Изобретение относится к области шинной промышленности и может быть использовано в отрасли шиноремонтного производства, а также в машиностроении, станкостроении и других, где необходимо получать корректную информацию о ходе технологических процессов.
Известен шиномонтажный станок итальянской компании SICAM марки "FALCO 1200 COMBINED", опубликовано в рекламном проспекте эксклюзивного дистрибьютера SICAM в России компании "ЕВРОСИВ", адрес в Интернете www.eurosiv.ru.
Данный шиномонтажный станок "FALCO 1200 COMBINED" с гидравлической системой работы всех узлов и механизмов, снабженный также электронным устройством управления, на сегодняшний день является наиболее совершенным станком. Он эффективно и с максимальной безопасностью работает с любыми колесными дисками и шинами.
Двухскоростной и мощный полуавтоматический станок быстро настраивается на тип меняемой оператором шины. Гидросистема станка активизируется отдельными переключателями, а устройство управления позволяет управлять движением всех гидравлических блоков и механизмов станка одной рукой.
Система перемещений самоцентрирующегося патрона позволяет производить монтаж-демонтаж шины независимо от формы и размера диска.
Два кронштейна с тефлоновыми роликами, двигающимися в симметричном направлении, дают оператору максимальную эффективность монтажа-демонтажа шины без повреждения диска колеса даже в наиболее трудных условиях.
Система управления данного станка снабжена цифровым микропроцессорным прибором давления, выполняющим функции манометра и рабочей станции управления для подъема и опускания стойки.
Вместе с тем, данный шиномонтажный станок имеет существенный недостаток, заключающийся в том, что станок "живет" сам в себе, то есть, всю информацию о технологическом процессе пользователю необходимо собирать и обрабатывать в реальном режиме времени традиционными методами сбора и обработки информации.
В большинстве случаев непосредственно пользователю, а также сервисным службам, эксплуатирующим шиномонтажный станок, необходимо бывает получить информацию о фактическом времени работы станка, о графике интенсивности нагрузок, о списке кодов ошибок управляющей системы станка.
В свою очередь, руководству предприятия, эксплуатирующего шиномонтажные станки, необходимо получать информацию о загруженности конкретного станка, распределении часов простоя станка для принятия решений об эффективном использовании станков.
Станки, работающие в режиме "сам в себе", на сегодняшний день не могут обработать и выдать полноценную информацию, интересующую пользователя. Другим недостатком этого станка является то, что в конструкции станка отсутствуют средства самодиагностики. Система (устройство) управления не получает реальной информации о работе блоков, механизмов и систем этого станка. Примером этого может служить то, что при разбортовке колеса не контролируется крутящий момент вращения диска колеса, что может привести к серьезным повреждениям самой покрышки, а также к разрушению узлов редуктора станка.
Следующим недостатком является то, что в конструкции станка отсутствуют цепи контроля работы исполнительных механизмов. Примером этого может служить то, что при обрыве катушек управления работой различных механизмов сам станок продолжает бесконтрольно работать, что иногда приводит к разрушению отдельных механизмов и устройств станка.
Технический результат предлагаемого изобретения "Шиномонтажный станок" заключается в следующем:
1. упрощение процедуры инициализации и настройки (калибровки) шино-монтажного станка еще на стадии сборки изделия;
2. упрощение процедуры тестирования станка на предприятии-изготовителе на стадии сдачи изделия ОТК;
3. упрощение процедуры диагностирования станка обслуживающими центрами в случае выявления неисправностей;
4. получение корректной информации сервисными службами о фактическом времени работы станка, о дате начала эксплуатации, о списке кодов ошибок управляющей системы станка;
5. возможность загрузки новейшего программного обеспечения в управляющую систему станка (обновление программы) сервисными службами или пользователем;
6. получение руководством предприятия, эксплуатирующего станок или группу станков, информации о загруженности станков или конкретного станка в течение рабочей смены, суток, недели, месяца и т.п.;
7. получение информации о распределении часов простоя станка;
8. контроль за работой исполнительных механизмов станка посредством анализа сигналов, поступающих от датчиков узлов и механизмов станка, а также от датчиков сигналов обратной связи от цепей контроля работы исполнительных механизмов;
9. обеспечение безаварийной работы узлов и механизмов станка на основе анализа и контроля состояний этих узлов и механизмов при работе станка; при использовании информации, поступающей от цепей контроля работы исполнительных механизмов, это предотвратит разрушение и поломку узлов и механизмов станка, а также существенно облегчит поиск, установление причин разрушения и локализацию неисправности.
