Перекрестные ссылки на родственные заявки
[0001] Эта заявка заявляет преимущество предварительной патентной заявки США порядковый номер 61/717761, поданной 24 октября 2012 года и озаглавленной "Locomotion System and Apparatus", которая, таким образом, включена в данный документ посредством ссылки во всей своей полноте. Эта заявка также заявляет преимущество предварительной патентной заявки США порядковый номер 61/757986, поданной 29 января 2013 года и озаглавленной "Locomotion System and Apparatus", которая, таким образом, включена в данный документ посредством ссылки во всей своей полноте.
ЗАЯВЛЕНИЕ О ФИНАНСИРОВАНИИ НИОКР ИЗ ФЕДЕРАЛЬНОГО БЮДЖЕТА
[0002] Недоступно.
Уровень техники
[0003] Изобретение, в общем, относится к локомоционным устройствам, которые могут быть использованы в сочетании с системами виртуальной реальности.
[0004] В окружении виртуальной реальности пользователи типично желают иметь возможность свободно ходить. В частности, способность физически ходить или бегать в реальном окружении и возможность передавать это движение в виртуальное окружение значительно увеличивают уровень погружения пользователя в виртуальное окружение. Однако движение в реальном мире зачастую ограничено физическими пространственными ограничениями (например, размером комнаты, в которой пользователь находится). Соответственно, локомоционные устройства предназначены, чтобы обеспечивать пользователю ощущение свободной ходьбы, в то же время ограничивая пользователя конкретным местоположением. Например, многие локомоционные устройства предоставляют возможность пользователю ходить свободно, на 360 градусов, на платформе, имеющей конечный размер, никогда не покидая платформу.
[0005] Традиционные локомоционные устройства включают в себя моторизованные и немоторизованные конструкции, которые могут быть использованы в сочетании с окружениями виртуальной реальности во множестве приложений, включающих в себя, но не только, игры. Примеры приложений кроме игр включают в себя тренировку специалистов; боевую подготовку; физическую терапию; физическую зарядку; виртуальные рабочие окружения; виртуальные переговорные (как для профессиональных, так и персональных целей); спортивную симуляцию и тренировку; и виртуальный туризм, концерты и события.
[0006] Моторизованные локомоционные устройства типично используют датчики, чтобы обнаруживать движение пользователя и отправлять сигнал обратной связи моторам, приводящим ремни или ролики, по которым пользователь движется. Ремни или ролики приводятся в действие навстречу движениям пользователя и приводят пользователя обратно в центральный фрагмент платформы после каждого шага. Существует множество недостатков в моторизованных локомоционных устройствах. Например, моторизованные локомоционные устройства обычно являются сложными и дорогостоящими вследствие вращающихся и моторизованных компонентов, датчиков, блоков обработки и контуров обратной связи. Кроме того, сложные алгоритмы требуются для вращающихся и моторизованных компонентов, чтобы правильно противодействовать движениям пользователя. Неточная обратная связь с электромотором может приводить в результате к ошибочным движениям ремней или роликов, которые могут заставить пользователя потерять равновесие или сместить его от центра платформы. Также могут быть проблемы с задержкой обратной связи и реакцией, когда пользователь ускоряется, вызывая некорректные движения или реакции, которые являются слишком медленными, потенциально предоставляя возможность пользователю сходить с платформы. Дополнительно, поскольку ответные движения ремней или роликов противодействуют движениям пользователя, пользователь может быть склонен к потере равновесия и спотыканию.
[0007] В дополнение к проблемам с работой моторизованных локомоционных устройств такие устройства обычно являются большими и громоздкими и, таким образом, не помещаются в среднего размера жилой комнате (например, игровой комнате, гостиной или спальне), и может быть затруднительным разделить их на модульные части для транспортировки и хранения. Устройства являются непременно большими, чтобы предохранять пользователя от выхода за пределы платформы, прежде чем будет обработана корректная реакция системы; таким образом, воспроизведение устройств не подходит для домашнего использования потребителем.
[0008] Немоторизованные локомоционные устройства не имеют моторизованных компонентов и полагаются на движение пользователя и/или силу тяжести, чтобы приводить пользователя обратно в центр платформы после каждого шага. Всенаправленные шарикоподшипниковые платформы, например, имеют сотни шариковых подшипников, которые предоставляют возможность пользователю идти на месте, в то время как ограничитель вокруг талии пользователя удерживает пользователя на месте. Основной проблемой с всенаправленными шарикоподшипниковыми платформами является то, что пользователь не испытывает естественной походки с перемещением нагрузки с пятки на носок, а испытывает скорее неустойчивость, аналогичную неустойчивости ходьбы по льду. Неустойчивость приводит в результате к шарканью ступней, где ни пятка, ни носок не отрываются от устройства, что приводит в результате к неестественной манере ходьбы, которая снижает погружение пользователя в виртуальное окружение. Кроме того, эти устройства являются типично тяжелыми и дорогостоящими вследствие множества вращающихся компонентов.
[0009] Другим немоторизованным локомоционным устройством является устройство в виде подставки с гладкой, обращенной вверх вогнутой поверхностью. Пользователь типично носит специальную обувь и тогда "идет" по скользкой вогнутой поверхности, циклически скользя своими ступнями назад и вперед, в то время как его/ее тело остается, главным образом, в центре устройства. Хотя устройства в виде подставки являются относительно простыми, небольшими и могут помещаться в жилой комнате, существует несколько недостатков. Во-первых, пользователь испытывает не естественную походку с перемещением нагрузки с пятки на носок, а скорее неустойчивость типа неустойчивости ходьбы по льду вследствие свойств малого трения вогнутой поверхности и специальной обуви, которая не имеют каких-либо стабилизирующих ступню элементов. Таким образом, пользователю приходится шаркать своими ступнями, чтобы помогать поддерживать устойчивость в противоположность применению естественного шагающего движения. Дополнительно, не существует механизма безопасности или устройства, чтобы не допускать падения пользователя во время использования.
[0010] Другим немоторизованным локомоционным устройством является большой полый сферический шар приблизительно 10 футов в диаметре. Пользователь входит в шар через съемную панель и идет в шаре, когда шар вращается вокруг своего центра относительно окружающей обстановки. Шарообразное устройство также имеет несколько проблем. Во-первых, трудно и неестественно начинать и прекращать движение шара, что может приводить в результате к неустойчивости пользователя. Дополнительно, поскольку размер шара непременно ограничен, область ходьбы не является плоской, что также приводит в результате к менее естественному восприятию ходьбы. В дополнение к тому, что шарообразное устройство является слишком большим, чтобы помещаться в жилой комнате, такие коммерчески доступные шары также непомерно дороги для частных потребителей.
[0011] Соответственно, остается необходимость в локомоционных устройствах, которые предоставляют возможность пользователям безопасно осуществлять доступ к виртуальным окружениям приватно из дома пользователя и в то же время обеспечивают ощущение более естественной манеры ходьбы.
Сущность изобретения
[0012] Варианты осуществления, описанные в данном документе, в целом направлены на локомоционную систему для использования с технологией виртуального окружения, содержащую платформу, сконфигурированную, чтобы поддерживать пользователя, узел поддержки со страховочным поясом, соединенный с платформой и протягивающийся вверх от платформы, при этом узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси, и страховочный пояс, сконфигурированный, чтобы одеваться на пользователя. Страховочный пояс включает в себя структуру сопряжения, подвижно соединенную с гало-опорой.
[0013] В варианте осуществления локомоционная система для использования с технологией виртуального окружения содержит платформу, сконфигурированную, чтобы поддерживать пользователя, узел поддержки со страховочным поясом, соединенный с платформой и протягивающийся вверх от платформы, при этом узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси, и страховочный пояс, включающий в себя ремень, сконфигурированный, чтобы одеваться на пользователя, структуру сопряжения, соединенную с ремнем, и вертикальный элемент, соединенный с ремнем. Структура сопряжения скользящим образом зацепляет верхнюю поверхность гало-опоры, а вертикальный элемент расположен в гало-опоре и сконфигурирован, чтобы ограничивать радиальное перемещение структуры сопряжения относительно гало-опоры.
[0014] В варианте осуществления система виртуальной реальности содержит локомоционную систему, включающую в себя платформу, сконфигурированную, чтобы поддерживать пользователя, узел поддержки со страховочным поясом, соединенный с платформой, и страховочный пояс, сконфигурированный, чтобы одеваться на пользователя. Узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси, и при этом страховочный пояс сконфигурирован, чтобы двигаться относительно гало-опоры. Система виртуальной реальности дополнительно содержит блок обработки, устройство обнаружения движения, осуществляющее связь с блоком обработки и сконфигурированное, чтобы обнаруживать и отслеживать движение пользователя, визуальный дисплей, осуществляющий связь с блоком обработки и контроллер, сконфигурированный, чтобы удерживаться пользователем.
[0015] Варианты осуществления, описанные в данном документе, содержат комбинацию признаков и преимуществ, предназначенных, чтобы устранять различные недостатки, ассоциированные с некоторыми предшествующими устройствами, системами и способами. Вышеприведенное описание скорее широко очерчивает признаки и технические преимущества изобретения для того, чтобы последующее подробное описание изобретения могло быть лучше понято. Различные характеристики, описанные выше, а также другие признаки, будут легко поняты специалистами в данной области техники при прочтении последующего подробного описания и посредством обращения к сопровождающим чертежам. Специалистам в данной области техники следует понимать, что концепция и конкретные раскрытые варианты осуществления могут быть легко реализованы как основа для модификации или проектирования других структур для осуществления тех же целей изобретения. Специалисты в данной области техники также должны осознавать, что такие эквивалентные структуры не отступают от сущности и объема изобретения, как указано в прилагаемой формуле изобретения.
Краткое описание чертежей
[0016] Для подробного описания предпочтительных вариантов осуществления изобретения сейчас будут рассматриваться сопровождающие чертежи, на которых:
[0017] Фиг. 1 – это вид сверху варианта осуществления локомоционной системы в соответствии с принципами, описанными в данном документе;
[0018] Фиг. 2 – это перспективный покомпонентный вид локомоционной платформы на Фиг. 1;
[0019] Фиг. 3A – это перспективный вид секции локомоционной платформы на Фиг. 1;
[0020] Фиг. 3B – это перспективный вид секции локомоционной платформы на Фиг. 1;
[0021] Фиг. 4A – это вид сбоку секции локомоционной платформы на Фиг. 1;
[0022] Фиг. 4B – это вид сбоку альтернативного варианта осуществления секции локомоционной платформы в соответствии с принципами, описанными в данном документе;
[0023] Фиг. 5A – это вид сбоку в разрезе каналов и ребер, протягивающихся вдоль верхней поверхности секции на Фиг. 3A;
[0024] Фиг. 5B-5D – это виды сбоку в разрезе альтернативных вариантов осуществления каналов и ребер, которые могут быть предусмотрены на верхней поверхности секций локомоционных платформ в соответствии с принципами, описанными в данном документе;
[0025] Фиг. 6A – это вид сбоку варианта осуществления устройства безопасности в соответствии с принципами, описанными в данном документе, для использования с локомоционной платформой на Фиг. 1;
[0026] Фиг. 6B – это вид сверху устройства безопасности на Фиг. 6A;
[0027] Фиг. 7 – это перспективный вид варианта осуществления оболочки для ступни в соответствии с принципами, описанными в данном документе, для использования с локомоционной платформой на Фиг. 1;
[0028] Фиг. 8 – это вид снизу оболочки для ступни на Фиг. 7;
[0029] Фиг. 9 – это перспективный вид оболочки ступни на Фиг. 7 и фрагмента локомоционной платформы на Фиг. 1;
[0030] Фиг. 10 – это перспективный вид варианта осуществления локомоционной системы в соответствии с принципами, описанными в данном документе;
[0031] Фиг. 11 – это перспективный вид центральной зоны и секции локомоционной платформы на Фиг. 31;
[0032] Фиг. 12A – это перспективный вид секции локомоционной платформы на Фиг. 31;
[0033] Фиг. 12B – это перспективный вид сзади секции локомоционной платформы на Фиг. 31;
[0034] Фиг. 13A – это вид сбоку секции локомоционной платформы на Фиг. 31;
[0035] Фиг. 13B – это вид сбоку альтернативного варианта осуществления секции локомоционной платформы в соответствии с принципами, описанными в данном документе;
[0036] Фиг. 14 – это вид сверху структуры соединения платформы и основания локомоционной платформы на Фиг. 31;
[0037] Фиг. 15 – это перспективный вид фрагмента структуры соединения платформы на Фиг. 35;
[0038] Фиг. 16 – это перспективный частичный вид структуры соединения платформы на Фиг. 35;
[0039] Фиг. 17A – это перспективный частичный вид локомоционной платформы на Фиг. 31;
[0040] Фиг. 17B – это увеличенный перспективный частичный вид локомоционной платформы на Фиг. 38A;
[0041] Фиг. 18 – это перспективный вид фрагмента основания на Фиг. 35;
[0042] Фиг. 19 – это вид сверху системы на Фиг. 31;
[0043] Фиг. 20 – это увеличенный перспективный вид опорного кольца локомоционной системы на Фиг. 31;
[0044] Фиг. 21 – это перспективный частичный вид опорного кольца на Фиг. 41;
[0045] Фиг. 22 – это перспективный вид страховочного пояса локомоционной системы на Фиг. 31;
[0046] Фиг. 23 – это перспективный вид варианта осуществления оболочки ступни в соответствии с принципами, описанными в данном документе, для использования с вариантами осуществления локомоционных платформ, описанных в данном документе;
[0047] Фиг. 24 – это схематичный вид системы виртуальной реальности для использования с локомоционной системой на Фиг. 31;
[0048] Фиг. 25 – это схематичный вид варианта осуществления опорной структуры со страховочным поясом и локомоционной системы в соответствии с принципами, описанными в данном документе;
[0049] Фиг. 26 – это схематичный вид варианта осуществления опорной структуры со страховочным поясом и локомоционной системы в соответствии с принципами, описанными в данном документе;
[0050] Фиг. 27 – это схематичный вид варианта осуществления опорной структуры со страховочным поясом в соответствии с принципами, описанными в данном документе, для использования с локомоционными системами, описанными в данном документе;
[0051] Фиг. 28 – это схематичный вид варианта осуществления страховочного пояса в соответствии с принципами, описанными в данном документе, для использования с локомоционными системами, описанными в данном документе;
[0052] Фиг. 29A-29Q – это схематичные виды в разрезе различных вариантов осуществления страховочного пояса и опорного кольца в соответствии с принципами, описанными в данном документе, для использования с локомоционными системами, описанными в данном документе;
[0053] Фиг. 30 – это схематичный вид сверху варианта осуществления страховочного пояса в соответствии с принципами, описанными в данном документе, для использования с локомоционными системами, описанными в данном документе;
[0054] Фиг. 31 – это схематичный вид сбоку в разрезе варианта осуществления страховочного пояса и опорного кольца в соответствии с принципами, описанными в данном документе, для использования с локомоционными системами, описанными в данном документе.
Осуществление изобретения
[0055] Последующее обсуждение направлено на различные примерные варианты осуществления. Однако специалист в данной области техники поймет, что примеры, раскрытые в данном документе, имеют широкое применение, и что обсуждение какого-либо варианта осуществления предназначено только для того, чтобы служить примером этого варианта осуществления и не предназначено, чтобы предполагать, что рамки изобретения, включающие в себя формулу изобретения, ограничены этим вариантом осуществления.
[0056] Некоторые термины используются по всему последующему описанию и формуле изобретения, чтобы ссылаться на конкретные признаки или компоненты. Как будет принято во внимание специалистом в данной области техники, различные люди могут упоминать одинаковый признак или компонент посредством различных названий. Этот документ не предназначен, чтобы делать различие между компонентами или признаками, которые отличаются по названию, но не по функции. Чертежи не обязательно нарисованы в масштабе. Определенные признаки и компоненты в данном документе могут показываться в большем масштабе или до некоторой степени в схематической форме, и некоторые подробности традиционных элементов могут не показываться в интересах ясности и краткости.
[0057] В последующем обсуждении и в формуле изобретения термины "включающий в себя" и "содержащий" используются ничем не ограниченным образом, и, таким образом, должны интерпретироваться, чтобы означать "включающий в себя, но не только...". Также термин "соединять" или "соединяет" предназначен, чтобы означать либо непрямое, либо прямое соединение. Таким образом, если первое устройство соединяется со вторым устройством, это соединение может быть через прямое соединение или через непрямое соединение через другие устройства, компоненты и соединения. В качестве другого примера два компонента, которые касаются друг друга или скользящим образом зацепляют друг друга, будут соединены. Кроме того, как используется в данном документе, термины "осевой" и "в осевом направлении", как правило, означают вдоль или параллельно центральной оси (например, центральной оси тела или отверстия), в то время как термины "радиальный" и "радиально", как правило, означают перпендикулярно центральной оси. Например, осевое расстояние относится к расстоянию, измеренному вдоль или параллельно центральной оси, а радиальное расстояние означает расстояние, измеренное перпендикулярно центральной оси.
[0058] Локомоционное устройство и система, раскрытые в данном документе, применяют платформу, модуль безопасности и оболочки для ступней с переменным коэффициентом трения, которые предназначены, чтобы устранять некоторые недостатки, ассоциированные с предыдущими локомоционными устройствами. Локомоционное устройство предоставляет возможность пользователю использовать свою естественную походку, в то же время пользуясь свободой перемещения в физическом мире, которое транслируется в движение в виртуальном окружении.
[0059] Обращаясь сейчас к Фиг. 1, показан вариант осуществления локомоционной системы 10 в соответствии с принципами, описанными в данном документе. В этом варианте осуществления локомоционная система 10 включает в себя основание или платформу 100, модуль 200 безопасности, соединенный с платформой 100, и туфли или оболочки 300 для ступней с переменным коэффициентом трения. Как будет описано более подробно ниже, пользователь системы 10 стоит и движется на платформе 100 с помощью туфель 300, в то время как модуль 200 безопасности предоставляет средство, чтобы защищать пользователя во время использования системы 100.
[0060] Обращаясь теперь к Фиг. 2 и 3A, в этом варианте осуществления платформа 100 имеет вертикальную центральную ось 105 и включает в себя восемь расположенных рядом по окружности в целом треугольных секций 110. Каждая секция 110 платформы имеет плоское дно или нижнюю поверхность 120, плоскую заднюю поверхность 130, плоскую левую боковую поверхность 140 и плоскую правую боковую поверхность 150, и верхнюю или расположенную сверху поверхность 160. Поверхности 130, 140, 150 протягиваются перпендикулярно вверх от нижней поверхности 120, однако, как будет описано более подробно ниже, внутренний фрагмент верхней поверхности 160 ориентирован параллельно нижней поверхности 120, а внешний фрагмент верхней поверхности 160 ориентирован под острым углом относительно нижней поверхности 120. Секции 110 платформы размещены по окружности рядом друг с другом так, что каждая левая поверхность 140 во всей своей полноте примыкает к правой поверхности 150 во всей ее полноте соседний секции 110. Поскольку каждая секция 110 платформы идентична в этом варианте осуществления, платформа 100 является правильным многоугольником – имеющим все стороны одинаковой длины, которые симметрично размещены вокруг общей центральной точки. В частности, поскольку восемь секций 110 предусмотрено в этом варианте осуществления, когда все секции 110 платформы правильно выстроены, платформа 100 формирует форму восьмиугольника. Однако в других вариантах осуществления различные количества секций платформы (например, секций 110) могут быть предоставлены, давая в результате различные геометрии для платформы 100. Например, платформа, имеющая шесть соседних по окружности секций, будет иметь шестиугольную форму. Платформа 100 предпочтительно имеет диаметр или максимальную горизонтальную ширину между 3,0 и 6,0 футами, а более предпочтительно между 3,5 и 4,5 футами.
[0061] Обращаясь теперь к Фиг. 3A и 3B, каждая секция 110 платформы включает в себя центральную зону 170, множество каналов или канавок 180, сквозное отверстие 190 и соединительный механизм 135. Секции 110, каждая, имеют длину L110 (измеренную горизонтально от внутреннего края 175 на оси 105 до задней поверхности 130), предпочтительно, между 18,0 и 34,0 дюймами, ширину W110 (которая измерена горизонтально вдоль задней поверхности 130 между левой и правой боковыми поверхностями 140, 150), предпочтительно между 16,0 и 30,0 дюймами, и высоту H110 (которая измерена вертикально между верхней и нижней поверхностями 160, 120, соответственно, вдоль задней поверхности 130) предпочтительно между 2,0 и 12,0 дюймами. Каждая секция 110 сконструирована из одного материала, который имеет низкий коэффициент трения, такого как полиэтилен высокой плотности, полиэтилен низкой плотности, поливинилхлорид, полипропилен или любой другой подходящий материал с низким коэффициентом трения.
[0062] Нижняя поверхность 120 лежит в плоскости и является треугольной с внешними крайними точками 120a, 120b, которые равноудалены от внутренней крайней точки 120c. При описании отдельных секций 110 платформы 100 термины "внутренний" и "внешний" используются по отношению к собранной платформе 100, как показано на Фиг. 1, где внешние кромки платформы 100 совпадают с задней поверхностью 130 каждой секции 110, а центр платформы 100 совпадает с внутренним крем 175 каждой секции 110, который является соосным с центральной осью 105. Внутренний край 175 содержит верхний конец 175a и нижний конец 175b. Внутренняя конечная точка 120c нижней поверхности 120 совпадает с центральной осью 105 и нижним концом 175b внутренней кромки 175.
[0063] Задняя поверхность 130 лежит в плоскости, ориентированной перпендикулярно нижней поверхности 120, протягивается от нижней поверхности 120 в осевом направлении вверх к верхней поверхности 160 и имеет верхнюю кромку 130a, нижнюю кромку 130b, левую кромку 130c и правую кромку 130d. Левая и правая боковые поверхности 140, 150 также ориентированы перпендикулярно нижней поверхности 120, протягиваются от левой и правой кромок 130c, 130d задней поверхности 130 и заканчиваются на внутренней кромке 175. В настоящем варианте осуществления угол A145 между левой и правой боковыми поверхностями 140, 150 равен 45 градусам. Следует понимать, что угол A145 зависит от числа секций 110, используемых, чтобы формировать платформу 100. Например, как ранее обсуждалось, в варианте осуществления платформа 100 может быть выполнена из шести секций 110, тогда угол A145 будет равен 60 градусам. В другом варианте осуществления платформа 100 может состоять из девяти секций 110 с углом A145 в 40 градусов.
[0064] Обращаясь теперь к Фиг. 3A, 3B и 4A, верхняя поверхность 160 включает в себя центральную зону 170 и наклонный фрагмент 161. Центральная зона 170 содержит верхнюю поверхность 170a; кромку 170b, которая является параллельной задней поверхности 130; и верхнюю крайнюю точку 175a внутренней кромки 175, которая совпадает с осью 105. Треугольная верхняя поверхность 170a центральной зоны лежит в плоскости, ориентированной параллельно нижней поверхности 120. Центральная зона 170 имеет длину L170 (которая измерена горизонтально между кромкой 170b и верхней крайней точкой 175a) предпочтительно между 5,0 и 10,0 дюймами, ширину W170 (которая измерена вдоль кромки 170b между левой и правой боковыми поверхностями 140, 150) предпочтительно между 4,0 и 8,0 дюймами, и высоту H170 (которая измерена вертикально между верхней поверхностью 170a центральной зоны и нижней поверхностью 120 вдоль внутренней кромки 175) предпочтительно между 0,25 и 2,0 дюймами. Хотя показана в настоящем варианте осуществлении параллельной нижней поверхности 120, треугольная верхняя поверхность 170a центральной зоны может быть изогнута так, что верхняя крайняя точка 175a расположена в осевом направлении ниже вдоль оси 105, чем кромка 170b. В этом альтернативном варианте осуществления кромка 170b протягивается радиально по направлению к нижней кромке 175 и в осевом направлении вниз по направлению к верхней крайней точке 175a, в то же время выдаваясь вниз по направлению к нижней поверхности 120.
[0065] Как лучше показано на Фиг. 3B и 4A, наклонный фрагмент 161 верхней поверхности 160 включает в себя верхнюю поверхность 161a; заднюю кромку 161b, которая совпадает с кромкой 130a задней поверхности; и переднюю кромку 161c, которая совпадает с кромкой 170b центральной зоны и является параллельной задней поверхности 130. Верхняя поверхность 161a лежит в плоскости и протягивается от внешней кромки 130a, 161b радиально и в осевом направлении вниз к кромке 161c, 170b так, что угол A160 между плоскостью, определенной верхней поверхностью 161a, и плоскостью, определенной верхней поверхностью 170a центральной зоны, предпочтительно находится между 5,0 и 18,0 градусами. В альтернативном варианте осуществления, показанном на Фиг. 4B, угловой фрагмент 161 верхней поверхности 160 содержит верхнюю поверхность 162a, заднюю кромку 162b, которая совпадает с кромкой 130a задней поверхности; и переднюю кромку 162c, которая совпадает с кромкой 170b центральной зоны и является параллельной задней поверхности 130. Верхняя поверхность 162a определяет изогнутую поверхность, которая протягивается от внешней кромки 162b радиально по направлению к внутренней кромке 170b и в осевом направлении вниз к верхней поверхности 170a центральной зоны, в то же время выдаваясь вниз по направлению к нижней поверхности 120.
[0066] Обращаясь снова к Фиг. 3A и 3B, угловой фрагмент 161 также включает в себя множество каналов или канавок 180 и ребер 185, которые протягиваются радиально от задней поверхности 130 к кромке 170b. Как лучше показано на Фиг. 5A, каждый канал 180 имеет левую внутреннюю кромку 180a, правую внутреннюю кромку 18b и нижнюю внутреннюю кромку 180c. Левая кромка 180a является параллельной правой кромке 180b, и в этом варианте осуществления как левая, так и правая кромки 180a, 180b ортогональны нижней кромке 180c. Каждый канал 180 имеет ширину W180 предпочтительно между 0,20 и 1,0 дюймом и глубину D180, таким образом, предпочтительно между 0,05 и 1 дюймом.
