Изобретение относится к технической области контроля полых объектов или сосудов, например, таких как бутылки, банки, флаконы, в частности, выполненные из стекла, с целью измерения вертикальности таких сосудов.
В технической области контроля стеклянных сосудов, таких как бутылки, существует потребность в измерении вертикальности сосудов, в частности, чтобы обеспечивать разлив в бутылки и их упаковку. Необходимо отметить, что в известных решениях вертикальность выражают различными способами. Например, вертикальность сосуда выражают при помощи угла или градуса наклона. В других решениях вертикальность выражают как отклонение между центром дна сосуда и центром поперечного сечения сосуда, взятого на выбранной высоте сосуда, например, кольца. Вместо учета разности между центрами двух сечений сосуда вертикальность рассматривают также как измерение радиального отклонения за один оборот точки сосуда, взятой на данной высоте сосуда.
Независимо от способа выражения вертикальности измерение вертикальности сосуда дает важную информацию о размерных характеристиках сосуда, что позволяет, например, выявить дефект его вертикальности, когда измерение выходит за пределы контрольного значения. Из уровня техники известны различные решения для измерения вертикальности бутылок.
Например, в документе US 4433785 описана система контроля, содержащая два свободных колеса, входящих в контакт с дном бутылки. Во время вращения сосуда на посту контроля вертикальные перемещения этих двух колес измеряют при помощи электромагнитных датчиков положения. Такая система не приспособлена для скоростного контроля по причине риска потери контакта свободных колес с дном бутылок. Кроме того, такая система не может обеспечить точного измерения и к тому же подвержена быстрому износу. В целом, эта система измеряет только движения дна бутылки относительно оси вращения, определяемой постом контроля. Поэтому когда, например, сосуд имеет деформации на корпусе, он перестает вращаться вокруг своей оси симметрии, и измерение вертикальности оказывается ошибочным.
В документе US 7010863 описан другой метод, в котором два свободных колеса заменены двумя оптическими датчиками измерения, позволяющими направлять свет в две точки дна бутылки, опирающейся на опорную плоскость. При помощи света, отраженного бутылкой, опирающейся на опорную плоскость, определяют отклонение между опорной плоскостью и плоскостью, перпендикулярной к оси вращения, чтобы выявить дефект вертикальности. Такое устройство позволяет устранить недостатки, связанные с использованием свободных колес. Однако принцип измерения в таком устройство основан на предположении, что сосуд является идеальным в любой точке за исключением дна, которое имеет наклон. Это предположение приводит к выводу, что центральная ось совпадает с осью вращения контрольного поста и что достаточно измерить перемещения дна сосуда. Однако на практике ось сосуда не совпадает с осью вращения поста контроля. Поэтому этот известный метод не позволяет получить реальное измерение вертикальности сосуда. К тому же такие известные технические решения не позволяют измерять вертикальность горлышка таких сосудов.
В документе ЕР 0341849 описан способ измерения профиля и вертикальности сосуда, имеющего дно, от которого поднимается вертикальная стенка. Сосуд свободно опирается на опорную плоскость, которую поворачивают для обеспечения измерений по всей периферии сосуда. Плоскость опоры сосуда служит контрольной плоскостью для измерения вертикальности. Однако в области промышленного применения измерения вертикальности, выполняемые при помощи метки, находящейся на системе манипулирования, не отличаются надежностью. В частности, это относится к измерению вертикальности сосудов на вращающемся посту, входящему в состав производственной линии. Действительно, такой вращающийся пост контроля содержит опорную плоскость для сосуда и систему приведения во вращение сосуда, состоящую из приводного ролика, вращающего сосуд, который опирается по меньшей мере на два упора во время своего вращения. Ось вращения сосуда постоянно меняется, поэтому движение является случайным и непредсказуемым. Кроме того, невозможно поместить дно сосуда в контрольную плоскость, образованную опорной плоскостью, учитывая, в частности, не круглое сечение сосудов (овальное или с фасками), присутствие неровного дна, деформации сосуда и дефекты, влияющие на систему приведения во вращение сосуда.
В документе FR 2973501 описано устройство измерения вертикальности сосудов. Когда сосуд приводят во вращение, измеряют положения контрольных точек на дне сосуда. Измерения, производимые таким устройством, не являются в достаточной мере корректными, так как во время вращения сосудов оно не учитывает возможные боковые перемещения дна сосудов.
В документе US 6212962 описано устройство контроля поступательно перемещающихся сосудов, предназначенное, в частности, для определения наклона корпуса сосуда относительно его дна. Такое устройство не позволяет выявить дефект вертикальности, если изделие имеет, например, деформацию своей стенки на высоте измерения контрольного изделия. Так, присутствие впадины, фаски или овальности на данной высоте может привести к ошибочному выводу о наклоне изделия.
В документе WO 2012/042582 описано устройство контроля стеклянных бутылок, предназначенное для точного контроля наклона верхней поверхности горловины бутылок. Система получения изображений горловины бутылки позволяет обнаружить на изображении горловины две точки, находящиеся на верхней поверхности горловины бутылки. Одновременно обнаруживают две точки, находящиеся на нижнем конце бутылки, на изображении утора, снятом при помощи системы получения изображений утора. Наклон двух точек утора позволяет компенсировать наклон двух точек горловины, что позволяет вычислить верхний наклон бутылки и, следовательно, контролировать наклон верхней поверхности горловины бутылки. Такие устройство не может измерять дефект вертикальности бутылки, который является дефектом формы корпуса или горлышка и не требует знания наклона поверхности кольца бутылки.
В документе US 2011/141265 описан способ контроля качества сосудов, выходящих из формовочной машины. Сосуды являются еще горячими, и ими невозможно манипулировать по причине их хрупкости. Однако очевидно, что вращение позволяет при помощи ограниченного числа датчиков получить большое количество изображений для обеспечения точности.
Кроме того, в этом способе снимают изображения сосуда, позволяющие путем их обработки определить противоположные края сосуда. Этот способ определяет вдоль горизонтальных линий, распределенных по высоте сосуда, середины противоположных краев сосуда и в качестве измерения вертикальности рассматривает углы этих сегментов относительно вертикали, то есть относительно конвейера, как показано на фиг. 18-21. Предложенное измерение вертикальности не является корректным, так как оно не учитывает истинной вертикальности корпуса или горлышка, которая должна быть идеальной относительно дна сосуда. Действительно, в этом способе положение дна предполагается идентичным положению конвейера, что не соответствует действительности.
Точно так же, в документе US 6025910 описан метод контроля бутылок, проходящих поступательно перед постом контроля, согласно которому последовательно снимают изображения каждого сосуда с целью их анализа и определения, в частности, наклона бутылок. Описанное в этом документе решение имеет те же недостатки, что и устройства, описанные в документах US 6212962 и WO 2012/042582, так как они не учитывают форму корпуса или горлышка бутылки.
Задача изобретения состоит в устранении вышеуказанных недостатков, присущих известным техническим решениям, за счет создания нового способа, позволяющего измерять реальную вертикальность сосудов, причем эти измерения осуществляют на производственной линии при помощи вращающегося поста для обеспечения измерений по всей периферии сосудов.
