Уровень техники
[0001] Настоящая заявка основана на ранее поданной предварительной заявке на патент США № 61/858014, поданной 24 июля 2013 г., содержание которой в полном объеме включено в настоящий документ посредством ссылки.
[0002] Настоящее изобретение относится, главным образом, к области геомагнитной съемки. Более конкретно, изобретение относится к способу расчета локального геомагнитного возмущающего поля, так что геомагнитная съемка может более точно базироваться на реальном геомагнитном поле.
[0003] Точное знание локального геомагнитного поля необходимо для многочисленных применений, таких как, среди прочего, навигация, определение ориентации и управление движущимися объектами, ориентирование антенн, направленное бурение, магнитная съемка, определение местоположения залегающих объектов, уменьшение магнитной аномалии и обнаружение магнитной аномалии. Например, при размещении скважины с помощью измерений в процессе бурения (measurement while drilling, MWD) в качестве опорного направления часто используют направление геомагнитного поля. Для вычисления геодезического азимута компоновки низа бурильной колонны (bottom hole assembly, BHA), которое представляет собой комплект различных типов бурильных инструментов, при этом устройства MWD выполняют измерения магнитного поля Земли, и пользователь определяет связь измерений геомагнитного опорного поля на буровой площадке скважины. Это требует точного знания локального направления и напряженности геомагнитного опорного поля (относительно геодезических опорных данных).
[0004] Для применения при размещении скважины, т. е. направленном бурении, способ, известный в технике как метод интерполяционной привязки к месту (Interpolated In-Field Referencing, IIFR), описан в патенте США № 6021577, выданном Шилс и др. Метод IIFR обеспечивает оценку магнитного возмущающего поля на буровой площадке. Способ IIFR является способом, в котором вариации возмущающего поля на буровой площадке выводят из вариаций магнитного поля Земли, измеренных на удаленных площадках.
Метод IIFR включает в себя следующие составляющие геомагнитного поля:
[0005] (i) постоянная разность между элементами геомагнитного поля между буровой площадкой и каждой из удаленных площадок (уравнение:  );
);
[0006] (ii) фазовый сдвиг ежесуточной (за период 24 часа) вариации вследствие разности географической долготы между буровой площадкой и каждой из удаленных площадок (первый член в правой части уравнения  ); и
); и
[0007] (iii) средневзвешенная величина краткосрочных вариаций «фильтрованных высоких частот» на удаленных площадках (второй член в правой части уравнения  ).
).
[0008] Поправка (i) просто выражает тот факт, что существует разность между геомагнитным полем на буровой площадке и каждой из удаленных площадок. Указанная поправка не включает в себя влияния возмущающего поля.