[0067] Обращаясь все еще к Фиг. 5A, каждое ребро 185 содержит левую внешнюю кромку 185b, правую внешнюю кромку 185a и верхнюю внешнюю кромку 185c. Левая внешняя кромка 185b совпадает с правой внутренней кромкой 180b канала 180 и является параллельной правой внешней кромке 185a, которая совпадает с левой внутренней кромкой 180a канала 180. Как левая, так и правая внешние кромки 185b, 185a ортогональны верхней внешней кромке 185c. Каждый канал 180 имеет высоту H185 предпочтительно между 0,05 и 1 дюймом. Однако ширина, как будет обсуждаться ниже более подробно, будет изменяться в зависимости от количества и размера каналов 180.
[0068] В варианте осуществления, показанном на Фиг. 5A, нижние углы 180d, где левая и правая кромки 180a, 180b соединяются с нижней кромкой 180c, закруглены, и верхние углы 180e канала 180, где левая и правая кромки 180a, 180b соединяются с верхней поверхностью 160 секции 110, закруглены. Горизонтальная длина L180e изогнутого фрагмента угла 180e (которая измерена от правой кромки 180b до плоского фрагмента верхней поверхности 160) может быть увеличена или уменьшена по желанию.
[0069] Обращаясь теперь к Фиг. 5B и 5C и используя аналогичную номенклатуру для левой (181a, 182a), правой (181b, 182b), нижней внутренних кромок (181c, 182c) и нижнего (181d, 182d) и верхнего углов (181e, 182e), горизонтальная длина L181e, L182e изогнутого фрагмента верхнего угла 181e, 182e (которая измерена от левой кромки 181a, 182a до плоского фрагмента верхней поверхности 160) может быть увеличена или уменьшена по желанию. Например, изогнутая длина L181e варианта осуществления, показанного на Фиг. 5B, меньше изогнутой длины L182e варианта осуществления, показанного на Фиг. 5C.
[0070] Обращаясь теперь к Фиг. 5D, в другом варианте осуществления нижняя внутренняя кромка 183c формирует полукруг с диаметром, равным горизонтальному расстоянию между левой и правой кромками 183a, 183b. Углы 180d могут, таким образом, изменяться от имеющих девяносто градусов углов (между левой и правой кромками 180a, 180b и нижней кромкой 180c), закругленных углов в девяносто градусов, как показано на Фиг. 5A, до углов, больших, чем девяносто градусов, но меньших, чем 180 градусов.
[0071] Предшествующее обсуждение направлено на геометрию канавок 180 и ребер 185 на задней поверхности 130 секции 110 платформы. Однако высота H185 ребер 185 начинает скашиваться (т.е. уменьшаться), когда канавки 180 и ребра протягиваются по направлению к центральной зоне 170. Высота H185 ребра становится постепенно более короткой до тех пор, пока верхняя кромка 185c ребра 185 не соединится с верхней поверхностью 170c центральной зоны на внутренней кромке 170b центральной зоны. Геометрия и размеры каналов или канавок 180 остаются неизменными, когда ребра 185 уменьшаются по высоте.
[0072] Каждая секция 110 предпочтительно содержит 16-18 каналов 180; однако в целом число каналов 180 может изменяться в зависимости от размеров каждой секции 110, включающей в себя центральную зону 170, и ширины W180 каждого канала 180. Аналогично, количество ребер 185 будет также изменяться в зависимости от количества и размеров каналов 180, а также размеров каждой секции 110. В варианте осуществления, показанном на Фиг. 3A, секция 110 имеет длину L110, равную 24,0 дюймам, и 17 каналов 180, которые могут быть 0,20-0,375 дюйма шириной и расположены с интервалом приблизительно 0,79-0,97 дюйма; таким образом, 16 ребер 185 могут быть 0,79-0,97 дюйма шириной.
[0073] В другом варианте осуществления ширина W180 каналов 180 может изменяться между внешней кромкой 130a и центральной зоной 170. Например, ширина канала 180 может быть больше на внешней кромке 130a, чем на кромке 170b центральной зоны. В еще одном варианте осуществления глубина D180 каналов 180 может быть меньше 0,5 дюйма, а ширина W180 каналов 180 может быть меньше 0.2 дюйма, предоставляя возможность каждой секции 110 содержать более 18 каналов 180, так что ребра 185 формируют плавно поднимающиеся гребни на верхней поверхности 160 каждой секции 110.
[0074] Обращаясь теперь к Фиг. 3B, вертикальное сквозное отверстие 190, имеющее центральную ось 195, параллельную центральной оси 105, включает в себя изогнутую боковую стенку 190a и плоскую боковую стенку 190d, соединенную в крайних точках 190b, 190c, чтобы формировать сквозное отверстие с полукруглым по форме поперечным сечением, которое протягивается от верхней поверхности 160 к нижней поверхности 120. Сквозное отверстие 190 распложено близко к левой кромке 130c задней поверхности 130 – приблизительно равноудаленно к задней поверхности 130 и левой поверхности 140 – и с осью 195, ориентированной параллельно оси 105, задней поверхности 130 и левой поверхности 140. В настоящем варианте осуществления сквозное отверстие 190 ориентировано так, что плоская боковая стенка 190d ортогональна левой боковой стенке 140 секции 110 платформы. Сквозное отверстие 190 также имеет диаметр D190 (показано на Фиг. 3A) предпочтительно между 0,8 и 1,25 дюйма (который измерен между крайними точками 190b, 190c), который находится предпочтительно в 0,5-2,0 дюймах от задней поверхности 130 и левой поверхности 140.
[0075] Сквозное отверстие 190 может быть расположено где угодно вдоль и близко к задней поверхности 130, включая в себя, но не только, место, близкое к правой поверхности 150 или равноудаленное между левой и правой поверхностями 140, 150. Хотя показано в настоящем варианте осуществления как полукруглое, сквозное отверстие 190 может быть любой формы, включающей в себя, но не только, круг, эллипс, квадрат, прямоугольник или многоугольник. Дополнительно, сквозное отверстие 190 может быть ориентировано или повернуто различными способами, например, полукруглая форма может быть повернута вместо изменения местоположения изогнутой боковой стенки 190a. Кроме того, центральная ось 195 сквозного отверстия 190 может быть ориентирована под углом либо к, либо от центральной оси 105 платформы 100 под углом предпочтительно между 0,1 и 45,0 градусов. Дополнительно, как показано на Фиг. 1, сквозное отверстие 190 расположено на чередующейся секции 110 платформы 100, так что половина секций 110 не включает в себя сквозное отверстие 190. Однако в другом варианте осуществления сквозное отверстие 190 может быть расположено на каждой секции 110.
[0076] Обращаясь теперь к Фиг. 3A и 3B, каждый соединительный механизм 135 включает в себя крепление 134 с четырьмя сквозными отверстиями 133 и двумя приемными частями или вырезами 136a, 136b с четырьмя просверленными отверстиями 138. Каждая в целом прямоугольная приемная часть соединителя или вырез 136a, 136b расположена на задней поверхности 130. Одна приемная часть 136a расположена близко к левой боковине 140, и одна приемная часть 136b расположена близко к правой боковине 150. Обе приемных части или выреза 136a, 136b расположены приблизительно на полпути между верхней поверхностью 160 и нижней поверхностью 120 и протягиваются от боковой поверхности 140, 150 до внутренней кромки 137b выреза и в осевом направлении протягиваются вдоль центральной оси 105 от верхней кромки 137c выреза вниз до нижней кромки 137d выреза. Задняя поверхность 137a вырезов 136a, 136b определяет плоскость, которая является параллельной плоскости, определенной задней поверхностью 130 секции. Каждый вырез 136a, 136b имеет высоту предпочтительно между 0,5 и 2,2 дюйма, длину предпочтительно между 1,0 и 3,7 дюйма и глубину предпочтительно между 0,1 и 1,0 дюймом. В альтернативном варианте осуществления вырезы 136a, 136b не должны быть использованы, а, взамен, соединительный механизм 135 содержит крепления 134 со сквозными отверстиями 133, которые соответствуют высверленным отверстиям 138 и скреплены винтами 132.
[0077] Обращаясь теперь к Фиг. 3B, каждый вырез 136a, 136b дополнительно содержит два высверленных отверстия 138, расположенных ортогонально к и протягивающихся от задней поверхности 137a выреза. В настоящем варианте осуществления высверленные отверстия 138 разнесены равноудаленно между внутренней кромкой 137b выреза и боковой поверхностью 140, 150 секции платформы, а также равноудаленно между верхней и нижней кромками 137c, 137d выреза. В другом варианте осуществления высверленные отверстия 138 могут быть расположены в шахматном порядке между верхней и нижней кромками 137c, 137d выреза, чтобы формировать диагональный рисунок. Каждое высверленное отверстие 138 имеет диаметр предпочтительно между 0,05 и 0,25 и глубину предпочтительно между 0,1 и 1,0 дюймом.
[0078] Обращаясь теперь к Фиг. 3A, каждый соединитель или крепление 134 имеет первую прямоугольную сторону 134a, съемным образом прикрепленную к секции 110 платформы, и вторую прямоугольную сторону 134b, протягивающуюся наружу от первой прямоугольной стороны 134a и левой поверхности 140, при этом вторая сторона 134b не соединена с секцией 110 платформы. В настоящем варианте осуществления вторая сторона 134b будет соединяться с вырезом 136b, расположенным близко к правой стороне 150 соседней секции 110 платформы (не показана на Фиг. 3A). Первая и вторая прямоугольные стороны 134a, 134b являются симметричными относительно оси, определенной левой кромкой 130c задней поверхности 130. Угол между плоскостью, определенной первой стороной 134a, и плоскостью, определенной второй стороной 134b, зависит от числа секций 110 платформы и имеет значение предпочтительно между 120,0 и 150,0 градусами, а более предпочтительно 135,0 градусов. Каждая сторона 134a, 134b соединителя имеет высоту предпочтительно между 0,25 и 2,0 дюймами, длину предпочтительно между 0,75 и 3,5 дюймами и толщину предпочтительно между 0,05 и 1,0 дюймом.
[0079] Каждый соединитель 134 дополнительно содержит четыре сквозных отверстия 133, которые выровнены с высверленными отверстиями 138, когда соединитель 134 размещен в вырезах 136a, 136b. Соединители 134 могут применяться в качестве обособленного соединителя или в сочетании с любым подходящим стандартом крепления в области техники, включающим в себя, но не только, кронштейн, затвор, стяжной болт, петлю или скобу. Используются ли обособленно или с другими креплениями, соединители 134 съемным образом прикрепляются к высверленным отверстиям 138 в секциях 110 платформы с помощью винтов 132 или другим подходящим стандартом креплений в области техники; таким образом, скрепляя соседние секции 110 платформы вместе. Хотя показаны на Фиг. 3A и 3B как прямоугольные, вырезы 136a, 136b могут быть любой подходящей формы, включающей в себя, но не только, круглую, эллиптическую, квадратную, полукруглую или многоугольную.
[0080] Обращаясь теперь к Фиг. 6A и 6B, в этом варианте осуществления модуль 200 безопасности включает в себя вертикальный элемент 210 с центральной осью 205, пару горизонтальных штанг 220, 221, шарнирно соединенных с вертикальным элементом 210, пару опорных штанг 230, 231, шарнирно соединенных с горизонтальными штангами 220, 221 и скользящим образом соединенных с вертикальным элементом 210. Вертикальный элемент 210 является штангой с верхним концом 210a и нижним концом 210b и имеет полукруглое поперечное сечение, сконфигурированное, чтобы сопрягаться и скользящим образом зацеплять отверстие 190. Вертикальный элемент 210 имеет высоту H210 предпочтительно между 24,0 и 48,0 дюймами, а более предпочтительно между 30,0 и 42,0 дюймами и диаметр или ширину (для некруглого по форме вертикального элемента 210) предпочтительно между 3/4 и 1 дюймом.
[0081] Вертикальный элемент 210 также включает в себя первый и второй паз 215a, 215b с верхним концом 210c паза, расположенным близко к верхнему концу 210a и протягивающийся вниз к нижнему концу 210d паза. Первый паз 215a расположен под углом A215 относительно центральной оси 205 от второго паза 215b. Угол A215 зависит от числа секций 110 платформы и предпочтительно находится между 120 и 150 градусами, а более предпочтительно равен 135 градусам. Каждый паз 215a, 215b дополнительно содержит выступ (не показан), так что раскрытие углубленных полос 215a, 215b является более узким, чем внутренность углубленных полос 215a, 215b. Вертикальный элемент 210 может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[0082] Обращаясь теперь к Фиг. 6B, горизонтальные штанги 220, 221 содержат внешний конец 220a, 221a, соответственно, внутренний конец 220b, 221b, соответственно, и точку 220c, 221c соединения опорной штанги, соответственно. В этом варианте осуществления горизонтальные штанги 220, 221 имеют полукруглое поперечное сечение; длину L220, L221 предпочтительно между 15,0 и 28,0 дюймами, а более предпочтительно между 18,0 и 24,0 дюймами; и диаметр или ширину (для некруглых по форме горизонтальных штанг 220, 221) предпочтительно между 3/4 и 1 дюймом. Горизонтальные штанги 220, 221 шарнирно соединены с вертикальным элементом 210 на внутреннем конце 220b, 221b. В целом горизонтальные штанги 220, 221 могут быть шарнирно соединены с вертикальным элементом 210 с помощью петли, шплинта или другого подходящего соединителя, которые предоставляет возможность горизонтальным штангам 220, 221 поворачиваться на внутреннем конце 220b, 221b. Горизонтальные штанги 220, 221 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры, но предпочтительно выполнены из металлической или полимерной штанги, которая покрыта амортизирующим полимером, таким как резина.
[0083] Обращаясь снова к Фиг. 6A и 6B, опорные штанги 230, 231 содержат первый конец 230a, 231a и второй конец 230b, 231b. В этом варианте осуществления опорные штанги 230, 231 имеют круглое поперечное сечение; длину L230, L231, соответственно, предпочтительно между 6,0 и 24,0 дюймами, а более предпочтительно между 12,0 и 18,0 дюймами; и диаметр предпочтительно между 0,5 и 1 дюймом. Опорные штанги 230, 231 шарнирно соединены с горизонтальными штангами 220, 221, соответственно, на первых концах 230a, 231a, соответственно. В целом опорные штанги 230, 231 могут быть шарнирно соединены с горизонтальными штангами 220, 221 с помощью петли, шплинта или другого подходящего соединителя, которые предоставляет возможность опорным штангам 230, 231 поворачиваться на первом конце 230a, 231a. Опорные штанги 230, 231 скользящим образом соединены с вертикальным элементом 210 на вторых концах 230b, 231b, соответственно, которые удерживаются в пазах 215a, 215b, соответственно, с помощью выступов или шипов, которые удерживаются посредством выступа паза 215a, 215b. Опорные штанги 230, 231 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[0084] Кнопка разблокирования (не показана) предпочтительно предусмотрена на вертикальном элементе 210 близко к верхнему углубленному концу 210c вертикального элемента 210. Соединительный механизм (не показан) предпочтительно предусмотрен на модуле 200 безопасности, чтобы работать в сочетании с кнопкой разблокирования. Кнопка разблокирования и соединительный механизм могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[0085] Хотя система 200 безопасности показана в настоящем варианте осуществления в качестве групп взаимосвязанных штанг, система 200 безопасности может содержать любую подходящую систему, известную в области техники, которая помогает предотвращать вред пользователю от падения во время использования локомоционной системы 10. Например, в других вариантах осуществления система 200 безопасности может содержать страховочный пояс, надеваемый пользователем и установленный на неподвижный объект.
[0086] В незадействованном состоянии горизонтальные штанги 220, 221 и опорные штанги 230, 231 свернуты или сложены на приблизительно любую сторону вертикального элемента 210. Второй конец 230b, 231b каждой опорной штанги 230, 231 расположен близко к нижнему углубленному концу 210d вертикального элемента 210. Чтобы привести в действие горизонтальные штанги 220, 221, второй конец 230b, 231b опорных штанг 230, 231 скользит в осевом направлении вверх вдоль оси 205 по углубленной полосе 215a, 215b до тех пор, пока второй конец 230b, 231b не зацепит соединительный механизм. Перемещение второго конца 230b, 231b вверх поднимает горизонтальные штанги 220, 221 из вертикального или близкого к вертикальному положения посредством поворота как соединения опорной штанги 230, 231 (второго конца 230b, 231b) с горизонтальной штангой 220, 221, так и соединения горизонтальной штанги (внутренний конец 220b, 221b) с вертикальным элементом 210, чтобы приводить горизонтальные штанги 220, 221 в горизонтальное или близкое к горизонтальному положение. В приведенном в действие состоянии горизонтальные штанги 220, 221 располагаются ортогонально центральной оси 205. В другом варианте осуществления горизонтальные штанги 220, 221 могут быть расположены под углом, который больше или меньше 90 градусов от центральной оси 205.
[0087] Горизонтальные штанги 220, 221 могут быть опущены посредством задействования кнопки разблокирования; таким образом, предоставляя возможность опорным штангам 230, 231 скользить вниз по углубленным полосам 215a, 215b вдоль центральной оси 205. Перемещение второго конца 230b, 231b вниз опускает горизонтальные штанги 220, 221 из горизонтального или близкого к горизонтальному положения посредством поворота как соединения опорной штанги 230, 231 (второго конца 230b, 231b) с горизонтальной штангой 220, 221, так и соединения горизонтальной штанги (внутренний конец 220b, 221b) с вертикальным элементом 210, чтобы приводить горизонтальные штанги 220, 221 в вертикальное или близкое к вертикальному положение.
[0088] Обращаясь к Фиг. 7 и 8, показан вариант осуществления оболочки 300 для ступни для использования с вариантами осуществления платформ, описанных в данном документе. В этом варианте осуществления оболочки 300 для ступней содержат верхний фрагмент 310, пару застегивающих ремешков 320, подошву 330, множество накладок 340-360, 380-385 с переменным коэффициентом трения и анкерный штифт 390. Когда используется в данном документе, термин "оболочка для ступней" ссылается на туфли или галоши. Галоша является оболочкой для ступни, которая, по меньшей мере, частично покрывает обувь владельца и, как правило, включает в себя подошву и средство для присоединения подошвы к обуви или телу владельца (например, ступне, лодыжке или ноге). Дополнительно, когда используются, чтобы описывать оболочку 300 для ступни, термины "верхняя сторона" или "нижняя сторона" могут быть использованы в целях описания с выражениями "верх", "верхний", "вверх" или "выше", означающими, как правило, направление к или ближе к концу оболочки 300 для ступни, наиболее близкому к носку 301, и с выражениями "низ", "ниже", "вниз" или "под", означающими, как правило, направление к или ближе к концу оболочки 300 для ступни, ближайшему к пятке 302. Общая длина и ширина оболочки 300 для ступни будет изменяться в зависимости от размера ступни владельца; таким образом, оболочка 300 для ступни может быть приспособлена, чтобы подгоняться под ступню любого размера.
[0089] Верхний фрагмент 310 оболочки 300 для ступни, как правило, покрывает фрагмент или всю верхнюю часть ступни владельца. В настоящем варианте осуществления верхний фрагмент 310 покрывает носок 301, пятку 302 и боковины 303, 304 ступни владельца. Верхний фрагмент 310 может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, ткань, кожу или другой подходящий материал, известный в области техники.
[0090] Обращаясь теперь к Фиг. 7, застегивающие ремешки 320 и фиксаторы 325 расположены на противоположных сторонах верхнего фрагмента 310. Застегивающие ремешки 320 имеют ширину предпочтительно между 0,5 и 2,0 дюймами и длину предпочтительно между 6,0 и 12,0 дюймами длиной. Застегивающие ремешки 320 протягиваются над верхней стороной ступни владельца к фиксатору 325, расположенному на противоположной стороне верхнего фрагмента 310 к стороне, на которой застегивающий ремешок 320 начинается. В этом варианте осуществления фиксатор 325 содержит щель, через которую застегивающий ремешок 320 продевается, предоставляя возможность застегивающему ремешку 320 сгибаться поверх себя и протягиваться обратно к стороне верхнего фрагмента 310, на которой застегивающий ремешок 320 начинается; застежки-липучки могут быть использованы на соседних поверхностях застегивающих ремешков 320, чтобы закреплять застегивающие ремешки 320. Однако в целом другие подходящие механизмы удержания, известные в области техники, включающие в себя, без ограничения, застежку-липучку, пряжку, кнопку, замочек, эластичную оболочку или шнурки для обуви, могут быть применены.
[0091] Обращаясь опять к Фиг. 7 и 8, подошва 330 оболочки 300 для ступни покрывает низ ступни владельца и соединяется с верхним фрагментом 310 по всему периметру ступни владельца. В этом варианте осуществления верхний фрагмент 310 и подошва содержат один непрерывный фрагмент материала.
[0092] Подошва 330 содержит три секции – передний отдел 335 стопы, средний отдел 365 стопы и задний отдел стопы 375. Секция 335 переднего отдела стопы включает в себя фрикционную накладку 340 носка и первую, вторую и третью накладку 350, 355, 360 переднего отдела стопы, соответственно. Фрикционная накладка 340 носка расположена на нижней стороне подошвы 330 близко к носку 301 или "верху" подошвы 330. Фрикционная накладка 340 носка протягивается от верха носка 301 вниз к пятке 302 предпочтительно между 0,5 и 1,5 дюймами и от одной боковины 303 по всей ширине подошвы 330 к другой боковине 304. Первая фрикционная накладка 350 расположена на подошве 330 ниже и близко к фрикционной накладке 340 носка и протягивается вниз к пятке 302 предпочтительно между 1,0 и 3,0 дюймами и от одной боковины 303 по всей ширине подошвы 330 к другой боковине 304. Вторая фрикционная накладка 355 расположена на подошве 330 ниже и близко к первой фрикционной накладке 350 и протягивается вниз к пятке 302 предпочтительно между 1,0 и 3,0 дюймами и от места, близкого к одной боковине 303, по всей ширине подошвы 330 к месту, близкому к другой боковине 304. Третья фрикционная накладка 360 расположена на подошве 330 ниже и близко ко второй фрикционной накладке 355 и протягивается вниз к пятке 302 предпочтительно между 1,0 и 3,0 дюймами и от места, близкого к одной боковине 303, по всей ширине подошвы 330 к месту, близкому к другой боковине 304. Хотя показана в настоящем варианте осуществления с четырьмя фрикционными накладками 340, 350, 355, 360, в других вариантах осуществления секция 335 переднего отдела стопы может содержать три или меньше фрикционных накладок изменяющихся размеров. В еще других вариантах осуществления секция 335 переднего отдела стопы может содержать пять или более фрикционных накладок изменяющихся размеров.
[0093] Все еще обращаясь к Фиг. 8, секция 365 среднего отдела стопы содержит фрагмент оболочки 300 обуви, которая поддерживает свод стопы владельца. Как показано на Фиг. 8, в этом варианте осуществления секция 365 среднего отдела стопы не содержит каких-либо фрикционных накладок. Однако в других вариантах осуществления секция 365 среднего отдела стопы может содержать одну или более фрикционных накладок изменяющихся размеров.
[0094] Секция 375 заднего отдела стопы содержит фрикционную накладку 345 пятки и четвертую и пятую накладку 380, 385 заднего отдела стопы, соответственно. Фрикционная накладка 345 пятки расположена на нижней стороне подошвы 330 близко к пятке 302 или нижнему концу подошвы 330. Фрикционная накладка 345 пятки протягивается от низа пятки 302 вверх к носку 301 предпочтительно между 0,5 и 1,5 дюймами и от одной боковины 303 по всей ширине подошвы 330 к другой боковине 304. Четвертая фрикционная накладка 380 расположена на подошве 330 выше и близко к фрикционной накладке 345 пятки и протягивается вверх к носку 301 предпочтительно между 1,0 и 3,0 дюймами и от одной боковины 303 по всей ширине подошвы 330 к другой боковине 304. Пятая фрикционная накладка 385 расположена на подошве 330 выше и близко к четвертой фрикционной накладке 380 и протягивается вверх к носку 301 предпочтительно между 1,0 и 3,0 дюймами и непосредственно от одной боковины 303 по всей ширине подошвы 330 непосредственно к другой боковине 304. Хотя показана в настоящем варианте осуществления с тремя фрикционными накладками 345, 380, 385, в других вариантах осуществления секция 375 заднего отдела стопы может содержать две или несколько фрикционных накладок изменяющихся размеров. В еще других вариантах осуществления секция 375 заднего отдела стопы может содержать четыре или более фрикционных накладок изменяющихся размеров.
[0095] Все фрикционные накладки 340, 345, 350, 355, 360, 380, 385 имеют толщину предпочтительно между 0,1 и 1,0 дюймом. Хотя фрикционные накладки 340-360, 380-385 показаны в настоящем варианте осуществления как протягивающиеся от одной боковины 303 по всей ширине подошвы 330 к другой боковине 304, в других вариантах осуществления фрикционные накладки 340-360, 380-385 могут протягиваться только поперек фрагмента подошвы 330 между боковинами 303, 304. Фрикционные накладки 340-360, 380-385 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры, керамику, резину, ткань, стекловолокно или мех. Фрикционные накладки 340-360, 380-385 предпочтительно выполнены из полиэтилена или политетрафторэтилена, а более предпочтительно выполнены из полиэтилена высокой плотности. В другом варианте осуществления подошва 330 может содержать слой меха вместо фрикционных накладок.
[0096] Обращаясь теперь к Фиг. 8 и 9, оболочка 300 для обуви дополнительно содержит анкерный штифт 390, протягивающийся от нижней поверхности третьей фрикционной накладки 360 близко к секции 365 среднего отдела стопы. Анкерный штифт 390 имеет диаметр предпочтительно меньше 1/2 дюйма, а более предпочтительно меньше 1/4 дюйма. Анкерный штифт 390 протягивается от третьей фрикционной накладки 360 из подошвы 330 ортогонально из плоскости, определенной третьей фрикционной накладкой 360, менее чем на 1,0 дюйм, а более предпочтительно между 1/8 и 3/4 дюйма. В другом варианте осуществления анкерный штифт 390 может быть расположен на первой или второй фрикционной накладке 350, 355; в среднем отделе 365 стопы; на четвертой или пятой фрикционной накладке 380, 385; или между фрикционными накладками 340-360, 380-385. В еще одном варианте осуществления анкерный штифт 390 может быть подпружинен и расположен в круглой выемке, так что в незадействованном состоянии анкерный штифт 390 выступает наружу из выемки, а когда давление накладывается на анкерный штифт 390, штифт 390 убирается в выемку. В еще одном варианте осуществления подошва 330 может содержать множество анкерных штифтов 390, которые протягиваются от или между различными фрикционными накладками от подошвы 330 ортогонально из плоскости, определенной фрикционной накладкой, предпочтительно менее чем на 1,0 дюйм. Анкерный штифт 390 может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры, металлы, керамику или резину.
