Предлагаемое изобретение относится к техническим средствам для надевания на запястья рук для ограничения свободы действия, например, в пенитенциарной системе для эффективного контроля над заключенными.
Предлагаемое изобретение позволит обеспечить более надежный способ фиксации запорного механизма и отпирания наручников. Использование данного изобретения минимизирует риск неавторизованного отпирания наручников и позволяет контролировать положение заключенных. Это позволит также минимизировать штат сотрудников пенитенциарной системы.
Известно изобретение под названием «Наручники с двойным запорным механизмом» по патенту США №8,683,829, класс МПК Е05В 75/00, опубликовано 01.04.2014 г. (1).
Данное изобретение представляет собой наручники с повышенной стойкостью к неавторизованному открыванию запорного механизма. По замыслу автора, этого можно достичь путем увеличения количества механизмов секретности. И даже в подобных конструкциях существует практическая возможность изготовления копии ключа или «отмычки». Как правило, все подобные изделия конструируются и работают по схожему принципу и имеют тот же недостаток.
Данное изобретение США имеет ряд недостатков, а именно:
1. в случае использования в пенитенциарных системах с повышенным требованием безопасности возможен риск неавторизованного открывания наручников;
2. возможно изготовление из диэлектрических материалов спецсредств («отмычек»), не детектируемых металлодетектором и предназначенных для неавторизованного открывания наручников;
3. исключена возможность проверки внутренних состояний наручников (положения блокирующих механизмов) со стороны оператора системы;
4. исключена возможность проверки состояния силового отпирания наручников с использованием механических и иных средств;
5. исключена возможность авторизованного доступа к функциям управления наручниками для оператора или группы операторов.
Известно также изобретение «Наручники» по патенту РФ №2084608, класс МПК Е05В 75/00, опубликовано 20.07.1997 г. (2).
Сущность данного изобретения заключается в следующем: запирающий элемент выполнен в виде пластины, имеющей ступенчатый конец с тонкой и промежуточной частью и гладкий конец, размещенный под углом к защелке с возможностью продольного перемещения по пазу, выполненному в средней части защелки, и пазу, выполненному в корпусе наручника; тонкая и промежуточная части пластины взаимодействуют с пазом защелки, а гладкий конец пластины взаимодействует с пазом корпуса. На защелке выполнен выступ. При открывании наручников вначале тонкая часть пластины взаимодействует с ключом, а затем при дальнейшем повороте ключа с ним взаимодействует выступ защелки. Таким образом открывают наручники.
Данное изобретение также имеет ряд недостатков, и они полностью совпадают с вышеперечисленными недостатками наручников по патенту США №8,683,829.
Целью при разработке предлагаемого изобретения является создание конструкции наручника, позволяющего обеспечить более надежный способ фиксации запорного механизма и открывания наручника, а также минимизировать риск неавторизованного открывания наручников и обеспечивать возможность контролировать положение заключенных. Кроме этого предлагаемое техническое решение должно минимизировать штат сотрудников пенитенциарной системы.
Указанная цель и технический результат предлагаемого изобретения реализуются следующим образом.
Предлагаемые наручники, как и известные аналоги, состоящие в комплекте из двух отдельных наручников, соединенных между собой шарнирно или цепью, при этом каждый наручник содержит две боковины, между которыми неподвижно укреплен корпус, в котором размещены: дугообразный захват, соединенный одним концом шарнирно между двумя боковинами, а другим концом с возможностью взаимодействовать с защелкой, блокирующей положение дугообразного захвата в корпусе, и запирающее устройство с ключом для запирания и разблокирования дугообразного захвата в корпусе.
Но в отличие от аналогов, предлагаемое изобретение дополнительно содержит на каждом наручнике, по меньшей мере, один химический источник тока, электропривод, датчики положения блокирующего механизма и/или дугообразного захвата и электронную схему управления, снабженную беспроводным радиоинтерфейсом связи. Кроме этого электрическая схема управления содержит акселерометр.
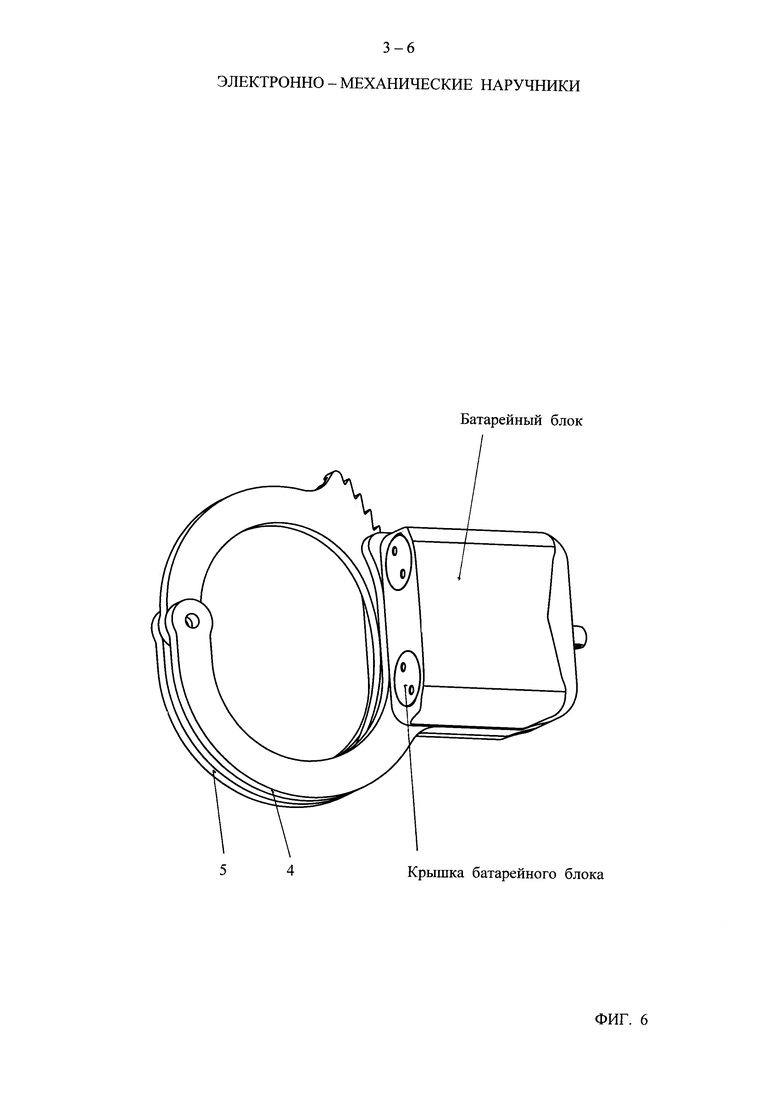
Предлагаемая конструкция отличается от аналогов также тем, что батарейный отсек, укрепленный на каждом наручнике, расположен таким образом, что съемные крышки батарейного отсека плотно прилегают к телу (запястью) лица, на которого надеты наручники.