В связи с этим объектом изобретения является способ измерения вертикальности на сосуде, опирающемся на опорную поверхность и имеющем кольцо и дно, от которого поднимается вертикальная стенка, сопряженная с дном через пятку, при этом вертикальная стенка имеет горлышко, оснащенное или не оснащенное в своем основании плечом, при этом согласно способу:
- сосуд приводят во вращение вокруг вертикальной оси, близкой к оси симметрии изделия,
- с одной стороны сосуда располагают по меньшей мере одну камеру, которая выдает последовательность изображений сосуда по меньшей мере за половину оборота, оптическая ось наблюдения которой является по существу ортогональной к вертикальной оси сосуда и боковое поле которой простирается в поперечном направлении, ортогональном к вертикальной оси и к оптической оси.
Согласно изобретению:
- определяют реальную высоту сосуда,
- и при каждом инкременте вращения сосуда по меньшей мере за половину оборота:
• снимают по меньшей мере одно изображение сосуда таким образом, чтобы получить изображение левого края кольца, изображение правого края кольца, матричное изображение левого края пятки, плеча и/или основания горлышка, матричное изображение правого края, соответственно пятки, плеча и/или основания горлышка,
• анализируют:
* изображение левого края кольца и изображение правого края кольца, чтобы определить по меньшей мере координату в поперечном направлении реального положения кольца,
* матричное изображение левого края, чтобы определить координаты в поперечном и вертикальном направлениях левой точки позиционирования Tg,
* матричное изображение правого края, чтобы определить координаты в поперечном и вертикальном направлениях правой точки позиционирования Td,
• на перпендикуляре к сегменту прямой, проходящей через левую и правую точки позиционирования на реальной высоте сосуда, взятой от указанного сегмента прямой, определяют по меньшей мере координату в поперечном направлении теоретического положения кольца,
- и на основании изменений в поперечном направлении координат реального положения кольца и теоретического положения кольца, учитываемых в течение по меньшей мере половины оборота сосуда, из их максимальной разности выводят измерение вертикальности на сосуде.
Кроме того, способ в соответствии с изобретением имеет также в комбинации по меньшей мере один или другой из следующих дополнительных отличительных признаков:
- в качестве левого и правого матричных изображений снимают матричные изображения пятки, плеча и/или основания горлышка, чтобы измерить вертикальность горлышка сосуда, корпуса сосуда и/или общую вертикальность,
- при каждом инкременте вращения определяют реальное положение кольца, анализируя линейное или матричное изображение, содержащее в поперечном направлении кольцо полностью, определяя соответствующие положения правого края и левого края кольца и вычисляя точку, зависящую от этих двух краев,
- для каждого сосуда:
• характеризуют форму и исходное положение левого края и правого края сосуда в первом соответственно левом и правом матричном изображении, снятом во время вращения сосуда,
• в каждом следующем соответственно левом и правом матричном изображении, снятом во время вращения сосуда, выявляют форму соответственно левого и правого края сосуда, охарактеризованную в первом изображении, чтобы определить левую и правую точки позиционирования,
- определяют левую и правую точки позиционирования в исходном изображении, выбирая их таким образом, чтобы они были симметричными относительно оси симметрии сосуда, оставляя между ними расстояние порядка диаметра опорной плоскости или сосуда,
- определяют левую и правую точки позиционирования в исходном изображении, выбирая их таким образом, чтобы они находились в опорной плоскости,
- характеризуют форму правого края и левого края сосуда при помощи по меньшей мере контура сосуда, проявляющегося в матричном изображении и описанного совокупностью точек и/или сегментов и/или участков кривых, и в каждом следующем изображении выявляют по меньшей мере контур, охарактеризованный в первом изображении, стараясь наложить по меньшей мере указанный контур на контур, присутствующий в каждом следующем изображении, при помощи операций поступательного перемещения и/или вращения,
- для каждого типа сосуда определяют расстояние теоретического положения кольца по отношению к сегменту прямой на основании измерения или определенной константы,
- снимают изображение левого края и изображение правого края, включая наблюдение верхнего края сосуда, чтобы определить высоту сосуда.
Другим объектом изобретения является устройство для измерения вертикальности на сосуде, имеющем кольцо и дно, от которого поднимается вертикальная стенка, сопряженная с дном через пятку, при этом вертикальная стенка имеет горлышко, оснащенное или не оснащенное в своем основании плечом, при этом устройство содержит:
- систему приведения во вращение сосуда вокруг его вертикальной оси симметрии,
- по меньшей мере одну камеру, которая выдает последовательность изображений сосуда по меньшей мере за половину оборота, оптическая ось наблюдения которой является по существу ортогональной к вертикальной оси сосуда и боковое поле которой простирается в поперечном направлении, ортогональном к вертикальной оси и к оптической оси,
- блок записи последовательностей изображений сосудов,
- блок анализа изображений и последовательностей изображений, поступающих по меньшей мере от одной камеры, соединенный с блоком записи.
Согласно изобретению:
- для каждого инкремента вращения по меньшей мере одна камера снимает по меньшей мере одно изображение левого и правого краев кольца, левое матричное изображение пятки, плеча и/или основания горлышка, правое матричное изображение соответственно пятки, плеча и/или основания горлышка изделия,
- блок обработки:
• анализирует:
* изображение левого края кольца и изображение правого края кольца, чтобы определить по меньшей мере координату в поперечном направлении реального положения кольца,
* матричное изображение левого края, чтобы определить координаты в поперечном и вертикальном направлениях левой точки позиционирования,
* матричное изображение правого края, чтобы определить координаты в поперечном и вертикальном направлениях правой точки позиционирования,
• учитывает реальную высоту сосуда,
• на перпендикуляре к сегменту прямой, проходящей через левую и правую точки позиционирования, на реальной высоте сосуда, взятой от указанного сегмента прямой, определяет по меньшей мере координату в поперечном направлении теоретического положения кольца,
• анализирует координаты реального положения кольца и теоретического положения кольца, учитываемые в течение по меньшей мере половины оборота сосуда, чтобы на основании изменений отклонения их положения вывести измерение вертикальности для сосуда.
Кроме того, устройство в соответствии с изобретением имеет также в комбинации по меньшей мере один или другой из следующих дополнительных отличительных признаков:
- оно содержит линейную камеру, решетка которой расположена в плоскости, перпендикулярной к оси вращения и секущей кольцо сосуда ниже его вершины таким образом, чтобы передавать в блок анализа при каждом инкременте вращения горизонтальный разрез кольца, в котором выделяются два края кольца,
- оно содержит матричную камеру, оптическая ось наблюдения которой проходит вблизи вертикальной оси изделия и под вершиной или включая вершину кольца, таким образом, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение кольца,
- оно содержит матричную камеру, оптическая ось наблюдения которой проходит вблизи вертикальной оси изделия и над дном сосуда, таким образом, чтобы обе пятки, правая и левая, постоянно находились в ее поле наблюдения, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение обеих пяток,
- оно содержит оптическое, например катоптрическое и/или призматическое, устройство, установленное между камерой, наблюдающей дно, и контролируемым изделием таким образом, чтобы оптимизировать поле, при этом указанное устройство может быть выполнено регулируемым для адаптации к диаметру сосуда,
- оно содержит две синхронные матричные камеры, соответствующие оптические оси наблюдения которых являются ортогональными к вертикальной оси сосуда и находятся над дном сосуда, при этом поле первой камеры содержит только правую пятку, а поле другой камеру - левую пятку, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение для каждой пятки.
Различные другие отличительные признаки будут более очевидны из нижеследующего описания вариантов осуществления изобретения, представленных в качестве неограничивающих примеров, со ссылками на прилагаемые чертежи.