[0097] Обращаясь теперь к Фиг. 3A, 3B, 6A, 6B, модуль 200 безопасности взаимодействует с платформой 100 в сквозных отверстиях 190. Нижний конец 210b вертикального элемента 210 вставляется в сквозное отверстие 190. В этом варианте осуществления вертикальный элемент 210 имеет полукруглое поперечное сечение, имеющее размер, слегка меньший, чем полукруглое по форме сквозное отверстие 190, которое вырезано в секции 110 платформы. Полукруглая форма как вертикального элемента 210, так и сквозного отверстия 190 гарантирует, что модуль безопасности устанавливается только в одной ориентации, и предотвращает вращение вертикального элемента 210. Горизонтальная штанга 220, когда полностью разложена вверх, размещается параллельно задней поверхности 130 секции 110 платформы. Горизонтальная штанга 221, когда полностью разложена вверх, размещается параллельно задней поверхности 130 соседней секции 110 платформы.
[0098] Обращаясь теперь к Фиг. 8 и 9, оболочки 300 для ступней взаимодействуют с платформой 100 через анкерные штифты 390 и фрикционные накладки 340-360, 380-385. Анкерные штифты 390 вставляются в каналы 180, предоставляя возможность фрикционным накладкам 340-360, 380-385 контактировать с верхней поверхностью 160 платформы 100. Поскольку верхняя поверхность 160 наклонена, фрикционные накладки 340-360, 380-385 будут скользить вниз к центральной зоне 170 под действием силы тяжести. Легкость и интервал скольжения накладок 340-360, 380-385 по поверхности 160 платформы будут зависеть от коэффициента трения между накладками 340-360, 380-385 и поверхностью 160. Коэффициент трения может изменяться в зависимости от материала, выбранного как для поверхности 160 платформы, так и для накладок 340-360, 380-385. Таким образом, материал для фрикционных накладок может быть выбран на основе желаемого коэффициента трения.
[0099] Фрикционные накладки 340-360, 380-385 предпочтительно выполнены из материала, имеющего коэффициент сухого трения с поверхностью 160 платформы менее или равный 0,40 или коэффициент трения со смазочным материалом с поверхностью 160 платформы менее или равный 0,25. Кроме того, каждая фрикционная накладка 340-360, 380-385 может, но не должна, иметь различные коэффициенты трения. Различные коэффициенты трения могут быть достигнуты для различных фрагментов подошвы 330 галоши посредством изменения материалов каждой фрикционной накладки 340-360, 380-385. Таким образом, коэффициент трения отдельных фрикционных накладок 340-360, 380-385 может варьироваться между каждой фрикционной накладкой, предоставляя возможность фрикционным накладкам 340, 345 носка и пятки, например, иметь больший коэффициент трения, чем внутренние первая, вторая, третья, четвертая и пятая фрикционные накладки 350, 355, 360, 380, 385. Увеличение коэффициента трения между фрикционными накладками 340, 345 носка и пятки и поверхностью 160 платформы предоставляет возможность большей устойчивости посредством уменьшения эффекта скольжения, когда либо пятка нажимает, либо носок отрывается от поверхности 160 платформы.
[00100] Использование смазки может дополнительно снижать коэффициент трения между накладками 340-360, 380-385 и поверхностью 160 платформы. Могут быть использованы стандартные смазки в области техники, включающие в себя, но не только силиконовые салфетки или аэрозоли на основе масла.
[00101] Чтобы использовать локомоционную систему 10, пользователь надевает оболочки 300 для ступней на обе ступни и вступает на платформу 100. Если все горизонтальные штанги 220, 221 были приведены в действие или подняты в их полностью расправленное и горизонтальное положение, пользователю будет необходимо опускать две горизонтальные штанги 220, 221, внешние концы 220a, 221a которых находятся близко друг к другу, задействуя кнопку разблокирования на каждом соответствующем вертикальном элементе 210. Пользователь может затем вступать на платформу 100 и вступать в центральную зону 170. Пользователь затем приводит в действие все горизонтальные штанги 220, 221, которые не полностью расправлены и являются горизонтальными или субгоризонтальными, посредством скольжения второго конца 230b, 231b каждой опорной штанги 230, 231 вверх до тех пор, пока второй конец 230b, 231b не зацепит соединительный механизм. Пользователь будет затем применять устройство виртуальной реальности по своему выбору. В виртуальном окружении любое движение в физическом мире, выполненное пользователем, будет транслироваться в движение в виртуальном мире.
[00102] Пользователь может пользоваться свободой движения, находясь на платформе 100. Когда пользователь выполняет первый шаг с отрывом первой ноги от центральной зоны 170 и на наклонный фрагмент 161 верхней поверхности 160, анкерный штифт 390 на нижней стороне оболочки 300 для ступни зацепляет канал или канавку 180 на наклонной поверхности 161. Когда пользователь выполняет второй шаг своей второй ногой, сила тяжести с анкерным штифтом 390, который слегка меньше в диаметре и короче по длине, чем каждый канал 180, направляет первую ступню пользователя вниз по скату наклонной поверхности 161 к центральной зоне 170. Низкий коэффициент трения между накладками 340-360, 380-385 оболочки для ступни и поверхностью 160 платформы предоставляет возможность оболочке для ступни скользить по поверхности 160. Анкерный штифт 390 на оболочке 300 второй ступни пользователя затем зацепляет канал 180, и процесс повторяется. Пользователь, таким образом, имеет возможность поддерживать непрерывное идущее движение в виртуальном мире, в то же время двигаясь только в пределах периметра платформы 100.
[00103] В то время как пользователь идет по локомоционной платформе 100, анкерный штифт 390 может не всегда зацеплять канал 180 при первоначальном контакте с платформой 100. Когда это случается, уклон наклонной поверхности 161 и сила тяжести будут все еще вынуждать накладки 340-360, 380-385 оболочки для ступни скользить вниз к центральной зоне 170. Поскольку оболочки 300 для ступней скользят вниз по наклонной поверхности 161, анкерный штифт 390 будет попадать в канал 180, дополнительно направляя оболочку для ступни к центральной зоне 170. Анкерный штифт 390 будет попадать в канал 180, поскольку пространство между каналами 180 уменьшается от задней кромки 161b наклонной поверхности 161 к центральной зоне 170.
[00104] Обращаясь сейчас к Фиг. 10, показан другой вариант осуществления локомоционной системы 40 в соответствии с принципами, описанными в данном документе. В этом варианте осуществления локомоционная система 40 включает в себя платформу 400, структуру 500 соединения платформы (показана на Фиг. 14 и 17A), основание 600, узел 700 поддержки со страховочным поясом, страховочный пояс 800 и туфли или оболочки 900 для ступней с переменным коэффициентом трения (показаны на Фиг. 22).
[00105] Обращаясь теперь к Фиг. 11, в этом варианте осуществления платформа 400 имеет вертикальную центральную ось 405 и содержит восемь расположенных рядом по окружности в целом трапециевидных секций 410, распложенных вокруг центральной секции или зоны 470. Каждая секция 410 имеет плоскую донную или нижнюю поверхность 420, плоскую заднюю поверхность 430, противоположную плоской внутренней поверхности 475, плоскую левую боковую поверхность 440 и плоскую правую боковую поверхность 450 и вершинную или верхнюю поверхность 460. Поверхности 430, 440, 450 протягиваются перпендикулярно вверх от нижней поверхности 420, и как будет описано более подробно ниже, внешний фрагмент верхней поверхности 460 ориентирован под острым углом относительно нижней поверхности 420. Секции 410 платформы размещены по окружности рядом друг с другом так, что каждая левая поверхность 440 во всей своей полноте примыкает к правой поверхности 450 во всей своей полноте соседний секции 410.
[00106] Центральная зона 470 содержит верхнюю поверхность 470a напротив нижней поверхности 470c и восемь равносторонних боковых поверхностей 470b, расположенных под равными внутренними углами друг от друга. Поскольку центральная зона 470 является и равносторонней, и равноугольной, центральная зона 470 является правильным многоугольником – имеющим все стороны одинаковой длины, которые симметрично расположены относительно общей центральной точки. Как ранее описано, секции 410 платформы расположены вокруг центральной зоны 470, так что каждая внутренняя поверхность 475 полностью примыкает ко всей боковой поверхности 470b центральной зоны 470. Поскольку все секции 410 платформы являются идентичными в этом варианте осуществления, платформа 400 также является правильным многоугольником. Платформа 400 предпочтительно имеет диаметр или максимальную горизонтальную ширину между 3,0 и 6,0 футами, а более предпочтительно между 3,5 и 4,5 футами.
[00107] Поскольку восемь секций 110 предоставлены в этом варианте осуществления, когда все секции 410 платформы правильно выровнены, платформа 400 формирует восьмиугольную форму. Однако в других вариантах осуществления различные количества секций платформы (например, секций 410) могут быть предоставлены, давая в результате различные геометрии для платформы 400. Например, платформа, имеющая шесть соседних по окружности секций, будет иметь шестиугольную форму.
[00108] Обращаясь теперь к Фиг. 12A, 12B, 13A и 13B, каждая секция 410 включает в себя множество каналов или канавок 480, расположенных на верхней поверхности 460, два канала 490, 491, расположенных на нижней поверхности 420, три расширительных петли 443, расположенных на левой боковине 440, три язычка 453, расположенных на правой боковине 450, и две щели 477, расположенных на внутренней поверхности 475. Каждая из секций 410 имеет длину L410 (измеренную горизонтально от внутренней поверхности 475 до задней поверхности 430) предпочтительно между 12,0 и 18,0 дюймами; заднюю ширину W410 (которая измерена горизонтально вдоль задней поверхности 430 между левой и правой боковыми поверхностями 440, 450, соответственно) предпочтительно между 16,0 и 21,0 дюймом; внутреннюю ширину W475 (которая измерена горизонтально вдоль внутренней поверхности 475 между левой и правой боковыми поверхностями 440, 450, соответственно) предпочтительно между 6,0 и 8,0 дюймами; заднюю высоту H410 (которая измерена вертикально между верхней и нижней поверхностями 460, 420 вдоль задней поверхности 430) предпочтительно между 2,0 и 12,0 дюймами; и внутреннюю высоту H475 (которая измерена вертикально между верхней и нижней поверхностями 460, 420 вдоль внутренней поверхности 475) предпочтительно между 0,2 и 2,0 дюймами. Каждая секция 410 сконструирована из одного материала, который имеет низкий коэффициент трения, такого как полиэтилен высокой плотности, полиэтилен низкой плотности, поливинилхлорид, полипропилен или любой другой подходящий материал с низким коэффициентом трения.
[00109] Обращаясь все еще к Фиг. 12A и 12B, нижняя поверхность 420 лежит в плоскости, перпендикулярной центральной оси 405, является трапециевидной с задней поверхностью 430 параллельно внутренней поверхности 475. При описании отдельных секций 410 платформы 400 термины "внутренний" и "внешний" используются по отношению к собранной платформе 400, как показано на Фиг. 10, где внешние кромки платформы 400 совпадают с задней поверхностью 430 каждой секции 410, а центр платформы 400 совпадает с центром центральной зоны 470, который является соосным с центральной осью 405.
[00110] Задняя поверхность 430 лежит в плоскости, ориентированной перпендикулярно нижней поверхности 420, протягивается от нижней поверхности 420 в осевом направлении вверх к верхней поверхности 460 и имеет верхнюю кромку 430a, нижнюю кромку 430b, левую кромку 430c и правую кромку 430d. Левая и правая боковые поверхности 440, 450 также ориентированы перпендикулярно нижней поверхности 420, протягиваются от левой и правой кромок 430c, 430d, соответственно, задней поверхности 430 и заканчиваются на внутренней поверхности 475. Внутренняя поверхность 475 имеет верхнюю кромку 475a и нижнюю кромку 475b. В настоящем варианте осуществления угол A445 между левой и правой боковыми поверхностями 440, 450, соответственно равен 45 градусам. Следует понимать, что угол A445 зависит от числа секций 410, используемых, чтобы формировать платформу 400. Например, как ранее обсуждалось, в варианте осуществления платформа 400 может состоять из шести секций 410, тогда угол A445 будет равен 60 градусам. В другом варианте осуществления платформа 400 может состоять из девяти секций 410 с углом A445 в 40 градусов.
[00111] Обращаясь теперь к Фиг. 13A и 13B, верхняя поверхность 460 платформы включает в себя заднюю кромку 460b, которая совпадает с кромкой 430a задней поверхности; и переднюю кромку 460c, которая совпадает с внутренней верхней кромкой 475a и является параллельной задней кромке 460b. Верхняя поверхность 460 лежит в плоскости и протягивается от внешней кромки 430a, 430b радиально внутрь и в осевом направлении вниз к внутренней кромке 460c, 475a так, что угол A460 между плоскостью, определенной верхней поверхностью 460, и плоскостью, определенной верхней поверхностью 470a центральной зоны, предпочтительно находится между 5,0 и 18,0 градусами. В альтернативном варианте осуществления, показанном на Фиг. 13B, верхняя поверхность 460 содержит верхнюю лицевую поверхность 462a, заднюю кромку 462b, которая совпадает с кромкой 430a задней поверхности; и переднюю кромку 462c, которая совпадает с внутренней верхней кромкой 475a и является параллельной задней кромке 460b. Верхняя поверхность 462a определяет изогнутую поверхность, которая протягивается от внешней кромки 462b радиально внутрь и в осевом направлении вниз к внутренней кромке 475a, в то же время выпячиваясь вниз к нижней поверхности 420.
[00112] Обращаясь теперь к Фиг. 12A, верхняя поверхность 460 также включает в себя множество каналов или канавок 480 и ребер 485, которые протягиваются радиально между задней поверхностью 430 и внутренней кромкой 475. Каналы 480 настоящего варианта осуществления могут иметь любую геометрию, ранее описанную или показанную на Фиг. 5A-5D. Аналогичные номера использованы, чтобы обозначать аналогичные части. Дополнительно, канавки 480 могут становиться более мелкими и суживающимися на концах, близких к задней поверхности 430 и внутренней поверхности 475. В другом варианте осуществления верхняя поверхность 460 может не включать в себя каналы или канавки, а вместо этого имеет гладкую поверхность.
[00113] Каждая секция 410 предпочтительно содержит 16-18 каналов 480; однако количество каналов 480 будет изменяться в зависимости от размеров каждой секции 410, включающей в себя центральную зону 470 и ширину каждого канала 480. Аналогично, количество ребер 485 будет также изменяться в зависимости от количества и размеров каналов 480, а также размеров каждой секции 410.
[00114] Обращаясь теперь к Фиг. 12A и 12B, два канала или выреза, внешний и внутренний канал 490, 491, соответственно, сформированы в нижней поверхности 420 и протягиваются между и через левую и правую боковые поверхности 440, 450, соответственно. Каналы 490, 491 расположены параллельно друг другу и параллельно задней и внутренней поверхностям 430, 475, соответственно. Внешний канал 490 расположен близко к задней поверхности 430, а внутренний канал 491 расположен близко к внутренней поверхности 475, каждый канал 490, 491 протягивается в осевом направлении вверх от нижней поверхности 420 к верхней поверхности 460. Внешний канал 490 является, как правило T-образным, имеющим заднюю поверхность 490a напротив передней поверхности 490b, и верхнюю поверхность 490c, расположенную между и соединяющую заднюю и переднюю поверхности 490a, 490b, соответственно. Расширение 490d внешнего канала 490 расположено на задней поверхности 430 и протягивается от нижней кромки 430b в осевом направлении вверх к верхней кромке 430a, содержит левую поверхность 490e напротив правой поверхности 490f и верхнюю поверхность 490g, расположенную между и соединяющую левую и правую поверхности 490e, 490f, соответственно. Расширение 490d перпендикулярно пересекает заднюю поверхность 490a, чтобы формировать T-образный канал в нижней поверхности 420.
[00115] Внешний канал 490 имеет ширину W490 (которая измерена горизонтально вдоль нижней поверхности 420 между левой и правой боковыми поверхностями 490a, 490b, соответственно) предпочтительно между 5,0 и 7,0 дюймами; и высоту H490 (которая измерена вертикально между нижней поверхностью 420 и верхней поверхностью 490c вдоль левой поверхности 440) предпочтительно между 1,0 и 6,0 дюймами. Фрагмент 490d внешнего канала 490 имеет ширину W490d (которая измерена горизонтально вдоль нижней поверхности 420 между левой и правой боковыми поверхностями 440e, 440f, соответственно) предпочтительно между 2,0 и 5,0 дюймами; и высоту H490d (которая измерена вертикально между нижней поверхностью 420 и верхней поверхностью 490g вдоль задней поверхности 430) предпочтительно между 1,0 и 6,0 дюймами. В настоящем варианте осуществления расширение 490d внешнего канала 490 расположено приблизительно равноудаленно от левого и правого боков 440, 450, соответственно. В других вариантах осуществления расширение 490d может быть расположено ближе к левой стороне 440 или ближе к правой стороне 450.
[00116] Обращаясь все еще к Фиг. 12A и 12B, внутренний канал 491 имеет заднюю поверхность 491a напротив передней поверхности 491b и верхнюю поверхность 491c, расположенную между и соединяющую заднюю и переднюю поверхности 491a, 491b, соответственно. Внутренний канал 491 имеет ширину W491 (которая измерена горизонтально вдоль нижней поверхности 420 между левой и правой боковыми поверхностями 491a, 490b, соответственно) предпочтительно между 2,0 и 9,0 дюймами; и высоту H491 (которая измерена вертикально между нижней поверхностью 420 и верхней поверхностью 491c вдоль левой поверхности 440) предпочтительно между 0,2 и 2,0 дюймами. В настоящем варианте осуществления внешний канал 490 имеет меньшую ширину W490, чем ширина W491 внутреннего канала 491, и внешний канал 490 имеет большую высоту H490, чем высота H491 внутреннего канала 491. В других вариантах осуществления внешний канал 490 может иметь большую ширину W490, чем ширина W491 и/или меньшую высоту H490, чем высота H491. Дополнительно, каналы 490, 491 могут быть распределены вдоль левого и правого боков 440, 450, соответственно, симметрично или асимметрично (показано). В других вариантах осуществления только один канал может быть использован или больше двух каналов.
[00117] Обращаясь теперь к Фиг. 12B, три расширительные петли 443 расположены на левой боковине 440 близко к нижней поверхности 420. Каждая расширительная петля 443 имеет верхнюю поверхность 443a напротив нижней поверхности 443b, является, как правило, кубовидной, протягивается от левой боковины 440 радиально наружу и имеет сквозное отверстие 443c, которое протягивается от верхней поверхности 443a к нижней поверхности 443b. В настоящем варианте осуществления одна расширительная петля 443 расположена близко к задней поверхности 430, одна расширительная петля 443 расположена близко к внутренней поверхности 475, и одна расширительная петля 443 расположена между внутренним и внешним каналами 491, 490. В альтернативном варианте осуществления две расширительных петли могут быть использованы в любой комбинации местоположений. В других вариантах осуществления могут быть применены одна или более расширительных петель.
[00118] Обращаясь теперь к Фиг. 12A, три язычка 453 расположены на правой боковине 450 близко к нижней поверхности 420. Каждый язычок 453 содержит L-образный фрагмент 453a, расположенный на дне основной части 453b, которая копланарна с правой боковой поверхностью 450, и боковины основной части 453b формируются посредством вырезов 453c. L-образный фрагмент 453a протягивается в осевом направлении наружу от правой боковой поверхности 450. В настоящем варианте осуществления один язычок 453 расположен близко к задней поверхности 430, один язычок 453 расположен близко к внутренней поверхности 475, и один язычок 453 расположен между внутренним и внешним каналами 491, 490. Каждый язычок 453 на правой боковой поверхности 450 зацепляет взаимоблокирующим образом расширительную петлю 443 на левой боковой поверхности 440 соседней секции 410 платформы, пока все язычки 453 не будут зацеплять всю соответствующую боковую поверхность 450. В альтернативном варианте осуществления два язычка могут быть использованы в любой комбинации местоположений. В других вариантах осуществления могут быть применены один или более язычков.
[00119] Обращаясь все еще к Фиг. 12A, две копланарных щели 477 расположены на внутренней поверхности 475 приблизительно на полпути между верхней поверхностью 460 и нижней поверхностью 420, и каждая щель 477 протягивается в осевом направлении наружу от внутренней поверхности 475 перпендикулярно центральной оси 405, по направлению к задней поверхности 430. В настоящем варианте осуществления одна щель 477 расположена близко к левой боковине 440, и одна щель 477 расположена близко к правой боковине 450. В альтернативном варианте осуществления одна или более щелей 477 могут быть использованы в любой комбинации местоположений.
[00120] Обращаясь теперь к Фиг. 11, верхняя поверхность 470a центральной зоны является параллельной нижней поверхности 470c, и как верхняя, так и нижняя поверхности 470a, 470c, соответственно, лежат в плоскости, ориентированной перпендикулярно центральной оси 405. Центральная зона 470 имеет длину L470 (которая измерена горизонтально между двумя противоположными горизонтальными поверхностями 470b) предпочтительно между 10,0 и 20,0 дюймами; высоту H470 (которая измерена вертикально между верхней и нижней поверхностями 470a, 470c) предпочтительно между 0,2 и 2,0 дюймами; и каждая боковая поверхность 470b имеет ширину W470 (которая измерена между соседними боковыми поверхностями 470b слева и справа) предпочтительно между 3,0 и 8,0 дюймами. Хотя показана в настоящем варианте осуществления параллельно нижней поверхности 420, верхняя поверхность 470a центральной зоны может быть изогнута так, что фрагмент верхней поверхности 470a, который пересекает центральную ось 405, расположен в осевом направлении ниже пересечения верхней поверхности 470a и боковых поверхностей 470b.
[00121] Центральная зона 470 дополнительно содержит два язычка 473 на каждой боковине 470b. Каждый язычок 473 протягивается наружу ортогонально от боковины 470b. В настоящем варианте осуществления язычки 473 расположены приблизительно на полпути между верхней и нижней поверхностями 470a, 470c, соответственно, и расположены с интервалом горизонтально. Язычки 473 сконфигурированы так, что оба язычка 473 скользящим образом зацепляются в соответствующие щели 477, расположенные во внутренней поверхности 475 секции 410 платформы. В других вариантах осуществления язычки 473 могут быть расположены ближе либо к верхней, либо к нижней поверхности 470a, 470c, соответственно.
[00122] Обращаясь теперь к Фиг. 14-16, структура 500 соединения платформы содержит восемь соседних по окружности, как правило, трапециевидных соединительных пластин 510, расположенных вокруг центральной оси 405. Каждая пластина 510 дополнительно содержит верхнюю поверхность 560 напротив нижней поверхности 520, левую боковую стенку 540 и правую боковую стенку 550. Пластина 510 дополнительно содержит шесть сквозных отверстий 575, распределенных по верхней поверхности 560, которые протягиваются в осевом направлении вниз насквозь к нижней поверхности 520. Сквозные отверстия 575 все могут иметь одинаковый диаметр или могут иметь различные диаметры. Сквозные отверстия 575 предоставляют возможность креплениям 585 проходить сквозь них. В целом любое крепление, известное в области техники, включающее в себя, но не только, винты (показанные на Фиг. 14 и 16), гайки и болты, крепления на защелках и запрессовываемые крепления, могут быть использованы. Соединительные пластины 510 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[00123] Каждая пластина 510 сконфигурирована, чтобы вставляться во внутренний канал 491 так, что верхняя поверхность 560 соединительной пластины 510 упирается в верхнюю поверхность 491c внутреннего канала, левая боковая стенка 540 соединительной пластины 510 расположена близко к левой боковой поверхности 440 секции 410 платформы, а правая боковая стенка 550 соединительной пластины 510 расположена близко к правой боковой поверхности 450 секции 410 платформы. Крепления 585 тогда прикрепляют пластину 510 к внутреннему каналу 491 секции платформы.
[00124] Все еще обращаясь к Фиг. 14-16, левая боковая стенка 540 содержит верхнюю кромку 540a напротив нижней кромки 540b и заднюю кромку 540c напротив внутренней кромки 540d. Левая боковая стенка 540 протягивается в осевом направлении вниз от верхней поверхности 560 к нижней кромке 540b и имеет два сквозных отверстия 545, расположенных приблизительно на полпути между верхней и нижней кромками 540a, 540b, соответственно. В настоящем варианте осуществления сквозные отверстия 545 приблизительно равномерно распределены горизонтально по левой боковой стенке 540. В других вариантах осуществления сквозные отверстия 545 могут быть расположены в любых подходящих конфигурациях, известных в области техники.
[00125] Аналогично, правая боковая стенка 550 содержит верхнюю кромку 550a напротив нижней кромки 550b и заднюю кромку 550c напротив внутренней кромки 550. Правая боковая стенка 550 протягивается в осевом направлении вниз от верхней поверхности 560 к нижней кромке 550b и имеет два сквозных отверстия 555, расположенных приблизительно на полпути между верхней и нижней кромками 550a, 550b, соответственно. В настоящем варианте осуществления сквозные отверстия 555 приблизительно равномерно распределены горизонтально по левой боковой стенке 550. В других вариантах осуществления сквозные отверстия 555 могут быть расположены в любых подходящих конфигурациях, известных в области техники.
[00126] Все еще обращаясь к Фиг. 14-16, сквозные отверстия 545, 555 расположены на левой и правой боковых стенках 540, 550, соответственно, так что когда левая боковая стенка 540 одной соединительной пластины 510 упирается в правую боковую стенку 550 другой соединительной пластины 510, сквозные отверстия 545, 555 как на левой, так и на правой боковых стенках 540, 550, соответственно, совмещаются и предоставляют возможность креплению 565 проходить сквозь них. Любое крепление, известное в области техники, включающее в себя, но не только, крепления гайкой и болтом (показаны на Фиг. 16), винты, крепления на защелках и запрессовываемые крепления, может быть использовано. После того как каждая пластина 510 установлена во внутренний канал 491 секции платформы и закреплена с помощью креплений 585, как ранее описано, левая боковая стенка 540 каждой пластины прикрепляется к правой боковой стенке 550 пластины соседней секции 410 платформы, пока все секции 410 платформы не будут скреплены вместе.
