Область техники, к которой относится изобретение
Настоящее изобретение относится к мобильной станции и к базовой станции в системе мобильной связи, например, в системе LTE. Более конкретно, настоящее изобретение относится к способу управления передачей и приемом сигналов между мобильной станцией и базовой станцией в системе мобильной связи, использующей режим DRX.
Уровень техники
В системе LTE (Long Term Evolution, долгосрочное развитие), стандартизированной консорциумом 3GPP (3rd Generation Partnership Project, Партнерство по разработке сетей мобильной связи третьего поколения), с целью снижения потребления мобильной станцией (UE) энергии от аккумулятора используется управление с прерывистым приемом (Discontinuous Reception, DRX; см., например, непатентный документ 1), при котором, если в течение заранее определенного периода или дольше отсутствуют данные, подлежащие передаче/ приему мобильной станцией, то эта мобильная станция принимает нисходящий канал управления (Physical Downlink Control Channel, PDCCH, физический нисходящий канал управления), передаваемый из базовой станции (eNB), с перерывами, только в конкретный период. Более конкретно, мобильная станция может находиться в активном состоянии или в неактивном состояние на основании состояния RRC Connected мобильной станции, меняемого на состояние DRX в ходе управления с DRX.
Мобильная станция в активном состоянии отслеживает PDCCH и передает в базовую станцию информацию CSI/SRS (Channel State Information, информация о состоянии канала; Sounding Reference Signal: зондирующий опорный сигнал - опорный сигнал для измерения качества восходящего канала); иными словами, мобильная станция выполняет сообщение CSI/SRS. CSI содержит информацию о качестве канала (channel quality information, CQI), индикатор матрицы предварительного кодирования (precoding matrix indicator, PMI), индикатор ранга (rank indicator, RI) и т.п.
С другой стороны, мобильная станция в неактивном состоянии не отслеживает PDCCH и не передает CSI/SRS, в результате чего потребление мобильной станцией энергии от аккумулятора может быть снижено. Время пребывания в активном состоянии также называется активным периодом (временем активности).
Одним из триггеров для перехода мобильной станции в неактивное состояние может служить истечение периода таймера неактивности DRX (drx-InactivityTimer). Еще одним триггером перехода в неактивное состояние может служить прием мобильной станцией команды DRX «МАС Control Elemenb (элемент управления уровня MAC), далее называемой командой DRX «МАС СЕ», переданной из базовой станции (при приеме мобильной станцией команды DRX «МАС СЕ» таймер неактивности DRX принудительно останавливается). В то же время триггером перехода мобильной станции в активное состояние может служить передача из мобильной станции в базовую станцию запроса планирования (ЗП, scheduling request, SR), выполняемая при появлении в мобильной станции восходящих данных пользователя, с целью запроса планирования восходящей линии связи для указанной мобильной станции.
Документ известного уровня техники
Непатентные документы:
Непатентный документ 1: 3GPP TS 36.321
Непатентный документ 2: 3GPP Specification Change Request records for 36.321; R2-130844
Однако при обычном управлении с DRX в вышеупомянутых операциях с CSI/SRS имеют место следующие недостатки.
Во-первых, имеет место недостаток, состоящий в том, что когда в мобильной станции, находящейся в активном состоянии, активный период внезапно продлевается, эта мобильная станция не может передать CSI/SRS (CSI или SRS), а когда активный период внезапно заканчивается, мобильная станция не может остановить передачу CSI/SRS. В отношении базовой станции, поскольку могут иметь место подобные ситуации, в которых CSI/SRS из мобильной станции передается или не передается, имеет место недостаток, состоящий в том, что нагрузка по обработке, требуемая для обслуживания обеих ситуаций, возрастает. Далее с использованием фиг. 1А и 1В более конкретно рассматривается пример таких ситуаций.
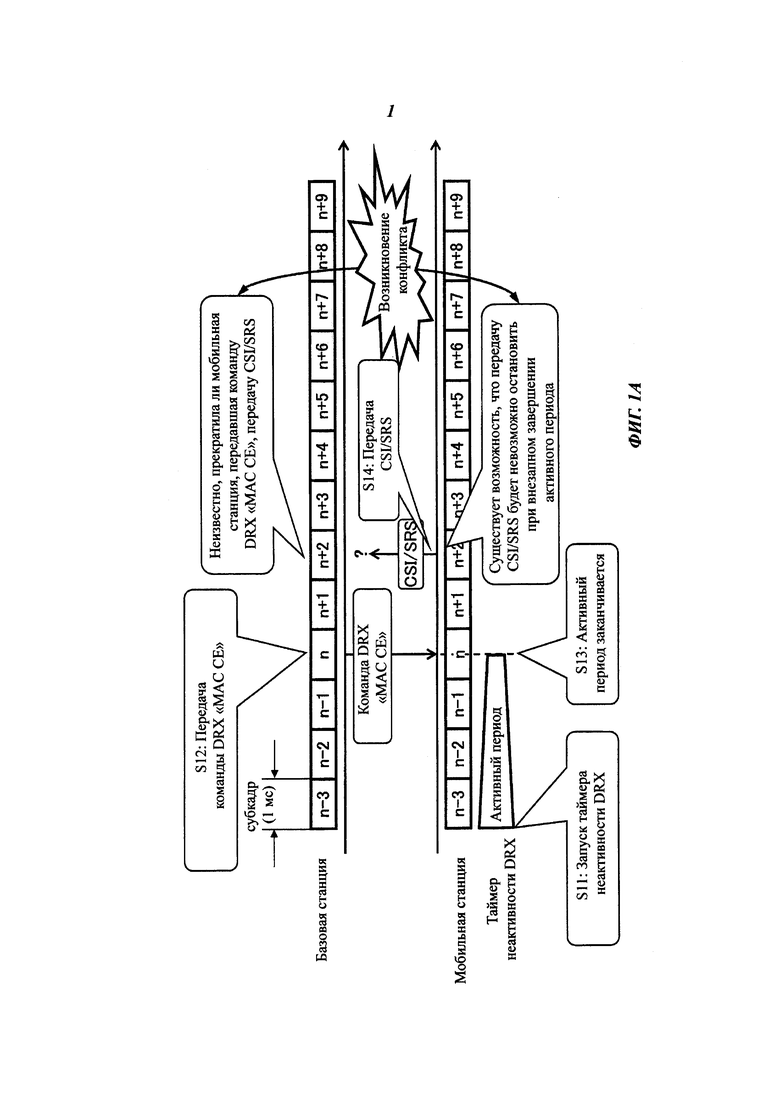
Фиг. 1А представляет собой схему функционирования мобильной станции и базовой станции при управлении с DRX. На фиг. 1А и 1В субкадр (1 мс) обозначен номером n (n-3 - n+9). Как показано на фиг. 1А, вначале в мобильной станции запускается таймер неактивности DRX (S11). Затем базовая станция передает в мобильную станцию команду DRX «МАС СЕ» для смены состояния DRX мобильной станции на неактивное состояние (S12). Мобильная станция, приняв команду DRX «МАС СЕ», останавливает таймер неактивности DRX с целью завершения активного периода (S13).
Поскольку при приеме команды DRX «МАС СЕ» в мобильной станции активный период внезапно заканчивается, существует вероятность того, что мобильная станция не сможет незамедлительно остановить передачу CSI/SRS. Соответственно, мобильная станция передаст CSI/SRS в базовую станцию (S14). С другой стороны, базовой станции неизвестно, остановила ли мобильная станция, в которую на шаге S12 была передана команда DRX «МАС СЕ», операцию передачи CSI/SRS. Иными словами, имеет место недостаток, состоящий в возникновении конфликта (несоответствия), поскольку ожидаемое функционирование при работе с CSI/SRS в базовой станции и в мобильной станции различно, или поскольку функционирование при работе с CSI/SRS не может быть взаимно определено для каждой из сторон.
Возникновение конфликта порождает последствия, в которых, например, если при ожидании базовой станцией передачи CSI/SRS из мобильной станции CSI/SRS из мобильной станции не передается, то базовая станция будет декодировать в операции определения качества линии связи с мобильной станцией шумы, помехи и т.п., тем самым используя их в определении качества канала, вследствие чего точность определения снижается. Если же, например, CSI/SRS передается из мобильной станции, когда базовая станция не ожидает передачи CSI/SRS из мобильной станции, имеет место эффект возникновения помехи вследствие конфликта CSI/SRS с восходящим сигналом, передаваемым из другой мобильной станции.
Соответственно, чтобы избежать возникновения вышеуказанного конфликта, предлагается операция, называемая здесь «способом n-4» (см., например, непатентный документ 2) и предназначенная для прогнозирования состояния мобильной станции после истечения 4 мс с целью принятия решения о том, следует ли через 4 мс передавать CSI/SRS, выполняемого в каждом периоде (субкадре (TTI)) на основании состояния и информации (например, о нахождении или ненахождении в активном состоянии) мобильной станции. При этом, даже если в периоде от момента времени субкадра n-4 до субкадра n, соответствующего истечению 4 мс, произойдет событие, которое к моменту времени субкадра n вызовет смену состояния мобильной станции, решение о необходимости передачи CSI/SRS в момент времени субкадра n будет, приниматься на основании определения, выполненного в момент времени субкадра n-4.
В способе n-4 в случае, если состоянием (ожидаемым состоянием) мобильной станции через 4 мс (то есть в субкадре n), ожидавшемся в момент времени субкадра n-4, является активное состояние, то в момент времени субкадра n мобильная станция выполняет операцию передачи CSI/SRS, а базовая станция выполняет операцию приема. Если же предполагаемым состоянием мобильной станции через 4 мс (то есть в субкадре n), ожидавшемся в момент времени субкадра n-4, не является активное состояние (мобильная станция находится в неактивном состоянии), то в момент времени субкадра n мобильная станция не выполняет операцию передачи CSI/SRS, а базовая станция не выполняет операцию приема.
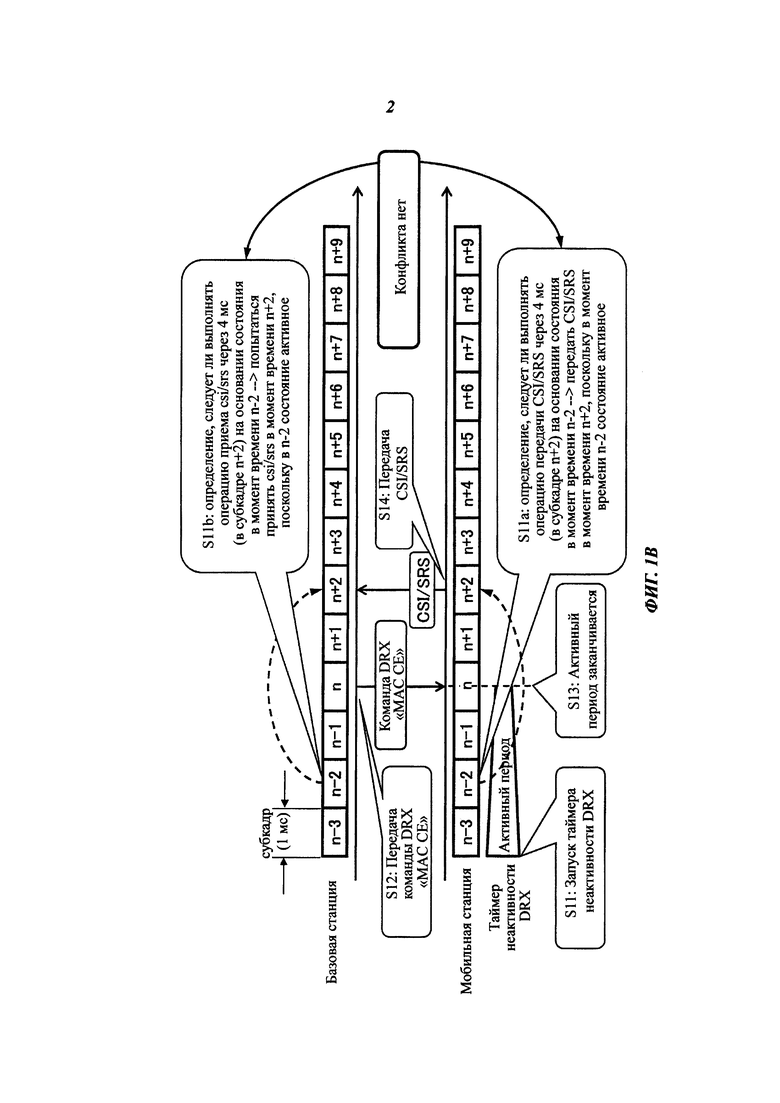
Далее с использованием фиг. 1В описывается конкретное функционирование в соответствии со способом n-4. Фиг. 1В представляет собой схему функционирования мобильной станции и базовой станции при управлении с DRX с использованием способа n-4. Как показано на фиг. 1В, в качестве операции принятия решения способа n-4 мобильная станция определяет, следует ли выполнять операцию передачи CSI/SRS через 4 мс (в субкадре n+2), на основании состояния, ожидаемого через 4 мс в момент времени субкадра n-2 (S11a). В примере на фиг. 1В мобильная станция в момент времени субкадра n-2 может спрогнозировать, что состоянием через 4 мс будет активный период, т.е. будет иметь место активное состояние. Соответственно, мобильная станция управляется таким образом, чтобы в момент времени субкадра n+2 CSI/SRS передавался. Аналогично, базовая станция определяет, следует ли выполнять операцию передачи CSI/SRS через 4 мс (в субкадре n+2), на основании состояния, ожидаемого через 4 мс в момент времени субкадра n-2 (S11b).
