимута на ИРИ от среднего его значения. Для получения КЗА производят повторное определение (переопределение) известных координат МП q БРЭС, которое выполняют в два этапа. На первом этапе составляют  квадратных уравнений с одним неизвестным расстоянием, равных количеству треугольников, образованных точками местоположения q БРЭС, МП РКП и МП ВП, и определяют расстояния от МП РКП и МП ВП до каждого из q БРЭС. При этом каждое расстояние будет определено К раз. На втором этапе по вычисленным с МП РКП и МП ВП азимутам вычисляют (переопределяют) координаты q БРЭС (широту и долготу). Для этого составляют (К+1) уравнений азимутальных лучей, по вычисленным с МП РКП и МП ВП азимутам на q БРЭС и вычисленным расстояниям получают 2М значений пар координат для каждого из q БРЭС. Затем создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА) как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; составляют, в соответствии с теоремой косинусов, для всех М треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, и вычисляют (К+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП, и вычисленным с МП ВП азимутам, (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют как окончательные. 6 ил., 1 табл.
квадратных уравнений с одним неизвестным расстоянием, равных количеству треугольников, образованных точками местоположения q БРЭС, МП РКП и МП ВП, и определяют расстояния от МП РКП и МП ВП до каждого из q БРЭС. При этом каждое расстояние будет определено К раз. На втором этапе по вычисленным с МП РКП и МП ВП азимутам вычисляют (переопределяют) координаты q БРЭС (широту и долготу). Для этого составляют (К+1) уравнений азимутальных лучей, по вычисленным с МП РКП и МП ВП азимутам на q БРЭС и вычисленным расстояниям получают 2М значений пар координат для каждого из q БРЭС. Затем создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА) как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; составляют, в соответствии с теоремой косинусов, для всех М треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, и вычисляют (К+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП, и вычисленным с МП ВП азимутам, (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют как окончательные. 6 ил., 1 табл.
Однопозиционный угломерно-дальномерный способ определения координат местоположения (КМП) источников радиоизлучения (КМПИРИ), основанный на измерении параметров искомого источника радиоизлучений (ИРИ) на одном радиоконтрольном посту (РКП) и вычислении тех же параметров в точках, местоположение которых полагается известным, отличающийся тем, что измеряют десятикратно азимут на искомый ИРИ, применяя РКП с логопериодической поворотной антенной системой (ЛПАС), вычисляют среднеквадратическое отклонение азимута от среднего, задают координаты местоположения К виртуальных постов (ВП), на расстоянии нескольких угловых минут от РКП, вокруг азимутального луча с РКП на ИРИ в секторе утроенного среднеквадратического отклонения азимута на ИРИ от среднего его значения, увеличивая расстояния между ВП и приближая их местоположения (МП ВП) к лучу от РКП на ИРИ, по мере удаления от РКП, составляют перечень из q базовых радиоэлектронных средств (q БРЭС), представляющих собой источники радиоизлучения, согласно базе данных находящиеся в зоне электромагнитной доступности используемого РКП вычисляют, по координатам МП РКП и каждого МП ВП, азимуты на q БРЭС и устанавливают корреляционную зависимость азимутов (КЗА) между МП РКП и МП ВП; составляют для каждого из q БРЭС, в соответствии с теоремой косинусов, для всех  треугольников, образованных точками местоположения q БРЭC, МП РКП и МП ВП, М квадратных уравнений с одним неизвестным, находят (К+1) неизвестных расстояний по К раз от МП РКП и МПВП до каждого из q БРЭС, составляют в соответствии с теоремой косинусов квадратных уравнений с одним неизвестным и находят (К+1) неизвестных расстояний по К раз каждое до каждого из q БРЭС, а затем составляют (К+1) уравнений азимутальных лучей, по вычисленным с МП РКП и МП ВП азимутам на q БРЭС, и получают 2М значений пар координат для каждого из q БРЭС; после чего создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА), как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; затем составляют в соответствии с теоремой косинусов, для всех треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, каждый с одним неизвестным и вычисляют (K+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП и вычисленным с МП ВП азимутам, (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют как окончательные.
треугольников, образованных точками местоположения q БРЭC, МП РКП и МП ВП, М квадратных уравнений с одним неизвестным, находят (К+1) неизвестных расстояний по К раз от МП РКП и МПВП до каждого из q БРЭС, составляют в соответствии с теоремой косинусов квадратных уравнений с одним неизвестным и находят (К+1) неизвестных расстояний по К раз каждое до каждого из q БРЭС, а затем составляют (К+1) уравнений азимутальных лучей, по вычисленным с МП РКП и МП ВП азимутам на q БРЭС, и получают 2М значений пар координат для каждого из q БРЭС; после чего создают (К+1) калибровочных характеристик (КХ) для МП РКП и МП ВП по широте (КХШ), долготе (КХД) и азимуту (КХА), как зависимости разности истинных и вычисленных значений широт, долгот и азимутов от соответствующих вычисленных значений широт, долгот и азимутов; вычисляют азимуты с каждого МП ВП на ИРИ, используя КЗА, КХА и среднее значение измеренного с МП РКП на ИРИ азимута ϕ; затем составляют в соответствии с теоремой косинусов, для всех треугольников, образованных точкой местоположения ИРИ, МПРКП и МП ВП, М квадратных уравнений, каждый с одним неизвестным и вычисляют (K+1) неизвестных расстояний от МП РКП и МП ВП до МП ИРИ по К раз каждое; составляют, по среднему значению азимута ϕ с РКП и вычисленным с МП ВП азимутам, (К+1) уравнений азимутальных лучей от них на ИРИ, определяют 2М предварительных значений КМП ИРИ, корректируют их по своим КХШ и КХД, усредняют, а затем фиксируют как окончательные.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217773C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2453997C1 |
| US 5625364 A, 29.04.1997 | |||
| US 6791493 B1, 14.09.2004 | |||
| WO 2009065943 A1, 28.05.2009. | |||

