Область техники
Изобретение относится к доске, прикрепляемой к ногам пловца или аквалангиста и содержащей питающийся от аккумулятора движитель.
Уровень техники
Известны подводная дыхательная трубка или движители с ручным приводом для аквалангиста. Например, аккумуляторные устройства Sea Doo® RS с использованием литий-ионных легких аккумуляторов. Для удержания устройства перед аквалангистом используют рулевой орган управления. Устройство имеет нейтральную плавучесть. Сжимая два курковых устройства одной рукой, подается питание на устройство, и освобождая курковые устройства, прекращаются подача питания в движитель. Помимо необходимого ручного управления, такие устройства, как правило, имеют минимальную тягу. Как указано в этом документе, ранее применяемые ручные тянущие устройства будет упоминаться как ручные движители или, в общем, как «морской скутер».
Задачей изобретения является разработка системы для адаптации известных ручных движителей для крепления на спине, груди или ногах пользователя.
Помимо указанной адаптерной системы, необходимо разработать автономное устройство, отличное от любого известного ручного движителя, выполненное с возможностью крепления на ступнях и активации ступнями пользователя и по существу обеспечения тяги для перемещения под водой.
Раскрытие изобретения
Первым объектом изобретения является комплект, прикрепляемый к ручному движителю и способный устанавливаться на груди, спине или ступнях пользователя.
