Перекрестная ссылка
По данной заявке испрашивается приоритет предварительной заявки на изобретение США №61/905726, которая была подана 18 ноября 2013 г. и содержание которой в полном объеме включено в настоящее описание путем ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к технологическим машинам, содержащим защитные системы, предназначенные для быстрой остановки движения рабочего инструмента.
Уровень техники
Известно множество технологических машин, предназначенных для придания заготовке, т.е. обрабатываемому изделию, требуемой формы. Одной из таких технологических машин является торцовочная пила, также называемая горцовочно-усовочной пилой. Торцовочные пилы представляют опасность в эксплуатации, поскольку оснащаются очень острым пильным диском, движущимся с очень высокой скоростью. Соответственно, неосторожное обращение с такими машинами чревато практически мгновенным получением тяжелых травм или увечий, например, отсечением пальцев и глубокими порезами. Для противодействия опасностям, сопряженным с работой открытого пильного диска, движущегося с высокой скоростью, для торцовочных пил был разработан ряд различных предохранительных систем, или систем безопасности. Одной такой предохранительной системой безопасности является ограждение пильного диска, или защитный кожух. Ограждение пильного диска установлено подвижно и окружает пильный диск, тем самым создавая физический барьер, который нужно сдвинуть, чтобы обнажить вращающийся пильный диск. Хотя ограждения пильного диска и эффективны в отношении предотвращения некоторых видов травм, пальцы пользователя все равно находятся вблизи движущегося пильного диска, особенно если при использовании торцовочной пилы для изменения формы заготовки пользователь пытается фиксировать обрабатываемую заготовку рукой.
Были разработаны предохранительные системы для торцовочных пил, предназначенные для остановки пильного диска при приближении руки пользователя к пильному диску или касании рукой пользователя пильного диска. Также были разработаны различные останавливающие устройства, в том числе тормозные устройства, физически вводимые в зубчатый венец пильного диска. Как правило, при обнаружении вблизи пильного диска части человеческого тела формируется и посылается в систему реагирования, такую как тормозной механизм, сигнал на быструю остановку вращения пильного диска. Одна такая система раскрыта в публикации US 2011/0048197. В других решениях системы реагирования включают в себя механический или электрический тормоз. В некоторых системах реагирования также используются пиротехнические средства, обеспечивающие уборку под стол движущегося режущего полотна, частным случаем которого является пильный диск, или иного рабочего инструмента, изначально выступавшего через щель или отверстие в столе.
Во всех этих системах способность перевода системы в безопасное состояние основывается на своевременном выявлении наличия небезопасной ситуации. Поэтому чувствительность соответствующей сенсорной (воспринимающей) системы должна быть достаточной для минимизации риска травмирования. Если же система слишком чувствительна, рабочий инструмент будет переводиться в безопасное состояние, даже если опасность для пользователя в действительности отсутствует. Такие нежелательные срабатывания системы предупреждения травмирования могут создавать большие неудобства, а в некоторых случаях могут приводить к издержкам.
Таким образом, существует потребность в простой и надежной схеме, уменьшающей потенциал нежелательных срабатываний системы предупреждения травмирования при обеспечении повышенной чувствительности к небезопасным ситуациям.
Раскрытие изобретения
Объектом изобретения является технологическая машина, содержащая режущее устройство, сенсорную систему, расположенную вблизи режущего устройства, систему реагирования, функционально связанную с режущим устройством, запоминающее устройство, в котором хранятся программные команды и алгоритм пространственного распознавания, и процессор, функционально связанный с системой реагирования, сенсорной системой и запоминающим устройством. Процессор способен выполнять программные команды для обнаружения части человеческого тела (профиля человека) в зоне чувствительности, соотнесенной с режущим устройством, определения положения обнаруженной части человеческого тела в зоне чувствительности с использованием алгоритма пространственного распознавания, установления наличия небезопасной ситуации на основании определенного положения части человеческого тела, и активирования системы реагирования.
В одном или нескольких вариантах осуществления изобретения сенсорная система содержит чип емкостного зондирования и один или несколько приемников, а процессор также способен выполнять программные команды для получения соответствующего сигнала от приемника или каждого из приемников, причем соответствующие сигналы используются для определения положения части человеческого тела.
В одном или нескольких вариантах осуществления изобретения процессор способен выполнять программные команды для определения положения обнаруженной части человеческого тела в зоне чувствительности относительно движущегося компонента режущего устройства.
В одном или нескольких вариантах осуществления изобретения движущийся компонент включает в себя режущее полотно (режущее полотно может иметь, в том числе, круглую форму, представляя собой режущий диск), а чип емкостного зондирования функционально связан с режущим полотном с возможностью излучения режущим полотном сигнала от чипа емкостного зондирования.
В одном или нескольких вариантах осуществления изобретения процессор способен выполнять программные команды для установления наличия небезопасной ситуации на основании определяемых скорости и направления движения части человеческого тела.
В одном или нескольких вариантах осуществления изобретения процессор способен выполнять программные команды для задания опасной зоны по отношению к режущему полотну и установления наличия небезопасной ситуации на основании определенного положения части человеческого тела и опасной зоны.
В одном или нескольких вариантах осуществления изобретения процессор способен выполнять программные команды для задания опасной зоны на основании определяемого положения режущего полотна.
В одном или нескольких вариантах осуществления изобретения процессор способен выполнять программные команды для задания опасной зоны на основании определяемого положения ограждения, расположенного вокруг части режущего полотна.
В одном или нескольких вариантах осуществления изобретения сенсорная система содержит несколько приемников, включающих в себя первый приемник, расположенный вблизи переднего участка режущего полотна, второй приемник, расположенный за первым приемником и вблизи первой стороны режущего полотна, и третий приемник, расположенный за первым приемником и вблизи второй стороны режущего полотна, противоположной первой стороне.
В одном или нескольких вариантах осуществления изобретения приемники включают в себя четвертый приемник, расположенный вблизи заднего участка режущего полотна, пятый приемник, расположенный перед четвертым приемником и вблизи первой стороны режущего полотна, и шестой приемник, расположенный перед четвертым приемником и вблизи второй стороны режущего полотна.
В одном или нескольких вариантах осуществления изобретения процессор выполнен с возможностью задания опасной зоны на основании определяемого положения ограждения, расположенного вокруг части режущего полотна, во время изменения положения ограждения режущего полотна.
Объектом изобретения является также способ управления работой технологической машины, характеризующийся тем, что посредством сенсорной системы обнаруживают часть человеческого тела в зоне чувствительности, соотнесенной с режущим устройством технологической машины, при обнаружении части человеческого тела определяют ее положение в зоне чувствительности путем выполнения с помощью процессора алгоритма пространственного распознавания, хранящегося в запоминающем устройстве, на основании определенного положения части человеческого тела посредством процессора устанавливают наличие небезопасной ситуации и посредством процессора активируют систему реагирования для уменьшения угрозы, связанной с небезопасной ситуацией.
В одном или нескольких вариантах осуществления изобретения часть человеческого тела обнаруживают посредством чипа емкостного зондирования и одного или нескольких приемников, а положение части человеческого тела определяют с использованием одного или нескольких сигналов, получаемых процессором от одного или нескольких приемников.
В одном или нескольких вариантах осуществления изобретения положение части человеческого тела определяют с использованием одного или нескольких сигналов относительно движущегося компонента режущего устройства.
В одном или нескольких вариантах осуществления изобретения способ также включает излучение сигнала режущим полотном режущего устройства посредством чипа емкостного зондирования.
В одном или нескольких вариантах осуществления изобретения наличие небезопасной ситуации устанавливают посредством процессора на основании определяемых скорости и направления движения части человеческого тела.
