Изобретение относится к устройствам управления механизмами электропривода при работе с ножными педалями и может быть использовано в различных отраслях промышленности, в том числе в машино- и приборостроении для обеспечения безопасного управления различными станками и оборудованием.
Известно “Устройство для управления механизмом привода” по описанию изобретения к патенту СССР №1836674, класс МПК G 05 G 1/14, опубликовано в БИ №31 23.08.93 г. (1).
Данное устройство содержит основание, с которым связана педаль, установленная с возможностью ограниченного поворота вокруг горизонтальной оси, смонтированной у одного из концов педали, возвратной пружины для поддержания педали под углом к основанию и смонтированный под педалью концевой выключатель. Над педалью в передней ее части укреплен защитный кожух, который закрывает сверху выключатель и половину педали и тем самым защищает от случайного нажатия на педаль оператором.
Недостатком данного устройства является то, что или по ошибке оператора или при случайном падении на педаль какого-нибудь тяжелого предмета может произойти несанкционированное нажатие педалью на выключатель и затем включение механизма привода. А это может привести к травме оператора или поломке технологической оснастки или повреждению изготавливаемой детали.
Целью предлагаемого изобретения является создание конструкции педали, в которой были бы исключены случайные и несанкционированные нажатия на педаль, а также существенное повышение надежности работы педали.
Технический результат в предлагаемой “Педали для управления механизмом привода” достигается следующим образом.
Предлагаемое устройство содержит корпус педали, на котором укреплен одно- или многопозиционный датчик нажатия и установленная на горизонтальной оси над датчиком нажатия подпружиненная снизу верхняя поворотная часть педали, предназначенная для воздействия на датчик нажатия.
А отличается от известного тем, что дополнительно содержит электронное устройство управления, а также соединенные с устройством управления и укрепленные на верхней поворотной части педали один или два датчика близости, а в корпусе педали - датчик перемещений (поворота) положений верхней поворотной части педали, обеспечивающие во взаимодействии и при повороте верхней поворотной части педали вокруг горизонтальной оси выдачу разрешающего сигнала в устройство управления для последующей выдачи из последнего сигнала в канал связи с механизмом привода или внешним устройством лишь при нажатии правильно поставленной ступней оператора на верхнюю поворотную часть педали.
Для управления механизмом привода при выполнении особо ответственных операций устройство управления дополнительно содержит микроконтроллер со встроенной в него программой, обеспечивающей выдачу разрешающего сигнала в канал связи с внешним устройством лишь после повторного нажатия ступней оператора на верхнюю поворотную часть педали.
В качестве отдаленного аналога предлагаемой педали можно принять “Устройство для управления механизмом привода” по патенту СССР №1836674 (1).
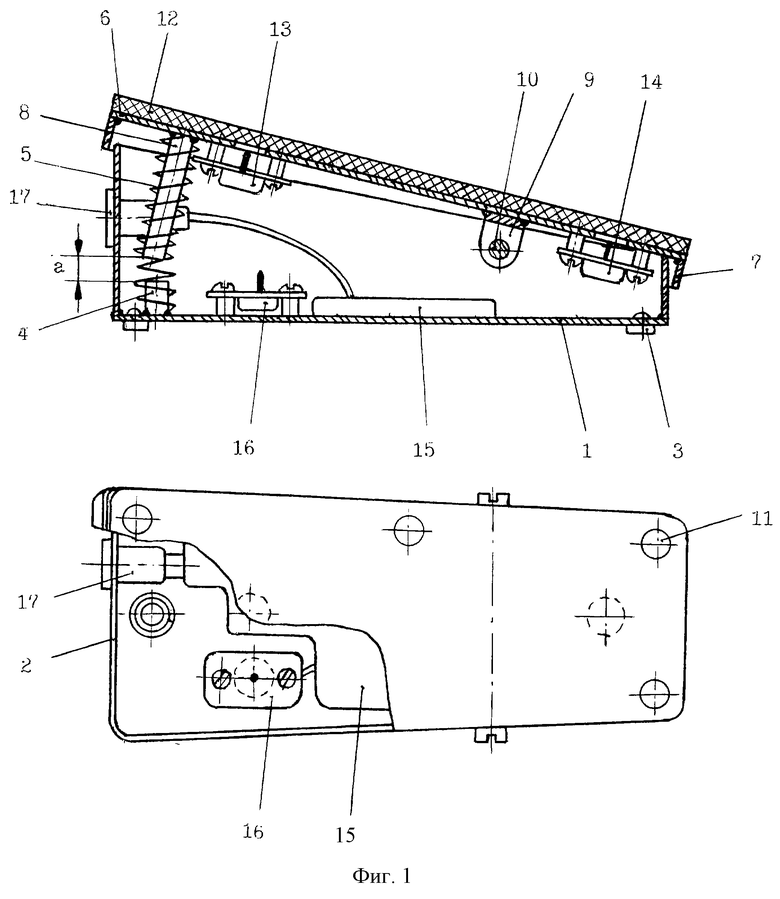
На фиг.1 изображена конструкция предлагаемой “Педали для управления механизмом привода”, вид сбоку в разрезе и вид сверху с частичным вырезом.