Другим объектом изобретения является новое устройство, специально разработанное для крепления на ступнях. Согласно одному из вариантов осуществления устройство может иметь форму подводной подножной доски со встроенным аккумулятором и двигателем с одним или несколькими движительными агрегатами. Согласно другому варианту осуществления изобретения закрепленный на ступнях движительный агрегат снабжен шарнирным ножным креплением для управления кабельным или электронным переключателем, регулирующим скорость двигателя.
Другие особенности изобретения будут понятны из последующего описания и приложенной формулы изобретения со ссылками на чертежи, на которых одинаковыми ссылочными позициями обозначены соответствующие части на нескольких видах.
Краткое описание чертежей
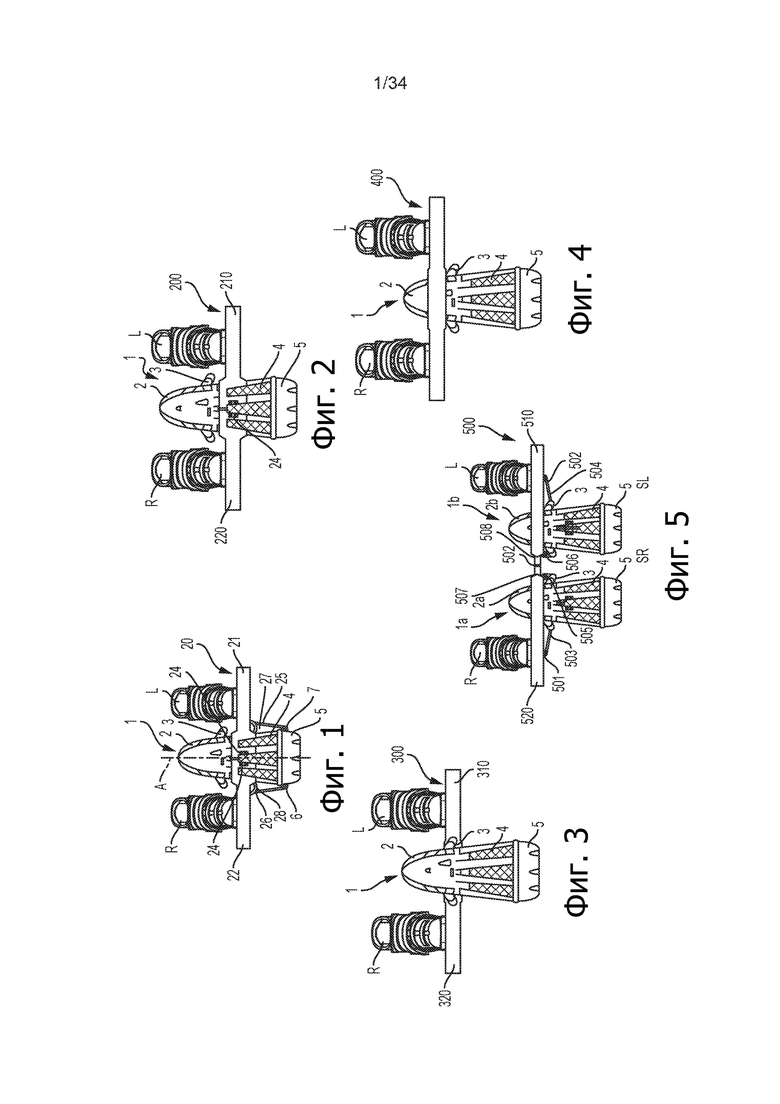
На фиг. 1 показан ремень на подножной доске и заднее крепление доски, вид спереди;
на фиг. 2 - зажим на подножной доске и заднее крепление подножной доски, вид спереди;
на фиг. 3 - ручка крепления подножной доски, вид спереди;
на фиг. 4 - верхнее крепление подножной доски, вид спереди;
на фиг. 5 - сдвоенный морской скутер с шарнирной подножной доской, вид спереди;
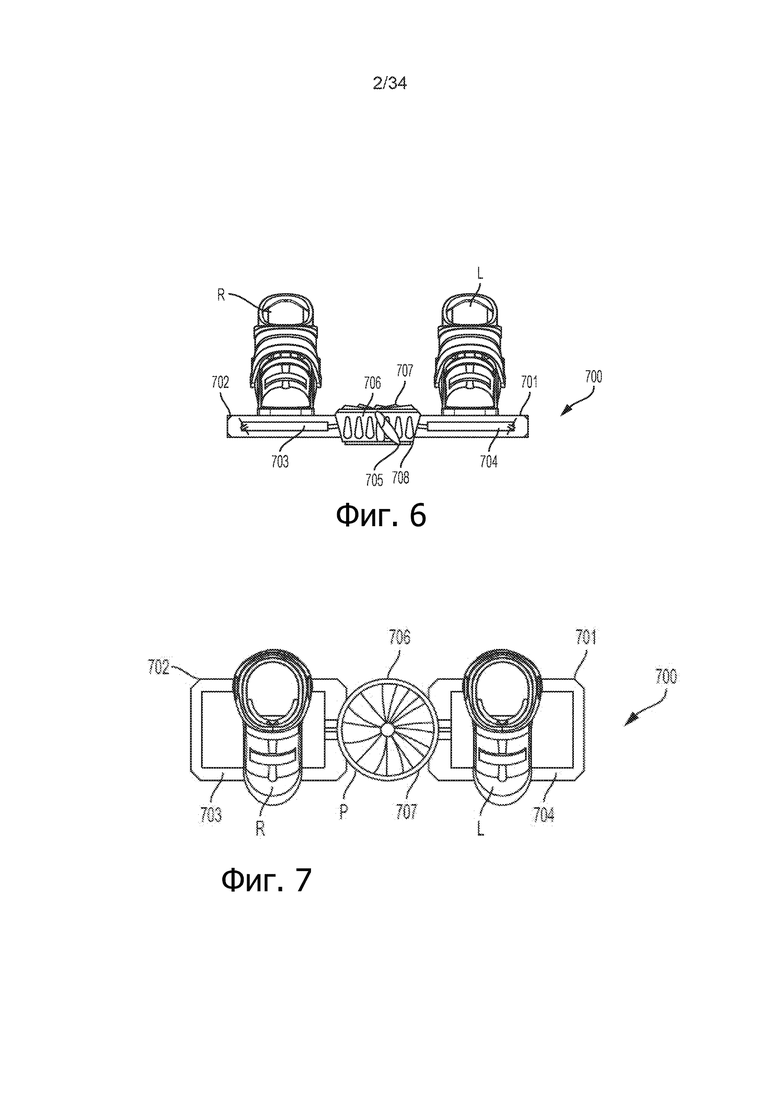
на фиг. 6 - подножная доска со встроенным аккумулятором, вид спереди в поперечном разрезе;
на фиг. 7 - вариант выполнения подножной доски по фиг. 6, вид сверху;
на фиг. 8 - подножная доска со встроенным аккумулятором и сдвоенным двигателем, вид спереди в поперечном разрезе;
на фиг. 9 - вариант выполнения подножной доски по фиг. 8, вид сверху.
