ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к внутрискважинной дальнометрии и, в частности, к дальномерной системе, использующей магнитный маяк для направления одного ствола скважины по отношению к другому стволу скважины.
УРОВЕНЬ ТЕХНИКИ
Так как за последнее столетие истощились легкодоступные и несложные в отношении добычи ресурсы углеводородного сырья, в распоряжении остаются все более и более сложные для разработки скважины. Кроме того, поскольку постоянно растет глобальный спрос на углеводороды, для удовлетворения этого спроса требуется разработка более усовершенствованных методов добычи, часто называемых в промышленности комплексным освоением добычи и методами добычи. Эти методы включают, например, парогравитационный дренаж («SAGD»), термогравитационный дренаж («TAGD»), внутрипластовое горение с вертикальной воздухонагнетательной скважиной и горизонтальной добывающей скважиной («THAI»), добычу посредством испаряющегося углеводородного растворителя («VAPEX») и внутрипластовое горение. Такие методы решают проблему подвижности скважин, содержащих тяжелую нефть, посредством термического и/или химического изменения вязкости битума для обеспечения несложной добычи.
Хотя каждая из комплексных технологий освоения предлагает решение задачи, связанной с добычей тяжелой нефти, все они связаны с общей сложной задачей, относящейся к строительству ствола скважины, а именно точному размещению смежных локальных скважин с обсаженным забоем. С помощью SAGD и TAGD нагнетательные скважины должны быть точно размещены в пределах нескольких метров от добывающей скважины, при этом нагнетательную скважину размещают на несколько метров выше добывающей скважины. Обычно этого достигают путем размещения устья как нагнетательной, так и добывающей скважины в пределах нескольких метров на поверхности. Поэтому вторая скважина, пробуренная в скважинной паре, «следует» за обсаженным стволом скважины с применением способа магнитной дальнометрии.
Однако ввиду таких вопросов, как ограничения площади застройки местности, внутрипромысловые требования в отношении бурения и размещение добывающей скважины, нередко является желательным, чтобы новая добывающая скважина или нагнетательная скважина были пробурены в отдельном местоположении. Это местоположение часто выбирают таким образом, чтобы к концу боковой in situ скважины приближалась новая буровая скважина с противоположной стороны. Однако в связи с увеличением расстояния от одного устья скважины до другого устья скважины и неопределенностью, связанной с проведением традиционной геодезической разведки на основании гравитационного и магнитного полей Земли, невозможно достичь точности в расстоянии между двумя скважинами. Кроме того, в случае способа THAI необходимо, чтобы подножье горизонтального обсаженного ствола скважины пересекалось с наклонно направленной скважиной, а этого невозможно достичь лишь с помощью обычных методов геодезической разведки.
Для удовлетворения требования в отношении точного размещения ствола скважины в рамках этих «противоположно азимутальных» способов комплексного освоения применяют отраслевые стандартные инструменты магнитной дальнометрии, такие как инструмент наведения по магнитному полю («MGT») и вращающееся вспомогательное устройство магнитной дальнометрии («RMRS»). Однако эти методы не являются оптимальными, так как точность данной системы в диапазоне, требуемом для конкретного применения, ограничена. Это ограничение выражается на практике в эксплуатационной неэффективности, когда часто требуются боковые стволы для обеспечения пересечения или необходимо точное разделение. Эти эксплуатационные неэффективности также могут выражаться в неэффективности при освоении и добыче из скважины, так как разделение скважин и/или точка пересечения недостаточно оптимальны.