[0009] Возможным ограничением поправок (ii) и (iii) является то, что они предполагают, что геомагнитные вариации на буровой площадке идентичны средневзвешенной величине вариаций на удаленных площадках (за исключением фазового сдвига 24-часовых ежесуточных вариаций для учета разности долготы между буровой площадкой и каждой из удаленных площадок). Данное предположение обычно неверно на практике.
[0010] Действительное магнитное возмущающее поле является суммой исходных полей, вызванных электрическими токами в ионосфере и магнитосфере, и вторичных наведенных полей, вызванных электромагнитной индукцией в Земле и океанах. Путем вычисления магнитных вариаций на буровой площадке из средневзвешенной величины вариаций на удаленных площадках в методе IIFR делают два допущения, которые часто являются неверными:
[0011] (a) что исходные поля идентичны на буровой площадке и на удаленных площадках. Это может быть неправильным, поскольку исходные поля изменяются в пространственном отношении, особенно в высоких широтах, и
[0012] (b) что наведенные поля идентичны на буровой площадке и на удаленных площадках. Это может быть неправильным вследствие разности в удельной электропроводности подповерхностного слоя между буровой площадкой и удаленными площадками. Удельная электропроводность зависит от локального состава и содержания воды в подповерхностном слое. Особенно в ситуациях, когда буровая площадка находится в открытом море, а удаленные площадки находятся на суше, различия в удельной электропроводности могут составлять много порядков величины, что приводит к большим различиям в геомагнитных вариациях и невозможности правильного выполнения метода IIFR.
Краткое описание чертежей
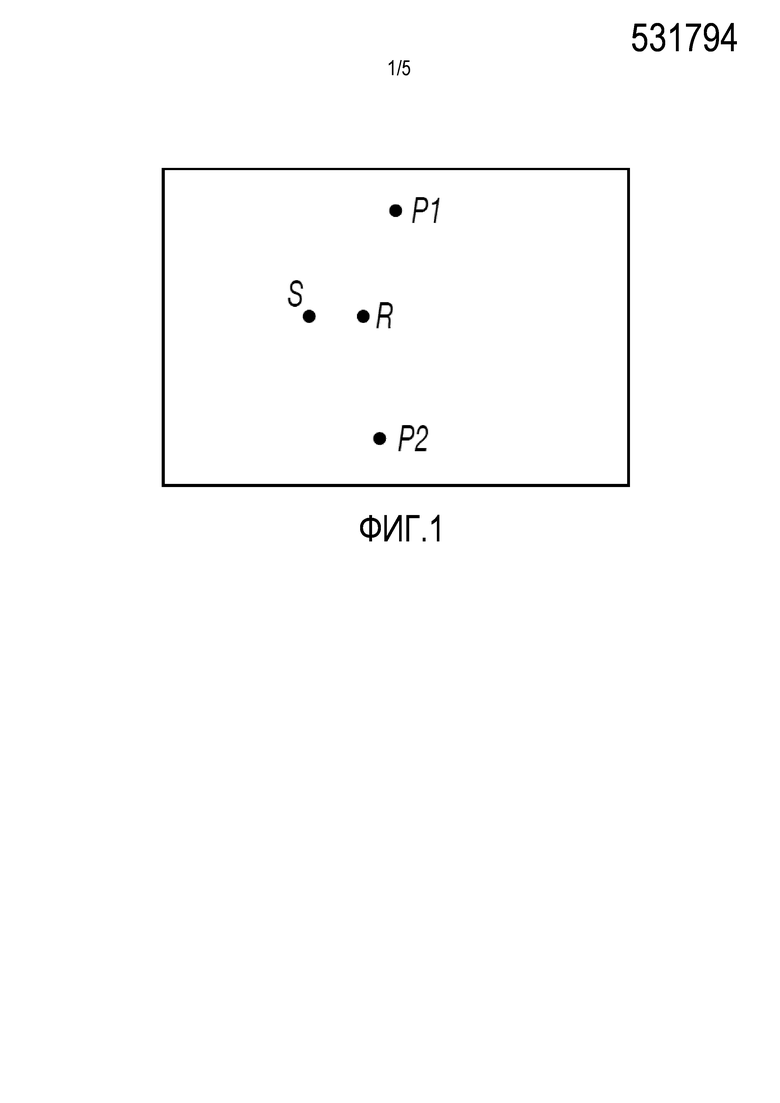
[0013] На фиг. 1 приведена схема, иллюстрирующая относительные положения локальной площадки и связанных удаленных площадок измерения, и
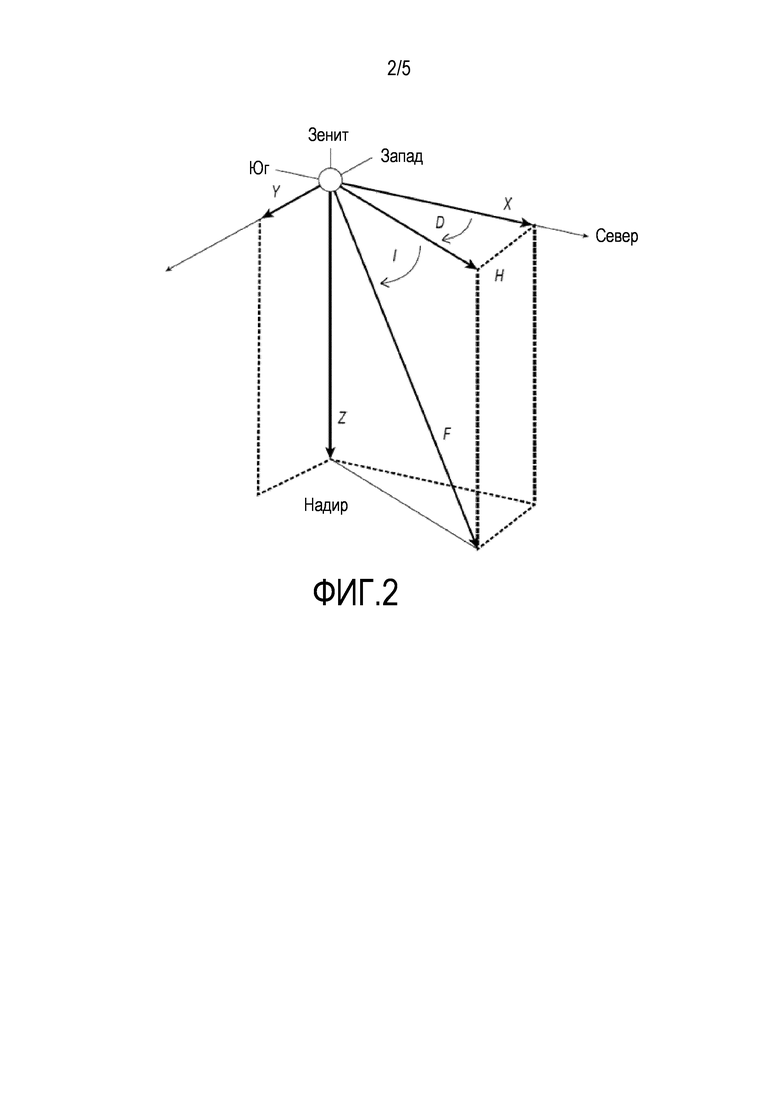
[0014] На фиг. 2 показаны геомагнитные элементы, описывающие вектор магнитного поля Земли.
[0015] На фиг. 3 приведена схема, показывающая, как измеренные входные параметры (магнитные элементы X, Y, Z и F на удаленных площадках и параметры солнечного ветра IMF-Bz и Em), измеренные с помощью космической станции ACE, связаны с расчетными элементами возмущающего поля (магнитное склонение, наклонение и результирующее поле) на локальной площадке для образцовой конфигурации.
[0016] На фиг. 4 показано сравнение измеренного магнитного поля и расчетных полей с использованием метода IIFR и метода передаточных функций.
[0017] На фиг. 5 показано сравнение измеренного магнитного поля на второй станции измерения и расчетного магнитного поля от станции по фиг. 4 с использованием методов IIFR и передаточных функций.
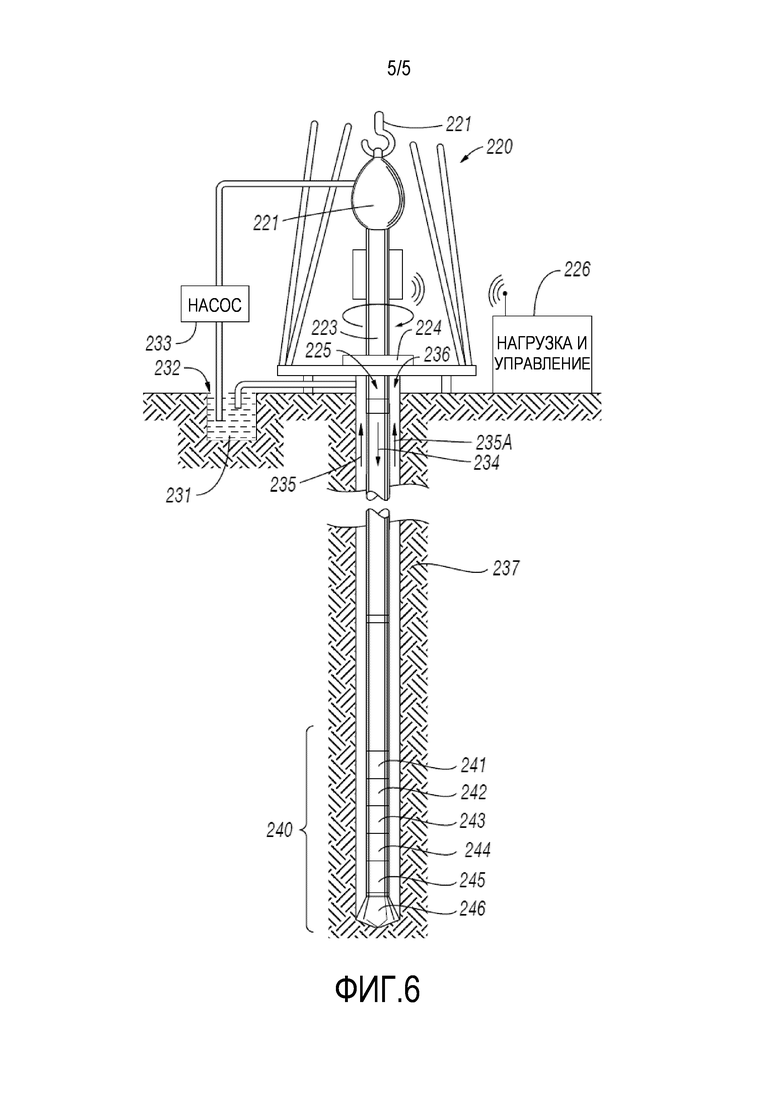
[0018] На фиг. 6 проиллюстрирована система буровой площадки, в которой могут быть использованы аспекты настоящего изобретения.