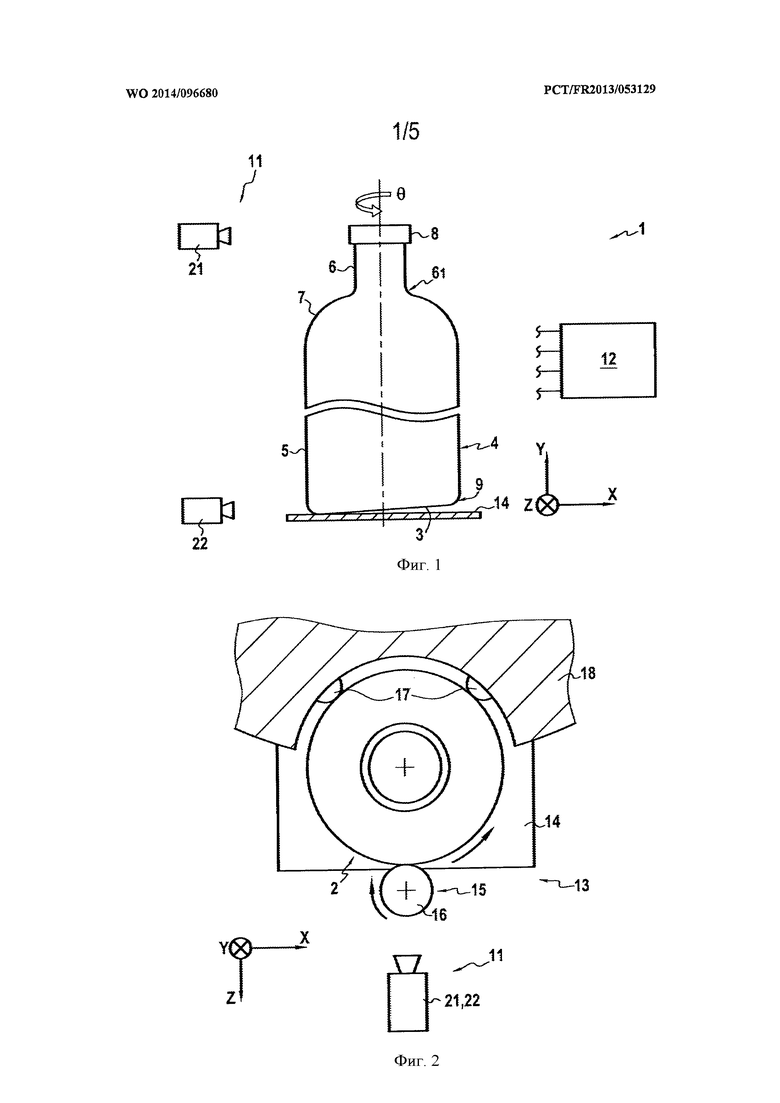
На фиг. 1 схематично показан пример осуществления устройства визуального контроля в соответствии с изобретением, вид сбоку;
на фиг. 2 показан пример приведения во вращение сосуда во время измерения вертикальности при помощи устройства визуального контроля в соответствии с изобретением, вид сверху;
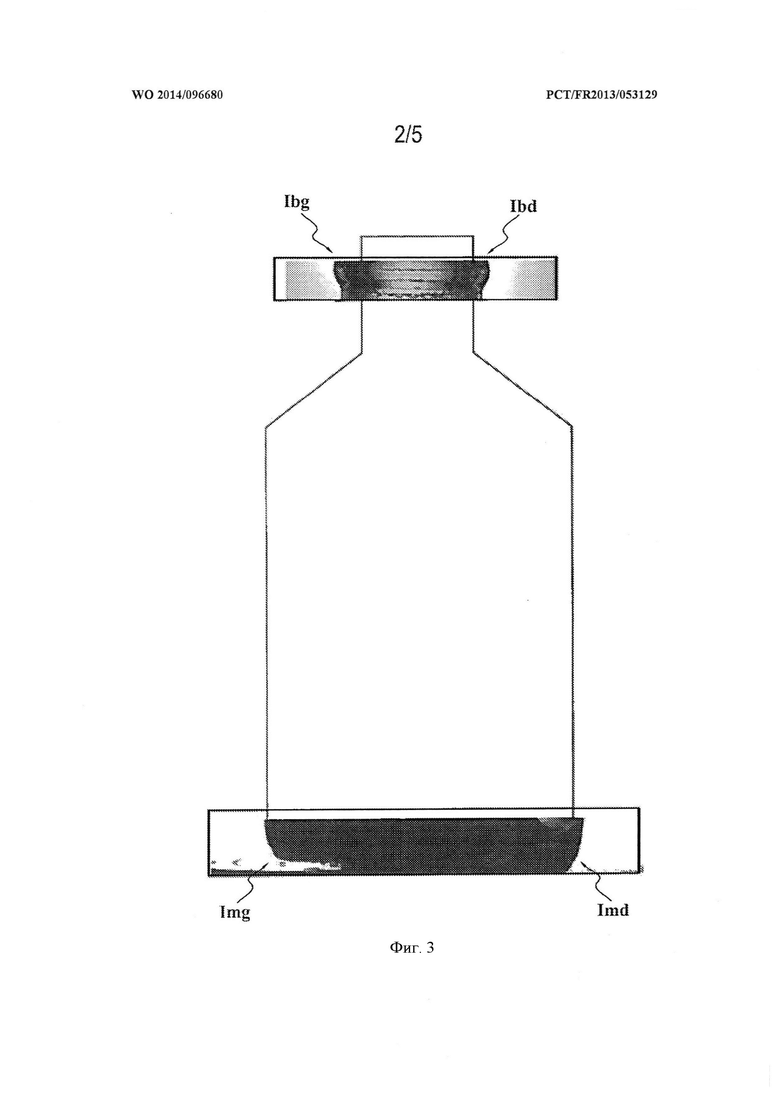
на фиг. 3 представлен схематичный вид снятых изображений кольца и утора сосуда;
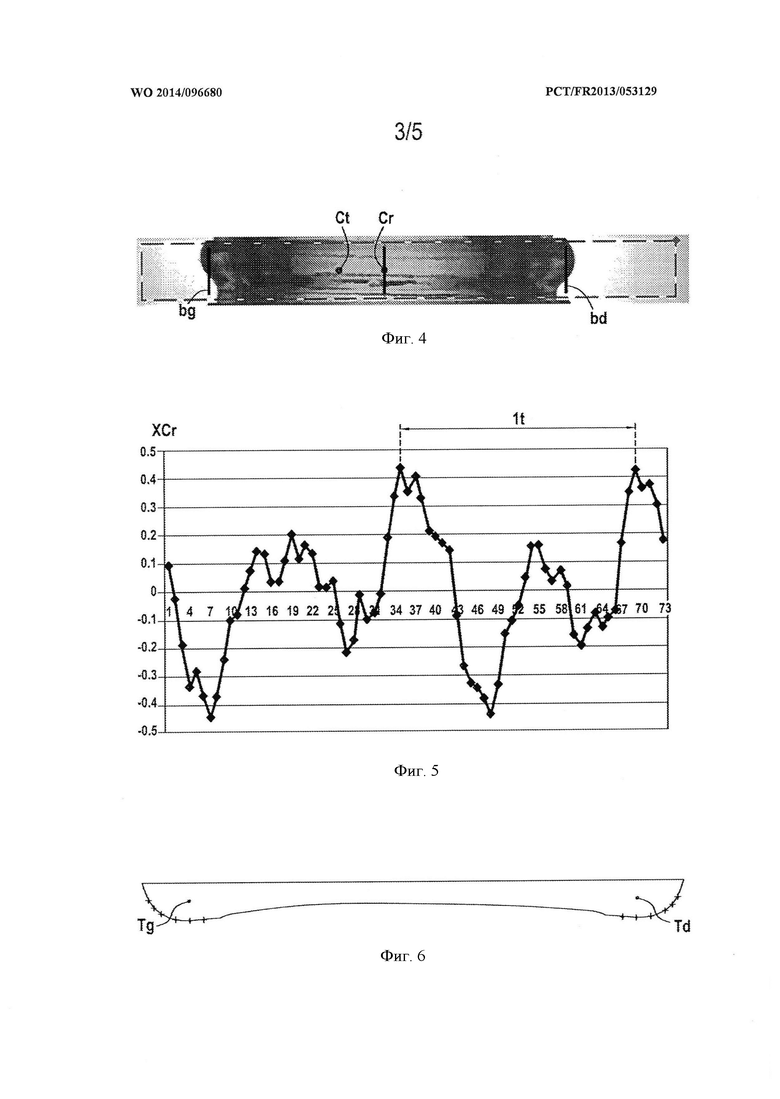
на фиг. 4 изображено кольцо, на котором видны реальное положение Cr кольца и теоретическое положение Ct кольца;
на фиг. 5 изображена кривая, показывающая боковое перемещение XCr реального положения Cr кольца в течение по меньшей мере одного оборота сосуда;