В качестве аналога предлагаемому изобретению можно принять изобретение «Наручники с двойным запорным механизмом» по патенту США №8,683,829 (1).
Перечень фигур на чертежах.
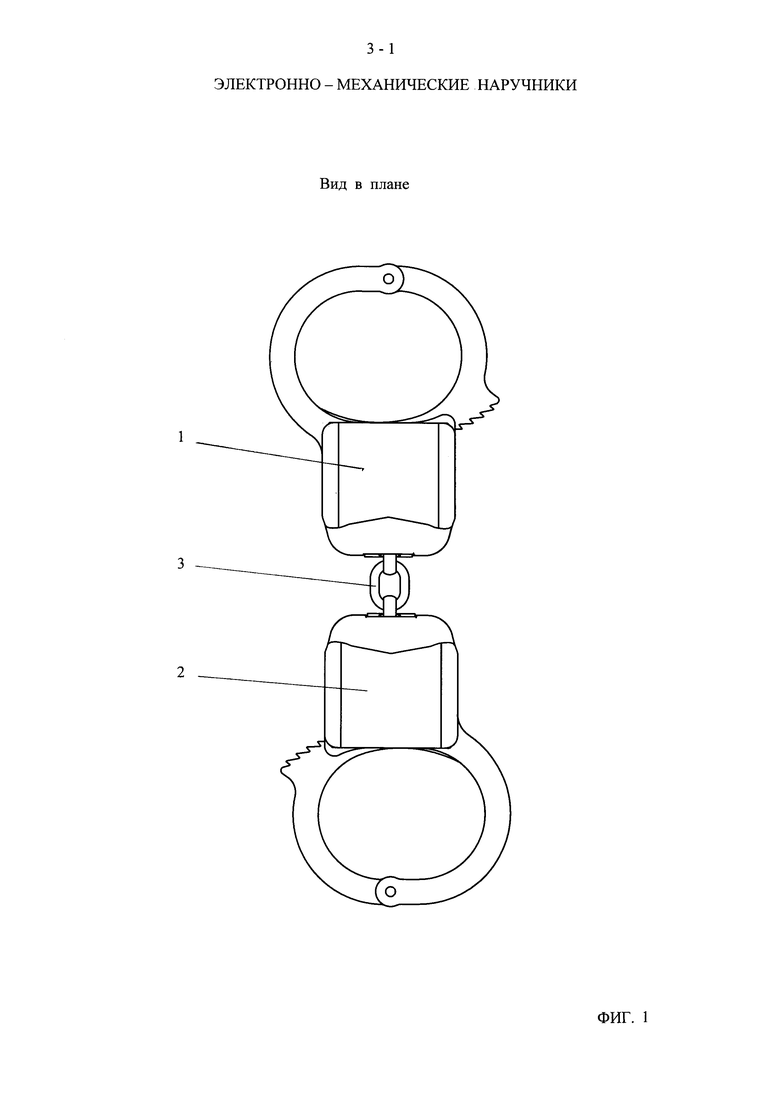
На фиг. 1 изображен внешний вид двух скрепленных между собой электронно-механических наручников, вид в плане.
На фиг. 2 - то же, вид слева по фиг. 1.
На фиг. 3 изображен электронно-механический наручник, вид в плане, со снятой одной боковиной.
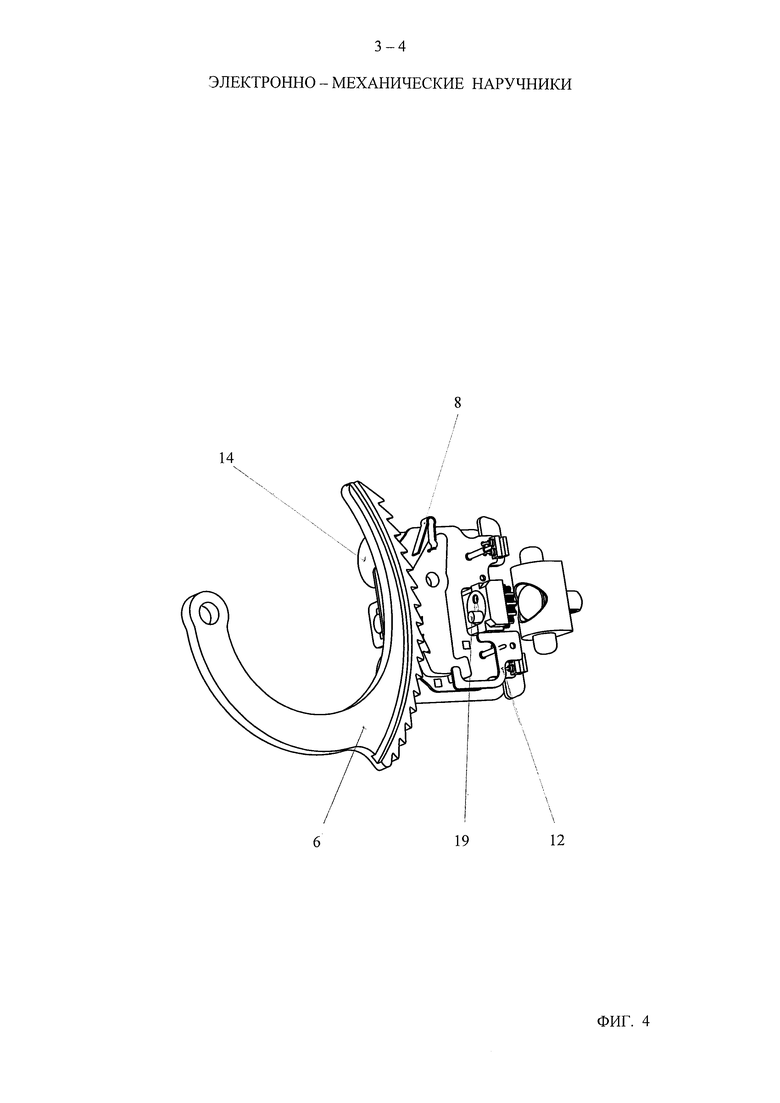
На фиг. 4 - то же, изображен дугообразный захват во взаимном положении с фиксирующим механизмом и электроприводом, с химическим источником тока, снятыми боковинами и батарейным отсеком.