Подробное описание
[0019] Для практических целей природное магнитное поле в каком-либо местоположении может иметь три составляющие:
[0020] (i) основное геомагнитное поле, обычно принимающее вид глобальных моделей магнитного поля Земли. Основное магнитное поле первоначально создается в земной коре и изменяется медленно во временном масштабе, от нескольких месяцев до нескольких лет.
[0021] (ii) локальная аномалия коры или смещение коры, вызванное магнитными минералами в земной коре в области, в которой должна выполняться разведка на основе магнитного поля Земли, и
[0022] (iii) магнитное возмущающее поле, вызванное электрическими токами в околоземном пространстве, и соответствующими зеркальными токами, наведенными в Земле и океанах. Возмущающее поле обычно изменяется во временном масштабе от секунд до дней. Большая часть вариаций в высоких широтах происходит с периодами от минут до часов.
[0023] Все три вышеупомянутые составляющие должны приниматься во внимание при вычислении точного локального геомагнитного опорного поля.
[0024] В первой фазе метода в соответствии с настоящим изобретением могут быть выбраны станции мониторинга удаленного магнитного поля, и локальный вариометр может быть использован в течение ограниченного периода времени или в течение долгосрочного периода. Со ссылками на фиг. 1 показана площадка S, где должна использоваться магнитная съемка для выполнения измерений магнитного поля Земли, например, для определения геодезической траектории скважины направленного бурения. Станции дистанционного мониторинга, показанные в P1 и P2, и локальный вариометр, показанный в R, используют вблизи площадки S. «Вблизи» в настоящем контексте может быть определено как на расстоянии, достаточно далеком от площадки S, так что магнитные возмущения, создаваемые за счет наличия магнитных материалов и электрического оборудования, по существу не влияют на измерения, выполняемые на локальной площадке вариометра R. Хотя в настоящем примере использованы две удаленных станции P1 и P2, изобретение предполагает использование только одной или больше чем двух таких удаленных станций. Соответственно, объем изобретения не ограничен представленным здесь примером двух станций.
[0025] Удаленные станции P1, P2 могут обеспечить точные измерения геомагнитного поля при стабильном базисе и могут иметь возможность передавать данные измерений в режиме реального времени к площадке S или любому другому местоположению. Удаленные станции P1, P2 могут быть геомагнитными обсерваториями или станциями вариометров, которые уже действуют, и геодезические положения которых известны или определимы. В случае, когда подходящие удаленные станции недоступны в соответствующей близости к площадке S, могут быть использованы дополнительные удаленные станции. Удаленные станции P1, P2 могут действовать в течение периода времени, во время которого используют локальный вариометр R.
[0026] В положении, показанном в R на фиг. 1, может быть использован 3-компонентный магнитный вариометр для непрерывной записи вариаций геомагнитного поля при подходящей частоте выборки (например, от 0,1 до 10 Гц). Вариометр может быть трехосным феррозондовым магнитометром с линейным сердечником, широко используемым в станциях вариометров в Северной Америке и Северной Европе. В некоторых примерах три оси могут быть взаимно ортогональными. Пример вариометра, который может быть использован в некоторых примерах, решен по модели с обозначением Suspended dldD от GEM Systems, 135 Spy Court, Markham, Ontario, Canada, L3R 5H6. Данный тип магнитного вариометра состоит из датчика абсолютного поля Оверхаузера, окруженного блоками катушек наклонения и склонения. Датчик Оверхаузера измеряет абсолютную напряженность магнитного поля. Катушки затем генерируют короткую последовательность магнитных зондирующих полей. Три ортогональных компонента вектора (X, Y, Z) геомагнитного поля затем могут быть вычислены из отклика абсолютного датчика и зондирующих полей. Возможным преимуществом данного типа датчика является то, что он обеспечивает, по существу, стабильность базиса и очень низкую температурную чувствительность, что делает его практически подходящим как для временного, так и для долгосрочного использования вариометра.
[0027] Удаленные станции P1, P2 и локальный вариометр в R может измерять любое число из семи геомагнитных элементов (напряженность X в северном направлении, напряженность Y в восточном направлении, напряженность Z по вертикали, результирующую напряженность F, угол магнитного наклонения или наклонения I, угол склонения D и напряженность H по горизонтали), которые достаточны для решения всех семи компонентов геомагнитного поля.
[0028] Только три геомагнитных элемента являются независимыми. Например, если X, Y и Z являются измеренными или известными, то H, F, D и I могут быть выведены как  , где arctan(a,b) является tan-1 (a/b), учитывая угловой квадрант. Соответственно, X, Y и Z могут быть вычислены из D, I и F.
, где arctan(a,b) является tan-1 (a/b), учитывая угловой квадрант. Соответственно, X, Y и Z могут быть вычислены из D, I и F.