В примере на фиг. 1В, поскольку базовая станция не передает команду DRX «МАС СЕ» в момент времени субкадра n-2, базовая станция определяет, что состоянием мобильной станции в субкадре n+2 является активное состояние, и базовая станция управляется таким образом, чтобы в момент времени субкадра n+2 предпринималась попытка приема CSI/SRS. Затем мобильная станция передает CSI/SRS в базовую станцию на основании результата определения, выполненного на шаге S11a (S14). Соответственно, при использовании способа n-4 в управлении с DRX необходимость выполнения операции передачи/ приема CSI/SRS в мобильной станции/ базовой станции в момент времени субкадра n+4 определяется на основании состояния мобильной станции в момент времени субкадра n. Таким образом, можно избежать возникновения конфликта, проиллюстрированного на фиг. 1А.
Однако при выполнении операции передачи запроса планирования (ЗП, Scheduling Request, SR) при управлении с DRX имеет место ситуация, в которой вышеуказанный недостаток не устраняется даже при использовании способа n-4. Конкретное функционирование описывается со ссылкой на фиг. 2А и 2В. Фиг. 2А и 2В представляют собой схемы, иллюстрирующие функционирование мобильной станции и базовой станции при инициировании ЗП в управлении с DRX, использующем способ n-4.
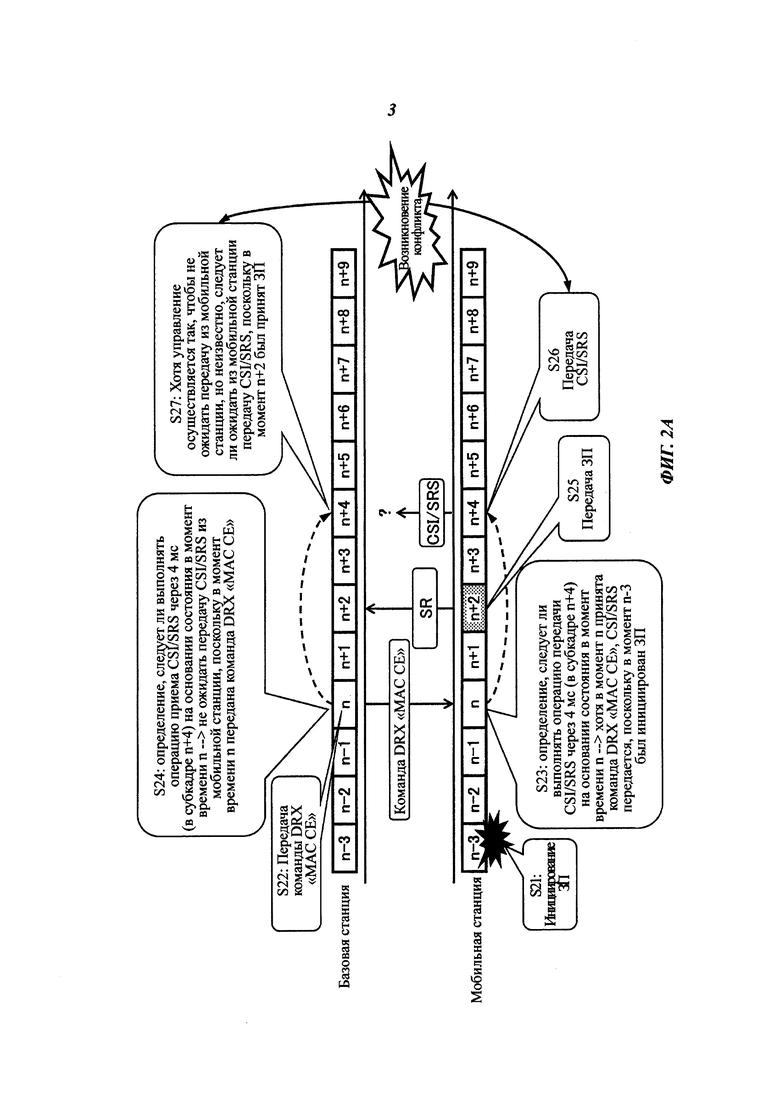
На фиг. 2А показано функционирование в случае, когда операция принятия решения о передаче (приеме) CSI/SRS в соответствии со способом n-4 выполняется после инициирования ЗП в мобильной станции. После инициирования ЗП в мобильной станции ЗП передается из мобильной станции в базовую станцию после истечения заранее определенного времени. Вначале ЗП инициируется в мобильной станции (S21). Затем базовая станция передает команду DRX «МАС СЕ» в целевую мобильную станцию с целью смены состояния DRX мобильной станции на неактивное состояние (S22). Далее, в качестве операции определения в способе n-4, мобильная станция на основании состояния в момент времени субкадра n определяет, следует ли через 4 мс (в субкадре n+4) выполнить операцию передачи CSI/SRS (S23).
В примере на фиг. 2А, поскольку в момент времени субкадра n мобильная станция приняла команду DRX «МАС СЕ», активный период завершается. Однако поскольку в момент времени субкадра n-3 был инициирован ЗП (до операции определения в способе n-4), запланирован переход в активное состояние после передачи ЗП, так что мобильная станция управляется таким образом, чтобы выполнить операцию передачи CSI/SRS. Аналогично, базовая станция на основании состояния в момент времени субкадра n определяет, следует ли выполнить операцию приема сигналов CSI/SRS через 4 мс (субкадр n+4) (S24). В примере на фиг. 2А, поскольку в момент времени субкадра n базовая станция передает команду DRX «МАС СЕ», базовая станция определяет, что состоянием мобильной станции не является активное состояние, поэтому базовая станция управляется таким образом, чтобы не ожидать передачу сигналов CSI/SRS из мобильной станции в момент времени субкадра n+4.
Далее ЗП передается из мобильной станции в базовую станцию на основании указанного инициирования на шаге S21 (S25). Затем мобильная станция передает CSI/SRS в базовую станцию на основании операции определения на шаге S23 (S26). С другой стороны, базовая станция на основании операции определения на шаге S24 управлялась таким образом, чтобы не ожидать передачу сигналов CSI/SRS из мобильной станции. Однако поскольку в момент времени субкадра n+2 базовая станция принимает ЗП, имеется неопределенность в том, ожидать или не ожидать передачу сигналов CSI/SRS из мобильной станции. Иными словами, может иметь место недостаток, при котором возникает конфликт, поскольку ожидаемое функционирование в операции передачи/ приема CSI/SRS различно для мобильной станции и базовой станции, или функционирование при передаче CSI/SRS не может быть определено.
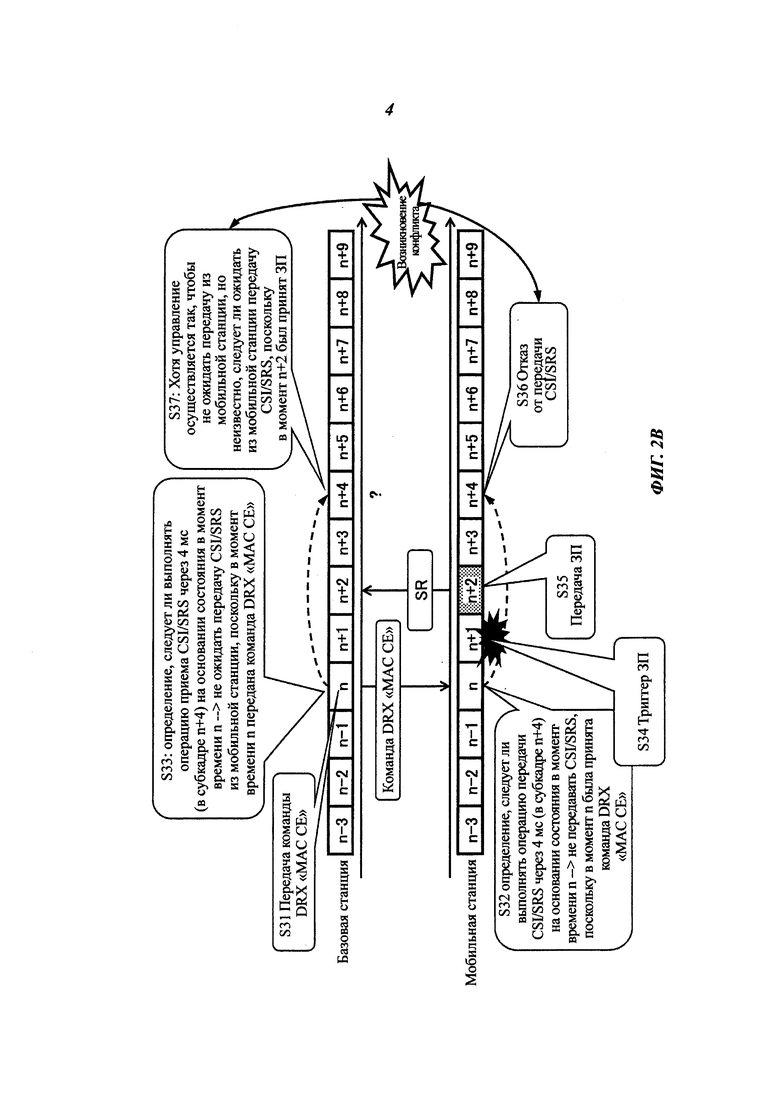
Кроме того, на фиг. 2 В представлено функционирование в случае, когда ЗП инициирован в мобильной станции после выполнения операции определения в отношении передачи (приема) CSI/SRS в соответствии со способом n-4. В этом случае в качестве операции определения в способе n-4 мобильная станция на основании состояния в момент времени субкадра n определяет, следует ли через 4 мс (в субкадре n+4) выполнить операцию передачи CSI/SRS (S32).