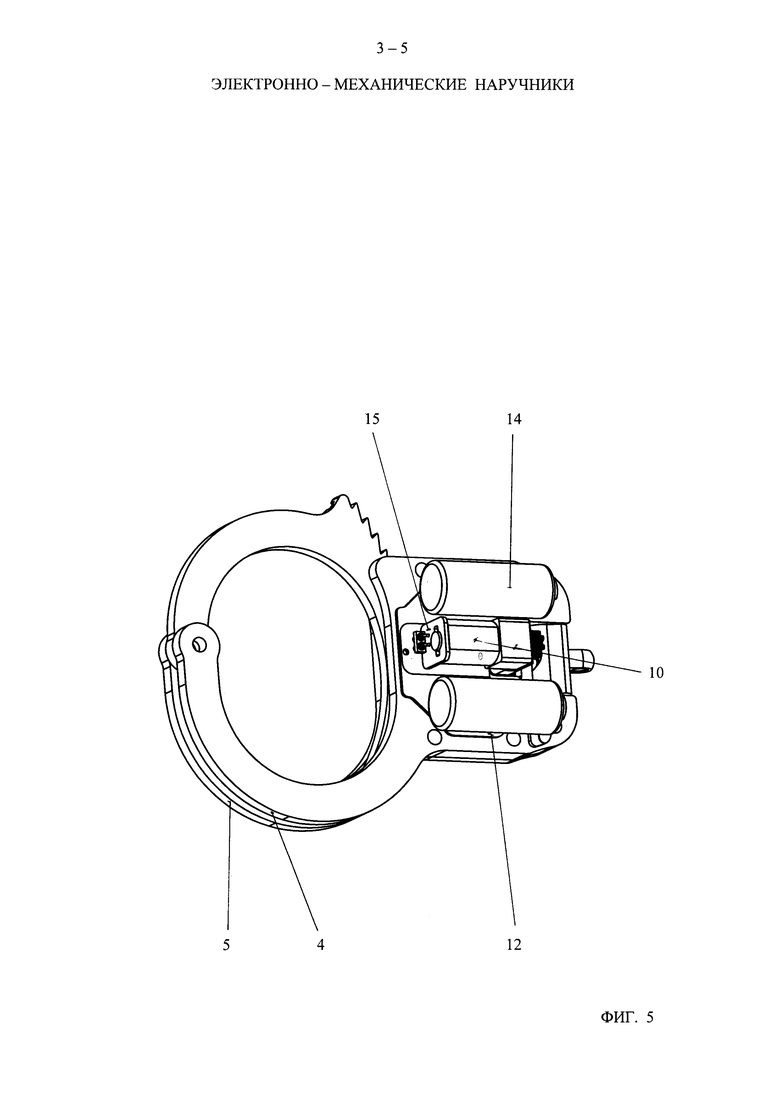
На фиг. 5 - то же, изображена боковина-корпус наручника со снятым корпусом батарейного отсека.
На фиг. 6 - то же, изображен наручник в собранном виде.
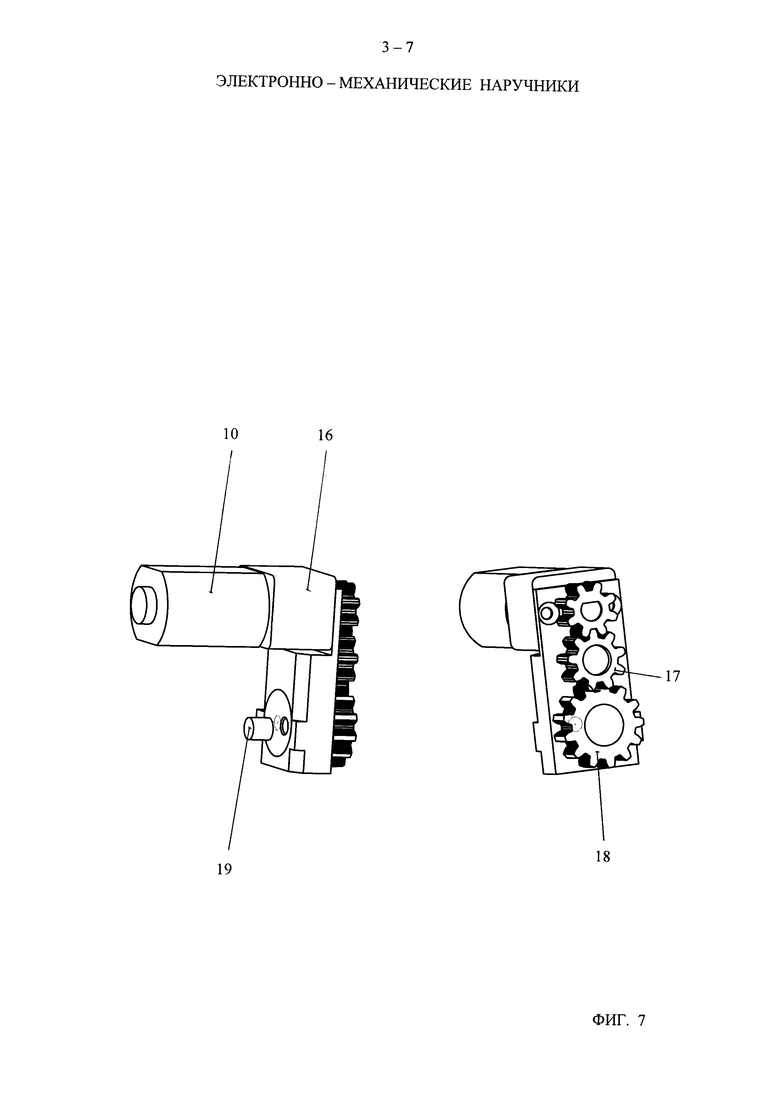
На фиг. 7 - то же, изображен электропривод с передаточным механизмом, устанавливаемый в боковину-корпус наручника, вид сбоку и анфас.