на фиг. 6 показан утор сосуда, с которым связаны левая Tg и правая Td точки позиционирования;
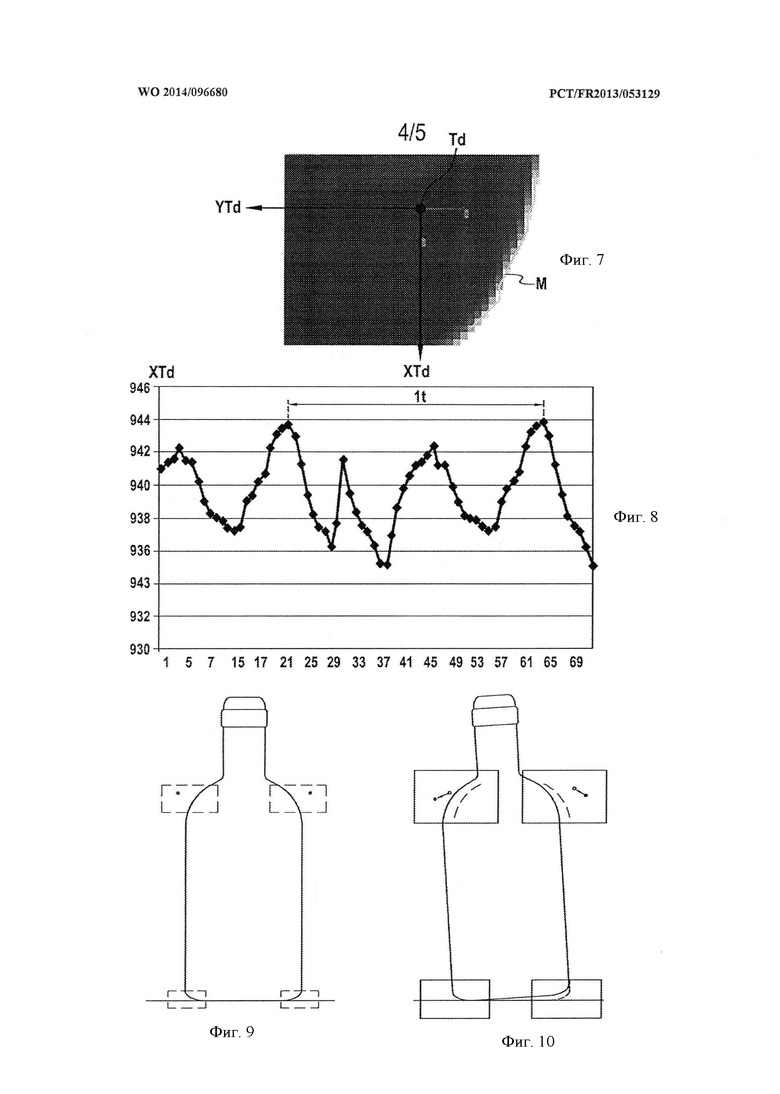
на фиг. 7 показан правый утор сосуда, с которым связана точка Td позиционирования, увеличенный вид;
на фиг. 8 представлена кривая, показывающая боковое перемещение, то есть изменения координаты XTd правой точки Td позиционирования правого утора в течение по меньшей мере одного оборота сосуда;
на фиг. 9 и 10 представлены два последовательных изображения, иллюстрирующие принцип изобретения;
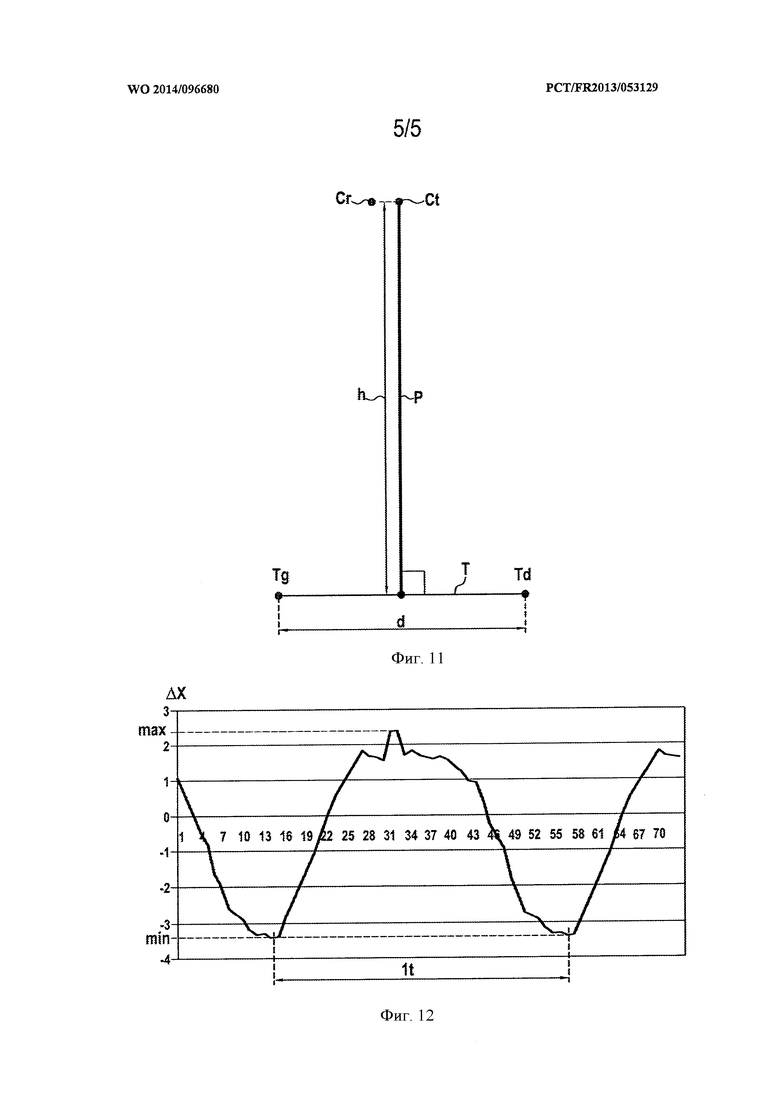
на фиг. 11 показана схема, иллюстрирующая принцип измерения в соответствии с изобретением;
на фиг. 12 представлена кривая, показывающая отклонение между измеренным положением кольца и ожидаемым положением кольца по меньшей мере за один оборот сосуда.