В примере на фиг. 2В, поскольку в момент времени субкадра n мобильная станция приняла команду DRX «МАС СЕ», мобильная станция завершает активный период и выполняет управление таким образом, чтобы не выполнять операцию передачи CSI/SRS. Затем в мобильной станции инициируется ЗП (S34) и выполняется передача ЗП (S35). При этом мобильная станция в момент времени, когда выполняется операция определения в соответствии со способом n-4 (в субкадре n), не может обнаружить, что на основании передачи ЗП запланирован переход в активное состояние. Соответственно, CSI/SRS из мобильной станции не передается (S36). Функционирование базовой станции аналогично случаю на фиг. 2А. Следовательно, существует ситуация, в которой имеет место недостаток, аналогичный показанному на фиг. 2А.
Раскрытие изобретения
Настоящее изобретение сделано с учетом вышеизложенного, и целью настоящего изобретения является предотвращение конфликта функционирования между мобильной станцией, передающей CSI/SRS, т.е. информацию о качестве, и базовой станцией, ожидающей CSI/SRS, в системе мобильной связи, использующей управление с DRX.
Для устранения вышеуказанного недостатке мобильная станция настоящего изобретения представляет собой мобильную станцию, осуществляющую связь с базовой станцией, содержащую средства, определяющие, следует ли после истечения заранее определенного времени передавать в базовую станцию информацию о качестве, указывающую качество радиосвязи, на основании состояния мобильной станции, активного или нет, при управлении с прерывистым приемом; и
средства, передающие информацию о качестве после истечения заранее определенного времени, даже если определено не передавать информацию о качестве на основании указанного определения, в случае, если до истечения заранее определенного времени в базовую станцию передан запрос планирования.
Кроме того, мобильная станция настоящего изобретения может представлять собой мобильную станцию, осуществляющую связь с базовой станцией, содержащую:
средства, определяющие, следует ли после истечения заранее определенного времени передавать в базовую станцию информацию о качестве, указывающую качество радиосвязи, на основании состояния мобильной станции, активного или нет, при управлении с прерывистым приемом; и
средства, управляющие передачей информации о качестве на основании результата указанного определения;
причем, если определено не передавать информацию о качестве на основании указанного определения, то мобильная станция не передает информацию о качестве, даже если из мобильной станции передан запрос планирования.
Базовая станция настоящего изобретения может представлять собой базовую станцию, осуществляющую связь с мобильной станцией, содержащую
средства, определяющие, следует ли ожидать информацию о качестве, указывающую качество радиосвязи, передаваемую из мобильной станции, после истечения заранее определенного времени на основании состояния мобильной станции, активного или нет, при управлении с прерывистым приемом; и
средства управления, осуществляющие управление таким образом, что при приеме из мобильной станции запроса планирования до истечения указанного заранее определенного времени после определения не ожидать информацию о качестве на основании указанного определения, первая информация о качестве, которая должна быть передана из мобильной станции после приема запроса планирования, не ожидается.
Технический результат
В соответствии с настоящим изобретением, можно избежать возникновения конфликта функционирования между мобильной станцией, передающей CSI/SRS, т.е. информацию о качестве, и базовой станцией, ожидающей приема CSI/SRS, даже в случае передачи из мобильной станции в базовую станцию запроса планирования в системе мобильной связи, использующей управление с DRX.
Краткое описание чертежей
Фиг. 1А представляет собой схему функционирования мобильной станции и базовой станции в управлении DRX.
Фиг. 1В представляет собой схему функционирования мобильной станции и базовой станции в управлении DRX.
Фиг. 2А представляет собой схему функционирования мобильной станции и базовой станции в случае, когда в управлении с DRX, использующем способ n-4, инициируется ЗП.
Фиг. 2В представляет собой схему функционирования мобильной станции и базовой станции в случае, когда в управлении с DRX, использующем способ n-4, инициируется ЗП.
Фиг. 3 представляет собой функциональную схему системы мобильной связи в варианте осуществления настоящего изобретения.
Фиг. 4 представляет собой функциональную схему мобильной станция UE в варианте осуществления настоящего изобретения.
Фиг. 5 представляет собой функциональную схему базовой станции eNB в варианте осуществления настоящего изобретения.
Фиг. 6А представляет собой схему содержания операции в первом варианте осуществления.
Фиг. 6В представляет собой схему содержания операции в первом варианте осуществления.
Фиг. 7 представляет собой блок-схему примера операции мобильной станции UE в первом варианте осуществления.
Фиг. 8А представляет собой схему содержания операции во втором варианте осуществления.
Фиг. 8В представляет собой схему содержания операции во втором варианте осуществления.
Фиг. 9 представляет собой блок-схему примера операции мобильной станции UE во втором варианте осуществления.
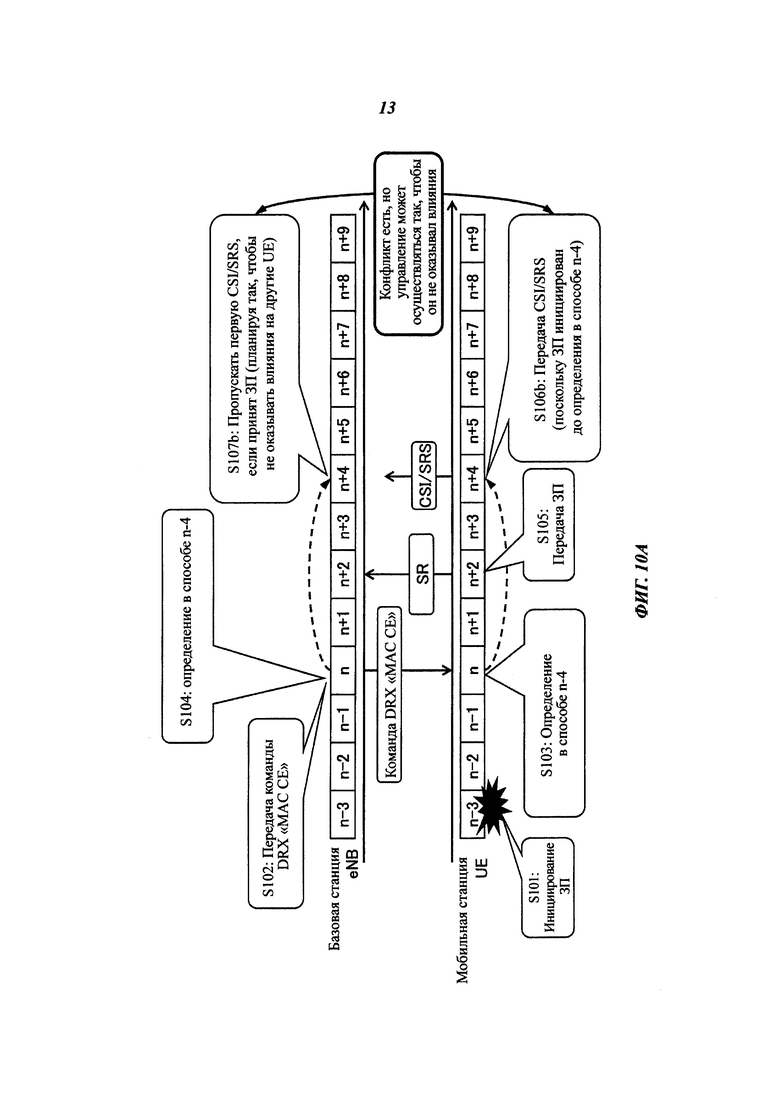
Фиг. 10А представляет собой схему содержания операции в третьем варианте осуществления.
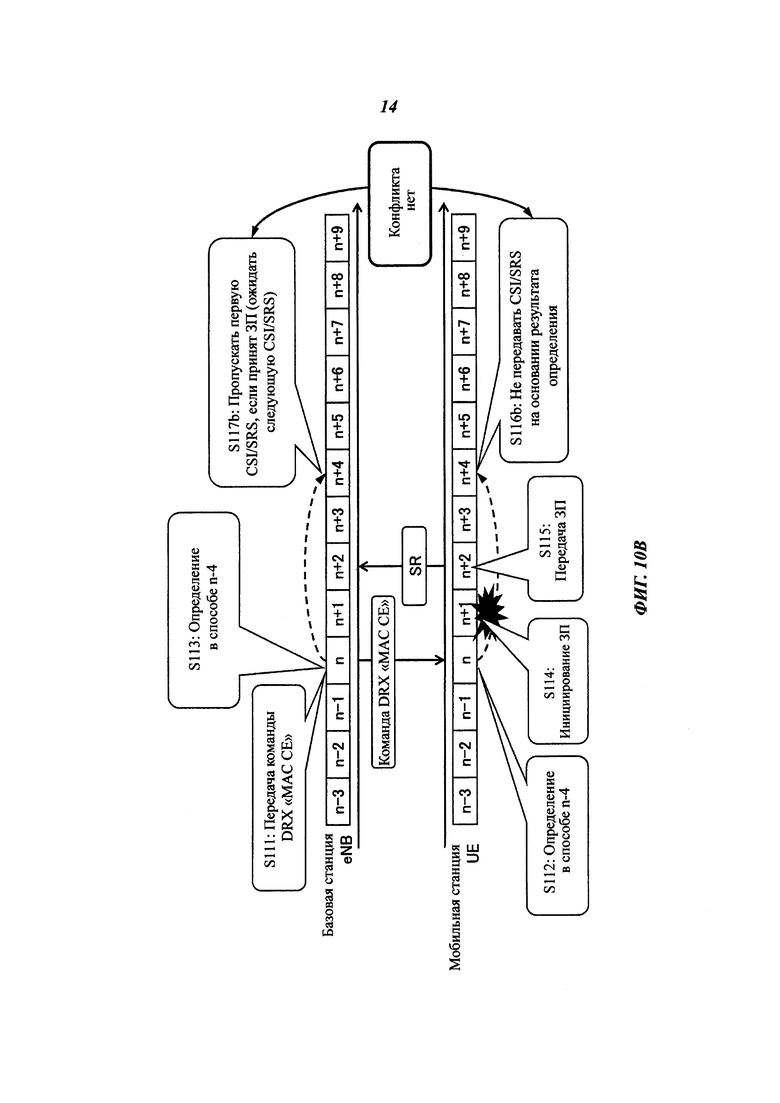
Фиг. 10В представляет собой схему содержания операции в третьем варианте осуществления.
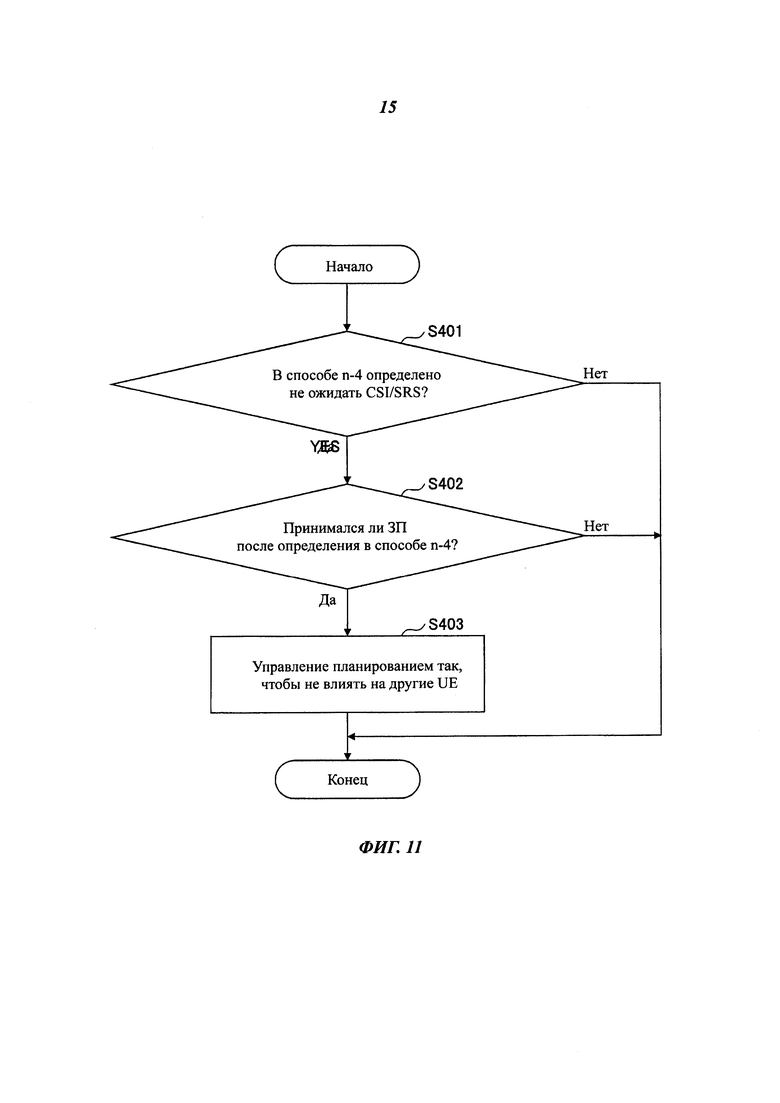
Фиг. 11 представляет собой блок-схему примера операции базовой станции eNB в третьем варианте осуществления.