В рамках некоторых комплексных проектов построения стволов скважин основной целью является не добыча углеводородного сырья, а, скорее, транспортировка углеводородов. В проектах по транспортировке углеводородов два ствола скважин, пробуренные из противоположных направлений, часто пересекаются для образования общего ствола скважины. Это «U-трубное» сообщение между стволами скважин дает возможность осваивать глубокие подземные стволы скважин с помощью обычной обсадной колонны и использовать их в качестве трубопровода для транспортировки углеводородного сырья. В то время как в прошлом подобные проекты выполнялись при помощи обычных методов магнитной дальнометрии, те же недостатки, связанные с этими методами, что и описанные выше, приводили и приводят к увеличению издержек и повышению общей эксплуатационной эффективности.
Соответственно, в данной области техники существует потребность в усовершенствованных методах внутрискважинной дальнометрии для преодоления указанных и других недостатков традиционных методик.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
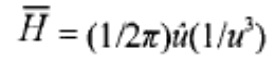
Фиг. 1А иллюстрирует дальномерную систему, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
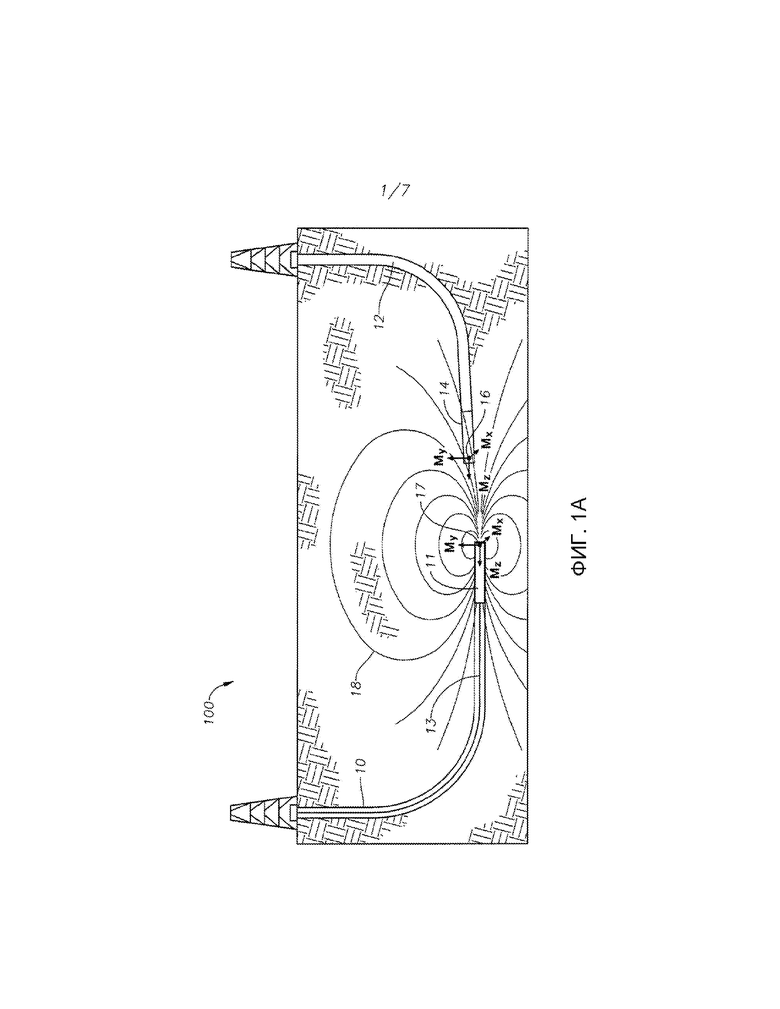
Фиг. 1В иллюстрирует сценарии альтернативного подхода в отношении бурового оборудования, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
Фиг. 1С иллюстрирует «зону подхода» бурового оборудования, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
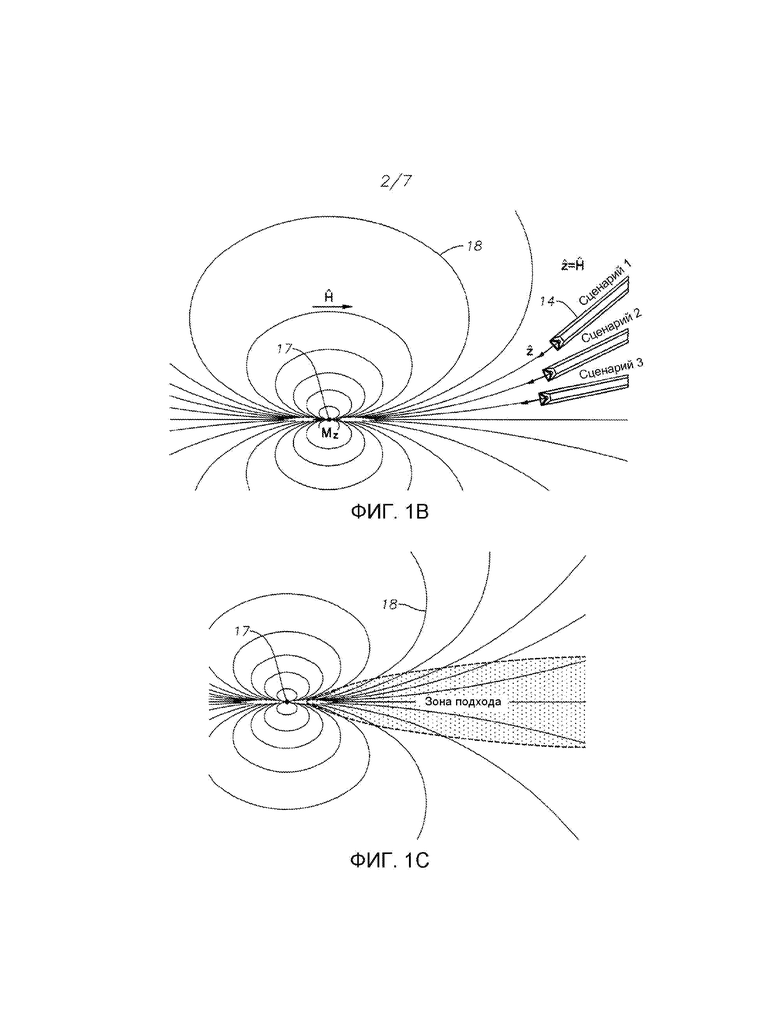
Фиг. 2А иллюстрирует магнитные поля в поперечном сечении от маяка, который ориентирован горизонтально вдоль оси А, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
Фиг. 2B иллюстрирует маяк, ориентированный под углом 45 градусов вдоль оси В, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
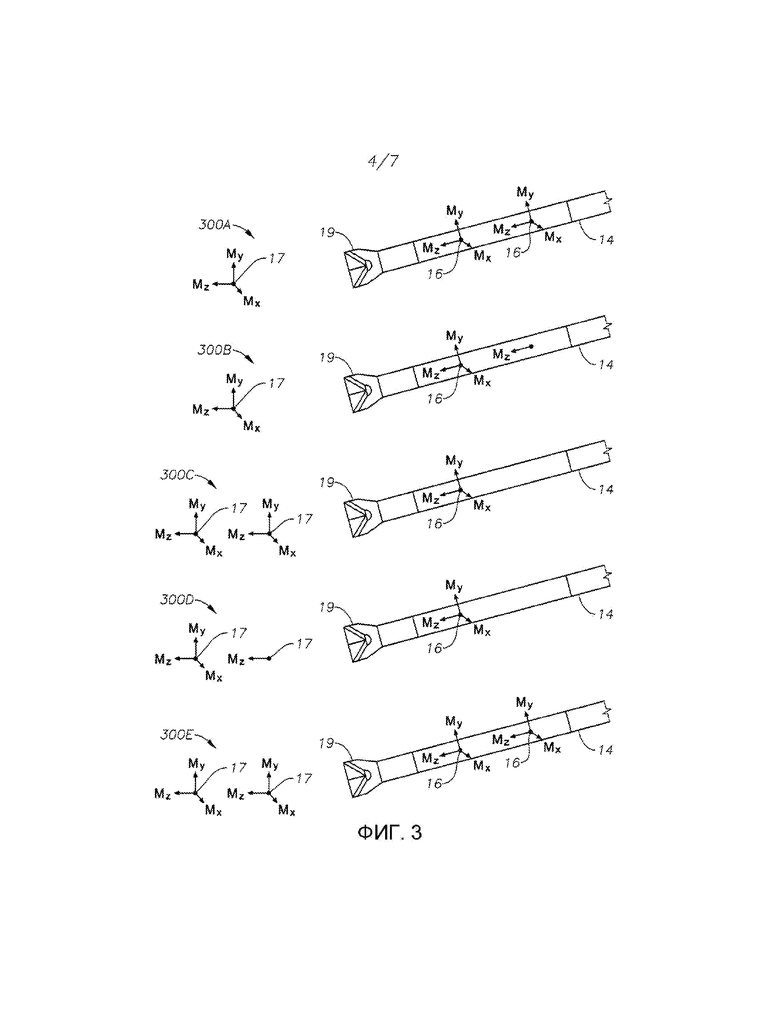
Фиг. 3 иллюстрирует множество дипольных конфигураций маяка/приемника дальномерных систем, в соответствии с альтернативными вариантами реализации данного изобретения;
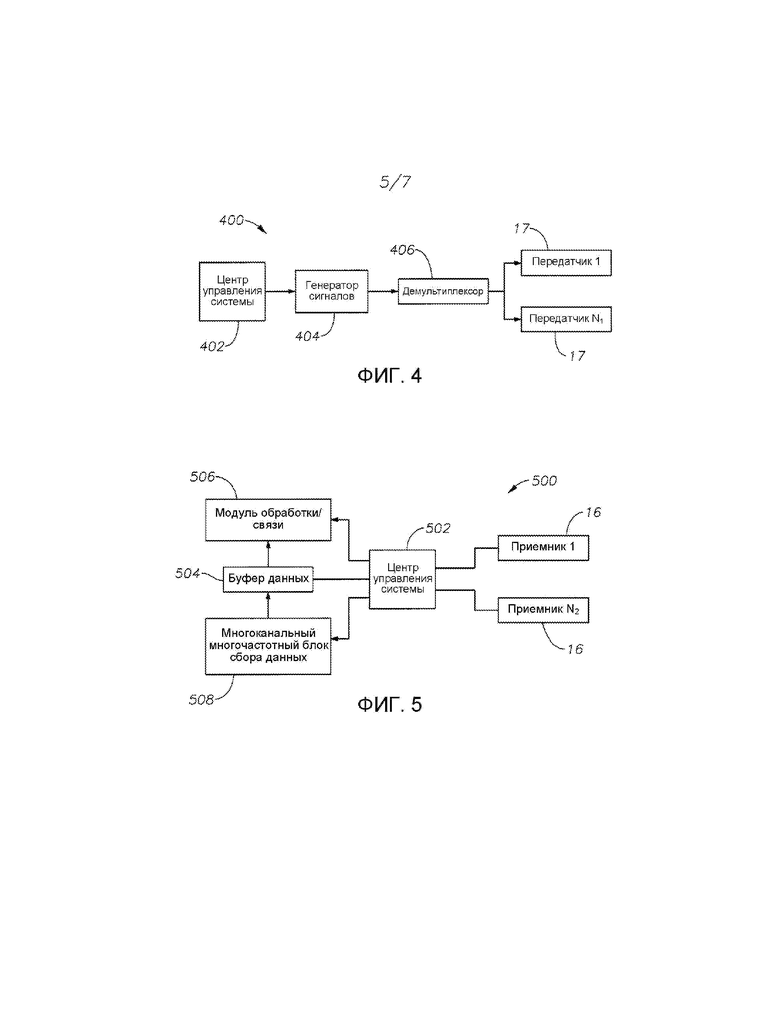
Фиг. 4 представляет собой блок-схему системной схемы для маяка, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
Фиг. 5 представляет собой блок-схему системной схемы, применяемой для приемного диполя, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения;
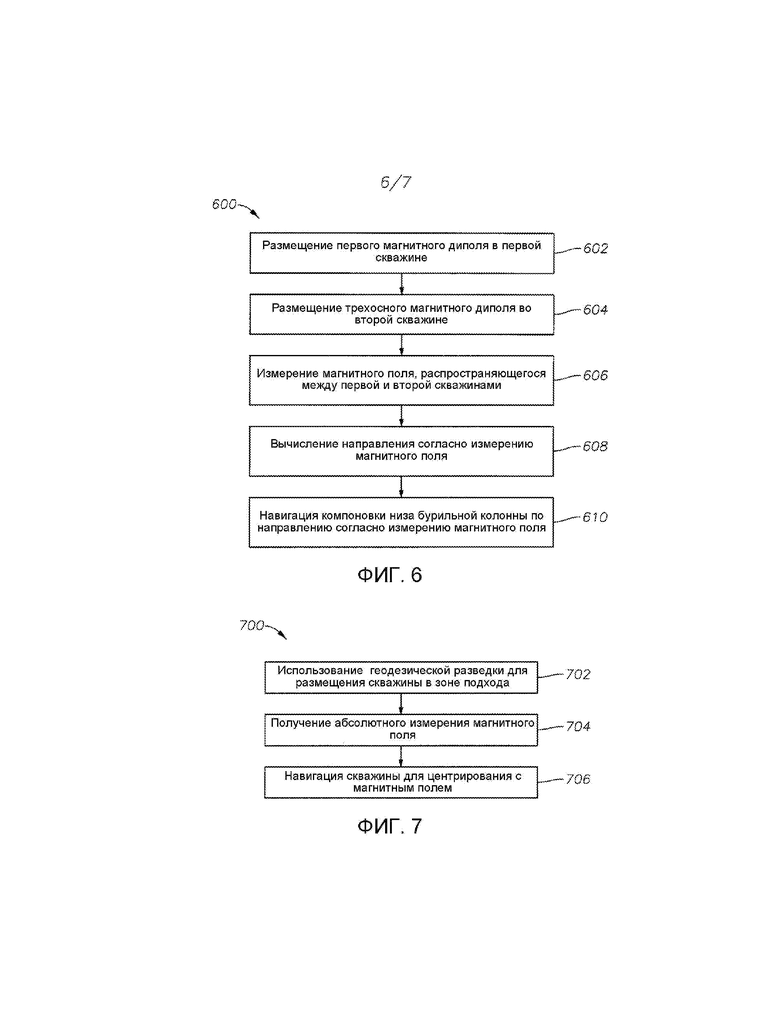
Фиг. 6 представляет собой блок-схему обобщенного способа дальнометрии, применяемого для определения относительного положения стволов первой и второй скважины, в соответствии с определенными приведенными в качестве примера способами по данному изобретению; и
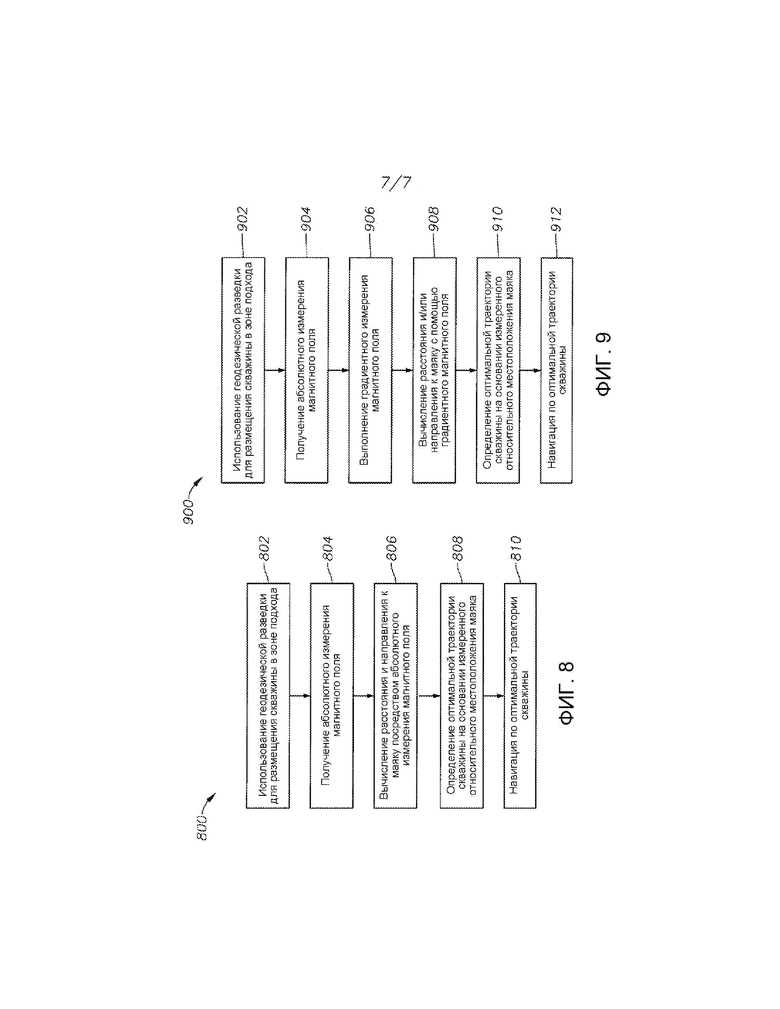
Фиг. 7, 8 и 9 представляют собой блок-схемы альтернативных способов определения относительного положения стволов первой и второй скважины, в соответствии с определенными приведенными в качестве примера способами по данному изобретению.
ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Дальше описаны иллюстративные варианты реализации изобретения и связанные с ними методики по данному изобретению, которые могут быть применены в дальномерной системе и способе с использованием маяка магнитного диполя для направления одного ствола скважины по направлению к другому стволу скважины. В целях ясности в данном описании приведены не все особенности фактической реализации или методики. Конечно, следует иметь в виду, что в разработке любого такого фактического варианта реализации изобретения должны быть приняты многочисленные специфичные для реализации изобретения решения с целью достижения конкретных целей разработчиков, таких как удовлетворения связанных с системой и бизнесом ограничивающих условий, которые будут изменяться от одной реализации изобретения к другой. Кроме того, следует иметь в виду, что такая работа по разработке может быть сложным и трудоемким процессом, тем не менее она будет рутинным мероприятием для специалистов в данной области техники, извлекающих пользу из ознакомления с данным изобретением. Дальнейшие аспекты и преимущества различных вариантов реализации изобретения и связанных с ними методик по данному изобретению станут очевидными из рассмотрения нижеследующего описания и графических материалов.