Указанный технический результат достигается следующим образом. Шиномонтажный станок, содержащий корпус, гидросистему и/или пневмосистему станка, предназначенную для управления посредством устройства управления всеми исполнительными устройствами и механизмами станка, систему перемещения самоцентирующегося зажимного патрона диска колеса, два кронштейна с роликами для монтажа-демонтажа шины, устройство накачки шины, устройство управления работой станка, содержащее микроконтроллер, систему датчиков, подсоединенных к станку и входам микроконтроллера, согласно изобретению содержит дополнительно подсоединенные к микроконтроллеру устройства управления работой станка часы-таймер реального или относительного времени, беспроводный интерфейс связи с внешними устройствами и энергонезависимую память с программой мониторинга системы с возможностью преобразования информации, получаемой по результатам мониторинга, к определенному виду и записи ее в определенные поля энергонезависимой памяти, а в последующем передачи этой информации из энергонезависимой памяти по запросу вышестоящего устройства по интерфейсу связи во внешнее устройство, при этом система управления получает возможность осуществлять от внешнего устройства дистанционное управление, загрузку и/или изменение программы функционирования, инициализации, настройки и тестирования станка через беспроводный интерфейс связи, а также возможность осуществлять контроль работы исполнительных механизмов посредством анализа сигналов, поступающих от датчиков узлов и механизмов станка, а также от датчиков сигналов обратной связи от цепей контроля работы исполнительных механизмов.
Станок может быть выполнен с односторонней связью по интерфейсу с внешним устройством. В этом случае предлагаемый шиномонтажный станок отличается от известного тем, что содержит дополнительно подсоединенные к микроконтроллеру устройства управления работой станка часы-таймер реального или относительного времени, симплексный беспроводный интерфейс связи и энергонезависимую память с программой мониторинга состояния и работы системы с возможностью преобразования информации, получаемой по результатам мониторинга, к определенному виду и записи ее в определенные поля энергонезависимой памяти, а в последующем передачи ее из энергонезависимой памяти по запросу пользователя во внешнее устройство по беспроводному интерфейсу связи.
Близкого аналога предлагаемому "Шиномонтажному станку" в доступной научно-технической и патентной информации не установлено.
В качестве отдаленного аналога предлагаемому устройству можно принять шиномонтажный станок итальянской компании SICAM по источнику научно-технической информации [1].