На фиг. 8 - то же, изображен поворотный шарнир, установленный в боковине-корпусе наручника, предназначенный для скрепления двух наручников шарнирно или цепью.
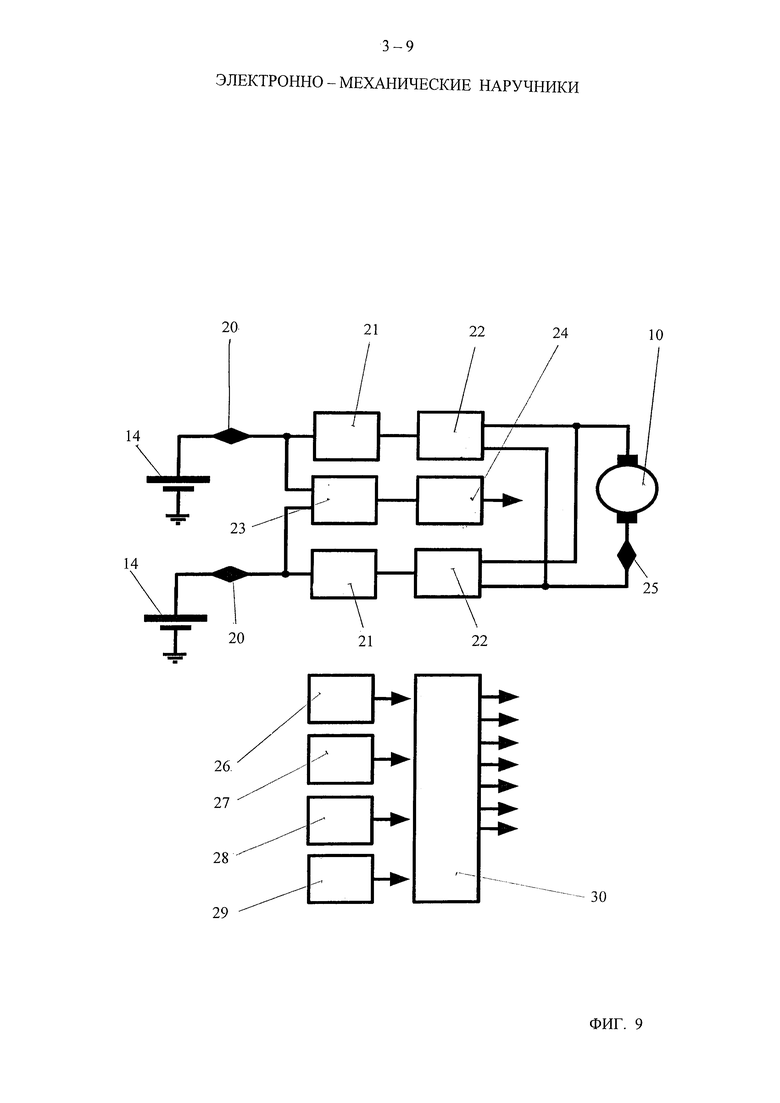
На фиг. 9 - то же, изображена структурная схема управляющего устройства наручника.
На фиг. 10 - то же, изображена плата управления, установленная на внешней поверхности боковины-корпуса и плотно прилегающая к батарейному отсеку, установленному на той же поверхности боковины-корпуса.
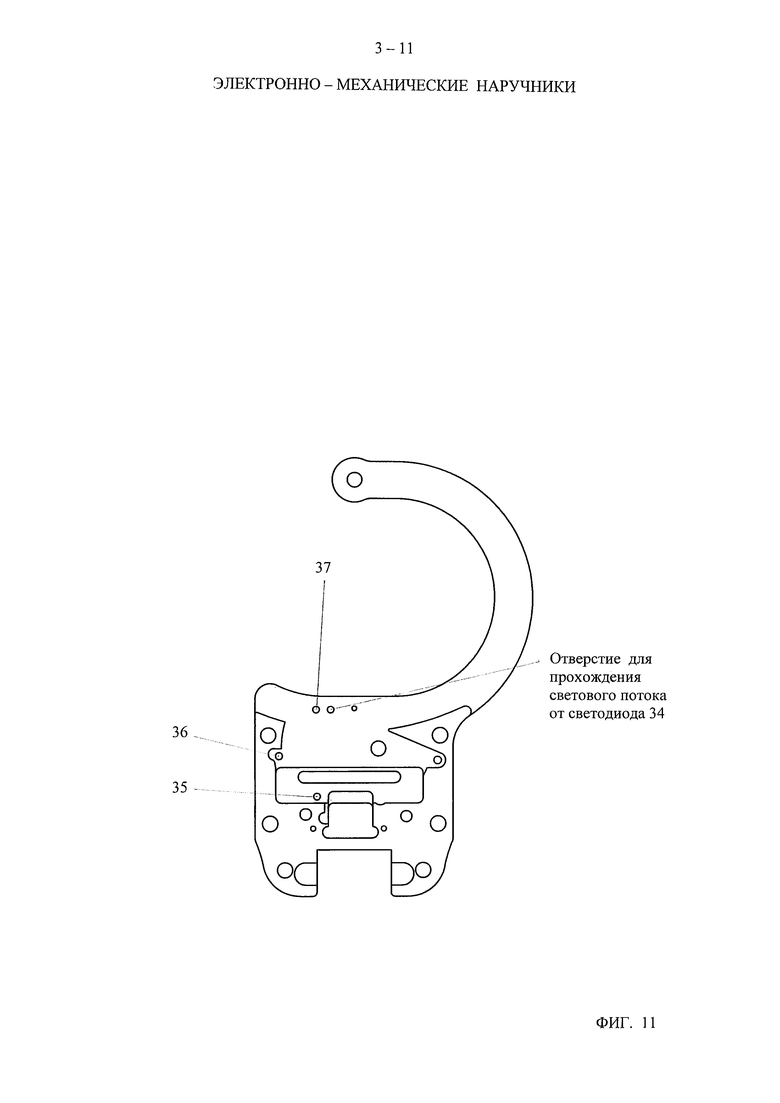
На фиг. 11 - то же, изображена схема расположения в стенке боковины-корпуса с батарейным отсеком отверстий, предназначенных для пропуска светового потока от светодиодов, установленных на печатной плате.