В одном или нескольких вариантах осуществления изобретения посредством процессора также определяют положение режущего полотна и с использованием определенного положения режущего полотна задают опасную зону путем выполнения с помощью процессора программных команд, хранящихся в запоминающем устройстве, причем наличие небезопасной ситуации устанавливают посредством процессора на основании заданной опасной зоны.
В одном или нескольких вариантах осуществления изобретения опасную зону задают на основании определяемого положения ограждения, расположенного вокруг части режущего полотна.
В одном или нескольких вариантах осуществления изобретения используют несколько приемников, причем определение положения части человеческого тела включает анализ одного или нескольких первых сигналов, полученных от первого приемника, расположенного вблизи переднего участка режущего полотна, анализ одного или нескольких вторых сигналов, полученных от второго приемника, расположенного за первым приемником и вблизи первой стороны режущего полотна, и анализ одного или нескольких третьих сигналов, полученных от третьего приемника, расположенного за первым приемником и вблизи второй стороны режущего полотна, противоположной первой стороне.
В одном или нескольких вариантах осуществления изобретения определение положения части человеческого тела включает анализ одного или нескольких четвертых сигналов, полученных от четвертого приемника, расположенного вблизи заднего участка режущего полотна, анализ одного или нескольких пятых сигналов, полученных от пятого приемника, расположенного перед четвертым приемником и вблизи первой стороны режущего полотна, и анализ одного или нескольких шестых сигналов, полученных от шестого приемника, расположенного перед четвертым приемником и вблизи второй стороны режущего полотна.
Краткое описание чертежей
На фиг. 1 приведено перспективное изображение торцовочной пилы в ракурсе спереди-справа.
На фиг. 2 приведена структурная схема трансмиссии, обеспечивающей передачу мощности между двигателем и режущим полотном и включающей в себя управляющий системой реагирования предохранительный контур в конфигурации с использованием взаимной емкости.
На фиг. 3 приведен упрощенный вид трансмиссии с правой стороны.
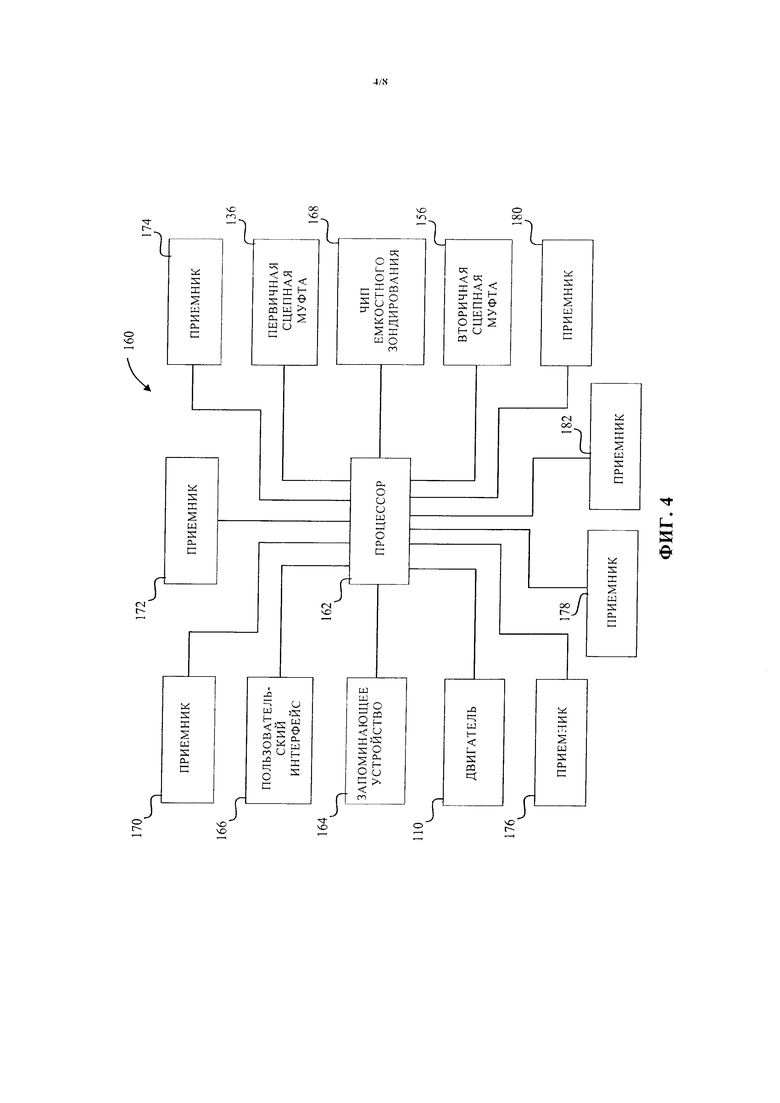
На фиг. 4 приведена схема предохранительного контура, показанного на фиг. 2.
На фиг. 5 приведена блок-схема процесса, выполняемого показанным на фиг. 4 процессором для предупреждения травмирования с использованием емкостного зондирования и пространственного распознавания;
На фиг. 6-8 показано поведение выходного сигнала некоторых из показанных на фиг. 4 датчиков при перемещении пользователем руки вокруг торцовочной пилы, показанной на фиг. 1.
На фиг. 9 приведена блок-схема процесса калибровки, выполняемого показанным на фиг. 4 процессором для изменения порогов на основании движения компонентов торцовочной пилы, показанной на фиг. 1.
На фиг. 10 приведена структурная схема трансмиссии, обеспечивающей передачу мощности между двигателем и режущим полотном и включающей в себя управляющий системой реагирования предохранительный контур, причем трансмиссия аналогична показанной на фиг. 2, но предохранительный контур имеет конфигурацию с использованием собственной емкости.
Осуществление изобретения
Для разъяснения принципов, положенных в основу изобретения, ниже приведено описание вариантов осуществления изобретения, поясняемое чертежами. При этом подразумевается, что данное описание не ограничивает возможностей осуществления изобретения. Также подразумевается, что в рассматриваемые варианты осуществления изобретения и формы реализации указанных принципов могут вноситься изменения, очевидные для специалиста в области техники, к которой относится изобретение.
На фиг. 1 показана технологическая машина, выполненная в виде торцовочной пилы 100. Осуществление изобретения возможно также в приложении к другим типам технологических машин, таким как настольная пила, торцовочная пила с горизонтальным перемещением пильного блока (также называемая панельной пилой, пилой с тяговой функцией или с протяжкой), рычажная или маятниковая пила (стандартная торцовочная пила с возможностью выполнения вертикальных пропилов), торцовочная пила с возможностью выполнения комбинированных углов, т.е. пиления с наклоном в двух плоскостях, циркулярная (дисковая) пила, пила по дереву, или т.п. Торцовочная пила 100 содержит станину 102 и поворотный стол 104, установленный на станине 102 с возможностью поворота. Торцовочная пила 100 также содержит пильный (рабочий) блок 106, установленный на опорном устройстве 108 и также называемый рабочей/пильной головой. Пильный блок 106 (который в данном описании также может называться режущим устройством) содержит двигатель 110, выполненный с возможностью привода во вращение пильного диска 112. Несущее пильный блок опорное устройство 108 закреплено на поворотном столе 104 и поддерживает пильный блок 106 с возможностью перемещения последнего над поворотным столом 104 и выполнения резов в заготовке (WP), опирающейся на поворотный стол 104. На станине 102 закреплена упорная планка 114, посредством которой можно сориентировать заготовку WP на станине.