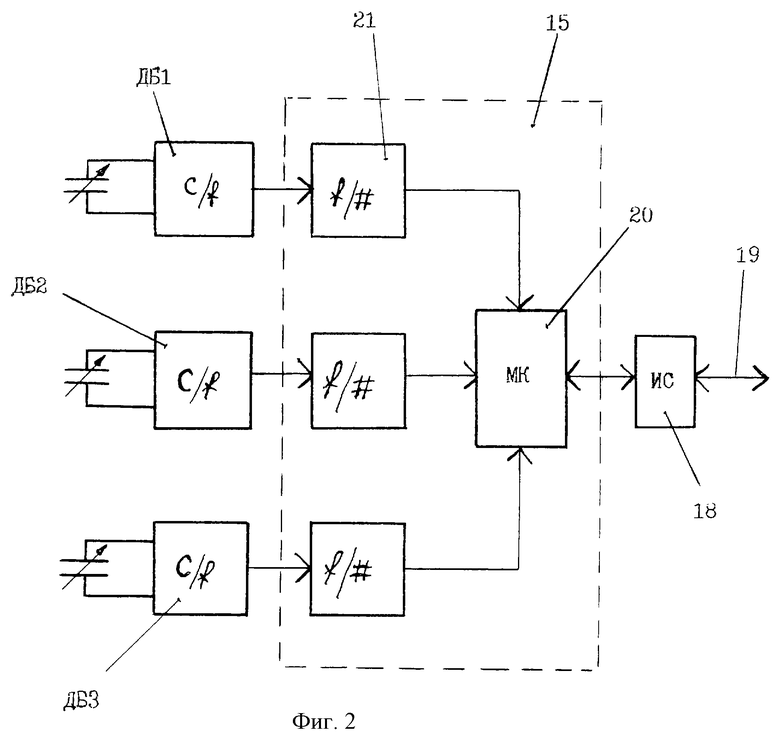
На фиг.2 изображена функциональная схема устройства управления педалью.
Предлагаемая “Педаль для управления механизмом привода” состоит из следующих деталей, а также электронных блоков и узлов.
Корпус педали представляет собой жесткую и прочную коробчатую конструкцию и состоит из сваренных из листовой стали днища 1 и приваренной по всему периметру днища стенки 2 (фиг.1). В днище 1 укреплены четыре резиновые эластичные опоры 3, расположенные в четырех углах днища. В днище с внутренней стороны приварен также стальной штырек 4, предназначенный для установки на него пружины 5, а также выполняет роль ограничителя хода верхней поворотной части педали 6.
К основанию верхней поворотной части 6 педали для жесткости и прочности по всему ее периметру приварена стенка 7, которая одновременно является щитком, предотвращающим попадание мусора и других предметов в полость корпуса педали. К основанию верхней поворотной части 6 педали с внутренней стороны (в его рабочем положении) приварен стальной штырек 8, на который установлена пружина сжатия 5 и который является ограничителем угла поворота на величину “а” при рабочих перемещениях верхней поворотной части 6 педали. К верхней поворотной части 6 с внутренней стороны приварена скоба 9 с двумя проушинами, а в отверстия в этих проушинах и в стенке 2 продета и укреплена ось 10, вокруг которой перемещается на небольшой угол верхняя поворотная часть 6 педали.
На верхнюю рабочую поверхность поворотной части 6 педали на шести заклепках 11 прикреплена резиновая подкладка 12 для опоры не нее ступни оператора.