[00127] В настоящем варианте осуществления угол A510 между соседними соединительными пластинами 510 равен 135 градусам. Следует понимать, что угол A510 зависит от числа соединительных пластин 510, использованных, чтобы формировать структуру 500 соединения платформы. Например, в варианте осуществления структура 500 соединения платформы может состоять из шести секций 510, тогда угол A510 будет равен 120 градусам. В другом варианте осуществления структура 500 соединения платформы может состоять из девяти секций 510 с углом A510 в 140 градусов.
[00128] Обращаясь теперь к Фиг. 14 и 17A, основание 600 содержит восемь трубчатых элементов 610, имеющих прямоугольное поперечное сечение и соединенных друг с другом с помощью восьми угловых соединителей 620 и креплений 635. Каждый трубчатый элемент 610 имеет верхнюю поверхность 610a напротив нижней поверхности 610b, левый конец 610c напротив правого конца 610d и внутреннюю поверхность 610e напротив внешней поверхности 610f. Каждый трубчатый элемент 610 имеет два высверленных отверстия 611, расположенных на верхней поверхности 610a близко к левому концу 610c, и два высверленных отверстия 611, расположенных на верхней поверхности 610a близко к правому концу 610d. Все трубчатые элементы 610, как правило, имеют одинаковые габаритные размеры, включающие в себя размеры, позиционирующие высверленные отверстия 611. Трубчатый элемент 610 может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[00129] Обращаясь теперь к Фиг. 18, каждый угловой соединитель 620 содержит центральную угловую основную часть 623, в целом кубовидную левую вставку 627, в целом кубовидную правую вставку 629 и упор 630 для ступней (см. Фиг. 17A). Центральная угловая основная часть 623 имеет верхнюю поверхность 621 напротив нижней поверхности 622, наружную угловую сторону 624, имеющую левую половину 624a и правую половину 624b, и внутреннюю угловую сторону 625, имеющую левую половину 625a и правую половину 625b. Верхняя поверхность 621 основной части имеет левую кромку 621a и правую кромку 621b; а нижняя поверхность 622 основной части имеет левую кромку 622a и правую кромку 622b. Угловой соединитель 620 может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры. Упор 630 для ступней может быть выполнен из любого подходящего материала, известного в области техники, включающего в себя, но не только, резины или полимеры.
[00130] Обращаясь теперь к Фиг. 14 и 18, в настоящем варианте осуществления угол A624 сгиба в каждом угловом соединителе 620 (т.е. угол A624 между левой половиной 625a и правой половиной 624b угловой стороны 624) равен 135 градусам. Следует понимать, что угол A624 зависит от числа трубчатых элементов 610, использованных, чтобы формировать основание 600. Например, в варианте осуществления основание 600 может состоять из шести трубчатых элементов 610, тогда угол A624 будет равен 120 градусам. В другом варианте осуществления основание 600 может состоять из девяти трубчатых элементов 610 с углом A624 в 140 градусов.
[00131] Левая вставка 627 имеет верхнюю поверхность 627a напротив нижней поверхности 627b, торцевую поверхность 627c, расположенную ортогонально и протягивающуюся между верхней и нижней поверхностями 627a, 672b, соответственно, и внешнюю боковую поверхность 627d противоположную внутренней боковой поверхности 627e, расположенной ортогонально и протягивающейся между верхней и нижней поверхностями 627a, 627b, соответственно. Левая вставка 627 дополнительно содержит два просверленных отверстия 615 в верхней поверхности 627a, расположенных приблизительно на полпути между левой кромкой 621a и торцевой поверхностью 627c; одно просверленное отверстие 615, расположенное близко к внешней боковой поверхности 627d, и одно просверленное отверстие, расположенное близко к внутренней боковой поверхности 627e. Дополнительно, левая вставка 627 имеет слегка меньшие размеры, так что выступ 613 формируется по всей границе между левой вставкой 627 и центральной угловой основной часть 623 (т.е. выступ 613 сформирован на границах (1) верхней поверхности 627a и левой кромки 621a; (2) нижней поверхности 627b и левой кромки 622a; (3) внешней боковой поверхности 627d и внешней угловой левой половины 624a; и (4) внутренней боковой поверхности 627c и внутренней угловой левой половины 625a).
[00132] Обращаясь теперь к Фиг. 18, правая вставка 629 имеет верхнюю поверхность 629a напротив нижней поверхности 629b, торцевую поверхность 629c, расположенную ортогонально и протягивающуюся между верхней и нижней поверхностями 627a, 627b, соответственно, и внешнюю боковую поверхность 629d напротив внутренней боковой поверхности 629e, расположенную ортогонально и протягивающуюся между верхней и нижней поверхностями 627a, 627b, соответственно. Правая вставка 629 дополнительно содержит два просверленных отверстия 615 в верхней поверхности 629a, расположенных приблизительно на полпути между правой кромкой 621b и торцевой поверхностью 629c; одно просверленное отверстие 615, расположенное близко к внешней боковой поверхности 629d, и одно просверленное отверстие, расположенное близко к внутренней боковой поверхности 629e. Дополнительно, правая вставка 629 имеет слегка меньшие размеры, так что выступ 613 формируется по всей границе между правой вставкой 629 и центральной угловой основной частью 623 (т.е. выступ 613 формируется на границах (1) верхней поверхности 629a и правой кромки 621b; (2) нижней поверхности 629b и правой кромки 622b; (3) внешней боковой поверхности 629d и внешней угловой правой половины 624b; и (4) внутренней боковой поверхности 629c и внутренней угловой правой половины 625b).
[00133] Обращаясь все еще к Фиг. 14 и 18, в настоящем варианте осуществления левая и правая вставки 627, 629, соответственно, каждого углового соединителя 620 скользящим образом зацепляют правый и левый концы 610d, 610c, соответственно, каждого трубчатого элемента 610, так что формируется восьмиугольная форма. Каждая левая вставка 627 сконфигурирована, чтобы скользить в трубчатый правый конец 610d, так что просверленные отверстия 611 трубчатых элементов 610 совмещаются с просверленными отверстиями 615 углового соединителя 620. Крепление 635 затем вставляется в совмещенные просверленные отверстия 611, 615, чтобы прикреплять угловой аналогично сконфигурированы, чтобы скользить в трубчатый левый конец 610c, так что просверленные отверстия 611 трубчатых элементов 610 совмещаются с просверленными отверстиями 615 углового соединителя 620. Крепление 635 затем вставляется в совмещенные просверленные отверстия 611, 615, чтобы прикреплять угловой соединитель 620 к трубчатому элементу 610. Любое крепление, известное в области техники, включающее в себя, но не только, винты (показаны на Фиг. 14, 17A и 17B), крепления на защелках и запрессовываемые крепления, может быть использовано. В альтернативном варианте осуществления угловые соединители 620 приварены к трубчатым элементам 610. В настоящем варианте осуществления, после того как все крепления 635 находятся на месте, и угловые соединители 620 прикреплены к концам трубчатых элементов 610, платформа 400 может затем быть помещена на основание 600, так что основание 600 располагается в канале 490 платформы.
[00134] В настоящем варианте осуществления граница между вставками 627, 629 и центральной угловой основной частью 623 предусматривает выступ 613; однако в других вариантах осуществления угловой соединитель 620 не должен содержать выступ. В настоящем варианте осуществления упоры 630 для ступней расположены на дне угловых соединителей; однако в других вариантах осуществления упоры для ступней могут быть расположены на дне секций 410 платформы, центральной зоны 470 или любой их комбинации.
[00135] Обращаясь теперь к Фиг. 17A и 17B, в этом варианте осуществления узел поддержки со страховочным поясом или поддерживающая структура 700 со страховочным поясом включает в себя пару расставленными с интервалом по окружности вертикальных элементов 710, пару устройств 720 сопряжения с основанием, соединяющих структуру 700 с основанием 600, пару соединительных балок 730, протягивающихся между устройствами 720 сопряжения и элементами 710, пару регулируемых по высоте балок 740, выдвигающихся из элементов 710, и поддерживающий пояс или гало 750, расположенный между балками 740. Каждый вертикальный элемент 710 является кубическим, трубчатым и имеет внутреннюю поверхность 710a напротив внешней поверхности 710b, левую поверхность 710c напротив правой поверхности 710d и открытую верхнюю поверхность 710e напротив открытой нижней поверхности 710f. Вертикальные элементы 710 дополнительно содержат множество сквозных отверстий 715, которые протягиваются между и сквозь внутреннюю и внешнюю поверхности 710a, 710b, соответственно. Проходные отверстия 715 расположены горизонтально на полпути между левой и правой поверхностями 710c, 710d, соответственно, и вертикально расположены с равномерными интервалами. Вертикальные элементы 710 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[00136] Каждое устройство 720 сопряжения с основанием является кубовидным, трубчатым и имеет внутреннюю поверхность 720a напротив внешней поверхности 720b, верхнюю левую поверхность 720c напротив открытой правой поверхности 720d и верхнюю поверхность 720e напротив нижней поверхности 720f. Устройства 720 сопряжения с основанием дополнительно содержат четыре просверленных отверстия 725, которые протягиваются в осевом направлении вниз от верхней поверхности 720e, каждое просверленное отверстие 725 расположено близко к одному из четырех углов верхней поверхности 720e. Размеры устройства 720 сопряжения с основанием слегка больше, чем у трубчатого элемента 610, чтобы предоставлять возможность устройству 720 сопряжения основания скользить поверх трубчатого элемента 610. Крепления 728 прикрепляют устройство сопряжения основания к трубчатому элементу 610 основания. Устройства 720 сопряжения с основанием могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры. Любое крепление, известное в области техники, включающее в себя, но не только, крепления гайкой и болтом, винты (показаны на Фиг. 17A и 17B), крепления на защелках и запрессовываемые крепления, может быть использовано. В альтернативном варианте осуществления устройства 720 сопряжения с основанием приварены к трубчатым элементам 610.
[00137] Обращаясь все еще к Фиг. 17A и 17B, вертикальная трубка 710 соединяется с устройством 720 сопряжения с основанием через соединительную балку 730. Соединительная балка 730 является кубовидной и имеет внутреннюю поверхность 730a напротив внешней поверхности 730b, левую поверхность 730c напротив правой поверхности 730d и верхнюю поверхность 730e напротив нижней поверхности 730f. Внешняя поверхность 730b соединительной балки соединена с внутренней поверхность 710a вертикальной трубки, а внутренняя поверхность 730a соединительной балки соединена с внешней поверхностью 720b устройства сопряжения с основанием. Соединительная балка 730 может быть соединена с вертикальной трубкой 710 и устройством 720 сопряжения с основанием с помощью любого крепежного средства, известного в области техники, включающего в себя, но не только, сварку, крепления гайкой и болтом, винты, крепления на защелках и запрессовываемые крепления. В другом варианте осуществления вертикальная трубка 710, соединительная балка 730 и устройство 720 сопряжения с основанием могут быть монолитными или сформированы из одного фрагмента материала. Соединительная балка 730 может быть трубчатой или сплошной и может быть выполнена из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры.
[00138] Каждая регулируемая по высоте балка 740 является трубчатой и содержит три фрагмента – фрагмент 742 регулятора, наклонный фрагмент 744 и фрагмент 746 кольцевого интерфейса. Фрагмент 742 регулятора является кубовидным, трубчатым и имеет внутреннюю поверхность 742a напротив внешней поверхности 742b, левую поверхность 742c напротив правой поверхности 742d и открытую нижнюю поверхность 710f. Каждый регулируемый фрагмент 742 дополнительно содержит множество сквозных отверстий 745, которые протягиваются между и сквозь внутреннюю и внешнюю поверхности 742a, 742b, соответственно. Проходные отверстия 715 расположены горизонтально на полпути между левой и правой поверхностями 742c, 742d, соответственно, и вертикально расположены с равномерными интервалами. Фрагмент 742 регулятора расположен внутри вертикальной трубки 710, а сквозные отверстия 745 расположены на фрагменте 742 регулятора так, что вертикальное расстояние между каждым сквозным отверстием 745 равно вертикальному расстоянию между сквозными отверстиями 715 в вертикальной трубке 710, таким образом, поднятие или опускание регулируемой по высоте балки 740 в вертикальной трубке 710 предоставляет возможность сквозным отверстиям 715, 745 становиться совмещенными. После того как сквозные отверстия 715, 745 вертикальной трубки 710 и регулируемый фрагмент 742, соответственно, совмещены, блокирующий механизм 718 может быть вставлен сквозь совмещенные сквозные отверстия 715, 745. Наклонный фрагмент 744 является трубчатым и протягивается в осевом направлении вверх и радиально внутрь от фрагмента 742 регулятора по направлению к гало-опоре 750. Фрагмент 746 кольцевого интерфейса протягивается в осевом направлении вверх от верха наклонного фрагмента и соединяется с гало-опорой 750. Фрагмент 746 кольцевого интерфейса может быть соединен с гало-опорой 750 с помощью любого крепежного средства, известного в области техники, включающего в себя, но не только, винты, гайки и болты, крепления на защелках и запрессовываемые крепления. Вертикальные элементы 710 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры. Любой блокирующий механизм 718, известный в области техники, включающий в себя, но не только, замыкающий штифт, шаровой палец и крепления гайкой и болтом, может быть использован. В альтернативном варианте осуществления два или более блокирующих механизмов 718 могут быть вставлены через два или более совмещенных сквозных отверстий 715, 745.
[00139] Обращаясь теперь к Фиг. 17A, 17B, 19 и 20, фрагменты 746 кольцевого интерфейса (и вся регулируемая по высоте балка 740) соединены с и расположены вокруг гало-опоры 750 под углом A740, угол A740 определен плоскостями, которые вертикально делят пополам внутреннюю поверхность 710a каждого вертикального элемента 710, который предпочтительно равен 135,0 градусам. В других вариантах осуществления этот угол A740 может быть 180,0 градусов или меньше, в зависимости от числа использованных секций 410 платформ, например. Общая высота H750 (которая измерена вертикально между вертикальной трубчатой нижней поверхностью 710f и верхней поверхностью 750a опорного кольца верхней поверхности) опорного кольца 750 может регулироваться, как ранее описано, чтобы приспосабливаться к пользователям разной высоты. Диапазон в высоте H491 опорного кольца находится предпочтительно между 30,0 и 50,0 дюймами. В этом варианте осуществления гало-опора 750 является закрытой петлевой структурой, предназначенной, чтобы протягиваться полностью вокруг пользователя. Чтобы размещать пользователя, гало-опора 70 предпочтительно имеет минимальную внутреннюю ширину W750 между 15 и 25 дюймами. Хотя гало 750 является закрытой структурой, которая протягивается полностью вокруг пользователя в этом варианте осуществления, в других вариантах осуществления гало-опора (например, гало-опора 750) может быть открытой структурой, которая протягивается частично вокруг пользователя (например, C-образной формой).
[00140] Обращаясь теперь к Фиг. 17A, 17B, 20 и 21, гало-опора 750 протягивается вокруг вертикальной центральной оси 705 и имеет верхнюю поверхность 750a напротив нижней поверхности 750b и внутреннюю поверхность 750c напротив внешней поверхности 750d. В этом варианте осуществления гало-опора 750 является круглым кольцом и, таким образом, может также называться опорным кольцом 750. Следует понимать, что, поскольку опорное кольцо 750 является кольцеобразным в этом варианте осуществления, минимальная внутренняя ширина W750 равна внутреннему диаметру D750. Хотя гало-опора 750 является кольцеобразной в этом варианте осуществления, в других вариантах осуществления гало-опора (например, гало-опора 750) может иметь другие геометрические формы, такие как овальную, яйцевидную, прямоугольную, квадратную и т.д.
[00141] Опорное кольцо 750 дополнительно содержит опорную структуру 753, нижнее кольцо 755, верхнее кольцо 757 и дверцу 759 с защелкой 760 и петлей 765. В настоящем варианте осуществления опорная структура 753 обеспечивает жесткость, а также структуру, на которую должны присоединяться нижнее и верхнее кольца 755, 757, соответственно. Когда дверца 759 закрыта, опорная структура 753 перекрывает опорную структуру 753 в опорном кольце 750, предоставляя возможность опорному кольцу 750 поддерживать нагрузку. Опорная структура 753 может быть выполнена из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы или полимеры, и предпочтительно выполнена из полиэтилена высокой плотности (HDPE). Нижнее кольцо 755 имеет U-образное поперечное сечение и присоединено к опорной структуре 753, чтобы формировать нижнюю поверхность 750b и нижнюю часть как внутренней, так и внешней поверхностей 750c, 750d, соответственно. Верхнее кольцо 757 имеет перевернутое U-образное поперечное сечение и присоединено к опорной структуре 753, чтобы формировать верхнюю поверхность 750a и верхнюю часть как внутренней, так и внешней поверхностей 750c, 750d, соответственно. Нижнее и верхнее кольца 755, 757, соответственно, также содержат вырезы 756, чтобы размещать любое подходящее устройство крепления, известное в области техники, включающее в себя, но не только, винты, крепления на защелках и запрессовываемые крепления. Нижнее и верхнее кольца 755, 757, соответственно, могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры.
[00142] Дверца 759 содержит фрагмент опорного кольца 750, которое является подвижным посредством горизонтального поворачивания на петле 765 вдоль оси, параллельной центральной оси 405. Петля 765 в комбинации со штифтом 766 может применять любое подходящее средство, известное в области техники, включающее в себя, но не только, шаровой палец, блокирующий штифт и быстросъемный штифт. Когда находится в закрытом положении, защелка 760 зацепляет блокирующую пластину 761, расположенную на неподвижном фрагменте опорного кольца 750.
[00143] Обращаясь теперь к Фиг. 10 и 22, страховочный пояс 800 содержит в целом U-образную штангу 810, пару установочных элементов 820, пару вертикальных элементов 830, поясной ремень 840 и две структуры 850 сопряжения. U-образная штанга 810 является трубкой и лежит в плоскости, ортогональной центральной оси 405. На каждом конце U-образной штанги 810 установочный элемент 820 протягивается радиально наружу от U-образной штанги 810; и вертикальный элемент 830 протягивается в осевом направлении вниз от установочного элемента 820. В настоящем варианте осуществления установочный элемент 820 является квадратной трубчатой штангой, а вертикальный элемент 830 является вертикальной трубчатой штангой, которая дополнительно содержит вертикальную контактную структуру 835. Установочный элемент 820 и вертикальный элемент 830 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, металлы и полимеры. В настоящем варианте осуществления вертикальная контактная структура или пластина 835 скольжения прикреплена к внешней стороне вертикального элемента 830 с помощью гаек и болтов. Вертикальная контактная структура 835 может быть выполнена из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры, и предпочтительно выполнена из HDPE. Поясной ремень 840 присоединен с возможностью поправления к U-образной штанге 810 на каждой из внутренних сторон U-образного поперечного сечения. Поясной ремень 840 может быть присоединен к штанге 810 с помощью любого стандартного средства в области техники, включающего в себя, но не только, крепления-липучки, кнопки, гайки и болты, винты и клеи. Поясной ремень 840 может быть присоединен непосредственно к штанге 810 или может быть присоединен к кронштейну 815 (Фиг. 22), который затем присоединяется к штанге 810.
[00144] Обращаясь теперь к Фиг. 22, структура 850 сопряжения расположена на каждом установочном элементе 820. Каждая структура 850 сопряжения имеет трубчатое просверленное отверстие 851, расположенное в центральном фрагменте структуры 850 сопряжения, которое скользящим образом зацепляет установочный элемент 820. Структура 850 сопряжения содержит нижнюю горизонтальную контактную структуру или пластину 853 скольжения и верхнюю горизонтальную контактную структуру или пластину 857 скольжения, которые установлены напротив друг друга; таким образом, когда верхняя горизонтальная контактная структура 857 обращена вверх, нижняя горизонтальная контактная структура 853 обращена вниз к платформе 400 и наоборот. Расстояние D857 от центра трубчатого просверленного отверстия 851 вертикально вверх до верхней горизонтальной контактной структуры 857 больше расстояния D853 от центра трубчатого просверленного отверстия 851 вертикально вниз к нижней горизонтальной контактной структуре 853. Различие в расстоянии D853, D857 предоставляет возможность дополнительного уровня регулировки высоты, когда структура 850 сопряжения переворачивается. В настоящем варианте осуществления горизонтальные пластины 853, 857 скольжения прикреплены к противоположным внешним сторонам структур 850 сопряжения с помощью гаек и болтов. Структура 850 сопряжения имеет длину L850 предпочтительно между 4,0 и 10,0 дюймами и высоту (D853 плюс D857) предпочтительно между 2,0 и 8,0 дюймами. Горизонтальные пластины 853, 857 скольжения могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры, и предпочтительно выполнены из HDPE. Структура 850 сопряжения прикреплена к установочному элементу 820 с помощью блокирующего механизма 865. Блокирующий механизм 865 может быть любым креплением, известным в области техники, включающим в себя, но не только, замыкающий штифт, шаровой палец и крепления гайкой и болтом могут быть использованы.
[00145] Во время использования страховочный пояс 800 помещается в опорное кольцо 750 так, что структуры 850 сопряжения скользящим образом зацепляют опорное кольцо 750 и могут двигаться по окружности и радиально относительно опорного кольца 750. Дополнительно, горизонтальные пластины 853, 857 скольжения (либо нижняя, либо верхняя, соответственно) покоятся на и находятся в контакте с верхней поверхностью 750a, а вертикальная контактная структура 835 расположена во внутренней поверхности 750c опорного кольца 750, предоставляет возможность легкого маневрирования пользователя. Пользователь может двигаться вверх и вниз над опорным кольцом 750, так что структуры 850 сопряжения больше не зацепляют опорное кольцо 750 и вертикальная контактная структура 835 может или не может оставаться расположенной в пределах внутренней поверхности 750c опорного кольца 750. Как ранее описано, опорное кольцо 750 и контактные структуры, все выполнены из полимеров, которые предоставляют возможность контактным структурам 835, 853, 857 скользить по опорному кольцу 750.
[00146] Обращаясь теперь к Фиг. 23, показан вариант осуществления оболочки 900 для ступни для использования с вариантами осуществления локомоционных систем и платформ, описанных в данном документе. В этом варианте осуществления оболочка 900 для ступни содержит верхний фрагмент 910, подошву 930 и множество накладок 940-960, 980 с переменным коэффициентом трения. Когда используется в данном документе, термин "оболочка для ступней" ссылается на туфли или галоши. Галоша является оболочкой для ступни, которая, по меньшей мере, частично покрывает обувь владельца и, как правило, включает в себя подошву и средство для присоединения подошвы к обуви или телу владельца (например, ступне, лодыжке или ноге). Дополнительно, когда используются, чтобы описывать оболочку 900 для ступни, термины "верхняя сторона" или "нижняя сторона" могут быть использованы в целях описания с выражениями "верх", "верхний", "вверх" или "выше", означающими, как правило, направление к или ближе к концу оболочки 900 для ступни, ближайшему к носку 901, и с выражениями "низ", "ниже", "вниз" или "под", означающими, как правило, направление к или ближе к концу оболочки 900 для ступни, ближайшему к пятке 902. Общая длина и ширина оболочки 900 для ступни будет изменяться в зависимости от размера ступни владельца; таким образом, оболочка 900 для ступни может быть приспособлена, чтобы подгоняться под ступню любого размера. В настоящем варианте осуществления оболочка 900 для ступни может быть выполнена из любого подходящего материала, известного в области техники, включающего в себя, но не только, ткань, кожу или другой подходящий материал, известный в области техники.
[00147] Обращаясь все еще к Фиг. 23, подошва 930 оболочки 900 для ступни покрывает низ ступни владельца и соединяется с верхним фрагментом 910 по всему периметру ступни владельца. В этом варианте осуществления верхний фрагмент 910 и подошва содержат один непрерывный фрагмент материала.
[00148] Подошва 930 содержит три секции – передний отдел 935 стопы, средний отдел 965 стопы и задний отдел стопы 975. Секция 935 переднего отдела стопы включает в себя фрикционную накладку 940 носка и первую, вторую, третью и четвертую накладку 945, 950, 955, 960 переднего отдела стопы, соответственно. Фрикционная накладка 940 носка расположена на нижней стороне подошвы 930 близко к носку 901 или "верху" подошвы 930 и имеет два изогнутых или вырезанных фрагмента на нижнем конце фрикционной накладки 940. Фрикционная накладка 940 носка протягивается от верха носка 901 вниз к пятке 902 предпочтительно между 0,5 и 2,5 дюймами и от одной боковины 903 по всей ширине подошвы 930 к другой боковине 904. Фрикционная накладка 940 может быть круглой или любой другой формы, известной в области техники. Фрикционная накладка 940 может быть выполнена из любого подходящего материала, включающего в себя, но не только, ткань, кожу или полимеры. Первая фрикционная накладка 945 является в целом круглой и расположена ниже и рядом с фрикционной накладкой 940 носка в одном из вырезанных фрагментов на нижней поверхности фрикционной накладки 940 носка. Первая фрикционная накладка 945 имеет диаметр предпочтительно между 0,4 и 2,0 дюймами. Вторая фрикционная накладка 950 является в целом круглой и расположена ниже и рядом с фрикционной накладкой 940 носка в другом из двух вырезанных фрагментов на нижней поверхности фрикционной накладки 940 носка. Вторая фрикционная накладка 950 имеет диаметр предпочтительно между 0,4 и 2,0 дюймами. Третья фрикционная накладка 955 является в целом круглой и расположена на подошве 930 ниже и близко к первой фрикционной накладке 945. Третья фрикционная накладка 955 имеет диаметр предпочтительно между 0,4 и 2,0 дюймами. Четвертая фрикционная накладка 960 является в целом круглой и расположена на подошве 930 ниже и близко ко второй фрикционной накладке 950. Четвертая фрикционная накладка 960 имеет диаметр предпочтительно между 0,4 и 2,0 дюймами. Хотя показана в настоящем варианте осуществления с четырьмя фрикционными накладками 945, 950, 955, 960, в других вариантах осуществления секция 935 переднего отдела стопы может содержать три или меньше фрикционных накладок изменяющихся размеров. В еще других вариантах осуществления секция 935 переднего отдела стопы может содержать пять или более фрикционных накладок изменяющихся размеров.