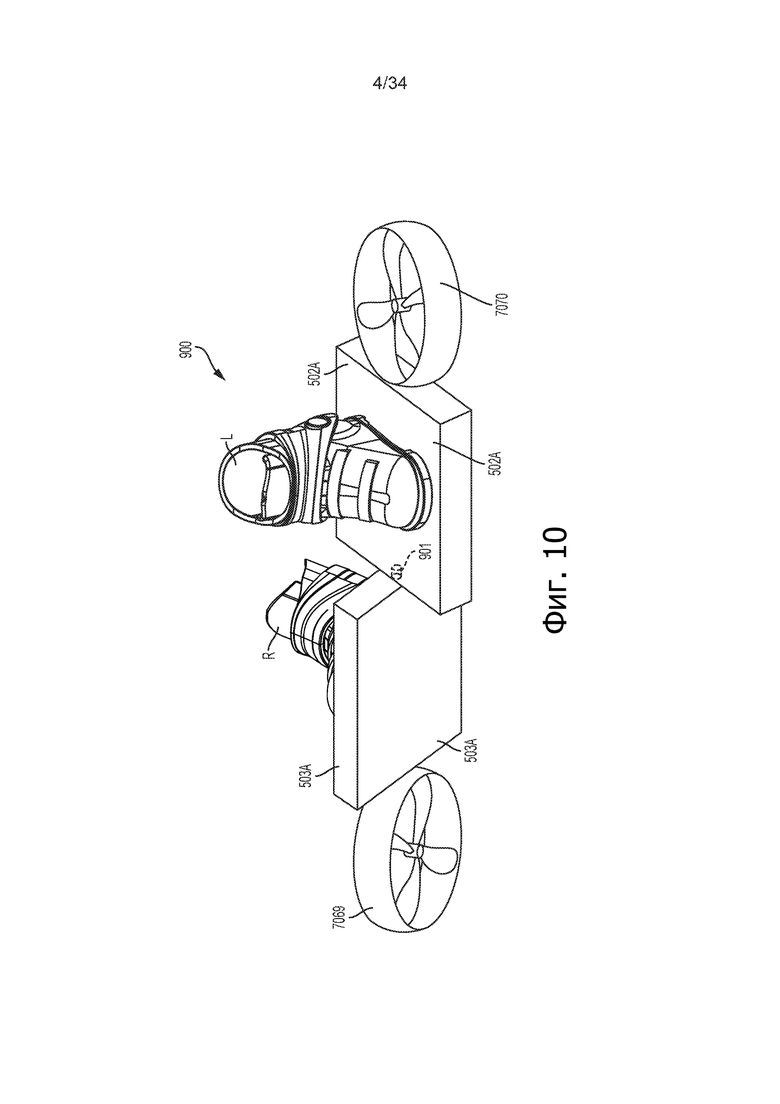
на фиг. 10 - вариант выполнения устройства, вид спереди в перспективе;
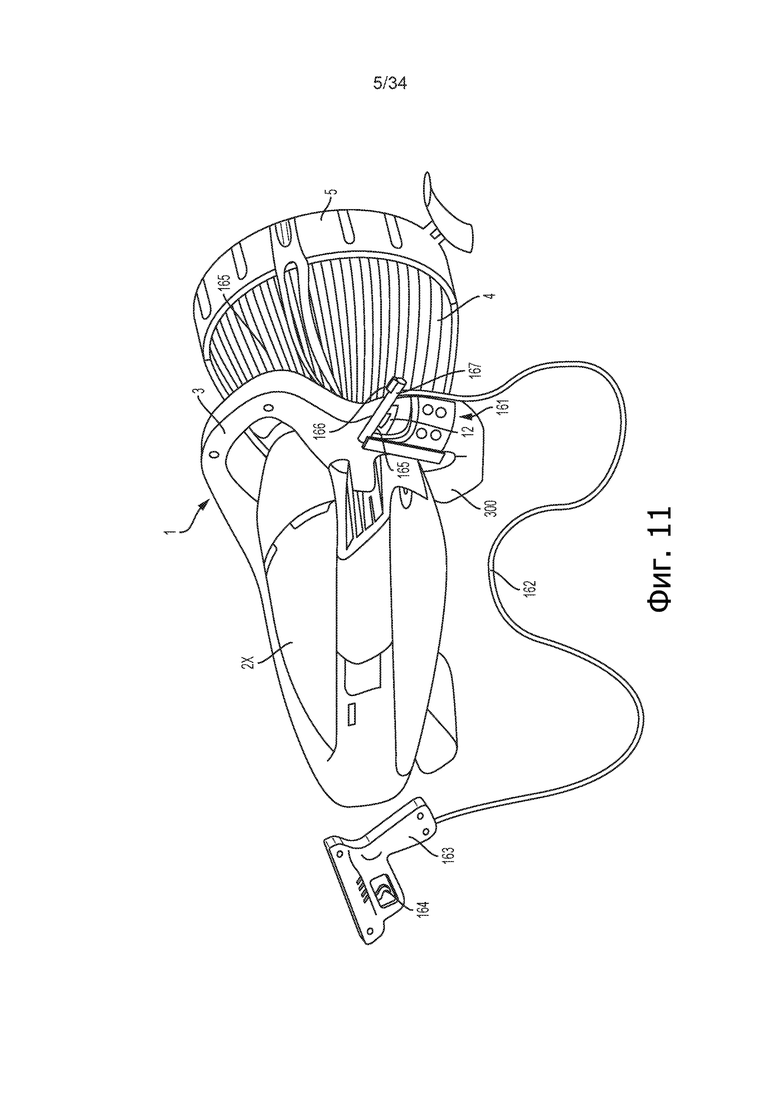
на фиг. 11 - морской скутер, снабженный рычагом для кнопки регулятора, приводимым в действие кабелем, вид сбоку в перспективе;
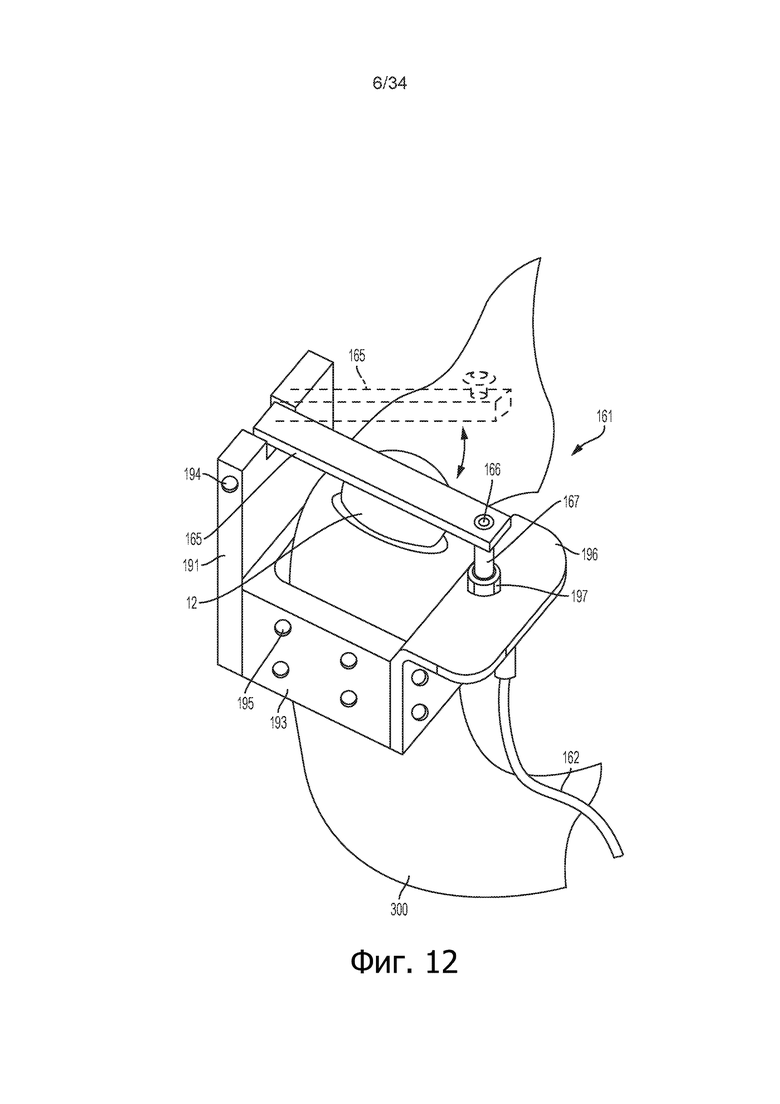
на фиг. 12 - рычажный узел для кнопки регулировки, установленный на рукоятке морского скутера, вид в перспективе;
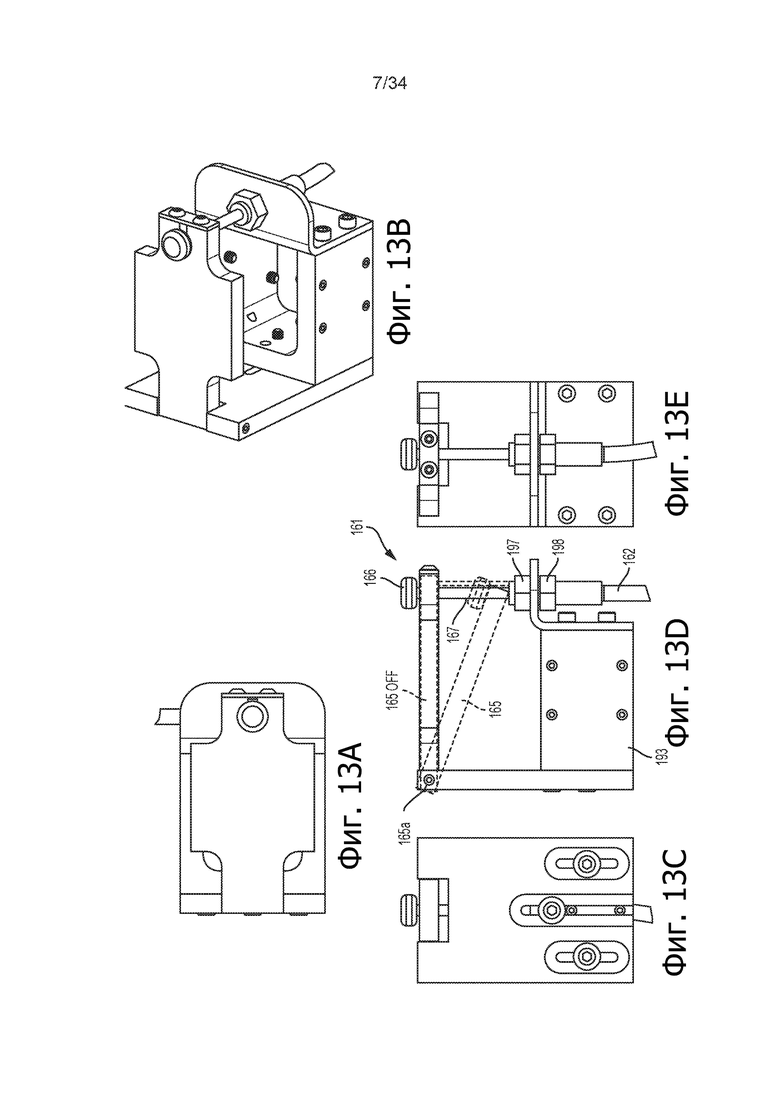
на фиг. 13A - рычажный узел для кнопки регулятора;
на фиг. 13B - рычажный узел для кнопки регулятора, вид в перспективе;
на фиг. 13C - рычажный узел для кнопки регулятора, вид сбоку;
на фиг. 13D - рычажный узел для кнопки регулятора, вид сбоку в поперечном разрезе;
на фиг. 13Е - рычажный узел для кнопки регулятора, вид сверху;
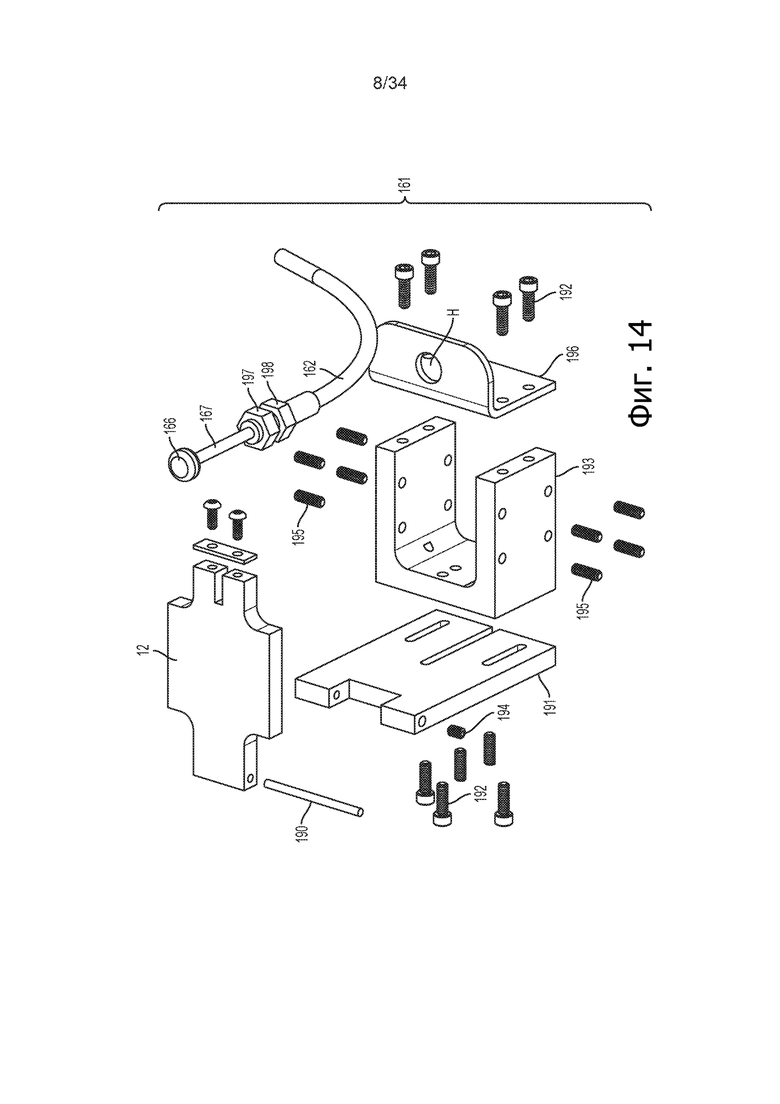
на фиг. 14 - рычажный узел для кнопки регулятора, вид с разделением на части;
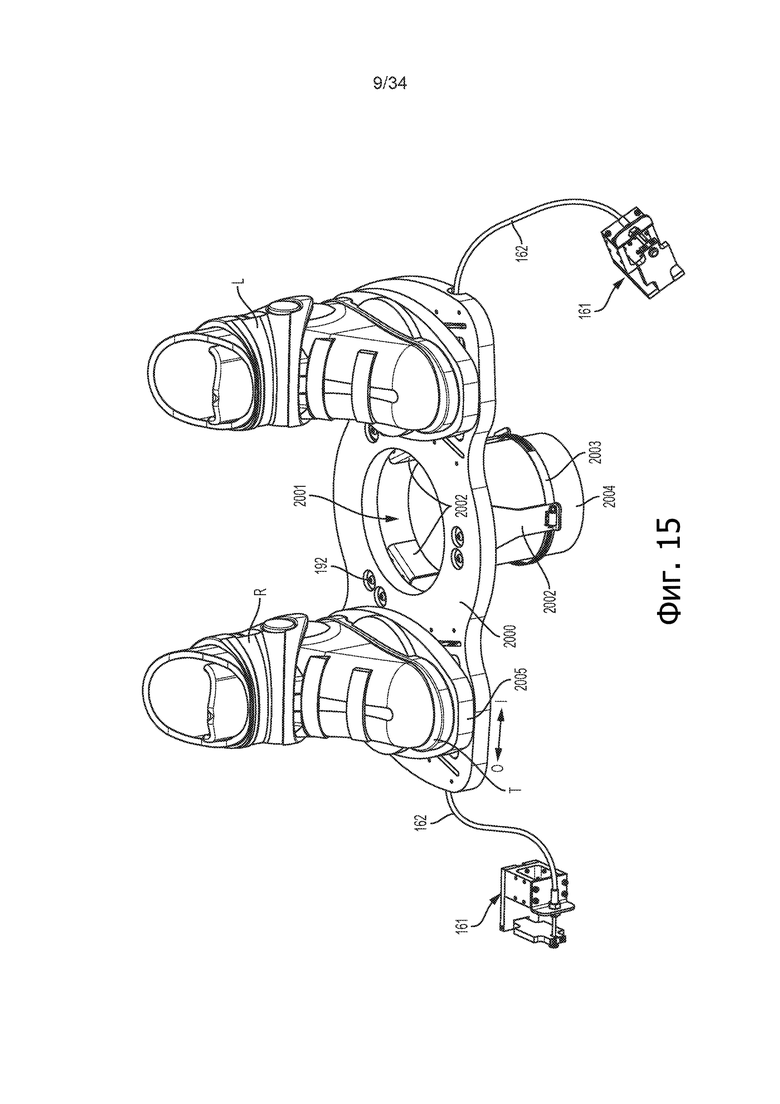
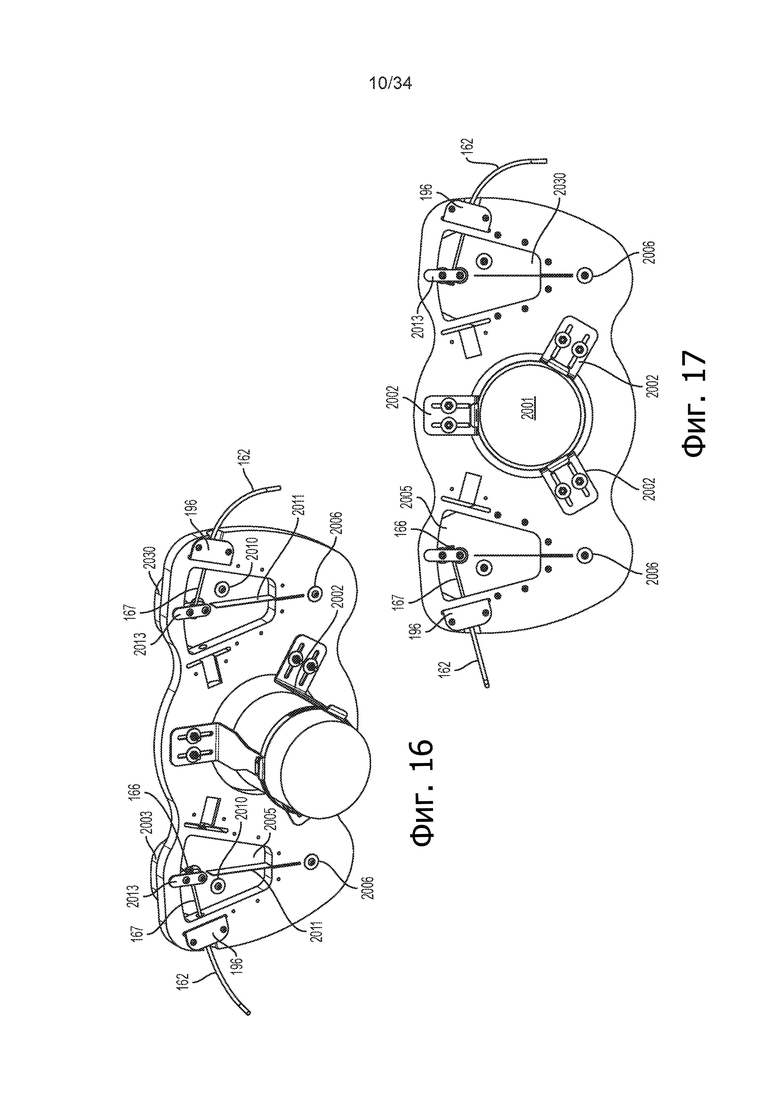
на фиг. 15 - подножная доска, управляемая ступнями, вид спереди в перспективе;
на фиг. 16 - подножная доска, управляемая ступнями, вид снизу в перспективе;
на фиг. 17 - подножная доска, управляемая ступнями, вид снизу;
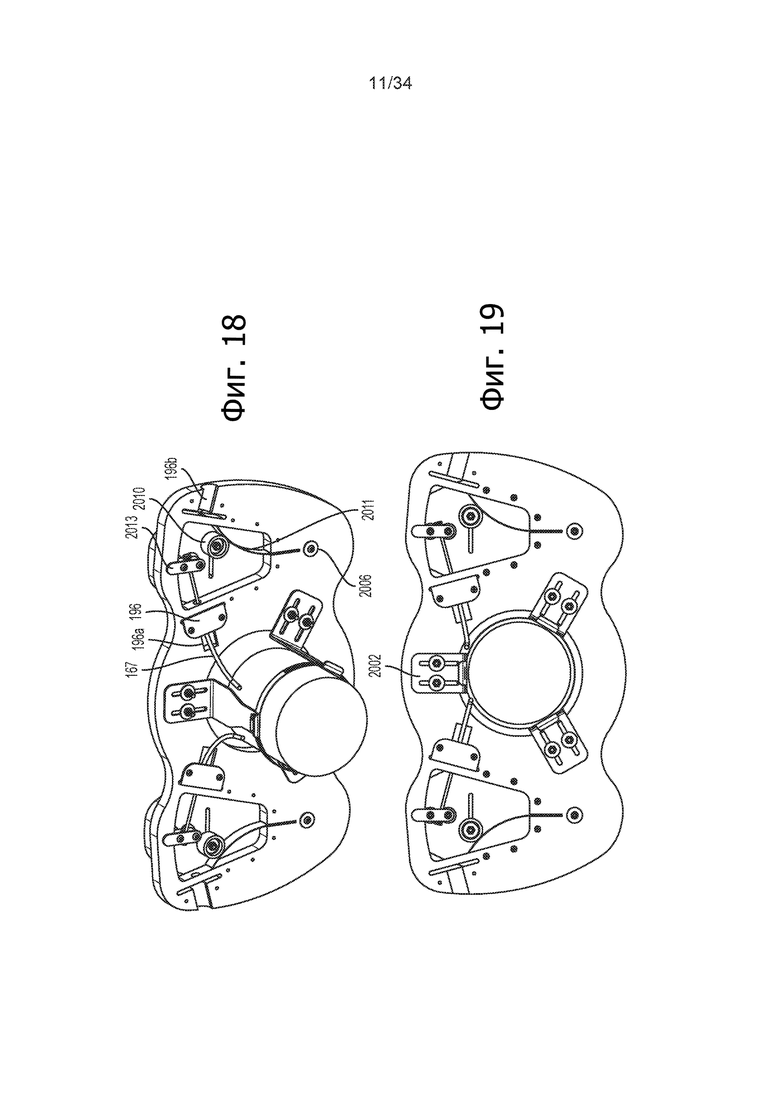
на фиг. 18 - вариант выполнения устройства, вид снизу в перспективе;
на фиг. 19 - вариант выполнения устройства, вид снизу в плане;
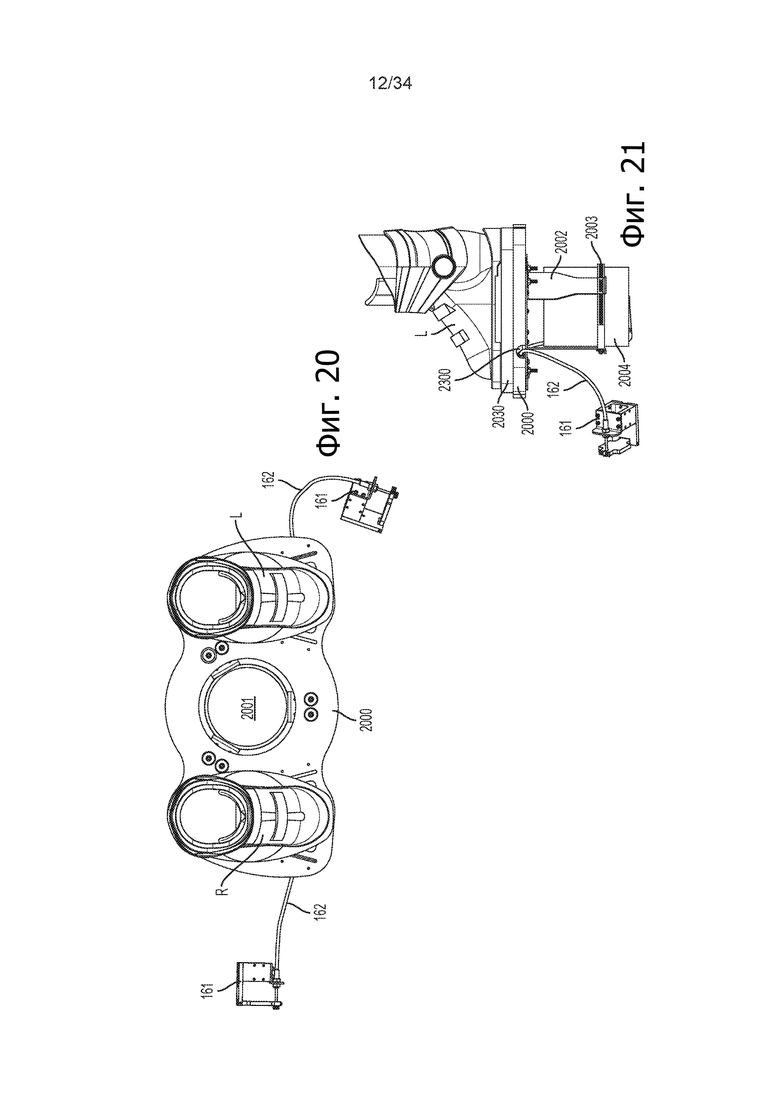
на фиг. 20 - вариант выполнения устройства, вид сверху в плане;