В основании поворотной части 6 в передней ее части, где располагается примерно носок ступни оператора, выполнено сквозное отверстие, концентрично которому с внутренней стороны основания 6 прикреплен датчик близости 13 (ДБ1), а примерно в области расположения пятки ступни оператора также выполнено еще одно сквозное отверстие, концентрично которому укреплен еще один датчик близости 14 (ДБ2), а отверстия выполнены для того, чтобы антенны датчиков близости ДБ1 и ДБ2 не были экранированы стальной стенкой основания 6, а резиновая подкладка 12 одновременно предохраняет эти антенны от механических повреждений.
В полости корпуса на днище 1 укреплено устройство управления 15, рядом с которым укреплен датчик перемещения (поворота) верхней поворотной части 6 педали 16 (ДБ3), соединенный с устройством управления 15. Датчик перемещений 16 выполняет роль, аналогичную датчику нажатия. Датчики близости 13 (ДБ1) и 14 (ДБ2) также соединены с устройством управления 15.
Устройство управления 15 по интерфейсному кабелю и через интерфейсный разъем 17, укрепленный в передней стенке 2 корпуса педали, соединяется с интерфейсом связи 18, который соединен с каналом связи 19 с механизмом привода или внешним устройством, например, компьютером (фиг.1 и 2). Устройство управления 15 (фиг.2) содержит микроконтроллер 20 (МК), к которому подсоединены три преобразователя 21, преобразующие частоту в информационный код. К каждому преобразователю 21 подсоединены соответственно датчики близости ДБ1, ДБ2 и датчик перемещений ДБ3, преобразующие емкость в частоту.
Микроконтроллер 20 через интерфейс связи 18 (ИС) соединен с каналом связи 19 с внешним устройством.
Предлагаемая “Педаль для управления механизмом привода” работает следующим образом.
Педаль может функционировать только при правильно поставленной ступне оператора на верхнюю поворотную часть педали.
При нажатии ступней на верхнюю поворотную часть 6 педали она перемещается (поворачивается) на определенный угол на величину “а” до упора штырьком 8 в штырек 4.
Датчики близости 13 (ДБ1) и 14 (ДБ2), укрепленные с нижней поверхности поворотной части 6 педали, а также датчик перемещений 16 (ДБЗ), укрепленный в днище 1 корпуса педали выполнены по схеме индуктивной трехточки.
Теоретически датчик близости может быть реализован также и на других принципах, например, микроволновом, ультразвуковом, на базе ИК-волн, изменении электрического дипольного момента, изменении индуктивности контуров и т.п. Данные датчики близости генерируют частоту, при этом частота определяется емкостью антенного контура, так как любые предметы, в том числе и ступня ноги оператора изменяет эквивалентную емкость контура индуктивной трехточки, то есть изменяет и частоту электрических колебаний контура.
Частота, снимаемая с генератора индуктивной трехточки поступает на преобразователи 21, преобразующие частоту в информационный код, которые с определенным периодом времени от 0,05 до 0,5 с преобразуют эту информацию к определенному виду, которая затем поступает на микроконтроллер 20. Микроконтроллер 20 анализирует эту информацию в соответствии с определенным алгоритмом и выдает команды через интерфейс связи 18 в канал связи 19 с внешним устройством.
Электронная схема педали работает следующим образом.
Оператор устанавливает ступню на верхнюю поворотную часть 6 педали, при этом пока он не производит нажатия на поворотную часть 6. Так как ступня имеет определенную емкость, то эта емкость изменяет емкость контуров датчиков близости ДБ1 и ДБ2. установленных соответственно на поворотной части 6 под носком и пяткой ступни оператора и датчика перемещений ДБ3, укрепленного в корпусе педали. При этом микроконтроллер анализирует эту информацию и подбирает (ищет) минимальное значение функции кода от датчиков близости ДБ1 и ДБ2.
Далее оператор ступней поворачивает (перемещает) и прижимает поворотную часть 6 педали вперед в крайнее положение, пока штырек 8 не упрется в штырек 4. При этом изменяется емкость контура датчика перемещений ДБ3 и значение кода с ДБ3 будет уменьшаться. После прохождения определенного порога с датчика ДБ3 микроконтроллер рассчитывает допуск верхнего порога минимального значения ДБ1 и ДБ2 (например, плюс 20% допуск на срабатывание). Данные значения порога являются реперными точками, поэтому код от датчиков ДБ1 и ДБ2 не приведет к выдаче управляющего (разрешающего) сигнала в интерфейс связи.