Осуществление изобретения
Далее со ссылкой на чертежи описываются варианты осуществления настоящего изобретения (варианты осуществления). Варианты осуществления, описываемые далее, представляют собой лишь примеры, и варианты осуществления, к которым применимо настоящее изобретение, не ограничены приведенными вариантами. Например, далее в качестве примера системы мобильной связи используется система LTE, но настоящее изобретение может быть использовано и в других системах.
Конфигурация системы
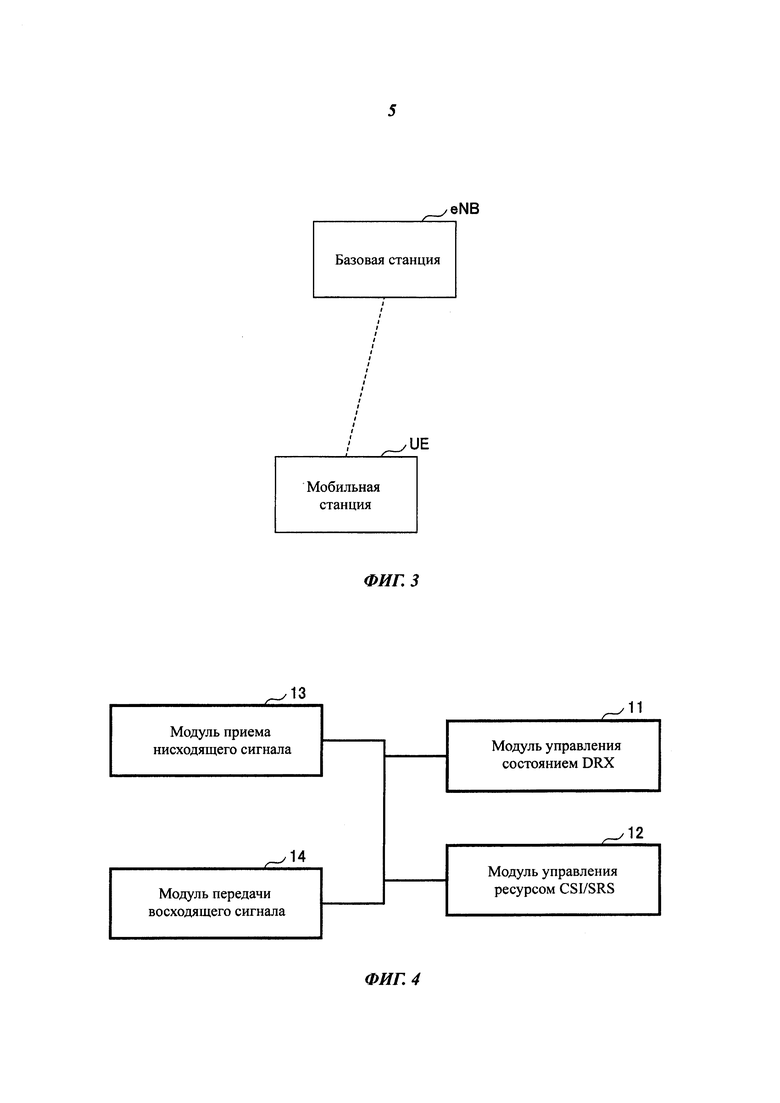
Фиг. 3 представляет собой функциональную схему системы мобильной связи в варианте осуществления настоящего изобретения. Как показано на фиг. 3, система мобильной связи в варианте осуществления настоящего изобретения представляет собой систему связи согласно схеме LTE, содержащую базовую станцию eNB и мобильную станцию UE.
Базовая станция eNB передает в мобильную станцию UE каналы PDCCH, PDSCH, P-HICH (Physical HARQ Indicator Channel, физический канал индикатора HARQ) и т.п.
Кроме того, мобильная станция UE передает в базовую станцию eNB каналы PUSCH (Physical Uplink Shared Channel, физический восходящий общий канал), PUCCH и PRACH (Physical Random Access Channel, физический канал произвольного доступа).
Базовая станция eNB передает в мобильную станцию UE нисходящую информацию (например, нисходящие данные пользователя) через канал DL-SCH, отображаемый на PDSCH. Мобильная станция UE передает в базовую станцию eNB восходящую информацию (например, восходящие данные пользователя) через канал UL-SCH, отображаемый на PUSCH.
Кроме того, мобильная станция UE передает в базовую станцию eNB информацию управления, например, определенный в 3GPP запрос планирования (ЗП, scheduling request, SR).
Функциональная конфигурация
Мобильная станция UE
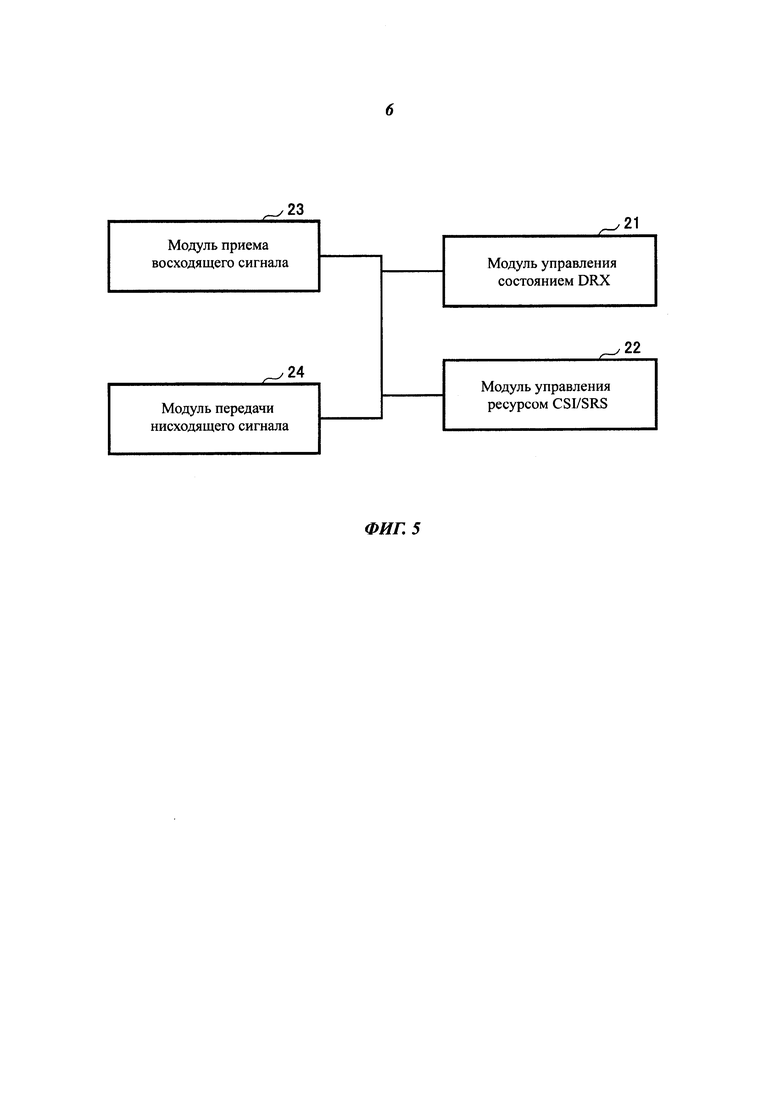
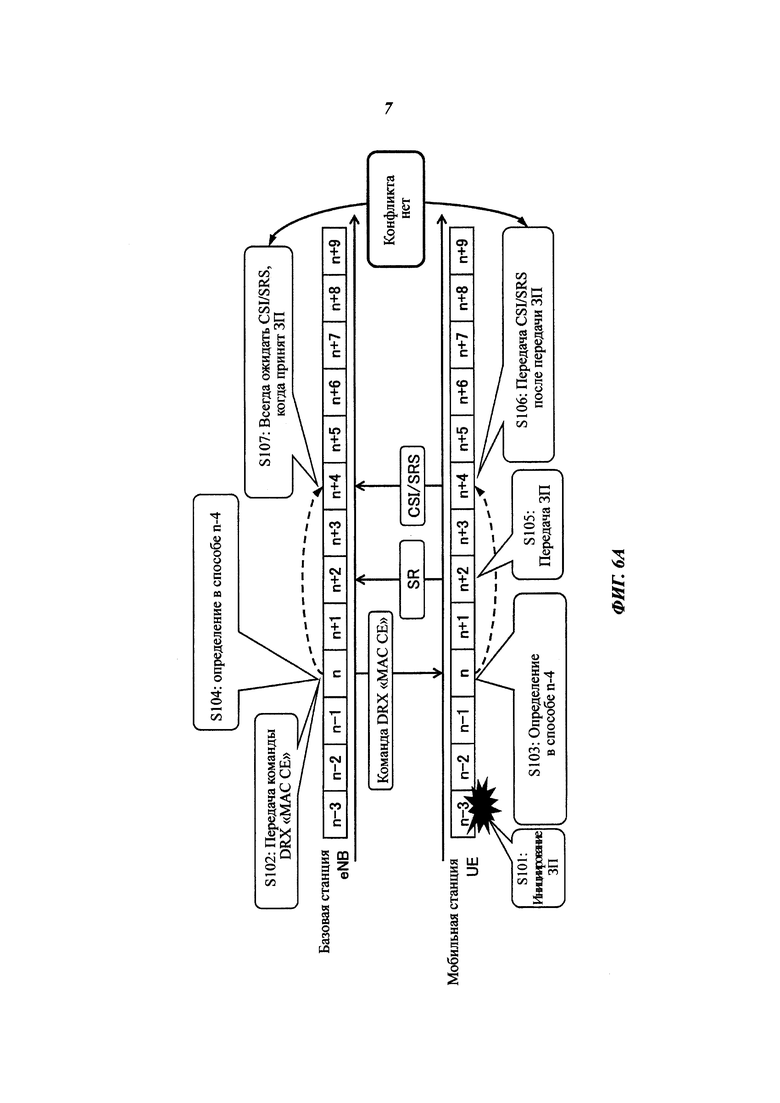
Фиг. 4 представляет функциональную схему мобильной станции UE в варианте осуществления настоящего изобретения. Как показано на фиг. 4, мобильная станция UE содержит модуль 11 управления состоянием DRX, модуль 12 управления ресурсом CSI/SRS, модуль 13 приема нисходящего сигнала и модуль 14 передачи восходящего сигнала. На фиг. 4 представлены только функциональные модули мобильной станции UE, конкретно относящиеся к настоящему изобретению, но мобильная станция UE также содержит по меньшей мере функциональные модули для выполнения операций в соответствии со схемой LTE, не показанные на чертеже.