Опорное устройство 108 пильного блока содержит наклоняемый рычаг 116, торцовочный рычаг 118, первый поворотный узел 120 и второй поворотный узел 122. Наклоняемый рычаг 116 (также называемый наклоняемой опорной стойкой) образует опорную конструкцию, обеспечивающую возможность выполнения торцовочной пилой 100 наклонных пропилов. Наклоняемый рычаг 116 шарнирно закреплен на поворотном столе 104 посредством первого поворотного узла 120. Первый поворотный узел 120 содержит шарнирное устройство, позволяющее поворачивать наклоняемый рычаг 116 опорного устройства 108 относительно поворотного стола 104 при настройке машины. В частности, это шарнирное устройство выполнено таким образом, чтобы перед резанием можно было повернуть наклоняемый рычаг 116 влево или вправо, переведя его из вертикального положения (показанного на фиг. 1-2) в положение наклона под углом 45° (на чертежах не показано) или большим углом. После такого поворота наклоняемого рычага режущее полотно режущего устройства 106, выполненное в виде пильного диска 112, можно подводить к столу 104 наклонно и резать опирающуюся на стол 104 заготовку со скосом, как это известно из уровня техники.
Торцовочный рычаг 118 опорного устройства 108 служит опорой для режущего устройства 106. Торцовочный рычаг 118 сочленен с промежуточным звеном 124 посредством шарнира 126. Шарнир 126 обеспечивает возможность поворота режущего устройства 106 относительно поворотного стола 104 и станины 102 во время резания. Такое шарнирное крепление режущего устройства позволяет при резании подводить пильный диск 112 режущего устройства 106 к горизонтальному поворотному столу 104 и отводить пильный диск от поворотного стола. В других вариантах осуществления изобретения торцовочный рычаг 118 может быть установлен на промежуточном звене 124, а промежуточное звено 124 может быть установлено с возможностью перемещения по направляющим скольжения (торцовочные пилы с тяговой функцией или с горизонтальным перемещением). В еще одной конфигурации торцовочный рычаг 1 18 может быть установлен с возможностью поворота непосредственно на наклоняемом рычаге 116 посредством второго поворотного узла 122 (отрезная дисковая пила, т.е. торцовочная пила без возможности горизонтального перемещения режущего устройства).
Режущее устройство 106 имеет рукоятку 126, присоединенную к торцовочному рычагу 118 для перемещения пользователем режущего устройства 106 относительно поворотного стола 104. Рукоятка 126 имеет такую форму и размеры, чтобы при резании заготовки пользователь мог держать ее рукой. Это позволяет пользователю легко поворачивать режущее устройство 106. На рукоятке 126 может быть предусмотрен выключатель (на чертежах не показан), посредством которого пользователь во время резания может легко включать и выключать электрический двигатель 110. Верхняя часть пильного диска 112 закрывает ограждение 128. На пильном блоке 106 установлено с возможностью поворота нижнее ограждение 130 пильного диска (защитный кожух), которое для наглядности чертежа показано пунктиром. Нижнее ограждение 130 пильного диска установлено таким образом, чтобы при повороте пильного блока 106 к поворотному столу 104 поворачиваться относительно пильного блока 106 на фиг. 1 по часовой стрелке, таким образом обнажая пильный диск 112.
Функциональная связь между двигателем 110 и пильным диском 112 также описывается со ссылкой на фиг. 2 и 3. Двигатель 110 имеет выходной вал 131, приводящий во вращение шестерню 132 зубчатой передачи. Шестерня 132 функционально связана с зубчатым колесом 134, приводящим узел 135 сцепления и торможения. Узел 135 сцепления и торможения включает в себя первичную сцепную муфту 136, соединяющую зубчатое колесо 134 с первичным тормозным устройством 138. В одном варианте осуществления изобретения в качестве первичного тормозного устройства 138 используется тормозное устройство, описанное в публикации US 201 1/0048197, содержание которой в полном объеме включено в данное описание путем ссылки.
Первичное тормозное устройство 138 приводит шкив 140, функционально связанный ремнем 144 со шкивом 142. В некоторых вариантах осуществления изобретения ременная передача может быть заменена зубчатой передачей. Шкив 142 функционально связан с зубчатым колесом 146, передающим вращение на зубчатое колесо 148, функционально связанное с приводным валом 150, на котором установлен пильный диск 112. Двигатель 110, а также ведущие от нею передачи с зубчатыми колесами и шкивами, смонтированы так, чтобы пильный диск 112 вращался передней кромкой вниз.
Шестерня 132 также связана с зубчатым колесом 152 обратного хода. Зубчатое колесо 152 обратного хода передает вращение на зубчатое колесо 154, приводящее вторичную сцепную муфту 156, которая, в свою очередь, связана с вторичным тормозом 158. Вторичный тормоз 158 функционально связан с промежуточным звеном 124.
На фиг. 2 также показан предохранительный контур 160, используемый для выявления небезопасных ситуаций и управления различными компонентами торцовочной пилы 100 при возникновении таких ситуаций. Предохранительный контур 160, также показанный на фиг. 4, включает в себя процессор 162, функционально связанный с двигателем 110, первичной сцепной муфтой 136 и вторичной сцепной муфтой 156. Процессор 162 также функционально связан с запоминающим устройством 164, пользовательским интерфейсом 166, чипом 168 емкостного зондирования и по меньшей мере одним приемником, в частности несколькими приемниками 170, 172, 174, 176, 178, 180 и 182.
Процессор 162 реализован в соответствии с предъявляемыми требованиями, например, с одним или несколькими универсальными или специализированными программируемыми процессорами, выполняющими запрограммированные команды, хранящиеся в запоминающем устройстве 164, как подробнее поясняется ниже. Процессор 162, запоминающее устройство 164 и интерфейсные схемы могут быть размещены на печатной плате или могут входить в состав электрической цепи специализированной, или заказной, интегральной схемы. Каждая из схем может быть реализована с отдельным процессором, или на одном процессоре может быть реализовано несколько схем. В качестве альтернативы, схемы могут быть реализованы с дискретными компонентами или в составе сверхбольших интегральных схем. Кроме того, описываемые здесь схемы могут быть реализованы с использованием комбинации из процессоров, специализированных интегральных схем, дискретных компонентов или сверхбольших интегральных схем.
Хотя на чертеже показан только один чип 168 емкостного зондирования, может быть предусмотрено несколько таких чипов. Чип 168 емкостного зондирования представляет собой емкостный датчик прикосновения или приближения, приводимый в действие одним или несколькими бесконтактными сенсорными чипами (использующими собственную емкость или взаимную емкость), например чипами, поставляемыми компаниями Silicon Labs (C8051F7xx, C8051F8xx, C8051F9xx и аналогичные не включенные в перечень чипы), Microchip (GestIC, все универсальные микроконтроллеры mTouch и аналогичные не включенные в перечень чипы), Atmel (QTouch/QTouchADC, QMatrix и аналогичные не включенные в перечень чипы) или иным аналогичным чипом. В варианте осуществления изобретения, показанном на фиг. 2, чип 168 емкостного зондирования имеет конфигурацию с использованием взаимной емкости. Соответственно, чип 168 емкостного зондирования выполнен таким образом, чтобы подавать сигнал на пильный диск 112, электрически изолированный от остальных компонентов машины, что позволяет пильному диску 112 действовать в качестве излучателя. В других вариантах осуществления изобретения чип 168 емкостного зондирования выполнен таким образом, чтобы излучателем служил другой компонент торцовочной пилы 100, такой как верхнее ограждение, упорная планка или верх поворотного стола.