После прохождения определенного порога датчиком перемещений ДБ3 и при условии, что информация с датчиков близости ДБ1 и ДБ2 соответствует допуску на срабатывание, микроконтроллер выдает сигнал управления в канал связи 19 с внешним устройством, например, с электропневмоклапаном соединения муфты с маховиком гильотинных ножниц.
После срабатывания сигнала управления оператор отводит поворотную часть 6 педали в исходное положение. При этом код с датчика перемещений ДБ3 будет увеличиваться и после прохождения определенного порога срабатывания микроконтроллер подаст определенный сигнал в канал связи 19 о том, что поворотная часть 6 педали возвратилась в исходное положение. И после этого микроконтроллер готов к определению последующего нажатия на педаль.
В случае, если оператор снимет ступню с педали или даже часть ступни немного сместит на педали, то микроконтроллер по значениям показателей датчиков близости ДБ1 и ДБ2 определяет этот изменившийся режим и выдает соответствующую запрещающую информацию в канал связи 19 с внешним устройством. При этом микроконтроллер блокирует следующее срабатывание педали (при неправильно установленной ступне оператора на педаль).
Для начального запуска в работу предлагаемой педали необходимо полностью убрать ступню с поворотной части 6 педали, а затем вновь поставить ступню в правильное положение, и педаль готова к работе.
Возможно построение систем управления педалью с большим или меньшим количеством датчиков близости в одной педали, например, с одним или тремя датчиками близости, укрепленными в поворотной части 6 педали.
Возможно также построение систем с использованием аналоговой схемотехники.
В случае использования предлагаемой педали в управлении особо ответственными или опасными технологическими процессами алгоритм функционирования педали может быть изменен к следующему виду.
Оператор производит пробное (калибровочное) нажатие на педаль и ее отпускание. И лишь при повторном нажатии на педаль микроконтроллер выдаст разрешающий сигнал (команду) в канал связи 19 с внешним устройством. Например, на свободную от ступни оператора педаль упал тяжелый металлический лист, и педаль сработала, то есть поворотная часть 6 повернулась вперед до упора, но при этом в канал связи 19 сигнал (команда) не поступит. Команда поступит лишь после повторного нажатия на педаль правильно установленной ступней оператора.
Таким образом, конструкция предлагаемой педали для управления механизмом привода выполнена с использованием информационной технологии и представляет собой новое значительно усовершенствованное поколение педали.
Предлагаемая конструкция педали изготовлена и опробована в сентябре 2002 г. в г. Омске и показала положительные результаты в работе.
Литература:
1. “Устройство для управления механизмом привода” по описанию изобретения к патенту СССР №1836674, класс МПК G 05 G 1/14, опубликовано в БИ №31 23.08.93 г.
Изобретение относится к устройствам управления механизмом электропривода при работе с ножными педалями и может быть использовано в различных отраслях промышленности, в том числе в машино- и приборостроении для обеспечения безопасного управления различными станками и оборудованием. Предлагаемая педаль содержит корпус, на котором укреплен одно- или многопозиционный датчик нажатия, над которым установлена на горизонтальной оси подпружиненная снизу верхняя поворотная часть педали, предназначенная для воздействия на датчик нажатия. Дополнительно педаль содержит электронное устройство управления, а также соединенные с устройством управления один или два датчика близости. В корпусе педали установлен датчик перемещений (поворота) положений верхней поворотной части педали. При повороте верхней поворотной части педали вокруг горизонтальной оси обеспечивается выдача разрешающего сигнала в устройство управления для последующей выдачи из последнего сигнала в канал связи с механизмом привода или внешним устройством лишь при нажатии правильно поставленной ступней оператора на верхнюю поворотную часть педали. Технический результат – исключение несанкционированных нажатий на педаль и повышение надежности работы. 1 з.п.ф-лы, 2 ил.
| Устройство для управления механизмом привода | 1990 |
|
SU1836674A3 |
| Устройство для управления приводом | 1979 |
|
SU860038A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| US 3563111 A, 16.02.1971. | |||