[00149] Все еще обращаясь к Фиг. 23, секция 965 среднего отдела стопы содержит фрагмент оболочки 900 обуви, которая поддерживает свод стопы владельца. В этом варианте осуществления секция 965 среднего отдела стопы не содержит каких-либо фрикционных накладок. Однако в других вариантах осуществления секция 965 среднего отдела стопы может содержать одну или более фрикционных накладок изменяющихся размеров.
[00150] Секция 975 заднего отдела стопы содержит фрикционную накладку 980 пятки. Пятая фрикционная накладка 980 в целом имеет форму, аналогичную Фиг. 8 со своей стороны, и расположена на подошве 930 приблизительно по центру между боковинами 903, 904 и близко к пятке 902. Пятая фрикционная накладка 980 имеет ширину предпочтительно между 0,4 и 2,0 дюймами и высоту предпочтительно между 0,4 и 2,0 дюймами. Хотя показана в настоящем варианте осуществления с одной фрикционной накладкой 980 в других вариантах осуществления, секция 975 заднего отдела стопы может содержать две или более фрикционных накладок изменяющихся размеров и форм.
[00151] Все фрикционные накладки 940, 945, 950, 955, 960, 980 имеют толщину предпочтительно между 0,1 и 1,0 дюймом. Хотя большинство фрикционных накладок 940-960, 980 показаны в настоящем варианте осуществления как круглые, в других вариантах осуществления фрикционные накладки 940-960, 980 могут протягиваться от одной боковины 903 по всей ширине подошвы 930 к другой боковине 904. Фрикционные накладки 940-960, 980 могут быть выполнены из любого подходящего материала, известного в области техники, включающего в себя, но не только, полимеры, керамику, резину, ткань, стекловолокно или мех. Фрикционные накладки 940-960, 980 предпочтительно выполнены из полиэтилена или политетрафторэтилена, а более предпочтительно выполнены из полиэтилена высокой плотности. В другом варианте осуществления подошва 930 может содержать слой меха вместо фрикционных накладок. В другом варианте осуществления вся оболочка 900 для стопы может содержать мех или ткань. В другом варианте осуществления оболочки 900 для стоп могут содержать пластиковый мешок с низким коэффициентом трения, который обертывается вокруг обуви пользователя.
[00152] Поскольку верхняя поверхность 460 платформы наклонена, фрикционные накладки 940-960, 980 будут скользить вниз к центральной зоне 470 под действием силы тяжести. Легкость и интервал скольжения накладок 940-960, 980 на поверхности 460 платформы будут зависеть от коэффициента трения между накладками 940-960, 980 и поверхностью 460. Коэффициент трения может изменяться в зависимости от материала, выбранного как для поверхности 460 платформы, так и для накладок 940-960, 980. Таким образом, материал для фрикционных накладок может быть выбран на основе желаемого коэффициента трения.
[00153] Фрикционные накладки 940-960, 980 предпочтительно выполнены из материала, имеющего коэффициент сухого трения с поверхностью 460 платформы менее или равный 0,40 или коэффициент трения со смазочным материалом с поверхностью 460 платформы менее или равный 0,25. Кроме того, каждая фрикционная накладка 940-960, 980 может, но не должна, иметь различные коэффициенты трения. Различные коэффициенты трения могут быть достигнуты для различных фрагментов подошвы 930 галоши посредством изменения материалов каждой фрикционной накладки 940-960, 980. Таким образом, коэффициент трения отдельных фрикционных накладок 940-960, 980 может варьироваться между каждой фрикционной накладкой, предоставляя возможность фрикционной накладке 940 носка, например, иметь больший коэффициент трения, чем внутренние первая, вторая, третья, четвертая и пятая фрикционные накладки 945-960, 980. Увеличение коэффициента трения между фрикционной накладкой 940 носка и поверхностью 460 платформы предоставляет возможность большей устойчивости посредством уменьшения эффекта скольжения, когда пятка отрывается от поверхности 460 платформы.
[00154] Использование смазки может дополнительно снижать коэффициент трения между накладками 940-960, 980 и поверхностью 460 платформы. Могут быть использованы стандартные смазки в области техники, включающие в себя, но не только, силиконовые салфетки или аэрозоли на основе масла.
[00155] Чтобы использовать локомоционную систему 40, пользователь надевает оболочки 900 для ступней на обе ступни, вступает на платформу 400 и в центральную зону 470 и в опорное кольцо 750. Пользователь затем надевает страховочный пояс 800 и затем закрывает и защелкивает дверцу 759. Пользователь может затем применять устройство виртуальной реальности по своему выбору. В виртуальном окружении любое движение в физическом мире, выполненное пользователем, будет транслироваться в движение в виртуальном мире.
[00156] Пользователь может пользоваться свободой движения, находясь на платформе 400. Пользователь может выполнять первый шаг с отрывом первой ноги от центральной зоны 470 и на наклонную верхнюю поверхность 460. Когда пользователь выполняет второй шаг своей второй ногой, сила тяжести направляет первую ступню пользователя вниз по склону наклонной верхней поверхности 460 по направлению к центральной зоне 470. Низкий коэффициент трения между накладками 940-960, 980 оболочки для ступни и поверхностью 460 платформы предоставляет возможность оболочке 900 для ступни скользить по поверхности 460, и процесс повторяется. Пользователь, таким образом, имеет возможность поддерживать непрерывное идущее движение в виртуальном мире, в то же время двигаясь только в пределах периметра платформы 400.
[00157] Как ранее описано, наклонная верхняя поверхность 460 не должна содержать какие-либо каналы или канавки и все еще предоставляет возможность пользователю пользоваться свободой движения, находясь на платформе 400. Однако в предпочтительном варианте осуществления наклонная верхняя поверхность 460 включает в себя канавки 480, поскольку канавки уменьшают площадь контактной поверхности между платформой 400 и оболочками 900 для ступней, направляют ступню пользователя в центральную зону 470, предотвращают поперечное скольжение и красивы с эстетической точки зрения.
[00158] Обращаясь теперь к Фиг. 24, локомоционная система 40, описанная в данном документе, может быть использована в сочетании с системой 1000 виртуальной реальности, которая может содержать блок 1200 обработки, осуществляющий связь с одним или более устройствами 1100 обнаружения движения, устройством 1300 отображения и контроллером 1400. Компоненты системы виртуальной реальности могут быть отдельными устройствами или объединены в одно или более устройств. Устройства 1100 обнаружения движения обнаруживают, регистрируют и отслеживают движения и жесты пользователя и могут быть отдельными от платформы 400 локомоционной системы 40 (показаны как компонент 1100 на Фиг. 24), могут быть объединены в платформу 400 системы 40 (показаны как компонент 1100' на Фиг. 24), могут быть объединены в контроллер 1400 (показаны как компонент 1100'' на Фиг. 24), могут быть объединены в устройство 1300 отображения (показаны как компонент 1100'' на Фиг. 24) или любой их комбинацией, так что система 1000 виртуальной реальности содержит устройства обнаружения движения как отдельный компонент 1100, в локомоционной платформе 400 системы 40 (компонент 1100'), в контроллере 1400 (компонент 1100'') и/или в устройстве отображения (компонент 1100'''). В целом любое устройство обнаружения движения, известное в области техники, может быть использовано, включающее в себя, без ограничения, оптические устройства распознавания жестов или устройства, применяющие инерционные датчики движения, акселерометры, магнитометры, инфракрасные или оптические отслеживающие, емкостные датчики, встроенные в основание платформы 400, отслеживание с помощью системы глобального позиционирования, магнитное отслеживание или любая их комбинация, включающая в себя, но не только, Microsoft® Kinect™, Asus® Wavi Xtion™; Razer® Hydra, Sixense STEM, LEAP MOTION, MYO, INTEL PERCEPTUAL COMPUTING, Sony® Playstation® Move и Nintendo® Wii® Remote and Wii® Nunchuck.
[00159] Блок 1200 обработки использует программное обеспечение распознавания движения, чтобы обрабатывать входные сигналы от устройств 1100 обнаружения движения и контроллера 1400, распознавать движения и жесты пользователя на платформе 400 локомоционной системы 40 и отправлять выходные сигналы в программу виртуального окружения и устройству 1300 отображения. Программа виртуального окружения содержит игру или любое другое программное обеспечение трехмерного окружения, которое совместимо с блоком 1200 обработки и устройством 1300 отображения. Выходные сигналы, которые блок 1200 обработки отправляет программе виртуального окружения и устройству 1300 отображения, управляют движениями и действиями виртуального представления пользователя (т.е. аватара) на основе физических движений пользователя и соответственно изменяют спроецированный вид для пользователя соответствующим образом. В целом может быть использован любой блок обработки, известный в области техники, включающий в себя, без ограничения, персональный компьютер, портативный компьютер, игровую консоль, смартфон или планшет, который способен обрабатывать графику и запускать программное обеспечение, способное обрабатывать входные данные от устройств обнаружения движения и отправлять выходные сигналы программе виртуального окружения и устройству отображения. В альтернативном варианте осуществления блок 1200 обработки является неотъемлемым компонентом локомоционной системы 40.
[00160] Устройство 1300 отображения предоставляет визуальные изображения виртуального окружения пользователю. В целом может быть использовано любое устройство отображения, известное в области техники, включающее в себя, без ограничения, очки виртуальной реальности, включающие в себя, но не только, Oculus Rift, Vuzix® Wrap 920 VR Bundle; или проекторы, экраны и CAVE-окружения, которые могут или не могут быть объединены с блоком обработки.
[00161] Система 100 виртуальной реальности может дополнительно содержать проводной или беспроводной контроллер 1400, чтобы дополнительно помогать в управлении некоторыми действиями аватара в виртуальном окружении, такой как игровой манипулятор или джойстик (например, контроллер Xbox 360®, если совместим или сделан совместимым с блоком 1200 обработки и программой виртуального окружения), клавиатура и мышь, контроллер TacticalHaptics, контроллер Sixense STEM или пистолет (такой как Wii Zapper® с Wii Remote® и Wii Nunchuk®, если совместим или сделан совместимым с блоком 1200 обработки и программой виртуального окружения) или другое периферийное оружие. Как ранее обсуждалось, в других вариантах осуществления контроллер 1400 может также содержать устройства 1100 обнаружения движения.
[00162] Следует понимать, что пользователь может выполнять любое число движений во время использования локомоционной системы 10, 40, включающих в себя, но не только, приседание, подпрыгивание, сидение на корточках, ходьбу, бег, положение на коленях, стояние, поворот и движение вбок (т.е. шаги вбок). Таким образом, пользователь может двигаться по виртуальному окружению, двигаясь беспрепятственно в физическом мире и транслируя эти движения в движение в виртуальном окружении.
[00163] Как ранее описано, структура 700 поддержки со страховочным поясом содержит вертикальные элементы 710, соединенные с основанием 600 (через соединение с трубчатыми элементами 610) и протягивающиеся от плоской задней поверхности 430 платформы 400. Однако в других вариантах осуществления структура 700A поддержки со страховочным поясом может альтернативно быть соединена с платформой 400A другим средством, например, как показано на Фиг. 25, вертикальные элементы 710A усаживаются в сопрягающиеся гнезда 711 в радиальном внешнем фрагменте 499 секции 410A.
[00164] Как ранее описано, структура 700 поддержки со страховочным поясом содержит два вертикальных элемента 710, соединенных с платформой 400 (через трубчатые элементы 610 основания 600). Однако в других вариантах осуществления структура 700B поддержки со страховочным поясом может альтернативно быть соединена с платформой 400B посредством только одного вертикального элемента 710B, как показано на Фиг. 26.
[00165] Как ранее описано, дверца 759 содержит фрагмент опорного кольца 750, которое является подвижным посредством горизонтального поворачивания на петле 765 вдоль оси, параллельной центральной оси 405. Однако в других вариантах осуществления дверца 759C может альтернативно быть подвижной на петле 765C посредством поворачивания наружу горизонтально, вертикально или как комбинация того и другого. Например, как показано на Фиг. 27, дверца 759C может быть подвижной посредством вертикального поворачивания на петле 765C.
[00166] Как ранее описано, чтобы предохранять пользователя от падения, пользователь надевает пояс или поддерживающий ремень 840, который может быть закреплен вокруг талии пользователя. Этот поясной ремень 840 может содержать дополнительные ремешки, которые идут вокруг ног пользователя, в результате формируя страховочный пояс. Ремень 840 и дополнительные ремешки могут быть выполнены из кожи, ткани или любого другого материала и могут быть затянуты и застегнуты посредством креплений-липучек или любого другого механизма натяжения и застегивания ремня.
[00167] Как ранее описано, поясной ремень 840 прочно присоединен к U-образной штанге 810 на каждой из внутренних сторон U-образного поперечного сечения посредством любого стандартного крепления 215 в области техники. Однако в других вариантах осуществления поясной ремень 840 может быть соединен непосредственно со структурами сопряжения или фланцами 850 через крепления 815', как показано на Фиг. 28 и 29A-29Q. Кроме того, страховочный пояс 800' может содержать три или более фланцев 850', присоединенных к штанге 810'. Например, и как показано на Фиг. 28 и 30, страховочный пояс 800' может содержать четыре фланца 850'. Дополнительно, фланцы 850 могут быть сконфигурированы по-разному, как показано на Фиг. 28 и 29A-29Q. Как ранее описано, структуры сопряжения или фланцы 850 содержат горизонтальные пластины 853, 857 скольжения, которые скользят по опорному кольцу 750.
[00168] Обращаясь теперь к Фиг. 29A-29Q, положение фланцев 850A-850Q таково, что они находятся выше опорного кольца 750A-750Q, и фланцы 850A-850Q являются достаточно длинными, чтобы протягиваться поверх опорного кольца 750A-750Q, когда пользователь стоит в середине платформы 400. Фланцы 850A-850Q могут, таким образом, никогда не падать ниже опорного кольца 750A-750Q. По существу, поскольку фланцы 850A-850Q присоединены к поясному ремню 840A-840Q пользователя, пользователь будет заблокирован от падения посредством фланцев 850A-850Q, поскольку фланцы сами заблокированы от перемещения вниз посредством опорного кольца 750A-750Q.
[00169] Фланцы 850A-850Q могут быть выполнены из металла, пластика, дерева или любого другого материала с достаточной структурной прочностью. Они могут быть сплошной плоской поверхностью или круглыми трубками или любой другой фигурой или формой, которая обеспечивает желаемую поддержку. Фланцы 850A-850Q могут быть присоединены к ремню посредством заклепок или любого другого механизма присоединения, который является достаточно прочным, чтобы удерживать фланцы в прямом горизонтальном положении всякий раз, когда направленное вверх усилие прикладывается к ним. Поясной ремень 840A-840Q пользователя может быть усилен дополнительным гибким кольцом, чтобы обеспечивать достаточную структурную прочность, чтобы поддерживать фланцы на месте и в горизонтальном положении.
[00170] Фланец на Фиг. 29A имеет форму 751A крюка, который протягивается вертикально вниз от крайнего фланца 850A снаружи опорного кольца 750A. Аналогичные номера использованы, чтобы обозначать аналогичные части. Фланец 850B на Фиг. 29B имеет дополнительный вспомогательный крюк 752B, расположенный внутри опорного кольца 750B. Фланец 850C на Фиг. 29C имеет отклоняющуюся вниз кромку 751C снаружи опорного кольца 750C. Фланец 850D на Фиг. 29D имеет изогнутую кромку 751D снаружи опорного кольца 750D. Фланец 850E на Фиг. 29E имеет только внутренний крюк 752E, расположенный внутри опорного кольца 750E. Эти крюкообразные фланцы могут дополнительно быть присоединены к ремню через петли, обеспечивающие некоторую большую гибкость движения для этих крюков.
[00171] Аналогично, один или более фланцев могут быть отклоняющимися вверх или изогнутыми внутри опорного кольца. Например, фланец 850F на Фиг. 29F отклоняется вверх внутри опорного кольца 750F и затем протягивается горизонтально за опорное кольцо 750F. Фланец 850G на фиг 29g имеет крюк 751G, расположенный снаружи опорного кольца 750G. Фланец 850H на Фиг. 29H изогнут вверх внутри опорного кольца 750H и затем протягивается горизонтально за опорное кольцо 750H. Фланец 850I на Фиг. 29I отклоняется вверх внутри и протягивается за опорное кольцо 750I. Фланец 850J на Фиг. 29J изгибается вверх внутри опорного кольца 750J.
[00172] Чтобы предоставлять возможность различных размеров талии и регулируемости пользователем, фланцы могут иметь различные кромки, которые могут насаживаться на кольцо. Например, фланец 850K на Фиг. 29K изгибается выпуклым образом поверх опорного кольца 750K. Фланец 850L на Фиг. 29L отклоняется вверх внутри и протягивается за опорное кольцо 750L и дополнительно содержит язычки 852L, которые протягиваются вертикально вниз от фланца 850L, чтобы захватывать опорное кольцо 750L. Фланец 850M на Фиг. 29M изгибается выпуклым образом поверх и протягивается за опорное кольцо 750M и дополнительно содержит язычки 852M, которые протягиваются к опорному кольцу 750M от фланца 850M, чтобы захватывать опорное кольцо 750M. Фланец 850N на Фиг. 29N содержит форму 751N крюка, которая протягивается вертикально вниз от крайнего фланца 850N, и множество дополнительных крюкообразных форм 752N, чтобы предоставлять возможность множеству положений для крюкообразных форм 752N покоиться вокруг опорного кольца 750N. Фланец 850O на Фиг. 29O практически аналогичен фланцу на Фиг. 29N, но с фланцем, изгибающимся вверх и имеющим крюкообразные формы 751O, 752O.
[00173] Также, пользователь может регулировать уровень радиального ограничения посредством регулировки положения вертикального элемента 830. Например, как показано в альтернативном варианте осуществления на Фиг. 29P, перемещение штифта 830P дальше наружу приводит в результате к большему ограничению, ближе к пользователю – приводит в результате к меньшему ограничению. Вертикальные элементы 830P могут быть заменены изогнутыми или наклоняющимися вверх "бамперами" 752Q, как показано на Фиг. 29Q, которые присоединены к ремню 840Q, предоставляя замкнутую петлю. Как и с вертикальными элементами 820P, пользователь может регулировать верхнее положение бампера 830Q, чтобы регулировать уровень ограничения.
[00174] Возможна любая комбинация вышеописанного, чтобы предоставлять пользователю ограничение радиального движения, в то же время предоставляя возможность вращения и в то же время предоставляя возможность адаптации различных размеров талии пользователя и различных уровней радиального ограничения. Как ранее описано, страховочный ремень 840 прочно присоединен к штанге 810 и может быть регулируемым. В одном варианте осуществления, показанном на Фиг. 31, штанга 810'' является регулируемой через расширяемый соединитель 899, который соединяет фланец или структуру 850'' сопряжения. Расширяемый соединитель 899 предоставляет возможность некоторой гибкости вперед и назад для пользователя.