На фиг. 1 и 2 показано устройство 1 для измерения вертикальности на сосудах 2, например, из стекла, таких как бутылки. Обычно каждый сосуд 2 имеет дно 3, от которого поднимается вертикальная стенка 4. В случае сосуда типа бутылки вертикальная стенка 4 содержит, начиная от дна 3, часть 5, образующую корпус бутылки, который сопрягается с горлышком 6 через плечо 7. Противоположно своему основанию 61 сопряжения с плечом 7 горлышко 6 имеет часть, называемую кольцом или горловиной 8. С противоположной стороны корпус 5 сосуда 2 сопрягается с дном 3 через пятку или утор 9.
Устройство 1 контроля содержит систему 11 визуального контроля, связанную с блоком 12 анализа и обработки, позволяющим определить измерение вертикальности сосудов 2.
Измерение вертикальности сосуда 2 осуществляют, когда сосуд приводится во вращение (угол θ) вокруг вертикальной оси Y в течение по меньшей мере половины оборота. Для этого с каждым сосудом 2 взаимодействует приводная система 13. Например, приводная система 13 содержит плоскость 14 скольжения или опоры для дна 3 сосуда 2, а также систему 15 приведения во вращение, содержащую ролик или колесико 16 для приведения во вращение сосуда, который опирается своим корпусом 5 на два упора 17. Эти два упора 17 являются, например, частью манипуляционной звездочки 18, которая позволяет последовательно помещать сосуды 2 перед системой 11 визуального контроля.
Каждый сосуд 2 остается перед устройством 1 контроля в течение времени, необходимого для осуществления по меньшей мере половины оборота вокруг самого себя, в течение которого происходят измерения, что будет описано ниже. Подробное описание приводной системы 13 и системы 15 приведения во вращение опускается, так как они не являются объектами изобретения и хорошо известны специалисту. Следует отметить, что система 15 приведения во вращение не может помещать сосуды 2 в воспроизводимое фиксированное положение по отношению к устройству 1 контроля и, в частности, на плоскость 14 скольжения. Таким образом, как показано на фиг. 1, дно 3 сосуда может не полностью опираться на плоскость 14 скольжения во время вращения сосуда.
Система 11 визуального контроля содержит по меньшей мере одну камеру и в примере, представленном на фиг. 1 и 2, первую камеру 21, связанную с блоком 12 анализа и обработки и выполненную с возможностью съемки изображений сосуда 2 таким образом, чтобы получать по меньшей мере изображение Ibg левого края кольца 8 и изображение Ibd правого края кольца 8. Эта камера 21 имеет оптическую ось Z наблюдения, по существу ортогональную к вертикальной оси Y сосуда, и имеет боковое поле, простирающееся в поперечном направлении X, ортогональном к вертикальной оси Y и к оптической оси Z. Согласно примеру осуществления эта первая камера является линейной камерой, решетка которой расположена в плоскости, перпендикулярной к оси вращения и секущей кольцо 8 сосуда под его вершиной, чтобы при каждом инкременте вращения передавать в блок 12 анализа горизонтальный разрез кольца, в котором можно различить два края кольца, называемые левым краем и правым краем с учетом их положения, проявляющегося на каждом из снятых камерой изображений (фиг. 3). Таким образом, определения «правый» и «левый» следует рассматривать с точки зрения наблюдения при каждой съемке, так как имеющий форму тела вращения сосуд как таковой на самом деле не имеет левой или правой стороны.
Согласно варианту осуществления, представленному на фиг. 3, устройство содержит первую матричную камеру 21, оптическая ось Z наблюдения которой проходит вблизи вертикальной оси Y сосуда 2, охватывая обе стороны сосуда, чтобы при каждом инкременте вращения передавать в блок 12 анализа только одно матричное изображение кольца, включающее в себя изображения Ibg, Ibd левого и правого краев кольца 8. Необходимо отметить, что можно предусмотреть наблюдение с двух сторон кольца при помощи двух камер, однако это не дает никакого технического или экономического преимущества.
Устройство 11 визуального контроля в соответствии с изобретением содержит также вторую камеру 22, связанную с блоком 12 анализа и обработки и выполненную с возможностью съемки изображений сосуда 2 таким образом, чтобы получать матричное изображение левого и правого краев целевой зоны сосуда, быстро меняющейся в плоскости наблюдения, ограниченной вертикальной осью Y и поперечной осью X. Таким образом, в качестве целевых зон матричная камера 22 снимает левое матричное изображение Img пятки 9, плеча 7 и/или основания 61 горлышка сосуда и правое матричное изображение Imd пятки 9, плеча 7 и/или основания 61 горлышка сосуда.
В примере, представленном на чертежах, устройство 11 визуального контроля содержит матричную камеру 22, оптическая ось Z наблюдения которой проходит вблизи вертикальной оси Y сосуда, охватывая дно 3 сосуда таким образом, чтобы обе пятки 9, правая и левая, постоянно находились в ее поле наблюдения, чтобы при каждом инкременте вращения передавать в блок 2 анализа и обработки матричное изображение обеих пяток.
Разумеется, согласно этому варианту осуществления обе камеры 21, 22 являются синхронными. Можно предусмотреть использование второй матричной камеры 22, то есть всего трех камер, и в этом случае поле первой матричной камеры содержит только правую пятку, правое плечо или правое кольцо горлышка сосуда, тогда как вторая матричная камера снимает только левую пятку, левое плечо или левое кольцо горлышка сосуда, чтобы при каждом инкременте вращения передавать в блок 12 анализа левое и правое матричные изображения пятки, плеча или основания горлышка сосуда. Следует отметить, что обе матричные камеры не обязательно расположены таким образом, чтобы снимать изображения двух целевых зон, расположенных симметрично противоположно с одной и с другой стороны сосуда.
Согласно другому варианту осуществления можно предусмотреть использование только одной матричной камеры, наблюдающей сосуд 2, чтобы располагать изображениями левого и правого краев Ibg, Ibd кольца и матричными изображениями левого и правого краев Img, Imd утора, плеча и/или основания горлышка.
Необходимо отметить, что съемка изображений Ibg, Ibd левого и правого краев кольца 8 в комбинации с матричными изображениями Img, Imd левой и правой пяток позволяет измерить вертикальность сосуда 2, то есть общую вертикальность сосуда.
Следует отметить, что матричная камера или матричные камеры 22 могут быть выполнены с возможностью получения левого и правого матричных изображений плеча или основания 61 горлышка 6 сосуда таким образом, чтобы:
- в комбинации со съемками изображений правого и левого краев Ibg, Ibd кольца обеспечивать измерение вертикальности горлышка 6 сосуда,
- и/или в комбинации со съемками левого и правого матричных изображений Img, Imd пятки обеспечивать измерение вертикальности корпуса 5 сосуда.
Таким образом, устройство 1 в соответствии с изобретением выполнено с возможностью обеспечения измерения общей вертикальности сосуда и/или горлышка сосуда и/или корпуса сосуда. Ниже будет описано измерение общей вертикальности сосуда, однако понятно, что специалист может использовать описание изобретения для измерений вертикальности корпуса или горлышка сосуда 2.