[0029] На фиг. 2 изображены вышеуказанные геомагнитные элементы. Для описания вектора геомагнитного поля могут быть использованы различные комбинации геомагнитных элементов. Семь элементов вектора В геомагнитного поля в геодезической системе отсчета – это напряженность X в северном направлении, напряженность Y в восточном направлении, напряженность Z по вертикали (положительная в направлении вниз), результирующая напряженность F, угол наклонения I (также называемый углом магнитного наклонения и измеряемый от горизонтально плоскости до вектора поля, положительного в направлении вниз), угол склонения D (также называемый магнитным склонением и измеряемый по часовой стрелке от истинного севера до горизонтального компонента вектора поля) и напряженность H по горизонтали.
[0030] На фиг. 3 показан пример конфигурации, в котором измерения геомагнитных элементов X, Y, Z и F на удаленных площадках P1 и P2 сочетаются с измерениями из z-компонента межпланетного магнитного поля (Interplanetary Magnetic Field, IMF-Bz); и слияния электрического поля (Em), измеренного с помощью космической станции (Advanced Composition Explorer, ACE), для создания входных каналов. Применение передаточной функции в частотной области или эквивалентной свертки во временной области обеспечивает расчетные вариации возмущающего поля, имеющегося в геомагнитных элементах D, I и F в местоположении R вблизи локальной площадки (например, площадки S на фиг. 1).
[0031] Со ссылками на фиг. 1 местоположение, по существу свободное от искусственных источников магнитного возмущающего поля, таких как дороги, железные дороги, мосты, трубопроводы и платформы и т. п., может быть выбрано как площадка мониторинга R. 3-компонентный магнитный вариометр, как поясняется выше, затем может быть использован на площадке R, так что вариации температуры и механические перемещения вариометра сведены к минимуму. Возможности использования вариометра включают в себя погружение вариометра вблизи земной поверхности или использование его на дне водного пространства для использования на море. Вариации 3-компонентного геомагнитного поля могут быть измерены и записаны на площадке R для выбранного периода времени. Период использования вариометра может длиться от нескольких дней до непрерывного использования в течение долгосрочного периода.
[0032] Во второй фазе метода в соответствии с настоящим изобретением может быть оценена передаточная функция между измерениями, выполненными на удаленных станциях P1, P2, и измерениями, выполненными с помощью магнитного вариометра, используемого в выбранном положении R. Удаленная станция должна действовать в течение времени, по время которого локальный вариометр действует в положении R.
[0033] Число удаленных станций (например, в P1, P2) может быть обозначено n. Если каждая из удаленных станций измеряет три компонента вектора геомагнитного поля, то результат представляет 3n каналов Uj при j = 1, ..., 3n.
[0034] Затем возмущающее поле может быть изолировано от медленно изменяющегося основного геомагнитного поля и поля коры. Одним примером метода для выполнения такой изоляции является подгонка и вычитание линии простой линейной регрессии из каждого из 3n каналов Uj. В случае, когда период исследований (время записи на каждой удаленной площадке P1, P2) больше, чем примерно 3 месяца, линейная аппроксимация больше может быть не адекватной представленному основному геомагнитному полю и полю коры и может быть необходимо вычитать функции более высокого порядка, такие как сплайны. Сплайновые функции Sj(t) могут быть подобраны для измерений от каждого из 3n входных каналов Uj(ti), где ti – временные метки измерений, путем минимизации критерия оптимальности или функции ошибок, например может быть в виде E = Σi(Sj(ti) - Uj(ti))2. Подходящие сплайновые функции могут быть, например, кубическими B-сплайнами. Затем может быть выбрано разделение узла, которое больше, чем самый длинный период возмущающего поля, представленный в передаточной функции. Например, если должны прогнозироваться вариации возмущающего поля при периоде до 1 месяца, разделение узла сплайнов может быть больше, чем 1 месяц. Сплайновые функции представляют медленно изменяющиеся части геомагнитного поля, большей частью состоящего из основного геомагнитного поля и поля коры.
[0035] Удаленная станция, например, P1, P2 на фиг. 1 может быть геодезически привязана или может быть вариометром, установленным на движущемся транспортном средстве, например, судне на поверхности водного пространства, волновом глиссере или наземном транспортном средстве. Для перемещения в пределах ограниченной площади (с максимальным радиусом примерно 5 км) возмущающее поле можно считать пространственно однородным. Однако пространственные градиенты основного геомагнитного поля и поля коры будут проявляться как вариации магнитного поля вдоль пути транспортного средства. Для корректировки данного эффекта пространственная вариация основного геомагнитного поля и поля коры на подвижной удаленной площадке может быть представлена функцией Cj(x,y) пространственных координат x и y для магнитной компоненты с индексом j, измеренным на удаленной станции, например, P1, P2 на фиг. 1. Функции локальной пространственной вариации Cj(x,y) могут уже быть известны. В противном случае локальные пространственные вариации могут быть вычислены из измерений Uj путем распространения вышеуказанной линейной регрессии на многовариантную линейную регрессию в t, x и y. Другой способ вычисления пространственной вариации может заключаться в распространении временной модели сплайновой функции Sj(t) с пространственной моделью Cj(x,y), представленной полиномом низшего порядка в x и y. Минимизация функции E= Σi(Sj(ti)Cj(xi,yi) – Uj(ti,xi,yi))2 затем дает временно-пространственную модель Sj(t)Cj(x,y) основного геомагнитного поля и поля коры для магнитного компонента с индексом j.
[0036] Медленно изменяющиеся компоненты основного геомагнитного поля и поля коры затем могут быть удалены из измерений, выполненных на удаленных станциях (например, P1, P2 на фиг. 1) путем вычитания линий линейной регрессии, сплайновых или временно-пространственных моделей из 3-компонентных измерений. Остатки от вычитания представляют магнитное возмущающее поле в каждом из компонентов на каждой из удаленных площадок (например, P1, P2). Вышеуказанные затем представляют собой 3n «входные каналы».
[0037] В некоторых примерах может быть необходимо визуально изучать записи данных, выполненные локальным магнитным вариометром, и вводить поправку записанных данных на какие-либо пики, возникающие вследствие аппаратурных помех или искусственных возмущений.