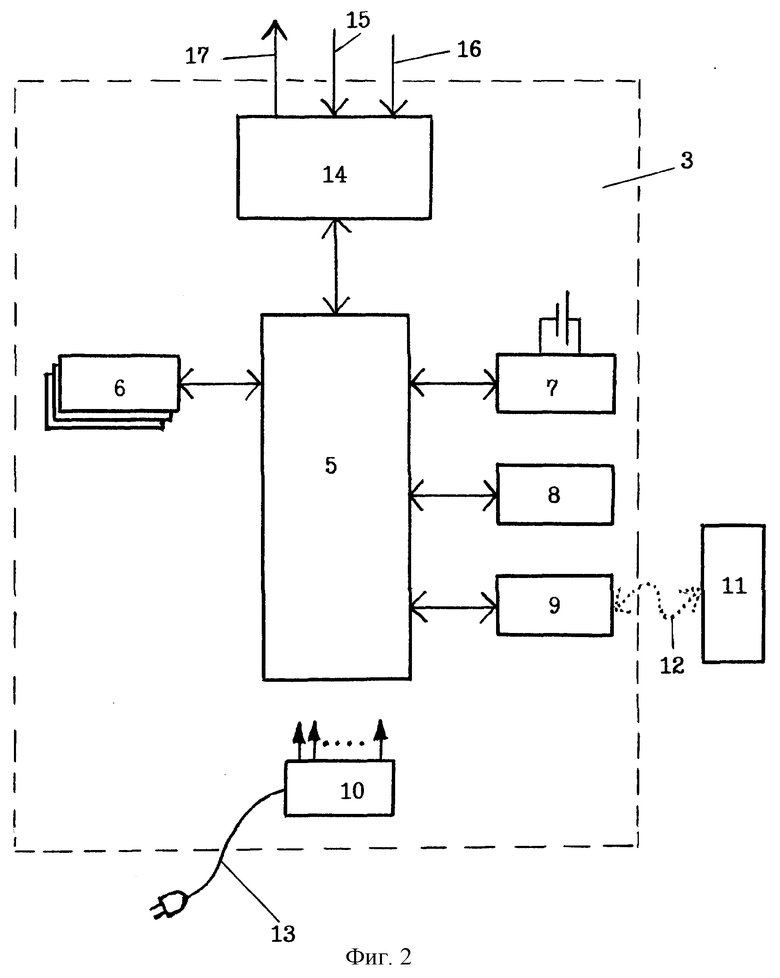
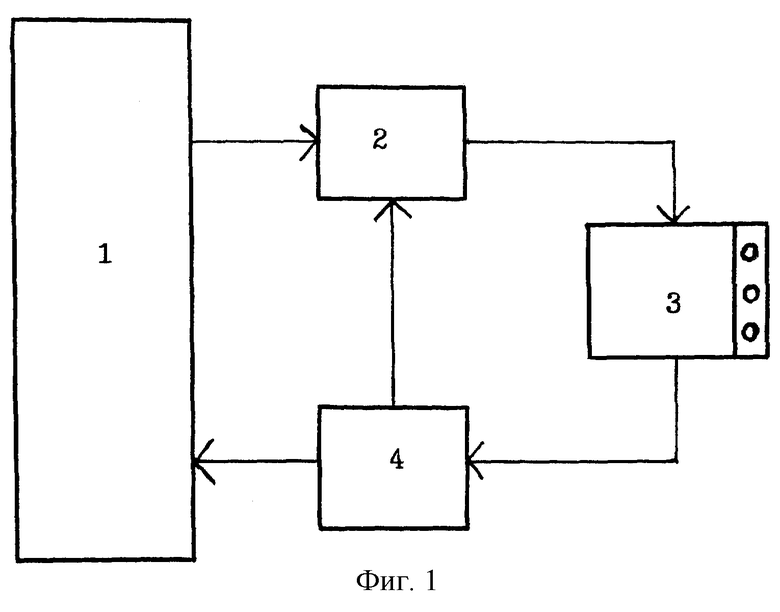
На фиг.1 изображен схематично предлагаемый шиномонтажный станок. На фиг.2 изображена схема устройства управления работой шиномонтажного станка, снабженная беспроводным интерфейсом связи.
Предлагаемый шиномонтажный станок содержит непосредственно сам станок 1 (фиг.1), к различным узлам и механизмам которого присоединены датчики 2, которые, в свою очередь, присоединены к микроконтроллеру устройства управления 3 станком.
Далее устройство управления 3 подсоединено к исполнительным механизмам 4, которые непосредственно соединены со станком 1. Кроме этого, исполнительные механизмы 4 соединены с датчиками 2, которые постоянно отслеживают состояние в работе исполнительных механизмов 4 (по цепям обратного контроля, идущих от исполнительных механизмов 4 к датчикам 2).