Модуль 11 управления состоянием DRX управляет нахождением мобильной станции в состоянии DRX (состоянии прерывистого приема). Кроме того, модуль 11 управления состоянием DRX управляет состоянием RRC Connected мобильной станции UE, перешедшей в состояние DRX, как активным состоянием или неактивным состоянием.
Модуль 11 управления состоянием DRX обеспечивает пребывание мобильной станции UE в активном состоянии в следующих случаях (1)-(4):
(1) если активен любой из таймеров - таймер длительности включенного состояния (On duration Timer), таймер неактивности DRX (drx-InactivityTimer), таймер повторной передачи DRX (drx-RetransmissionTimer) и таймер разрешения конфликта уровня MAC (mac-contensionResolutionTimer);
(2) если передан запрос планирования (ЗП);
(3) если назначен восходящий грант для восходящей повторной передачи HARQ;
(4) если принят ответ произвольного доступа (random access response), после чего PDCCH для истребования новой передачи не принят.
Кроме того, в состоянии DRX модуль 11 управления состоянием DRX на основании операции определения в способе n-4 определяет, следует ли передать CSI или SRS (CSI/SRS), представляющие собой информацию о качестве, указывающую качество радиосвязи, после истечения заранее определенного времени (в субкадре n+4) от текущего момента времени (например, субкадра n). В операции определения в способе n-4 на основании вышеприведенных критериев определения (1)-(4) определяется, находится ли мобильная станция UE в активном состоянии. При определении нахождения мобильной станции UE в активном состоянии в операции определения в способе n-4 в критерий (2) входит ситуация, в которой ЗП уже на самом деле передан, и ситуация, в которой ЗП лишь инициирован (интервал от момента инициирования ЗП до момента передачи ЗП). В рассматриваемом далее втором варианте осуществления критерий (2) исключен из числа критериев определения, используемых для определения активного состояния в операции определения способа n-4.
Модуль 12 управления ресурсом CSI/SRS назначает ресурс для передачи CSI/SRS из числа ресурсов для PUCCH.
Модуль 13 приема нисходящего сигнала принимает команду DRX «МАС СЕ» и т.п., передаваемые базовой станцией eNB через DL-SCH. Затем модуль 13 приема нисходящего сигнала подает принятую команду DRX «МАС СЕ» в модуль 11 управления состоянием DRX.
Модуль 14 передачи восходящего сигнала передает в базовую станцию eNB запрос планирования, CSI/SRS и т.п. через канал PUCCH.
Модуль 13 приема нисходящего сигнала и модуль 14 передачи восходящего сигнала выполняют операции передачи и приема данных управления (данных плоскости управления, C-Plane) и данных пользователя (данных плоскости пользователя, U-Plane), отличных от вышеназванных сигналов.
Базовая станция eNB
Фиг. 5 представляет собой функциональную схему базовой станции eNB в варианте осуществления настоящего изобретения. Как показано на фиг. 5, базовая станция eNB содержит модуль 21 управления состоянием DRX, модуль 22 управления ресурсом CSI/SRS, модуль 23 приема восходящего сигнала и модуль 24 передачи нисходящего сигнала. На фиг. 5 представлены только функциональные модули базовой станции eNB, конкретно относящиеся к настоящему изобретению, но базовая станция eNB также содержит по меньшей мере функциональные модули для выполнения операций в соответствии со схемой LTE, не показанные на чертеже.
Модуль 21 управления состоянием DRX управляет нахождением мобильной станции UE, управляемой базовой станцией eNB, в состоянии DRX в процессе управления с DRX. Более конкретно, модуль 21 управления состоянием DRX управляет активным/неактивным состоянием мобильной станции UE, являющейся целевой мобильной станцией передачи, основываясь на передаче команды DRX «МАС СЕ» с целью перевода мобильной станции UE в неактивное состояние, приеме ЗП, передаваемого из мобильной станции UE, и т.п.
Кроме того, модуль 21 управления состоянием DRX на основании операции определения в способе n-4 определяет, следует ли ожидать передачу CSI/SRS из мобильной станции UE, то есть следует ли предпринимать попытку приема CSI/SRS.
Модуль 22 управления ресурсом CSI/SRS выделяет ресурс для приема CSI/SRS из числа ресурсов для PUCCH.
Модуль 23 приема восходящего сигнала принимает ЗП, CSI/SRS и т.п., передаваемые из мобильной станции UE через PUCCH.
Модуль 24 передачи нисходящего сигнала передает в базовую станцию eNB команду DRX «МАС СЕ» и т.п. через DL-SCH. Модуль 24 передачи нисходящего сигнала содержит функциональный блок планирования.
Модуль 23 приема восходящего сигнала и модуль 24 передачи нисходящего сигнала выполняют операции передачи и приема данных управления и данных пользователя, отличных от вышеназванных сигналов.
Содержание операции
В осуществлении настоящего изобретения предлагаются три способа управления в отношении CSI/SRS в управлении с DRX. Далее эти три способа управления описываются, соответственно, как варианты осуществления с первого по третий.
Первый вариант осуществления
В первом варианте осуществления мобильная станция выполняет управление таким образом, что, хотя на основании операции определения способа n-4 в мобильной станции UE определено «не передавать CSI/SRS», мобильная станция UE передает CSI/SRS, если после операции определения был передан ЗП. Иными словами, если ЗП передан, то мобильная станция UE передает CSI/SRS независимо от результата операции определения в способе n-4. С другой стороны, базовая станция eNB выполняет управление таким образом, чтобы после приема ЗП из мобильной станции UE «всегда ожидать CSI/SRS (предпринимать попытку выполнения операции приема CSI/SRS)» из мобильной станции UE.
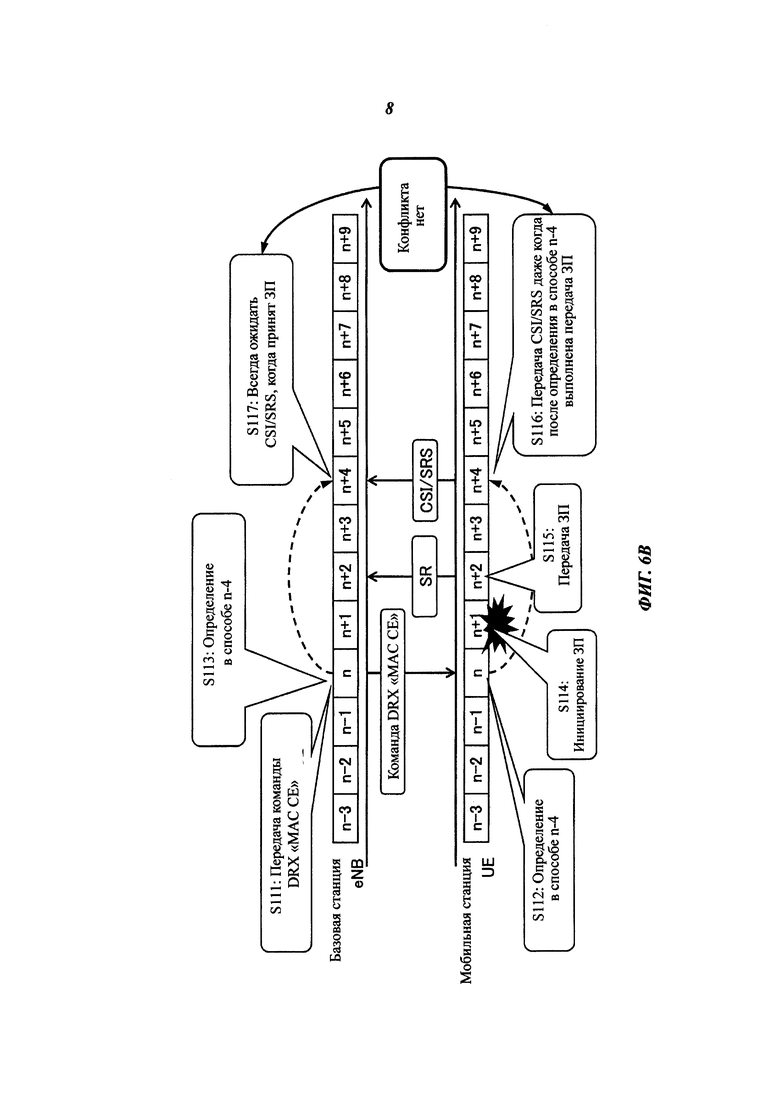
Далее со ссылкой на фиг. 6А и 6В описывается конкретное содержание операции в первом варианте осуществления. Фиг. 6А представляет содержание операции в ситуации, когда ЗП инициирован перед выполнением в мобильной станции UE операции определения в способе n-4. Фиг. 6 В представляет содержание операции в ситуации, когда ЗП инициирован после выполнения в мобильной станции UE операции определения в способе n-4.
Ситуация, в которой ЗП инициирован перед определением в способе n-4 (фиг. 6А)
На фиг. 6А вначале в мобильной станции инициируется ЗП (S101). Затем модуль 21 управления состоянием DRX, содержащийся в базовой станции eNB, формирует команду DRX «МАС СЕ» с целью смены состояния DRX мобильной станции UE на неактивное состояние и передает сформированную команду DRX «МАС СЕ» в целевую мобильную станцию UE через модуль 24 передачи нисходящего сигнала (S102).
Далее модуль 13 приема нисходящего сигнала мобильной станции UE принимает команду DRX «МАС СЕ», переданную из базовой станции eNB, и подает принятую команду DRX «МАС СЕ» в модуль 11 управления состоянием DRX. Модуль 11 управления состоянием DRX выполняет операцию определения в способе n-4 на основании состояния (активного/неактивного состояния) в момент времени субкадра n с целью определения, следует ли передать CSI/SRS в субкадре n+4 (S103).
Более конкретно, активный период прекращается модулем 11 управления состоянием DRX, поскольку данным модулем в момент времени субкадра n принята команда DRX «МАС СЕ». Однако, поскольку в момент времени субкадра n-3 (перед операцией определения в способе n-4) был инициирован ЗП, модуль 11 управления состоянием DRX определяет «передать CSI/SRS». Операция определения способа п-4 выполняется модулем 11 управления состоянием DRX в каждом субкадре.
Аналогично, модуль 21 управления состоянием DRX, содержащийся в базовой станции eNB, выполняет операцию определения в способе n-4 (S104). Более конкретно, поскольку на шаге S102 была передана команда DRX «МАС СЕ», модуль 21 управления состоянием DRX определяет, что состоянием мобильной станции UE не является активное состояние, на основании чего определяет «не ожидать CSI/SRS» из мобильной станции UE в момент времени субкадра n+4.
Далее модуль 14 передачи восходящего сигнала мобильной станции UE передает в базовую станцию eNB запрос планирования на основании инициирования на шаге S101 (S105) и уведомляет модуль 11 управления состоянием DRX о том, что выполнена операция передачи ЗП. Кроме того, модуль 23 приема восходящего сигнала, содержащийся в базовой станции eNB, принимает ЗП, переданный из мобильной станции UE, и уведомляет модуль 21 управления состоянием DRX о приеме ЗП.
Затем модуль 12 управления CSI/SRS мобильной станции UE управляет модулем 12 управления ресурсом CSI/SRS на основании результата определения, выполненного на шаге S103 (передать CSI/SRS), то есть таким образом, чтобы передать CSI/SRS в базовую станцию eNB (S106).
С другой стороны, хотя модуль 21 управления состоянием DRX базовой станции eNB определил «не ожидать CSI/SRS» из мобильной станции UE на шаге S104, модуль 21 управления состоянием DRX управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы «всегда ожидать CSI/SRS после приема ЗП» в случае, когда ранее принят ЗП (S107).
Соответственно, при работе с CSI/SRS конфликт между мобильной станцией UE и базовой станцией eNB не возникает.