на фиг. 21 - вариант выполнения устройства, вид сбоку;
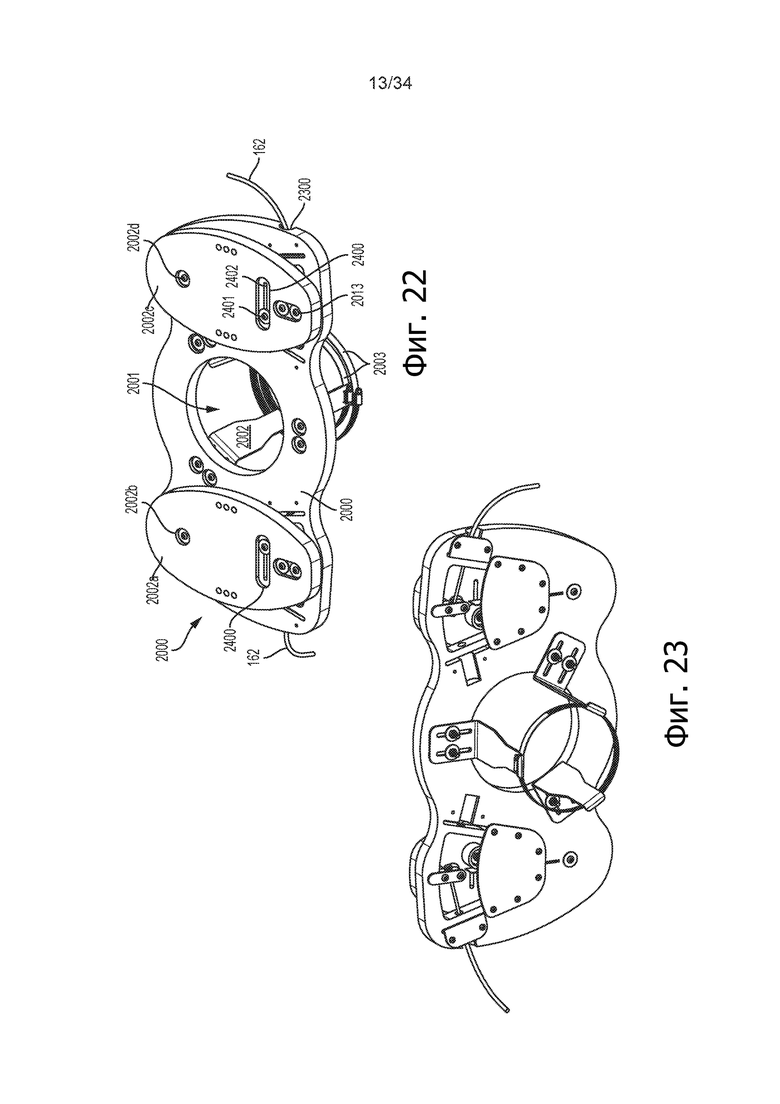
на фиг. 22 - вариант выполнения устройства, вид сверху в перспективе;
на фиг. 23 - вариант выполнения устройства, вид снизу в перспективе;
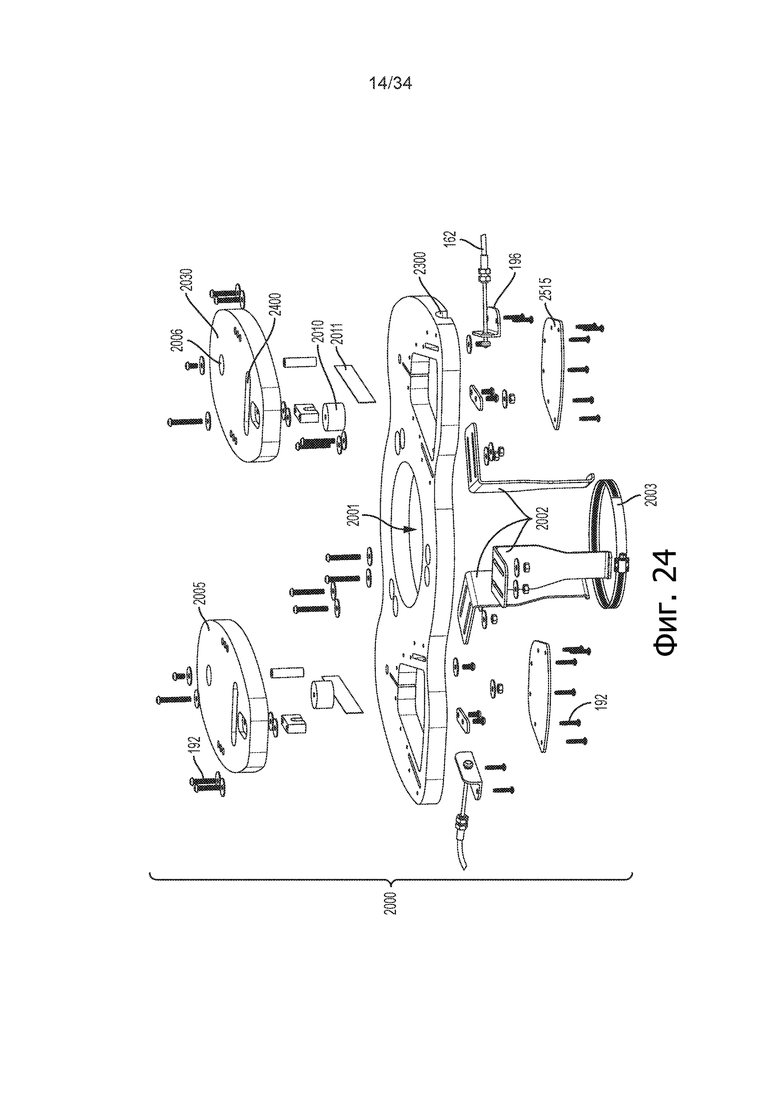
на фиг. 24 - вариант выполнения устройства, вид с разделением на части;
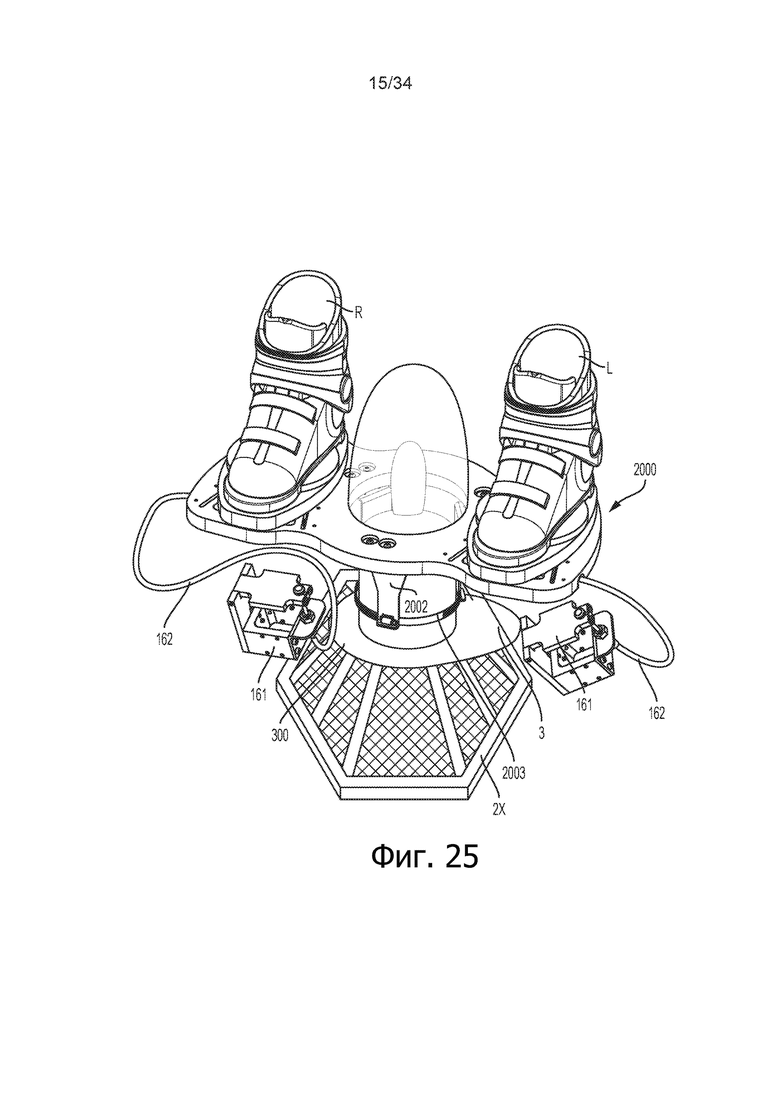
на фиг. 25 - вариант выполнения устройства, установленного на морском скутере, вид спереди в перспективе;
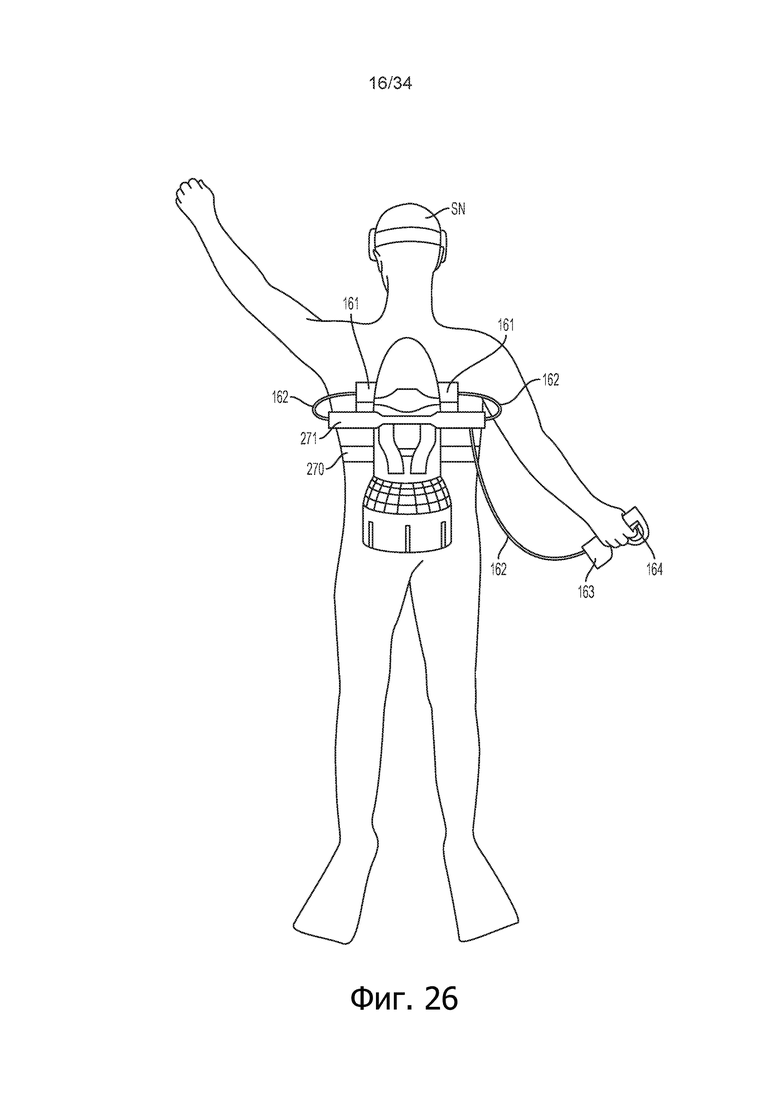
на фиг. 26 - морской скутер, установленный на спине, вид сверху;
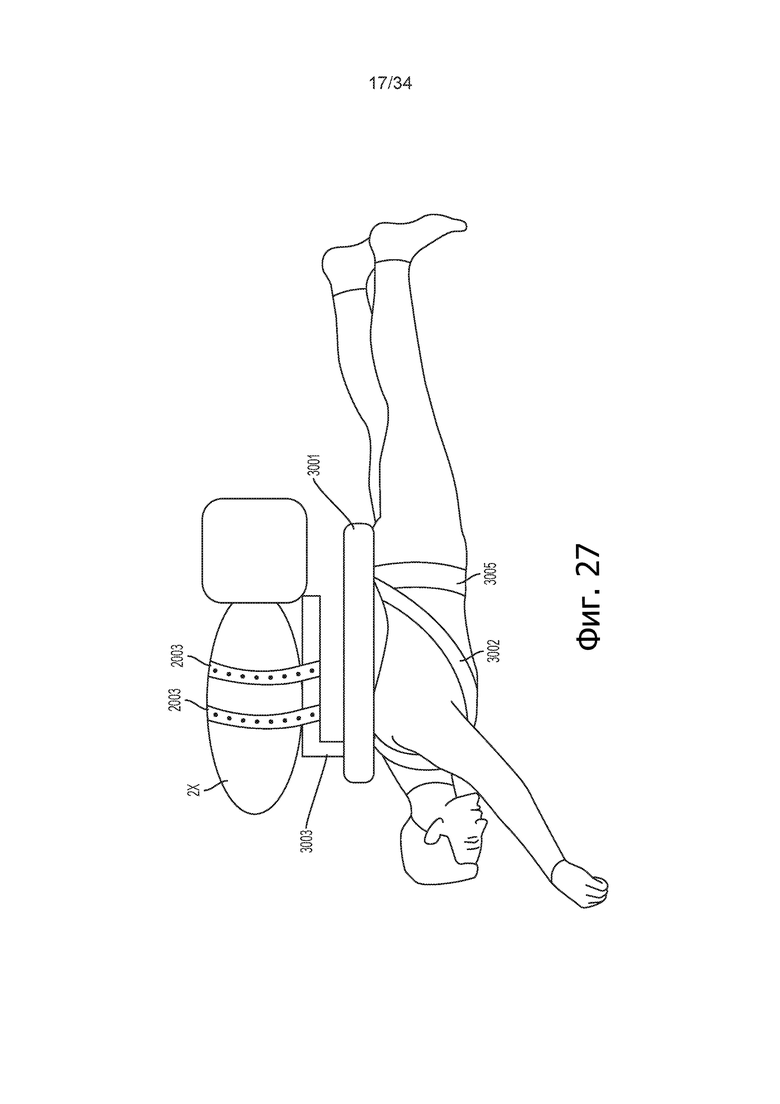
на фиг. 27 - вариант выполнения держателя L на спине, вид сбоку в перспективе;
на фиг. 28 - вариант выполнения держателя L на груди, вид сбоку в вертикальной проекции;
на фиг. 29 - сдвоенный держатель L подножной доски, вид спереди;
на фиг. 30 - сдвоенный держатель L подножной доски, вид спереди;
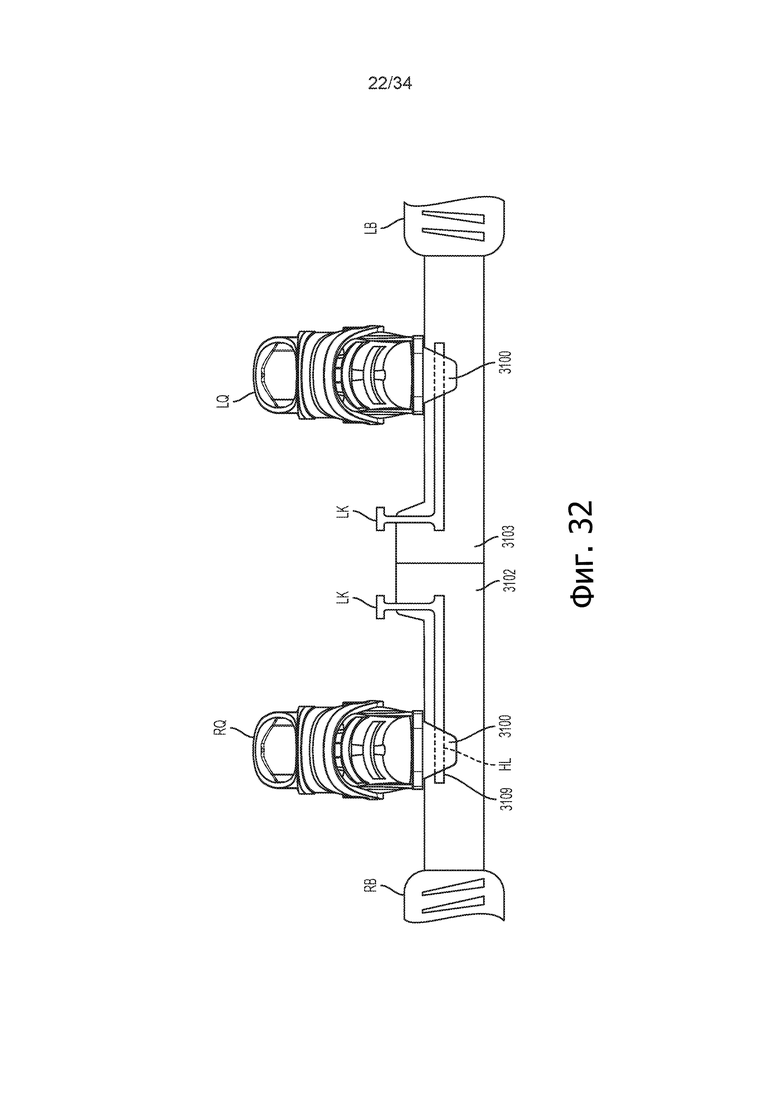
на фиг. 31 - вариант выполнения быстроразъемного соединения ботинка, вид спереди в вертикальной проекции;
на фиг. 32 - вариант выполнения быстроразъемного соединения ботинка, зафиксированного на месте, вид спереди в поперечном разрезе;
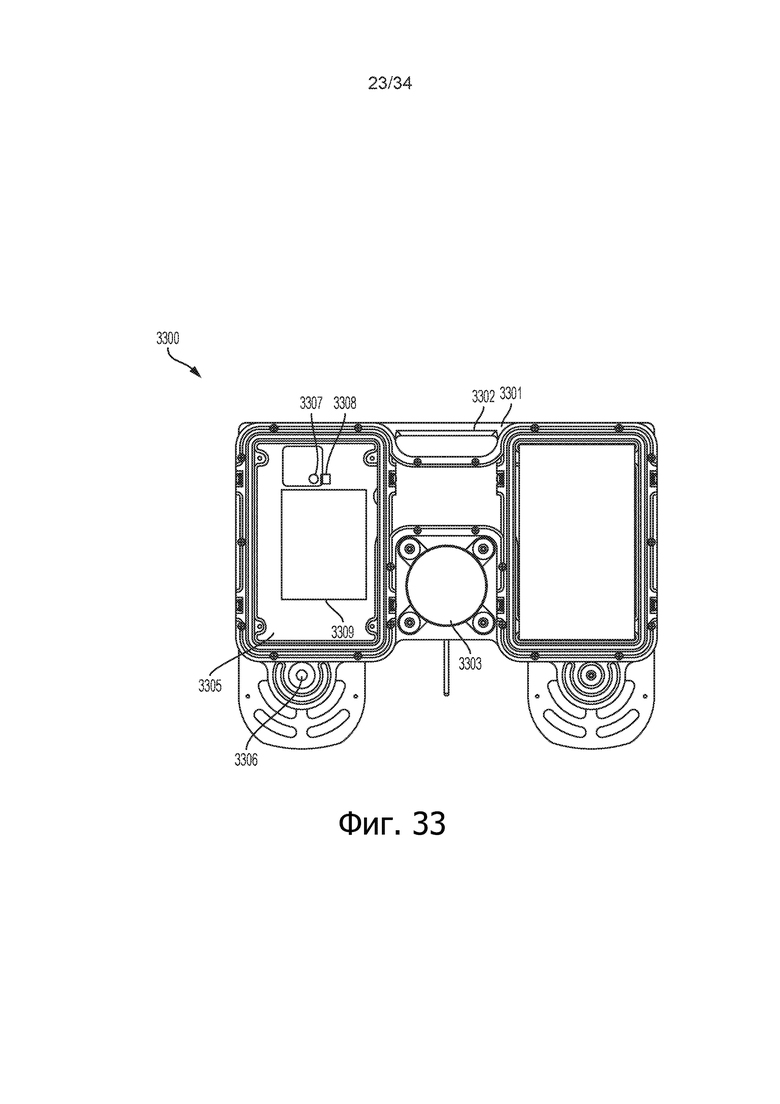
на фиг. 33 - вариант выполнения органа управления скоростью, основанный на магнитной педали, вид снизу;
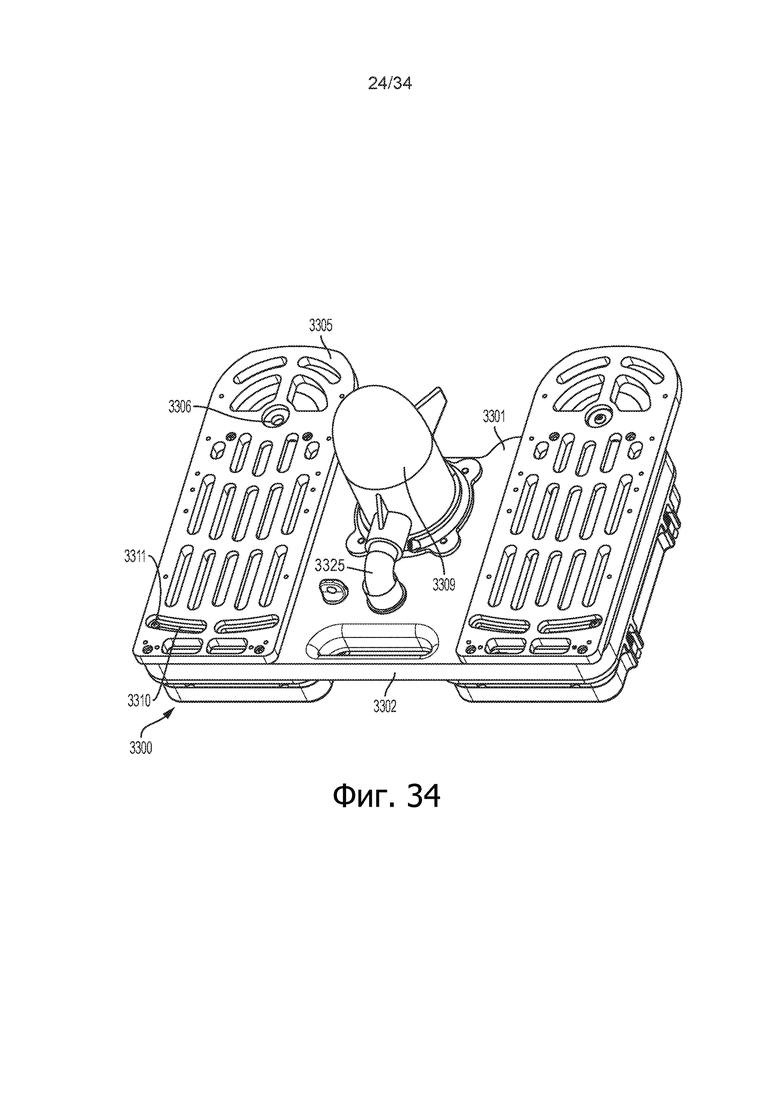
на фиг. 34 - вариант выполнения органа управления скоростью по фиг. 33, вид сверху в перспективе.