Как описано в данном документе, настоящее раскрытие описывает приведенные в качестве примера способы и системы дальнометрии, в которых используется маяк магнитного диполя для направления одного ствола скважины по направлению к другому стволу скважины. В обобщенном варианте реализации изобретения маяк индуцирует низкочастотные магнитные поля в пласт из ствола первой скважины, которые затем обнаруживаются одним или более диполей (действующих в качестве приемников) в стволе второй скважины. Маяк и/или принимающие диполи представляют собой магнитные диполи, и в некоторых вариантах реализации изобретения один или оба из них могут представлять собой трехосный магнитный диполь. Тем не менее, в любом варианте реализации изобретения магнитные поля, излучаемые маяком, образуют естественную траекторию подхода к стволу первой скважины. В результате этого ствол второй скважины можно направлять для центрирования с направлением магнитного поля, которое будет автоматически создавать идеальный подход к стволу первой скважины.
Фиг. 1А-1С приведены для иллюстрации этой обобщенной сущности данного изобретения. Фиг. 1А иллюстрирует приведенную в качестве примера дальномерную систему 100 в соответствии с данным изобретением, которая может быть использована, например, в применении SAGD. В данном случае первая скважина 10 (например, ствол добывающей скважины) была пробурена с использованием любого пригодного метода бурения, и компоновку низа бурильной колонны 11 размещают, например, при помощи каротажной проволоки 13. Компоновка низа бурильной колонны 11 содержит магнитный диполь 17, выступающий в качестве маяка. Маяк 17 может принимать различные формы, включая, например, соленоид или магнитометр. В этом варианте реализации изобретения диполь 17 представляет собой трехосный магнитный диполь, расположенный вблизи подножья первой скважины 10. Затем вторую скважину 12 (например, ствол нагнетательной скважины) бурят посредством бурового оборудования 14, которое может представлять собой, например, оборудование каротажа во время бурения («КВБ»), оборудование измерений во время бурения («ИВБ») или другое требуемое буровое оборудования. В этом приведенном в качестве примера варианте реализации изобретения буровое оборудование 14 включает компоновку низа бурильной колонны, содержащую трехосный магнитный диполь 16, выступающий в качестве приемника. Однако следует отметить, что диполи 16 и 17 могут выступать в качестве маяка или приемника и могут принимать форму других вариантов реализации диполя, которые отличаются от трехосных.
Как будет описано более подробно дальше, в процессе типовых буровых работ с применением соответственной системы позиционирования 100 маяк 17 излучает низкочастотные магнитные поля 18, которые распространяются в направлении второй скважины 12. Магнитные поля 18 образуют естественную траекторию подхода, и по необходимости их использует буровое оборудование 14 для проведения направленного бурения второй скважины 12. Для достижения этой цели локальная или удаленная схема обработки вычисляет направление магнитных полей 18 и использует эти данные для определения расстояния и направление до маяка 17 внутри первой скважины 10. Как только относительное положение определено, данная схема по необходимости генерирует сигналы, необходимые для управления буровым оборудованием 14 в нужном направлении для пересечения с первой скважиной 10 или для ее обхода.
Для дальнейшего обобщения цели этого описания изобретения Фиг. 1В иллюстрирует альтернативные сценарии подхода бурового оборудования 14, а Фиг. 1С иллюстрирует «зону подхода» бурового оборудования 14. Первая скважина 10 не проиллюстрирована для простоты изложения. Как проиллюстрировано на Фиг. 1В, в каждом сценарии подхода 1-3 буровое оборудование 14 направляет вторую скважину 12 в направлении Н магнитного поля 18, которое естественным путем соединяет обе скважины. Если такое пересечение не требуется, другие приведенные в качестве примера варианты реализации данного изобретения используют градиенты магнитного поля для определения расстояния и направления до маяка 17, когда скважины достаточно сближаются друг с другом, и эти скважины могут быть направлены по траектории идеального подхода (такие как конфигурация нагнетательной/добывающей скважины с применением SAGD). В других приведенных в качестве примера вариантах реализации изобретения направленность маяка 17 может быть скорректирована на основании требуемого угла подхода, обеспечивая тем самым идеальный подход в зоне подхода, как проиллюстрировано на Фиг. 1С.