К микроконтроллеру 5 устройства управления 3 (фиг.2) подсоединены следующие узлы и микросхемы:
- панель(и) индикации и управления 6;
- часы-таймер реального или относительного времени 7, выполненные, например, на основе микросхемы DS1307 с подключенным к ней батарейным питанием;
- микросхема энергонезависимой памяти 8, например, AT24C256N-10SI-2,5;
- беспроводный интерфейс связи 9;
- блок питания 10, который вырабатывает требуемые напряжения питания для соответствующих микросхем и узлов шиномонтажного станка и подсоединен к ним.
Внешнее устройство 11 может быть соединено по беспроводному каналу связи 12 с управляющим устройством 3. Блок питания 10 имеет вывод 13 подачи сетевого напряжения.
К микроконтроллеру 5 через интерфейс согласования сигналов 14 поступают:
- сигналы обратной связи от цепей контроля работы исполнительных механизмов 4 по каналу связи 15;
- сигналы с датчиков 2 по каналу связи 16.
По каналу связи 17 от микроконтроллера 5 поступают сигналы управления к исполнительным механизмам 4.
Микроконтроллер 5 в комплексе с панелью индикации и управления 6, часами-таймером реального времени 7, энергонезависимой памятью 8, беспроводным интерфейсом связи 9 и блоком питания 10, а также каналами связи датчиков 2 с исполнительными механизмами 4 придает устройству управления 3 шиномонтажным станком 1 принципиально новые технические возможности и свойства.
Беспроводный интерфейс связи 9 может быть выполнен и функционировать по четырем вариантам, и принцип связи приведен ниже в таблице.
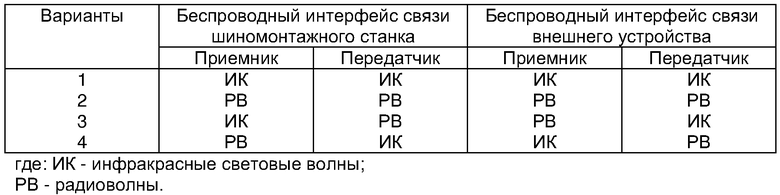
При этом по первому варианту фотоприемник беспроводного интерфейса связи выполнен на основе микросхемы TSOP1236 фирмы Vishay, а передатчик выполнен на основе обыкновенного ИК-светодиода.
По второму варианту приемник и передатчик могут быть выполнены на микросборке POK101007 фирмы Ericsson с использованием решения Bluetooth.
По третьему и четвертому вариантам связь между шиномонтажным станком 1 и внешним устройством 11 может быть выполнена на основе комбинаций каналов связи радиоволн и ИК-световых волн.
Все вышеописанное относится к шиномонтажному станку с беспроводным интерфейсом связи, при котором обеспечивается двухсторонняя связь станка с внешним устройством.
Также может быть выполнено устройство управления шиномонтажным станком с симплексным (односторонним) каналом связи. В этом случае передатчик информации физически располагают на шиномонтажном станке, а приемником является внешнее устройство 11. При этом информация может передаваться как посредством ИК-световых волн, так и радиоволн.
Радиоканал связи 12 может быть выполнен, например, на основе микросборок фирмы RFM.
Преимуществом шиномонтажного станка, реализованного с симплексным каналом связи, является то, что стоимость нового решения будет значительно ниже (особенно с ИК-каналом связи), так как в качестве передатчика используется обыкновенный ИК-светодиод.
Предлагаемый шиномонтажный станок, обеспечивающий двухстороннюю связь с внешним устройством, функционирует следующим образом.
В тело программы микроконтроллера 5 вставлены две дополнительные программы:
1. программа мониторинга состояния системы предотвращения аварийных ситуаций;
2. программа поддержки связи по беспроводному интерфейсу связи.
Вход в данные программы осуществляется по прерыванию. Для первой программы - по прерыванию от таймера (или часов-таймера реального или относительного времени), а для второй программы - по прерыванию от последовательного интерфейса микроконтроллера 5. Обе программы работают в фоновом режиме.