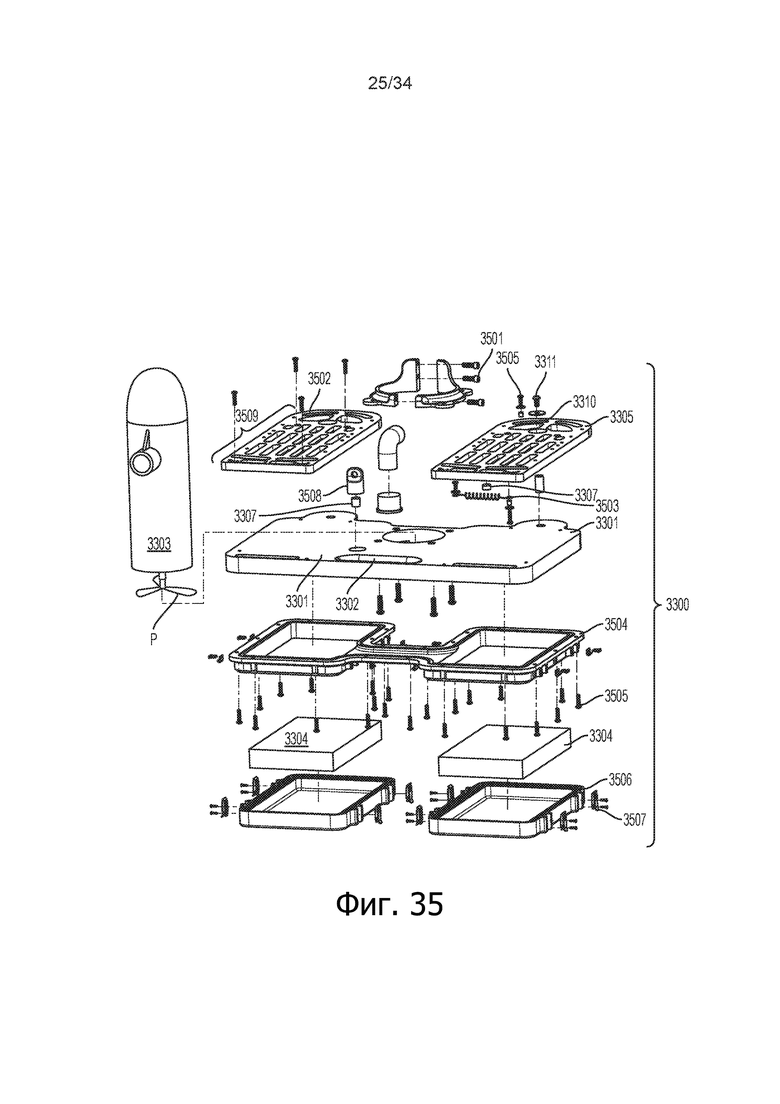
на фиг. 35 - вариант выполнения органа управления скоростью по фиг. 33, вид с разделением на части;
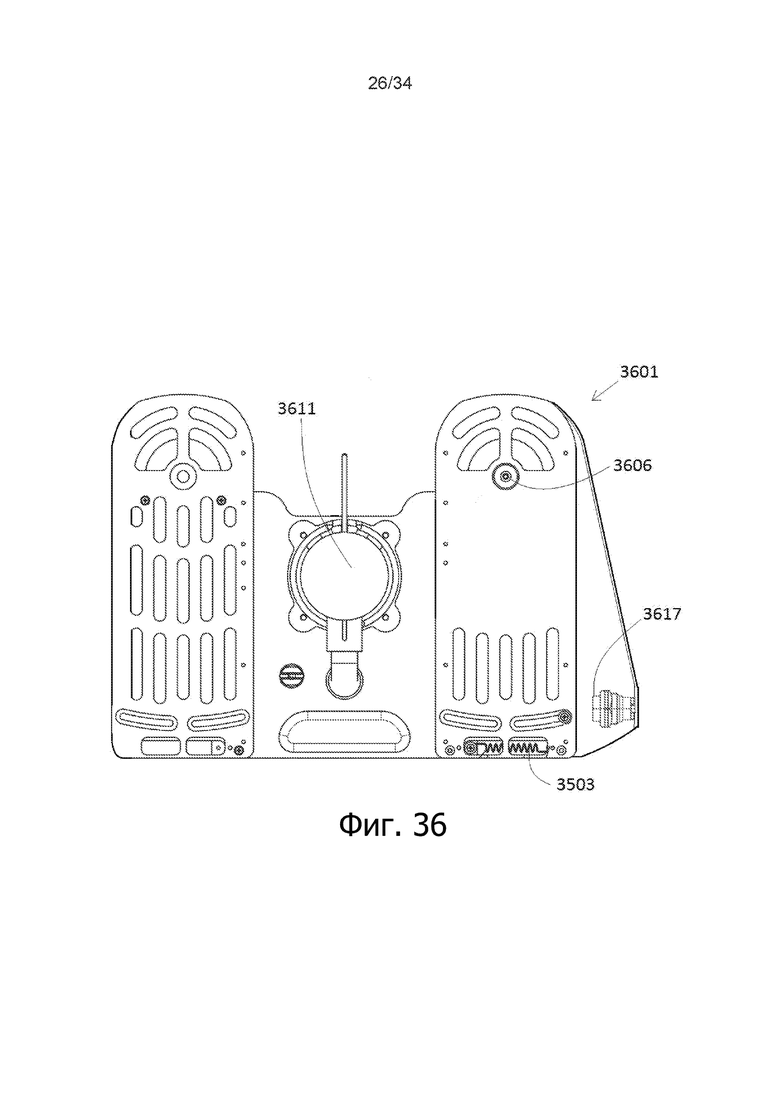
на фиг. 36 - педаль, вид сверху;
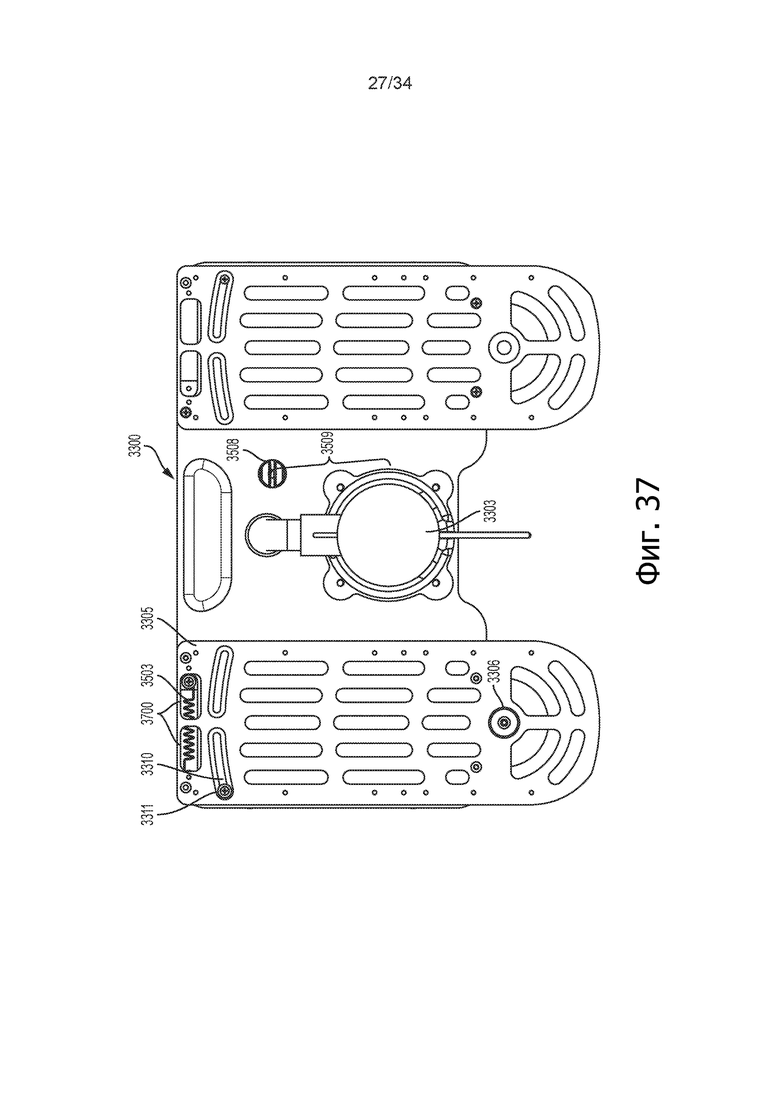
на фиг. 37 - подножная доска и аварийный выключатель, вид сверху;
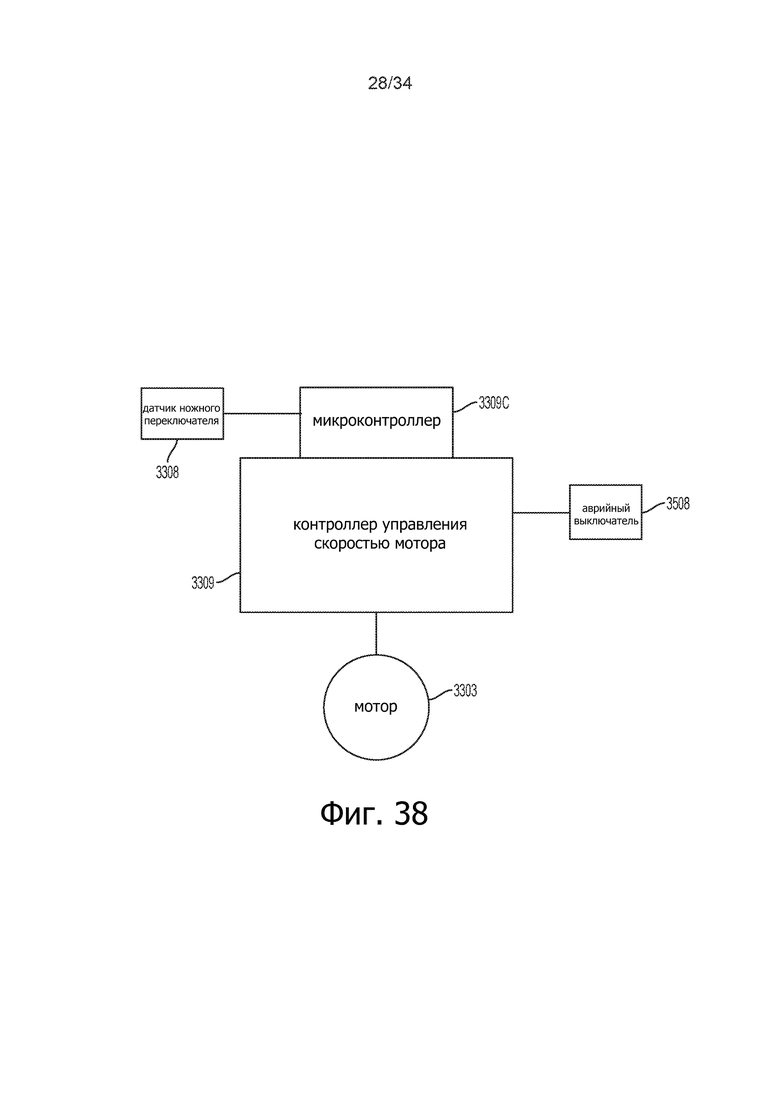
на фиг. 38 - схема подсистем электронной системы управления;
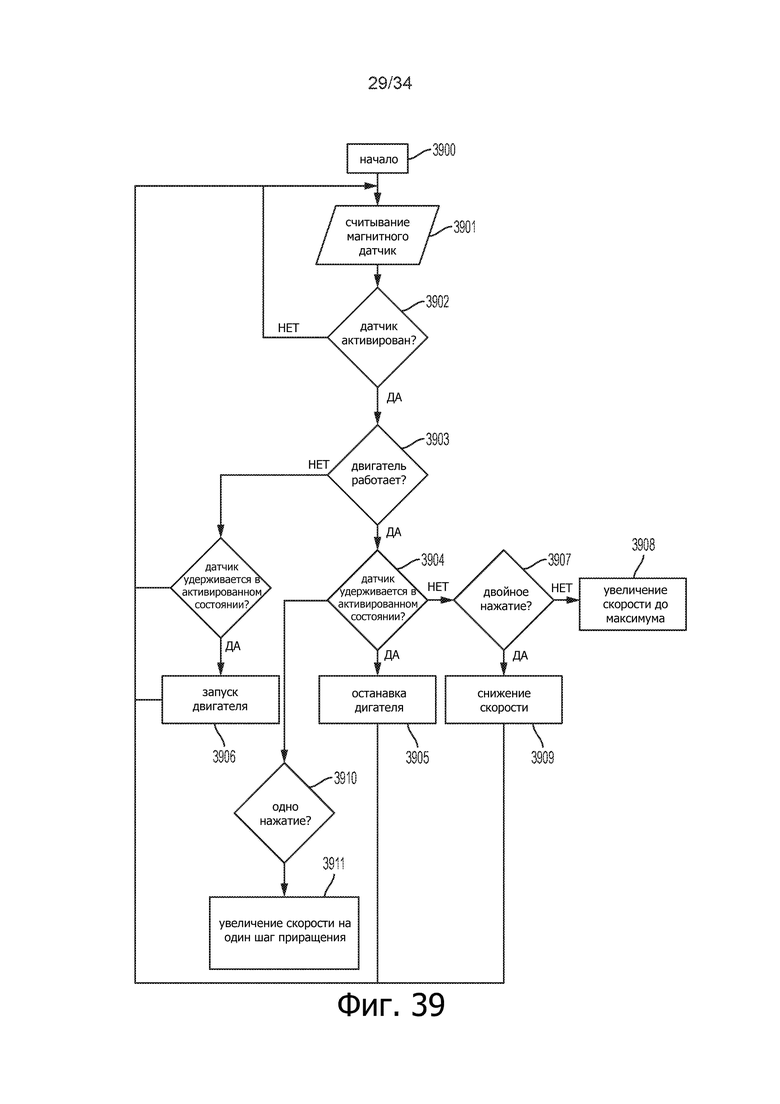
на фиг. 39 - блок-схема выполнения алгоритма логики управления;
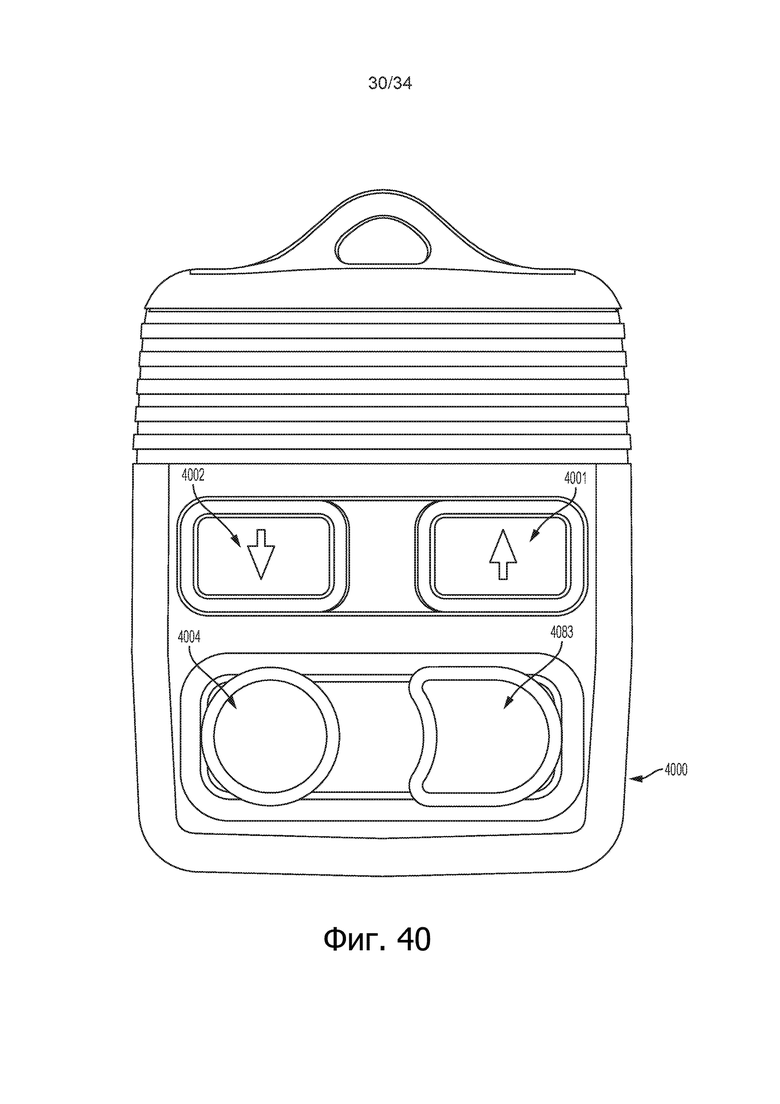
на фиг. 40 - пример контроллера беспроводной связи, вид сверху;
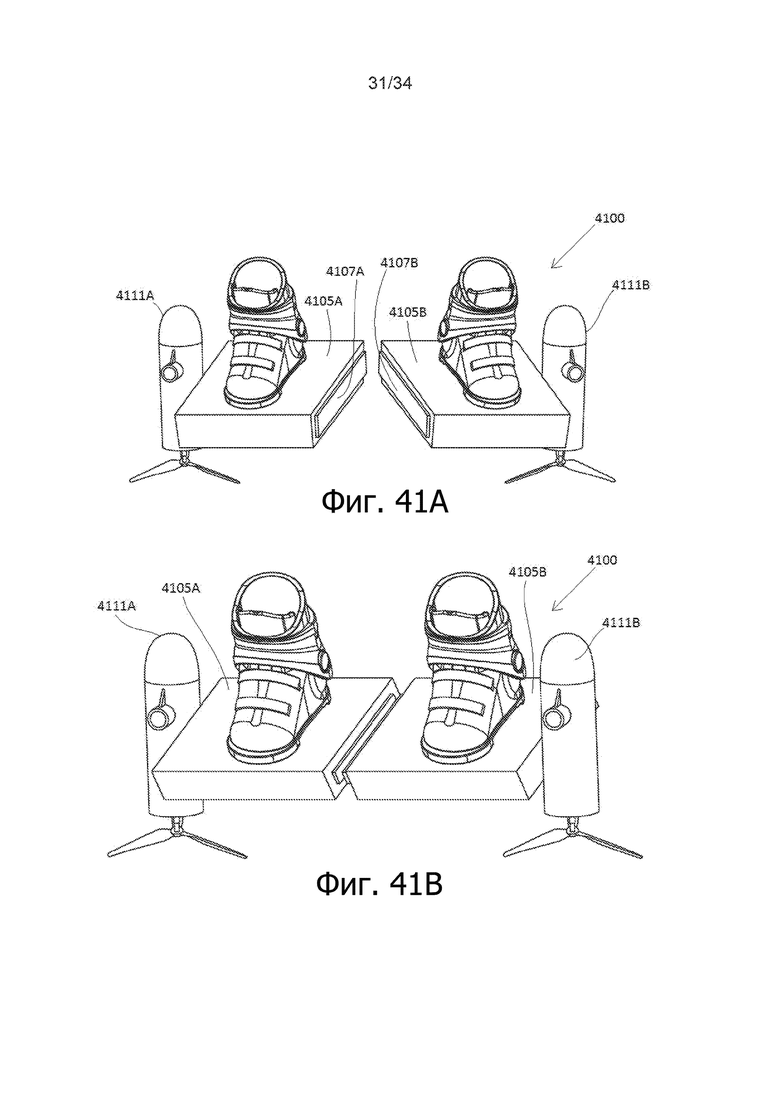
на фиг. 41А - другой вариант выполнения устройства, вид спереди в вертикальной проекции;
на фиг. 41B - другой вариант выполнения устройства по фиг. 41A, вид спереди;
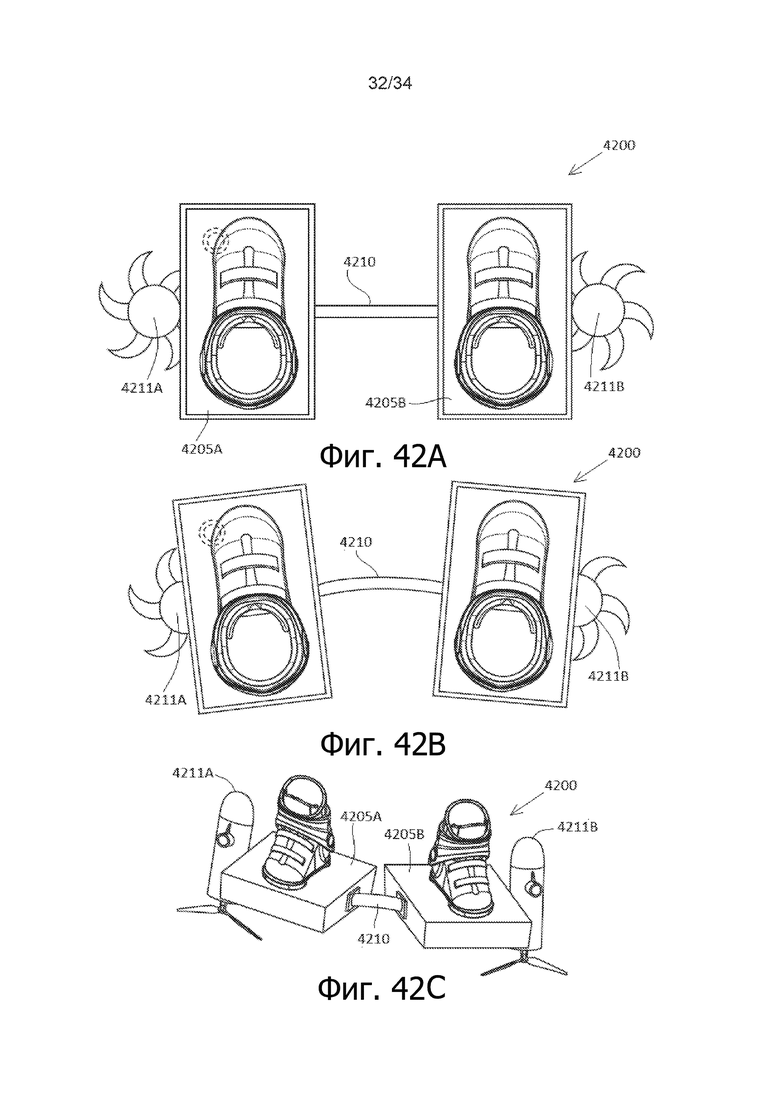
на фиг. 42A - другой вариант выполнения устройства, вид спереди;
на фиг. 42B - другой вариант выполнения устройства по фиг. 42A, вид спереди;
на фиг. 42C - другой вариант выполнения устройства по фиг. 42A, вид спереди;
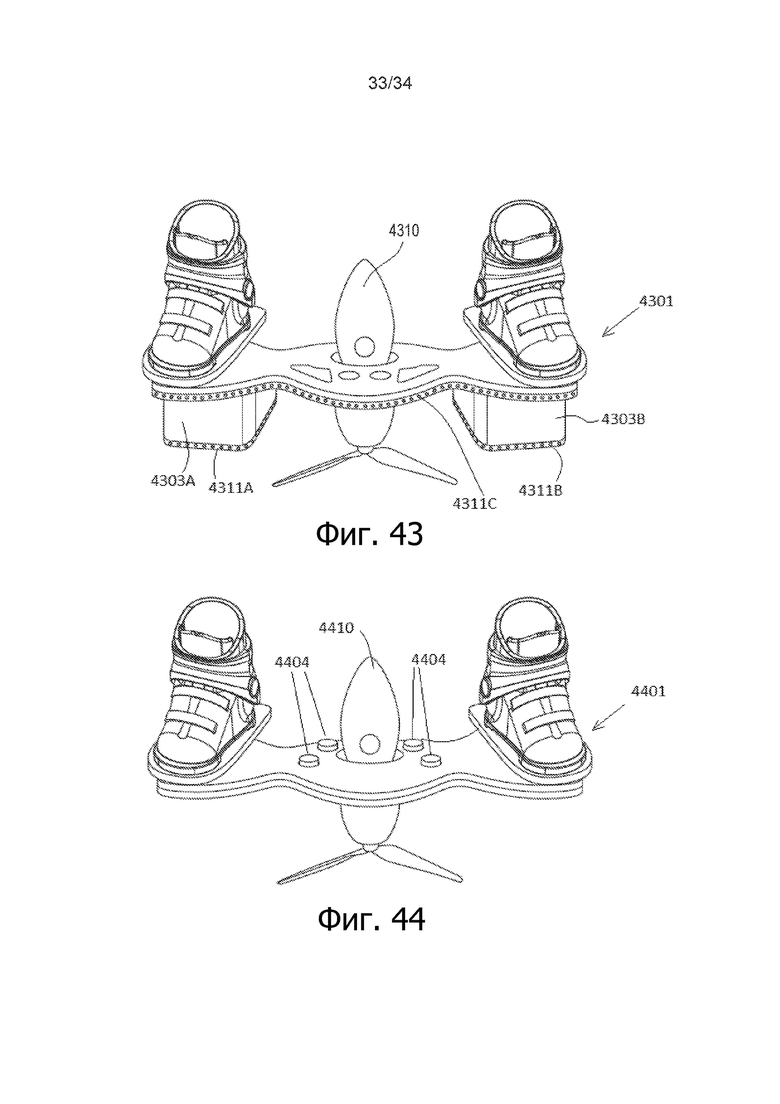
на фиг. 43 - другой вариант выполнения устройства, вид спереди в вертикальной проекции;
на фиг. 44 - другой варианта выполнения устройства, вид спереди в вертикальной проекции;
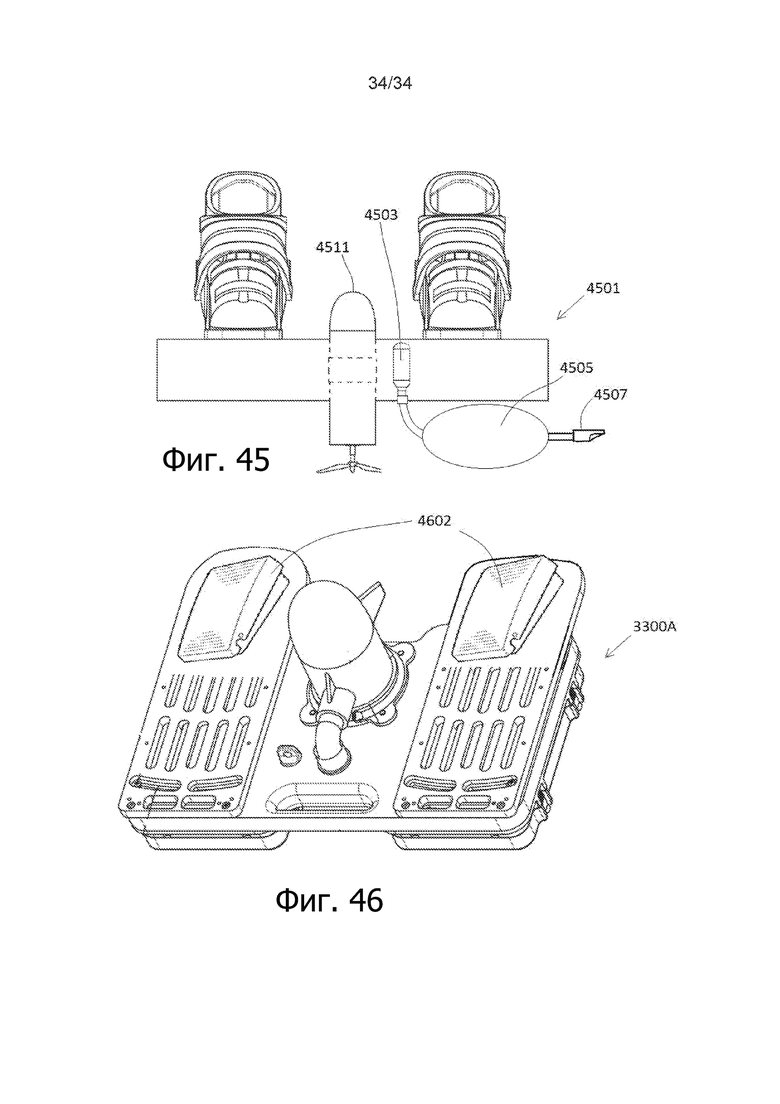
на фиг. 45 - другой вариант выполнения устройства, вид сбоку в поперечном разрезе;
на фиг. 46 - другой вариант выполнения устройства, вид спереди в вертикальной проекции.
Осуществление изобретения
Перед подробным описанием варианта осуществления изобретения, следует понимать, что изобретение не ограничено в его применении показанными деталями конкретного расположения, поскольку изобретение допускает другие варианты выполнения. Кроме того, терминология, используемая в этом описании, не вносит ограничения.
Как показано на фиг. 1, подножная доска 20 имеет левую часть 21 и правую часть 22 доски. Каждая часть 21, 22 доски имеет центральную вогнутую выемку такую, чтобы морской скутер 1 располагался примерно в средней точке продольной оси А морского скутера 1. Защелка 24 фиксирует левую часть 21 к правой части 22 вокруг морского скутера 1. Левый ремень 25 прикрепляет левую часть 21 доски посредством петли 27 к крюку 7. Правый ремень 26 прикрепляет правую часть 22 доски.
Каждый из ботинок L и R прикреплен к доске посредством крепежной конструкции. Такая крепежная конструкция может представлять собой крепление, аналогичное тому, которые используют для вейкборда, или водного слалома, или водных лыж, сноуборда или тех, которые используют для крепления SCUBA ласт, или для быстрого отсоединения ботинок. Нет необходимости использовать термин ботинки, так как босые ноги пользователя могут быть закреплены посредством крепежной конструкции, аналогичной SCUBA ластам, где стопа вставлена в углубление или петлю, и петля закреплена вокруг пятки для удержания ступни на месте. Там, где используются ботинки, крепления могут содержать Velcro ремни, крепления для лыж или сноуборда. Другой вариант выполнения, возможно, использует крепление для ботинок, такие как используются для педалей горного велосипеда, где фиксирование обеспечивается за счет защелкивания защелок, но соединение может быть легко отсоединено от педали из-за умышленного движения стопы пользователя. Далее будет описана крепежная конструкция. Такая крепежная конструкция обеспечивает быстрое разъединение, так что пользователь может легко освободить свою ступню от крепления в крепежной конструкции. Следует понимать, что, в этом документе управление регулятором устройства посредством ступни пользователя подразумевает использование ступни пользователя в ботинке или тому подобное.
На фиг. 2 показана подножная доска 200, которую прикрепляют так же, как согласно варианту 20 выполнения, но без ремней 25, 26. Для всех вариантов выполнения амортизирующие тросы или ремни могут быть добавлены для обеспечения дополнительной фиксации подножной доски к морскому скутеру.
Как показано на фиг. 3, ручки 3 размещаются в соответствующих углублениях на левой части 310 и правой части 320 подножной доски 300.