Хотя данное изобретение описано в контексте применения SAGD, оно может использоваться во множестве других применений, которые точно и надежно позиционируют скважину, в которой производят бурение, по отношению к близлежащей скважине. Такие применения могут включать, например, бурение рельефных скважин и/или работы по обходу скважин. В применении обхода скважин скважину бурят с применением системы позиционирования, описанной в данном документе, которая активно ищет магнитные поля, излучаемые маяком в траектории бурения. Если такие скважины или структуры обнаруживаются, система позиционирования соответственно изменяет траекторию бурения. При разгрузочном бурении ствол первой скважины может представлять собой самоизливающуюся скважину, а ствол второй скважины представляет собой пересекающую скважину, используемую для прекращения разливов углеводородного сырья, выходящего из первой скважины. В этом случае пересекающая скважина может быть, по существу, перпендикулярной другой скважине. В еще других вариантах реализации изобретения вторая скважина может быть пробурена таким образом, что ее конец пересекается с подножьем ствола первой скважины для образования U-образной конфигурации.
Далее будет описано функционирование приведенного в качестве примера магнитного маяка. Фиг. 2A и 2B иллюстрируют функционирование магнитного маяка, ориентированного под углом 0 градусов и 45 градусов, соответственно, в соответствии с приведенными в качестве примера вариантами реализации данного изобретения. Магнитное поле Н от магнитного диполя (например, излучаемое маяком 17 или приемником 16) на низких частотах не зависит от удельного сопротивления пластов, и оно может быть рассчитано по формуле:
 Уравнение (1),
Уравнение (1),
где  представляет собой единичный вектор, указывающий от маяка на антенну в другой скважине, и
представляет собой единичный вектор, указывающий от маяка на антенну в другой скважине, и  является единичным вектором в направлении измерения магнитного поля.
является единичным вектором в направлении измерения магнитного поля.
Фиг. 2А иллюстрирует магнитные поля в поперечном сечении от маяка 17, который ориентирован горизонтально вдоль оси A, в то время как Фиг. 2В иллюстрирует маяк 17, ориентированный под углом 45 градусов вдоль оси В. Как видно, магнитные поля 18 распространяться от одного полюса до другого по приблизительно круговой схеме, при этом каждая силовая линия магнитного поля возникает и прерывается в местоположении магнитного диполя. Поля 18, которые находятся вокруг магнитного диполя 17 (в приблизительно радиальном направлении), проявляют в основном круговую схему в объеме работы. В результате этого они не могут быть эффективно использованы для направления компоновки низа бурильной колонны 14. Однако поля 18, которые находятся приблизительно в осевом направлении (смежные оси А, B) от маяка 17 диполя, следуют линейной или криволинейной схеме, обозначающей беспрепятственный подход к местоположению маяка. Ориентация каждого маяка обеспечивает беспрепятственный подход со стороны определенной зоны подхода, как проиллюстрировано на Фиг. 1С. Если требуется подход со стороны другой зоны подхода, ориентация маяка может быть изменена для указания на эту зону, как проиллюстрировано на Фиг. 2В.
Существуют различные способы изменения ориентации маяка. Например, изменение ориентации маяка может быть выполнено механически путем физического вращения антенны в требуемом направлении. Это также может быть достигнуто синтетически, путем регулирования относительных мощностей нескольких антенн, которые составляют маяк, в случае реализации маяка с несколькими антеннами, направленными в разные стороны.
В некоторых приведенных в качестве примера вариантах реализации данного изобретения угол маяка 17 может изменяться с учетом времени для оптимизации скважинной траектории подхода. В одном варианте реализации изобретения регулировка может быть выполнена вручную или автоматически с помощью электрической системы, которая определяет идеальный угол на основании абсолютного и относительного местоположения скважин. В других вариантах реализации изобретения ориентация также может регулироваться для того, чтобы найти или поддерживать минимальный или максимальный сигнал на приемнике в другой скважине. В еще других вариантах реализации изобретения ориентация маяка, при которой достигаются максимальные осевые или итоговые полученные поля, может поддерживаться для оптимизации операции управления. Ориентация маяка может также использоваться наряду с данными геодезической разведки, полученными из второй скважины, для триангуляции или расположения второй скважины по отношению к первой скважине, при этом данные о местоположении могут быть использованы для оптимизации траектории скважины.
В других вариантах реализации изобретения несколько ориентаций маяка могут быть установлены в одинаковом положении вдоль ствола скважины путем размещения нескольких сочетаемых или расположенных в шахматном порядке магнитные диполей и путем изменения уровней сигнала таких диполей для установления различных ориентаций магнитного диполя. Например, трехосный маяк может быть использован для синтеза любой произвольной ориентации маяка на основании взвешенной комбинации всех трех осей. Кроме того, разными маяками могут использоваться разные частоты для обеспечения множественных измерений, производимых одновременно в стволе другой скважины. Когда несколько маяков используются в одном и том же местоположении, они могут обеспечить множественный выбор угла подхода.
Как описано выше, маяк предпочтительно размещают в подножье скважины или вблизи него. Однако, в зависимости от эксплуатационной необходимости, он по необходимости может также быть размещен в других местоположениях вдоль скважины. Например, если необходимо пересечь скважину в середине горизонтального сечения, маяк может быть размещен в точке требуемого пересечения. В таких случаях маяк может быть удален непосредственно перед пересечением, после того как с высокой достоверностью установлена траектория пересечения. В других приведенных в качестве примера вариантах реализации изобретения несколько маяков могут быть размещены в различных местоположениях вдоль ствола скважины, и решение по направлению может быть принято обобщенно на основании показаний всех маяков. Например, маяк в подножье скважины может быть использован в процессе подхода, но после завершения подхода маяк может быть перемещен в новое местоположение в первой скважине для обеспечения идеального размещения SAGD.
Маяк может быть размещен в скважине различными способами. Например, маяк может быть размещен вдоль каротажной проволоки (например, соленоида на проволоке), как проиллюстрировано на Фиг. 1 А. В качестве альтернативы, например, маяк может быть размещен вдоль кабельного каротажного инструмента, эксплуатационного инструмента вдоль обсаженного ствола скважины, как часть инструмента КВБ или может даже быть постоянно размещен в обсаженном стволе скважины. С целью постоянного размещения маяки могут быть изготовлены из материала для корпуса с высоким коэффициентом трения, который не даст им скользить вдоль ствола скважины. В качестве альтернативы, маяк может быть просто расположен вдоль горизонтального участка ствола скважины, таким образом, используя силу тяжести для удержания своего положения. В еще других вариантах реализации изобретения корпус может представлять собой магнитный корпус, который пристает к обсадной колонне или какой-либо иной металлической скважинной конструкции. В случае если обсадная колонна выполнена из магнитного материала, может быть использован сигнал постоянного тока для превращения маяка в электромагнит, который может одновременно возбуждаться переменным током, управляющим маяком.
В еще других приведенных в качестве примера вариантах реализации данного изобретения магнитные маяки могут также быть размещены на поверхности или внизу морского дна в шельфовом применении. В таких применениях, в зависимости от требуемой траектории скважины, силовые линии магнитного поля могут быть использованы непосредственно для направления скважины.
Фиг. 3 представляет собой упрощенную иллюстрацию множества дипольных конфигураций маяка/приемника дальномерных систем 300А-Е, в соответствии с альтернативными вариантами реализации данного изобретения. Диполи маяков 17 проиллюстрированы на левой стороне, а диполи приемника 16 проиллюстрированы на правой стороне. Хотя описанное применение основано на измерениях КВБ для диполя приемника(ов) 16, также возможно использование тросового инструмента для произведения таких измерений, как описано ранее. Такой тросовый инструмент может быть, например, размещен внутри компоновки низа бурильной колонны 14 или может полностью ее заменить. В некоторых вариантах реализации изобретения диполи приемника 16 располагаются как можно ближе к буровому долоту 19, однако из-за наличия бурового двигателя и трудностей с прокладкой каналов питания и связи через отсек двигателя, может быть более целесообразно разместить приемники 16 выше долота 19 и бурового двигателя. Следует отметить, что в альтернативных вариантах реализации изобретения диполи 16, 17 могут выступать в качестве маяка или приемника.
По-прежнему ссылаясь на Фиг. 3, в некоторых вариантах реализации изобретения маяк(и) 17 может (могут) содержать один магнитный диполь, ориентированный в требуемом направлении механически или посредством конструкции. В таких случаях диполь может быть ориентирован в осевом (z) направлении (как один из маяков 17 системы 300D). Тем не менее, более выгодно иметь трехосную конфигурацию маяка с тремя сочетаемыми магнитными диполями, которые идеально размещены перпендикулярно друг ко другу. Такие маяки проиллюстрированы в дальномерных системах 300A, B, C (два трехосных маяка), D (отдельный трехосный маяк и один одноосный маяк) и E (два трехосных маяка). Трехосная конфигурация обеспечивает трехосную ориентацию маяка в любом требуемом направлении без какой-либо механической манипуляции.