Программа мониторинга состояния системы собирает всю необходимую информацию, касающуюся работы и состояния системы станка, а именно:
- информацию с первичных датчиков 2 положений исполнительных механизмов и узлов станка, давлений в гидросистеме и пневмосистеме и т.п.;
- информацию с выходов управляющих исполнительных механизмов;
- информацию о состоянии систем станка;
- информацию с панели индикации управления;
- другую необходимую технологическую информацию.
Далее эта информация декодируется и производится ее первичный анализ с целью отбора интересующей информации. После этого производится ее кодирование с целью уменьшения объема, занимаемого этой информацией.
Специальная подпрограмма в соответствии с определенным алгоритмом производит запись этой закодированной информации в ячейки энергонезависимой памяти 8.
Программа поддержки связи по беспроводному интерфейсу связи 9 осуществляет следующие действия:
- чтение значений времени из часов-таймера реального или относительного времени 7 и выдача этой информации в канал связи 12 в соответствии с определенным протоколом обмена;
- чтение и изменение полей энергонезависимой памяти 8;
- чтение значений информации с датчиков первичных величин;
- чтение значений информации с выходов исполнительных механизмов станка;
- чтение и запись определенных переменных и констант, с которыми работает "основная" программа управления микроконтроллера 5;
- выдача значений из канала связи 12 в соответствии с определенным протоколом в исполнительные механизмы 4 станка;
- изменение памяти программ или запуска памяти программ микроконтроллера 5 в соответствии с информацией, полученной из канала связи 12;
- запуск программы шиномонтажного станка с определенного места с определенными параметрами;
- запись/чтение ресурсов микроконтроллера 5;
- контроль за работой исполнительных механизмов станка посредством анализа сигналов, поступающих как от датчиков узлов и механизмов станка, так и датчиков сигналов обратной связи от цепей контроля работы исполнительных механизмов;
- обеспечение безаварийной работы узлов и механизмов станка на основе анализа и контроля состояния этих узлов и механизмов при работе станка; при использовании информации, поступающей от цепей контроля работы исполнительных механизмов, это предотвращает разрушение и поломку узлов и механизмов станка, а также существенно облегчает поиск и установление причин разрушения и локализацию неисправности;
- программа мониторинга состояния и сигналов с определенным периодом времени отслеживает разрешенные и запрещенные состояния системы, валидность сигналов с датчиков и в случае обнаружения внештатных ситуаций переводит станок в безопасное состояние.
Инициированные пользователем действия позволяют производить обмен информацией между внешним устройством и станком, а также позволяют осуществлять управление станком, тестирование и диагностику его через беспроводный канал связи 12.
Вышеописанное относится к предлагаемому станку с двухсторонней связью по беспроводному интерфейсу связи с внешним устройством 11.
Шиномонтажный станок с односторонней связью с внешним устройством 11 функционирует аналогичным образом с двухсторонней связью, за исключением того, что программа поддержки связи по беспроводному интерфейсу связи 9 несколько упрощена.
При этом вывод информации в канал связи 12 осуществляется путем длительного удерживания (5 секунд и более) определенной кнопки на панели индикации и управления 6 станка 1. При этом внешнее устройство 11 должно быть переведено в состояние ожидания данных. Протокол интерфейса в данном случае ориентирован на выдачу информации.
Выдача информации производится блоковыми посылками, в которые включена информация об уникальном серийном номере шиномонтажного станка, значение часов-таймера реального или относительного времени 7, информация из энергонезависимой памяти 8 и другая необходимая технологическая информация.
При осуществлении двухсторонней или односторонней связи предлагаемого шиномонтажного станка 1 с внешним устройством 11 по беспроводному интерфейсу связи 9 часы-таймер реального или относительного времени 7 могут быть сконструированы таким образом, что смогут хранить информацию как об изменении реального времени, так и об изменении относительного времени.
Реальное время можно выставлять на таймере:
- при осуществлении двухсторонней связи между станком и внешним устройством посредством воздействия информации на станок по беспроводному интерфейсу связи или путем запуска программы, которая установит (однократно) истинное значение часов-таймера реального времени;
- при осуществлении односторонней связи от станка к внешнему устройству аналогично вышеописанному посредством запуска программы или путем пересчета относительного времени.