Как показано на фиг. 4, сплошная подножная доска 400 имеет центральное отверстие для размещения корпуса 2 двигателя над ручкой 3. Конусность корпуса 2 двигателя способствует соединению подножной доски 400 с морским скутером 1. Во время использования движущая сила морского скутера 1 будет иметь тенденцию удерживать его закрепленным в центральном отверстии подножной доски 400. Морской скутер 1 может быть дополнительно закреплен и стабилизирован к ножной платформе 400 тем же ранее описанным способом.
Как показано на фиг. 5, подножная доска 500 выполнена с двумя отверстиями для приема двух морских скутеров 1a и 1b. Секция 510 левой части подножной доски имеет вогнутое отверстие, которое проходит поверх корпуса 2b двигателя морского скутера, и секция 520 правой части подножной доски имеет вогнутое отверстие, которое проходит поверх корпуса 2а двигателя морского скутера. Петля 502 левой части подножной доски имеет амортизирующий трос или ремень 504, прикрепленный к ручке 3 морского скутера 1b, а также петлю 508, прикрепленную к противоположной ручке морского скутера 1b. Подобным образом, петля 501 правой части подножной доски имеет амортизирующий трос или ремень 503, прикрепленный к наружной ручке морского скутера 1а, а также петлю 505, прикрепленную к внутренней ручке 3 морского скутера 1а. Секция 510 левой части подножной доски может быть отделена от секции 520 правой части подножной доски посредством разъемного соединителя 502, например, защелки между двумя секциями платформы. Это позволяет разобрать устройство для облегчения транспортировки.
Как показано на фиг. 6, подножная доска 700 со встроенным аккумулятором имеет левую часть 701 и правую часть 702, интегрированные с корпусом 706 водного движительного агрегата 705, который может содержать моторизованный электрический винт, питающийся от легких литиевых аккумуляторов 703 и 704, которые герметично установлены в подножной доске 700. Вода поступает в окно 707 водного движительного агрегата 705 и выходит через винт из нижнего окна 708. На фиг. 7 показан вид сверху варианта выполнения по фиг. 6. Как будет далее описано в этом документе, в одном из вариантов выполнения, движительный агрегат может быть троллинговым мотором, как указано в описании, который, как правило, состоит из основного торпедообразного корпуса с гребным винтом.
На фиг. 8 показан другой вариант осуществления изобретения, в котором подножная доска 800 разделена на левую и правую половины 801 и 802, каждая из которых имеет свой собственный отдельный аккумуляторный движительный агрегат 705a и 705B. Как указано в этом описании, термин «половина» не следует рассматривать буквально, так что платформа разделена ровно поровну и следует понимать, что может быть реализовано разделение платформы на две части неравной ширины в данном описании, имеющей ширину платформы, способной поддерживать ступню на каждой из отдельных частей. Как использовано в этом описании, термин «часть» подножной доски может быть использован взаимозаменяемо с «половиной» или «половинами» части подножной доски.
В этом документе тонкие литий-ионные аккумуляторы 703 и 704 водонепроницаемым образом установлены внутри доски с герметизированными электрическими проводами, проходящими к моторам движительных агрегатов. Пользователь может зафиксировать левую часть к правой части платформы, используя защелку 803, но в предпочтительном варианте выполнения, защелка 803 позволяет левой и правой половинам доски 800 поворачиваться относительно друг друга. Таким образом, пользователь может наклонить одну из частей одной ногой вперед, а другой в обратном направлении, что позволяет обеспечивать более универсальное управление по курсу, при использовании устройства. Такая защелка может содержать эластичное соединение, такое, как эластичный ремешок или упругий элемент, что позволяет половине доски 800 поворачиваться, а также смещаться при их возврате в нейтральное положение.
Безопасное боковое соединение между половинами 801 и 802 может быть обеспечено охватывающим стержнем, выступающим наружу вдоль центральной оси доски 800 от одной из половин, в котором стержень выполнен с возможностью сопрягаться с отверстием на соответствующей стороне другой половины доски, тем самым, позволяя половине доски 800 отклониться относительно другой половины вокруг оси, проходящей через центр стержня.