В еще других вариантах реализации изобретения маяки 17 могут содержать нескольких диполей маяка в различных местоположениях вдоль ствола скважины (или скважинного инструмента/оборудования), таких как проиллюстрированные в дальномерных системах 300С, D и Е. Такие варианты реализации изобретения обеспечивают сбор градиентных измерений, что составляет разность магнитных полей между двумя близко расположенными приемниками 16. Ориентация градиента может быть произвольной, однако ориентированный в направлении z градиент (например, проиллюстрированный в системе 300С, D и E) идеально подходит для горизонтального подхода. Однако в других приведенных в качестве примера вариантах реализации изобретения также могут быть получены другие направления градиента (например, градиенты x или y).
В вариантах реализации изобретения, с применением, например, нескольких маяков, маяки могут упоминаться как первый и третий магнитный диполь. В этом случае первый магнитный диполь может быть использован для получения значения первого измерения магнитного поля, а третий магнитный диполь используется на получения значения второго измерения магнитного поля. Направления первого и/или второго измерения магнитного поля могут затем быть использованы для определений дальнометрии/геонавигации, как описано в настоящем документе.
Магнитные диполи могут быть реализованы, например, посредством наклонно расположенных или не наклонно расположенных рамочных антенн, соленоидов, феррозондовых магнитометров, атомных магнитометров или любого другого типа устройства, которое может измерять магнитные поля. Чувствительность и соотношение сигнал-шум дипольного приемника определяет диапазон и точность измерения. Как понимают в данной области техники, градиентное измерение требует намного большего соотношения сигнал-шум в магнитном поле, по сравнению с абсолютным измерением для достижения такой же процентной точности.
По-прежнему ссылаясь на Фиг. 3, приемник(и) 16, который(е) проиллюстрирован(ы) в правой части фигуры, представляют собой также магнитные диполи, и они являются трехосной конфигурацией. Однако один из приемников 16 системы 300В представляет собой одноосный дипольный приемник. Тем не менее, в вариантах реализации изобретения с применением трехосных конструкций, трехосные приемники могут быть реализованы посредством одного или более одноосных либо двухосных приемников, тем самым выгодно используя множественные измерения при различных углах поворота, которые естественным образом имеются в наличии во время фазы поворота бурового процесса. В таких вариантах реализации изобретения трехосное измерение синтетически формируется из множественных одноосных или двухосных измерений при различных углах поворота путем объединения всех измерений с соответствующими величинами. Такая операция измерительных систем координат основывается на линейной алгебре и операции с векторами. Аналогично тому, что было описано выше для маяков, приемники в некоторых вариантах реализации изобретения могут также выполнять градиентное измерение для вычисления расстояния или ориентации. Градиентная ориентация может представлять собой осевое (z) направление для горизонтального подхода, тем не менее, может быть также получено альтернативное направление. Каждый магнитный диполь, который состоит из одной из трех осей, может быть сочетаемым или располагаться в шахматном порядке вдоль оси ствола скважины по отношению друг к другу.
Конструкция компоновки низа бурильной колонны 14 может принимать различные формы. В одном приведенном в качестве примера варианте реализации изобретения приемный диполь (диполи) может быть размещен в желобах на компоновке низа бурильной колонны с предохранительным кожухом. В других вариантах реализации изобретения приемный диполь (диполи) располагается вдоль компоновки низа бурильной колонны внутри немагнитной утяжеленной трубы, которая не препятствует функционированию диполей. В этом случае следует отметить, что описанное в настоящем документе для передающих или приемных диполей не является ограничивающим возможные альтернативные конфигурации с большим и меньшим количеством диполей.
Фиг. 4 представляет собой блок-схему системной схемы 400 для диполя маяка, в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения. Центр управления системы 402 активирует генератор сигналов 404, в результате чего получают сигнал, который направляется в разные маяки по мере необходимости. Демультиплексор 406 может быть применен для определения, какой маяк 17 следует эксплуатировать, однако несколько маяков также можно в то же время эксплуатировать, как указывалось выше. В некоторых вариантах реализации изобретения систему можно эксплуатировать как узкую полосу частот, по существу, на фиксированной частоте, или ее можно эксплуатировать с импульсом временной области с широкополосным возбуждением. В случае широкополосного возбуждения максимальная частота эксплуатации может быть ограничена для сведения к минимуму последствий удельного сопротивления пласта, которые могут усложнить функционирование полей и расшифровку данных. Однако широкая полоса низких частот в диапазоне 0,01-100 Гц, например, также может быть использована с частичной зависимостью от требуемого диапазона эксплуатации. Кроме того, возбуждение может быть динамически оптимизировано на основании оцененного диапазона между передающими и приемными диполями. Опять же, как указывалось ранее, магнитные диполи маяка могут быть передающими диполями, а буровые скважинные магнитные диполи могут быть приемными диполями. В качестве альтернативы, магнитные диполи маяка могут быть приемными, а буровые скважинные магнитные диполи могут быть передающими.
Хотя этот вариант реализации схемы 400 формирует часть маяка 17, в других приведенных в качестве примера вариантах реализации изобретения один или более компонентов схемы 400 могут быть расположены в месте, удаленном от маяка 17 (например, на поверхности). В таких вариантах реализации изобретения маяк 17 будет содержать необходимую схему связи для проводной или беспроводной связи.
Фиг. 5 представляет собой блок-схему системной схемы 500, применяемой для приемного диполя (диполей), в соответствии с определенными приведенными в качестве примера вариантами реализации данного изобретения. Центр управления системы 502 получает сигналы измерения магнитного поля от множества приемников 16 в одних и тех же разных местоположениях вдоль ствола скважины. В этом варианте реализации изобретения полученные данные сохраняются в буфере данных 504, а затем передаются на поверхность посредством модуля обработки/связи 506 для дальнейшей обработки. В некоторых других вариантах реализации изобретения некоторые или все операции по обработке могут быть выполнены внутри скважины, что может обеспечить экономию в работе телеметрической полосы пропускания. Блок сбора данных 508 может проводить измерения в зависимости от времени, и измерения могут быть преобразованы в частотной области с помощью преобразования Фурье. Измеренные данные магнитных полей могут быть проанализированы в комплексной векторной области на отдельных частотах в разрезе вещественных и мнимых частей или в разрезе соответствующей информации о фазе или амплитуде. В связи с низкочастотным характером возбуждения полученный сигнал измерения будет иметь, по существу, постоянную фазу, которая не зависит от характеристик пласта. В результате этого ожидается, что информация об амплитуде будет включать большинство требуемых данных, и в некоторых вариантах реализации изобретения фазу можно не учитывать при связи и последующей обработке.
Хотя этот вариант реализации схемы 500 формирует часть бурового оборудования 14, в других приведенных в качестве примера вариантах реализации изобретения один или более компонентов схемы 500 могут быть расположены в месте, удаленном от оборудования 14 (например, на поверхности). В таких вариантах реализации изобретения буровое оборудование 14 будет содержать необходимую схему связи для проводной или беспроводной связи, чтобы таким образом передавать данные обратно вверх по стволу скважины и/или другим компонентам оборудования (например, чтобы направлять буровое долото, являющееся частью оборудования 14).
В альтернативных вариантах реализации изобретения схема 400,500, необходимая для выполнения одного или более аспектов методов, описанных в данном документе, может быть расположена в месте, удаленном от маяка 17/бурового оборудования 14, например, на поверхности или в стволе другой скважины. Хотя это не проиллюстрировано, схема 400,500 может содержать по меньшей мере один процессор, а также энергонезависимое и машиночитаемое запоминающее устройство, при этом все они соединены между собой системной шиной. Программные команды, выполняемые процессором для реализации приведенных в качестве примера относительных методов позиционирования, описанных в данном документе, могут храниться в локальном запоминающем устройстве или на каком-либо другом машиночитаемом носителе. Следует также понимать, что программные команды позиционирования могут быть также загружены в запоминающее устройство с CD-ROM или другого пригодного запоминающего носителя с помощью способов проводной или беспроводной связи.
Кроме того, различные аспекты данного изобретения могут быть реализованы посредством различных конфигураций компьютерных систем, включая портативные устройства, многопроцессорные системы, микропроцессорные или программируемые бытовые электронные устройства, мини-компьютеры, мэйнфреймы и тому подобное. Любое количество компьютерных систем и компьютерных сетей является пригодным для применения в связи с настоящим изобретением. Данное изобретение может быть реализовано в распределенных вычислительных средах, где задачи выполняются посредством удаленных устройств обработки, которые связаны через коммуникационную сеть. В распределенной вычислительной среде программные модули могут быть расположены как на локальных, так и удаленных компьютерных носителях данных, включая запоминающие устройства. Поэтому настоящее изобретение может быть реализовано в связи с различным аппаратным обеспечением, программным обеспечением или их комбинацией в компьютерной системе или другой системе обработки.
В некоторых других приведенных в качестве примера вариантах реализации изобретения калибровка магнитометров и рамочных антенн, применяемых в качестве передающих или приемных диполей, может быть выполнена с помощью одного из стандартных и имеющихся в наличии способов калибровки на поверхности или по месту установки. Более того, в некоторых вариантах реализации изобретения калибровка может выполняться как функция давления и температуры, что уменьшает погрешности в калибровочном применении в различных условиях окружающей среды.