На фиг. 12 изображена структурная схема электронного управления и взаимодействия элементов системы управления и контроля наручников.
Предлагаемые электронно-механические наручники представляют собой комплект из двух наручников 1 и 2, скрепленных между собой шарнирно крепежным элементом, например, кольцом или цепочкой 3, на фиг. 1 и 2 изображены в плане и спереди.
На фиг. 3 изображена боковина-корпус 4 наручника, выполненная как одно целое с корпусом наручника, что позволяет увеличить размер полости и емкость боковины-корпуса 4 для размещения в ней деталей и механизмов блокирования и системы управления наручника в соответствующих углублениях и ложементах.
К боковине-корпусу 4 и второй боковине 5 (фиг. 3 и 5) шарнирно прикреплен одним своим концом дугообразный захват 6, который находится в зафиксированном положении с защелкой 7 посредством храповых зубцов, выполненных соответственно и на защелке и на дугообразном захвате. Защелка 7 установлена на оси с возможностью поворота (вращения) на этой оси и подпружинена плоской пружиной 8, что обеспечивает плотное и надежное сцепление храповых зубцов защелки с храповыми зубцами дугообразного захвата после одевания наручника на объект применения наручника.
Защелка 7 находится в постоянном контакте с ригелем 9 (фиг. 3 и 4), в котором выполнены три сквозных паза, в которые входит в постоянное зацепление эксцентриковый поводок 19, выполненный на торце вала-шестерни 18, связанной через редуктор с электродвигателем 10 (фиг. 3 и 7) и обеспечивающим перемещение ригеля 9 влево-вправо. На боковине-корпусе 4 на ее внутренней поверхности укреплена печатная плата 11 с установленными на ней светодиодами, а на наружной поверхности боковины-корпуса 4 укреплена печатная плата 12 с установленными на нее электронными компонентами и светодиодом.
На боковине-корпусе 4 установлен также поворотный в двух плоскостях шарнир с петлей 13 (фиг. 3 и 8), предназначенный для скрепления между собой двух наручников.
На фиг. 4 изображено пространственное расположение узлов и механизмов, расположенных в полости боковины-корпуса 4, при этом печатная плата 12 с укрепленными на ней электронными компонентами и датчиками установлена в ложементе на наружной поверхности боковины-корпуса 4, а на плату 12 установлены два химических источника тока 14 и закрепленным между ними электродвигателем 10 (фиг. 5), на котором укреплена кросс-плата 15.
На фиг. 6 изображен наручник, а на наружной поверхности боковины-корпуса 4 установлен корпус батарейного отсека с крышками для двух химических источников тока 14.
На фиг. 7 изображен электродвигатель 10 с редуктором 16, установленным между двумя химическими источниками тока 14 на наружной поверхности боковины-корпуса 4 (фиг. 4 и 5), через редуктор 16, промежуточную шестерню 17 и вал-шестерню 18, на торце которой выполнен эксцентрик 19.
В собранном виде через выполненное в стенке боковины-корпуса 4 окно вал-шестерня 18 с эксцентриком устанавливаются внутри боковины-корпуса 4 таким образом, что эксцентрик вала-шестерни входит в постоянное зацепление со сквозными пазами, выполненными на ригеле 9, и перемещает ригель 9 вправо или влево в зависимости, например, от радиокоманд, поступающих от оператора системы в управляющее устройство наручника на запирание или открывание наручника.
На фиг. 8 изображен поворотный в двух плоскостях шарнир 13 с петлей, при этом петля на шарнире укреплена с возможностью вращения вокруг своей продольной оси, а шарнир 13 - вокруг своей продольной оси, при этом продольные оси шарнира и петли расположены перпендикулярно друг другу, что обеспечивает свободу перемещения двух наручников в двух взаимно перпендикулярных плоскостях.
На фиг. 9 изображена структурная схема управляющего устройства наручника, которая содержит следующие комплектующие компоненты: к двум химическим источникам тока 14 подсоединены к каждому соответственно цепь контроля тока и напряжения 20, к которым подключены повышающие преобразователи 21, к которым подключены соответственно Н-мосты 22, при этом к цепям контроля тока и напряжения 21 обоих химических источников тока 14 подключены ключ выбора источника тока питания 23 для микроконтроллера с радиоинтерфейсом и иных электронных компонентов и повышающий преобразователь 24.
Оба Н-моста 22 подключены через цепь контроля тока 25 электродвигателя к электродвигателю 10. К этой же схеме управляющего устройства наручника подключены: датчик положения ригеля 26, датчик положения защелки 27, датчик положения дугообразного захвата 28 (фиг. 9 и 10), а также акселерометр 29, которые, в свою очередь, подключены к микроконтроллеру 30 с радио-интерфейсом связи.
На фиг. 10 изображена плата управления 12, установленная на внешней поверхности боковины-корпуса 4 и расположенная под батарейным отсеком. На этой плате 12 установлены вышеперечисленные датчики 26, 27, 28 положения механизмов наручника, светодиоды 33, а также два контактных разъема 32, предназначенные для подсоединения платы 12 к двум химическим источникам тока 14.
На фиг. 11 изображена схема расположения сквозных отверстий, выполненных в стенке боковины-корпуса 4, предназначенных для пропуска светового потока, исходящего от светодиодов 31 и 34, установленных на печатной плате 11, световой поток направлен на датчики 26 и 27. На датчик 28 направлен световой поток от светодиода 33, установленного на печатной плате 12. Соответствующие отверстия в стенке боковины-корпуса 4 расположены: напротив датчика 26 - отверстие 35, напротив датчика 27 - отверстие 36, напротив датчика 28 - отверстие 37.
На фиг. 12 изображена структурная схема электронного управления и взаимодействия элементов схемы контроля наручников 1 и 2, сервер 38, а также взаимодействующие с сервером операторы 39 контроля и управления, репитер R-1, например, смартфон или специализированные устройства, и репитер R-2, которые одновременно могут взаимодействовать с наручниками. Кроме этого могут быть подключены n-2 репитера, которым могут быть делегированы полномочия по управлению.