Ситуация, в которой ЗП инициируется после определения в способе n-4 (фиг. 6В)
На фиг. 6В модуль 21 управления состоянием DRX, содержащийся в базовой станции eNB, формирует команду DRX «МАС СЕ» и передает сформированную команду DRX «МАС СЕ» в целевую мобильную станцию UE через модуль 24 передачи нисходящего сигнала (S111).
Далее модуль 13 приема нисходящего сигнала мобильной станции UE принимает команду DRX «МАС СЕ», переданную из базовой станции eNB, и подает принятую команду DRX «МАС СЕ» в модуль 11 управления состоянием DRX. Модуль 11 управления состоянием DRX выполняет операцию определения в способе n-4 (S112). Более конкретно, модуль 11 управления состоянием DRX определяет «не передавать CSI/SRS» в момент времени субкадра n+4, поскольку вследствие приема команды DRX «МАС СЕ» в момент времени субкадра п состоянием не является активное состояние.
Аналогично, модуль 21 управления состоянием DRX, содержащийся в базовой станции eNB, выполняет операцию определения в способе n-4 (S113). Более конкретно, поскольку на шаге S101 была передана команда DRX «МАС СЕ», модуль 21 управления состоянием DRX определяет, что состоянием мобильной станции UE не является активное состояние, на основании чего определяет «не ожидать CSI/SRS» из мобильной станции UE в момент времени субкадра n+4.
В это время в мобильной станции UE инициируется ЗП (S114), вследствие чего на основании инициирования в базовую станцию eNB модулем 14 передачи восходящего сигнала передается ЗП (S115). Модуль 14 передачи восходящего сигнала уведомляет модуль 11 управления состоянием DRX о том, что была выполнена операция передачи ЗП. Кроме того, модуль 23 приема восходящего сигнала, содержащийся в базовой станции eNB, принимает ЗП, переданный из мобильной станции UE, и уведомляет модуль 21 управления состоянием DRX о приеме ЗП.
Затем, хотя модуль 11 управления состоянием DRX, содержащийся в мобильной станции UE, на шаге S112 определил «не передавать CSI/SRS», данный модуль управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы «передать CSI/SRS», поскольку на шаге S115 был передан ЗП (S116).
С другой стороны, хотя модуль 21 управления состоянием DRX базовой станции eNB определил «не ожидать CSI/SRS» из мобильной станции UE на шаге S113, модуль 21 управления состоянием DRX управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы «всегда ожидать CSI/SRS после приема ЗП» в случае, когда ранее принят ЗП (S117).
Соответственно, при работе с CSI/SRS конфликт между мобильной станцией UE и базовой станцией eNB не возникает.
Схема (последовательность операций мобильной станции UE)
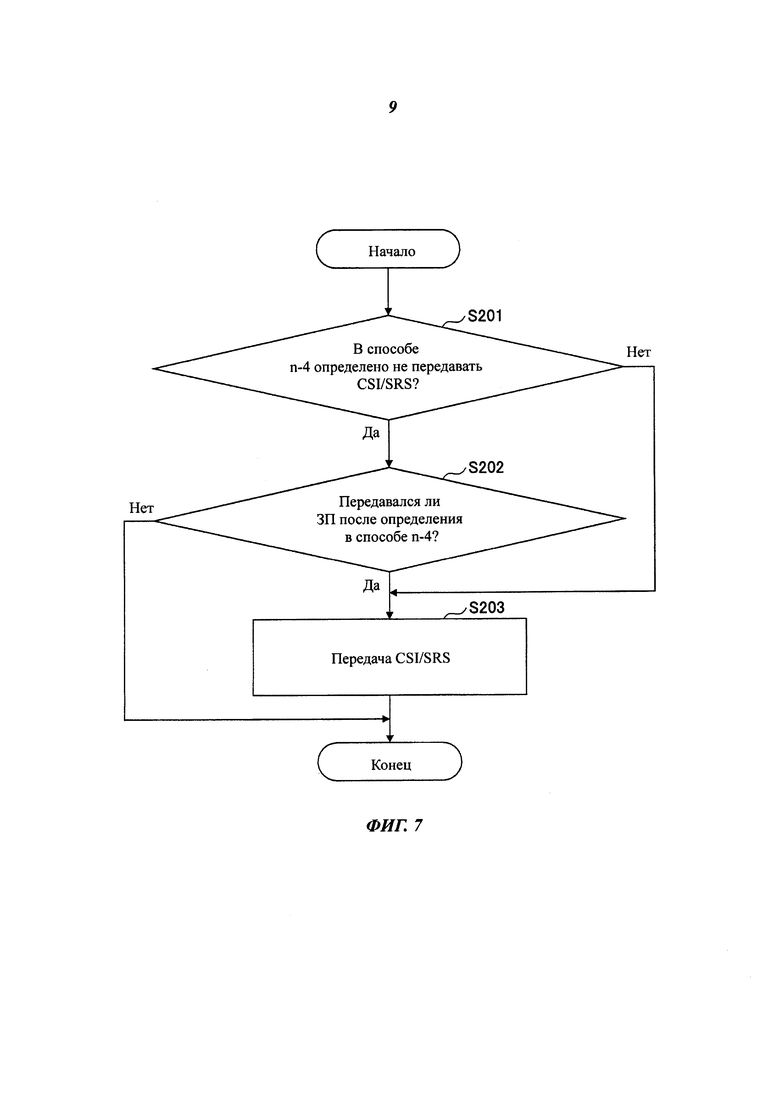
Далее с использованием схемы, показанной на фиг. 7, описывается пример функционирования мобильной станции UE в первом варианте осуществления. Фиг. 7 представляет собой диаграмму, иллюстрирующую последовательность операций, выполняемых каждый субкадр, и для примера описывается операция, выполняемая в момент времени субкадра n+4.
Вначале модуль 11 управления состоянием DRX, содержащийся в мобильной станции UE, определяет, является ли результат определения в способе n-4, выполненный в момент времени субкадра n, результатом «не передавать CSI/SRS» в момент времени субкадра n+4 (S201).
Если было определено «не передавать CSI/SRS» в момент времени субкадра n+4 («да» на шаге S201), то определяется, выполнялась ли в интервале от субкадра n, когда была выполнена операция определения в способе n-4, до субкадра n+4 передача ЗП (S202).
Если определено, что после операции определения в способе n-4 была выполнена передача ЗП («да» на шаге S202), или если не было определено «не передавать CSI/SRS» в момент времени субкадра n+4 («нет» на шаге S201), то модуль 11 управления состоянием DRX управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы была выполнена передача CSI/SRS в базовую станцию eNB (S203).
С другой стороны, если определено, что передача ЗП после операции определения в способе n-4 не выполнялась («нет» на шаге S202), то CSI/SRS не передается.
Как указано выше, в соответствии с первым вариантом осуществления независимо от моментов времени (порядка следования) инициирования ЗП и операции определения в способе n-4, когда из мобильной станции UE передан ЗП (когда ЗП принят в базовой станции eNB), мобильная станция UE управляется таким образом, чтобы передавать CSI/SRS, а базовая станция eNB управляется таким образом, чтобы ожидать передачи CSI/SRS из мобильной станции UE. Соответственно, можно избежать возникновения конфликта при работе с CSI/SRS в мобильной станции UE и в базовой станции eNB. Второй вариант осуществления
Во втором варианте осуществления мобильная станция выполняет управление таким образом, что мобильная станция UE не передает CSI/SRS, хотя из мобильной станции UE был передан ЗП после того, как было определено «не передавать CSI/SRS» на основании операции определения в способе n-4 в мобильной станции UE. Для реализации управления во втором варианте осуществления вышеуказанный критерий (2) «передан запрос планирования» исключается из числа критериев определения, используемых мобильной станцией UE для определения активного состояния мобильной станции UE в операции определения способа n-4. С другой стороны, хотя базовая станция eNB приняла ЗП из мобильной станции UE после того, как на основании операции определения в способе п-4 было определено «не ожидать CSI/SRS» из мобильной станции UE, базовая станция eNB выполняет управление таким образом, чтобы «не ожидать CSI/SRS (не предпринимать попытку выполнения операции приема)».
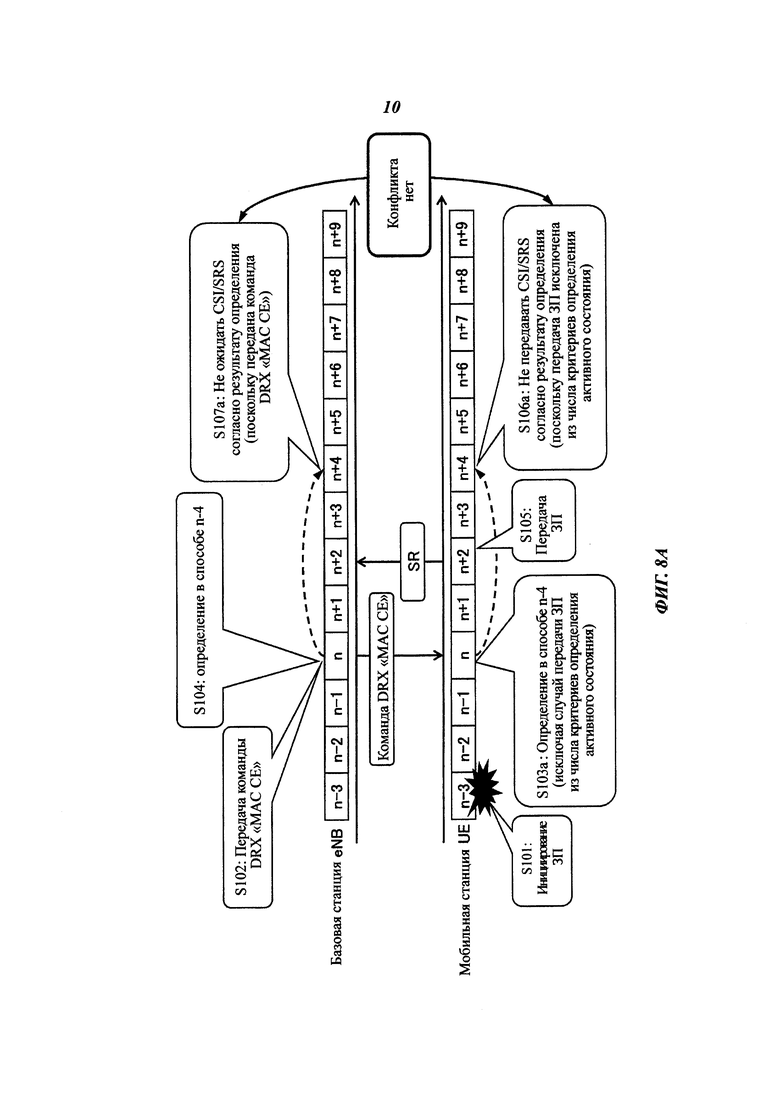
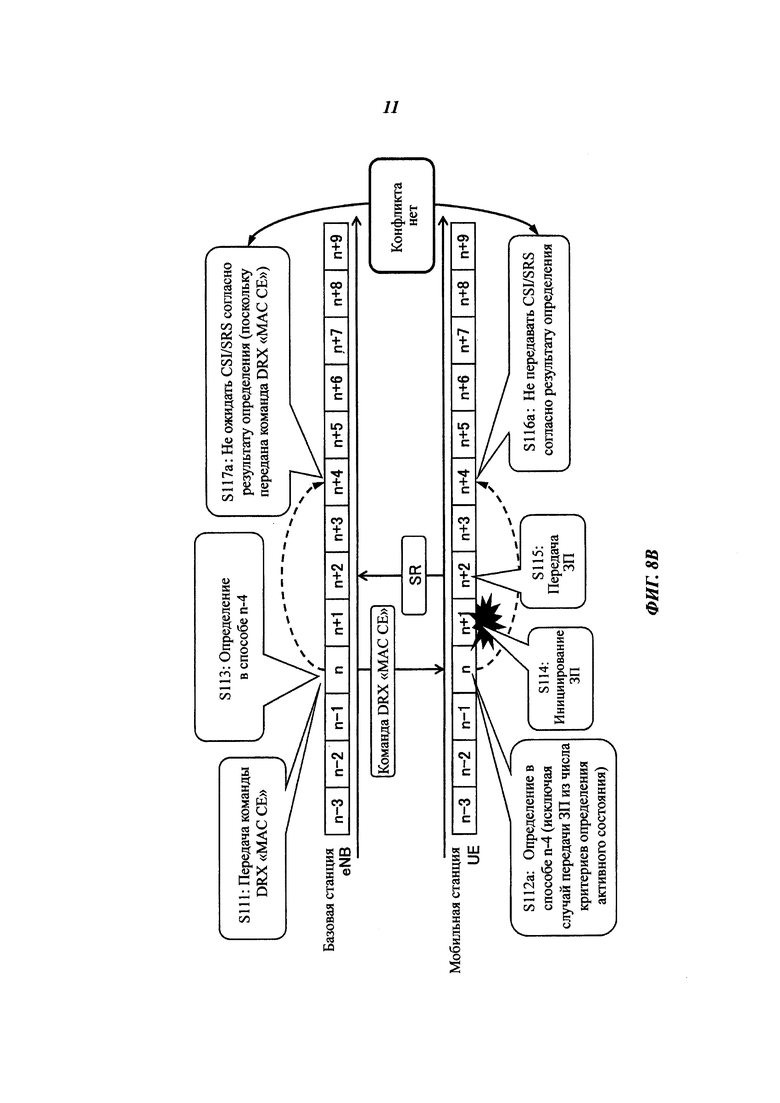
Далее со ссылкой на фиг. 8А и 8В описывается конкретное содержание операции во втором варианте осуществления. Фиг. 8А представляет содержание операции в ситуации, когда ЗП инициирован перед выполнением в мобильной станции UE операции определения в способе n-4. Фиг. 8В представляет содержание операции в ситуации, когда ЗП инициирован после выполнения в мобильной станции UE операции определения в способе n-4. На фиг. 8А и 8В операциям, одинаковым с операциями, показанными на фиг. 6А и 6В, присвоены такие же номера шагов, и подробные описания таких операций не приводятся.