Пересчет и хранение относительного времени особенно выгодны в шиномонтажных станках, где главное требование предъявляется к его дешевизне.
Получение реального времени осуществляет внешнее устройство 11 путем пересчета из относительного, так как само хранит реальное время.
Информация, считанная внешним устройством 11 (в качестве него выступает компьютер), из управляющего устройства 3 шиномонтажного станка интерпретируется в удобном для восприятия виде на дисплее внешнего устройства 11.
Пользователь, запустив специальную программу, содержащуюся во внешнем устройстве 11, может производить тестирование, диагностирование станка и дистанционное управление им или группой станков. Калибровка (настройка) станка осуществляется также по запуску специальной программы.
Источники информации
1. Шиномонтажный станок итальянской компании SICAM марки "FALCO 1200 COMBINED", опубликовано в рекламном проспекте эксклюзивного дистрибьютера SICAM в России компании "ЕВРОСИВ", адрес в Интернете www.eurosiv.ru.
Изобретение относится к средствам для установки шин на колесные диски. Станок содержит корпус, устройство перемещения самоцентрирующего зажимного патрона диска колеса, два кронштейна с роликами для монтажа-демонтажа шины, устройство накачки шины, гидравлические и/или пневматические исполнительные устройства и механизмы. Имеется устройство управления станком, включающее в себя микроконтроллер, а также датчики состояния механизмов станка и датчики сигналов обратной связи от цепей контроля работы исполнительных устройств. Устройство управления дополнительно содержит часы-таймер реального или относительного времени, беспроводный интерфейс связи с внешними устройствами и энергонезависимую память с программой мониторинга управления, преобразования получаемой информации к определенному виду, записи ее в определенные поля энергонезависимой памяти и передачи из энергонезависимой памяти по запросу через беспроводный интерфейс связи во внешнее устройство. Устройство управления выполнено с возможностью осуществления от внешних устройств дистанционного управления, загрузки и/или изменения программы функционирования, инициализации, настройки и тестирования, а также с возможностью осуществления контроля работы исполнительных устройств посредством анализа сигналов с датчиков состояния механизмов станка, а также с датчиков сигналов обратной связи от цепей контроля работы исполнительных устройств. Станок обладает расширенными функциональными возможностями. 2 ил., 1 табл.
Шиномонтажный станок, содержащий корпус, устройство перемещения самоцентрирующего зажимного патрона диска колеса, два кронштейна с роликами для монтажа-демонтажа шины, устройство накачки шины, гидравлические и/или пневматические исполнительные устройства и механизмы станка, к которым подключено устройство управления станком, включающее в себя микроконтроллер, а также подсоединенные к нему датчики состояния механизмов станка и датчики сигналов обратной связи от цепей контроля работы исполнительных устройств, отличающийся тем, что устройство управления станком содержит дополнительно подсоединенные к микроконтроллеру часы-таймер реального или относительного времени, беспроводный интерфейс связи с внешними устройствами и энергонезависимую память с программой мониторинга управления станком, преобразования информации, получаемой по результатам мониторинга, к определенному виду, записи ее в определенные поля энергонезависимой памяти и передачи из энергонезависимой памяти по запросу через беспроводный интерфейс связи во внешнее устройство, при этом устройство управления станком выполнено с возможностью осуществления от внешних устройств дистанционного управления, загрузки и/или изменения программы функционирования, инициализации, настройки и тестирования, а также с возможностью осуществления контроля работы исполнительных устройств посредством анализа сигналов, поступающих с датчиков состояния механизмов станка, а также с датчиков сигналов обратной связи от цепей контроля работы исполнительных устройств.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| DE 4323549 A1, 20.01.1994 | |||
| ШИНОМОНТАЖНАЯ УСТАНОВКА | 1993 |
|
RU2088425C1 |
| Шиномонтажный стенд | 1991 |
|
SU1789357A1 |