[00175] В то время как предпочтительные варианты осуществления были показаны и описаны, их модификация может быть выполнена специалистом в данной области техники без отступления от объема или идей в данном документе. Варианты осуществления, описанные в данном документе, являются только примерными, а не ограничивающими. Многие вариации и модификации систем, устройства и процессов, описанных в данном документе, возможны и находятся в рамках объема изобретения. Например, относительные габариты различных частей, материалы, из которых различные части выполнены, и другие параметры могут варьироваться. Соответственно, объем защиты не ограничен вариантами осуществления, описанными в данном документе, а ограничен только формулой изобретения, которая следует далее, объем которой должен включать в себя все эквиваленты объектов изобретения. Пока явно не заявлено иное, этапы в пункте о способе могут выполняться в любом порядке. Перечисление идентификаторов, таких как (a), (b), (c) или (1), (2), (3), перед этапами в пункте о способе не предназначено и не указывает конкретный порядок этапов, а скорее используется, чтобы упрощать последовательную ссылку на такие этапы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОКОМОЦИОННАЯ СИСТЕМА ДЛЯ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ И ОБОЛОЧКА ДЛЯ СТУПНИ ДЛЯ ИСПОЛЬЗОВАНИЯ С ТАКОЙ СИСТЕМОЙ | 2013 |
|
RU2769529C2 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВХОДНОГО СИГНАЛА ВО ВСЕНАПРАВЛЕННОЙ СИСТЕМЕ ДВИЖЕНИЯ | 2015 |
|
RU2687714C2 |
| ПРОТИВОСКОЛЬЗЯЩИЙ ОБУВНОЙ АКСЕССУАР ДЛЯ СПОРТИВНЫХ ИГР НА ПЛОЩАДКАХ | 2012 |
|
RU2591766C2 |
| ПЛАТФОРМА ДЛЯ ВЗАИМОДЕЙСТВИЯ ПОЛЬЗОВАТЕЛЯ С ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2024 |
|
RU2831283C1 |
| ХОЛОДИЛЬНИК И БЫТОВОЙ ЭЛЕКТРОПРИБОР | 2020 |
|
RU2789777C2 |
| ПОДВОДНЫЙ ДВИЖИТЕЛЬ | 2018 |
|
RU2753922C2 |
| Устройство для тренировки мышц ног | 2019 |
|
RU2706437C1 |
| БАЛАНСИРОВОЧНЫЙ ШАРНИР | 2015 |
|
RU2698681C2 |
| ХОЛОДИЛЬНИК | 2021 |
|
RU2773525C1 |
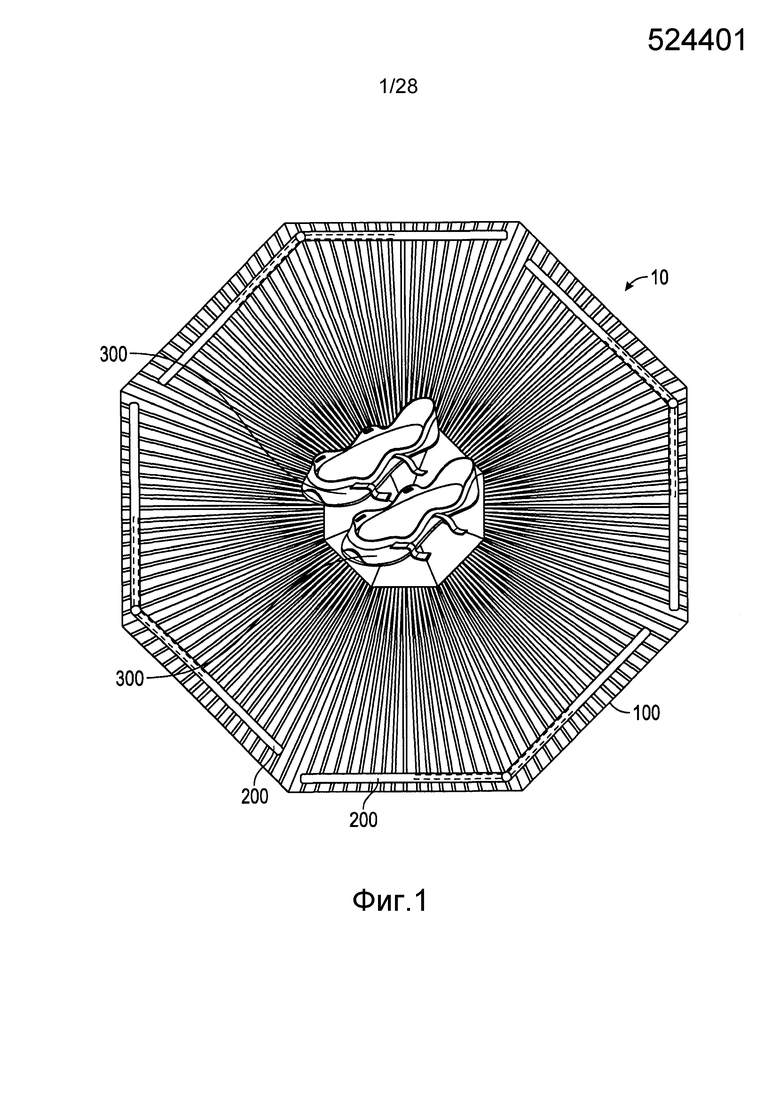
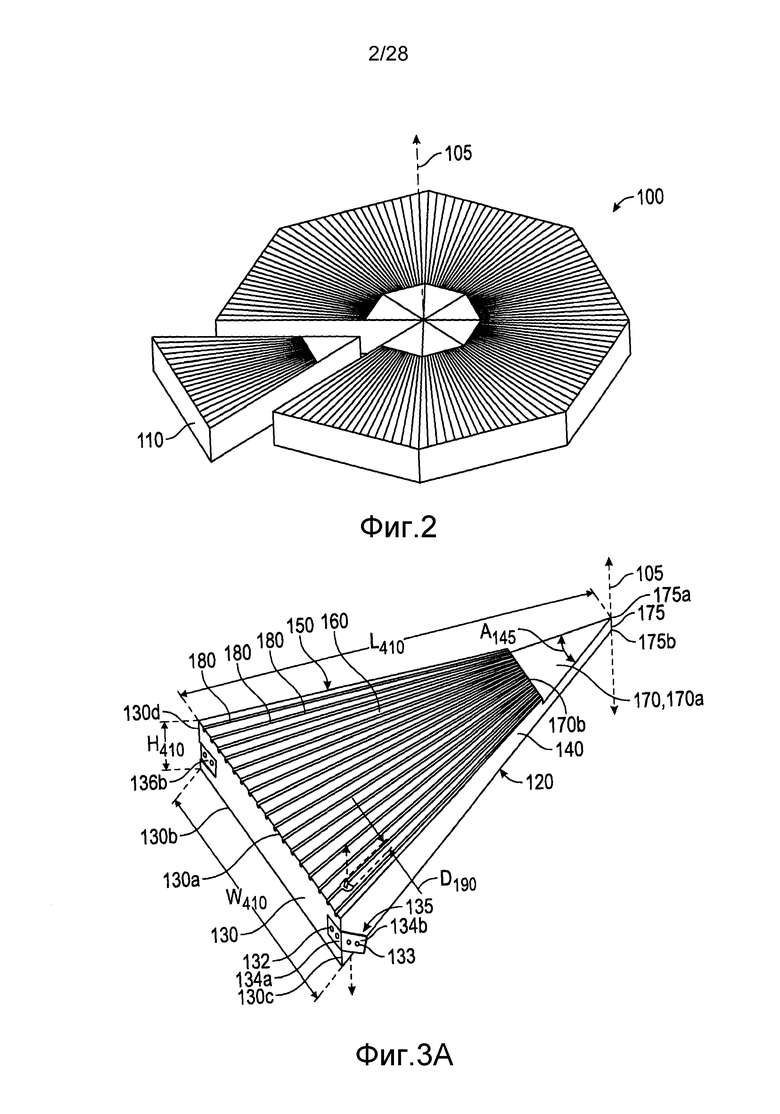
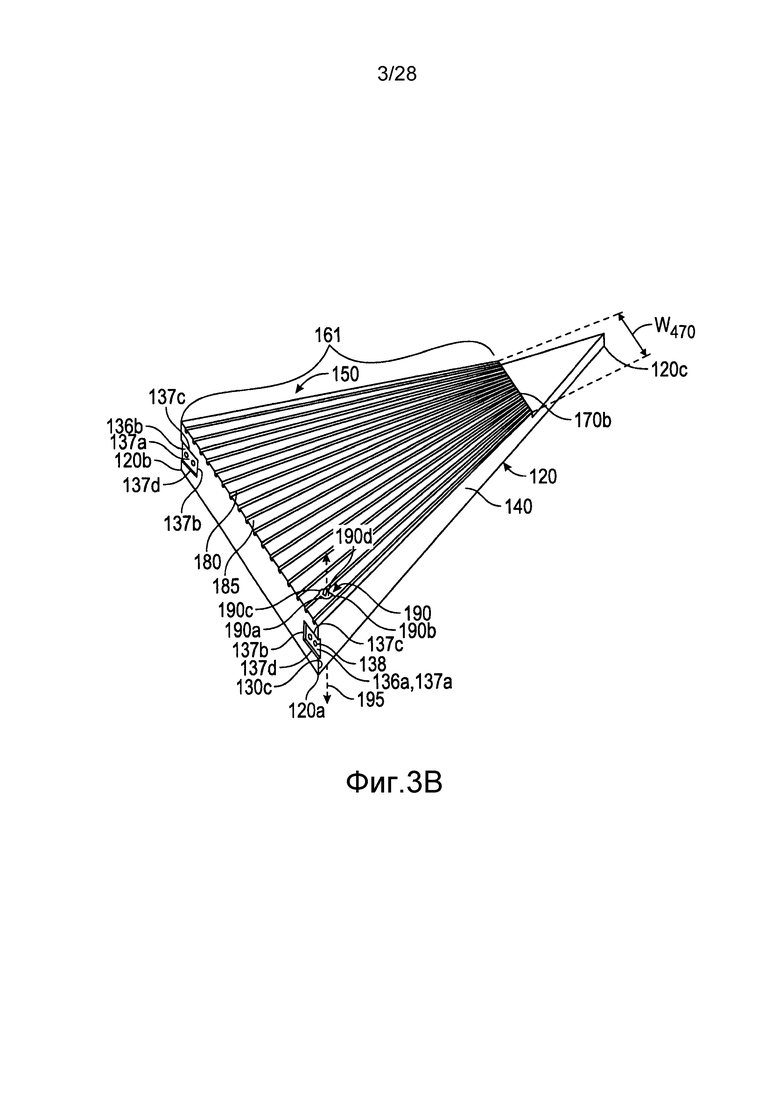
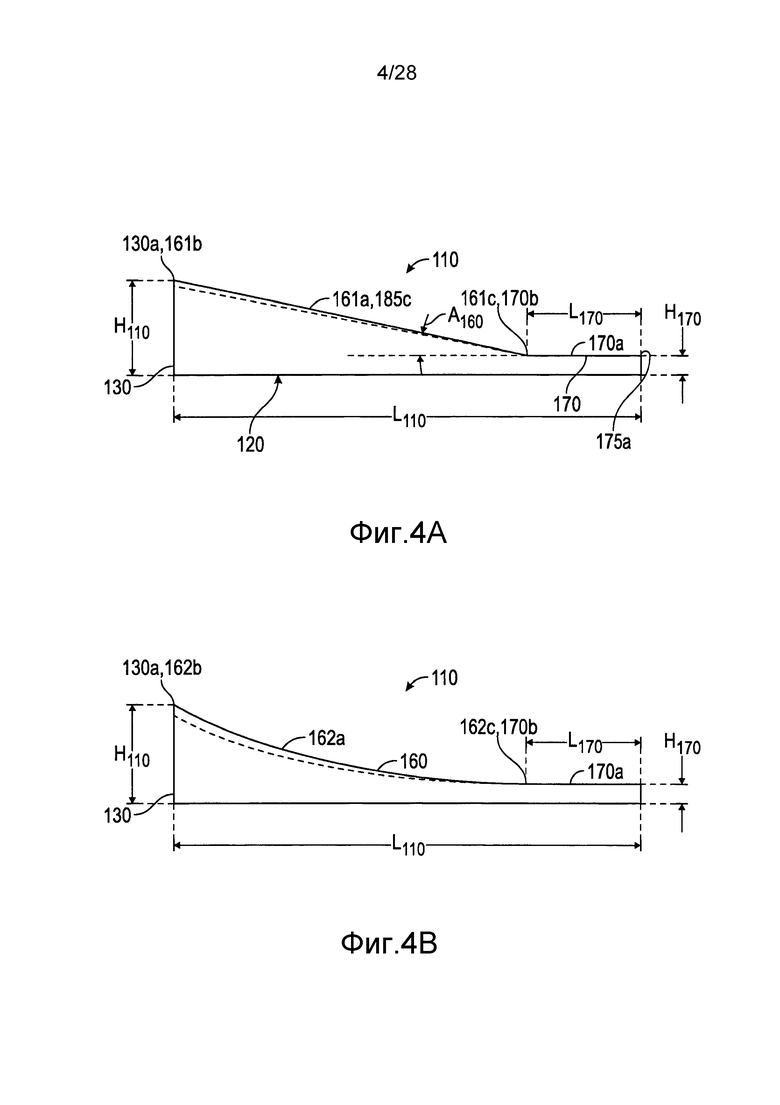
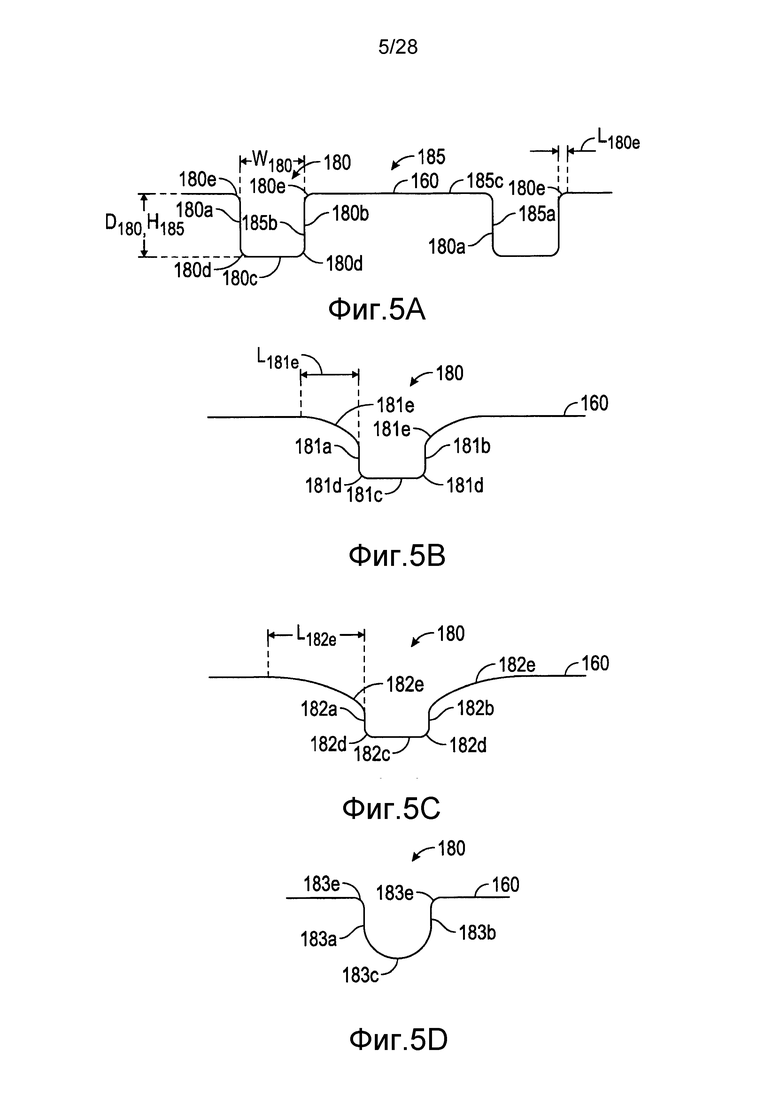
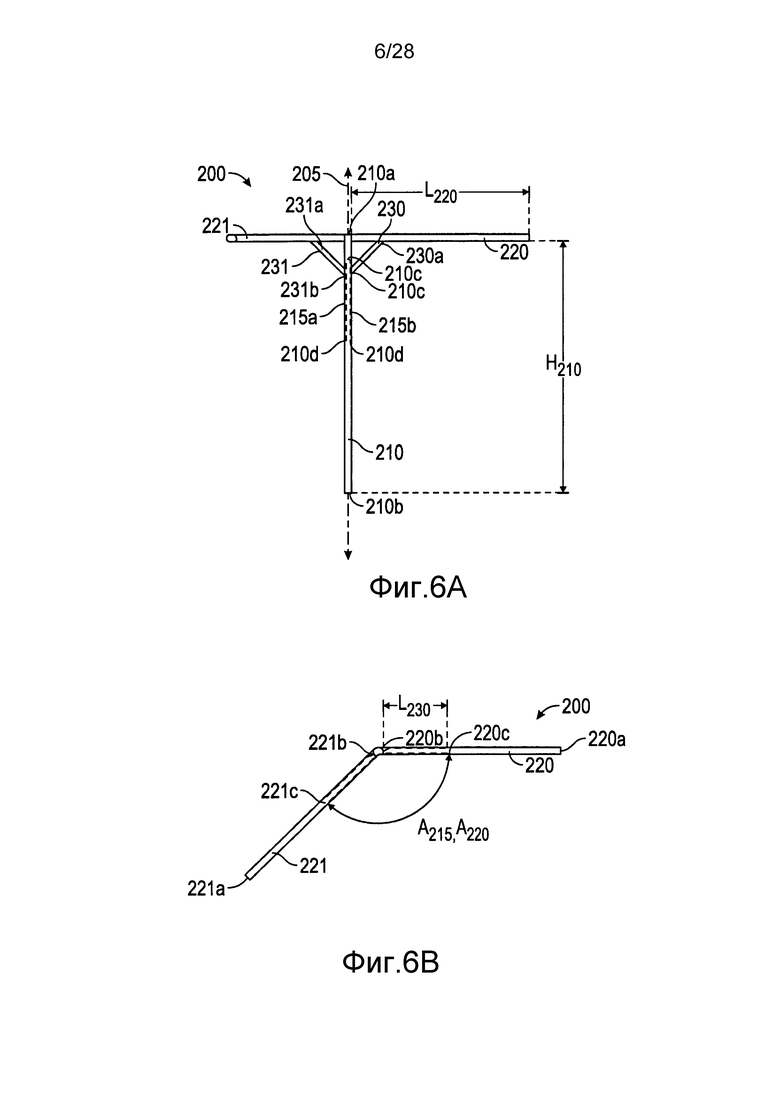
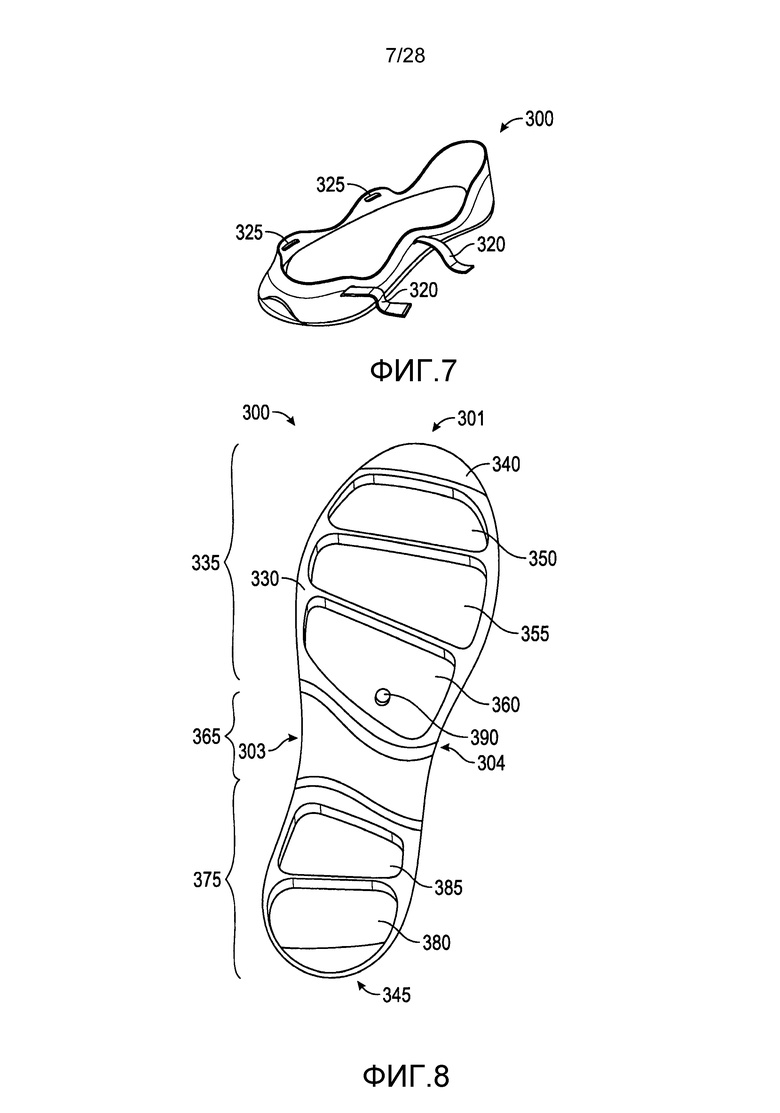
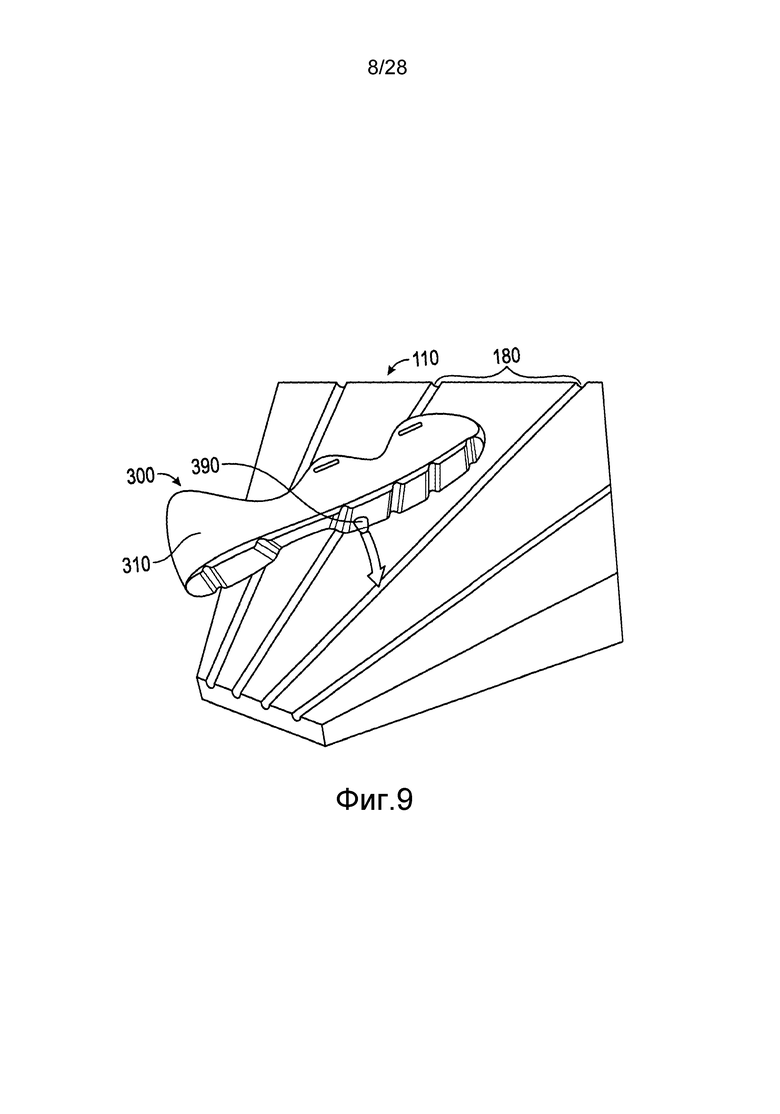
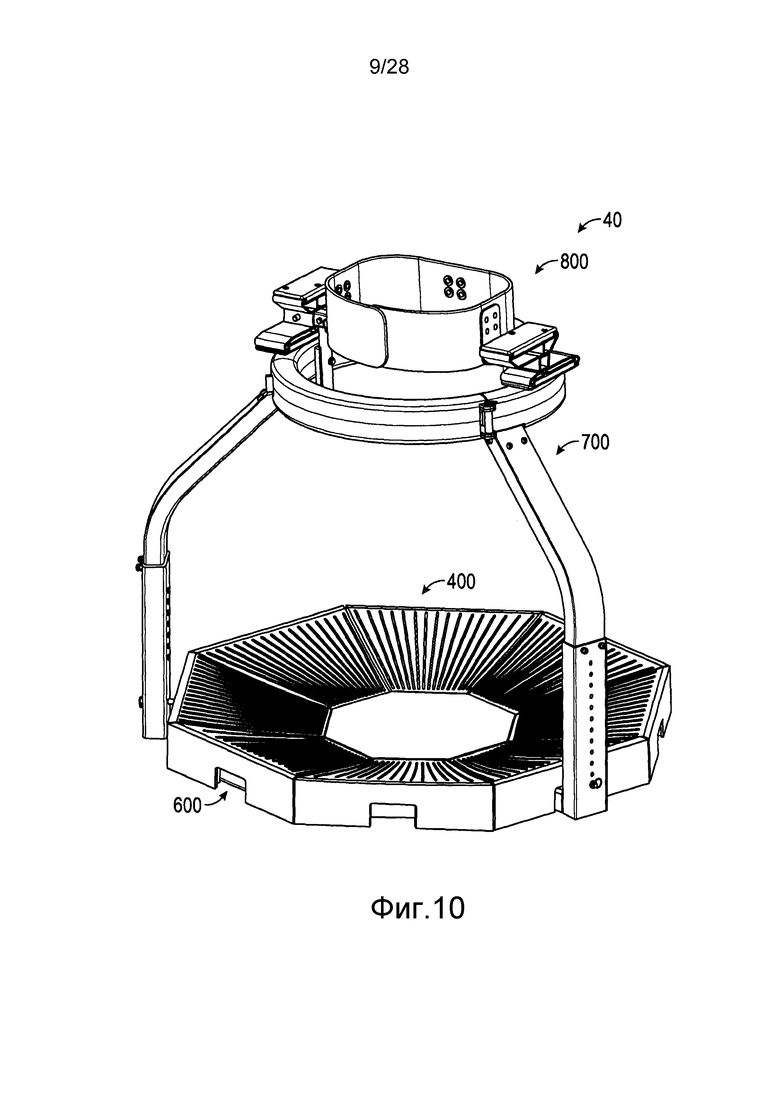

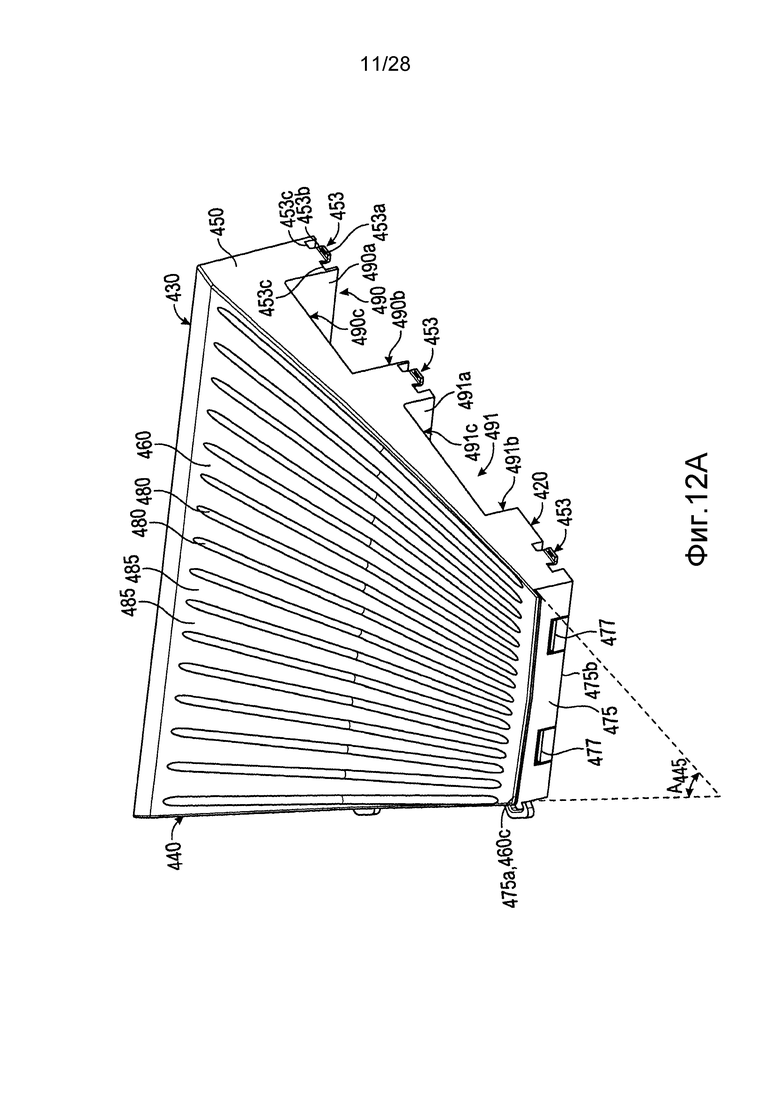
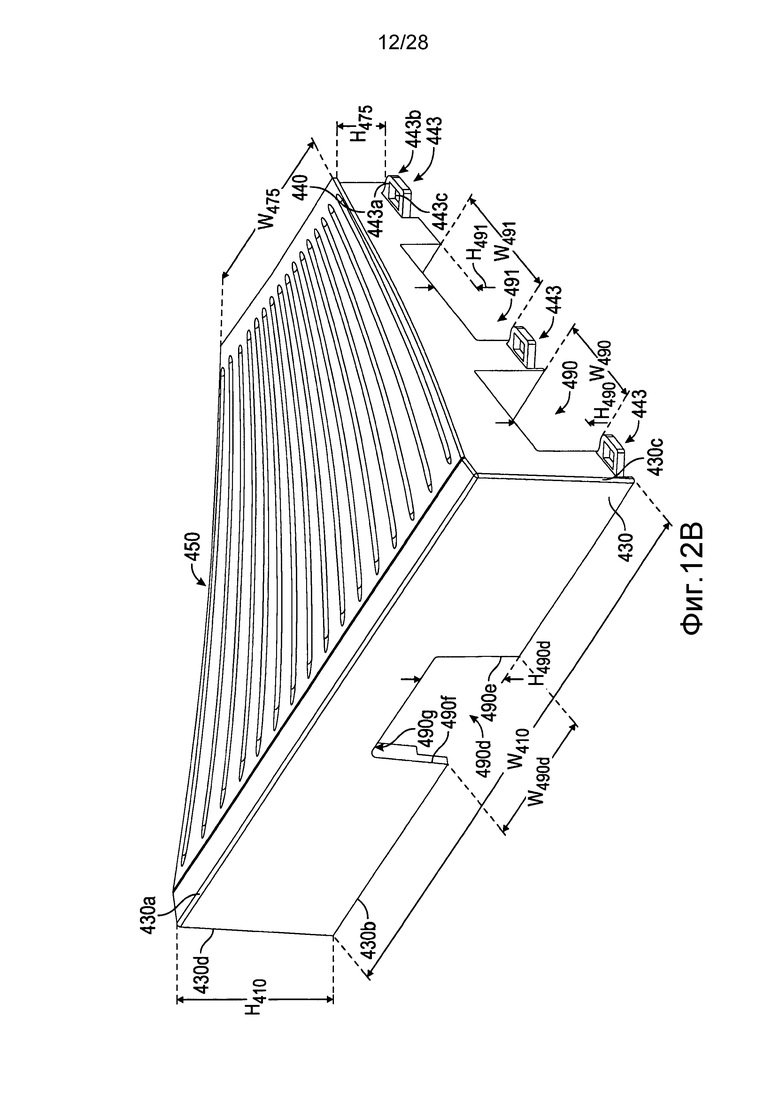
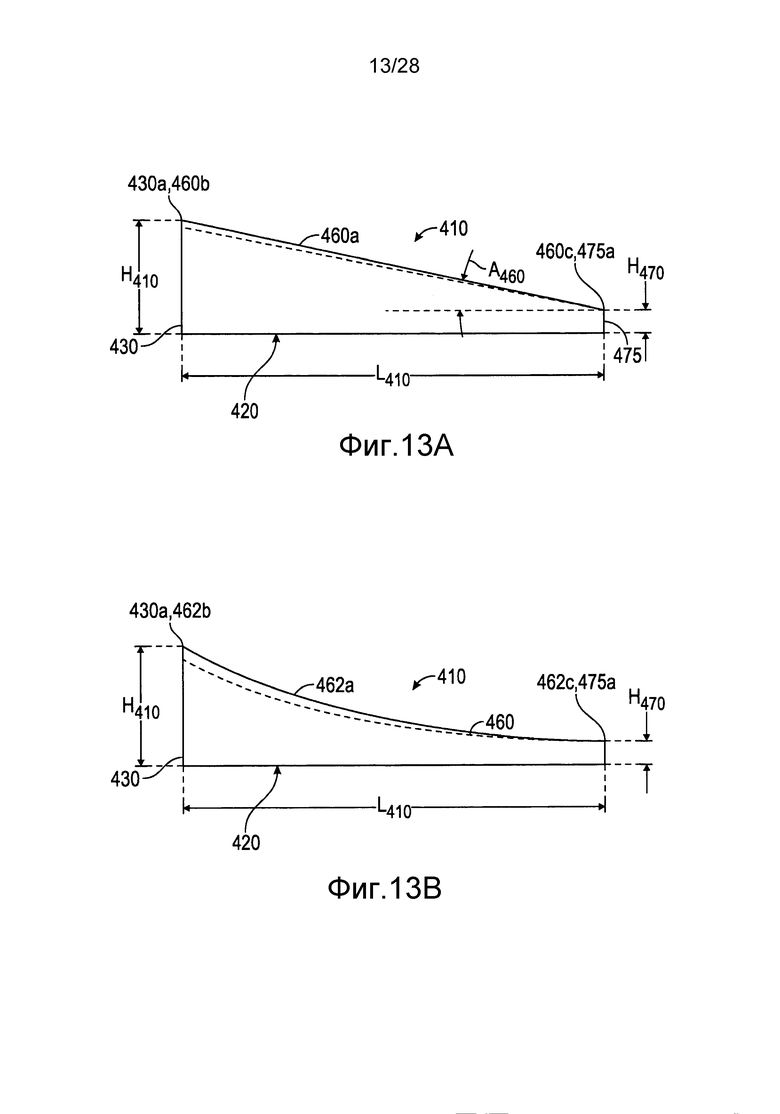
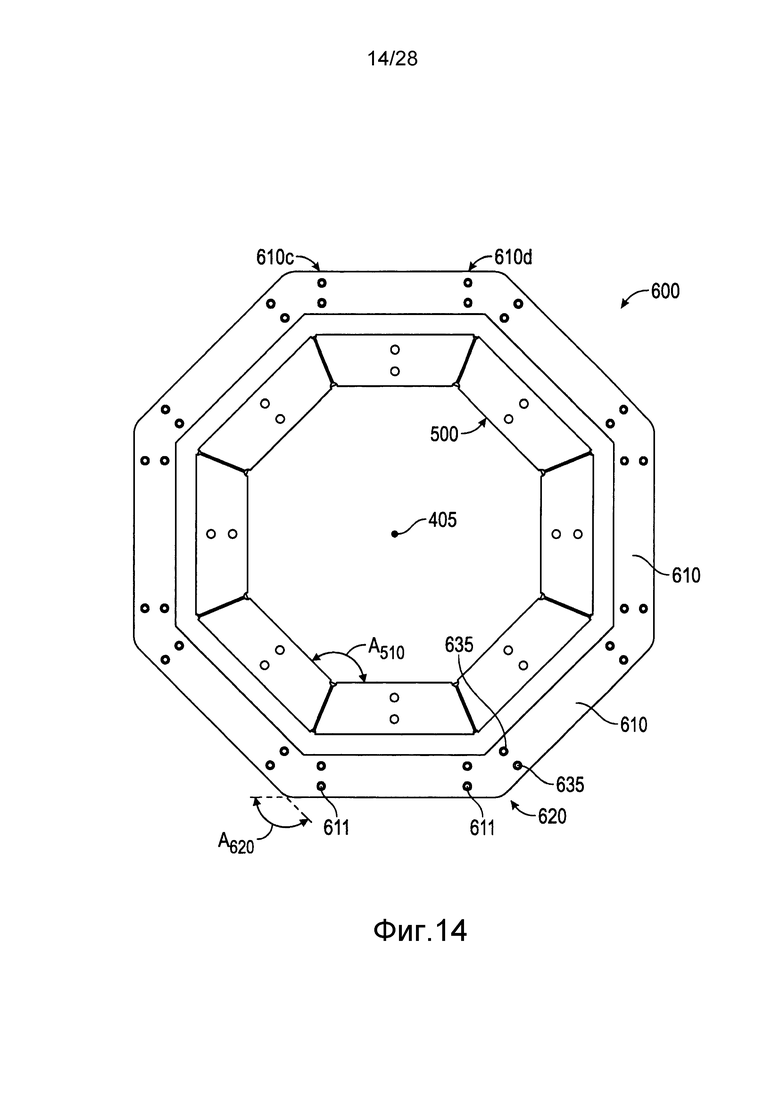
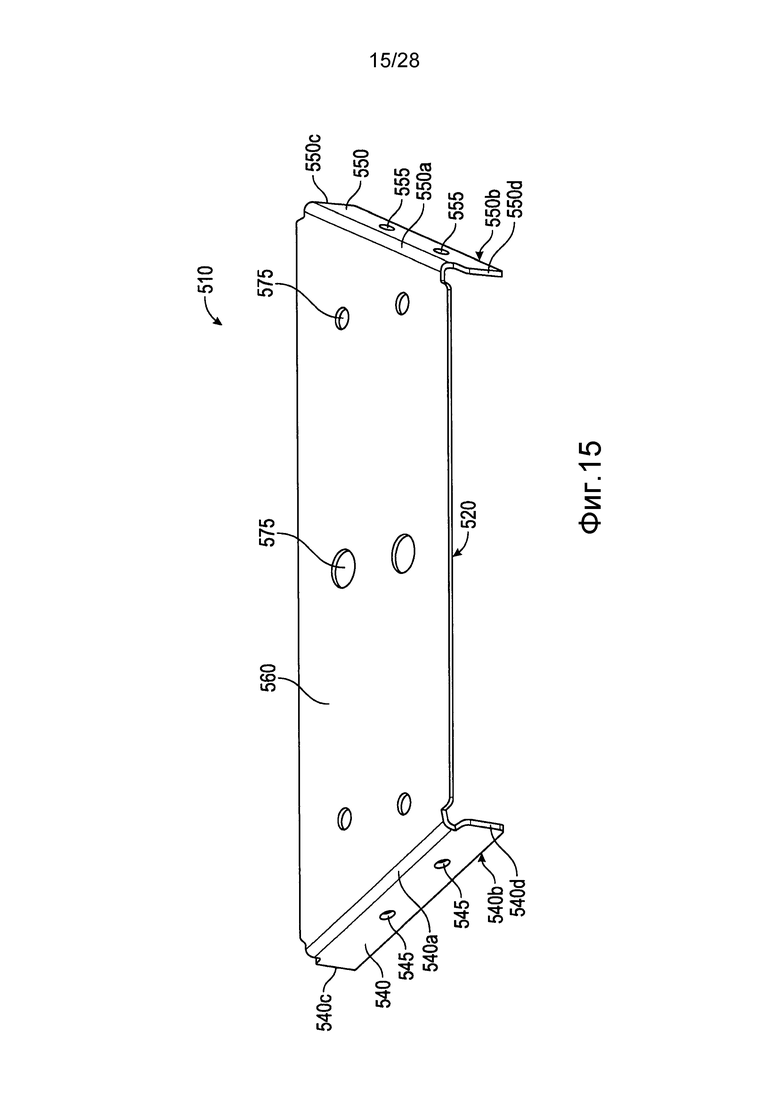
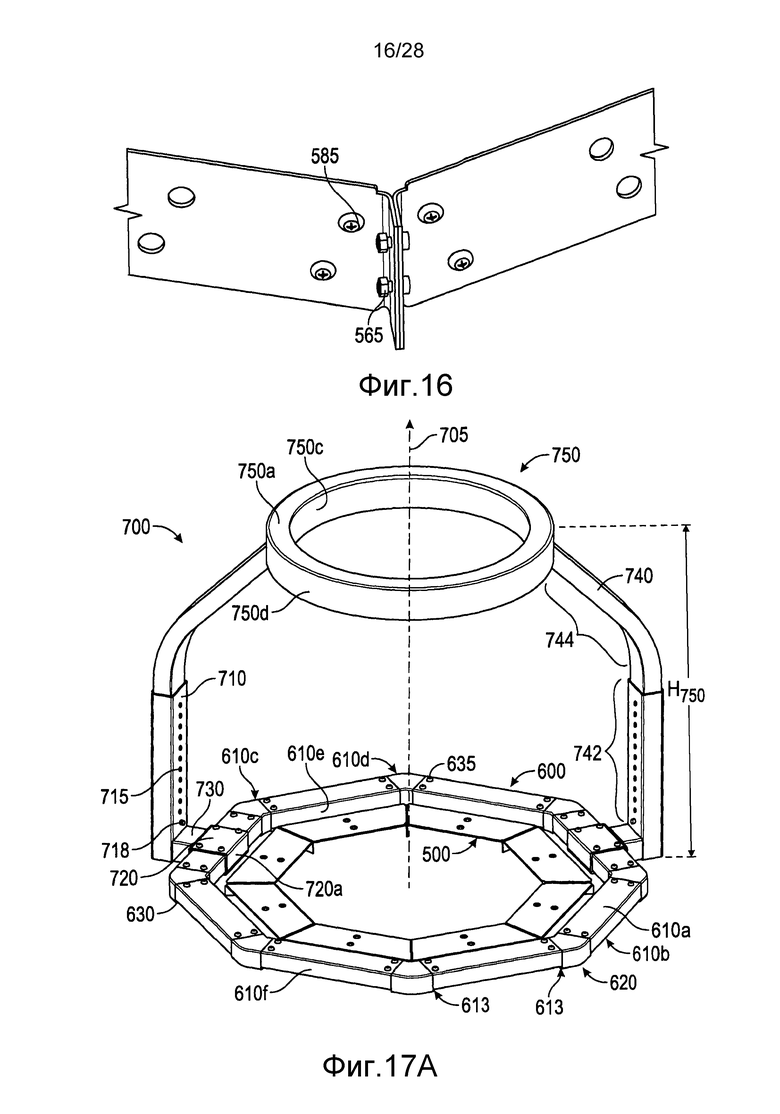
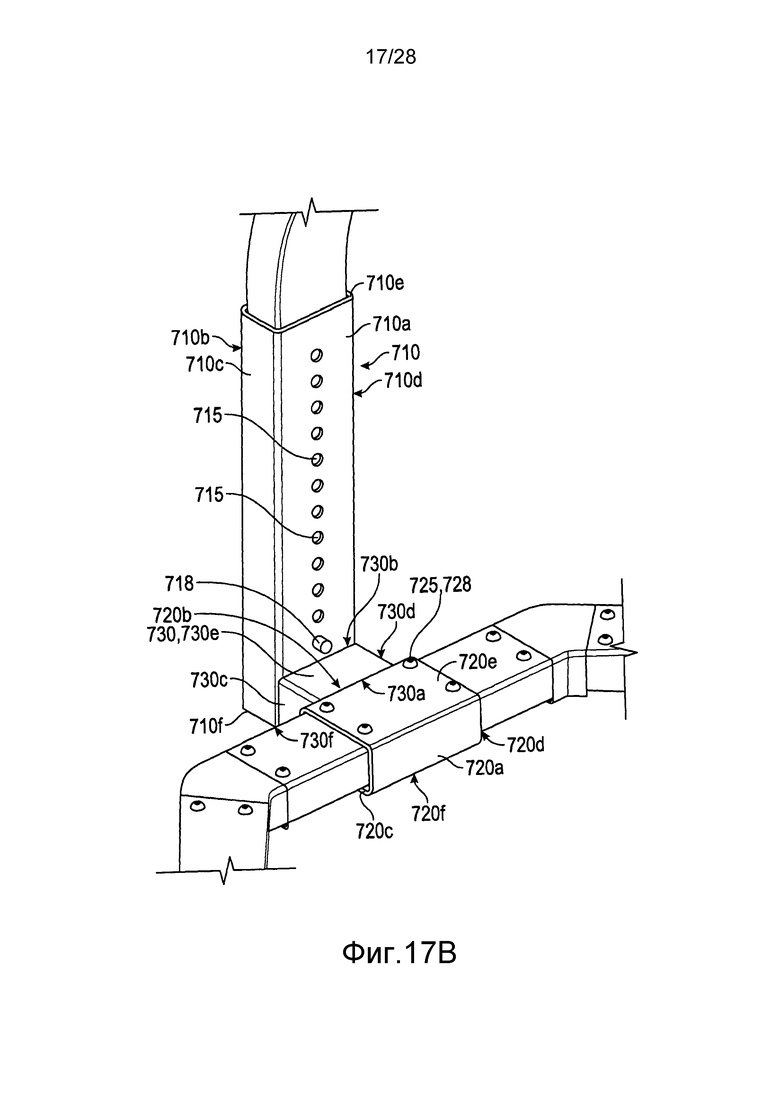
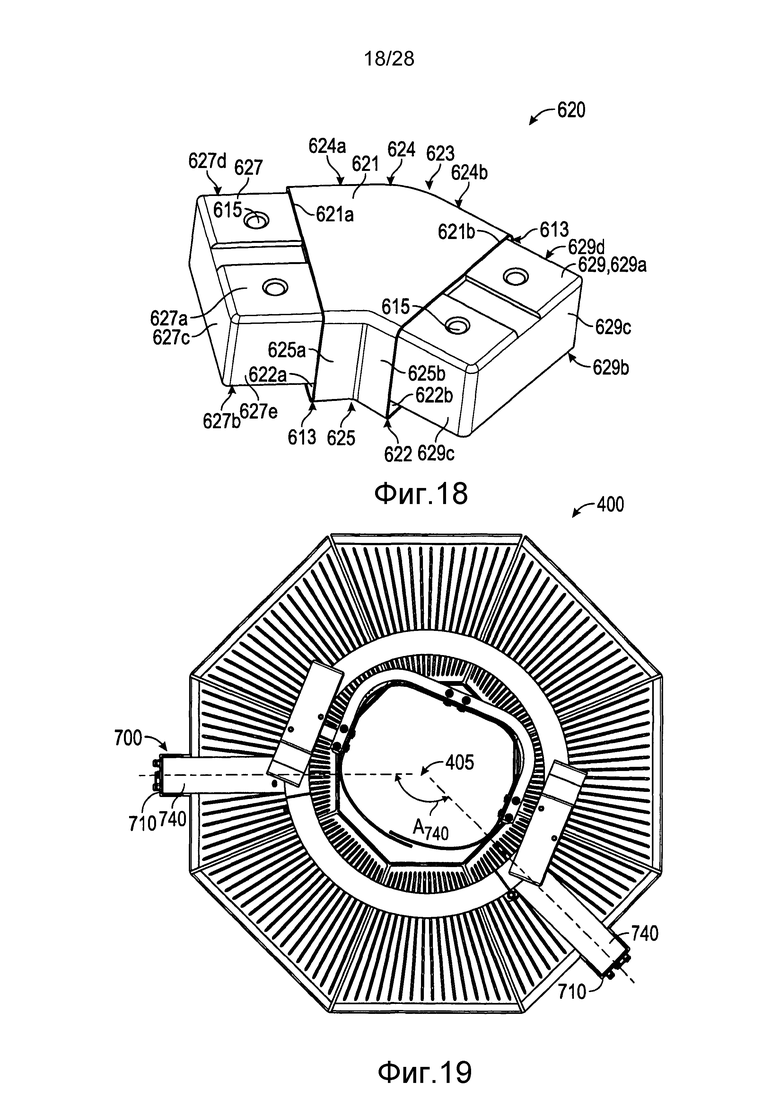
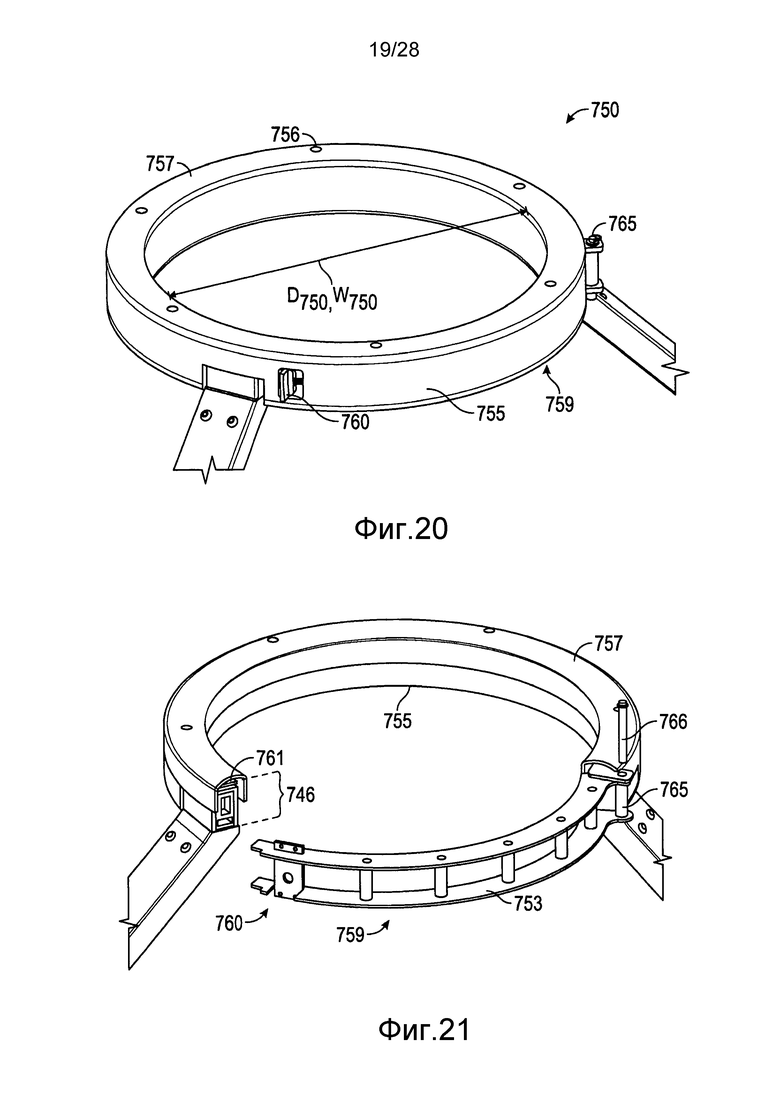
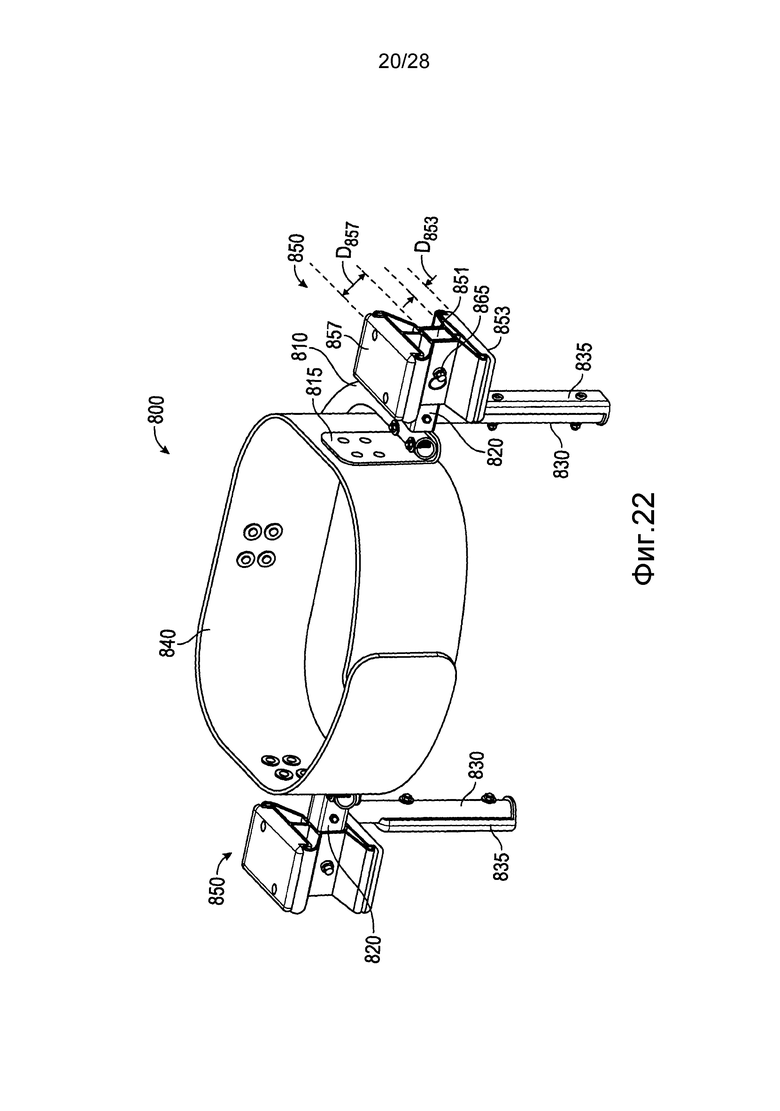
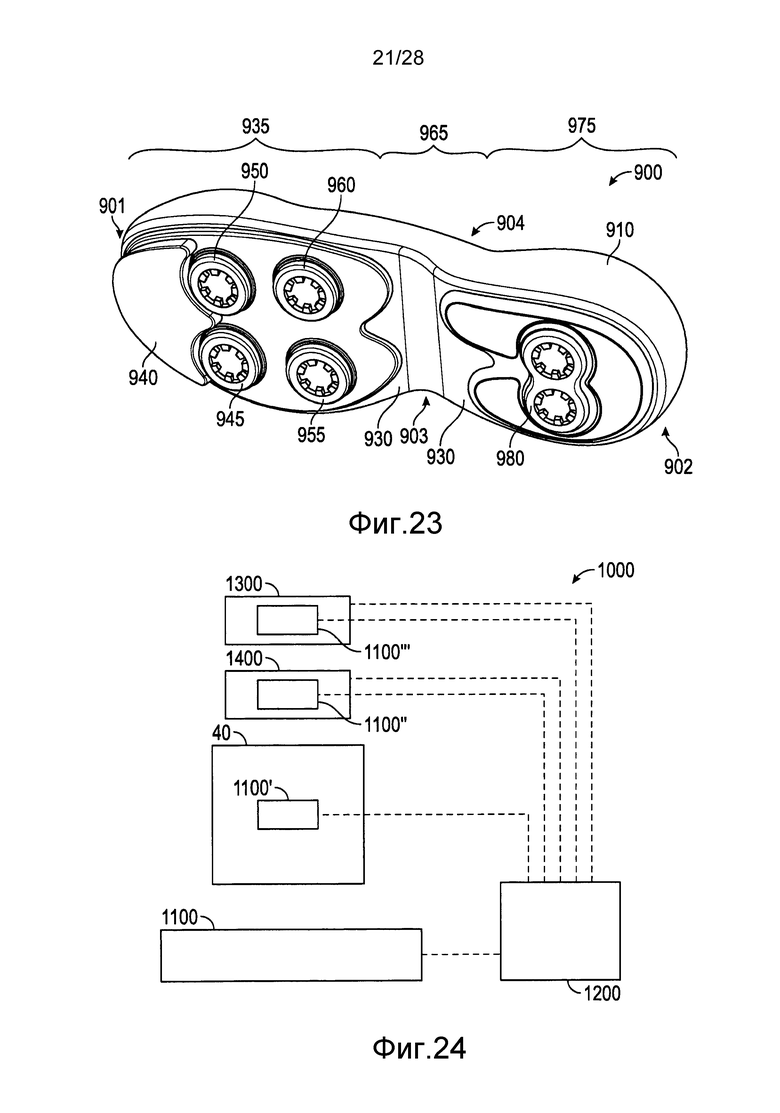
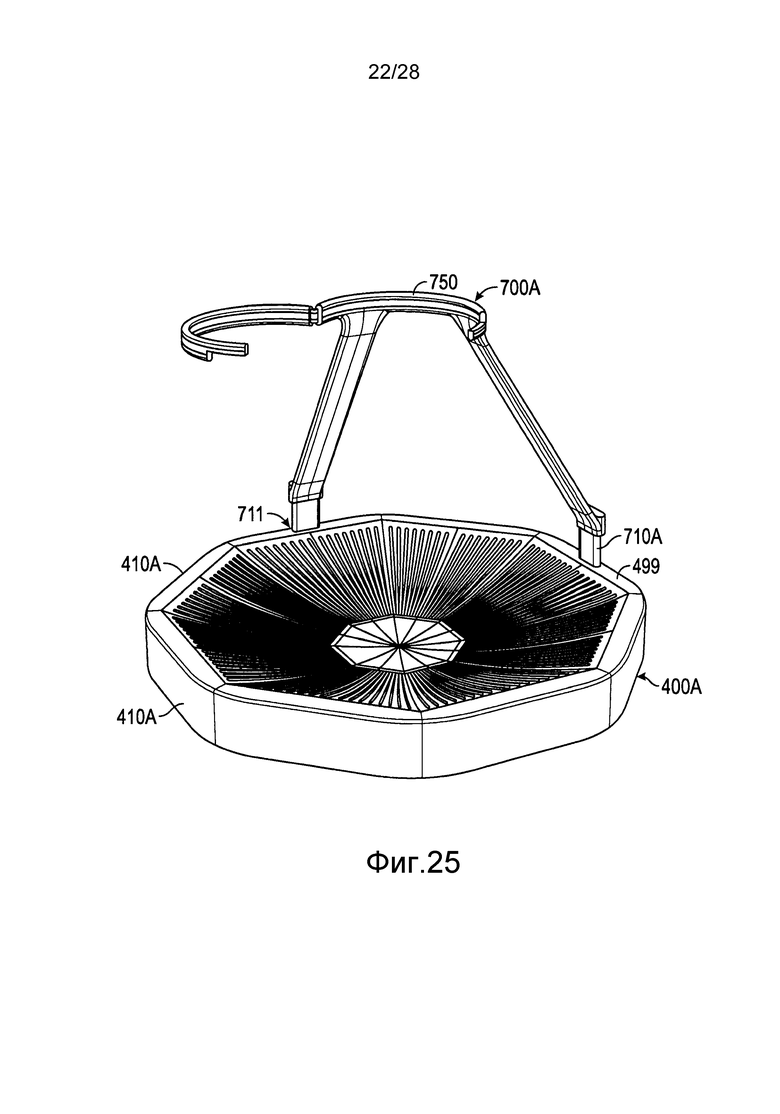
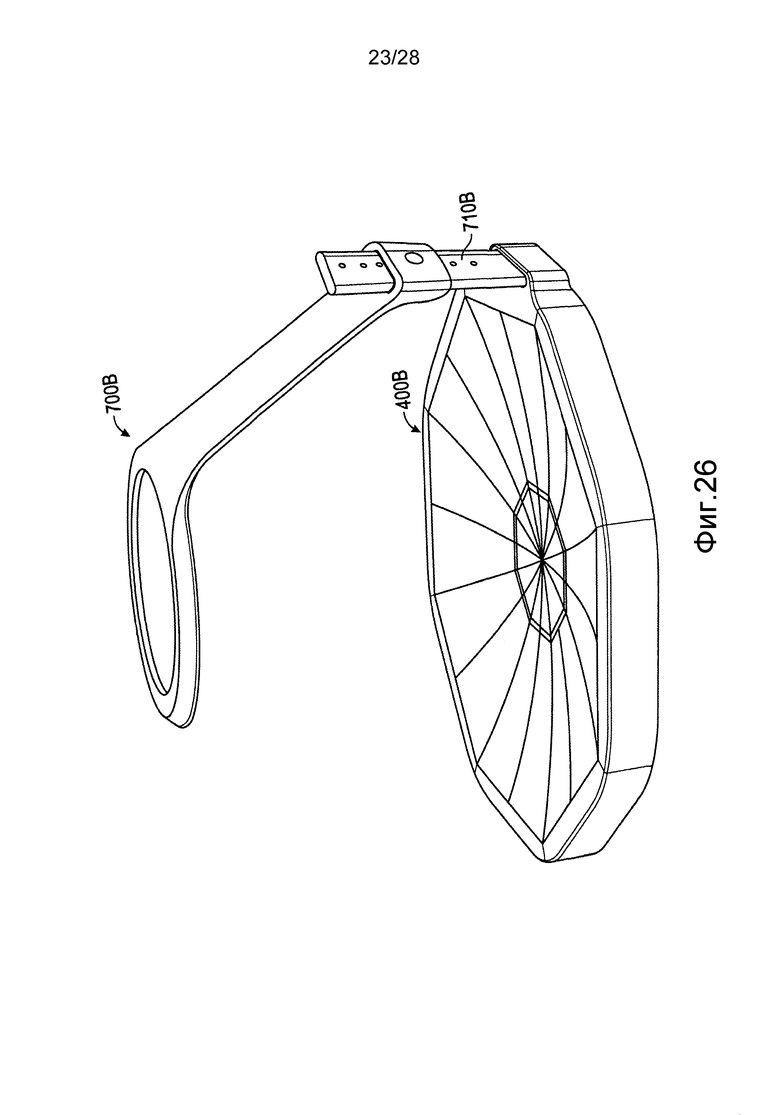
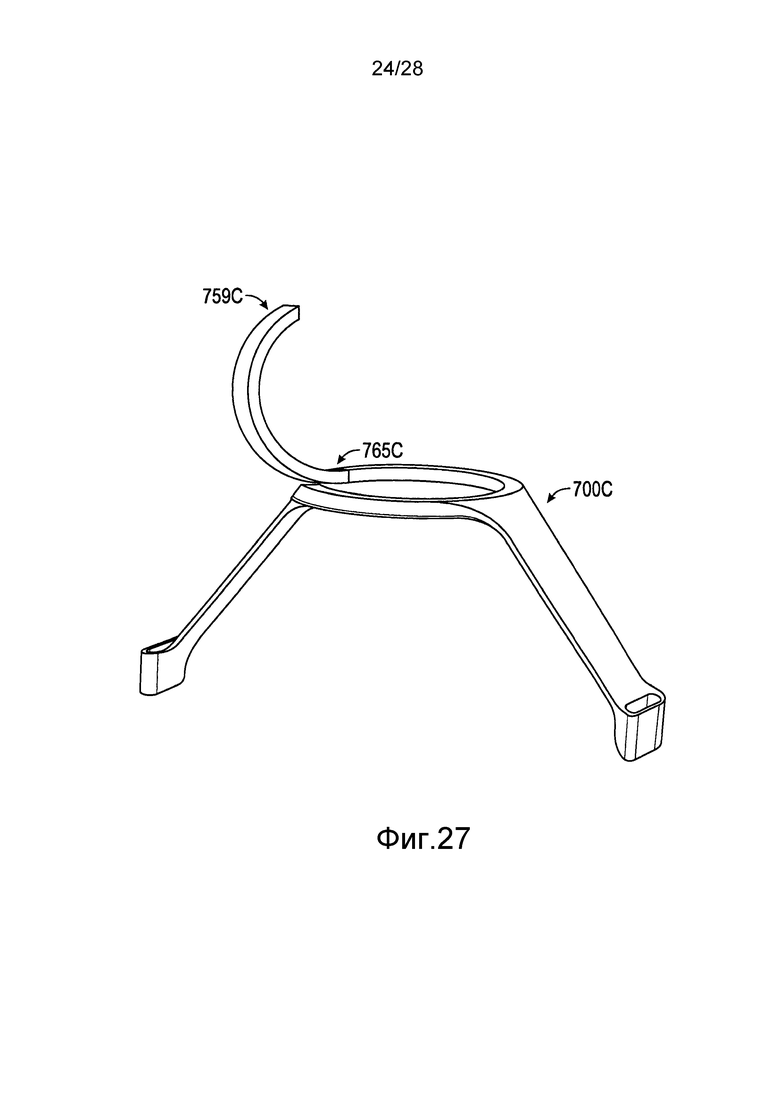
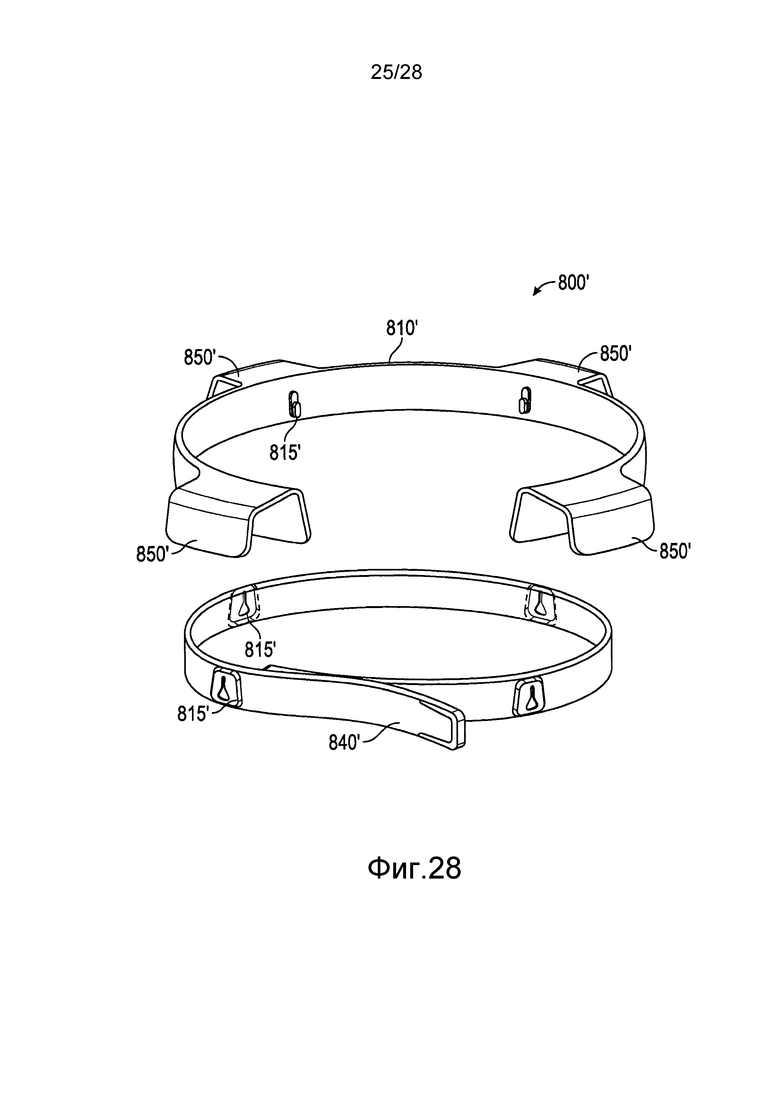
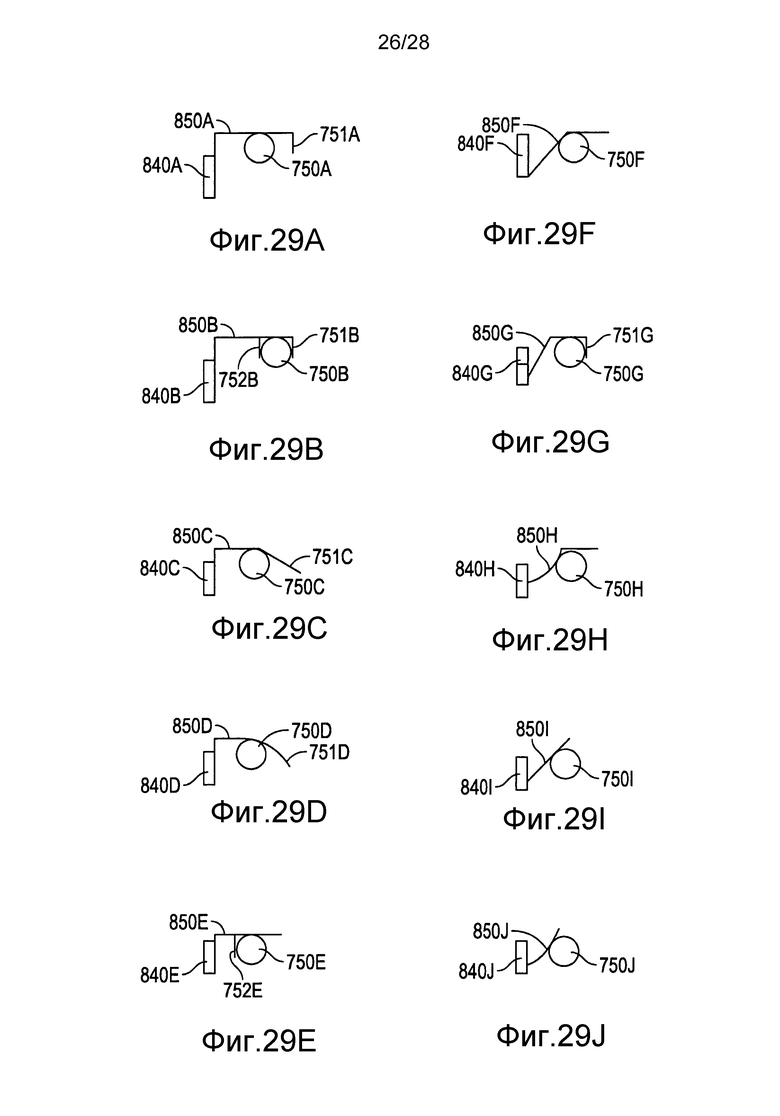
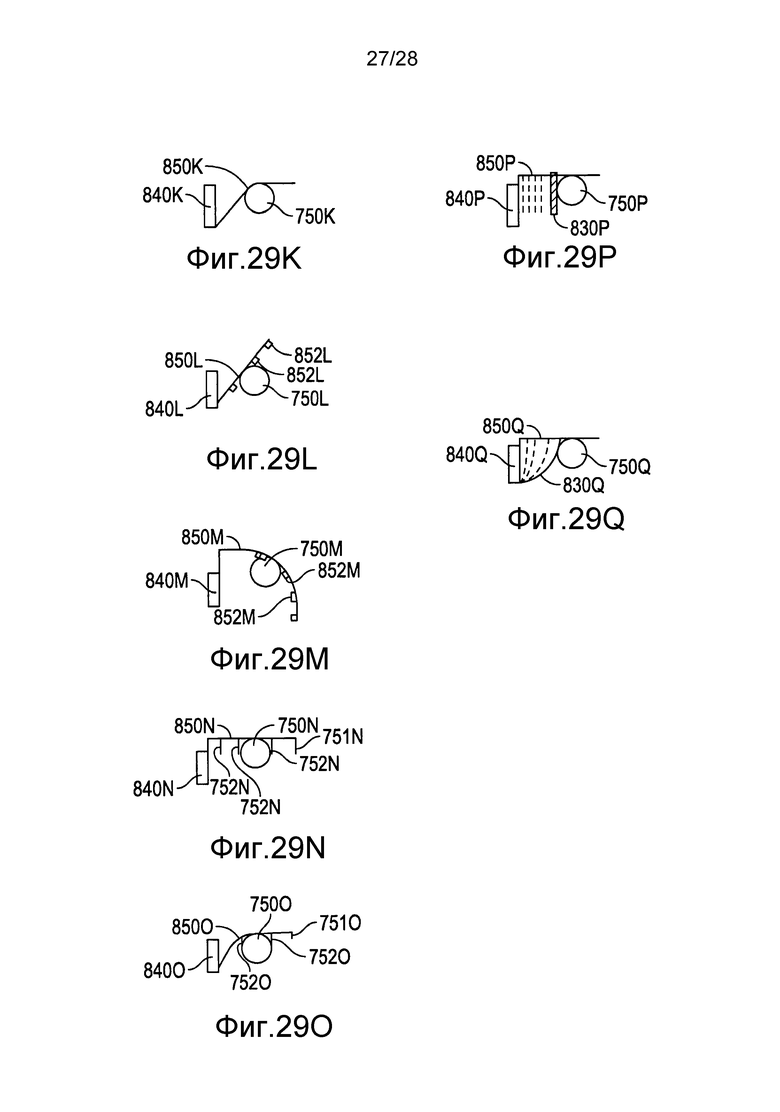
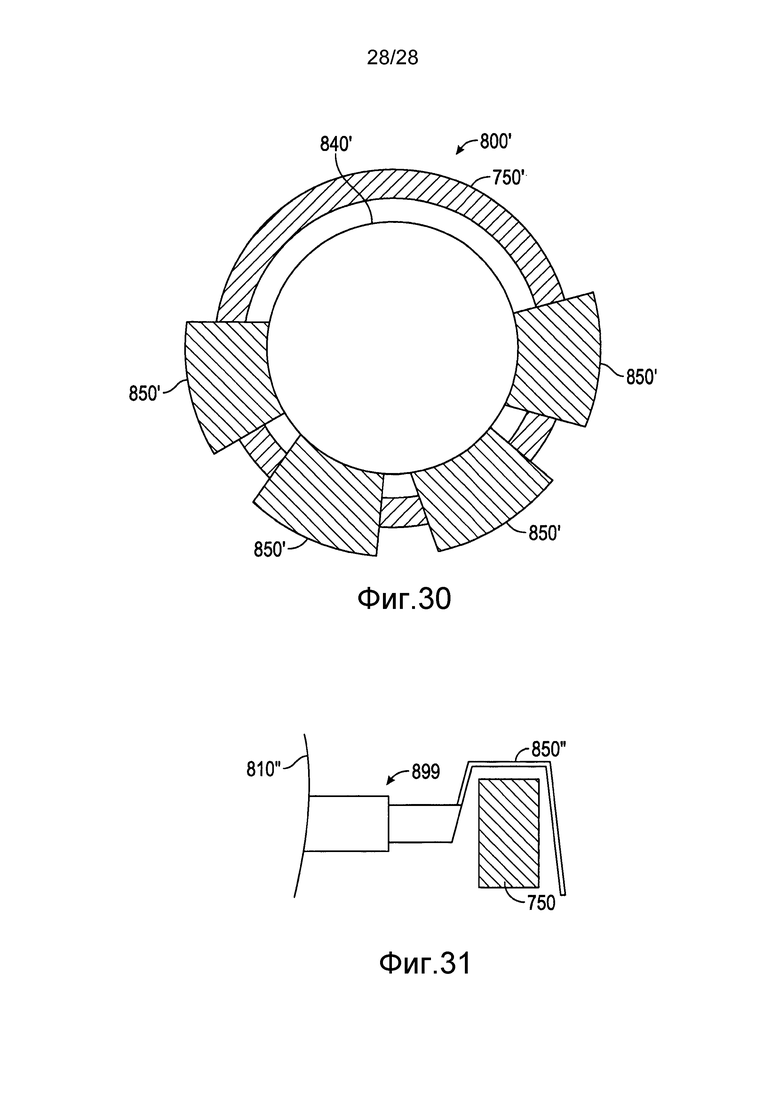
Изобретение относится к системам виртуальной реальности. Технический результат заключается в обеспечении локомоционного устройства, предоставляющего возможность пользователям безопасно осуществлять доступ к виртуальным окружениям. Локомоционная система включает в себя платформу, сконфигурированную, чтобы поддерживать пользователя, узел поддержки со страховочным поясом, соединенный с платформой и протягивающийся вверх от платформы, и страховочный пояс, сконфигурированный, чтобы надеваться на пользователя. Узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси. Страховочный пояс включает в себя структуру сопряжения, подвижно соединенную с гало-опорой. 3 н. и 28 з.п. ф-лы, 56 ил.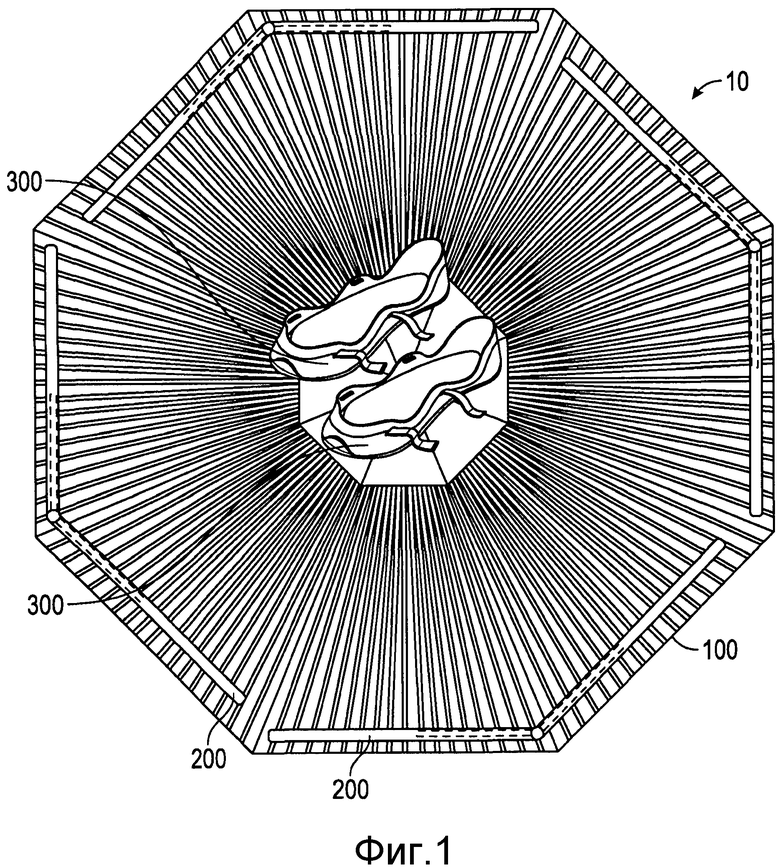