Ситуация, в которой ЗП инициируется перед определением в способе n-4 (фиг. 8А)
На фиг. 8А модуль 11 управления состоянием DRX, содержащийся в мобильной станции UE, выполняет операцию определения в способе n-4 в субкадре n (S103a). Во втором варианте осуществления вышеупомянутый критерий (2) «передан запрос планирования (включая состояние от времени инициирования ЗП до времени передачи ЗП)» исключен из числа критериев определения, используемых для определения нахождения мобильной станции UE в активном состоянии в операции определения способа n-4. Более конкретно, несмотря на то, что на шаге S101 был инициирован ЗП, модуль 11 управления состоянием DRX определяет не передавать CSI/SRS, поскольку ситуация «передан ЗП (включая состояние от времени инициирования ЗП до времени передачи ЗП)» исключена из числа критериев определения при определении активного состояния в способе n-4.
Затем модуль 12 управления CSI/SRS мобильной станции UE управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы на основании результата определения, выполненного на шаге S103a («не передавать CSI/SRS»), не передавать CSI/SRS (S106a).
С другой стороны, модуль 21 управления состоянием DRX базовой станции eNB управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы «не ожидать CSI/SRS», что является обычным результатом определения в способе n-4 (S107a).
Соответственно, при работе с CSI/SRS конфликт между мобильной станцией UE и базовой станцией eNB не возникает.
Ситуация, в которой ЗП инициируется после определения в способе n-4 (фиг. 8В)
На фиг. 8В в субкадре n модуль 11 управления состоянием DRX, содержащийся в мобильной станции UE, выполняет операцию определения в способе n-4 (с исключением ситуации «передан ЗП (включая состояние от времени инициирования ЗП до времени передачи ЗП)» из числа критериев определения нахождения в активном состоянии) (S112a). Более конкретно, поскольку мобильная станция UE не находится в активном состоянии вследствие приема команды DRX «МАС СЕ» в момент времени субкадра n, модуль 11 управления состоянием DRX определяет «не передавать CSI/SRS» в момент времени субкадра n+4.
Затем модуль 11 управления состоянием DRX мобильной станции UE управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы «не передавать CSI/SRS» на основании результата определения на шаге S112a «не передавать CSI/SRS» (S116a).
С другой стороны, модуль 21 управления состоянием DRX базовой станции eNB управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы «не ожидать CSI/SRS», что является обычным результатом определения в способе n-4 (S117a).
Соответственно, при работе с CSI/SRS конфликт между мобильной станцией UE и базовой станцией eNB не возникает.
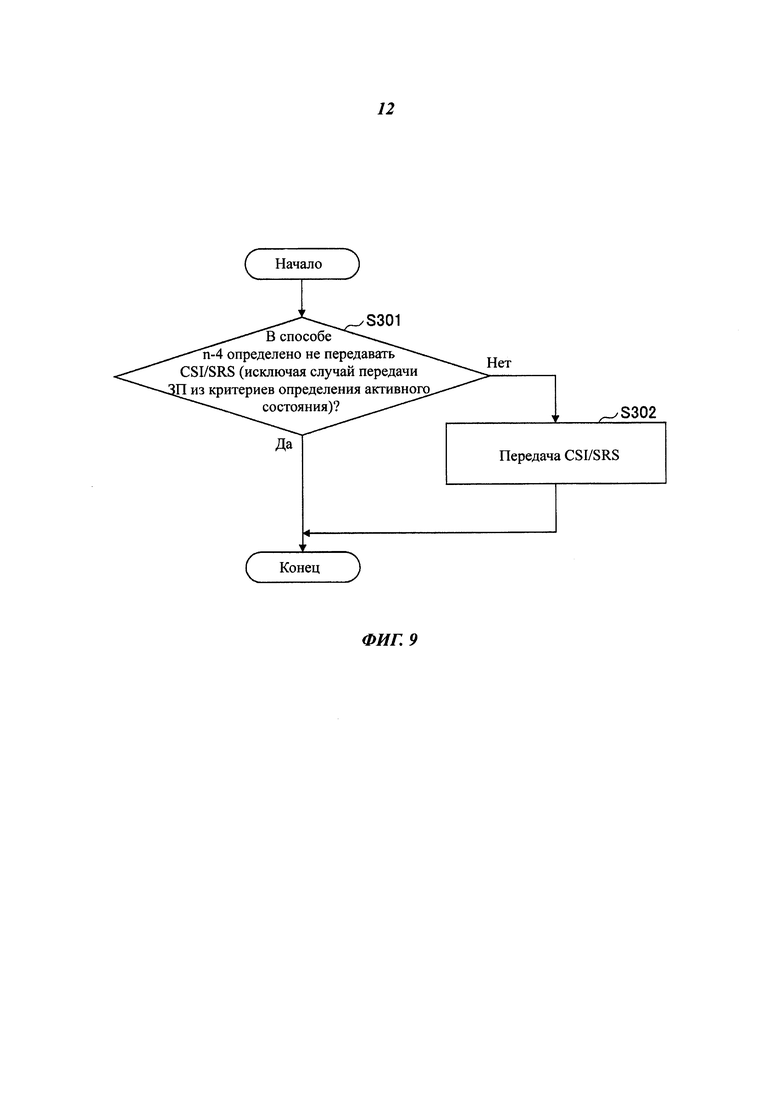
Схема (последовательность операций мобильной станции UE) Далее с использованием схемы, показанной на фиг. 9, описывается пример операций мобильной станции UE во втором варианте осуществления. Фиг. 9 представляет собой диаграмму, иллюстрирующую последовательность операций, выполняемых каждый субкадр, и для примера описывается операция, выполняемая в момент времени субкадра n+4.
Вначале модуль 11 управления состоянием DRX, содержащийся в мобильной станции UE, определяет, является ли результ определения в способе n-4, выполненного в момент времени субкадра n (с исключением ситуации «передан ЗП (включая состояние от времени инициирования ЗП до времени передачи ЗП)», из числа критериев определения нахождения в активном состоянии), «не передавать CSI/SRS» в момент времени субкадра n+4 (S301).
Если не определено «не передавать CSI/SRS» в момент времени субкадра n+4 («нет» на шаге S301), то есть, если определено «передать CSI/SRS», то модуль 11 управления состоянием DRX управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы выполнить передачу CSI/SRS в базовую станцию eNB (S302).
С другой стороны, если определено «не передавать CSI/SRS» в момент времени субкадра n+4 («да» на шаге S301), то CSI/SRS не передается.
Как указано выше, в соответствии со вторым вариантом осуществления, путем исключения ситуации «передан ЗП (включая состояние от времени инициирования ЗП до времени передачи ЗП)» из числа критериев определения нахождения в активном состоянии в операции определения способа n-4 в мобильной станции UE, можно избежать возникновения конфликта при работе с CSI/SRS между мобильной станцией UE и базовой станцией eNB независимо от моментов времени (порядка следования) инициирования ЗП и операции определения в способе n-4.
Третий вариант осуществления
В третьем варианте осуществления, хотя ЗП принимается после определения «не ожидать CSI/SRS» из мобильной станции UE на основании операции определения в способе n-4 в базовой станции eNB, базовая станция eNB выполняет управление таким образом, чтобы не предпринимать попытку приема (пропускать) первую CSI/SRS, переданную из мобильной станции UE после приема ЗП.
Первой CSI/SRS, переданной мобильной станцией UE после приема ЗП, является CSI/SRS, поступившая в базовую станцию eNB сразу или до истечения заранее определенного времени (например, 20 мс) после приема ЗП в базовой станции eNB. Указанным «управлением, осуществляемым таким образом, чтобы не предпринимать попытку приема (пропускать) CSI/SRS», в третьем варианте осуществления является, например, управление с целью выполнения планирования так, чтобы при поступлении CSI/SRS из мобильной станции UE в базовую станцию eNB не выделять ресурсы другим мобильным станциям UE, чтобы на другие мобильные станции UE не оказывалось влияния. Например, ресурсы восходящей линии связи выделяют таким образом, чтобы ресурсы восходящей линии связи, используемые для передачи в восходящем направлении из других мобильных станций UE, не конфликтовали с ресурсом (временным, частотным) восходящей линии связи, используемым для передачи CSI/SRS мобильной станцией UE. С другой стороны, мобильная станция UE может самостоятельно принять решение, следует ли передать CSI/SRS после передачи ЗП.
Со ссылкой на фиг. 10А и 10В описывается конкретное содержание операций в третьем варианте осуществления. Фиг. 10А представляет содержание операций в ситуации, когда ЗП инициирован перед выполнением в мобильной станции UE операции определения в способе n-4. Фиг. 10В представляет содержание операции в ситуации, когда ЗП инициирован после выполнения в мобильной станции UE операции определения в способе n-4. На фиг. 10А и 10В операциям, одинаковым с операциями, показанными на фиг. 6А и 6В, присвоены одинаковые номера шагов, и подробные описания таких операций не приводятся.
Ситуация, в которой ЗП инициируется перед определением в способе n-4 (фиг. 10А)
На фиг. 10А на основании результата определения, выполненного на шаге S103a («передать CSI/SRS»), модуль 12 управления CSI/SRS мобильной станции UE управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы передать CSI/SRS в базовую станцию eNB (S106b). Как указано выше, результат управления (передавать или не передавать) в операции передачи CSI/SRS может самостоятельно определяться при передаче ЗП или инициировании ЗП.