Согласно предпочтительному варианту осуществления устройство 1 содержит оптическое устройство, например, катоптрическое и/или призматическое устройство, установленное между камерой 22, наблюдающей дно, и контролируемым сосудом, чтобы оптимизировать поле, причем указанное устройство можно регулировать для его адаптации к диаметру сосуда.
Точно так же можно предусмотреть установку по меньшей мере одного оптического устройства между сосудом 2 и одной и/или другой из камер 21, 22, чтобы обеспечить камере телецентрическое наблюдение. Такое оптическое устройство с телецентрическим наблюдением можно применять самостоятельно или в комбинации с катоптрическим и/или призматическим оптическим устройством.
Разумеется, устройство в соответствии с изобретением может содержать один или несколько источников освещения любого типа, позволяющих камерам снимать изображения для обеспечения их анализа. Например, хорошо известным специалисту решением является подсветка или "back light", то есть однородный источник, находящийся противоположно камере относительно объекта, для реализации контроля размерности при помощи системы визуального контроля.
Если камера 21 является линейной, можно использовать, например, такую систему как «измеритель профиля» или микрометр, выпускаемый в продажу под названием "KEYENCE LS7000". Такие системы содержат для освещения источник, дающий параллельный пучок в виде плоского слоя, часто типа лазера. При этом датчик позволяет измерять размеры и положения затемненных частей слоя света без необходимости располагать классический объектив перед камерой.
Камерами 21, 22 управляет блок 12 обработки и анализа таким образом, чтобы по меньшей мере за половину оборота вращения сосуда 2 и при каждом инкременте вращения сосуда 2 камеры могли снять изображение Ibg левого края кольца, изображение Ibd правого края кольца и матричные изображения Img, Imd левой и правой пяток, левого и правого плеч и/или матричные изображения левого и правого оснований горлышка сосуда.
Блок 12 обработки анализирует при каждом инкременте вращения сосуда 2 изображение Ibg левого края кольца 8 и изображение Ibd правого края кольца 8, чтобы определить по меньшей мере координату XCr по поперечному положению реального положения Сr кольца 8.
Блок 12 обработки и анализа определяет поперечное положение реального положения кольца 8, анализируя изображения Ibg и Ibd, таким образом, чтобы определить соответствующие положения левого края bg кольца 8 и правого края bd кольца 8 (фиг. 4). На основании положений вдоль оси X левого bg и правого bd краев определяют реальное положение Cr кольца 8 в точке, зависящей от этих левого и правого краев. Например, выбирают среднюю точку между соответствующими положениями правого bd и левого bg краев таким образом, чтобы она соответствовала реальному положению Cr кольца. Необходимо отметить, что координату XCr положения вдоль поперечной оси реального положения Cr кольца 8 можно выбирать тем или иным способом относительно координат вдоль поперечной оси левого bg и правого bd краев.
Фиг. 5 иллюстрирует боковое перемещение XCr вдоль поперечной оси X реального положения Cr кольца в течение по меньшей мере одного оборота вращения сосуда 2.
Точно так же, при каждом инкременте вращения сосуда 2 блок 12 обработки анализирует матричное изображение Img левого края, чтобы определить координаты XTg, YTg в поперечном X и вертикальном Y направлениях левой точки Tg позиционирования, и матричное изображение Imd, чтобы определить координаты XTd, YTd в поперечном X и вертикальном Y направлениях правой точки Td позиционирования.
В целом считается, что левая Tg и правая Td точки позиционирования являются точками-ориентирами или точками идентификации положения соответственно левого и правого краев сосуда. Точки Td, Tg позиционирования можно выбирать любым способом относительно левого и правого краев сосуда 2. Необходимо отметить, что определение левой Tg и правой Td точек позиционирования в двух направлениях X, Y обеспечивает высокую точность измерения.
Согласно предпочтительному варианту осуществления устройство определяет левую Tg и правую Td точки позиционирования, выбирая их таким образом, чтобы они находились в опорной плоскости.
Согласно другому варианту осуществления левую Tg и правую Td точки позиционирования выбирают таким образом, чтобы они были симметричными относительно оси симметрии Y сосуда, оставляя между ними расстояние порядка диаметра опорной плоскости или сосуда 2 (фиг. 6).
Согласно предпочтительному варианту осуществления блок 12 обработки и анализа определяет левую Tg и правую Td точки позиционирования следующим образом.
Для каждого сосуда 2 в первом матричном изображении, соответственно в левом Img и правом Imd, определяют исходное положение левого края и правого края сосуда. Затем в каждом следующем левом Img и правом Imd матричном изображении блок 12 обработки и анализа выявляет форму соответственно правого и левого края сосуда, которая была охарактеризована в первом изображении, чтобы определить левую Tg и правую Td точки позиционирования.
Предпочтительно форму правого края и левого края сосуда в матричных изображениях характеризуют по меньшей мере по контуру М сосуда, проявляющемуся в матричном изображении (фиг. 7). Контур М образован совокупностью точек и/или сегментов и/или участков кривых. Следует отметить, что форму сосуда в изображениях можно характеризовать по всему или по части контура М и/или по всему или по части изображения, соответствующего этому контуру М.
Таким образом, блок 12 обработки и анализа выявляет контур М сосуда, охарактеризованный в первом матричном изображении, в каждом следующем изображении, стараясь наложить указанный контур М на контур, присутствующий в каждом следующем изображении, при помощи операций поступательного перемещения и/или вращения (фиг. 9, 10). Операцию наложения можно осуществлять при помощи любого другого метода "pattern matching", позволяющего совместить одну часть изображения с другой частью изображения.
Наложение контуров (или части изображений), присутствующих в каждом следующем изображении, относительно контура (или части изображения), охарактеризованного в первом изображении, позволяет определить для каждого из этих изображений положение левой Tg и правой Td точек позиционирования. На фиг. 8 представлен пример координаты XTd вдоль поперечной оси X правой точки Td позиционирования во время вращения по меньшей мере за один оборот сосуда 2.
При каждом инкременте вращения сосуда 2 блок 12 обработки определяет на перпендикуляре Р к сегменту прямой Т, проходящей через левую Tg и правую Td точки позиционирования, на определенном расстоянии h от сегмента прямой Т по меньшей мере координату XCt в поперечном направлении ожидаемого или теоретического положения Ct (фиг. 11). Понятно, что изменения координаты XCt теоретического положения Ct кольца зависят от изменений положения дна сосуда и, следовательно, от посадки сосуда 2.
Расстояние h соответствует реальной высоте сосуда. Эту высоту h реального положения кольца относительно сегмента прямой Т определяют для каждого типа сосуда 2 или для каждого сосуда 2 на основании измерения или выбранной константы. Эту высоту, которая, например, записана в памяти, учитывает блок 12 обработки по время обработки.
Разумеется, перпендикуляр Р берут в одинаковом месте на сегменте прямой Т для всех матричных изображений, соответствующих каждому инкременту вращения сосуда 2. Например, перпендикуляр Р берут в центре двух точек Tg, Td позиционирования.
Теоретическое положение Ct кольца сравнивают с реальным положением Cr кольца, определенным на основании изображений Ibg и Ibd кольца.
Блок 12 обработки анализирует изменения в поперечном направлении X координат реального положения Cr кольца и теоретического положения Ct кольца, учитываемых в течение по меньшей мере половины оборота сосуда, чтобы на основании изменения отклонения их положений вывести измерение вертикальности для сосуда.