Управляющее устройство предлагаемых электронно-механических наручников состоит из следующих функциональных блоков, расположенных непосредственно в каждом наручнике: химические источники тока; повышающие преобразователи постоянного напряжения, Н-драйверы управления электродвигателя, объединенные в схему OR-ing (монтажное или), задублированные для повышения надежности всего устройства; микроконтроллер с радиоинтерфейсом связи; ключ выбора химического источника тока, выход которого подключен к преобразователю постоянного напряжения, питающего микроконтроллер; датчики положения дугообразного захвата, ригеля и защелки.
Кроме этого управляющее устройство содержит микросхему внешней памяти и микросхему акселерометра. Управляющее устройство наручников управляется сервером, который может быть вынесен за пределы географических зон пенитенциарных учреждений.
Предлагаемые электронно-механические наручники функционируют следующим образом. Для запирания каждого наручника 1 и 2 необходимо дугообразный захват 6 (фиг. 3 и 4) повернуть относительно оси соединения с боковиной-корпусом 4 и боковиной 5 в сторону корпуса наручника и, обхватив, например, запястье руки дугообразным захватом 6, ввести в зацепление храповые зубцы захвата с храповыми зубцами защелки 7, доводя до необходимого обхватывания по размеру руки. При этом один конец защелки 7 перемещается относительно оси ее установки по радиусу вниз под действием наклонных поверхностей храповых зубцов, не препятствуя движению дугообразного захвата, а плоская пружина 8 защелки плотно прижимает храповые зубцы дугообразного захвата и храповые зубцы защелки друг к другу, препятствуя обратному движению дугообразного захвата.
После окончания поворота дугообразного захвата 6 храповые зубцы защелки 7 попадают во впадины-углубления между храповыми зубцами дугообразного захвата и надежно удерживаются в таком положении (зацепленном) плоской пружиной 8. Обратному движению дугообразного захвата 6 на открывание наручника препятствует форма храповых зубцов дугообразного захвата и защелки.
При надевании наручников на заключенного в системе управляющего устройства каждого наручника сработает датчик 28 положения дугообразного захвата 6 и датчик 27 положения защелки 7, которые подают сигналы управляющему устройству на запуск дальнейших действий системы.
После определенного тайм-аута управляющее устройство наручника выдает сигнал электродвигателю 10 на перевод ригеля в положение окончательной фиксации дугообразного захвата 6 с защелкой 7, а в случае их успешной фиксации управляющее устройство наручника выдает сообщение на центральный сервер 38 (фиг. 12) через репитер R-1, например, о фиксации механизмов наручника, но не ограничиваясь ими.
Рассмотрим пример фиксации механизмов наручника. На плате 11 (фиг. 3) установлены два светодиода 31 и 34, световой поток которых через сквозные отверстия 35 и 36, выполненные в стенке боковины-корпуса 4, направлен соответственно на датчик 27 положения защелки 7 и на датчик 26 положения ригеля 9, которые установлены на плате управления 12.
На ригеле 9 выполнены три сквозных паза и при перемещении ригеля 9 вправо-влево датчик 26 положения ригеля перекрывается выступами между пазами ригеля и блокируется (перекрывается) световой поток от светодиода 31, установленного на плате 11. Информация о наличии или отсутствии светового потока детектируется датчиком 26 положения ригеля и обрабатывается микроконтроллером 30 (фиг. 9, 10, 11).
Датчик 27 положения защелки 7 работает аналогичным образом, а именно: световой поток от светодиода 34 попадает на него в двух случаях:
1. ригель 9 находится в крайнем правом положении (фиг. 3), при этом ригель 9 отжимает несколько вверх подпружиненный плоской пружиной 8 конец защелки 7, а другой конец защелки 7 опускается вниз и открывает отверстие 36 (фиг. 11) в боковине-корпусе 4 для прохождения светового потока от светодиода, установленного на плате 11;
2. при перемещении дугообразного захвата 6 при надевании наручника на руку храповые зубцы дугообразного захвата давят на храповые зубцы защелки 7 и тем самым перемещают левый конец защелки вниз, и открывается канал светового потока (отверстие 37) к датчику 27 положения защелки. Этот режим управления используется при детектировании состояния надевания наручника на руку заключенного.
Датчик 28 положения дугообразного захвата 6 работает на эффекте отражения светового потока, а именно: при условии перекрытия отверстия 37 в боковине-корпусе 4 дугообразным захватом световой поток от светодиода 33 не будет отражаться в достаточной мере. При выведении дугообразного захвата из этой зоны световой поток от светодиода 33 будет отражаться от внутренней поверхности второй боковины 5 и детектироваться датчиком 28 положения дугообразного захвата 6; этот датчик предназначен для детектирования наличия дугообразного захвата в области сцепления его с защелкой 7. Ригель 9 в комплексе и взаимодействии с защелкой 7 составляют запорный механизм наручника.
Для отпирания наручников на управляющее устройство наручника должно поступить сообщение. В случае поступления сообщения персонал, который должен произвести отпирание наручников, нажимает на кнопку на репитере R-1 или R-2, и после этого запускается процедура проверки подлинности сообщения управляющим устройством.
В случае удачной проверки разрешения из центра управления включается электродвигатель 10, который через промежуточную шестерню 17 (фиг. 7) и вал-шестерню 18 при помощи эксцентрикового поводка 19, выполненного на торце вала-шестерни 18, перемещает ригель 9 вправо. Двигаясь вправо, ригель «проезжает» выступающий книзу правый конец защелки 7 и, приближаясь к крайнему правому положению, давит (нажимает) на подпружиненный рычаг защелки 7.
Под воздействием этой силы второй конец защелки 7 опускается вниз и выходит из зацепления своими храповыми зубцами из храповых зубцов дугообразного захвата 6. После того как дугообразный захват покидает паз наручника и может свободно перемещаться относительно оси своего вращения, датчик 28 положения дугообразного захвата подает информацию управляющему устройству о выходе захвата из паза наручника, при этом управляющее устройство подает команду электродвигателю 10 на вращение влево и перевод ригеля влево в исходное положение «трещетки».
Таким образом, наручники готовы к новому циклу использования, то есть надевания дугообразного захвата, например, на запястье заключенного.
В предлагаемом изобретении система отпирания наручников построена на криптографической системе цифровой подписи. Каждый из участников системы контроля наручников имеет пару ключей - закрытый и открытый. Управляющее устройство каждого наручника имеет список доверенных открытых ключей, записанных в памяти при вводе наручников в эксплуатацию и в процессе работы. Сервер системы имеет инфраструктуру хранения и распределения открытых ключей каждого из участников системы контроля наручников.