Как описано выше, варианты реализации данного изобретения анализируют направление магнитных полей для определения направления к маяку. В результате этого буровое оборудование может быть направлено вдоль требуемой траектории скважины. В некоторых других вариантах реализации изобретения также может быть определено расстояние до маяка. Далее будут описаны вычисления расстояния, выполняемые центром управления системы 502. Со ссылкой на Фиг. 1А-5, при условии, что ствол второй скважины 12 находится в зоне подхода, магнитное поле можно аппроксимировать по формуле:
 Уравнение (2a)
Уравнение (2a)
 Уравнение (2b),
Уравнение (2b),
где u представляет собой расстояние между маяком и приемными диполями, а Hu представляет собой проекцию  в направлении
в направлении  . Hu= • , где • представляет собой скалярное внутреннее произведение. Затем центр управления системы 502 может вычислить расстояние между маяком и приемником на основании уравнений (2а, b) по формуле:
. Hu= • , где • представляет собой скалярное внутреннее произведение. Затем центр управления системы 502 может вычислить расстояние между маяком и приемником на основании уравнений (2а, b) по формуле:
u=3√(1/(2πHu)). Уравнение (3),
где 3√ относится к кубическому корню.
Хотя уравнение (3) может использоваться для вычисления расстояния в некоторых вариантах реализации изобретения, это представляет собой сложные задачи, потому что точная мощность маяка и коэффициент усиления приемника могут не быть известны или точно откалиброваны. Хотя для маяка и приемника калибровка может быть выполнена по отдельности, объединенный коэффициент усиления маяка и приемника после изготовления может отклоняться от заданного показателя. В результате этого вычисление расстояния, произведенное центром управления системы 502, может искажаться таким коэффициентом. Для того чтобы избежать подобной проблемы, некоторые варианты реализации данного изобретения выполняют градиентное измерение (производную поля вдоль направления u) по формуле:
 Уравнение (4).
Уравнение (4).
Когда берется соотношение между абсолютным измерением (т. е. амплитудой измерения) и градиентным измерением, расстояние между маяком и приемником может быть вычислено центром управления системы 502 в нормализованном режиме, в котором отсутствуют какие-либо погрешности коэффициента усиления, по формуле:
 Уравнение (5a),
Уравнение (5a),
u=−3 (Hu/((∂Hu)/(∂u))) Уравнение (5b).
Из уравнений (5a,b) можно увидеть, что расстояние может быть вычислено как соотношение абсолютного измерения и градиентного измерения, умноженного на коэффициент 3. Эта формула действительна, только если вторая скважина находится в зоне подхода маяка, т. е. вторая скважина, по существу, центрирована с ориентацией маяка. Как описано выше, маяк может быть динамически ориентирован в направлении второй скважины для достижения такого состояния.
Фиг. 6 представляет собой блок-схему обобщенного способа дальнометрии 600, применяемого для определения относительного положения стволов первой и второй скважин, в соответствии с определенными приведенными в качестве примера способами по данному изобретению. В блоке 602 первый магнитный диполь расположен вдоль ствола первой скважины. В блоке 604 трехосный магнитный диполь расположен вдоль ствола второй скважины. Диполи в стволах первой и второй скважин могут представлять собой маяки или приемники, как было описано ранее. Таким образом, если диполь в стволе первой скважины представляет собой маяк, диполь в стволе второй скважины представляет собой приемник - и наоборот. Тем не менее, в любом варианте реализации изобретения в блоке 606 магнитное поле распространяется между стволами первой и второй скважин (излучаемое от одного из диполей), при этом оно измеряется противоположным диполем в стволе другой скважины. В блоке 608 центр управления системы вычисляет направление первого измерения магнитного поля, которое может быть вычислено на основании измерений магнитного поля в трех линейно независимых направлениях с помощью простой линейной алгебры. В случае, когда три направления перпендикулярны друг другу, направление представляет собой просто вектор, который образован из каждого из измерений. В случае, когда три направления не перпендикулярны друг другу, может быть применено координатное преобразование. Соответственно, в блоке 610, навигационные данные обрабатываются центром управления системы, чтобы тем самым направлять компоновку низа бурильной колонны как необходимо на основании данных о направлении. В одном варианте реализации изобретения компоновка низа бурильной колонны центрируется в направлении первого измерения магнитного поля. Однако в других вариантах реализации изобретения компоновка низа бурильной колонны может направляться для обхода маяка, излучающего диполь.
Способ 600 может быть реализован различными способами. Например, как проиллюстрировано на Фиг. 1А-3, компоновка низа бурильной колонны 14 может быть расположена вдоль ствола второй скважины и содержать трехосный магнитный диполь (диполи). В таком варианте реализации изобретения магнитное поле распространяется от одного или более первых магнитных диполей (например, маяков), расположенных в стволе первой скважины 10, а затем значение первого измерения магнитного поля передается во вторую скважину с помощью трехосного диполя (диполей). Однако, в качестве альтернативы, в этом же варианте реализации изобретения магнитное поле может распространяться с помощью трехосного магнитного диполя (диполей) (т. е. маяка) в стволе второй скважины, и значение первого измерения магнитного поля получают с помощью магнитного диполя в стволе первой скважины.
В еще одном варианте реализации способа 600 компоновка низа бурильной колонны 14 может быть расположена вдоль ствола первой скважины 10 и содержит первый магнитный диполь (диполи). В этом случае магнитное поле может затем распространяться из ствола второй скважины 12 с помощью трехосного магнитного диполя (диполей) (который могут быть расположен вдоль ствола скважины 12 посредством любого из способов, описанных в данном документе). Затем значения первых измерений магнитного поля получают посредством первого магнитного диполя (диполей) оборудования 14 в стволе первой скважины 10. Однако, в качестве альтернативы, в этом же варианте реализации изобретения магнитное поле может распространяться с помощью первого магнитного диполя, такого как маяк, и тогда значение первого измерения магнитного поля получают посредством трехосного магнитного диполя (диполей) в стволе второй скважины 12.
В еще других способах 600 в блоке 602 размещение первого магнитного диполя в стволе первой скважины выполняется путем размещения по меньшей мере одного магнитного диполя в стволе первой скважины. Возможно также синтетическим путем генерировать магнитный диполь с помощью комбинаций нескольких вторичных диполей, как проиллюстрировано в системах 300С-Е на Фиг. 3. В некоторых вариантах реализации изобретения вторичные магнитные диполи сочетаются, т. е. их электрические центры находятся в одном и том же местоположении, при этом электрический центр представляет собой эффективный центр эквивалентного магнитного диполя. Как проиллюстрировано в системах 300С-Е, три вторичных магнитных диполя могут быть использованы для синтеза первого магнитного диполя. Это обеспечивает электрическое изменение угла маяка без какого-либо физического изменения.
Фиг. 7, 8 и 9 представляют собой блок-схемы более подробно изложенных способов определения относительного положения стволов первой и второй скважины, в соответствии с определенными приведенными в качестве примера способами по данному изобретению. В способе 700 первый магнитный диполь (диполи) и трехосный магнитный диполь (диполи) расположены в стволах скважин, как ранее описано в способе 600. В блоке 702 данные геодезической разведки сначала используются для размещения ствола второй скважины 12 в пределах зоны подхода. На основании данных геодезической разведки определяют идеальную траекторию бурения и направление бурения скважины, и бурение выполняют на основании этой информации. В блоке 704 активируется маяк 17 для распространения магнитного поля, и центр управления системы (регулирующий приемный диполь (диполи)), посредством приемников 16, получает значения абсолютных измерений магнитного поля, как описано ранее. После этого в блоке 706 центр управления системы определяет направление и расстояние до маяка и направляет буровое оборудование для выравнивания (или обхода) по направлению магнитного поля. Выполнение данного способа может быть прекращено, если на основании данных геодезической разведки считается, что скважины находятся очень близко друг к другу (если пересечение не желательно).
В способе 800 первый магнитный диполь (диполи) и трехосный магнитный диполь (диполи) расположены в стволах скважин, как описано ранее. В блоке 802 данные геодезической разведки сначала используются для размещения ствола второй скважины в пределах зоны подхода. Затем в блоке 804 маяк 17 активируют для распространения магнитного поля, и центр управления системы, посредством приемника(ов) 16, получает значения абсолютных измерений магнитного поля. После этого, используя измерения в блоке 806, центр управления системы вычисляет расстояние и направление к маяку 17 с применением значения абсолютного измерения магнитного поля с помощью уравнения (3), описанного в данном документе. Дальше в блоке 808 центр управления системы определяет оптимальную траекторию скважины на основании измеренного относительного положения маяка. В блоке 810 буровая компоновка направляется вдоль оптимальной траектории скважины.