1. Локомоционная система для использования с технологией виртуального окружения, причем система содержит:
платформу, сконфигурированную, чтобы поддерживать пользователя;
узел поддержки со страховочным поясом, соединенный с платформой и протягивающийся вверх от платформы, при этом узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси; и
страховочный пояс, сконфигурированный, чтобы одеваться на пользователя, при этом страховочный пояс включает в себя структуру сопряжения с низким коэффициентом трения, сконфигурированную для зацепления с возможностью скольжения с гало-опорой;
при этом структура сопряжения отделена по вертикали от гало-опоры и сконфигурирована, чтобы двигаться по окружности относительно гало-опоры, в то же время вертикально поддерживаясь гало-опорой.
2. Система по п. 1, при этом структура сопряжения сконфигурирована, чтобы двигаться радиально относительно гало-опоры, в то же время вертикально поддерживаясь гало-опорой.
3. Система по п. 1, при этом гало-опора расположена на регулируемой высоте Н над платформой.
4. Система по п. 1, при этом гало-опора расположена на высоте Н над платформой и при этом высота Н находится между 30,0 и 50,0 дюймами.
5. Система по п. 1, при этом гало-опора является кольцеобразной.
6. Система по п. 1, при этом гало-опора сконфигурирована, чтобы протягиваться полностью вокруг пользователя.
7. Система по п. 1, при этом гало-опора включает в себя дверцу для доступа, сконфигурированную, чтобы предоставлять возможность пользователю проходить внутрь гало-опоры.
8. Система по п. 1, при этом платформа имеет верхнюю поверхность, содержащую множество соседних канавок.
9. Система по п. 1, дополнительно содержащая оболочки для ступней, сконфигурированные, чтобы скользящим образом зацеплять платформу.
10. Система по п. 8, при этом каждая оболочка для ступни включает в себя первую накладку с переменным коэффициентом трения, имеющую низкий коэффициент трения, и вторую накладку с переменным коэффициентом трения, имеющую коэффициент трения, более высокий в сравнении с первой накладкой с переменным коэффициентом трения.
11. Система по п. 1, при этом платформа включает в себя множество расположенных рядом по окружности секций, соединенных вместе.
12. Система по п. 1, при этом узел поддержки со страховочным поясом включает в себя пару расположенных с интервалом по окружности соединительных балок, соединенных с гало-опорой.
13. Система по п. 1, при этом страховочный пояс включает в себя множество расположенных с интервалом по окружности структур сопряжения, при этом каждая структура сопряжения подвижно соединена с гало-опорой.
14. Локомоционная система для использования с технологией виртуального окружения, причем система содержит:
платформу, сконфигурированную, чтобы поддерживать пользователя;
узел поддержки со страховочным поясом, соединенный с платформой и протягивающийся вверх от платформы, при этом узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси; и
страховочный пояс, включающий в себя ремень, сконфигурированный, чтобы надеваться пользователем, структуру сопряжения, соединенную с ремнем, и вертикальный элемент, соединенный с ремнем, при этом структура сопряжения зацепляет с возможностью скольжения верхнюю поверхность гало-опоры и при этом вертикальный элемент расположен внутри гало-опоры и сконфигурирован, чтобы ограничивать радиальное перемещение структуры сопряжения относительно гало-опоры.
15. Система по п. 14, при этом гало-опора является кольцеобразной.
16. Система по п. 14, при этом гало-опора сконфигурирована, чтобы протягиваться полностью вокруг пользователя.