Достоинством данного метода распределения ключей является минимальная вероятность неавторизованного открывания наручников по сравнению с традиционными методами. Общая задача сводится к делегированию полномочий и распределению ответственности между персоналом и оператором(ами) при отпирании-запирании наручников. В данном решении персона, которая подтверждает действие отпирания наручников, может находиться в любой географической точке расположения, при условии наличия связи с сервером.
Персона, которая должна снять наручники, принимает «половину» решения, и эта персона не является носителем закрытого ключа, а вторая персона-оператор терминала (фиг. 12) - дает окончательное решение об отпирании и снятии наручников с заключенного (авторизации).
Рассмотрим примерный сценарий при работе в пенитенциарной системе в режиме обеспечения максимальной безопасности.
Допустим, необходимо перевести заключенного из точки А в точку Б. Для этого работник пенитенциарного учреждения А надевает наручники на заключенного. При этом наручники приходят в состояние фиксации запорного механизма и посылают радиосигнал репитеру, далее репитер пересылает эту посылку на центральный сервер, а также подает звуковой сигнал.
Возможны два режима работы системы управления наручниками:
1. режим работы с отложенными разрешениями;
2. интерактивный режим работы.
Режим работы с отложенными разрешениями заключается в следующем: авторизованный оператор создает разрешения на отпирание-запирание наручников к конкретному наручнику или их группе, к конкретному репитеру или их группе. Дополнительными ограничениями могут быть: время совершаемого действия, географические координаты и т.д. Созданное разрешение подписывается закрытым ключом оператора и отдается на проверку и подпись серверу. В свою очередь, сервер проверяет целостность, совместимость, легитимность, валидность разрешения и его цифровой подписи оператором, а также полномочия и легитимность оператора.
В случае успеха проверок сервер подписывает данное разрешение своим закрытым ключом, открытый ключ для которого является доверенным для указанного наручника. Далее подписанное разрешение отправляется на репитер, где в свою очередь может быть использовано для указанного наручника.
Особенностью режима работы с отложенными разрешениями является то, что разрешение может быть выдано заранее, а также не требуется постоянная связь оператора с репитерами, то есть подписанные разрешения могут быть выданы во время наличия связи.
Возможна привязка номера заключенного к номеру наручников также через репитер с посылкой сигнала на центральный сервер через репитер для индивидуального контроля заключенных. Когда заключенный будет доставлен в точку Б, для снятия наручников должна быть выполнена следующая процедура: работник пенитенциарного учреждения Б нажимает кнопку на репитере и просит подтвердить по дополнительному каналу связи о том, что все безопасно. Оператор системы получает два запроса: один - на терминале от центрального сервера, другой - по дополнительному каналу связи, и принимает решение о снятии наручников. Оператор на терминале нажимает соответствующую клавишу, тем самым он подтверждает запрос на снятие наручников, и у заключенного отпираются (открываются) наручники.
Возможно использование координат системы GPS/Глонасс (или других систем геолокации) в репитерах для контроля зон снятия наручников для исключения ошибок персонала.
Возможно дублирование дополнительного канала связи видеоканалом связи между точкой Б и удаленным местом работы оператора системы с целью предотвращения зон компрометации снятия наручников.
Таким образом, риск неавторизованного открывания наручников будет снижен до минимальных значений, и у персонала пенитенциарных учреждений не будет фактически физических ключей от наручников, которые могут быть утеряны; хранилище приватных электронных ключей производится на центральном сервере, и к которым нет доступа персонала учреждения. Действие персонала при снятии наручников может быть сведено к следующей схеме: послал запрос на снятие, подтвердил запрос на снятие, непосредственное снятие наручников.
При необходимости снятия наручников любой работник пенитенциарного учреждения Б, на репитер которого пришло разрешение на открытие наручников, может нажать кнопку на своем устройстве.
Особенностью интерактивного режима работы в отличие от режима работы с отложенными разрешениями является получение подписанного разрешения репитером непосредственно перед осуществляемым действием, как-то отпирание-закрытие наручников и т.д., а также передачи подтверждения о выполнении ограничений и его проверки оператором, но не ограничиваясь этим.
Возможно также создание конфигураций системы управления разрешениями и без использования сервера. Роль сервера будет совмещена с репитером R-1. Для этого при первом подключении наручников к репитеру R-1 на репитере и на наручниках вырабатываются открытые и закрытые ключи. При этом управление наручниками будет производиться репитером R-1. При необходимости делегировать полномочия, например, репитеру R-2, пользователь репитера R-1 собирает пакет, в котором содержатся разрешаемые действия для репитера R-2 в определенном окне (окнах) времени, закрытый ключ репитера R-2 и подписывает своим ключом, а также добавляет открытый ключ репитера R-2 в список доверенных. Далее этот пакет данных отправляется и доставляется репитеру R-2. Репитер R-2 сохраняет его у себя в памяти.
При необходимости отпирания наручников репитером R-2 пользователь нажимает кнопку отпирания, в результате чего репитером R-1 посылается наручникам информация, содержащая разрешаемые действия для репитера R-2, подписанная ключом наручников. Управляющее устройство наручника проверяет свою подпись, при совпадении которой производится генерация пары закрытого ключа для наручников и репитера R-2.
Акселерометр, используемый в системе управления наручников, предназначен для дополнительного контроля состояния наручников, а также для выработки энтропии в генераторе псевдослучайных чисел. При помощи акселерометра возможен контроль следующих состояний наручников:
1. ходьба заключенного;
2. бег заключенного;
3. удар по наручникам;
4. прыжок заключенного;
5. механическое вскрытие корпуса наручника;
6. режим езды (транспортирования) заключенного;
7. режим выключенного состояния (бездействия).
Все эти состояния записываются, например, в широковещательный радиопакет (для Bluetooth® LOW/ Energy® Bluetooth® Smart® радиоинтерфейса), который повторяется через определенные промежутки времени с выдачей их в радиоэфир и принимается репитерами, которые могут сами контролировать состояние наручников и, например, выдавать сигналы предупреждения, а также пересылать сообщения об этих состояниях на сервер с целью принятия решения оператором терминала.