В некоторых вариантах осуществления изобретения функциональность бесконтактного обнаружения интегрирована в процессоры, например, построенные на основе архитектуры ARM, или реализована в любой иной желательной форме. В некоторых вариантах осуществления изобретения для управления одним или несколькими чипами бесконтактного емкостного зондирования используется более чем один микроконтроллер. В некоторых вариантах осуществления изобретения один или несколько микроконтроллеров управляют чипом(-ами) бесконтактного емкостного зондирования и другими сенсорными системами (например, системами, использующими излучение в ближней инфракрасной (БИК) области, сверхширокополосные (СШП) сигналы, инфракрасное (ИК) излучение и т.д.). В некоторых вариантах осуществления изобретения один или несколько микроконтроллеров управляют комбинацией процессоров, построенных на основе архитектуры ARM, и другими сенсорными системами (например, системами, использующими БИК-излучение, СШП-сигналы, ИК-излучение и т.д.).
Чип бесконтактного емкостного зондирования функционально связан с пильным диском 1 12 (или другой движущейся частью других систем), а приемники 170-182 расположены вокруг пильного диска 112. На фиг. 2, например, приемник 170 показан как расположенный сзади и справа от пильного диска 112, приемник 172 - посредине и справа от пильного диска 112, приемник 174 - спереди и справа от пильного диска 112, приемник 176 - сзади и слева от пильного диска 112, приемник 178 - посредине и слева от пильного диска 112, приемник 180 - спереди и слева от пильного диска 112, а приемник 182 - перед пильным диском 112. В одном варианте осуществления изобретения приемники установлены на ограждении 128 пильного диска, снаружи или внутри этого ограждения 128. В других вариантах осуществления изобретения может использоваться большее или меньшее число приемников. Хотя использоваться может и один приемник, применение нескольких приемников обеспечивает избыточность, а для некоторых алгоритмов - и повышенную точность. Кроме того, нахождение мест фактической установки приемников может варьироваться по необходимости. Например, в некоторых вариантах осуществления изобретения приемники устанавливаются на одном или нескольких из следующих элементов: верхнее ограждение пильного диска, стол, упорные планки и/или вставка стола с пазом под пильный диск.
Кроме того, в некоторых вариантах осуществления изобретения предохранительный контур 160 встроен в настольную циркулярную пилу (круглопильная машина). В таких вариантах осуществления изобретения пары "излучатель-приемник" могут быть сформированы с использованием пильного диска, выполненного в виде камертона элемента ограждения пильного диска, стола, вставки стола с пазом под пильный диск, расклинивающего ножа, станины и/или ограждения. Таким образом, выбор компонента, используемого в качестве излучателя, может варьироваться, а приемники будут размещаться на одном или нескольких из других компонентов.
В некоторых вариантах осуществления изобретения предохранительный контур 160 встроен в ручную циркулярную пилу. В таких вариантах осуществления изобретения пары "излучатель-приемник" могут быть сформированы с использованием пильного диска, неподвижного ограждения, подвижного ограждения и/или опорной плиты. Таким образом, выбор компонента, используемого в качестве излучателя, может варьироваться, а приемники будут размещаться на одном или нескольких из других компонентов.
Работа предохранительного контура 160 описывается также со ссылкой на фиг. 5. При первоначальном запитывании предохранительного контура 160 (шаг 190), процессор 162 выполняет программные команды, хранящиеся в запоминающем устройстве 164, для выполнения диагностики/калибровки системы (шаг 192). В некоторых вариантах осуществления изобретения предохранительный контур также выполнен с возможностью тестирования первичной и вторичной тормозных систем в отношении готовности/работоспособности в процессе анализа видов и последствий отказов (АВПО, англ. сокр. FMEA от "Failure Mode and Effects Analysis") на шаге 192. Функциональный контроль, или контроль работоспособности, датчика(-ов) включает в себя выполнение АВПО путем опроса одного или нескольких датчиков, что позволяет убедиться в их надлежащем функционировании. В некоторых вариантах осуществления изобретения предохранительный контур в случае обнаружения неисправности первичной и/или вторичной тормозной системы блокирует включение пилы. В других вариантах осуществления изобретения предохранительный контур в случае обнаружения неисправности первичной тормозной системы блокирует включение вторичного тормозного устройства и пилы.
Если на шаге 194 установлено, что диагностика/калибровка не завершилась успешно, генерируется сообщение об ошибке (шаг 196), и система проводит проверку на предмет того, находится ли предохранительный контур 160 в режиме обхода (шаг 198). Если система находится в режиме обхода, это условие принимается (шаг 200), и система переходит в состояние ожидания/готовности (шаг 202).
Если на шаге 198 установлено, что система не находится в режиме обхода, генерируется сигнал сброса (шаг 204), и процесс переходит обратно к шагу 192.
Возвращаясь к шагу 194, если процесс диагностики/калибровки завершен успешно, процесс продолжается переходом к шагу 206. Если на шаге 206 предохранительный контур 160 находится в режиме обхода, генерируется сообщение об ошибке, поскольку причина для работы с отключенным предохранительным контуром 160 отсутствует. Если на шаге 206 предохранительный контур 160 не находится в режиме обхода, процесс продолжается переходом в состояние ожидания/готовности (шаг 208).
После того как система оказалась в состоянии ожидания/готовности (шаг 208), процессор 162 на шаге 210 проверяет состояние пускового выключателя (на чертежах не показан), обычно расположенного в рукоятке 126. Если пусковой выключатель не нажат, т.е. не находится в положении "ВКЛ.", процесс переходит обратно к состоянию ожидания/готовности (шаг 208).
Если на шаге 210 установлено, что пусковой выключатель нажат, процессор 162 проверяет, находится ли предохранительный контур 160 в режиме обхода (шаг 212). Если предохранительный контур 160 находится в режиме обхода, то входные сигналы от датчиков не принимаются во внимание (шаг 214), и процессор 162 проверяет, чтобы двигатель 110 был подключен к источнику питания, а пусковой выключатель был нажат (шаг 216). Если двигатель 110 подключен к источнику питания и пусковой выключатель нажат, процесс продолжается переходом к шагу 214. Если на шаге 216 выясняется, что либо двигатель 110 не подключен к источнику питания, либо пусковой выключатель не нажат, процесс продолжается переходом к шагу 218, и выполняется АВПО. Если на шаге 218 АВПО проходит, система возвращается к шагу 208 входа в состояние ожидания/готовности. Если на шаге 218 АВПО не проходит, то процесс продолжается переходом к шагу 208 входа в состояние ожидания/готовности с выдачей пользователю тревожного сообщения о результатах АВПО.
Возвращаясь к шагу 212, если система не находится в режиме обхода, то процесс продолжается переходом к шагу 220, и выполняется АВПО/калибровка. Если процесс АВПО/калибровки не проходит, генерируется сообщение об ошибке и процесс завершается. Если процесс АВПО/калибровки проходит успешно, то на шаге 222 выполняется нормальное резание. На шаге 224 процессор 162 проверяет, чтобы двигатель 110 был подключен к источнику питания, а пусковой выключатель был нажат.Если эти условия выполнены, процесс переходит к шагу 226, и процессор 162 проводит проверку на наличие небезопасной ситуации.
Ситуация квалифицируется как "небезопасная", если сигналы, полученные от приемников 170-182, поодиночке или все вместе превышают порог, хранящийся в запоминающем устройстве 164. Сущность этого порога поясняется ссылкой на фиг. 6-8. На фиг. 6 отражен график 230, содержащий кривые изменения выходных сигналов от приемников 174. 180 и 182. Выходной сигнал приемника 174 обозначен кривой 232, выходной сигнал приемника 180 обозначен кривой 234 и выходной сигнал приемника 182 обозначен кривой 236. Превышение уровнем сигнала уровня шума указывает на то, что в зоне чувствительности, расположенной вокруг режущего устройства, обнаружена часть человеческого тела, например, мягкая ткань, палец, плечо, локоть, рука или любая иная часть человеческого тела. Зона чувствительности представляет собой совокупность областей чувствительности, соотнесенных с каждым из сенсорных приборов, которыми в этом варианте осуществления изобретения являются приемники. Анализ этих сигналов позволяет определить конкретное положение части человеческого тела в зоне чувствительности.