[0038] Затем линии регрессии или сплайны с таким же разделением узлов, как описано выше, могут быть подогнаны для каждого из 3-компонентных измерений от локального вариометра. Затем можно вычесть линии регрессии или сплайны из 3-компонентных данных, измеренных на локальной площадке вариометра R. Остатки (разности) представляют магнитное возмущающее поле на локальном участке. Эти разности представляют собой 3 «выходных канала».
[0039] Геомагнитная передаточная функция между 3n входными каналами и 3 выходными каналами может быть вычислена, например, используя метод, такой как описанный в работе Egbert, G. D. and J. R. Booker, Robust estimation of geomagnetic transfer functions, Geophys. J. R. Astr. Soc, 87, 173-194 (1986), или следующий пример метода, описанный ниже.
[0040] Передаточная функция многоканального входа – многоканального выхода (multiple-input multiple-output, MIMO), может быть вычислена между 3n входными каналами (например, X, Y и Z для каждой удаленной станции) и 3 выходными каналами следующим образом. Обозначим 3n входные каналы как Uj с j = 1, ..., 3n, а выходные каналы – как Vk с k = 1, 2, 3.
[0041] Преобразование из Uj в соответствующий выходной канал Vk может быть выполнено в частотной области для движущегося окна. Пусть индекс i обозначает положение i-того окна. Применение быстрого преобразования Фурье (FFT) к 3n входным каналам i-того окна представляет комплексные коэффициенты Фурье Ũj,i(ωl), по одному для каждой частоты ωl. Преобразование Фурье выходного канала  может затем быть рассчитано из трех входных каналов, используя отношение:
может затем быть рассчитано из трех входных каналов, используя отношение:
[0042]

[0043] Следует заметить, что все коэффициенты в вышеуказанном отношении являются комплексными, а именно, они имеют мнимую часть и действительную часть. В матричной записи матрица выходных коэффициентов  FFT связана с матрицей входных коэффициентов Ũ FFT посредством матрицы T передаточной функции:
FFT связана с матрицей входных коэффициентов Ũ FFT посредством матрицы T передаточной функции:
[0044] 
[0045] Решение методом наименьших квадратов для T затем может быть дано выражением:
[0046] 
[0047] Таким образом, матрица T передаточной функции может быть вычислена из оконных преобразований Фурье входных и выходных каналов путем стандартного обращения метода наименьших квадратов. Однако результирующая матрица T передаточной функции может быть искаженной и, следовательно, может нуждаться в сглаживании путем применения фильтра в частотной области.
[0048] Результатом указанной процедуры является плавная матрица T передаточной функции, связывающая входные каналы на удаленных площадках мониторинга P1, P2 с выходными каналами на локальной площадке вариометра R.
[0049] Указанные операции могут быть повторены для всех перестановок подмножеств удаленных станций. В случае недоступности одной или больше удаленных площадок (например, P1, P2), с помощью указанного метода затем могут быть вычислены магнитные возмущения на локальных площадках R.
[0050] Используя матрицу T передаточной функции, затем может быть вычислено локальное геомагнитное опорное поле на площадке S с локальной станцией мониторинга или без нее (например, в R). Настоящий метод будет работать для настоящего измерения и прошлого, даже для периодов до использования локального магнитного вариометра, пока одна или больше из удаленных станций уже была в действии в течение предыдущих периодов.
Для использования указанного метода могут быть осуществлены следующие действия:
[0051] (a) проверка качества измерений на всех удаленных площадках и поправка для пиков, возникающих вследствие аппаратурных помех, искусственных возмущений и сдвигов базисной линии;
[0052] (b) подгонка и вычитание линии линейной регрессии, сплайнов или временно-пространственных моделей, представление геомагнитного поля и поля коры, из всех компонентов на всех удаленных площадках. Линии регрессии или сплайны могут быть экстраполированы вперед во времени, чтобы избежать необходимости их повторного вычисления на каждом временном шаге. Остатки измерений на удаленных площадках после вычитания линий регрессии, сплайнов или временно-пространственных моделей образуют входные каналы.
[0053] Матрицу T передаточной функции, вычисленную, как указано выше, применяют для входных каналов, либо используя оконное преобразование Фурье, либо вейвлет-преобразование в частотной области, или путем выполнения эквивалентного свертывания во временной области, чтобы вычислять выходные каналы. Выходные каналы образуют расчетное возмущающее поле на локальной площадке R.
[0054] Для определения места, глубины и даты использования к расчету возмущающего поля можно добавить глобальную модель основного геомагнитного поля и поправку на кору (при необходимости). Это дает конечное геомагнитное опорное поле для любого данного случая и местоположения на локальной площадке S.
[0055] На фиг. 4 показан пример вычисления возмущающего поля в обсерватории Бэрроу (Barrow), поддерживаемой геологической службой США из измерений вблизи обсерватории Дедхос (Deadhorse). Измеренное возмущающее поле показано кривой 14, расчетная кривая из измерений в Дедхос с использованием передаточной функции, вычисленная, как указано выше, показана кривой 12, и вычисленная с использованием метода IIFR, известного до настоящего изобретения, показана кривой 10. Обратное вычисление (измерение в Дедхос и вычисление в Бэрроу) показано на фиг. 5. Измеренное значение показано кривой 20, расчетная кривая передаточной функции показана кривой 18, и расчетная кривая IIFR показана кривой 16.
[0056] После оценки матрицы передаточной функции матрица передаточной функции может быть применена к 3n входным каналам в течение периода использования локального вариометра (например, в R на фиг. 1), и расчетный выход может быть сравнен с измеренными выходными каналами из вариометра. Согласование между расчетными и измеренными выходными каналами обеспечивает надежную проверку того, подходят ли выбранные удаленные станции для вычисления возмущающего поля на локальной площадке. В противном случае могут быть использованы дополнительные удаленные станции, чтобы улучшить вычисление возмущающего поля на локальной площадке.
[0057] Вариометр может продолжать использоваться на локальной площадке (R на фиг. 1) в течение, например, операций размещения скважины. Вычисление передаточной функции затем может регулярно проверяться по сравнению с магнитными элементами, измеренными вариометром. Можно также непосредственно использовать измерения вариометра в качестве геомагнитного опорного поля на локальной площадке. Однако непрерывная доступность точных измерений от локально используемого вариометра может быть не гарантирована. Чтобы избежать простоев и повысить надежность метода согласно настоящему изобретению, предпочтительно вычислять возмущающее поле на локальной площадке из множества удаленных станций и использовать измерения на локальной площадке только для подтверждения достоверности и/или улучшения удаленных вычислений. Вышеуказанные примеры удаленных геодезически привязанных площадок и космической станции являются только примерами и не служат для ограничения объема настоящего изобретения.