Управляющее устройство 850 регулятора для движительного агрегата может быть беспроводным или проводным 851, как показано на чертеже. Одно управляющее устройство 850 может быть выполнено с отдельным регулированием движительных агрегатов 705a и 705b, или каждый из движительных агрегатов может быть спарен со своим собственным отдельным управляющим устройством регулятора. Обычно, оба движительных агрегата 705A и 705b управляются с одной скоростью, но позволяют управлять отдельным регулятором, обеспечивая пользователю большую маневренность. Микропроцессор в управляющем устройстве регулятора может быть выполнен с возможностью обеспечения того, чтобы тяга от одного из движительных агрегатов всегда совпадала с тягой другого движительного агрегата или, чтобы разность скоростей между одним движительным агрегатом и другим никогда не превышала определенного порогового значения. Обеспечение возможности отдельного управления регулятором для двух движительных агрегатов позволяет также использовать один для обратной тяги, а другой для прямой тяги, позволяя пользователю быстрее маневрировать, и позволяя пользователю изменять относительное осевое усилие двух движительных агрегатов, что позволит улучшить управление и маневренность. На фиг. 9 показан вид сверху в плане варианта выполнения, показанного на фиг. 8.
Далее на фиг. 10 показана доска 900 с индивидуально поворотными частями, как описано по отношению к варианту выполнения на фиг. 8. Соединительное звено 901 выполнено в виде соединителя, имеющего поворотную опору, обеспечивающую поворот вокруг оси, проходящей через половины доски. Несмотря на то, что подножная доска показана на этом и предшествующих чертежах с плоской поверхностью, она также может быть гидродинамической поверхностью подножной доски, чтобы быть изогнутой для уменьшения сопротивления воды, когда устройство находится в рабочем состоянии. Например, края подножной доски могут иметь направленную вниз кривизну от креплений ботинок, чтобы позволить воде более легко обтекать вокруг них.
Несмотря на то, что на фиг. 6-10 показаны движительные агрегаты с плоскими гребными винтами, обнаружено, что устройство очень хорошо работает с троллинговыми моторами, используемыми в качестве движительных агрегатов. Троллинговый мотор представляет собой подводный электрический гребной винт, который, как правило, присоединен к длинному стержню и используется в качестве импровизированного подвесного мотора на небольших одно- или двухместных моторных лодках. Хороший троллинговый мотор может генерировать силу тяги 50 фунт или больше, а также существуют модели, которые даже, по существу, значительно более мощные, чем 100 фунт силы. Таким образом, троллинговые моторы, в частности, являются более мощными, чем известные моторы ручных движительных агрегатов. Как указано в этом описании термин «троллинговый мотор» не ограничивается буквально двигателями, продаваемыми в качестве троллинговых моторов, но подразумевает любые электрических гребных двигателей аналогичной конструкции или мощности. Примером пригодного троллингового мотора является мотор Haswing Protruar 24v, 2,0 л.с., который рассчитан на 110 фунт тяги; или Minn Kota Saltwater Riptide, который рассчитан на 101 фунт тяги; или Newport Vessel, который рассчитан на 55 фунт тяги.
Коммерчески доступные троллинговые моторы, например, упомянутые ранее, возможно, необходимо переоборудовать для работы на глубинах более 30 футов. Могут быть использованы известные прокладки для высокого давления, например, для герметизации подводного оборудования для видеосъемки, которые более пригодны для эксплуатации при значительной глубине, чем прокладки, используемые для обычных коммерческих троллинговых моторов, доступных на момент написания этого документа. Многие из таких прокладок часто изготовлены из полиуретанового материала или аналогичного полимера. Водонепроницаемые уплотнение для глубоководных погружений также может быть достигнуто путем изготовления корпуса мотора, имеющего несколько рядов прокладок в уплотнительных соединениях. Отрицательное пространство внутри камеры корпуса мотора также может быть заполнено маслом для предотвращения проникновения воды во время глубоких погружений, с впускными и выпускными клапанами для слива и замены масла. Высококачественное минеральное масло не является электропроводящим и будет работать для этой цели, хотя может быть предпочтительным применение профессионального сорта трансформаторного масла (как используется в коммерческих электрических трансформаторах).
Как показано на фиг. 11 показан известный морской скутер 1, имеющий ручку 3 и 300 с кнопками 12 регулировки скутера на каждой стороне 20. Рычажный узел 161 регулятора может быть прикреплен к ручке 300 со вторым узлом 161 регулятора, прикрепленным к ручке 3. Этот вариант выполнения имеет кабель 162 внутри оболочки, который подключен к ручному устройству управления 163, которое имеет исполнительный курок 164. Курок 164 тянет головку 166 кабеля 167 управления так, чтобы наклонить рычаг 165 регулятора 12 скутера.
На фиг. 12 показан пример рычажного узла для регулятора. Когда кабель 162 вытягивают, он побуждает рычаг 165 надавливать на кнопку 12 регулятора. На фиг. 13A, 13B, 13C, 13D и 13E показан рычажный узел 161 для регулятора с разных сторон. На фиг. 13D пунктирной линией показан рычаг 165 в нейтральном положении ВЫКЛ. Рычаг 165 шарнирно установлен вокруг вала 165а, который прикреплен к стенке 191. Стенка 191 имеет болты 192 крепления её к блоку 193. Установочный винт 194 крепит вал 190. Как показано, кабель 162 заканчивается на конце 166, при этом когда кабель 16 вытягивается, конец 166, в свою очередь тянет вниз рычаг 165, который затем надавливает на курок регулятора. На фиг. 14 показан пример рычажного узла регулятора с разделением на части.
На фиг. 15 показана доска 2000 скутера, имеющая установочное отверстие 2001 для размещения морского скутера. Кронштейны 2002 удерживают обжимные хомуты 2003 для фиксации морского скутера в установочном отверстии 2001. Может использоваться защитный экран 2004. Правая часть 2005 подножной доски имеет поворотное крепление 2006 ботинка, так что оно может быть перемещено из положения O или в положение I посредством поворота носка T правого ботинка R. Противоположенное крепление является опциональным, где поворачивают носок и пятку, чтобы вдвигать и выдвигать, как показано на фиг. 22 и фиг. 23. По мере того, как носок Т вдвигают по направлению I, конец 166 кабеля тянет кабель 167 управления и рычаг 165 в рычажном узле 161 для регулятора нажат в курковом устройстве морского скутера. Таким образом, этот вариант осуществления позволяет пользователю управлять регулятором посредством поворота ступни на поверхности подножной доски, где пружина побуждает вернуть смещение ступни обратно в нейтральное положение.
На фиг. 16 показан вид снизу в перспективе варианта выполнения, показанного на фиг. 15, а на фиг. 17 показан вид сверху этого же варианта выполнения. Фиг. 18 и фиг. 19 аналогичны фиг. 16 и фиг. 17, за исключением обратного крепления кабелей 167 управления. Как можно видеть, во время ускорения подпружиненный шарик 2010 толкает пластинчатую пружину 2011 внутрь. Как показано, пружина 2011 возвращает рычаг 165 в нейтральное положение, когда пользователь прекращает перемещать носок ботинка в направлении I.
На фиг. 20 и фиг. 21 показаны установленные ботинки L и R в их соответствующие ножные платформы 2030 и 2005 с помощью крепежной конструкции (как описано ранее со ссылкой на фиг. 1). Отверстие 2300 позволяет кабелю 162 выйти из-под соответствующих ножных платформ. На фиг. 22 показан вид сверху в перспективе устройства, в котором шарнирные соединения 2002b и 2002d расположены в области пятки. На фиг. 23 показан вид снизу устройства на фиг. 22. На фиг. 24 показано разделенное на части устройство, а на фиг. 25 показано устройство со вставленным морским скутером.
На фиг. 26, 27 и 28 показаны способы установки морского скутера с проводным или беспроводным управляющим устройством посредством L-образного кронштейна 3003 к корпусной пластине 3001 или 3004 с наплечными ремнями 3002 для пловца. Ремни 2003 фиксируют морской скутер на L-образном кронштейне 3003. Эта L-образная конфигурация кронштейна позволяет использовать универсальные средства крепления. На фиг. 30 показан вариант 5001 выполнения подножной доски, в котором используются L-образные кронштейны 3003A и 3003B и ремни 2003 для крепления левой и правой части подножной доски с ботинками L и R.
На фиг. 31 показано быстроразъемное соединение ботинок RQ и LQ, которое имеет нижний фланец 3100, входящий в паз 3101 на соответствующих левой и правой частях 3102 и 3103 подножной доски. Когда скользящий рычаг 3999 находится в нейтральном положении NU, фланец 3100 может быть вставлен в паз 3101. Когда рычаг 3999 перемещают в положение LK блокировки, показанном пунктирной линией, и перемещение, показанное стрелкой LK, стержень 3109 проходит через отверстие HL во фланце 3100, запирая ботинки на соответствующих частях 3102 и 3103. На фиг. 32 показаны рычаги в заблокированном положении. Ботинки могут быть освобождены, потянув за рычаг 3999 обратно в нейтральное положение.
На фиг. 33 показан вид сверху нижней стороны электронного ножного управления доски 3300 (фиг. 34 показывает устройство с верхней стороны). Основание 3301 имеет переднюю транспортировочную ручку 3302. На двигатель 3303 винта может быть подано напряжение постоянного тока от перезаряжаемой литий-ионной батареи водонепроницаемого типа. Силовые провода и проводка являются водонепроницаемыми и могут быть запечатаны в силиконе или тому подобном. Левая педаль 3305 имеет шарнирное крепление 3306 к основанию 3301 (соответствующее шарнирное крепление на правой части подножной доски показано, но не обозначено). Ботинки пользователя надежно крепятся посредством ремней и зажимного механизма к шарнирной педали через крепежный механизм (как описано выше со ссылкой на фиг. 1), затем шарнирная педаль имеет отверстие, которое принимает и блокирует выступ от нижней стороны носка ботинка пользователя, позволяя пользователю поворачивать ступни в основании 3301 вокруг оси, проходящей через их пальцы, в результате чего, каблуки ботинок перемещаются из стороны в сторону на задней части основания 3301. Эта конфигурация может быть легко изменена на противоположную, в которой каблуки ботинок установлены на шарнире так, чтобы носки ботинок могли перемещаться из стороны в сторону.
Магнит (или эквивалентный передатчик) 3308 прикреплен к задней части педали 3305, и магнитный (или передатчик) датчик 3307 соединен с основанием 3301. Датчик 3307 имеет электронное соединение с контроллером 3309 скорости двигателя. Контроллер скорости двигателя может быть контроллером с широтно-импульсной модуляцией (PWM). Датчик 3308 может быть датчиком, основанным на эффекте Холла. Положение магнита и датчика может быть изменено в зависимости от компоновки. Контроллер 3309 скорости двигателя является процессором потоковой обработки программного обеспечения, который считывает состояние магнитного датчика 3307 в основном контуре. Если датчик 3307 был активирован, процессор 3309 проверяет, работает ли двигатель. Если двигатель 3303 работает и датчик 3307 удерживается в активированном состоянии в течение более чем Х секунд, двигатель 3303 выключатся. Если двигатель работает, и датчик активирован в течение менее Х секунд, скорость увеличивается на один шаг (если уже работает на максимальной скорости, то, в этом случае, ничего не происходит). Если датчик 3307 активируется два раза подряд, и двигатель работает, скорость уменьшается на один шаг (если уже работает на нижней скорости, то, в этом случае, ничего не происходит). Если двигатель выключен, и переключатель удерживается в активированном состоянии в течение более Х секунд, двигатель включается на самой низкой скорости.
За счет применения шарнирного крепления педали и датчиков, пользователь может управлять регулятором движительного агрегата путем поворота ботинок (и, таким образом, педали) на поверхности основания 3301 относительно оси шарнирного крепления, при этом датчик обнаруживает величину перемещения противоположного (перемещающегося) конца ботинка, и преобразовывает величину перемещения в требуемую величину управления регулятором. Перемещение стопы, кроме поворота, может также рассматриваться для управления регулятором, например, посредством подпружиненной педали при нажатии носком ботинка пользователя, аналогично обычному акселератору газа автомобиля. Такой вариант показан на фиг. 46.
В качестве альтернативы использованию степени перемещения стопы для управления регулятором, датчик 3307 может содержать электрический переключатель, соединенный с электрической схемой и микропроцессором. В варианте выполнения переключателя, микропроцессор может быть запрограммирован так, что каждое срабатывание переключателя, вызванное перемещением стопы, побуждает движительный агрегат переключать различные уровни тяги. Например, каждое новое срабатывание переключателя может увеличить величину управления регулятором до последнего уровня и затем величина обратно возвращается к нулю. Процессор также может быть запрограммирован для изменения тяги на основании конкретного шаблона срабатывания переключателя, например, увеличение величины управления регулятора на основании двух срабатываний в быстрой последовательности. Как показано на фиг. 36, подножная доска 3601 имеет движительный агрегат 3611 и педаль, установленную на шарнире 3606, и соединенную с пружинным возвратом 3503, который перемещает педаль обратно в нейтральное положение, когда пользователь не оказывает какое-либо поворотное усилие на педаль. Переключатель 3617 с кнопкой крепится к боковому расширению подножной доски 3601 и расположен так, что педаль имеет возможность его нажать, когда пользователь поворачивает ступню и заставляет педаль поворачиваться вокруг шарнира 3606.
На фиг. 34 показан движительный агрегат 3309, который имеет винт P, показанный на фиг. 35, ниже основания 3301. Как показано на чертеже, этот движительный агрегат аналогичен троллинговому мотору (описано выше), который обеспечивает более значительную тягу, чем у обычного морского скутера. Такая конструкция не требует какой-либо электроники для установки на педаль 3305. Только магнит 3307 (показан на фиг. 35) должен быть установлен на шарнирной педали 3305. Передний паз 3310 может направлять педаль 3305 со стопором 3311, функционирующим в качестве направляющего стержня и ограничителя максимального перемещения. На чертеже показана водонепроницаемая трубка 3325 для размещения проводки электропитания, ведущая из аккумуляторного отсека внутри платформы к движительному агрегату 3309.
На фиг. 35 показан кронштейн 3501, прикрепляющий двигатель 3303 к основанию 3301. Правая педаль 3502 и дублированные элементы управления являются опциональными. Аварийный выключатель 3508 имеет привязь 3509 к ноге пользователя (не показано), если пользователь начинает отделяется от платформы, нога пользователя потянет привязь и активирует аварийный выключатель, тем самым, выключит движительный агрегат. Пружинный возврат 3503 возвращает педаль 3305 в нейтральное прямолинейное положение. Разделитель 3504 платформы обеспечивает крепление одной или нескольких аккумуляторов 3304. Винты 3505 показаны по мере необходимости. Крышка 3506 аккумулятора имеет крепежные элементы 3507 для быстрого подключения к разделителю 3504 платформы. Прокладка пересекает верхний край крышки 3506 и обеспечивает герметичность аккумуляторного отсека при прижатии к разделителю 3504 и разделитель 3504, в свою очередь, имеет периферийную прокладку, которая входит в зацепление с нижней стороны основания 3301 доски.
Преимущество конструкции доски, например, как показано на фиг. 35, заключается в том, что доска образована и сконфигурирована так, что имеет тонкий профиль, например, четыре дюйма или меньше, а также использование плоских аккумуляторов позволяет сохранить тонкий профиль. Тонкая доска легко переносится пользователем, и её общий вес со встроенным плоским аккумулятором может быть только около 30-40 фунтов, если при изготовлении доски, в основном, используют легкие полимерные материалы. Как указано в этом описании, термин «встроенный» относится не только к размещению в корпусе подножной доски, но также включает в себя непосредственное прикрепление к ножной платформе или закрепление на ней.