Например, график 230 был получен при перемещении руки человека вблизи переднего левого участка пильного диска 112. Поскольку рука была ближе всего к приемнику 182, приемник 182 сгенерировал наибольший сигнал (кривая 236). Поскольку рука была ближе к приемнику 180, чем к приемнику 174, приемник 180 сгенерировал следующий по величине сигнал (кривая 234).
График 240 на фиг. 7 показывает те же выходные сигналы приемников, что и фиг. 6, но график 240 был получен при перемещении руки человека вблизи переднего правого участка пильного диска 112. Поскольку рука была ближе всего к приемнику 174 в момент времени Т2, приемник 174 сгенерировал наибольший сигнал (кривая 232). Поскольку рука была ближе к приемнику 182, чем к приемнику 180, приемник 182 сгенерировал следующий по величине сигнал (кривая 236). График 240 также показывает, что в момент времени T1 рука в действительности была ближе к приемнику 182 (кривая 236), чем к приемнику 174 (кривая 232). Таким образом, анализ выходных сигналов позволяет отслеживать положение руки относительно приемников.
График 242 на фиг. 8 показывает те же выходные сигналы приемников, что и фиг. 6, но график 242 был получен при перемещении руки человека вблизи переднего левого участка пильного диска 112. Поскольку после момента времени Т2 рука была ближе всего к приемнику 180, приемник 180 сгенерировал наибольший сигнал (кривая 234). Поскольку рука была ближе к приемнику 182, чем к приемнику 180, приемник 182 сгенерировал следующий по величине сигнал (кривая 236). График 240 также показывает, что между моментами времени T1 и Т2 рука двигалась к пильному диску 112, но в основном к передней левой стороне пильного диска 112, поскольку все приемники выдавали повышенный сигнал, однако скорость изменения сигналов от приемников 180 и 182 (кривые 234 и 236, соответственно) была выше, чем скорость изменения сигнала от приемника 174 (кривая 232).
Таким образом, сохранив в запоминающем устройстве 164 требуемый алгоритм, можно анализировать выходные сигналы приемников 170-182 для выяснения относительного положения, скорости и направления движения руки. Следовательно, выбирая требуемое положение и конфигурацию входящих предохранительный контур 160 компонентов, можно настроить предохранительный контур для задания опасной зоны с требуемой формой и чувствительностью. Например, в показанном на фиг. 1 варианте осуществления изобретения для руки, приблизившейся к участку пильного диска 112, закрытому ограждением 128, вероятность травмирования меньше, чем для руки, приблизившейся к участку пильного диска 112, который обнажен или закрыт нижним ограждением 130 пильного диска. Таким образом, предохранительный контур 160 обеспечивает пространственное распознавание, что, с использованием соответствующего алгоритма распознавания, хранящегося в запоминающем устройстве 164, позволяет лучше идентифицировать небезопасную ситуацию на основании определенного положения руки относительно пильного диска 112 или другого движущегося компонента режущего устройства, а также скорости движения руки. Таким образом, "порог" представляет собой границу трехмерной опасной зоны, форма которой в некоторых вариантах осуществления изобретения отражает относительную опасность конкретного положения части человеческого тела относительно движущегося компонента режущего устройства.
Возвращаясь к блок-схеме на фиг. 5, если небезопасная ситуация не обнаружена (шаг 226), процессор 162 проверяет, чтобы предохранительная система 160 не находилась в режиме обхода (шаг 248). Если система не находится в режиме обхода, на шаге 222 продолжается нормальное резание. Если на шаге 248 установлено, что система находится в режиме обхода, двигатель 110 отключается от источника питания, и генерируется сообщение об ошибке.
Если на шаге 226 установлено наличие небезопасной ситуации, активируется система реагирования (шаг 250). Системой реагирования является система, выполненная с возможностью перевода режущего устройства в безопасное состояние, например, путем остановки режущего устройства или отвода режущего устройства от пользователя. При активировании системы реагирования процессор 162 выключает сцепную муфту 136 и приводит в действие первичное тормозное устройство 138 для быстрой остановки пильного диска, как подробнее обсуждается в публикации US 2011/0048197.
Предохранительный контур 160 также связан с вторичной сцепной муфтой 156 и вторичным тормозным устройством 158. При обнаружении небезопасной ситуации соответствующий сигнал также посылается на электромагнит в узле 135 сцепления и торможения, при этом выключается сцепная муфта 156 и приводится в действие вторичное тормозное устройство 158. Вторичное тормозное устройство 158 может приводиться в действие одновременно с первичным тормозным устройством 138 или через заданное время. В некоторых вариантах осуществления изобретения временной порядок срабатывания компонентов предохранительного контура зависит от конкретного применения (например, от того, идет ли речь о торцовочной пиле или циркулярной пиле). В некоторых применениях, относящихся к торцовочным пилам, например, в показанном на фиг. 1 варианте осуществления изобретения, временной порядок срабатывания также зависит от углового положения пильного блока 106.
Поскольку вторичное тормозное устройство 158 работает параллельно с первичной тормозной системой 138, пила 100 получает механизм динамической балансировки. Вторичное тормозное устройство 158 выбирается аналогичным первичной тормозной системе 138 для уменьшения разрушающей энергии, создаваемой при включении первичной тормозной системы 138. Эти два тормозных компонента по своим размерам выполнены соответственно тому, как это обсуждается в заявке на изобретение США №61/781931, поданной 14 марта 2013 г., содержание которой в полном объеме включено в данное описание путем ссылки.
После произошедшей на шаге 250 активизации системы реагирования процесс продолжается на шаге 204.
Возвращаясь к шагу 224, если либо двигатель 110 отключен от источника питания, либо пусковой выключатель не нажат, процесс продолжается переходом к шагу 252, и процессор 162 проводит проверку па наличие небезопасной ситуации. При наличии небезопасной ситуации процесс продолжается переходом к шагу 250. Если на шаге 252 небезопасная ситуация не выявлена, процесс продолжается переходом к шагу 254, и выполняется калибровка порога.
Калибровка порога подробнее представлена на фиг. 9. На шаге 256 калибровки порога, процессор 162 определяет, было ли какое-либо изменение положения любой части торцовочной пилы 100. Если изменений не было, для задания небезопасной ситуации сохраняются те же пороги (шаг 258), и процесс продолжается переходом к шагу 260, показанному на фиг. 5. Если в отношении какой-либо части торцовочной пилы 100 произошло изменение, то процессор 162 выполняет алгоритм, хранящийся в запоминающем устройстве 164, для установки новых порогов (шаг 262).
Например, если сдвинулось нижнее ограждение, то участки пильного диска, прежде закрытые ограждением, теперь обнажились. Соответственно, рука, которая прежде рассматривалась бы как находящаяся в безопасной зоне, т.е. за пределами опасной зоны, теперь будет находиться в опасной зоне. Аналогично, к изменению опасной зоны приводит изменение относительного положения пильного диска 112 при повороте пильного блока 106 или перемещении пильного блока по направляющим скольжения. Это особенно верно в вариантах осуществления изобретения, где положение одного или нескольких приемников или других компонентов предохранительного контура 160 относительно пильного диска 112 не является фиксированным.
После того как на шаге 262 были сгенерированы новые пороги, происходит обновление порогов, хранящихся в запоминающем устройстве 164, и процесс продолжается переходом к шагу 260, показанному на фиг. 5. Следует заметить, что, хотя калибровка порога рассмотрена в отношении шага 254, показанного на фиг. 5, в некоторых вариантах осуществления изобретения такая же калибровка выполняется на шаге 222, т.е. во время нормального резания.