[0058] При направленном бурении скважины вычисленное полное геомагнитное поле и наклонение могут быть сравнены с геомагнитной инклинометрией MWD, выполненной в подземной скважине. Метод подтверждения требует, чтобы устройства MWD были тщательно откалиброваны и магнитное влияние бурильной колонны поддерживалось на минимальном уровне путем использования немагнитного BHA. Разность между вычисленным и полученным путем съемки MWD полным геомагнитным полем и наклонением затем может быть показателем качества вычислений геомагнитного азимута. Вычисление может считаться находящимся «в пределах технических требований», если разность для полного поля и наклонения попадает в пределы заданных пороговых значений. Похожая проверка достоверности может быть выполнена в других применениях, при условии, что измерения применения являются достаточно качественными и наличие магнитного влияния может быть исключено.
[0059] Во время и после применения указанного метода компоненты геомагнитного поля, вычисленные с помощью описанного способа, дают возможность управления локальными геомагнитными измерениями. Это возможно, поскольку сочетание магнитометрических и акселерометрических измерений в типичном устройстве MWD обеспечивает вычисление не только геомагнитного азимута, но и напряженности и наклонения геомагнитного поля. Измерения наклонения и напряженности могут быть сравнены с расчетной напряженностью и наклонением, чтобы выполнять контроль качества измерений геомагнитного поля в соответствии с настоящим методом и проверять наличие внешнего магнитного влияния, которое может препятствовать правильному функционированию метода.
[0060] Например, подтверждение съемки MWD скважины может выполнено следующим образом: для каждой съемки MWD сравнение измеренного полного поля и наклонения с конечными опорными значениями, вычисленными, как указано выше. Если разность между измеренным и рассчитанным значениями является, самое большее, выбранным пороговым значением, съемка MWD может считаться достоверной. В другом варианте осуществления вместо квалификации отдельных съемок MWD, может быть выполнен многостанционный анализ (Multi-Station Analysis, MSA), см. статью № 49060, Society of Petroleum Engineers, Richardson, TX, для ряда съемок MWD, происходящих из той же скважины или того же выполнения на BHA, чтобы компенсировать смещение инструмента MWD, масштабные факторы и влияние бурильной колонны. Критерий приемлемости качества MSA затем может быть применен к съемкам MWD после применения MSA.
[0061] На фиг. 6 проиллюстрирована система буровой площадки, в которой могут быть использованы аспекты настоящего изобретения. Скважина может быть на берегу или на море. В данном примере системы ствол скважины формируется в подземных формациях путем роторного бурения хорошо известным способом.
[0062] Бурильная колонна 225 подвешена в стволе скважины 236 и имеет компоновку низа бурильной колонны (bottom hole assembly, BHA) 240, которое включает в себя буровое долото 246 на нижнем конце. Наземная система 220 включает в себя узел платформы и буровой вышки, расположенной над стволом скважины 236, узел, включающий в себя стол 224 ротора, ведущую бурильную трубу (не показано), крюк 221 и вертлюг 222. Бурильная колонна 225 вращается посредством стола 224 ротора, питающегося от не показанных устройств, которые взаимодействуют с ведущей бурильной трубой (не показано) на верхнем конце бурильной колонны 225. Бурильная колонна 225 подвешена на крюке 221, прикрепленном к талевому блоку (также не показан), с помощью ведущей бурильной колонны (не показана) и вертлюга 222, который обеспечивает вращение бурильной колонны 225 относительно крюка 221. Как хорошо известно, система верхнего привода может быть использована вместо системы, показанной на фиг. 6.
[0063] В показанном примере наземная система, кроме того, содержит буровую жидкость или буровой раствор 232, сохраняющийся в резервуаре 231, созданном на буровой площадке. Насос 233 подает буровой раствор внутрь бурильной колонны 225 через канал (не показано) в вертлюге 222, принуждая буровой раствор течь вниз через бурильную колонну 225, как показано стрелкой 234. Буровой раствор поступает в бурильную колонну по каналам (не показано) в буровое долото 246, а затем циркулирует вверх через область 235 кольцевого зазора между наружной частью бурильной колонны 225 и стенкой ствола скважины 236, как показано стрелками 235 и 235A. В данном хорошо известном способе буровой раствор смазывает буровое долото 246 и выносит обломки породы наверх, на поверхность, когда возвращается в резервуар 231 для рециркуляции.
[0064] BHA 240 в показанном варианте осуществления может включать в себя устройство 241 для измерений в процессе бурения (measuring-while-drilling, MWD), устройство 244 каротажа в процессе бурения (logging-while-drilling, LWD), роторную управляемую систему 245 направленного бурения, и двигатель, и буровое долото 250. Также должно быть понятно, что может использоваться больше чем одно устройство LWD и/или устройство MWD, например, как представлено в 243.
[0065] Устройство 244 LWD установлено в специальном типе бурильной трубы, как известно в технике, и может содержать один или множество известных типов каротажных устройств. Устройство LWD может включать в себя возможности измерения, обработки и сохранения информации, а также связи с наземным оборудованием.