Согласно предпочтительному варианту осуществления координату XCt в поперечном направлении X теоретического положения Ct при каждом инкременте 9 вращения сосуда 2 получают при помощи следующей формулы:
Для каждого инкремента вращения θ сосуда 2 вычисляют отклонение ΔХ между координатой XCr в поперечном направлении реального положения Cr кольца и координатой XCt в поперечном направлении X координаты теоретического положения Ct кольца.
Таким образом:
ΔХ(θ)=XCr(θ)-XCt(θ)
По меньшей мере для половины оборота вращения сосуда 2 анализируют изменение отклонения ΔХ, чтобы вывести из него измерение вертикальности.
Таким образом:

где V - значение вертикальности.
Как видно из фиг. 12, измерение вертикальности равно амплитуде кривой или псевдосинусоиды, на которой по меньшей мере за половину оборота вращения сосуда, и в поперечном направлении X показаны отклонения реального положения Cr кольца и теоретического положения Ct кольца. Иначе говоря, измерение вертикальности выводят из разности между минимальным (min на фиг. 12) и максимальным (max на фиг. 12) значениями отклонения ΔХ между координатами реального и теоретического положений кольца. Таким образом, если отклонение ΔХ между координатами реального и теоретического положений остается постоянным, значит вертикальность является идеальной (даже если отклонение ΔХ не равно нулю).
Разумеется, для уверенного наблюдения максимального (max) и минимального (min) значений отклонения ΔХ необходимо учитывать эти значения за поворот, намного превышающий половину оборота, и в идеале анализ осуществляют за полный оборот t.
Согласно другому варианту осуществления для повышения точности предпочтительно учитывают координаты в вертикальном направлении Y теоретического положения Ct кольца и реального положения Cr кольца. Согласно этому методу в изображении левого края и правого края кольца следует учитывать также вершину кольца, используя, например, метод "pattern matching".
Применение устройства визуального контроля в соответствии с изобретением напрямую вытекает из всего вышесказанного. Таким образом, способ состоит в следующем:
- при каждом инкременте θ вращения сосуда 2 по меньшей мере за половину оборота:
• снимают по меньшей мере одно изображение сосуда таким образом, чтобы получить изображение левого края Ibg кольца, изображение правого края Ibd кольца, матричное изображение левого края Img пятки, плеча и/или основания горлышка, матричное изображение правого края Imd соответственно пятки, плеча и/или основания горлышка,
• анализируют:
* изображение левого края кольца и изображение правого края кольца, чтобы определить по меньшей мере координату в поперечном направлении реального положения Cr кольца,
* матричное изображение левого края Img, чтобы определить координаты в поперечном и вертикальном направлениях левой точки позиционирования Tg (XTg, YTg),
* матричное изображение правого края Imd, чтобы определить координаты в поперечном и вертикальном направлениях правой точки позиционирования Td (XTd, YTd),
• на перпендикуляре Р к сегменту прямой Т, проходящей через левую Tg и правую Td точки позиционирования на определенном расстоянии от сегмента, определяют по меньшей мере координату в поперечном направлении теоретического положения Ct кольца,
- и на основании координат реального положения Cr кольца и теоретического положения Ct кольца, учитываемых в течение по меньшей мере половины оборота сосуда, из изменений отклонения их положения выводят измерение вертикальности для сосуда.
Изобретение не ограничивается различными описанными и представленными на фигурах примерами, и в него можно вносить различные изменения, не выходя за рамки объема его защиты.
Группа изобретений относится к технической области контроля полых объектов. В способе измерения вертикальности на приводимом во вращение сосуде снимают по меньшей мере одно изображение сосуда таким образом, чтобы получить изображение левого края кольца, изображение правого края кольца, матричное изображение левого края (Img) пятки, плеча и/или основания горлышка, матричное изображение правого края (Imd) соответственно пятки, плеча и/или основания горлышка, анализируют: изображение левого края кольца и изображение правого края кольца, чтобы определить реальное положение кольца, матричное изображение левого и правого краев, чтобы определить левую точку позиционирования Tg и правую точку позиционирования Td, определяют на перпендикуляре к сегменту прямой, проходящей через левую и правую точки позиционирования, теоретическое положение кольца и выводят на основании изменений отклонения между реальным положением кольца и теоретическим положением кольца измерение вертикальности для сосуда. Технический результат заключается в повышении точности измерения вертикальности сосудов. 2 н. и 13 з.п. ф-лы, 12 ил.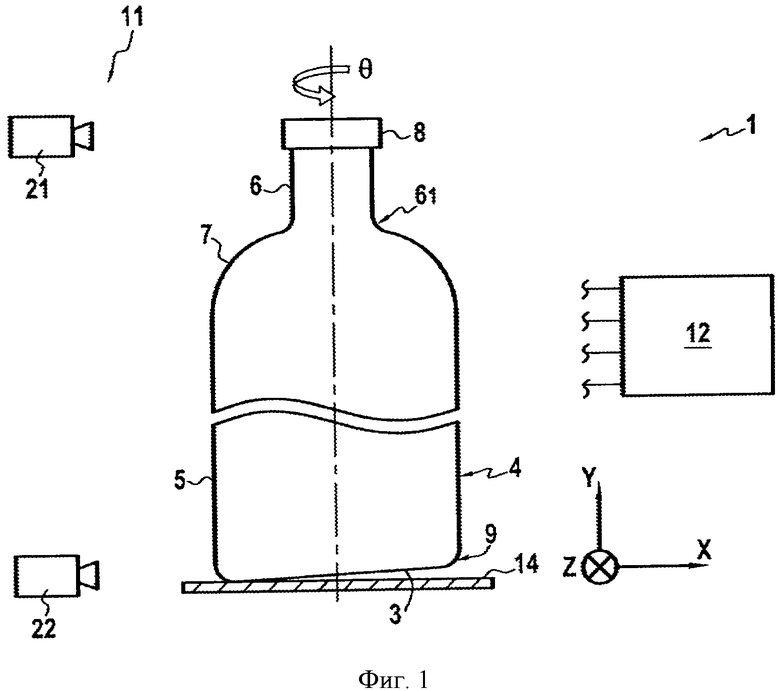
1. Способ измерения вертикальности на сосуде (2), опирающемся на опорную поверхность и имеющем кольцо (8) и дно (3), от которого поднимается вертикальная стенка (4), сопряженная с дном через пятку (9), при этом вертикальная стенка (4) имеет горлышко, оснащенное или не оснащенное в своем основании плечом, при этом способ включает:
- приведение во вращение сосуда (2) вокруг вертикальной оси (Y), близкой к оси симметрии изделия,
- расположение с одной стороны сосуда по меньшей мере одной камеры, которая выдает последовательность изображений сосуда по меньшей мере за половину оборота, оптическая ось (Z) наблюдения которой является по существу ортогональной к вертикальной оси (Y) сосуда и боковое поле которой простирается в поперечном направлении (X), ортогональном к вертикальной оси (Y) и к оптической оси (Z),
отличающийся тем, что:
- определяют реальную высоту (h) сосуда,
- при этом при каждом инкременте (θ) вращения сосуда (2) по меньшей мере за половину оборота:
- снимают по меньшей мере одно изображение сосуда так, чтобы получить изображение левого края (Ibg) кольца, изображение правого края (Ibd) кольца, матричное изображение левого края (Img) пятки, плеча и/или основания горлышка, матричное изображение правого края (Imd) соответственно пятки, плеча и/или основания горлышка,
- анализируют:
- изображение левого края кольца и изображение правого края кольца, чтобы определить по меньшей мере координату в поперечном направлении реального положения (Cr) кольца,
- матричное изображение левого края, чтобы определить координаты в поперечном и вертикальном направлениях левой точки позиционирования Tg (XTg, YTg),
- матричное изображение правого края, чтобы определить координаты в поперечном и вертикальном направлениях правой точки позиционирования Td (XTd, YTd),
- определяют на перпендикуляре (Р) к сегменту прямой (Т), проходящей через левую (Tg) и правую (Td) точки позиционирования на реальной высоте (h) сосуда, взятой от указанного сегмента прямой (Т), по меньшей мере координату в поперечном направлении теоретического положения (Ct) кольца,
- и на основании координат реального положения (Cr) кольца и теоретического положения (Ct) кольца, учитываемых в течение по меньшей мере половины оборота сосуда, из изменений отклонения их положения выводят показание вертикальности для сосуда.