Возвращаясь к фиг. 5, после завершения калибровки порога процессор 162 выполняет на шаге 260 проверку на предмет того, произошла ли полная остановка пильного диска 112. Если пильный диск полностью не остановился, процесс на шаге 252 продолжается для выявления возможной небезопасной ситуации.
Если на шаге 260 установлено, что произошла полная остановка пильного диска, процесс продолжается на шаге 262 и выполняется АВПО. Если АВПО не проходит, процесс продолжается переходом к шагу 196. Если АВПО на шаге 262 проходит, процесс продолжается переходом к шагу 202.
В конкретных случаях применения описанные выше процессы могут изменяться различным образом. Так, в некоторых вариантах осуществления изобретения на основании заданной зоны близости к режущему полотну устанавливается, например, на шаге 192, исходный порог, задаваемый без движений режущего полотна. В некоторых вариантах осуществления изобретения датчики калибруются при включении питания и повторно калибруются для компенсации движения режущего полотна (т.е. эффектов массы) через каждый малый промежуток времени. Компонентом массы является любая часть технологической машины (стол/станина/упорная планка/опорная плита и т.д.), оказывающая влияние на значение емкости датчика при изменении положения режущего полотна (наклон относительно вертикальной плоскости, наклон относительно горизонтальной плоскости, подъем/опускание пильного блока и т.д.).
В некоторых вариантах осуществления изобретения опасная область представляет собой зону, образуемую периметром, проходящим вокруг передней, левой, правой и/или задней части режущего полотна. В некоторых вариантах осуществления изобретения этот периметр не является однородным. Обнаружение ткани или части человеческого тела, т.е. определение небезопасной ситуации, выполняется по изменению уровня емкости при прикосновении или приближении. Иначе говоря, присутствие ткани человеческого тела обнаруживается, когда рука прикасается к режущему полотну или оказывается в опасной области (зона заданной близости к режущему полотну).
Уровень емкости, при котором срабатывает система реагирования, называют пороговым уровнем и определяют опытным путем и посредством алгоритма распознавания. В контексте настоящего изобретения понятие "алгоритм распознавания" означает программу с заданным компенсированным по массе порогом и операционной логикой. Операционная логика включает в себя, без ограничения нижеперечисленным, автоматический сброс, автоматическую калибровку порога, функциональный контроль сенсорной системы и системы реагирования, включение и отключение системы, контроль отклонения от порога и инициирования срабатывания системы реагирования, пользовательского интерфейса и памяти событий.
В некоторых вариантах осуществления изобретения автоматический сброс, автоматическая калибровка порога, функциональный контроль сенсорной системы и системы реагирования, включение и отключение системы, контроль отклонения от порога и инициирования срабатывания системы реагирования и пользовательского интерфейса начинаются, как только штепсельная вилка сетевого шнура вставлена в розетку электропитания. В некоторых вариантах осуществления изобретения включение системы, т.е. приведение ее в состояние готовности, происходит при активировании пускового выключателя подачи питания на двигатель или при нажатии рукой определенной кнопки. Отключение системы в некоторых вариантах осуществления изобретения происходит, если штепсельная вилка сетевого шнура остается в розетке, а пусковой выключатель подачи питания на двигатель остается незадействованным в течение заданного времени. В некоторых вариантах осуществления изобретения отключение системы также происходит, если в результате функционального контроля выявлена ее неисправность.
В рассматриваемых вариантах осуществления изобретения предусмотрено использование микроконтроллера, ведущего обработку данных при выполнении алгоритма для непрерывного контроля любых отклонений уровня емкости от порога и определения наличия небезопасной ситуации для выдачи в систему реагирования останавливающего сигнала. Некоторые варианты осуществления изобретения предусматривают, что в случае прекращения подачи энергии предохранительная система во время вращения режущего полотна или режущего инструмента должна оставаться активной, по меньшей мере, до полной остановки режущего полотна.
Хотя выше подробно рассматривалось определенное расположение датчиков, в некоторых вариантах осуществления изобретения датчики имеют любое угловое положение по отношению к режущему полотну, причем параллельное режущему полотну расположение обычно определяется как угловое положение 0 градусов. Кроме того, размер датчиков и их положение относительно режущего полотна зависят от требуемой дальности обнаружения приближения части человеческого тела к режущему полотну. Обычно датчики имеют размеры, соответствующие площади, составляющей по меньшей мере 5 квадратных миллиметров, при отсутствии минимальной толщины. Кроме того, используемые датчики могут иметь любую геометрическую форму, включая форму квадратов, прямоугольников, рулонов и витков спирали. Датчики в частных вариантах осуществления изобретения могут содержать электрический проводник, имеющий прямолинейную форму, форму различных узоров или петель.
В некоторых вариантах осуществления изобретения для повышения коэффициента усиления и чувствительности, как может требоваться в зависимости от выбранного сенсорного чипа, используются внешние по отношению к распознающему приближение чипу конденсаторы, расположенные последовательно или параллельно датчику. Для перекрестных помех и исключения действия тех или иных алюминиевых компонентов машины в качестве датчиков электронная плата обычно заземляется на "массу" технологической машины.
В некоторых вариантах осуществления изобретения подача сигнала на режущее полотно достигается посредством электрического соединения с одним или несколькими неподвижными и/или вращающимися элементами подшипника (наружная обойма и/или внутренняя обойма подшипника), обеспечивающими контакт с вращающимся валом, на котором закреплено режущее полотно. В других вариантах осуществления изобретения подача сигнала на режущее полотно достигается с помощью изолированной неподвижной пластины, например, пластины емкостной связи (сокр. ССР от англ. "Capacitive Coupling Plate"), установленной параллельно режущему полотну.
В некоторых вариантах осуществления изобретения передающий(-ие) сигналы провод(-а) активно экранируется(-ются) для исключения внесения в сигналы ошибок внешними возмущениями, такими как влияние массы, шум, движущиеся компоненты, руки и т.д. В некоторых вариантах осуществления изобретения активное экранирование обеспечивается путем разделения сигнала посредством неинвертирующего усилителя с единичным коэффициентом усиления (операционного усилителя).
В некоторых вариантах осуществления изобретения, использующих обнаружение приближения, датчики защищены от массы активными экранами для формирования требуемой зоны чувствительности, соотнесенной с конкретным режущим устройством. Экраны могут быть электрически изолированы от относящихся к массе компонентов и от прикосновений со стороны пользователей.
В различных вариантах осуществления изобретения рассматриваемый в данном описании предохранительный контур используется в любой стационарной или ручной технологической машине, включая торцовочные пилы, настольные пилы, ручные циркулярные пилы, ленточные пилы, вертикально-фрезерные станки, сверлильные машины и т.д. В каждом из этих вариантов осуществления изобретения предохранительный контур приспособлен к конкретному режущему устройству, входящему в состав машины. Кроме того, в различных вариантах осуществления изобретения рассматриваемый в данном описании предохранительный контур используется в технологических машинах с питанием от электрической сети и аккумуляторов.