[0066] Устройство 241 MWD также установлено в специальном типе бурильной трубы, как известно в технике, и может содержать одно или несколько устройств для измерения характеристик бурильной трубы и бурового долота. Устройство 241 MWD может, кроме того, включать в себя устройство 242 для генерации электроэнергии для системы, установленной в скважине. Оно обычно может включать в себя турбогенератор бурового раствора, приводимый в действие потоком бурового раствора, понятно, что может быть использована другая система питания и/или аккумуляторных батарей. В настоящем варианте осуществления устройство 241 MWD может включать в себя один или больше следующих типов измерительных устройств: устройство измерения нагрузки на долото, устройство измерения крутящего момента, устройство измерения вибрации, устройство измерения ударной нагрузки, устройство измерения неравномерности вращения, устройство измерения направления (например, датчик направления трех компонентов геомагнитного поля) и устройство измерения наклонения, такое как трехкомпонентный акселерометр. Устройство 242 генерации энергии может также содержать модулятор потока бурового раствора для передачи результатов измерений и/или сигналов о состоянии устройства на поверхность для регистрации и интерпретации с помощью блока 226 каротажа и управления. В случаях, когда ствол скважины отклонен от вертикали, вращение бурильной колонны (или BHA, если используют двигатель, расположенный в бурильной колонне) может быть использовано для получения результатов измерений, которые восприимчивы предпочтительно к стволу и предпочтительно к формации, вследствие того, что бурильная колонна будет иметь тенденцию опираться на гравитационно-нижнюю сторону ствола скважины. В выбранные моменты времени операции бурения могут быть временно приостановлены, а датчик направления и датчик наклонения может быть использован для определения азимута и наклонения скважины при наклонном бурении. Азимут, который может быть определен путем измерений магнитного поля Земли, может быть скорректирован, используя способы, указанные выше, для получения геодезического азимута, более точного, чем при использовании метода IIFR, известного до настоящего изобретения. Измерения азимута и наклонения могут быть использованы для обеспечения возможности бурения вдоль выбранной траектории при соответствующем действии управляемого забойного двигателя или вращающейся управляемой системы 245 направленного бурения.
[0067] Также можно откорректировать данные ранее выполненной магнитометрической инклинометрии, произведенной с помощью устройств, таких как устройства MWD, путем определения возмущающего поля на площадке S, используя передаточную функцию, определенную по измерениям удаленной площадки во время ранее выполненной инклинометрии. Любые другие измерения магнитных элементов могут быть аналогично откорректированы для моментов времени до использования вариометра на площадке R вблизи площадки S, используя такой же способ.
[0068] Хотя изобретение было описано в отношении ограниченного числа вариантов осуществления, специалисты в данной области, благодаря использованию преимуществ настоящего изобретения, могут разработать другие варианты осуществления, которые не отклоняются от объема настоящего изобретения, раскрытого в настоящем документе. Соответственно, объем изобретения должен быть ограничен только прилагаемыми пунктами формулы изобретения.


Группа изобретений относится к геомагнитной съемке для многочисленных применений, таких как навигация, определение ориентации управления движущимися объектами, в частности направленное бурение. Техническим результатом является повышение точности получения результатов геомагнитной съемки для обеспечения повышения эффективности ее применения в области направленного бурения скважин. В частности, предложен способ вычисления локального геомагнитного возмущающего поля, согласно которому: измеряют элементы магнитного поля Земли по меньшей мере в одном известном геодезическом положении; измеряют элементы магнитного поля Земли в положении вблизи местоположения, в котором должно быть вычислено локальное геомагнитное возмущающее поле; определяют функцию возмущения из измерений магнитного поля Земли, выполненных по меньшей мере в одном известном геодезическом положении, и вычисляют передаточную функцию измерения магнитного возмущающего поля между по меньшей мере одним известным геодезическим положением и ближним положением для расчета локального геомагнитного возмущающего поля в ближнем положении. Причем вычисление передаточной функции магнитного возмущающего поля включает в себя вычисление оконного преобразования Фурье, измерений по меньшей мере в одном известном геодезическом положении и измерений в ближнем положении с помощью обращения методом наименьших квадратов. 4 н. и 21 з.п. ф-лы, 6 ил.
1. Способ вычисления локального геомагнитного возмущающего поля, согласно которому:
измеряют элементы магнитного поля Земли по меньшей мере в одном известном геодезическом положении;
измеряют элементы магнитного поля Земли в положении вблизи местоположения, в котором должно быть вычислено локальное геомагнитное возмущающее поле;
определяют функцию возмущения из измерений магнитного поля Земли, выполненных по меньшей мере в одном известном геодезическом положении, и
вычисляют передаточную функцию измерения магнитного возмущающего поля между по меньшей мере одним известным геодезическим положением и ближним положением для расчета локального геомагнитного возмущающего поля в ближнем положении,
причем вычисление передаточной функции магнитного возмущающего поля включает в себя вычисление оконного преобразований Фурье измерений по меньшей мере в одном известном геодезическом положении и измерений в ближнем положении с помощью обращения методом наименьших квадратов.
2. Способ по п. 1, согласно которому дополнительно используют расчетное геомагнитное возмущающее поле для коррекции геомагнитного опорного поля в указанном местоположении.
3. Способ по п. 1, согласно которому расчетное геомагнитное возмущающее поле используют для коррекции геомагнитных измерений в указанном местоположении.
4. Способ по п. 1, согласно которому измерения элементов магнитного поля земли в ближнем положении включают в себя использование вариометра.
5. Способ по п. 4, согласно которому вариометр содержит феррозондовый магнитометр.
6. Способ по п. 5, согласно которому феррозондовый магнитометр содержит три взаимно ортогональных датчика магнитного поля.
7. Способ по п. 6, согласно которому дополнительно применяют сглаживающий фильтр к выходу обращения методом наименьших квадратов.
8. Способ по п. 1, согласно которому магнитное возмущающее поле вычисляют путем вычитания компонента основного магнитного поля и компонента поля коры из измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближних положениях.
9. Способ по п. 8, согласно которому компонент основного магнитного поля и компонент поля коры определяют с помощью линейной регрессии измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближних положениях.
10. Способ по п. 8, согласно которому компонент основного магнитного поля и компонент поля коры определяют с помощью подгонки сплайнов измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближнем положении.
11. Способ по п. 1, согласно которому дополнительно используют скорректированное геомагнитное опорное поле для вычисления геодезического опорного направления из измерений магнитного поля Земли.
12. Способ по п. 1, согласно которому передаточную функцию используют для вычисления скорректированного геомагнитного опорного поля во время перед выполнением измерений в указанном местоположении.
13. Способ по п. 1, согласно которому измерение элементов магнитного поля Земли включает в себя одно из измерений в геодезически привязанном месте, на перемещающейся платформе и измерение с космической станции.