17. Система по п. 14, при этом верхняя поверхность содержит множество расположенных рядом по окружности секций, соединенных вместе.
18. Система по п. 14, при этом гало-опора расположена на регулируемой высоте Н над платформой.
19. Система по п. 18, при этом гало-опора расположена на высоте Н над платформой и при этом высота Н находится между 30,0 и 50,0 дюймами.
20. Система виртуальной реальности, содержащая:
локомоционную систему, включающую в себя платформу, сконфигурированную, чтобы поддерживать пользователя;
по меньшей мере одну оболочку для ступни для надевания пользователем, чтобы зацеплять платформу;
узел поддержки со страховочным поясом, соединенный с платформой; и
страховочный пояс, сконфигурированный, чтобы одеваться на пользователя;
при этом оболочки для ступни включают в себя первую накладку с переменным коэффициентом трения, имеющую низкий коэффициент трения, и вторую накладку с переменным коэффициентом трения, имеющую коэффициент трения, более высокий в сравнении с первой накладкой с переменным коэффициентом трения;
при этом узел поддержки со страховочным поясом включает в себя гало-опору, расположенную над платформой и протягивающуюся вокруг вертикальной центральной оси, и при этом страховочный пояс сконфигурирован, чтобы двигаться относительно гало-опоры;
блок обработки;
устройство обнаружения движения, осуществляющее связь с блоком обработки и сконфигурированное, чтобы обнаруживать и отслеживать движение пользователя; и
устройство отображения, осуществляющее связь с блоком обработки и выполненное с возможностью приема сигналов от блока обработки, представляющих движения пользователя в виртуальном окружении.
21. Система по п. 20, при этом страховочный пояс сконфигурирован, чтобы двигаться вертикально относительно гало-опоры.
22. Система по п. 20, при этом страховочный пояс сконфигурирован, чтобы двигаться по окружности относительно гало-опоры.
23. Система по п. 22, при этом страховочный пояс сконфигурирован, чтобы двигаться радиально относительно гало-опоры.
24. Система по п. 20, при этом страховочный пояс сконфигурирован, чтобы двигаться по окружности и радиально относительно гало-опоры, в то же время вертикально поддерживаясь гало-опорой.
25. Система по п. 20, дополнительно содержащая множество устройств обнаружения движения, каждое сконфигурировано, чтобы обнаруживать и отслеживать движение пользователя.
26. Система по п. 25, при этом множество устройств обнаружения движения расположено по меньшей мере в одном из платформы, контроллера, сконфигурированного, чтобы удерживаться пользователем, и устройства отображения.
27. Система по п. 20, при этом блок обработки расположен в платформе.
28. Система по п. 25, при этом одно или более устройств обнаружения движения выбраны из группы, содержащей инерционный датчик движения, акселерометр, магнитометр, инфракрасное или оптическое отслеживающее устройство, емкостной датчик, отслеживающее устройство системы глобального позиционирования и магнитное отслеживающее устройство.
29. Система по п. 20, дополнительно содержащая контроллер, сконфигурированный, чтобы удерживаться пользователем.
30. Система по п. 29, при этом устройство обнаружения движения соединено с контроллером.
31. Система по п. 20, при этом устройство обнаружения движения является первым инерционным датчиком движения, соединенным с первым из числа по меньшей мере одной оболочки для ступни, и вторым инерционным датчиком движения, соединенным со второй из числа по меньшей мере одной оболочки для ступни.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И СОРЕВНОВАНИЙ, ПРЕИМУЩЕСТВЕННО В СПОРТИВНЫХ ЛОКОМОЦИЯХ И ИГРАХ | 1999 |
|
RU2149667C1 |