Также возможен контроль с использованием акселерометра «заеданий» ригеля, а также режима «надевания» наручников, в результате которого образуется характерный треск, который улавливает одна из осей акселерометра. Обработка этих сообщений производится внутренним сигнальным процессором акселерометра, а также микроконтроллером, который периодически считывает ускорения с акселерометра и производит цифровую обработку сигналов.
При использовании в помещениях дополнительных репитеров возможен контроль перемещений заключенных за счет считывания уровня сигнала RSSI и его анализа.
Управляющее устройство наручников вмонтировано непосредственно в каждый наручник и управляется извне персоналом пенитенциарного учреждения по радиосвязи и информационным каналам и системам.
Предлагаемая конструкция электронно-механических наручников принципиально отличается от известных наручников, максимально защищает наручники от неавторизованного открывания, минимизирует риск человеческого фактора в использовании наручников, а также позволяет создавать принципиально новую систему защиты, безопасности и содержания заключенных в пенитенциарных учреждениях.
Источники информации
1. «Наручники с двойным запорным механизмом» по патенту США №8,683,829, класс МПК Е05В 75/00, опубликовано 01.04.2014 г.
2. «Наручники» по патенту РФ №2084608, класс МПК Е05В 75/00, опубликовано 20.07.1997 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАРУЧНИКИ | 1990 |
|
RU2024720C1 |
| Система контроля доступа к механизмам с приводом на промышленном предприятии на основе технологии LoRa, обеспечиваемого посредством идентификационных карт | 2021 |
|
RU2813200C2 |
| НАРУЧНИКИ | 1992 |
|
RU2005871C1 |
| НАРУЧНИКИ | 1993 |
|
RU2084608C1 |
| ДАТЧИК-ИЗМЕРИТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 2002 |
|
RU2239804C2 |
| СИСТЕМА УПРАВЛЕНИЯ БАЛАНСИРОВОЧНЫМ СТАНКОМ НА БАЗЕ КЛИЕНТ-СЕРВЕРНОЙ АРХИТЕКТУРЫ | 2007 |
|
RU2331052C1 |
| ШИНОМОНТАЖНЫЙ СТАНОК | 2002 |
|
RU2239570C2 |
| ВУЛКАНИЗАТОР ДЛЯ РЕМОНТА МЕСТНЫХ ПОВРЕЖДЕНИЙ ПНЕВМАТИЧЕСКИХ ШИН ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2196681C1 |
| ВУЛКАНИЗАТОР ДЛЯ РЕМОНТА МЕСТНЫХ ПОВРЕЖДЕНИЙ ПНЕВМАТИЧЕСКИХ ШИН ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2154576C1 |
| ПЕДАЛЬ ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ ПРИВОДА | 2002 |
|
RU2225994C1 |




Предлагаемое изобретение относится к техническим средствам для надевания на запястья рук для ограничения свободы действия, например, в пенитенциарной системе для эффективного контроля над заключенными. Предлагаемое изобретение позволит обеспечить более надежный способ фиксации запорного механизма и отпирания наручников. Использование данного изобретения минимизирует риск неавторизованного отпирания наручников и позволяет контролировать положение заключенных. Это позволит также минимизировать штат сотрудников пенитенциарной системы. Предлагаемые наручники, как и известные аналоги, состоящие в комплекте из двух отдельных наручников, соединенных между собой шарнирно или цепью, при этом каждый наручник содержит две боковины, между которыми неподвижно укреплен корпус, в котором размещены: дугообразный захват, соединенный одним концом шарнирно между двумя боковинами, а другим концом с возможностью взаимодействовать с защелкой, блокирующей положение дугообразного захвата в корпусе и запирающее устройство с ключом для запирания и разблокирования дугообразного захвата в корпусе. Но в отличие от аналогов предлагаемое изобретение дополнительно содержит на каждом наручнике, по меньшей мере, один химический источник тока, электропривод, датчики положения блокирующего механизма и/или дугообразного захвата и электронную схему управления, снабженную беспроводным радиоинтерфейсом связи. Кроме этого электрическая схема управления содержит акселерометр. Предлагаемая конструкция отличается от аналогов также тем, что батарейный отсек, укрепленный на каждом наручнике, расположен таким образом, что съемные крышки батарейного отсека плотно прилегают к телу (запястью) лица, на которого надеты наручники. Предлагаемая конструкция электронно-механических наручников принципиально отличается от известных наручников, максимально защищает наручники от неавторизованного открывания, минимизирует риск человеческого фактора в использовании наручников, а также позволяет создавать принципиально новую систему защиты, безопасности и содержания заключенных в пенитенциарных учреждениях. 3 з.п. ф-лы, 12 ил.
1. Электронно-механические наручники, составляющие комплект из двух наручников, скрепленных между собой шарнирно или цепью, при этом каждый наручник содержит две боковины, а между ними укреплен корпус, в котором размещены: дугообразный захват, соединенный одним концом шарнирно между двумя концами боковин, а другим концом с возможностью взаимодействия - с защелкой, блокирующей положение дугообразного захвата в корпусе наручника; запирающее устройство с ключом для запирания и разблокирования дугообразного захвата в корпусе, отличающиеся тем, что дополнительно содержат на каждом наручнике, по меньшей мере, один химический источник тока, электропривод, датчики положения блокирующего механизма и/или дугообразного захвата и электронную схему управления, снабженную беспроводным радиоинтерфейсом связи.
2. Электронно-механические наручники по п. 1, отличающиеся тем, что система управления разрешениями на различные действия с наручниками содержит репитеры и сервер, выдающие разрешения на управление наручниками, в том числе на их запирание и отпирание.
3. Электронно-механические наручники по пп. 1 и 2, отличающиеся тем, что электронная схема управления наручников содержит акселерометр и с его помощью анализирует состояние системы управления, и собирает эту информацию в широковещательный пакет с выдачей его в радиоэфир через определенные промежутки времени.
4. Электронно-механические наручники по п. 1, отличающиеся тем, что батарейный отсек, установленный на каждом наручнике, расположен таким образом, что съемные крышки батарейного отсека плотно прилегают к телу лица, на которого надеты наручники.
| CN 104100153 A, 15.10.2014 | |||
| US 4128867 A1, 13.02.1979 | |||
| CN 104100154 A, 15.10.2014 | |||
| CN 203570037 U, 30.04.2014 | |||
| CN 202117445 A, 18.01.2012. |