Кроме того, хотя предохранительная система описана выше в контексте конфигурации с использованием взаимной емкости, в некоторых вариантах осуществления изобретения она выполнена, в качестве дополнения или альтернативы, в конфигурации с использованием собственной емкости. В таких вариантах осуществления изобретения емкостный датчик прикосновения или приближения выполнен таким образом, чтобы сигнал подавался на режущее полотно, электрически изолированное от остальной технологической машины, что делает режущее полотно датчиком. Конфигурации с использованием собственной емкости особенно эффективны для торцовочных пил, настольных пил, циркулярных пил, ленточных пил и любых иных ручных или стационарных технологических машин. В качестве примера, на фиг. 10 показана схема торцовочной пилы, которая аналогична схеме на фиг. 2, но в которой приемники 170-182 и чип 168 емкостного зондирования заменены емкостным датчиком прикосновения или приближения 270. В отличие от чипа 168 емкостного зондирования, который в некоторых вариантах осуществления изобретения реализован в виде устройства на основе технологий GestIC, QMatrix или аналогичных технологий, емкостный бесконтактный датчик 270 выполнен в виде устройства на основе микроконтроллера mTouch, QTouchADC или аналогичного чипа.
В некоторых вариантах осуществления изобретения сенсорные устройства включают в себя один или несколько емкостных датчиков прикосновения или приближения, расположенных на верхнем ограждении, столе и/или вставке стола с пазом под пильный диск, с пильным диском или без пильного диска как датчика для торцовочных пил. В некоторых вариантах осуществления изобретения сенсорные устройства включают в себя один или несколько емкостных датчиков прикосновения или приближения, расположенных на элементе ограждения в виде камертона, столе, вставке стола с пазом под пильный диск и/или пластмассовом ограждении (защитном кожухе), с пильным диском или без пильного диска как датчика для настольных пил. В некоторых вариантах осуществления изобретения сенсорные устройства включают в себя один или несколько емкостных датчиков прикосновения или приближения, расположенных на неподвижном ограждении, подвижном ограждении (защитном кожухе) и/или опорной плите (подошве), с пильным диском или без пильного диска как датчика для ручных циркулярных пил.
В изобретении предлагается система предупреждения травмирования, содержащая предохранительный контур, также называемый сенсорной системой, и систему реагирования. Сенсорная система, смонтированная на технологической машине, обнаруживает присутствие ткани человеческого тела в опасной области машины и активирует систему реагирования.
Благодарю оснащению технологической машины по меньшей мере одним емкостным датчиком прикосновения или приближения, предохранительный контур обеспечивает пространственное распознавание посредством алгоритма распознавания. Пространственное распознавание включает в себя контроль положения режущего полотна относительно связанного с массой ориентира (например, стола/станины/упорной планки/опорной плиты торцовочных пил/настольных пил/циркулярных пил) и соответствующую коррекцию порога активирования (срабатывания) для обнаружения ткани человеческого тела. В некоторых вариантах осуществления изобретения контроль положения режущего полотна осуществляется при помощи по меньшей мере одного емкостного бесконтактного датчика. В некоторых вариантах осуществления изобретения для определения положения режущего полотна относительно земли используется один или несколько энкодеров (кодовых датчиков), потенциометров, индуктивных бесконтактных датчиков и/или емкостных бесконтактных датчиков. В одних вариантах осуществления изобретения близость части тела пользователя к режущему полотну определяется теми же датчиками, что контролируют положение режущего полотна, тогда как в других вариантах для этого используются отдельные датчики.
В некоторых вариантах осуществления изобретения безопасная зона, заданная для предохранительного контура, определяется для торцовочных пил положением режущего полотна, включающим в себя положения, при которых пильный блок поднят, пильный блок опущен, пильный блок поднят в вытянутом или убранном положении, пильный блок опущен в вытянутом или убранном положении, и любую комбинацию положений по углу наклона относительно вертикальной и горизонтальной плоскости с подъемом/опусканием пильного блока. В некоторых вариантах осуществления изобретения для настольных пил положение режущего полотна задается как переменные положения режущего полотна по высоте относительно стола и как переменные положения режущего полотна по высоте в комбинации с положением по углу наклона. В некоторых вариантах осуществления изобретения для циркулярных пил положение режущего полотна задается как переменные положения по глубине пропила относительно опорной плиты и как переменные положения режущего полотна по высоте в комбинации с положением по углу наклона.
Алгоритм распознавания обеспечивает пространственное распознавание, что в некоторых вариантах осуществления изобретения включает в себя определение положения пользователя по отношению к режущему полотну с помощью одного или нескольких приемников и сравнение определенного таким образом положения со скорректированной безопасной зоной для определения того, нужно ли послать в систему реагирования останавливающий сигнал.
Пространственное распознавание основано на контроле любых требуемых фиксированных зон защиты, расположенных спереди, спереди-слева, спереди-справа, сзади, сзади-слева, сзади-справа, снизу от режущего полотна или в любых положениях относительно режущего полотна. При установлении наличия небезопасной ситуации пространственное распознавание в некоторых вариантах осуществления изобретения обеспечивает, помимо определения положения руки, также определение скорости приближения руки. Таким образом, пространственное распознавание основано на контроле регулируемых зон защиты, т.е. зон защиты, изменяемых путем варьирования порогов, в зависимости от положения пильного блока/режущего полотна (например, поднятого или опущенного пильного блока и т.д.) и/или скорости приближения руки, для сведения к минимуму вмешательств предохранительной системы в работу технологической машины с учетом привычек пользователя при резании заготовок.
В качестве дополнения или альтернативы, пространственное распознавание, обеспечиваемое алгоритмом распознавания, может задействовать другие технологии восприятия, включающие в себя, без ограничения нижеперечисленным, индуктивные бесконтактные датчики и оптические датчики. Пространственное распознавание, обеспечиваемое алгоритмом распознавания, может использоваться в сенсорных панелях, компьютерных мышах, смартфонах, планшетах и т.д.
Таким образом, в изобретении предлагается сенсорная система, использующая емкостные датчики и чипы бесконтактного емкостного зондирования с несколькими каналами, что позволяет использовать на технологической машине несколько конфигураций датчиков для пространственного распознавания. Множественность каналов позволяет реализовать пространственное распознавание для определения положения пользователя относительно опасной области технологической машины с использованием различных вариантов взаимного расположения датчиков. Например, в торцовочных пилах чипы емкостного зондирования с использованием собственной емкости могут быть выполнены таким образом, чтобы сигнал излучался пильным диском, верхним ограждением, столом и/или вставкой стола с пазом под пильный диск. Чипы емкостного зондирования с использованием взаимной емкости могут быть выполнены таким образом, чтобы сигнал излучался пильным диском, а приемники были расположены на верхнем ограждении, столе и/или вставках стола с пазом под пильный диск. Использование пространственного распознавания позволяет использовать емкостные бесконтактные датчики, определяющие приближение объекта, без опасения влияния массы на сигнал датчика. Кроме того, изобретение дает возможность использовать регулируемые зоны защиты, что позволяет настраивать зону защиты в зависимости от положения режущего полотна относительно стола. Изобретение в раскрытых вариантах его осуществления обеспечивает уменьшение размеров электронной платы, что позволяет получить более компактную конструкцию, которая может быть реализована в большем числе применений.