С другой стороны, поскольку модуль 21 управления состоянием DRX базовой станции eNB принимает ЗП после определения «не ожидать CSI/SRS» из мобильной станции UE на шаге S104, модуль 21 управления состоянием DRX пропускает первую CSI/SRS, переданную из мобильной станции после приема ЗП, и управляет модулем 22 управления ресурсом CSI/SRS с выполнением планирования таким образом, чтобы на другие мобильные станции UE не оказывалось влияние (S107b).
В этом случае, несмотря на возникновение между мобильной станцией UE и базовой станцией eNB конфликта при работе с CSI/SRS, управление может выполняться таким образом, чтобы базовая станция eNB, управляя планированием CSI/SRS, не допускала влияния на другие мобильные станции UE.
Ситуация, в которой ЗП инициируется после определения в способе n-4 (фиг. 10В)
На фиг. 10В на основании результата выполненного на шаге S112 определения «не передавать CSI/SRS» модуль 11 управления состоянием DRX мобильной станции UE управляет модулем 12 управления ресурсом CSI/SRS таким образом, чтобы «не передавать CSI/SRS» (S116b).
С другой стороны, поскольку модуль 21 управления состоянием DRX базовой станции eNB принимает ЗП после определения на шаге S113 «не ожидать CSI/SRS» из мобильной станции UE, модуль 21 управления состоянием DRX управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы пропускать первую CSI/SRS, переданную из мобильной станции после приема ЗП (S117b). В этом случае модуль 11 управления состоянием DRX управляет модулем 22 управления ресурсом CSI/SRS таким образом, чтобы ожидать из мобильной станции UE следующую (вторую или принимаемую после истечения заранее определенного времени) CSI/SRS.
Соответственно, при работе с CSI/SRS конфликт между мобильной станцией UE и базовой станцией eNB не возникает.
Схема (последовательность операций базовой станции eNB)
Далее с использованием схемы, показанной на фиг. 11, описывается пример операций базовой станции eNB в третьем варианте осуществления. Фиг. 11 представляет собой диаграмму, иллюстрирующую последовательность операций, выполняемых каждый субкадр, и для примера описывается операция, выполняемая в момент времени субкадра n+4.
Вначале модуль 21 управления состоянием DRX, содержащийся в базовой станции eNB, определяет, является ли результат определения в способе n-4, выполненного в момент времени субкадра n, «не ожидать CSI/SRS» из мобильной станции UE в момент времени субкадра n+4 (S401).
Если было определено «не ожидать CSI/SRS» в момент времени субкадра n+4 («да» на шаге S401), то определяется, был ли принят ЗП в период от субкадра n, когда была выполнена операция определения в способе n-4, до субкадра n+4 (S402).
Если определено, что после операции определения в способе n-4 был выполнен прием ЗП («да» на шаге S402), то модуль 21 управления состоянием DRX управляет модулем 22 управления ресурсом CSI/SRS так, чтобы планирование выполнялось с пропуском первой CSI/SRS, переданной из мобильной станции UE после приема ЗП, и в результате не оказывалось влияние на другие мобильные устройства UE (S403).
С другой стороны, если было определено «не ожидать CSI/SRS» в момент времени субкадра n+4 («нет» на шаге S401), или если было определено, что прием ЗП после операции определения в способе n-4 не выполнялся («нет» на шаге S402), то модуль 21 управления состоянием DRX инициирует выполнение модулем 12 управления ресурсом CSI/SRS управления на основании результата определения в соответствии со способом n-4.
Как указано выше, в соответствии с третьим вариантом осуществления, если базовая станция eNB приняла ЗП после того, как в соответствии со способом n-4 было определено «не ожидать CSI/SRS» в базовой станции eNB, то указанная базовая станция eNB выполняет управление таким образом, чтобы пропускать первую после приема ЗП CSI/SRS и в результате не оказывать влияния на другие мобильные станции UE. Таким образом, могут быть устранены эффекты, являющиеся следствием возникновения конфликта при работе с CSI/SRS между мобильной станцией UE и базовой станцией eNB.
Кроме того, в соответствии с третьим вариантом осуществления, эффекты, являющиеся следствием возникновения конфликта, могут быть устранены путем изменения содержания операций управления в базовой станции eNB. Такая реализация, например, проще, чем изменение содержания операций мобильных станций UE, поскольку количество мобильных станций и количество типов мобильных станций, как правило, больше, чем количество и количество типов базовых станций eNB.
В вышеприведенных вариантах осуществления с первого по третий в качестве примера ситуации, в которой между мобильной станцией UE и базовой станцией eNB может возникать конфликт при работе с CSI/SRS, использован прием команды DRX «МАС СЕ» в мобильной станции UE, являющейся инициатором внезапного прекращения активного периода мобильной станции UE (фиг. 6А, 6В, 8А, 8В, 10А и 10В). Однако конфликт может возникнуть, например, и в случае, когда активный период внезапно продлевается, поскольку при этом невозможно передать CSI/SRS. Поэтому настоящее изобретение может быть применено не только в случае внезапного прекращения активного периода, но также и в случае внезапного продления активного периода, что дает возможность избежать конфликта между мобильной станцией UE и базовой станцией eNB при работе с CSI/SRS.
В вариантах осуществления настоящего изобретения запрос планирования, передаваемый из мобильной станции UE в базовую станцию eNB, является примером сигнала управления, и настоящее изобретение может использоваться и при передаче сигнала управления, отличного от запроса планирования.
Для удобства пояснения пользовательское устройство UE и базовая станция eNB пояснялись с использованием функциональных схем. Тем не менее каждое из устройств могут быть осуществлено аппаратно, программно или сочетанием указанных способов. Программа, функционирующая в соответствии с настоящим изобретением (программа, выполняемая процессором, предусмотренным в устройстве UE пользователя; программа, выполняемая процессором, предусмотренным в базовой станции eNB) может быть сохранена на любом пригодном для этой цели носителе информации, например, в оперативном запоминающем устройстве (Random Access Memory, RAM), во флэш-памяти, в постоянном запоминающем устройстве (Read Only Memory, ROM), в EPROM, EEPROM, в регистре, на жестком диске (HDD), на съемном диске, на CD-ROM, в базе данных, на сервере и т.п.
Несмотря на подробное описание конкретных вариантов осуществления настоящего изобретения, настоящее изобретение не ограничено вышеприведенными вариантами, и в пределах объема настоящего изобретения могут быть предложены разнообразные разновидности и модификации.
По настоящей международной заявке испрашивается приоритет на основании заявки Японии №2013-099326, поданной в Патентное ведомство Японии 09 мая 2013 г., и все содержание заявки Японии №2013-099326 включено в настоящий документ посредством ссылки.
Перечень обозначений
eNB: базовая станция
UE: мобильная станция
11: модуль управления состоянием DRX
12: модуль управления ресурсом CSI/SRS
13: модуль приема нисходящего сигнала
14: модуль передачи восходящего сигнала
21: модуль управления состоянием DRX
22: модуль управления ресурсом CSI/SRS
23: модуль приема восходящего сигнала
24: модуль передачи нисходящего сигнала.
Изобретение относится к мобильной связи. Техническим результатом является возможность избежать возникновения конфликта функционирования между мобильной станцией, передающей информацию о качестве, и базовой станцией, ожидающей приема, даже в случае передачи из мобильной станции запроса планирования в системе мобильной связи, использующей управление с DRX. Мобильная станция, осуществляющая связь с базовой станцией, содержит средства, определяющие, следует ли после истечения заранее определенного времени передавать в базовую станцию информацию о качестве, указывающую качество радиосвязи, на основании состояния мобильной станции, которым является активное состояние или неактивное состояние при управлении с прерывистым приемом; и средства, передающие информацию о качестве после истечения заранее определенного времени, даже если определено не передавать информацию о качестве на основании указанного определения, в случае, если до истечения заранее определенного времени в базовую станцию передан запрос планирования. 2 н.п. ф-лы, 16 ил.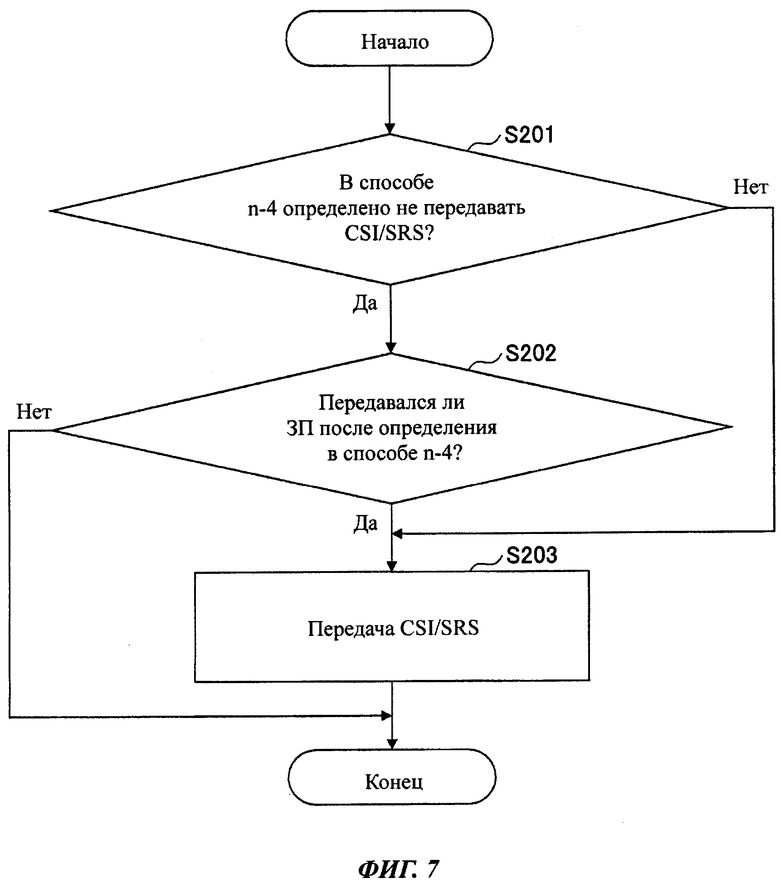
1. Мобильная станция, осуществляющая связь с базовой станцией, содержащая
средства, определяющие, следует ли после истечения заранее определенного времени передавать в базовую станцию информацию о качестве, указывающую качество радиосвязи, на основании состояния мобильной станции, активного или нет, при управлении с прерывистым приемом; и
средства, управляющие передачей информации о качестве на основании результата указанного определения;
причем, если определено не передавать информацию о качестве на основании указанного определения, то мобильная станция не передает информацию о качестве, даже если из мобильной станции передан запрос планирования.
2. Способ управления передачей, выполняемый мобильной станцией, передающей в базовую станцию информацию о качестве, указывающую качество радиосвязи, включающий:
шаг определения, следует ли после истечения заранее определенного времени передавать в базовую станцию информацию о качестве, на основании состояния мобильной станции, активного или нет, при управлении с прерывистым приемом; и
шаг управления передачей информации о качестве на основании результата указанного определения,
причем, если определено не передавать информацию о качестве на основании указанного определения, то мобильная станция не передает информацию о качестве, даже если из мобильной станции передан запрос планирования.
| Samsung Electronics Co., Ltd., Discussion on Active time and CSI/SRS activity, R2-115031, 3GPP, 02 October 2-11 | |||
| Samsung Electronics Co., Ltd., Discussion on DRX cycle and CSI/SRS transmission, R2-124082, 3GPP, 07 August 2010 | |||
| МОБИЛЬНАЯ СТАНЦИЯ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ОСУЩЕСТВЛЕНИЯ СВЯЗИ | 2006 |
|
RU2414105C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ УВЕЛИЧЕНИЯ ЭФФЕКТИВНОСТИ ВОССТАНОВИТЕЛЬНОЙ ПЛАВКИ ОКСИДНЫХ НОСИТЕЛЕЙ МЕТАЛЛОВ | 1996 |
|
RU2120476C1 |