На фиг. 37 показаны возможные ремонтные отверстия 3700 для возвратной пружины 3503. На фиг. 38 показана подсистема микроконтроллера 3309С, программируемая как показано на фиг. 39, или с многими эквивалентными этапами логики, как известно специалистам в этой области техники. Перемещение педали или переключателя (не показано) обеспечивает начальный этап 3900 работы логики в микроконтроллере 3309C. Датчик 3308 считывается на этапе 3901. Если датчик активирован на этапе 3902, логика на этапе 3903 продолжает определять работает ли двигатель. Если датчик удерживается в состоянии ВКЛ на 3904, двигатель останавливают на этапе 3905, если он работает. Если двигатель был выключен, затем включают двигатель на этапе 3906. Двойное нажатие на этапе 3907 либо максимально увеличивает скорость на 3908 или, если уже работает на максимальной скорости, уменьшает скорость на этапе 3909, одно нажатие на этапе 3910 может увеличить скорость на один шаг на этапе 3911. Возможны другие варианты согласно этому программированию и функциям. Задача заключается в том, чтобы дать пользователю возможность управлять регулятором посредством использования ступни на подножной доске.
Другая управляемая компьютером система, которая может преимущественно применяться с описанным устройством, может использовать ограничитель скорости, активируемый в зависимости от глубины. В этом варианте выполнения глубиномер может быть встроен в подножную доску и электрически соединен с управляющим устройством регулятора. Затем предварительно заданные параметры могут быть использованы пользователем для управления регулятором на основании глубины, или пользователь может изменять параметры при использовании подножной доски. Другой вид ограничителя скорости может быть использован для предварительно заданной максимальной скорости для подножной доски на основании уровня мастерства пользователя или ожидаемых условий погружений. Таким образом, максимальная скорость новичка может быть установлена ниже, или максимальная скорость также может быть установлена ниже для мест погружений в непосредственной близости от затонувшего судна.
На фиг. 40 показан альтернативный вариант выполнения пульта 4000 управления, который может либо заменить педаль, либо дополнить вариант выполнения, имеющий педаль, для обеспечения выбора резервного варианта или пользователя. В этом случае требуется антенна (не показана) для обеспечения функционирования микроконтроллера и приемника (который обычно принимает радиочастотный сигнал на глубине не более девяти футов под водой). На чертеже показаны кнопки управления скоростью, а именно, кнопка 4001 увеличения скорости или кнопка 4002 снижения скорости, кнопка 4004 остановки и кнопка 4003 запуска. Такой пульт 4000 управления может быть закреплен как часы на запястье пользователя.
Несмотря на то, что изобретение было описано со ссылкой на описанные варианты выполнения, возможны многочисленные модификации и вариации, результат которых не будет выходить за рамки объема изобретения. В отношении конкретных вариантов выполнения, описанных в этом документе, не подразумеваются какие-либо ограничения. Каждый вариант выполнения устройства, описанного здесь, имеет различные эквиваленты.
Со ссылками на фиг. 41A и 41B показан вариант выполнения, в котором подножная доска 4100 разделена на левую и правую половины 4105A и 4105B, которые разъемно соединены магнитными поверхностями 4107A и 4107B, которые образуют магнитную связь при соединении. Поверхностные элементы платформ, такие как шарнирное крепление педали и управляющее устройство регулятора, не показаны для упрощения понимания. Литий-ионные аккумуляторы могут быть герметично размещены в корпусах левой и правой частей с герметичными проводами, соединенными с движительными агрегатами 4111A и 4111B, показанными, как троллинговые моторы. Как показано на фиг. 41В, обе половины подножной доски могут быть сцеплены вместе посредством магнитного притяжения. Тем не менее, сила магнитного поля может быть установлена так, чтобы позволить пользователю разъединить две половины платформы путем применения умышленной распорной силы, или сдвинув половины параллельно друг другу. Магниты также могут быть сконфигурированы так, чтобы позволить двум половинам подножной доски поворачиваться по отдельности друг от друга, оставаясь при этом соединенными. Конечно, две половины подножной доски могут быть соединены вместе с помощью жестких защелок, или с помощью стержневого соединителя «охватываемого-охватывающего» типа для образования одной платформы, но такая одна соединенная платформа не позволит осуществить относительное перемещение одной половины к другой.
На фиг. 42A, 42B и 42C показана подножная доска 4200, разделенная на половины 4205A и 4205B. Поверхностные элементы платформы, такие как шарнирное крепление педали и управляющее устройство регулятора, не показаны для упрощения понимания. Литий-ионные аккумуляторы могут быть герметично установлены в корпусах левой и правой частях с герметичными проводами, присоединенными к движительным агрегатам 4211А и 4211B, показанным, как троллинговые моторы. Соединительное устройство 4210 удерживает половины 4205A и 4205B вместе. Это соединительное устройство 4210 может включать в себя жесткий стержень фиксированной длины, установленный на подшипниках или шарнирных опорах во внутренних сторонах каждой половины 4205A и 4205B, для обеспечения поворота относительно друг друга указанным половинам. Так, например, одна половина доски может выступать как охватывающий стержень, который взаимодействует с подшипником на противоположной половине доски. В качестве альтернативы, соединительное устройство 4210 может содержать гибкий соединитель, например, из жесткого полимерного материала, выполненный с возможностью обратно принимать форму прямого стержня и изгибаться или скручиваться в неопределенных направлениях под действием силы ботинка пользователя, как показано на фиг. 42B и 42C, позволяя половинам 4205A и 4205B принимать широкий спектр различных относительных положений и ориентации относительно друг друга. В качестве альтернативы, соединительное устройство 4210 может быть изготовлено из нежесткого, но прочного материала (например, полимерного шнур), который позволяет осуществлять абсолютно неограниченное относительное перемещение половин 4205A и 4205B, предотвращая отделение половин на расстояние, превышающее заданное расстояние соединительного устройства. Как известно специалистам в данной области техники, соединительные устройства, такие как ремни, могут быть выполнены с возможностью регулировки длины.
На фиг. 43 показан вариант выполнения подножной доски 4301, в котором лента 4311C водонепроницаемых светодиодных огней огибает по периметру доску, и может быть использована для определения местоположения аквалангиста под водой в темноте или мутной воде. На чертеже показаны дополнительные светодиодные ленты 4311A и 4311B, опоясывающие увеличенные в размере корпуса 4303A и 4303B аккумуляторных отсеков, приспособленные для размещения аккумуляторов большого размера с более значительным зарядом для комбинированного двигателя и системы освещения.
На фиг. 44 показан вариант выполнения подножной доски 4401, которая снабжена дополнительными грузами 4404 для погружения, которые могут быть вставлены в пазы соответствующей формы в доске 4401. Доска может быть выполнена так, чтобы в пресной воде была нейтральная плавучесть, с возможностью добавления грузов в качестве балласта в соленой воде.
На фиг. 45 показан вариант выполнения подножной доски 4501, которая включает в себя небольшой резервуар 4503 сжатого воздуха, заполненный сжатым CO2 или тому подобным и выполненный с возможностью высвобождения пользователем для накачивания емкости 4505, которая может быть использована для автоматического всплытия доски 4501 на поверхность воды, если пользователь отделяется от доски или намерен отделить доску для её отдельного всплытия. Предусмотрен также выпускной клапан 4507.
На фиг. 46 показан вариант 3300A выполнения подножной доски 3300, ранее показанной на фиг. 34, в котором переключение регулятора осуществляют посредством носка педали 4602.
Несмотря на то, что изобретение описано на примере примерных вариантов выполнения, изобретение этим не ограничивается. Приложенная формула изобретения также включает в себя другие вариации и варианты выполнения, которые могут быть сделаны специалистами в рамках охраняемого объема и диапазона эквивалентов этого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничный лежачий электроскутер | 2022 |
|
RU2793388C1 |
| Водный степпер | 2022 |
|
RU2779665C1 |
| ИНДИВИДУАЛЬНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2016 |
|
RU2628267C1 |
| ПРОПРИОЦЕПТИВНОЕ/КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ | 2003 |
|
RU2343946C2 |
| Лежачий электроскутер-внедорожник | 2022 |
|
RU2793636C1 |
| Способ моторизации и управления понтоном в составе понтонно-мостового парка и двигательно-рулевая установка для осуществления способа | 2021 |
|
RU2770057C1 |
| Моноколесо с антипродавливателем | 2016 |
|
RU2637143C1 |
| ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2457148C1 |
| Водный велосипед (вопед) | 2021 |
|
RU2772919C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ В ГИБРИДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ | 2017 |
|
RU2723577C2 |

Изобретение относится к подводной двигательной системе, содержащей подножную доску с одним или несколькими питающимися от аккумулятора движительными установками. Система управления регулятором может быть установлена в подножной доске так, что перемещение стопы пользователя управляет регулятором. Плоские литиевые батареи позволяют обеспечить легковесную конструкцию подножной доски. Применение троллингового мотора в качестве движительного агрегата обеспечивает существенные преимущества по сравнению с ранее известными подводными скутерами. 19 з.п. ф-лы, 46 ил.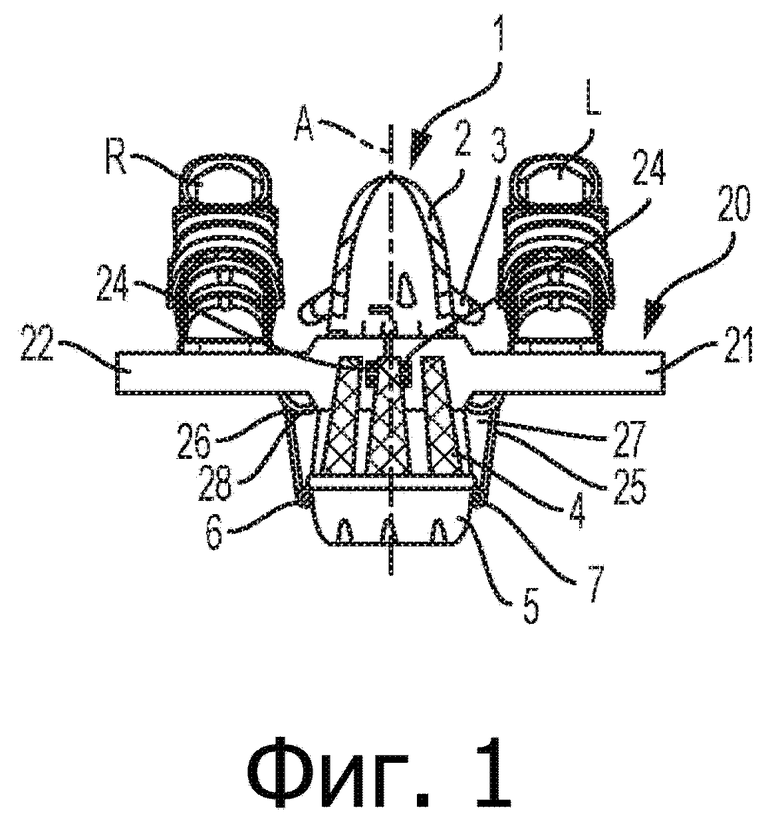
1. Подводный движитель, содержащий:
(а) подножную доску;
(b) аккумулятор, герметично установленный в водонепроницаемый отсек, который встроен в подножную доску;
(с) питающийся от аккумулятора подводный движительный агрегат, прикрепленный к подножной доске и подсоединенный к аккумулятору посредством водонепроницаемого соединения;
(d) крепежную конструкцию на подножной доске для крепления стопы пользователя;
(е) систему управления регулятором, встроенную в подножную доску и приспособленную для управления регулятором движительного агрегата посредством перемещения стопы пользователя.
2. Движитель по п. 1, в котором подножная доска содержит две части, каждая из которых имеет крепежную конструкцию для одной из ступней пользователя, при этом указанные части подножной доски выполнены с возможностью соединения между собой соединительным устройством, позволяющим этим частям поворачиваться относительно друг друга.
3. Движитель по п. 2, в котором соединительное устройство содержит поворотную опору.
4. Движитель по п. 2, в котором соединительное устройство содержит магниты.
5. Движитель по п. 2, в котором соединительное устройство содержит гибкий соединитель, стремящийся вернуться в прямое положение, при отсутствии приложенной к нему сгибающей силы.
6. Движитель по п. 2, в котором соединительное устройство содержит гибкий трос.
7. Движитель по п. 1, в котором система управления регулятором содержит крепление педали, выполненное с возможностью наклонного перемещения, при этом регулятор движительного агрегата выполнен с возможностью управления посредством наклонного перемещения стопы пользователя.
8. Движитель по п. 7, в котором система управления регулятором является электронной, при этом движитель содержит датчик, выполненный с возможностью обнаружения перемещения крепления педали.
9. Движитель по п. 7, содержащий электрический переключатель и программируемый микропроцессор, запрограммированный на срабатывание переключателя при наклонном перемещении стопы для увеличения тяги движительного агрегата.
10. Движитель по п. 1, в котором крепежная конструкция содержит крепление ботинка, выполненное с возможностью разъемного соединения с ботинком, и дополнительно содержит ползунок для блокировки и разблокировки ботинка в его креплении.
11. Движитель по п. 1, в котором движительный агрегат является троллинговым мотором.
12. Движитель по п. 1, в котором движительный агрегат способен развивать силу тяги не менее 100 фунтов.
13. Движитель по п. 1, в котором движительный агрегат включает в себя электродвигатель, расположенный внутри водонепроницаемого корпуса, при этом отрицательное внутреннее пространство корпуса заполнено маслом.
14. Движитель по п. 1, в котором подножная доска имеет две крепежные конструкции и два движительных агрегата, при этом первый движительный агрегат установлен на противоположной стороне доски от второго движительного агрегата.
15. Движитель по п. 14, в котором толщина подножной доски, содержащей встроенный аккумулятор, составляет менее четырех дюймов.
16. Движитель по п. 2, содержащий два движительных агрегата, при этом первый движительный агрегат установлен на первой части подножной доски, а второй движительный агрегат установлен на второй части подножной доски, при этом каждая из частей подножной доски имеет по меньшей мере один из встроенных аккумуляторов, соединенных посредством водонепроницаемого соединения с одним из движительных агрегатов, установленных на этой части подножной доски.
17. Движитель по п. 16, в котором толщина каждой части подножной доски, содержащей встроенные аккумуляторы, меньше четырех дюймов.
18. Движитель по п. 1, дополнительно содержащий ограничитель скорости, выполненный с возможностью установки пользователем различных уровней максимальной скорости.
19. Движитель по п. 1, дополнительно содержащий ограничитель скорости, соединенный с глубиномером, при этом запрограммировано, что максимальная скорость устройства изменяться в зависимости от глубины устройства под водой.
20. Движитель по п. 1, дополнительно содержащий контейнер со сжатым газом, соединенный с резервуаром, при этом резервуар соединен с устройством и выпущенный из контейнера сжатый газ может заполнить резервуар для всплытия движителя от глубины погружения к поверхности воды.
| US 6341993 B1, 29.01.2002 | |||
| US 4938722 A, 03.07.1990 | |||
| WO 2002072382 A1, 19.09.2002 | |||
| WO 2015132478 A1, 11.09.2015 | |||
| Устройство для притирки различных деталей | 1949 |
|
SU86484A1 |