В способе 900 первый магнитный диполь (диполи) и трехосный магнитный диполь (диполи) расположены в стволах скважин, как описано ранее. В блоке 902 данные геодезической разведки сначала используются для размещения ствола второй скважины в пределах зоны подхода. Затем в блоке 904 маяк 17 активируют для распространения магнитного поля, и центр управления системы, посредством приемника(ов) 16, получает значения абсолютных измерений магнитного поля. В блоке 906 центр управления системы, посредством двух или более приемников 16 и их измерений, получает значение градиента магнитного поля. После этого, используя абсолютные и градиентные измерения в блоке 908, центр управления системы вычисляет расстояние и/или направление к маяку 17 с применением уравнений (3) и (5), соответственно, описанных в данном документе. Дальше в блоке 910 центр управления системы определяет оптимальную траекторию скважины на основании измеренного относительного положения маяка. В блоке 912 буровое оборудование направляется вдоль оптимальной траектории скважины.
В качестве альтернативы, используя любой из способов 700, 800 или 900, центр управления системы может корректировать направление маяка до или после получения значения первого измерения магнитного поля. Для этого центр управления системы сначала вычисляет ожидаемую позицию битов и ориентацию бурения ствола второй скважины 12 на основании данных геодезической разведки. Затем центр управления системы определяет оптимальную траекторию скважины по критериям бурения, таким как механические характеристики слоев. Соответственно, направление маяка может быть скорректировано на основании оптимальной скважинной траектории ствола второй скважины. Это может обеспечить выполнение буровых работ по оптимальной траектории скважины, а не случайной и может обеспечить экономию времени, стоимости бурения и повысить его безопасность.
Как описано выше, в альтернативном применении относительная система позиционирования и способы согласно данному изобретению также применимы при работах по обходу скважины. В таком применении целевая скважина не обязательно имеется в наличии. Тем не менее, в одном приведенном в качестве примера способе относительная система позиционирования размещается вдоль бурового оборудования. В процессе бурения встроенная схема обработки (или удаленная от) системы активно ищет другие магнитные поля, излучаемые маяками, посредством различных компонентов и функций магнитного поля, описанных в данном документе. Когда магнитные поля измеряются и анализируются, система позиционирования соответственно изменяет траекторию бурения.
Следовательно, варианты реализации настоящего изобретения, описанные в данном документе, используют естественную форму магнитных полей для направления и установки стволов скважин. Варианты реализации данного изобретения не требуют интерпретации, вычисления расстояния или направления в фазе подходе. В результате этого система не требует синхронизации между маяком и приемниками и может функционировать даже в случае более низких отношений сигнал/шум, что содействует большему диапазону работ. Данная система также обеспечивает установку скважин одну над другой из противоположных направлений, что могло бы потенциально уменьшить общее время буровых работ в применении SAGD (если обе скважины являются нагнетательными или обе являются добывающими). Кроме того, раскрытые системы могут быть применены для лобового пересечения скважин, что снова-таки может, быть использовано для различных целей, таких как сокращение времени бурения или возможность иметь в наличии две точки доступа к скважине для оптимизации добычи.
Варианты реализации изобретения, описанные дальше в данном документе, относятся к любому одному или более следующих пунктов:
1. Способ внутрискважинной дальнометрии, включающий размещение первого магнитного диполя в стволе первой скважины; размещение трехосного магнитного диполя в стволе второй скважины; получение значения первого измерения магнитного поля, распространяющегося между стволами первой и второй скважин; вычисление направления указанного первого измерения магнитного поля; и наведение компоновки низа бурильной колонны, исходя из направления первого измерения магнитного поля.
2. Способ по п. 1, отличающийся тем, что компоновка низа бурильной колонны расположена вдоль ствола второй скважины, причем компоновка низа бурильной колонны содержит трехосный магнитный диполь; а получение значения первого измерения включает: распространение магнитного поля от ствола первой скважины посредством первого магнитного диполя; и получение значения первого измерения магнитного поля посредством трехосного магнитного диполя в стволе второй скважины.
3. Способ по любому из пп. 1-2, отличающийся тем, что компоновка низа бурильной колонны расположена вдоль ствола второй скважины, причем компоновка низа бурильной колонны содержит трехосный магнитный диполь; а получение значения первого измерения включает: распространение магнитного поля от ствола второй скважины посредством трехосного магнитного диполя; и получение значения первого измерения магнитного поля посредством первого магнитного диполя в стволе первой скважины.
4. Способ по любому из пп. 1-3, отличающийся тем, что компоновка низа бурильной колонны расположена вдоль ствола первой скважины, причем компоновка низа бурильной колонны содержит первый магнитный диполь; а получение значения первого измерения включает: распространение магнитного поля от ствола второй скважины посредством трехосного магнитного диполя; и получение значения первого измерения магнитного поля посредством первого магнитного диполя в стволе первой скважины.
5. Способ по любому из пп. 1-4, отличающийся тем, что компоновка низа бурильной колонны расположена вдоль ствола первой скважины, причем компоновка низа бурильной колонны содержит первый магнитный диполь; а получение значения первого измерения включает: распространение магнитного поля от ствола первой скважины посредством первого магнитного диполя; и получение значения первого измерения магнитного поля посредством трехосного магнитного диполя в стволе второй скважины.
6. Способ по любому из пп. 1-5, отличающийся тем, что наведение компоновки низа бурильной колонны, исходя из направления первого измерения магнитного поля, включает выравнивание компоновки низа бурильной колонны по направлению первого измерения магнитного поля.
7. Способ по любому из пп. 1-6, отличающийся тем, что размещение первого магнитного диполя в стволе первой скважины включает размещение по меньшей мере двух вторичных магнитных диполей в стволе первой скважины; и синтезирование первого магнитного диполя посредством по меньшей мере двух вторичных диполей.
8. Способ по любому из пп. 1-7, отличающийся тем, что по меньшей мере два вторичных магнитных диполя сочетаются.
9. Способ по любому из пп. 1-8, отличающийся тем, что по меньшей мере два вторичных магнитных диполя содержат три вторичных магнитных диполя.
10. Способ по любому из пп. 1-9, дополнительно включающий корректировку направления первого магнитного диполя после получения по меньшей мере одного значения первого измерения магнитного поля.
11. Способ по любому из пп. 1-10, отличающийся тем, что корректировка направления первого магнитного диполя включает анализ данных геодезической разведки ствола второй скважины; вычисление ожидаемой скважинной траектории ствола второй скважины на основании данных геодезической разведки; и корректировку направления первого магнитного диполя на основании ожидаемой скважинной траектории ствола второй скважины.
12. Способ по любому из пп. 1-11, дополнительно включающий размещение третьего магнитного диполя вдоль ствола первой скважины; использование третьего магнитного диполя для получения результата второго измерения магнитного поля, распространяющегося между стволами первой и второй скважин; и вычисление направлении второго измерения магнитного поля, причем направления первого и второго измерения магнитного поля используются для наведения компоновки низа бурильной колонны.
13. Способ по любому из пп. 1-12, дополнительно включающий вычисление расстояния между стволами первой и второй скважин на основании амплитуды первого измерения магнитного поля.
14. Способ по любому из пп. 1-13, отличающийся тем, что расстояние вычисляется по формуле: u=3√(1/(2πHu)).
15. Способ по любому из пп. 1-14, дополнительно включающий получение значения градиента магнитного поля на основании первого и второго измерений магнитного поля;
и использование значения градиента магнитного поля для вычисления расстояния между стволами первой и второй скважин.
16. Способ по любому из пп. 1-15, отличающийся тем, что получение значения градиента магнитного поля дополнительно включает вычисление амплитуды первого измерения магнитного поля; и вычисление расстояния между стволами первой и второй скважин дополнительно включает вычисление соотношения амплитуды первого измерения магнитного поля со значением градиента магнитного поля.
17. Способ по любому из пп. 1-16, отличающийся тем, что соотношение выражается следующей формулой: u=−3 (Hu/((∂Hu)/(∂u))).
18. Способ по любому из пп. 1-18, отличающийся тем, что первая скважина представляет собой добывающую скважину; а вторая скважина представляет собой нагнетательную скважину, при этом данный способ применяется в операции парогравитационного дренажа.
19. Способ по любому из пп. 1-18, отличающийся тем, что первая скважина представляет собой самоизливающуюся скважину; а вторая скважина представляет собой пересекающую скважину, при этом данный способ применяется для прекращения разлива углеводородов, выходящих из самоизливающейся скважины.
20. Способ по любому из пп. 1-19, отличающийся тем, что данный способ применяют для пересечения стволов первой и второй скважин с целью образования одной скважины.
21. Способ по любому из пп. 1-20, отличающийся тем, что ствол первой скважины пересекается с концом ствола второй скважины.
22. Способ по любому из пп. 1-21, отличающийся тем, что ствол первой скважины пересекается, по существу, перпендикулярно со стволом второй скважины.