14. Способ направленного бурения скважины, согласно которому:
вводят систему измерений в процессе бурения, связанную с системой направленного бурения, в скважину, причем система измерений в процессе бурения содержит по меньшей мере один датчик магнитного поля Земли;
управляют системой направленного бурения;
в выбранные моменты времени выполняют измерения элементов магнитного поля Земли, используя по меньшей мере один датчик магнитного поля Земли;
корректируют измерения, выполненные с помощью по меньшей мере одного датчика магнитного поля Земли для магнитного возбуждающего поля, причем корректировка включает в себя измерение элементов магнитного поля Земли по меньшей мере в одном известном геодезическом положении, измерение элементов магнитного поля Земли в положении вблизи скважины, определение функции возмущения из измерений элемента магнитного поля Земли, выполненных вблизи по меньшей мере одного известного геодезического положения, вычисление передаточной функции измерения магнитного возмущающего поля между по меньшей мере одним известным геодезическим положением и ближним положением для расчета функции возмущения в ближнем положении и использование расчетной функции магнитного возмущения для корректировки геомагнитных измерений, выполненных в указанном местоположении, причем вычисление передаточной функции магнитного возмущающего поля включает в себя вычисление оконного преобразования Фурье измерений по меньшей мере в одном известном геодезическом положении и ближнем положении с помощью обращения метода наименьших квадратов, и
используют скорректированные измерения, выполненные с помощью по меньшей мере одного датчика магнитного поля в системе измерений в процессе бурения для определения геомагнитного направления скважины.
15. Способ по п. 14, согласно которому измерение по меньшей мере одного элемента магнитного поля Земли во втором положении включает в себя использование вариометра.
16. Способ по п. 15, согласно которому вариометр содержит феррозондовый магнитометр.
17. Способ по п. 16, согласно которому феррозондовый магнитометр содержит три взаимно ортогональных датчика магнитного поля.
18. Способ по п. 14, согласно которому дополнительно применяют сглаживающий фильтр к выходу обращения метода наименьших квадратов.
19. Способ по п. 14, согласно которому магнитное возмущающее поле вычисляют путем вычитания компонента основного магнитного поля и компонента поля коры из измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближнем положении.
20. Способ по п. 19, согласно которому компонент основного магнитного поля и компонент поля коры определяют с помощью линейной регрессии измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближнем положении.
21. Способ по п. 19, согласно которому компонент основного магнитного поля и компонент поля коры определяют путем подгонки сплайна измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближних положениях.
22. Способ по п. 14, согласно которому дополнительно используют скорректированные геомагнитные измерения для вычисления измерений геодезического опорного направления.
23. Способ по п. 14, согласно которому передаточную функцию используют для вычисления скорректированных геомагнитных измерений ранее разведанной скважины.
24. Способ вычисления локального геомагнитного возмущающего поля, согласно которому:
измеряют элементы магнитного поля Земли по меньшей мере в одном известном геодезическом положении;
измеряют элементы магнитного поля Земли в положении вблизи местоположения, в котором должно быть вычислено локальное геомагнитное возмущающее поле;
определяют функцию возмущения из измерений магнитного поля Земли, выполненных по меньшей мере в одном известном геодезическом положении, и при этом магнитное возмущающее поле вычисляют путем вычитания компонента основного магнитного поля и компонента поля коры из измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближних положениях, и
при этом компонент основного магнитного поля и компонент поля коры определяют с помощью по меньшей мере одного из: i) линейной регрессии, b ii) подгонки сплайнов измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближнем положении;
вычисляют передаточную функцию измерения магнитного возмущающего поля между по меньшей мере одним известным геодезическим положением и ближним положением для расчета локального геомагнитного возмущающего поля в ближнем положении.
25. Способ направленного бурения скважины, согласно которому:
вводят систему измерений в процессе бурения, связанную с системой направленного бурения, в скважину, причем система измерений в процессе бурения содержит по меньшей мере один датчик магнитного поля Земли;
управляют системой направленного бурения;
в выбранные моменты времени выполняют измерения элементов магнитного поля Земли, используя по меньшей мере один датчик магнитного поля Земли;
корректируют измерения, выполненные с помощью по меньшей мере одного датчика магнитного поля Земли, для магнитного возбуждающего поля, причем корректировка включает в себя измерение элементов магнитного поля Земли по меньшей мере в одном известном геодезическом положении, измерение элементов магнитного поля Земли в положении вблизи скважины, определение функции возмущения из измерений элемента магнитного поля Земли, выполненных вблизи по меньшей мере одного известного геодезического положения, при этом магнитное возмущающее поле вычисляют путем вычитания компонента основного магнитного поля и компонента поля коры из измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближних положениях, и
при этом компонент основного магнитного поля и компонент поля коры определяют с помощью одного из: i) линейной регрессии, b ii) подгонки сплайнов измерений, выполненных по меньшей мере в одном известном геодезическом положении и ближнем положении; вычисляют передаточную функцию измерения магнитного возмущающего поля между по меньшей мере одним известным геодезическим положением и ближним положением для расчета локального геомагнитного возмущающего поля в ближнем положении, и
используют скорректированные измерения, выполненные с помощью по меньшей мере одного датчика магнитного поля в системе измерений в процессе бурения для определения геомагнитного направления скважины.
| Способ поиска месторождений нефти и газа | 1980 |
|
SU1264122A1 |
| Способ определения изменений напряженного состояния элементов горных выработок,склонных к оползнеобразованию | 1982 |
|
SU1087662A1 |
| ФЕРРОЗОНДОВЫЙ ВАРИОМЕТР | 0 |
|
SU266051A1 |
| СПОСОБ МОНИТОРИНГА ЛОКАЛЬНЫХ НЕОДНОРОДНОСТЕЙ И ГЕОДИНАМИЧЕСКИХ ЗОН ВЕРХНЕЙ ЧАСТИ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА ВЧР | 2008 |
|
RU2363965C1 |
| Способ определения азимута | 1986 |
|
SU1377377A1 |
| СПОСОБ ОБНАРУЖЕНИЯ РЕГИОНАЛЬНЫХ ЗОН ПОВЫШЕННОЙ ТРЕЩИНОВАТОСТИ И ГЛУБИННЫХ РАЗЛОМОВ ЛИТОСФЕРЫ | 2002 |
|
RU2226283C1 |
| US 6021577 A1, 08.02.2000. | |||