Хотя изобретение было подробно рассмотрено выше на поясняемых чертежами примерах его осуществления, эти примеры должны рассматриваться как иллюстративные и не ограничивающие возможностей осуществления изобретения. В описании представлены только предпочтительные варианты осуществления изобретения, а объем охраны изобретения определяется его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2501649C2 |
| ТОРЦОВОЧНАЯ ПИЛА С ЦЕПНОЙ ПЕРЕДАЧЕЙ | 2014 |
|
RU2664319C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2008 |
|
RU2484929C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С СИСТЕМОЙ ТОРМОЖЕНИЯ | 2009 |
|
RU2516426C2 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2495319C2 |
| ПРЕДОХРАНИТЕЛЬНАЯ СИСТЕМА ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2008 |
|
RU2508976C2 |
| СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2509641C2 |
| РЕВЕРСИВНАЯ СИСТЕМА ЭКСТРЕННОГО ТОРМОЖЕНИЯ ДЛЯ ТЕХНОЛОГИЧЕСКИХ МАШИН | 2009 |
|
RU2516419C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2007 |
|
RU2459138C2 |
| РУЧНАЯ МАШИНА, ПРЕЖДЕ ВСЕГО ЛОБЗИКОВАЯ ПИЛА, ДИСКОВАЯ ПИЛА, ФРЕЗЕРНАЯ МАШИНА ИЛИ РУБАНОК | 2009 |
|
RU2533073C2 |







Группа изобретений относится к деревообрабатывающей промышленности, в частности к предохранительным устройствам для пил. Технологическая машина содержит режущее устройство, сенсорную систему, запоминающее устройство, процессор, систему реагирования. Сенсорная система расположена вблизи режущего устройства. Система реагирования функционально связана с режущим устройством. В запоминающем устройстве хранятся программные команды и алгоритм пространственного распознавания. Процессор функционально связан с системой реагирования, сенсорной системой и запоминающим устройством. Посредством сенсорной системы обнаруживают часть человеческого тела в зоне чувствительности, соотнесенной с режущим устройством технологической машины. При обнаружении части человеческого тела определяют ее положение в зоне чувствительности путем выполнения с помощью процессора алгоритма пространственного распознавания. На основании определенного положения части человеческого тела посредством процессора устанавливают наличие небезопасной ситуации и активируют систему реагирования для уменьшения угрозы, связанной с небезопасной ситуацией. Упрощается конструкция и повышается надежность устройства. 2 н. и 18 з.п. ф-лы, 10 ил.
1. Технологическая машина, содержащая режущее устройство, сенсорную систему, расположенную вблизи режущего устройства, систему реагирования, функционально связанную с режущим устройством, запоминающее устройство, в котором хранятся программные команды и алгоритм пространственного распознавания, и процессор, функционально связанный с системой реагирования, сенсорной системой и запоминающим устройством и способный выполнять программные команды для: обнаружения части человеческого тела в зоне чувствительности, соотнесенной с режущим устройством, определения положения обнаруженной части человеческого тела в зоне чувствительности с использованием алгоритма пространственного распознавания, установления наличия небезопасной ситуации на основании определенного положения части человеческого тела и активирования системы реагирования.
2. Технологическая машина по п. 1, в которой сенсорная система содержит чип емкостного зондирования и один или несколько приемников, а процессор также способен выполнять программные команды для получения соответствующего сигнала от приемника или каждого из приемников, причем соответствующие сигналы используются для определения положения части человеческого тела.
3. Технологическая машина по п. 2, в которой процессор способен выполнять программные команды для определения положения обнаруженной части человеческого тела в зоне чувствительности относительно движущегося компонента режущего устройства.
4. Технологическая машина по п. 3, в которой движущийся компонент включает в себя режущее полотно, а чип емкостного зондирования функционально связан с режущим полотном с возможностью излучения режущим полотном сигнала от чипа емкостного зондирования.
5. Технологическая машина по п. 4, в которой процессор способен выполнять программные команды для установления наличия небезопасной ситуации на основании определяемых скорости и направления движения части человеческого тела.
6. Технологическая машина по п. 5, в которой процессор способен выполнять программные команды для задания опасной зоны по отношению к режущему полотну и установления наличия небезопасной ситуации на основании определенного положения части человеческого тела и опасной зоны.
7. Технологическая машина по п. 6, в которой процессор способен выполнять программные команды для задания опасной зоны на основании определяемого положения режущего полотна.
8. Технологическая машина по п. 7, в которой процессор способен выполнять программные команды для задания опасной зоны на основании определяемого положения ограждения, расположенного вокруг части режущего полотна.
9. Технологическая машина по п. 7, в которой сенсорная система содержит несколько приемников, включающих в себя: первый приемник, расположенный вблизи переднего участка режущего полотна; второй приемник, расположенный за первым приемником и вблизи первой стороны режущего полотна; и третий приемник, расположенный за первым приемником и вблизи второй стороны режущего полотна, противоположной первой стороне.
10. Технологическая машина по п. 9, в которой приемники включают в себя: четвертый приемник, расположенный вблизи заднего участка режущего полотна; пятый приемник, расположенный перед четвертым приемником и вблизи первой стороны режущего полотна; и шестой приемник, расположенный перед четвертым приемником и вблизи второй стороны режущего полотна.
11. Технологическая машина по п. 7, в которой процессор выполнен с возможностью задания опасной зоны на основании определяемого положения ограждения, расположенного вокруг части режущего полотна, во время изменения положения ограждения режущего полотна.
12. Способ управления работой технологической машины, характеризующийся тем, что: посредством сенсорной системы обнаруживают часть человеческого тела в зоне чувствительности, соотнесенной с режущим устройством технологической машины; при обнаружении части человеческого тела определяют ее положение в зоне чувствительности путем выполнения с помощью процессора алгоритма пространственного распознавания, хранящегося в запоминающем устройстве; на основании определенного положения части человеческого тела посредством процессора устанавливают наличие небезопасной ситуации; и посредством процессора активируют систему реагирования для уменьшения угрозы, связанной с небезопасной ситуацией.
13. Способ по п. 12, в котором часть человеческого тела обнаруживают посредством чипа емкостного зондирования и одного или нескольких приемников, а положение части человеческого тела определяют с использованием одного или нескольких сигналов, получаемых процессором от одного или нескольких приемников.
14. Способ по п. 13, в котором положение части человеческого тела определяют с использованием одного или нескольких сигналов относительно движущегося компонента режущего устройства.
15. Способ по п. 14, также включающий излучение сигнала режущим полотном режущего устройства посредством чипа емкостного зондирования.
16. Способ по п. 15, в котором наличие небезопасной ситуации устанавливают посредством процессора на основании определяемых скорости и направления движения части человеческого тела.
17. Способ по п. 16, в котором посредством процессора также определяют положение режущего полотна и с использованием определенного положения режущего полотна задают опасную зону путем выполнения с помощью процессора программных команд, хранящихся в запоминающем устройстве, причем наличие небезопасной ситуации устанавливают посредством процессора на основании заданной опасной зоны.
18. Способ по п. 17, в котором опасную зону задают на основании определяемого положения ограждения, расположенного вокруг части режущего полотна.
19. Способ по одному из пп. 13-18, в котором используют несколько приемников, причем определение положения части человеческого тела включает: анализ одного или нескольких первых сигналов, полученных от первого приемника, расположенного вблизи переднего участка режущего полотна; анализ одного или нескольких вторых сигналов, полученных от второго приемника, расположенного за первым приемником и вблизи первой стороны режущего полотна; и анализ одного или нескольких третьих сигналов, полученных от третьего приемника, расположенного за первым приемником и вблизи второй стороны режущего полотна, противоположной первой стороне.
20. Способ по п. 19, в котором определение положения части человеческого тела включает: анализ одного или нескольких четвертых сигналов, полученных от четвертого приемника, расположенного вблизи заднего участка режущего полотна; анализ одного или нескольких пятых сигналов, полученных от пятого приемника, расположенного перед четвертым приемником и вблизи первой стороны режущего полотна; и анализ одного или нескольких шестых сигналов, полученных от шестого приемника, расположенного перед четвертым приемником и вблизи второй стороны режущего полотна.
| US 2012186699 A1, 26.07.2012 | |||
| WO 2010059786 A1, 27.05.2010 | |||
| US 2011048197 A1, 03.03.2011 | |||
| КОНТРОЛЬНОЕ УСТРОЙСТВО ДЛЯ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2006 |
|
RU2456133C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2007 |
|
RU2459138C2 |