2. Способ по п. 1, отличающийся тем, что в качестве левого и правого матричных изображений снимают матричные изображения пятки, плеча и/или основания горлышка, чтобы измерить вертикальность горлышка сосуда, корпуса сосуда и/или общую вертикальность.
3. Способ по п. 1, отличающийся тем, что при каждом инкременте вращения определяют реальное положение (Cr) кольца, анализируя линейное или матричное изображение, содержащее в поперечном направлении все кольцо, определяя соответствующие положения правого края и левого края кольца и вычисляя точку, зависящую от этих двух краев.
4. Способ по п. 1, отличающийся тем, что для каждого сосуда:
- характеризуют форму и исходное положение левого края и правого края сосуда в первом соответственно левом и правом матричном изображении, снятом во время вращения сосуда,
- выявляют в каждом следующем соответственно левом и правом матричном изображении, снятом во время вращения сосуда, форму соответственно левого и правого края сосуда, охарактеризованную в первом изображении, чтобы определить левую и правую точки позиционирования.
5. Способ по п. 4, отличающийся тем, что определяют левую и правую точки позиционирования в исходном изображении, выбирая их таким образом, чтобы они были симметричными относительно оси симметрии сосуда, оставляя между ними расстояние порядка диаметра опорной плоскости или сосуда.
6. Способ по п. 5, отличающийся тем, что определяют левую и правую точки позиционирования в исходном изображении, выбирая их так, чтобы они находились в опорной плоскости.
7. Способ по одному из пп. 3-6, отличающийся тем, что характеризуют форму правого края и левого края сосуда при помощи по меньшей мере контура сосуда, проявляющегося в матричном изображении и описанного совокупностью точек, и/или сегментов, и/или участков кривых, и в каждом следующем изображении выявляют по меньшей мере контур, охарактеризованный в первом изображении, стараясь наложить по меньшей мере указанный контур на контур, присутствующий в каждом следующем изображении, при помощи операций поступательного перемещения и/или вращения.
8. Способ по п. 1, отличающийся тем, что для каждого типа сосуда определяют расстояние (h) теоретического положения (Ct) кольца по отношению к сегменту прямой на основании измерения или определенной константы.
9. Способ по п. 1, отличающийся тем, что снимают изображение левого края и изображение правого края, включая наблюдение верхнего края сосуда, чтобы определить высоту сосуда.
10. Устройство для измерения вертикальности на сосуде (2), имеющем кольцо (8) и дно (3), от которого поднимается вертикальная стенка (4), сопряженная с дном через пятку (9), при этом вертикальная стенка (4) имеет горлышко, оснащенное или не оснащенное в своем основании плечом, при этом устройство содержит:
- систему приведения во вращение сосуда (2) вокруг его вертикальной оси (Y) симметрии,
- по меньшей мере одну камеру, которая расположена сбоку от сосуда и которая выдает последовательность изображений сосуда по меньшей мере за половину оборота, оптическая ось (Z) наблюдения которой является по существу ортогональной к вертикальной оси (Y) сосуда и боковое поле которой простирается в поперечном направлении (X), ортогональном к вертикальной оси (Y) и к оптической оси (Z),
- блок записи последовательностей изображений сосудов,
- блок анализа изображений и последовательностей изображений, поступающих по меньшей мере от одной камеры, соединенный с блоком записи,
отличающееся тем, что:
- для каждого инкремента (θ) вращения по меньшей мере одна камера снимает по меньшей мере одно изображение левого (Ibg) и правого (Ibd) краев кольца, левое матричное изображение (Img) пятки, плеча и/или основания горлышка, правое матричное изображение (Imd) соответственно пятки, плеча и/или основания горлышка изделия,
- блок обработки:
- выполнен с возможностью анализа:
- изображения левого края (Ibg) кольца и изображения правого края (Ibd) кольца, чтобы определить по меньшей мере координату в поперечном направлении (X) реального положения (Cr) кольца,
- матричного изображение левого края (Img), чтобы определить координаты в поперечном (X) и вертикальном (Y) направлениях левой точки позиционирования Tg (XTg, YTg),
- матричного изображения правого края (Imd), чтобы определить координаты в поперечном (X) и вертикальном (Y) направлениях правой точки позиционирования Td (XTd, YTd),
- учета реальной высоты (h) сосуда,
- определения на перпендикуляре (Р) к сегменту прямой (Т), проходящей через левую и правую точки позиционирования, на реальной высоте (h) сосуда, взятой от указанного сегмента прямой (Т), по меньшей мере координату в поперечном направлении теоретического положения (Ct) кольца,
- анализа координаты реального положения (Cr) кольца и теоретического положения (Ct) кольца, учитываемых в течение по меньшей мере половины оборота сосуда, чтобы на основании изменений разности их положения вывести измерение вертикальности для сосуда.
11. Устройство по п. 10, отличающееся тем, что содержит линейную камеру (21), решетка которой расположена в плоскости, перпендикулярной к оси вращения и секущей кольцо сосуда ниже его вершины так, чтобы передавать в блок анализа при каждом инкременте вращения горизонтальный разрез кольца, в котором выделяются два края кольца.
12. Устройство по п. 10, отличающееся тем, что содержит матричную камеру (21), оптическая ось наблюдения которой проходит вблизи вертикальной оси изделия и под вершиной или включая вершину кольца так, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение кольца.
13. Устройство по п. 10, отличающееся тем, что содержит матричную камеру (21), оптическая ось наблюдения которой проходит вблизи вертикальной оси изделия и над дном сосуда так, чтобы обе пятки, правая и левая, постоянно находились в ее поле наблюдения, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение обеих пяток.
14. Устройство по одному из пп. 10-13, отличающееся тем, что содержит оптическое, например катоптрическое и/или призматическое, устройство, установленное между камерой, наблюдающей дно, и контролируемым изделием так, чтобы оптимизировать поле, при этом указанное устройство является регулируемым для его адаптации к диаметру сосуда.
15. Устройство по п. 10, отличающееся тем, что содержит две синхронные матричные камеры, соответствующие оптические оси наблюдения которых являются ортогональными к вертикальной оси сосуда и находятся над дном сосуда, при этом поле первой камеры содержит только правую пятку, а поле другой камеры - левую пятку, чтобы передавать в блок анализа при каждом инкременте вращения матричное изображение для каждой пятки.
| FR 2973501 A1, 05.10.2012 | |||
| US 5917602 A, 29.06.1999 | |||
| US 6903814 B1, 07.06.2005 | |||
| US 2011141265 A1, 16.06.2011 | |||
| RU 99100290 A, 10.10.2000. |