23. Способ по любому из пп. 1-22, отличающийся тем, что данный способ применяется в операции по обходу скважины.
24. Способ по любому из пп. 1-23, отличающийся тем, что компоновка низа бурильной колонны представляет собой буровое оборудование, каротажное оборудование или тросовое оборудование.
25. Внутрискважинная дальномерная система, содержащая схему обработки для реализации любого из способов по пп. 1-24.
Кроме того, методики, описанные в данном документе, могут быть реализованы в рамках компьютерного программного продукта, содержащего команды, которые, когда выполняются по меньшей мере одним процессором, заставляет процессор выполнять любой из способов, описанных в данном документе.
Хотя в данном документе проиллюстрированы и описаны различные варианты реализации изобретения и методики, данное раскрытие не ограничивается только такими вариантами реализации изобретения и методиками и подразумевает включение всех модификаций и вариаций. Следовательно, необходимо понимать, что данное раскрытие не предназначено для ограничения конкретными раскрытыми формами. Вместо этого намерение состоит в том, чтобы охватить все модификации, эквиваленты и альтернативы, подпадающие под сущность и объем данного изобретения, определенные прилагаемой формулой изобретения.
Изобретение относится к бурению скважин и может быть использовано для определения расстояния между скважинами. Техническим результатом является повышение точности и надежности позиционирования скважины относительно другой скважины. В частности, предложен способ внутрискважинной дальнометрии, включающий: размещение первого магнитного диполя в стволе первой скважины; размещение трехосного магнитного диполя в стволе второй скважины; получение значения первого измерения магнитного поля, распространяющегося между стволами первой и второй скважин, причем магнитное поле имеет естественную форму; вычисление направления указанного первого измерения магнитного поля на основании естественной формы магнитного поля; и наведение компоновки низа бурильной колонны, исходя из траектории подхода. Причем естественная форма магнитного поля определяет траекторию подхода, по которой наводится компоновка низа бурильной колонны, и вычисление расстояния между стволами первой и второй скважин на основании амплитуды первого измерения магнитного поля. 2 н. и 22 з.п. ф-лы, 12 ил.
1. Способ внутрискважинной дальнометрии, включающий: размещение первого магнитного диполя в стволе первой скважины;
размещение трехосного магнитного диполя в стволе второй скважины;
получение значения первого измерения магнитного поля, распространяющегося между стволами первой и второй скважин, причем магнитное поле имеет естественную форму;
вычисление направления указанного первого измерения магнитного поля на основании естественной формы магнитного поля, причем естественная форма магнитного поля определяет траекторию подхода, по которой наводится компоновка низа бурильной колонны, и вычисление расстояния между стволами первой и второй скважин на основании амплитуды первого измерения магнитного поля; и
наведение компоновки низа бурильной колонны, исходя из траектории подхода.
2. Способ по п. 1, отличающийся тем, что:
компоновка низа бурильной колонны располагается вдоль ствола второй скважины, причем компоновка низа бурильной колонны содержит трехосный магнитный диполь; и
получение значения первого измерения включает:
распространение магнитного поля от ствола первой скважины посредством первого магнитного
диполя; и
получение значения первого измерения магнитного поля посредством трехосного магнитного диполя в стволе второй скважины.
3. Способ по п. 1, отличающийся тем, что:
компоновка низа бурильной колонны располагается вдоль ствола второй скважины, причем компоновка низа бурильной колонны содержит трехосный магнитный диполь; и
получение значения первого измерения включает:
распространение магнитного поля от ствола второй скважины посредством трехосного магнитного диполя; и
получение значения первого измерения магнитного поля посредством первого магнитного диполя в стволе первой скважины.
4. Способ по п. 1, отличающийся тем, что:
компоновка низа бурильной колонны располагается вдоль ствола первой скважины, причем компоновка низа бурильной колонны содержит первый магнитный диполь; и
получение значения первого измерения включает:
распространение магнитного поля от ствола второй скважины посредством трехосного магнитного диполя; и
получение значения первого измерения магнитного поля посредством первого магнитного диполя в стволе первой скважины.
5. Способ по п. 1, отличающийся тем, что:
компоновка низа бурильной колонны располагается вдоль ствола первой скважины, причем компоновка низа бурильной колонны содержит первый магнитный диполь; и
получение значения первого измерения включает:
распространение магнитного поля от ствола первой скважины посредством первого магнитного диполя; и
получение значения первого измерения магнитного поля посредством трехосного магнитного диполя в стволе второй скважины.
6. Способ по п. 1, отличающийся тем, что наведение компоновки низа бурильной колонны включает выравнивание компоновки низа бурильной колонны по траектории подхода.
7. Способ по п. 1, отличающийся тем, что размещение первого магнитного диполя в стволе первой скважины включает:
размещение по меньшей мере двух вторичных магнитных диполей в стволе первой скважины; и
синтезирование первого магнитного диполя посредством по меньшей мере двух вторичных диполей.
8. Способ по п. 7, отличающийся тем, что по меньшей мере два вторичных магнитных диполя сочетаются.
9. Способ по п. 7, отличающийся тем, что используют три вторичных магнитных диполя.
10. Способ по п. 1, дополнительно включающий корректировку направления первого магнитного диполя после получения по меньшей мере одного значения первого измерения магнитного поля.
11. Способ по п. 10, отличающийся тем, что корректировка направления первого магнитного диполя включает:
анализ данных геодезической разведки ствола второй скважины;
вычисление ожидаемой скважинной траектории ствола второй скважины на основании данных геодезической разведки; и
корректировку направления первого магнитного диполя на основании ожидаемой скважинной траектории ствола второй скважины.
12. Способ по п. 1, дополнительно включающий:
размещение третьего магнитного диполя вдоль ствола первой скважины;
использование третьего магнитного диполя для получения результата второго измерения магнитного поля, распространяющегося между стволами первой и второй скважин; и
вычисление направления второго измерения магнитного поля,
при этом направления первого и второго измерений магнитного поля используются для наведения компоновки низа бурильной колонны.
13. Способ по п. 1, отличающийся тем, что расстояние между стволами первой и второй скважин вычисляется по формуле:
где u представляет собой расстояние между маяком и приемными диполями, а Hu представляет собой проекцию  в направлении
в направлении  .
.
14. Способ по п. 11, дополнительно включающий:
получение значения градиента магнитного поля с использованием первого и второго измерений магнитного поля; и
использование значения градиента магнитного поля для вычисления расстояния между стволами первой и второй скважин.
15. Способ по п. 14, отличающийся тем, что:
получение значения градиента магнитного поля дополнительно включает вычисление амплитуды первого измерения магнитного поля; и
вычисление расстояния между стволами первой и второй скважин дополнительно включает вычисление соотношения между амплитудой первого измерения магнитного поля и значением градиента магнитного поля.
16. Способ по п. 15, отличающийся тем, что указанное соотношение выражается формулой:
u=−3 (Hu/((∂Hu)/(∂u)))
где u представляет собой расстояние между маяком и приемными диполями, а Hu представляет собой проекцию в направлении , (Hu/((∂Hu)/(∂u))) соотношение амплитуды первого измерения магнитного поля со значением градиента магнитного поля.
17. Способ по п. 1, отличающийся тем, что:
первая скважина представляет собой добывающую скважину; и
вторая скважина представляет собой нагнетательную скважину, при этом указанный способ применяется в операции парогравитационного дренажа.
18. Способ по п. 1, отличающийся тем, что:
первая скважина представляет собой самоизливающуюся скважину; и
вторая скважина представляет собой пересекающую скважину, при этом указанный способ применяется для прекращения разлива углеводородов, выходящих из самоизливающейся скважины.
19. Способ по п. 1, отличающийся тем, что указанный способ применяется для пересечения стволов первой и второй скважин с целью образования одной скважины.
20. Способ по п. 19, отличающийся тем, что ствол первой скважины пересекается с концом ствола второй скважины.
21. Способ по п. 19, отличающийся тем, что ствол первой скважины пересекается, по существу, перпендикулярно со стволом второй скважины.
22. Способ по п. 1, отличающийся тем, что указанный способ применяется в операции по обходу скважины.
23. Способ по п. 1, отличающийся тем, что компоновка низа бурильной колонны представляет собой буровое оборудование, каротажное оборудование или тросовое оборудование.
24. Внутрискважинная дальномерная система, содержащая схему обработки для реализации любого из способов по пп. 1-23.
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 5258755 A, 02.11.1993 | |||
| Способ замачивания зерна на солод | 1955 |
|
SU104854A1 |
| СИСТЕМА КОНТРОЛЯ ПРОЦЕССА ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СТВОЛОВ ПРИ КУСТОВОМ БУРЕНИИ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2009 |
|
RU2405106C1 |
| СПОСОБ СООРУЖЕНИЯ И СПОСОБ ЭКСПЛУАТАЦИИ ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ | 1999 |
|
RU2159317C1 |
| US 4372398 A1, 08.02.1983. | |||

